
MEFA: Multimodal Image Early Fusion with Attention Module for
Pedestrian and Vehicle Detection
Yoann Dupas
1,2 a
, Olivier Hotel
2 b
, Gr
´
egoire Lefebvre
2 c
and Christophe C
´
erin
1,3 d
1
Datamove, Inria, LIG, University Grenoble-Alpes, France
2
Orange Innovation, Meylan, France
3
LIPN, University Sorbonne Paris Nord, France
Keywords:
Image Fusion, Multimodal Fusion, Early-Fusion, Attention, Pedestrian and Vehicle Detection, Adverse
Weather.
Abstract:
Pedestrian and vehicle detection represents a significant challenge in autonomous driving, particularly in ad-
verse weather conditions. Multimodal image fusion addresses this challenge. This paper proposes a new
early-fusion attention-based approach from visible, infrared, and LiDAR images, designated as MEFA (Multi-
modal image Early Fusion with Attention). In this study, we compare our MEFA proposal with a channel-wise
concatenation early-fusion approach. When coupled with YOLOv8 or RT-DETRv1 for pedestrian and vehicle
detection, our contribution is promising in adverse weather conditions (i.e. rainy days or foggy nights). Fur-
thermore, our MEFA proposal demonstrated superior mAP accuracy on the DENSE dataset.
1 INTRODUCTION
Deep learning fusion techniques are significantly im-
pacting a number of fields, including autonomous
driving (AD) and autonomous driver assistance sys-
tems (ADAS). In particular, they address the chal-
lenge of perceiving the world and the challenge of
decision-making.
World perception systems extract essential infor-
mation from raw image data for decision making.
They include three tasks: localization, detection, and
tracking (Mart
´
ınez-D
´
ıaz and Soriguera, 2018). Effec-
tive performance requires accuracy, weather robust-
ness, efficiency with imprecise sensors, real-time pro-
cessing (Xiang et al., 2023), and reduced energy con-
sumption (Malawade et al., 2022).
However, such systems face many challenges, in-
cluding the variability of object shapes, potential oc-
clusions, variations in lighting, and the prevalence
of adverse weather conditions (Mart
´
ınez-D
´
ıaz and
Soriguera, 2018). The process of image fusion serves
to address the limitations of perception and decision-
making systems. The fusion of multiple cameras al-
lows the acquisition of data that is both rich and high-
dimensional, and which is also complementary by na-
a
https://orcid.org/0009-0001-2080-3842
b
https://orcid.org/0009-0005-9688-4326
c
https://orcid.org/0000-0002-1325-3010
d
https://orcid.org/0000-0003-0993-9826
ture (Xiang et al., 2023). In (Huang et al., 2022),
the authors present a taxonomy of three fusion strate-
gies. The first of these is early fusion, or data-data
fusion, which involves the merging of data that has
been prepared to be spatially homogeneous. This
strategy identifies correlations between image chan-
nels and generates a global fused image that is com-
patible with some existing object recognition mod-
els (Stahlschmidt et al., 2022), provided that the first
layer of the model can be adapted to this kind of fused
image. The second fusion strategy, known as deep fu-
sion or feature-feature fusion, involves the merging
of latent space features generated by a backbone mo-
dule into a common latent space. Finally, late fusion,
or results-results fusion, represents a further approach
whereby final object detection is mixed with different
strategies, including voting methods, stacking meth-
ods, and those based on Dempster-Shafer or Possibil-
ity Theory (Chen et al., 2022).
This article concentrates on the early fusion strat-
egy, which we consider to be a valuable approach for
generating fused images that include all the informa-
tion required by a single-modality object detection
model to perform object detection accurately. This
strategy makes it possible to utilize the most recent
single-modality models from the literature, such as
YOLO (You Only Look Once (Terven et al., 2023)) or
RT-DETR (Real-Time Detection Transformer (Zhao
et al., 2024)), and to benefit from their enhanced per-
formance. Furthermore, in our view, the use of atten-
610
Dupas, Y., Hotel, O., Lefebvre, G. and Cérin, C.
MEFA: Multimodal Image Ear ly Fusion with Attention Module for Pedestrian and Vehicle Detection.
DOI: 10.5220/0013236000003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
610-617
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
tion mechanisms can help to improve accuracy and
robustness in the context of challenging weather con-
ditions. By assigning weights to information, it en-
ables the neural network to identify and select rele-
vant information from each modality and to correlate
them with information from the other modality.
The paper is structured as follows. Section 2
proposes the main related and recent work on im-
age attention-based fusion for pedestrian and vehicle
detection. Section 3 explains in detail the proposed
MEFA module. Section 4 presents the experimental
protocol. Section 5 presents the analysis of the per-
formances in global conditions and different weather
conditions. Section 6 discusses the contributions and
the results. Finally, Section 7 concludes this article
and gives some perspectives.
2 RELATED WORKS
Recent studies address the topics of multimodal fu-
sion with deep learning techniques based on attention
modules (Chaturvedi et al., 2022), (Tabassum and El-
Sharkawy, 2024).
The article (Chaturvedi et al., 2022) presents a
deep fusion approach with its Global-Local Atten-
tion (GLA) framework aiming at improving object de-
tection in adverse weather conditions, such as light
fog, dense fog, and snow. The GLA framework uti-
lizes multimodal sensor fusion, integrating data from
cameras, gated cameras, and LiDAR at two stages:
early-stage fusion through a Local Attention Network
and late-stage fusion via a Global Attention Network.
