
Multi-Modal Framework for Autism Severity Assessment Using
Spatio-Temporal Graph Transformers
Kush Gupta
a
, Amir Aly
b
and Emmanuel Ifeachor
c
University of Plymouth, Plymouth, U.K.
{kush.gupta, amir.aly, E.Ifecahor}@plymouth.ac.uk
Keywords:
Autism Spectrum Disorder, Severity, Spatio-Temporal Graph Transformer, Multi-Modal Data.
Abstract:
Diagnosing Autism Spectrum Disorder (ASD) remains challenging, as it often relies on subjective evaluations
and traditional methods using fMRI data. This paper proposes an innovative multi-modal framework that
leverages spatiotemporal graph transformers to assess ASD severity using skeletal and optical flow data from
the MMASD dataset. Our approach captures movement synchronization between children with ASD and ther-
apists during play therapy interventions. The framework integrates a spatial encoder, a temporal transformer,
and an I3D network for comprehensive motion analysis. Through this multi-modal approach, we aim to de-
liver reliable ASD severity scores, enhancing diagnostic accuracy and offering a scalable, robust alternative to
traditional techniques.
1 INTRODUCTION
Autism Spectrum Disorder (ASD) is a neurodevelop-
mental condition that affects brain development, in-
fluencing how individuals perceive and engage with
others, leading to challenges in social interaction and
communication. It also involves repetitive and re-
stricted patterns of behavior. The term ”spectrum” re-
flects the broad variety of symptom types and severity
levels associated with ASD. The exact causes of ASD
remain unclear, but research by (Lyall et al., 2017)
indicates that both genetic and environmental factors
are likely to contribute significantly. Traditional diag-
nostic techniques for ASD rely heavily on subjective
behavioral evaluations (such as ADOS
1
), which can
result in misidentification when distinguishing indi-
viduals with ASD from typically developing individ-
uals (TC). Misdiagnoses are often linked to insuffi-
cient training and experience among medical profes-
sionals. These diagnostic challenges complicate pedi-
atric screening efforts, as no straightforward diagnos-
tic method is available. Accurate severity diagnoses
a
https://orcid.org/0009-0008-9930-6435
b
https://orcid.org/0000-0001-5169-0679
c
https://orcid.org/0000-0001-8362-6292
1
The Autism Diagnostic Observation Schedule
(ADOS), developed by (Lord et al., 2000), is a partially
structured diagnostic tool. It is employed to evaluate and
determine the severity of autism spectrum disorder (ASD)
through a standardized scoring system.
of ASD often require continuous follow-up with pa-
tients to ensure dependable results.
Over the past two decades, structural MRI (sMRI)
(Nickl-Jockschat et al., 2012) and resting-state func-
tional MRI (rs-fMRI) (Santana et al., 2022) have
been extensively utilized by researchers to develop
machine learning models aimed solely at diagnosing
autism rather than assessing its severity. Moreover,
several challenges are associated with acquiring dif-
ferent types of MRI scans. First, MRI scanning is
highly expensive, making large-scale data collection
difficult. Second, individuals with autism spectrum
disorder (ASD) often experience heightened anxiety,
leading to discomfort while inside the MRI scanner.
As a result, patients tend to move their heads during
the scan, introducing noise into the data. Despite ex-
tensive pre-processing efforts, this noise remains dif-
ficult to eliminate, which affects the model’s perfor-
mance.
To resolve these challenges, one effective way
is to use movement synchronization to assess ASD
severity using intervention videos. Movement syn-
chronization refers to the harmony of body gestures
among interacting individuals, typically a therapist
and an individual with ASD. Movement synchroniza-
tion in psychological treatment could indicate a strong
relationship between the individual and a psycholo-
gist (Nagaoka and Komori, 2008). Our technique ex-
amines movement synchronization between kids with
ASD and therapeutic professionals during interac-
686
Gupta, K., Aly, A. and Ifeachor, E.
Multi-Modal Framework for Autism Severity Assessment Using Spatio-Temporal Graph Transformers.
DOI: 10.5220/0013236900003911
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 18th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2025) - Volume 2: HEALTHINF, pages 686-693
ISBN: 978-989-758-731-3; ISSN: 2184-4305
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

tive therapy sessions. Based on the movement syn-
chronization between the therapist and the child with
ASD, an ASD severity score is assigned by our pro-
posed framework.
Furthermore, an effective approach would involve
using modalities such as skeletal data and optical
flow, rather than directly processing the raw inter-
vention videos. These modalities are preferred over
raw RGB videos, as they provide more comprehen-
sive information about body movements irrespective
of the changes in the background and require less pro-
cessing time. Optical flow refers to the perceived
motion of individual pixels across two consecutive
frames within an image plane. Extracted from raw
video data, optical flow offers a compact represen-
tation of both the motion region and its velocity,
enabling motion analysis without revealing personal
identity . Skeleton data refers to a simplified repre-
sentation of a human figure, capturing only key points
(such as joints) of the body rather than full images or
detailed appearances. These key points—such as the
head, shoulder blades, elbows, wrists, hips, and knees
are connected by lines that form a skeletal structure,
representing the human body in a minimalistic way.
