
Spiralling Human-Inspired Exploration Algorithm with Doorway
Detection
Rasmus Borrisholt Schmidt, Andreas Sebastian Sørensen, Thor Beregaard and Michele Albano
a
Dept. of Computer Science, Aalborg Universitet, 9220 Aalborg Øst, Denmark
Keywords:
Minotaur, TNF, Online Exploration, Signal Degradation.
Abstract:
Exploration of unknown environments is an important task for autonomous robot swarm systems. The faster
they can fully explore an area, the faster a coordinated plan can be made, or points of interest found, to support
further tasks. Previous algorithms have often focused either on frontier based, or nature-inspired heuristics.
We present a human-inspired exploration algorithm, Minotaur, that enables simple and efficient exploration
of buildings. We studied how Minotaur and a state-of-the-art algorithm, namely The Next Frontier (TNF),
perform. Minotaur follows walls to discover doorways, after which it coordinates with robots in the same room
to extend the exploration to rooms accessible through the discovered doorways. Most algorithms assume either
perfect communication, or line-of-sight (LOS) communication, which hinders the realism of the simulation
results. We then modified an existing simulator to take into account realistic communication technologies that
have limited penetration of materials through walls. Comparative experiments between Minotaur, TNF, and a
simple greedy algorithm show the superiority of Minotaur when multiple robots are exploring buildings-like
maps. However, when considering cave-like maps, Minotaur appears to have bad performance, but the greedy
algorithm outperforms TNF, particularly when the algorithms are limited in their communication capabilities.
1 INTRODUCTION
Robot exploration is a common problem in swarm
robotics, with applications in search & rescue, fire-
fighting, emergency response, and space and undersea
exploration (Queralta et al., 2020). Many exploration
algorithms have been proposed, some inspired by an-
imals (Nicola et al., 2018; Gul et al., 2021; Gul et al.,
2023b; Gul et al., 2023a), some using frontier explo-
ration (Burgard et al., 2005; Bautin et al., 2012; Co-
lares and Chaimowicz, 2016), and some using various
mathematical concepts (Mirjalili, 2016; Kennedy and
Eberhart, 1995).
This paper proposes Minotaur, a human-inspired
exploration algorithm. Each robot explores along the
nearest wall, at a little less than their maximum vi-
sion range, detecting doorways on the way. If there
are multiple robots in the current room, half of the
robots will enter the discovered doorway, and explore
from there, spreading throughout the map. When
an explored area is seen, robots follow the explored
area similarly to the initial wall-following strategy.
From time to time, robots communicate their maps
a
https://orcid.org/0000-0002-3777-9981
and marked doorways to limit redundant movements.
Inter-robot communication is useful to share the
Simultaneous Localization and Mapping (SLAM)
maps that the robots are building during exploration
and robots current paths, and in general to strategize
further exploration tasks. Most simulation solutions
assume perfect communication between robots. This
paper lays foundation for more realistic simulation
by implementing a novel communication mechanism
that takes into consideration signal loss through ma-
terials in an existing simulator, and uses it to analyze
the performance of Minotaur against a state-of-the-
art exploration algorithm, namely The Next Frontier
(TNF) (Colares and Chaimowicz, 2016) algorithm.
The rest of this paper describes related works,
namely simulators and exploration algorithms (Sec-
tion 2), presents our proposed algorithm (Section 3)
and discusses its implementation and the mechanisms
used to implement realistic communication
1
( Sec-
tion 4). Experimental results are described in Sec-
tion 5, followed by our conclusions on the topic at
hand and suggestions for future work (Section 6).
1
The developed code is released as open-source on
https://github.com/DEIS-Tools/MAES. A demo video can
be seen on https://youtu.be/gjnVm46Ezd0.
112
Schmidt, R. B., Sørensen, A. S., Beregaard, T. and Albano, M.
Spiralling Human-Inspired Exploration Algorithm with Doorway Detection.
DOI: 10.5220/0013237700003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 112-122
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

2 RELATED WORK
This section discusses simulators for exploration al-
gorithms, and describes existing exploration algo-
rithms relevant for this work.
2.1 Exploration Simulators
When simulating robots, realism is paid in terms of
complexity and performance. In fact, on the one
hand many works used simple simulators that con-
sider robots moving on a grid, disregard collisions,
and allow for unrestrained communication (see for
example (Cheraghi et al., 2020; ?)). On the other
side of the spectrum there are high fidelity simulators
that are very complex to set up and have bad perfor-
mance (Pitonakova et al., 2018).
We opted for Multi Agent Exploration Simulator
(MAES) (Andreasen et al., 2023), which provides a
trade-off between realism and ease of usage. MAES is
open source, it was used to compare exploration algo-
rithms (Andreasen. et al., 2022) and provides the code
to simulate them. Further, MAES supports the cre-
ation of transmission models dependent on distance
and walls passed through, such as attenuation based
models, and can generate maps that represent either
cave-like or building-like environments.
2.2 The next Frontier (TNF)
TNF (Colares and Chaimowicz, 2016) is an explo-
ration algorithm designed to use information gain and
distance cost as a basis for autonomous swarm explo-
ration. TNF uses the Near-Frontier Exploration (?),
which identifies frontiers in the map, which are loca-
tions that are in-between explored and non-explored
areas. In the fitness function that decides robots’ way-
points, TNF considers the information gain that going
to a given area would provide and the cost to get there.