This dual approach allows the system to adaptively
focus on the most effective sensor data based on the
specific weather conditions. The GLA framework’s
architecture enables it to extract local and global fea-
tures, addressing the shortcomings of existing meth-
ods that typically rely on simple concatenation or
element-wise addition for sensor fusion. By employ-
ing attention mechanisms, the GLA framework can
dynamically allocate higher weights to the modal-
ity that exhibits better detection capabilities, thus en-
hancing the robustness of object detection.
In (Tabassum and El-Sharkawy, 2024), the au-
thors introduce a multi-head attention approach to
enhance vehicle detection in adverse weather condi-
tions, specifically focusing on the MVDNet (Multi-
modal Vehicle Detection Network). This model in-
tegrates a multi-head attention layer to improve the
processing and fusion of multimodal sensor data, such
as LiDAR and radar. By employing a multi-head at-
tention mechanism, the MVDNet can dynamically fo-
cus on various aspects of the input data, allowing for
a more comprehensive analysis and improved detec-
tion accuracy. The methodology involves two main
stages: the Region Proposal Network (RPN) for gen-
erating initial proposals from sensor data, and the
Region Fusion Network (RFN) for integrating these
proposals. The multi-head attention layer is strategi-
cally placed within the RFN to enhance feature ex-
traction from LiDAR and radar inputs. The paper
demonstrates that the multi-head MVDNet signifi-
cantly outperforms baseline models and other sensor
fusion techniques.
These two papers propose some advantages. No-
tably, both emphasize the importance of multimodal
sensor fusion to improve object detection perfor-
mance in challenging weather conditions. The pro-
posed frameworks leverage advanced attention mech-
anisms to dynamically adjust the focus on different
sensor modalities, leading to significantly higher de-
tection accuracy compared to traditional methods that
rely on single sensors.
Nevertheless, some limitations persist. Both
frameworks are intimately related to the object de-
tection framework they use. For example, in paper
(Tabassum and El-Sharkawy, 2024) they use a two-
stage object detection model, which may not be adapt-
able to a one-stage detection model, which are more
suitable for a real-time object detection. In paper
(Chaturvedi et al., 2022), the GLA framework may be
difficult to adapt to a new state-of-the-art model that
uses a transformer-based approach, such as the VIT
(Dosovitskiy et al., 2020) model.
To limit these drawbacks, we propose the MEFA
module, described in the next section.
3 MEFA : MULTIMODAL EARLY
FUSION WITH ATTENTION
Raw
RGB
Raw
IR
Raw
LiDAR
Processed
RGB
Processed
IR
Processed
LiDAR
MEFA
Fused
Image
Object
Detection
Model
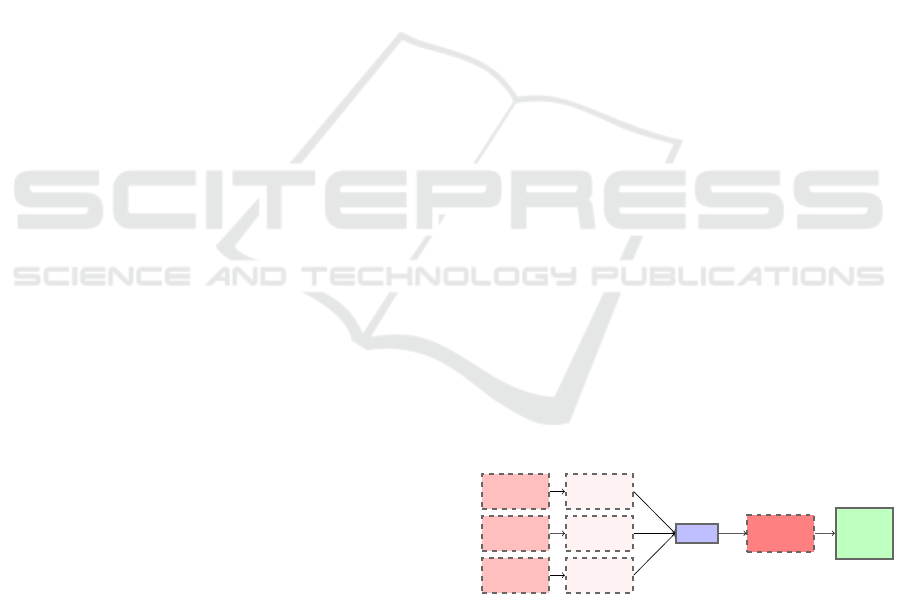
Figure 1: Overview of MEFA framework. The data ob-
tained from the various sensors are transformed and sub-
sequently transmitted to the MEFA module. This module
generates an intermediate fused image, which represents the
fusion of all input sensor data. This intermediate fused im-
age is then provided to a single-modality object detection
model, which can identify objects.
The pedestrian and vehicle detection framework, as
illustrated in Figure 1, consists of multiple modules.