Hence, in our approach, we utilize the skele-
ton data, along with optical flow information, from
the MMASD dataset (Li et al., 2023). This multi-
modal dataset is derived from interactive therapeu-
tic interventions for children having autism. A total
of 1,315 video clips were collected from 32 children
with autism. Each sample includes three modalities
taken from the raw videos: optical flow, 2D skeleton,
and 3D skeleton. Also, the clinician evaluated the
individuals with ASD and provided ADOS-2 scores
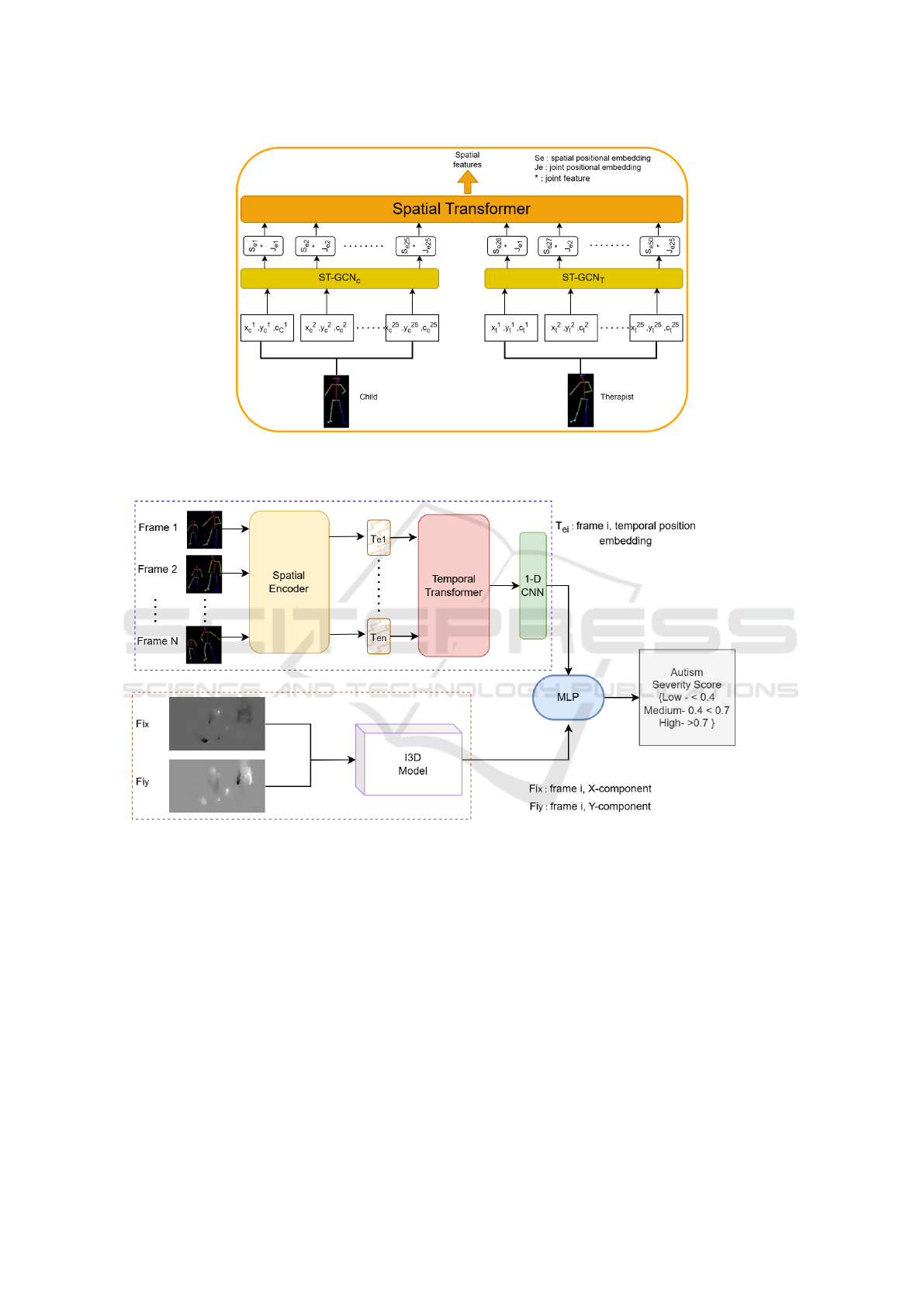
for each child. Our proposed architecture is struc-
tured as an ensemble network comprising two pri-
mary branches to process these different modalities as
demonstrated in Figure (1b). The first branch (shown
in the dotted blue rectangle) consists of a spatial en-
coder and a temporal transformer to process skeletal
data, while the second branch (dotted orange rectan-
gle) utilizes a 3D convolutional network to incorpo-
rate optical flow information. Finally, a multilayer
perceptron (MLP) serves as the classifier head, pro-
viding an autism severity score based on the child’s
performance when compared to the therapist during
the intervention activity.
In summary, our approach will focus on utiliz-
ing modalities such as optical flow and skeletal data,
in contrast to sMRI and fMRI. Collecting sMRI and
fMRI data from patients with ASD is challenging,
as discussed earlier in this section. Our study uses
an ensemble framework, a spatial transformer to en-
capsulate the local relationships between the body
connections, while a temporal transformer encodes
global interconnections across multiple frames. Also,
we utilized the Temporal Similarity Matrix (TSM),
which represents sequential data in a graph format.
TSMs excel in the analysis of human movement be-
cause they are resilient to perspective alterations and
have strong generalization skills (Sun et al., 2015).
In our study, similarity is computed between two
skeletal sequences, comparing the interacting child
and the therapist. The proposed method is designed
to be identity-agnostic while retaining essential body
movement features necessary for motion analysis and
understanding.
The structure of this paper is organized as follows:
a brief review of related work in this field is provided
in the next section. Section (III) discusses the dataset
used in the study, and Section (IV) outlines the pro-
posed architecture. Section (V) presents the discus-
sion and future work, and Section (VI) presents the
conclusions drawn from the proposed approach.
2 RELATED WORK
Currently, three reliable and standardized instruments
are commonly employed for autism diagnosis: the
Autism Diagnostic Observation Schedule (ADOS)
(Lord et al., 2000), the Autism Diagnostic Interview-
Revised (ADI-R) (Le Couteur et al., 1989), and the
Diagnostic and Statistical Manual of Mental Dis-
orders, Fifth Edition (DSM-5) (American Psychi-
atric Association et al., 2013). While effective, these
tools require considerable time for administration and
score interpretation, causing delays in early interven-
tion.
As a potential solution, machine learning tech-
niques have been applied to develop classification
models using rs-fMRI data. For example, a support
vector classifier (SVC) was employed by (Abraham
et al., 2017), achieving an accuracy of 67%. Similarly,
(Mont
´
e-Rubio et al., 2018) utilized an SVC on the rs-
fMRI dataset, attaining an accuracy of 62%. Over the
past decade, advanced techniques such as deep neu-
ral networks (DNNs), long-short-term memory net-
works (LSTMs), and spatial-temporal graph trans-
formers have gained traction in diagnosing ASD us-
ing rs-fMRI data. For example, (Sherkatghanad et al.,
2020) developed a CNN-based classifier, achieving an
accuracy of 70.22%. Furthermore, (Deng et al., 2022)
proposed a linear spatial-temporal attention model to
extract spatial and temporal representations to differ-
entiate ASD subjects from typical controls using rs-
fMRI data. However, these methods faced challenges
in effectively extracting critical features from com-
Multi-Modal Framework for Autism Severity Assessment Using Spatio-Temporal Graph Transformers
687

plex fMRI images, which limited their performance.
Additionally, as discussed earlier, there are inherent
difficulties associated with acquiring MRI scans.
Researchers have recently used movement syn-
chrony methods to develop models for diagnosing
Autism Spectrum Disorder. These methods are cate-
gorized into statistical approaches, which rely on low-
level pixel features, and deep learning approaches,
which extract high-level semantic information from
video frames. Statistical methods (Altmann et al.,
2021);(Tarr et al., 2018) have lately been widely used
to facilitate the assessment of movement synchro-
nization. It translates the raw video recordings of
intervention into pixel-level presentations that cap-
ture temporal dynamics. The ultimate synchroniza-
tion score is then calculated based on the correla-
tion between the pixel sequences of different par-
ticipants. However, these statistical methods are
highly susceptible to noise, as they treat all pixels
equally, which can lead to inaccuracies, especially
in recordings from non-stationary cameras with dy-
namic backgrounds. Motion energy-based methods,
among the most widely used statistical techniques
(Altmann et al., 2021); (Tarr et al., 2018), require a
predefined and fixed region of interest (ROI) and are
limited in effectiveness if participants move outside
this ROI. Moreover, these methods overlook the topo-
logical relationships among different human body
parts. These limitations have led to poor performance
and a lack of scalability for statistical methods when
applied in specific contexts.
In contrast, deep learning methods have recently
gained prominence for addressing the limitations
of statistical approaches, showing enhanced perfor-
mance in tasks related to human activity recognition
(Dwibedi et al., 2020); (Zheng et al., 2021). Deep
learning methods can leverage semantic information
more effectively than statistical techniques, largely
due to their capabilities of extracting characteristic
features. (Calabr
`
o et al., 2021) used a convolutional
autoencoder to reconstruct inter-beat interval (IBI)
segments from electrocardiogram (ECG) data. Their
study focused on interactions between children with
ASD and their counselors. A multi-task framework
was introduced by (Li et al., 2021) to combine mo-
tion synchronization estimation with secondary tasks,
such as interventional activity detection and action
quality assessment (AQA). Nevertheless, both stud-
ies (Calabr
`
o et al., 2021); (Li et al., 2021) required
access to the raw video footage, limiting their ability
to protect privacy.