Initially, the input images pass through image pro-
MEFA: Multimodal Image Early Fusion with Attention Module for Pedestrian and Vehicle Detection
611
Processed
RGB
Processed
IR
Processed
LiDAR
Inception
Block A
Inception
Block A
Inception
Block A
Local
Attention
Local
Attention
Local
Attention
N
N
N
L
Inception
Block A
Global
Attention
Global
Attention
Global
Attention
N
N
N
L
Convolutional
Layer
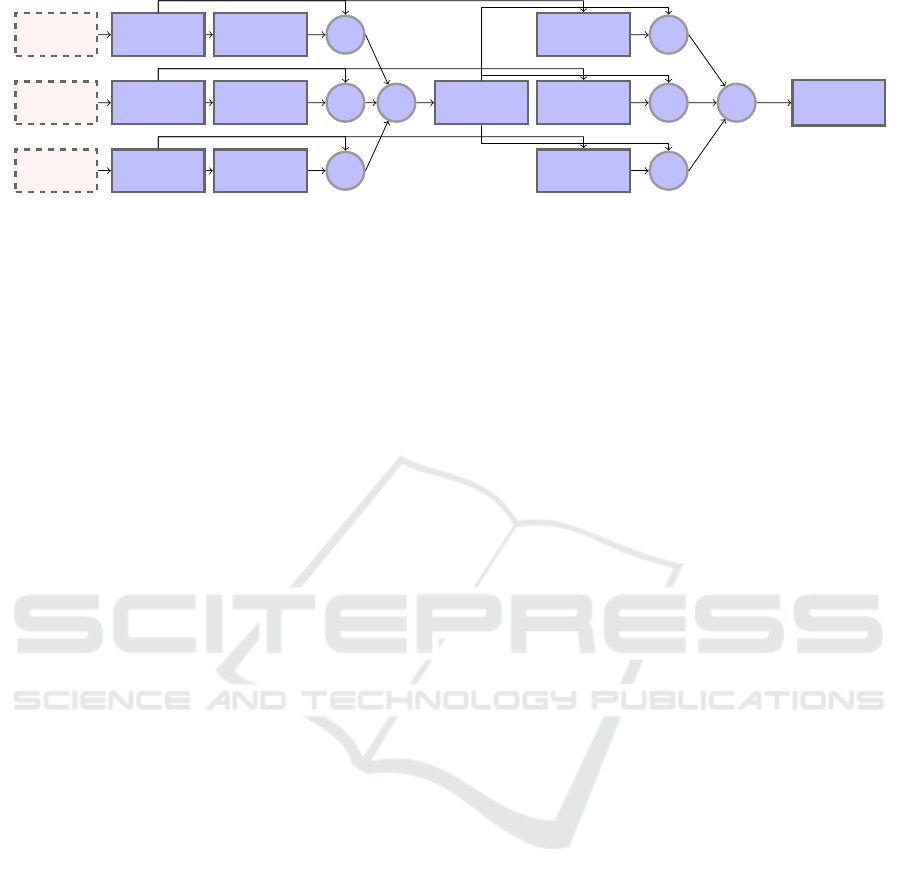
Figure 2: The MEFA module consists of three streams, where the input is initially convoluted by an inception block and
subsequently provided to the local attention block. The output features are then multiplied by the output features of the incep-
tion block. The output from each stream is then combined through an addition operation. This fused output is subsequently
passed to an additional inception block, after which it is sent to a global attention block. This block takes input from the first
inception block for its corresponding modality. The output is then multiplied by the fused output and added, forming the final
fused output. In the final step, the output is sent to a convolution layer, where it is transformed into a 3-channel output. The
N
corresponds to the multiplication operation and
L
corresponds to the addition operation.
cessing techniques to prepare them for fusion. Subse-
quently, an intermediate fused image is generated by
the MEFA module, which is compatible with state-
of-the-art image object detectors such as YOLOv8 or
RT-DETRv1 to predict pedestrian and vehicle objects.
3.1 Input Image Processing
The data transmitted by the vehicle sensors must
be transformed into a uniform image format. The
DENSE dataset (Bijelic et al., 2020) used in the ex-
periment provides data from three types of sensors:
an optical camera, an infrared camera, and a LiDAR
sensor. The following subsection will present a trans-
formation operation from raw to usable data.
3.1.1 Visible and Infrared Data Processing
The optical camera provides three-channel images
representing the red, blue, and green colors. In
the context of working with the YOLOv8 and RT-
DETRv1 models, which are dedicated to images, the
transformation operations consist of scaling to a res-
olution of 640 × 640 pixels (i.e., the size of the input
tensors), centering, and padding to fill in missing pix-
els.
The NIR (Near-InfraRed) gated camera captures
photons from a specified distance by opening and
closing the camera with a specified delay after emit-
ting a pulse of near-infrared light (Grauer, 2014). It
provides a batch of three grayscale images (i.e., one
channel) with a time difference of 100ms between
each image. The three images have been merged into
a single composite image, in order to align with the
input specifications of the YOLOv8 and RT-DETRv1
models.
3.1.2 LiDAR Data Processing
The LiDAR sensor provides raw data in the form of a
point cloud. A point cloud can be represented in three
ways: point-based, voxel-based, or 2D mapping-
based (Huang et al., 2022). The 2D mapping or
view-based representation is constructed by project-
ing points onto the camera coordinate system. This
approach allows alignment with other sensors and en-
ables the direct utilization of 2D convolutional neural
network architectures. To ensure data homogeneity, a
camera plane map representation on the optical cam-
era coordinate was selected. This encoding provides
an image where the points are aligned with the optical
camera image.
3.2 MEFA Module
As illustrated in Figure 2, we used approaches similar
to those utilized in deep fusion. In the first step, each
image stream is processed through convolution layers,
followed by attention layers. In the second step, the
feature maps from each stream are fused before pass-
ing through a new stage of convolution layers and at-
tention layers. The output goes through another stage
of convolution layers to parameterize the channel di-
mension of the output.