However, our approach utilizes the MMASD
dataset (Li et al., 2023), a privacy-focused dataset
that derives skeletal (2D and 3D) and optical flow
data from intervention videos. For processing these
modalities, an ensemble network is proposed, em-
ploying the ST-GCN (Yan et al., 2018) to extract
spatial and temporal features from the skeleton data
of interacting individuals in the sequence of frames.
Furthermore, it derives the features that represent
the topological associations between the body joints,
which helps the model to understand the body pos-
ture better. Additionally, an I3D (Carreira and Zis-
serman, 2017) model is used to analyze the opti-
cal flow information. The optical flow data in tem-
poral and spatial dimensions enables the model to
capture motion patterns of the interacting individu-
als in the frames over time. This additional infor-
mation improves the model’s ability to understand
therapist and kid motions across frames appropriately.
The proposed framework’s ability to generalize is en-
hanced through the combination of multiple modali-
ties. Scalability can be achieved by incorporating ad-
ditional branches to process new modalities in the fu-
ture. More details about the proposed approach are
provided in section (4).
3 DATASET
The MMASD (Li et al., 2023) dataset includes a co-
hort of 32 children diagnosed with ASD, comprising
27 males and 5 females. Before participation, the
Social Communication Questionnaire (SCQ) (Srini-
vasan et al., 2016) was utilized for initial screening,
with final eligibility established through the ADOS
scores and clinical evaluation. All recruited chil-
dren were between the ages of 5 and 12 years. All
videos were filmed in a domestic setting, where the
video recorder focused on the area where each child
participant engaged in their activities. This dataset
comprises 1,315 video clips sourced from interven-
tion recordings. There were three distinct themes:
(1) Robot: children observed and imitated the move-
ments demonstrated by a robot; (2) Rhythm: chil-
dren and therapists engaged in therapeutic activities
involving singing or playing musical instruments to-
gether; and (3) Yoga: children followed yoga exer-
cises led by therapists, which included activities such
as stretching, twisting, balancing, and similar move-
ments. Based on the specific intervention activity, the
data has been organized into eleven activity classes
under these three primary themes, as outlined in the
Table (1).
Three Key features were extracted from the origi-
nal footage to retain essential movement details.
1. Optical flow: Optical flow refers to the perceived
movement of objects within a scene, created by
HEALTHINF 2025 - 18th International Conference on Health Informatics
688
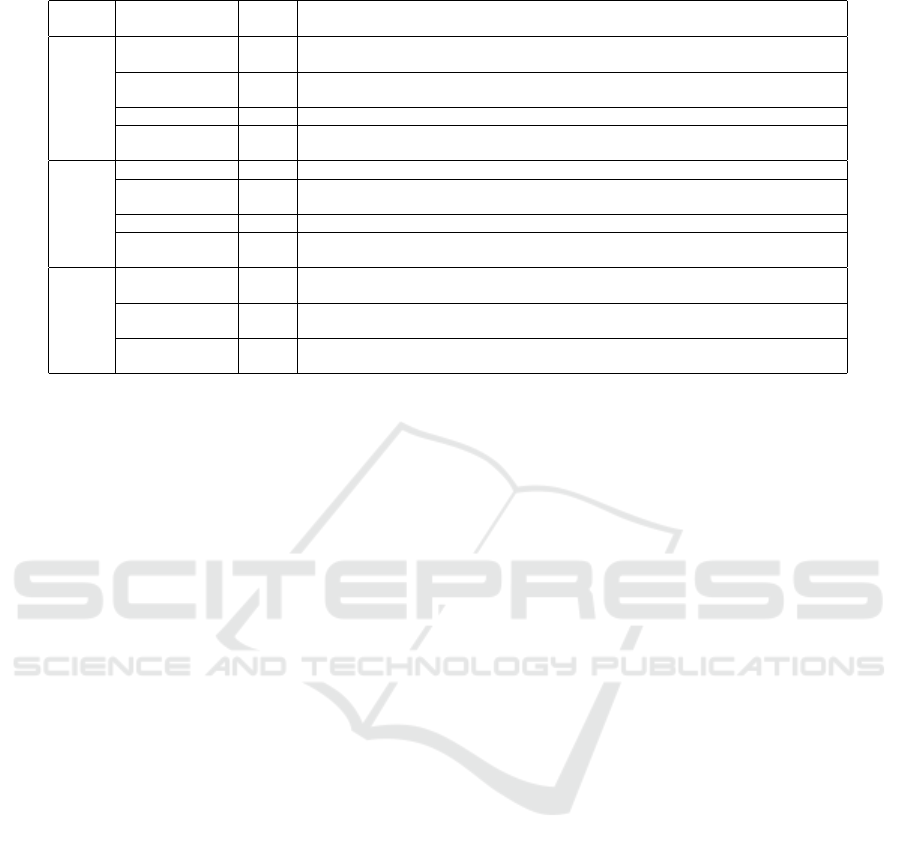
Table 1: An overview of the 11 activity classes in the MMASD dataset (Li et al., 2023).
Theme
Activity
Class
Count Activity Description
Robotic
Arm swing 105
The participant lifts their left and right arms sequentially
while maintaining a standing stance.
Body swing 119
The body swings from left to right, with both hands outstretched, one
hand behind the other.
Chest expansion 114 The participant slowly expanded and contracted the chest.
Squat 101
The participant assumes a crouching position with their knees flexed
and maintains this posture in a repetitive manner.
Music
Drumming 168 The snare or Tubano drum is played by the participant using one or both hands.
Maracas forward
shaking
103
The participant actively shakes maracas, a percussion instrument frequently
used in Caribbean and Latin music.
Maracas shaking 130 The participant moves the maracas side to side in front of their chest.
Sing and clap 113
Seated on the ground, the participant engages in singing and clapping simultaneously,
an activity often performed at the beginning or conclusion of an intervention.
Yoga
Frog pose 113
The participant places their feet such that their big toes meet and
opens their knees as far as possible.
Tree pose 129
The participant assumes a tree pose, balancing on one leg while positioning the sole of
the other foot against the inner thigh, calf, or ankle of the standing leg.
Twist pose 120
Seated with legs crossed, the participant rotates their torso
to one side while maintaining stability in the lower body.
the relative motion between the observer and
the environment. They used the Lucas-Kanade
method (Lucas and Kanade, 1981) to obtain op-
tical flow information, a widely used technique in
computer vision for estimating object movement
between frames. This method assumes minimal,
consistent displacement in image content within a
neighborhood around a given point.
2. 2D skeleton: Skeletal data has significant bene-
fits over raw RGB data since it simply contains
the locations of human body joints on a 2D plane,
and provides context-agnostic information. This
data enables models to focus on robust features of
bodily movements.
In the MMASD dataset, 2D skeletons were ex-
tracted from recorded videos using OpenPose
(Cao et al., 2017). This library detects key hu-
man structural points, including joints and body
components, in real-time from images or video
frames for multiple users simultaneously. Confi-
dence scores for each body component were gen-
erated, followed by association with individual
persons using Part Affinity Fields.
3. 3D skeleton: 3D skeletons represent each key
joint in three-dimensional coordinates, adding a
depth dimension. For extracting 3D skeleton data,
the Regression of Multiple 3D People (ROMP)
method, introduced by (Sun et al., 2021), was ap-
plied, providing depth and pose estimation from
single 2D images. The approach estimates various
differentiable maps from the picture, including a
heatmap for the body center and a map for the
mesh parameters. These maps are used to produce
3D body mesh parameter vectors for each person
via parameter sampling. These vectors are pro-
cessed through the Skinned Multi-Person Linear
Model (SMPL) model to generate multi-person
3D models.
Demographic information and autism assessment
results for all the children were also reported, encom-
passing details such as motor functioning scores, date
of birth, and autism spectrum disorder severity levels
using the ADOS-2 scores. Even though, the MMASD
dataset contains various modalities, including 2D and
3D skeletal data as well as optical flow information,
the relatively limited number of data samples may re-
strict the model’s adaptability in different real-world
scenarios.
4 PROPOSED ARCHITECTURE
Figure (1b) illustrates the structure of the suggested
framework. It comprises four main elements. First
is the Spatial Encoder, which includes the ST-GCN
and a spatial transformer to derive spatial information
between the interacting individual with ASD and the
therapist from each frame refer to Figure (1a). Sec-
ond, is the Temporal Transformer designed to extract
temporal features for the entire sequence. Third is the
I3D model, a flow-stream Inflated 3D ConvNet (I3D)
was employed to process the optical flow data, and
finally, a multi-layer perception (MLP) is the clas-
sification head responsible for predicting the autism
severity score (Hus et al., 2014). This section pro-
vides a brief overview of these main components and
a detailed explanation of the proposed methodology.
Multi-Modal Framework for Autism Severity Assessment Using Spatio-Temporal Graph Transformers
689
(a) The spatial encoder consists of a spatial transformer and two ST-GCN modules
(Yan et al., 2018), individually designed to process the data for both the child and
the therapist.
(b) The top branch ( dashed blue rectangle) processes the skeleton data, and the bottom ( dashed orange rectangle) processes
optical flow.
Figure 1: Illustration of the basic building blocks of the proposed model for autism spectrum disorder (ASD) prediction.
4.1 Spatial Encoder
The spatial encoder as shown in the Figure (1a),
is composed of two primary components: Spatio-
Temporal Graph Convolutional Networks (ST-GCN)
and a spatial transformer. Specifically, two separate
ST-GCNs are employed—one dedicated to process-
ing the child’s skeletal data and the other for handling
the therapist’s data. The skeleton data was generated
by a pose detector, where every joint J
i
is represented
as a 3-D vector (x
i
, y
i
, c
i
). Here, x
i
and y
i
∈ R
2
, as
they denote the coordinates of joint J
i
, and c
i
, ∈ [0,
1], represents the joint confidence values estimated by
the pose detector. For each joint J
i
, a hidden embed-
ding is produced through the ST − GCN
k
where k ∈
to [child, therapist], which then serves as the input to
the spatial transformer.