In contrast to deep-fusion approaches, convolu-
tion layers are not designed to create a high-level rep-
resentation feature space; rather, they are intended to
generate a new image representation containing all
relevant features from each modality. The attention
layer serves as a guide to select the specific informa-
tion required by the object detection model. In the
initial stage, it selects information from each stream,
regardless of the other modalities. In the subsequent
stage, a second attention layer is designed to utilize
the information from each modality to filter the fused
information from the preceding stage, thereby identi-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
612

fying only the relevant features.
The implementation of the MEFA module uses
the Inception Block version A from the Inception
V3 model (Szegedy et al., 2016) as convolution
layers and the Global Local Attention framework
(Chaturvedi et al., 2022) as attention layers. The local
attention network is used as the initial attention layer
for each stream. The global attention network is used
as the second attention stage with the fused feature
map of each stream. The fusion operation is the con-
catenation. The final convolution operation acts as a
channel operator, parameterizing the channel output
dimension to a three-channel image.
3.3 Object Detection Models
The MEFA module provides a fused image as an out-
put, which can be used with any single-modality ob-
ject detection model. Here we look at two main mod-
els from the literature.
3.3.1 YOLOv8
YOLOv8 (Jocher et al., 2023) is part of the lineage of
YOLO (You Only Look Once) object detection mod-
els. The end-to-end single-shot detector architecture
offers a significant advantage for real-time applica-
tions, representing a state-of-the-art model in terms
of speed and accuracy.
The model has three main parts: the backbone
extracts image features; the neck fuses these fea-
tures; and the head predicts bounding box coordi-
nates, object presence scores, and classification prob-
abilities. The model employs the Complete Intersec-
tion over Union (CIoU) loss and the Distribution Fo-
cal loss (DFL) during training. This approach en-
ables enhanced performance, particularly in the case
of smaller objects (Terven et al., 2023). YOLOv8 is
an anchor-free model, whereby means that the out-
put is bounding box coordinates rather than offsets
from existing anchors. The backbone is a modi-
fied CSPDarknet53 backbone with a new C2f module
(faster cross-stage partial bottleneck with two convo-
lutions). This module allows high-level features to be
combined with contextual information (Terven et al.,
2023).
3.3.2 RT-DETRv1
RT-DETRv1 (Zhao et al., 2024) is a hybrid object
detection model using a convolutional neural net-
work in conjunction with Transformers layers. The
end-to-end NMS-free (Non-Maximum Suppression)
architecture model consists of four distinct compo-
nents: a backbone, a hybrid coder with Attention-
based Intra-scale Feature Interaction (AIFI), a CNN-
based Cross-scale Feature Fusion (CCFF) layer, and
a decoder with an uncertainty-minimum query selec-
tion scheme. The function of the backbone is to ex-
tract features from the input image. The hybrid en-
coder uses these one-stage CNN features to generate
encoder features with the AIFI module. The CCFF
module merges the multi-scale features into a feature
map for the decoder. The final stage is the decoder,
which uses the output of the hybrid encoder to pre-
dict coordinates and object class. The uncertainty-
minimal query selection allows to optimize of the
query output of the encoder to select higher quality
features for the decoder head to predict the class and
localization of the object.
4 EXPERIMENTAL SETUP
The experiment was conducted utilizing the DENSE
database (Bijelic et al., 2020). The database com-
prises approximately 13, 000 images of driving scenes
captured under a variety of light and weather con-
ditions, including day and night, clear, snow, light,
and dense fog. The images were captured using an
optical camera, a NIR gated camera, and a LiDAR
sensor. Two datasets were prepared for training and
testing purposes, with joint annotation from the three
modalities. The training set contains approximately
100, 000 objects, while the test set contains approxi-
mately 20, 000 objects. The objects included in the
datasets are of two main types: pedestrian and vehi-
cle. The vehicle category includes ridable vehicles,
large vehicles, vehicles, and passenger cars.
In this study, the proposed MEFA module is eval-
uated by comparing it with an early fusion method,
i.e., channel-wise concatenation. The MEFA module
is evaluated on the MEFA 3c version, which outputs
an image with three channels. Each approach is eval-
uated with two object detection models, namely the
YOLOv8 and the RT-DETRv1 models. For the RT-
DETRv1 model, we employed the pre-trained weights
on the COCO dataset.
To prepare the early fusion data, we combined
data from the visible, infrared, and LiDAR modal-
ities at the channel level. The labels used for the
ground truth were labels from all modalities in the
visible camera coordinate systems. The input layer of
the YOLOv8 and RT-DETRv1 models was adapted to
support a tensor of nine channels.
In order to ensure a fair and accurate benchmark,
we established a well-defined experimental protocol
as follows. The initial stage of the process is to iden-
tify the optimal hyperparameters for the object detec-
MEFA: Multimodal Image Early Fusion with Attention Module for Pedestrian and Vehicle Detection
613

tion model. The search is conducted on the model
that has been adapted to the channel-wise concatena-
tion, and the optimal hyperparameters are employed
for all of the compared approaches concerning the ob-
ject detection model. The hyperparameters are opti-
mized through a grid search on one single fold of the
five k-folds of the training dataset. The hyperparame-
ters include the optimizer, the weight of the box loss,
the weight of the classification loss in the total loss
function, the initial and final learning rate, the opti-
mizer with momentum factor, the number of epochs
for learning rate warm-up with initial momentum, the
L2 regularization term, and the hyperparameters for
image augmentation techniques. Once these hyperpa-
rameters are identified, a final model is trained for one
hundred epochs to reach the performance plateau.
The hyperparameters search indicates the use of
the SGD optimizer, with a learning rate of 0.005
for YOLOv8 and 0.008 for RT-DETRv1, as well as
weight of the box loss of 0.03 and weight of the clas-
sification loss of 0.66 for YOLOv8 and 0.18 and 0.57
for RT-DETRv1. With regard to the MEFA module,
the decision was taken to fix the Inception A pool fea-
ture at 32, the local and global attention intermediate
output and final output feature at 64 and 256, respec-
tively.
5 EXPERIMENTAL RESULTS
In this section, we first present the quantitative results
with global object accuracy on the DENSE dataset
and for each weather condition. Secondly, the qual-
itative results are presented to offer a more detailed
explanation of the advantages and limitations of the
proposed approach.
5.1 Object Detection Accuracy
5.1.1 Overall Performances
Table 1 shows the mean average accuracy with IoU
at 50% (mAP
50
) on the validation and test sets with
the two object detection models (YOLOv8 and RT-
DETRv1). It can be observed that when the MEFA
module is combined with YOLOv8, the performance
improves in comparison to the channel-wise concate-
nation approach. These improvements are on average
0.85% across the five folds and up to 1% on the test
set. The MEFA module, when combined with RT-
DETRv1, also outperforms channel-wise concatena-
tion by 1.13% on the five folds and up to 0.5% on the
test set. This observation demonstrates the benefits of
using the MEFA module to fuse and select relevant
information from multimodal images.
Table 1: Accuracy results in mAP
50
on the DENSE dataset.
Models Mean accuracy Top 1 Accuracy
(Validation) (Validation) (Test)
Channel-Concatenation
+ YOLOv8 69.03% ± 0.64 69.65 % 70.80 %
MEFA
+ YOLOv8 69.88% ± 0.70 70.78 % 71.80%
Channel-Concatenation
+ RT-DETRv1 72.55% ± 0.65 73.12 % 73.60%
MEFA
+ RT-DETRv1 73.75% ± 0.53 74.42 % 74.30%
5.1.2 Performances According to Weather
Conditions
Figure 3 illustrates the recall values of MEFA and the
channel-wise concatenation approach with YOLOv8
and RT-DETRv1 according to the weather and time
of day on the test set. Images captured in clear and
snowy weather represent 90% of the total images
(62.7% and 27.4%, respectively). Labels in light fog,
heavy fog, and rain represent 6.1%, 3%, and 0.7% of
the images, respectively. The recall score was calcu-
lated on the prediction with a confidence score of 0.5
or above, and a detection was considered positive if
the intersection over the union was 0.5 or above.
In contrast to channel-wise concatenation, the in-
tegration of MEFA with YOLOv8 yields an increase
in object detection of 1.80%, 2.91%, 1.20%, 2.78%,
and 1.33% for clear, dense fog, light fog, rain, and
snow, respectively, across both daytime and night-
time conditions. MEFA, in combination with the RT-
DETRv1 model, has been observed to enhance ob-
ject detection by 3.94%, 3.39%, 3.67%, 2.78% and
4.04%, respectively, when compared to clear, dense
fog, light fog, rain and snow conditions, taken to-
gether on a daytime and night-time basis. In gen-
eral, MEFA has been found to improve recall accu-
racy across all weather conditions.
5.2 Qualitative Results
5.2.1 Intermediate Features Visualization
Figure 4 depicts the intermediate fused image of the
MEFA module output. It can be observed that the vis-
ible features represent most of the resulting images.