4.1.1 ST-GCN
ST-GCN models the spatial and temporal structure
of skeleton data by using a graph convolutional net-
work designed for skeleton-based data analysis. Each
skeleton joint is represented as a node, while con-
nections between adjacent joints are represented as
edges. Given a set of vertices V, where each vertex
HEALTHINF 2025 - 18th International Conference on Health Informatics
690

v
i
∈ V represents a specific joint, and edges based
on natural human joint connections, ST-GCN applies
graph convolutions to capture the spatial dependen-
cies between these joints. Mathematically, the feature
map of each vertex v
i
before the convolution can be
represented as f
i
n(v
i
). After applying the ST-GCN
convolution, the output feature map f
o
ut(v
i
) is ob-
tained using:
f
out
(v
i
) =
∑
B∈B(i)
∑
v
i
∈B(i)
1
|
B
|
f
in
(v
j
).w(B(i)) (1)
here B(i) denotes the neighborhood of v
i
, deter-
mined by both human body connections and a pre-
defined partition rule. The function w(B(i)) repre-
sents the weights assigned to each neighborhood, and
|
B
|
is the normalization factor for the neighborhood
size.
4.1.2 Spatial Transformer
To adjust the unique structure of dyadic (child-
therapist) interactions by introducing a spatial trans-
former that generates spatial embeddings, we in-
corporated both the joint’s position and its corre-
spondence across interacting individuals. The spa-
tial transformer combines three main components to
form a spatial feature vector: (1) patch embedding,
(2) spatial positional embedding, and (3) joint index
embedding shared between matching joints in child-
therapist pairs.
The final spatial embedding S is computed by:
S = ST (P + E
pos
+ E
joint
) (2)
where P represents the patch embedding, E
pos
is the
spatial positional embedding that maintains the joint
order, and E
joint
is the joint index embedding, en-
abling the transformer to attend to the corresponding
joints across the child and the therapist in synchrony
assessments.
4.2 Temporal Transformer
The Temporal Transformer captures the temporal re-
lationships across frames, enhancing the model’s abil-
ity to assess movement synchrony. It applies attention
to the sequential frames and includes a temporal sim-
ilarity matrix (TSM), which captures periodic move-
ments inherent in autism intervention sessions. The
temporal embedding includes: (1) Patch embedding
P
′
, which is the output from the spatial transformer
(2) temporal positional embedding E
′
pos
, which pre-
serves the temporal order of the frames, (3) and frame
uncertainty embedding E
uncertainity
, representing the
confidence score for the frame, calculated from joint
confidence scores. The frame uncertainty embedding
E
uncertainity
for a specific frame t is computed by:
E
uncertainity
= Linear(c
1
1
, c
2
1
.., c
25
1
;c
1
2
, c
2
2
.., c
25
2
) (3)
where each c
i
represents the confidence score of a
joint. To account for the periodic nature of therapeu-
tic interventions, a temporal self-similarity matrix S
(Dwibedi et al., 2020) is integrated into the computa-
tion of temporal attention. S is represented as a square
matrix M
2
, where M denotes the number of frames is
sequence. Each element M[i][ j] represents the resem-
blance between the pose X
i
1
from the first individual
at timestamp i and the pose X
j
2
from the second indi-
vidual at timestamp j.
Rather than calculating similarity directly from
coordinates ((x
i
, y
i
)), the computation is based on cor-
responding d-dimensional feature vectors f
i
d1
and f
j
d2
,
produced by the ST-GCN. The similarity function is
formulated by calculating the Euclidean distance be-
tween these feature vectors. subsequently, a softmax
operation is applied along the time axis. The tempo-
ral similarity matrix M defined between correspond-
ing feature vectors of child and therapist frames:
M[i, j] =
−1
d
v
u
u
t
d
∑
m=1
f
i
1
[m] − f
j
2
[m]
2
(4)
here, M is processed through a convolutional layer to
produce a feature map
ˆ
M, which is subsequently in-
cluded in the computation of temporal attention.
4.3 I3D
A common approach to understanding human activi-
ties in videos is to utilize 3D convolutional neural net-
works, which apply the convolutional operation over
the spatiotemporal sequence of frames. These frames
represent the motion information between consecu-
tive video frames. In our approach to processing op-
tical flow data, our model is based on the optical flow
stream of the Inflated 3D ConvNet (I3D) (Carreira
and Zisserman, 2017). Additionally, we will employ
the model previously trained on the Kinetics dataset
(Kay et al., 2017). The model employs 3D convo-
lutions to process the optical flow data in temporal
and spatial dimensions, enabling it to capture motion
patterns over time. Solving the optical flow equation
across a window centered on the point effectively cap-
tures the interacting individuals’ motion in image se-
quences. The optical flow stream delivers explicit mo-
tion information of the interacting individuals, assist-
Multi-Modal Framework for Autism Severity Assessment Using Spatio-Temporal Graph Transformers
691

ing the model in comprehending the movement of the
therapist and child across frames.