In this process, we analyze feature maps from local
attention outputs during the inference. In these out-
puts, only a small number of features are retained dur-
ing local attention for the infrared and LiDAR input,
whereas almost all features from visible input are re-
tained. Subsequently, we analyze feature maps from
global attention outputs. These outputs contain fea-
tures from all modalities input. These features func-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
614
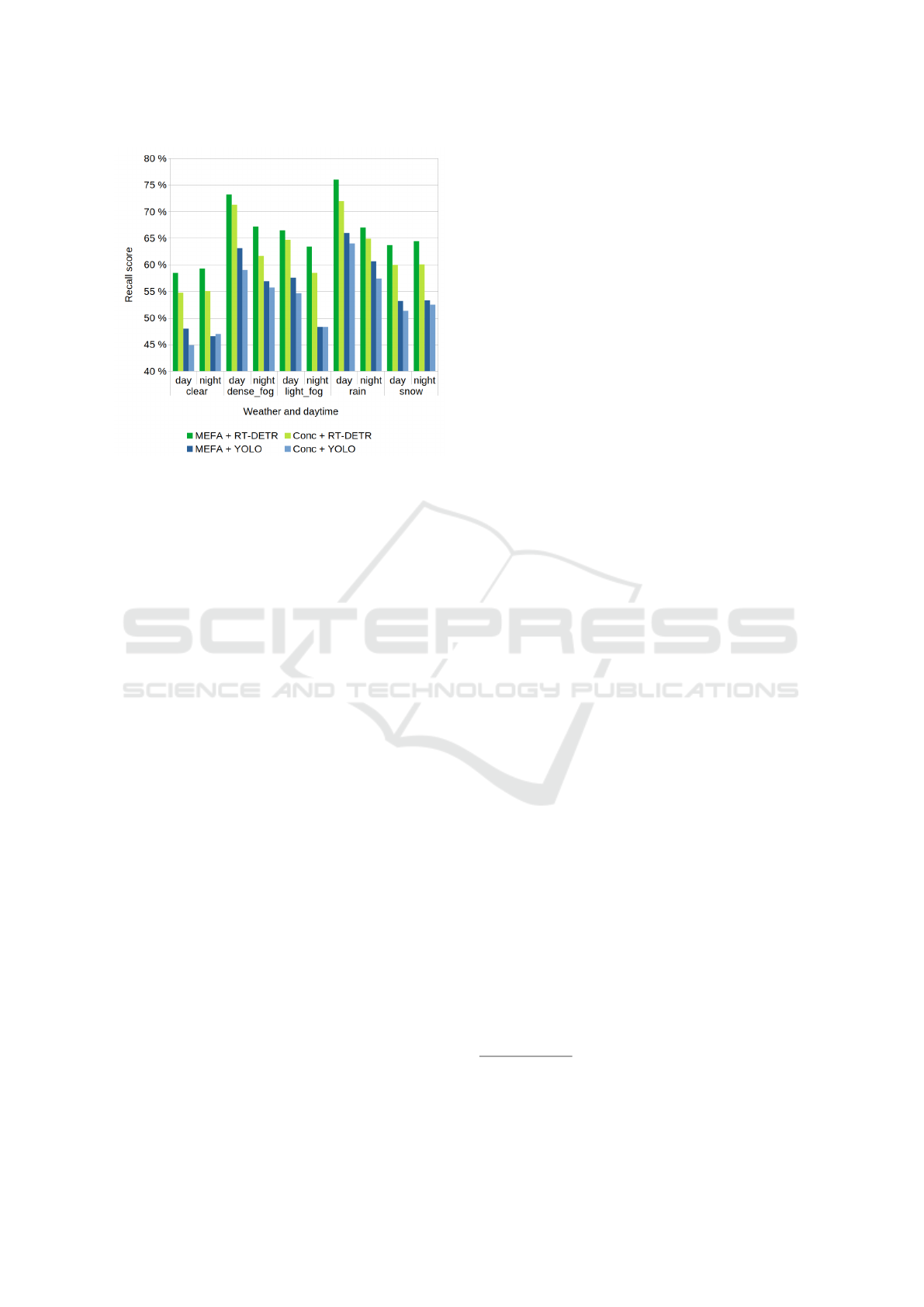
Figure 3: Recall performance according to weather and
daytime conditions. Models are RT-DETRv1 combined
with MEFA model (MEFA + RT-DETR) and with channel-
wise concatenation (Conc + RT-DETR); YOLOv8 model
combined with MEFA module (MEFA + YOLO) and with
channel-wise concatenation (Conc + YOLO).
tion as a filter to pick up relevant visible features that
play a determinant role during feature extraction of
object detection models.
5.2.2 Final Visual Results
Figure 5 illustrates the results obtained in two dis-
tinct weather conditions. The first two lines present
an example of the input in rainy conditions, while
the subsequent two lines illustrate an input in clear
night conditions. To demonstrate the potential limita-
tions of the channel-wise concatenation approach, the
confidence level of objects was set to 0.25, thereby
highlighting the occurrence of intriguing false posi-
tive pedestrian detection. In the first example, a false
positive pedestrian has been identified by the channel-
wise concatenation approach in the middle of the im-
age. The second example illustrates how the model,
when combined with MEFA, is more effective in de-
tecting vehicles on the right of the image that are dis-
cernible only in the LiDAR input image. The inter-
mediate fused image output of the first example is il-
lustrated in Figure 4.
6 DISCUSSION
The MEFA module demonstrates superior accuracy
when integrated with a one-stage object detection
model, YOLOv8, or a transformer-based model, RT-
DETRv1, compared to the channel-wise concatena-
tion early fusion approach with the same model. The
module uses an attention mechanism similar to the
mid-fusion scheme. This mechanism allows the mo-
dule to combine relevant features from each modality
by using local attention in the initial stage and then
filter these fused features with attention computed on
each modality feature, which acts as global atten-
tion. We hypothesize that an attention mechanism
is essential to enable the model to distinguish which
features are critical for detection and which features
must function as filters. This hypothesis enables the
creation of interactions between the multimodal fea-
tures, thereby improving accuracy performance, par-
ticularly in adverse weather conditions. In such con-
ditions, sensors can provide noisy data leading to false
detections. It also enables robust detection when sen-
sors are unable to provide information due to time of
day or weather conditions.
The output of the MEFA module is a feature
map that functions as a single modality image.
This property allows the utilization of state-of-the-
art single-modality models that are becoming increas-
ingly prevalent in the computer vision field. This as-
pect also permits more rapid training and enhanced
performance using pre-trained weights derived from
alternative datasets. Furthermore, by parameteriz-
ing the final convolution block to output features
as a three-channel image, it is now possible to em-
ploy black-box models not able to accept images
with more than three channels. This feature has also
prompted new investigations into the potential influ-
ence of this parameter on object detection outcomes.