4.4 MLP
The classification head consists of a Multi-Layer Per-
ceptron (MLP). Given that the autism spectrum has
been structured as a three-class (low, medium, high)
classification problem. The proposed model will be
trained using cross-entropy loss, calculated between
the model prediction score and the corresponding
ADOS-2 score of the sample. The final result would
be a probability score that corresponds to the severity
level of autism.
5 DISCUSSION AND FUTURE
WORK
To validate the model, the provided ADOS-2 scores
will be utilized. The final probability score pro-
vided by the model will be compared to these ref-
erence scores to determine its performance. Future
work could enhance the model by incorporating addi-
tional modalities like 3D Body mesh, further improv-
ing diagnostic accuracy and expanding its usability in
diverse settings. Moreover, a dataset with a larger
number of samples and different activity classes be-
yond those currently available in the MMASD dataset
would greatly enhance the model’s robustness and
adaptability across a range of real-world scenarios.
6 CONCLUSIONS
Gathering sMRI and fMRI data poses major hurdles,
including high operating expenses and the discomfort
experienced by individuals with ASD within the scan-
ner. This discomfort often introduces intrinsic noise
into the data, making it difficult to fully eliminate,
even with extensive pre-processing efforts. Hence, in
our study we propose a multi-modal framework that
combines other modalities like skeletal and optical
flow data for ASD diagnosis, to analyze the move-
ment synchronization between children and thera-
pists. By using the spatio-temporal Graph Convolu-
tion Neural Network (ST-GCN) and spatial-temporal
graph transformers, this model effectively captures
spatial and temporal dynamics essential for ASD in-
tervention assessment. More specifically, the Spatial-
Temporal Graph Convolutional Neural Network (ST-
GCN) leverages the body’s intrinsic connections to
better depict joint topology. Further, the model’s in-
tegration of a temporal similarity matrix improves its
robustness in various therapeutic activities. Addition-
ally, optical flow data is utilized to effectively cap-
ture motion patterns between the child with ASD and
the therapist over time. This supplementary informa-
tion enables the model to more accurately interpret
the movements of both the therapist and child across
frames. Ultimately, the model outputs an autism
severity score, providing valuable insights for thera-
pists to take further action. Although the MMASD
dataset includes different modalities, such as 2D and
3D skeletal data and optical flow information, the
number of data samples is relatively small, which may
limit the model’s adaptability in various real-world
circumstances.
REFERENCES
Abraham, A., Milham, M. P., Di Martino, A., Craddock,
R. C., Samaras, D., Thirion, B., and Varoquaux, G.
(2017). Deriving reproducible biomarkers from multi-
site resting-state data: An Autism-based example.
NeuroImage, 147:736–745.
Altmann, U., Br
¨
ummel, M., Meier, J., and Strauss, B.
(2021). Movement synchrony and facial synchrony as
diagnostic features of depression: A pilot study. The
Journal of nervous and mental disease, 209(2):128–
136.
American Psychiatric Association, D., American Psychi-
atric Association, D., et al. (2013). Diagnostic and
statistical manual of mental disorders: DSM-5, vol-
ume 5. American psychiatric association Washington,
DC.
Calabr
`
o, G., Bizzego, A., Cainelli, S., Furlanello, C., and
Venuti, P. (2021). M-ms: A multi-modal synchrony
dataset to explore dyadic interaction in ASD. Pro-
gresses in Artificial Intelligence and Neural Systems,
pages 543–553.
Cao, Z., Simon, T., Wei, S.-E., and Sheikh, Y. (2017). Real-
time multi-person 2D pose estimation using part affin-
ity fields. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 7291–
7299.
Carreira, J. and Zisserman, A. (2017). Quo vadis, action
recognition? a new model and the kinetics dataset.
In proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 6299–6308.
Deng, X., Zhang, J., Liu, R., and Liu, K. (2022). Classi-
fying ASD based on time-series fMRI using spatial-
temporal transformer. Comput. Biol. Med., 151(Pt
B):106320.
Dwibedi, D., Aytar, Y., Tompson, J., Sermanet, P., and Zis-
serman, A. (2020). Counting out time: Class agnostic
video repetition counting in the wild. In Proceedings
of the IEEE/CVF conference on computer vision and
pattern recognition, pages 10387–10396.
HEALTHINF 2025 - 18th International Conference on Health Informatics
692

Hus, V., Gotham, K., and Lord, C. (2014). Standardizing
ADOS domain scores: separating severity of social af-
fect and restricted and repetitive behaviors. J. Autism
Dev. Disord., 44(10):2400–2412.
Kay, W., Carreira, J., Simonyan, K., Zhang, B., Hillier, C.,
Vijayanarasimhan, S., Viola, F., Green, T., Back, T.,
Natsev, P., et al. (2017). The kinetics human action
video dataset. arXiv preprint arXiv:1705.06950.