Nevertheless, it is essential to acknowledge the in-
herent constraints of this approach. The module in-
troduces additional memory and computational con-
straints and operates at a processing speed of 200 mil-
liseconds, in comparison to the object model, which
operates at 5 milliseconds for YOLOv8 and 35 mil-
liseconds for RT-DETRv1
1
. Further ablation studies
could be conducted to gain a deeper understanding
of the role of the attention mechanism and whether
alternative strategies, such as Transformer-based at-
tention, could improve performance. Additionally, it
is crucial to recognize that data transformation, par-
ticularly in the case of LiDAR sensors, can result in
information loss.
1
The reference speed value was obtained on a Dell
Precision 5770 with an Intel® Core™ i7-12800H CPU, a
NVIDIA RTX A3000 12 GB GDDR6 GPU, and 32 GB of
DDR5 RAM.
MEFA: Multimodal Image Early Fusion with Attention Module for Pedestrian and Vehicle Detection
615
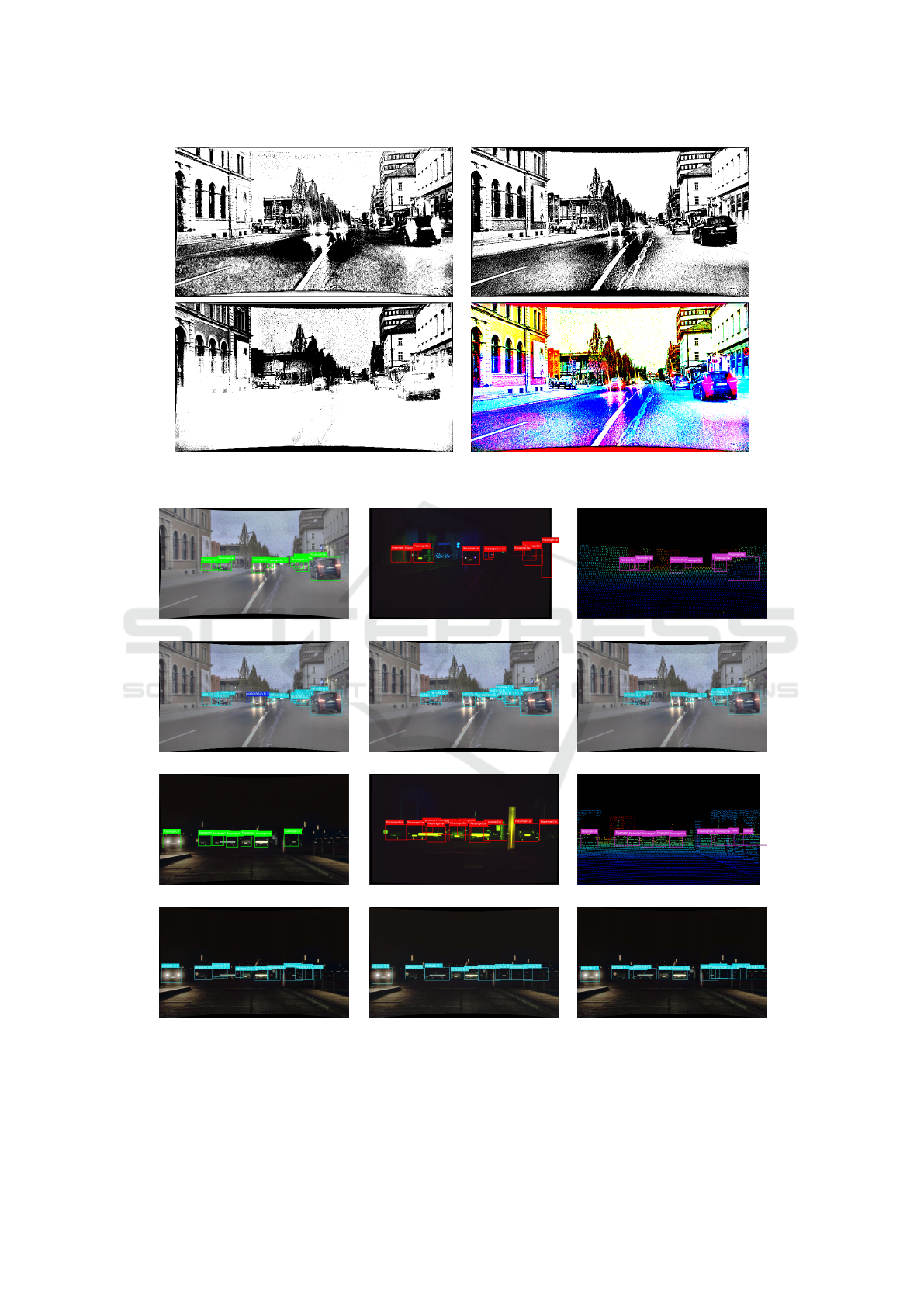
Figure 4: Example of intermediate fused image output from MEFA module combined with RT-DETRv1 model. Grayscale
images correspond to a specific single channel of the color image.
(Visible) (Infrared) (LiDAR)
(Concatenation + RT-DETRv1) (MEFA + RT-DETRv1) (MEFA + YOLOv8)
(Visible) (Infrared) (LiDAR)
(Concatenation + RT-DETRv1) (MEFA + RT-DETRv1) (MEFA + YOLOv8)
Figure 5: Examples of rain and clear night images. Visible, Infrared and LiDAR indicate visible, infrared and LiDAR sensor
images respectively with their ground truth labels. Concatenation + RT-DETRv1, MEFA + RT-DETRv1 and MEFA + YOLOv8
indicate the channel-wise concatenation or the MEFA module with the RT-DETRv1 model and the MEFA module combined
with the YOLOv8 model. Light blue and dark blue indicate vehicle and pedestrian detection respectively.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
616

7 CONCLUSION AND
PERSPECTIVES
This article presents a novel early fusion approach
based on our MEFA module. The MEFA module,
combined with state-of-the-art models, improves, es-
pecially in adverse weather conditions, the perfor-
mance accuracy of vehicle and pedestrian multimodal
detection. Furthermore, the MEFA module can im-
prove any single modality model, especially a black
box model, for any multimodal application.
In terms of future research, we identified several
potential avenues. Firstly, optimizing the module ar-
chitecture could reduce the computational load, espe-
cially when dealing with features of large spatial di-
mensions. Additional sensor types integration, such
as radar or ultrasonic sensors, would be beneficial
in investigating and improving detection robustness
in challenging conditions. Secondly, further research
could be carried out on the MEFA module to better
understand the impact of characteristics of modalities
and external factors, such as weather or visibility, on
the accuracy.
In light of climate change, we aim to direct our fu-
ture efforts toward enhancing the module to minimize
its energy consumption and evaluate the carbon foot-
print of our models. Furthermore, we intend to inves-
tigate the integration of our model into edge devices,
exploring innovative approaches to optimize perfor-
mance while maintaining sustainability. It would be
a question of conducting holistic research consider-
ing the dimensions of (a) measurements and estima-
tions, (b) algorithms, methods, and models, (c) ex-
treme edge, and (d) understanding the systemic ef-
fects of AI.
ACKNOWLEDGEMENTS
This work was carried out in part within the frame-
work of the ”Edge Intelligence” Chair within MIAI of
the University of Grenoble Alpes, project referenced
ANR-19-PIA3-0003.
REFERENCES
Bijelic, M., Gruber, T., Mannan, F., Kraus, F., Ritter, W.,
Dietmayer, K., and Heide, F. (2020). Seeing Through
Fog Without Seeing Fog: Deep Multimodal Sensor
Fusion in Unseen Adverse Weather. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 11682–11692.
Chaturvedi, S. S., Zhang, L., and Yuan, X. (2022). Pay ”at-
tention” to adverse weather: Weather-aware attention-
based object detection. In 2022 26th International
Conference on Pattern Recognition (ICPR), pages
4573–4579.
Chen, Y.-T., Shi, J., Ye, Z., Mertz, C., Ramanan, D.,
and Kong, S. (2022). Multimodal object detection
via probabilistic ensembling. In Avidan, S., Brostow,
G., Ciss
´
e, M., Farinella, G. M., and Hassner, T., edi-
tors, Computer Vision – ECCV 2022, pages 139–158,
Cham. Springer Nature Switzerland.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Min-
derer, M., Heigold, G., Gelly, S., Uszkoreit, J., and
Houlsby, N. (2020). An image is worth 16x16 words:
Transformers for image recognition at scale. ArXiv,
abs/2010.11929.
Grauer, Y. (2014). Active gated imaging in driver assistance
system. Advanced Optical Technologies, 3(2):151–
160.
Huang, K., Shi, B., Li, X., Li, X., Huang, S., and Li, Y.
(2022). Multi-modal Sensor Fusion for Auto Driving
Perception: A Survey.
Jocher, G., Chaurasia, A., and Qiu, J. (2023). Ultralytics
YOLO.
Malawade, A. V., Mortlock, T., and Faruque, M. A. A.
(2022). Ecofusion: Energy-aware adaptive sensor fu-
sion for efficient autonomous vehicle perception.
Mart
´
ınez-D
´
ıaz, M. and Soriguera, F. (2018). Autonomous
vehicles: Theoretical and practical challenges. Trans-
portation Research Procedia, 33:275–282.
Stahlschmidt, S. R., Ulfenborg, B., and Synnergren, J.
(2022). Multimodal deep learning for biomedical
data fusion: A review. Briefings in Bioinformatics,
23(2):bbab569.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wo-
jna, Z. (2016). Rethinking the inception architecture
for computer vision. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Tabassum, N. and El-Sharkawy, M. (2024). Vehicle detec-
tion in adverse weather: A multi-head attention ap-
proach with multimodal fusion. Journal of Low Power
Electronics and Applications.
Terven, J., C
´
ordova-Esparza, D.-M., and Romero-
Gonz
´
alez, J.-A. (2023). A comprehensive review of
yolo architectures in computer vision: From yolov1 to
yolov8 and yolo-nas. Machine Learning and Knowl-
edge Extraction, 5(4):1680–1716.
Xiang, C., Feng, C., Xie, X., Shi, B., Lu, H., Lv, Y., Yang,
M., and Niu, Z. (2023). Multi-Sensor Fusion and Co-
operative Perception for Autonomous Driving: A Re-
view. IEEE Intelligent Transportation Systems Maga-
zine, 15(5):36–58.
Zhao, Y., Lv, W., Xu, S., Wei, J., Wang, G., Dang, Q., Liu,
Y., and Chen, J. (2024). DETRs Beat YOLOs on Real-
time Object Detection.
MEFA: Multimodal Image Early Fusion with Attention Module for Pedestrian and Vehicle Detection
617