Le Couteur, A., Rutter, M., Lord, C., Rios, P., Robertson, S.,
Holdgrafer, M., and McLennan, J. (1989). Autism di-
agnostic interview: a standardized investigator-based
instrument. J. Autism Dev. Disord., 19(3):363–387.
Li, J., Bhat, A., and Barmaki, R. (2021). Improving the
movement synchrony estimation with action quality
assessment in children play therapy. In Proceedings
of the 2021 International Conference on Multimodal
Interaction, pages 397–406.
Li, J., Chheang, V., Kullu, P., Brignac, E., Guo, Z., Bhat, A.,
Barner, K. E., and Barmaki, R. L. (2023). MMASD: A
Multimodal Dataset for Autism Intervention Analysis.
In Proceedings of the 25th International Conference
on Multimodal Interaction, ICMI ’23, page 397–405,
New York, NY, USA. Association for Computing Ma-
chinery.
Lord, C., Risi, S., Lambrecht, L., Cook, E. H., Leventhal,
B. L., DiLavore, P. C., Pickles, A., and Rutter, M.
(2000). The Autism Diagnostic Observation Sched-
ule—Generic: A standard measure of social and com-
munication deficits associated with the spectrum of
autism. Journal of autism and developmental disor-
ders, 30:205–223.
Lucas, B. D. and Kanade, T. (1981). An iterative image
registration technique with an application to stereo vi-
sion. In IJCAI’81: 7th international joint conference
on Artificial intelligence, volume 2, pages 674–679.
Lyall, K., Croen, L., Daniels, J., Fallin, M. D., Ladd-Acosta,
C., Lee, B. K., Park, B. Y., Snyder, N. W., Schendel,
D., Volk, H., et al. (2017). The changing epidemiol-
ogy of autism spectrum disorders. Annual review of
public health, 38(1):81–102.
Mont
´
e-Rubio, G. C., Falc
´
on, C., Pomarol-Clotet, E., and
Ashburner, J. (2018). A comparison of various MRI
feature types for characterizing whole brain anatomi-
cal differences using linear pattern recognition meth-
ods. Neuroimage, 178:753–768.
Nagaoka, C. and Komori, M. (2008). Body movement
synchrony in psychotherapeutic counseling: A study
using the video-based quantification method. IEICE
transactions on information and systems, 91(6):1634–
1640.
Nickl-Jockschat, T., Habel, U., Maria Michel, T., Manning,
J., Laird, A. R., Fox, P. T., Schneider, F., and Eick-
hoff, S. B. (2012). Brain structure anomalies in autism
spectrum disorder—a meta-analysis of VBM studies
using anatomic likelihood estimation. Human Brain
Mapping, 33(6):1470–1489.
Santana, C. P., de Carvalho, E. A., Rodrigues, I. D., Bastos,
G. S., de Souza, A. D., and de Brito, L. L. (2022). rs-
fMRI and machine learning for ASD diagnosis: a sys-
tematic review and meta-analysis. Scientific Reports,
12(1):6030.
Sherkatghanad, Z., Akhondzadeh, M., Salari, S., Zomorodi-
Moghadam, M., Abdar, M., Acharya, U. R., Khos-
rowabadi, R., and Salari, V. (2020). Automated detec-
tion of autism spectrum disorder using a convolutional
neural network. Frontiers in neuroscience, 13:1325.
Srinivasan, S. M., Eigsti, I.-M., Neelly, L., and Bhat, A. N.
(2016). The effects of embodied rhythm and robotic
interventions on the spontaneous and responsive so-
cial attention patterns of children with autism spec-
trum disorder (ASD): A pilot randomized controlled
trial. Research in autism spectrum disorders, 27:54–
72.
Sun, C., Junejo, I. N., Tappen, M., and Foroosh, H. (2015).
Exploring sparseness and self-similarity for action
recognition. IEEE Transactions on Image Processing,
24(8):2488–2501.
Sun, Y., Bao, Q., Liu, W., Fu, Y., Black, M. J., and Mei, T.
(2021). Monocular, one-stage, regression of multiple
3D people. In Proceedings of the IEEE/CVF interna-
tional conference on computer vision, pages 11179–
11188.
Tarr, B., Slater, M., and Cohen, E. (2018). Synchrony and
social connection in immersive virtual reality. Scien-
tific reports, 8(1):3693.
Yan, S., Xiong, Y., and Lin, D. (2018). Spatial temporal
graph convolutional networks for skeleton-based ac-
tion recognition. In Proceedings of the AAAI confer-
ence on artificial intelligence, volume 32.
Zheng, C., Zhu, S., Mendieta, M., Yang, T., Chen, C., and
Ding, Z. (2021). 3D human pose estimation with spa-
tial and temporal transformers. In Proceedings of the
IEEE/CVF international conference on computer vi-
sion, pages 11656–11665.
Multi-Modal Framework for Autism Severity Assessment Using Spatio-Temporal Graph Transformers
693