Moreover, each robot stores the newest destina-
tion received from each other robot. When the robot
decides upon the next frontier to explore, a wavefront
will be created from each stored destination, reduc-
ing the score of each frontier near it. This means that
frontiers close to the target frontiers of other robots
will be lower in the score, causing the robots to spread
out more in the map, exploring more disparate sec-
tions and reducing redundant work, speeding up the
exploration.
2.3 Spiraling and Selective
Backtracking (SSB)
SSB (Gautam et al., 2018) is a coverage algorithm
that uses spiraling patterns and expects global com-
munication and discrete grid-based movement. The
robot spirals through known areas and updates other
robots of the covered space and the nearby uncovered
tiles it reserves for backtracking.
The backtracking is used to find new uncovered
areas, and it uses an auction mechanism to decide
which robot should go to each backtracking point. If
no backtracking point is available, or if the robot did
not win any auction for a backtracking point, an auc-
tion is instead done for the nearest unvisited point. As
the robot spirals and creates backtracking points, it re-
serves the points of the spiral and backtracking, and
broadcasts them to other robots, limiting their move-
ment in an attempt to reduce redundant movement.
Our proposed solution uses concepts from SSB,
while improving it in terms of robots’ coordination
and resilience to communication impairments.
2.4 Human Heuristics
Most previous algorithms are generally focused on
mathematical formulas, or get inspired by animal be-
havior. An alternative approach is to explore in a way
that makes sense to humans.
Human heuristics are used in various tasks in
robotics (?; ?). An example of human heuristics used
for exploration is in (Liu et al., 2023), where the au-
thors utilize computer vision with human heuristics to
detect where doors are to separate rooms apart. Fur-
thermore, it prioritizes finishing exploring the current
room before proceeding to the next one.
3 THE MINOTAUR
EXPLORATION ALGORITHM
The general idea behind our proposed exploration al-
gorithm is to use two human-inspired heuristics: (i)
robots will spiral inside a room to explore it; (ii) when
a robot identifies a door in a room, half of the robots
in the room will move out through the door to cover
as many rooms as possible. Part of this approach is
inspired by SSB (Gautam et al., 2018), particularly
the spiraling movement and the auction mechanism
to decide which robot goes to important locations, in
our case doors.
To explain the algorithm, we will initially go over
a constrained version for one single robot, then ex-
pand it to show the full multi robot behavior, with
Spiralling Human-Inspired Exploration Algorithm with Doorway Detection
113

smaller black-box around doorways functionalities
that are then described in their own sections, all to-
gether creating the full algorithm.
3.1 Single Robot
In the single robot algorithm, whose pseudocode is
shown in Alg. 1, the robot starts by exploring along
the wall nearest to its initial location, moving in a
straight direction looking for a wall if it cannot see
any. After this, the robot follows the wall, identifying
(see Section 3.3) and marking the doorways it finds
without entering them until current room is fully ex-
plored.
After covering all walls in a room, it will explore
the center of the room in a spiral pattern, until the
whole room is explored. After that, the robot will
enter the nearest unexplored doorway in the room,
and continue the exploration from there, returning to
unexplored doorways in previous rooms if no unex-
plored door can be found in the new room.
Data: Maximum range of robot sensors
while No walls or explored areas are in range do
Move forward ;
end
while Map is not explored do
while Unexplored area is reachable without
passing doorways do
if Doorway found (Alg. 3) then
Store the doorways, stay in the room
and continue exploring along
nearest wall ;
end
if Wall or explored area in visual range
&& unexplored area ahead then
Follow wall or explored area at max
visual range counter-clockwise ;
else
Go to the nearest unexplored area
without passing a doorway ;
end
end
if Unexplored doorway accessible without
passing other doorways then
Move through the nearest unexplored
doorway within room ;
else
Move through the nearest unexplored
doorway ;
end
end
Algorithm 1: Minotaur Algorithm (Single Robot) .
Data: Maximum range of robot sensors
while No walls or explored areas are in range do
Each robot moves forward ;
end
while Map not explored do
Each robot broadcasts map, including walls,
explored area, doorways and known robots
location ;
For half of robots in current room spin ←
counter-clockwise, for the rest spin ←
clockwise ;
while Unexplored area is reachable without
passing doorways do
if Doorway found (Alg. 3) then
Store & handle doorway (Alg.4) ;
end
if Wall or explored area in visual range
&& unexplored area ahead then
Follow wall or explored area at max
visual range in spin direction ;
else
Go to the nearest unexplored area
without passing a doorway ;
end
end
if Unexplored doorway accessible without
passing other doorways then
Move through the nearest unexplored
doorway within room ;
else
Move through the nearest unexplored
doorway ;
end
end
Algorithm 2: Minotaur Algorithm.
3.2 Multiple Robots
In the strategy for multiple robots, see Alg. 2, half of
the robots explore around the rooms in one direction,
the rest proceed in the other direction, to identify all
doorways quickly.
As they move, the robots broadcast their SLAM
map and any found doorways for other robots to add
to their own maps. On finding a doorway, the robot
starts an auction with all the robots in the same room,
which respond with a bid equal to their distance to
that doorway, so long as they can get there without
passing another doorway, i.e. they are in the same
room. This ensures that no robot spends time mov-
ing to a doorway far away, and that all room that have
started being explored also get finished. This is fur-
ther described in Section 3.4.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
114
3.3 Doorway Detection
When a robot has one or multiple walls in their line of
sight, it will check if it is possible that it discovered a
door, with a set of conditions that are different for one
or multiple walls, as described in Alg. 3.
If there is a single wall, then when the robot finds
a gap in the wall, it will continue along the wall as far
as the door width parameter, and mark the gap as a
door if it finds the continuation of the wall. In Fig. 1,
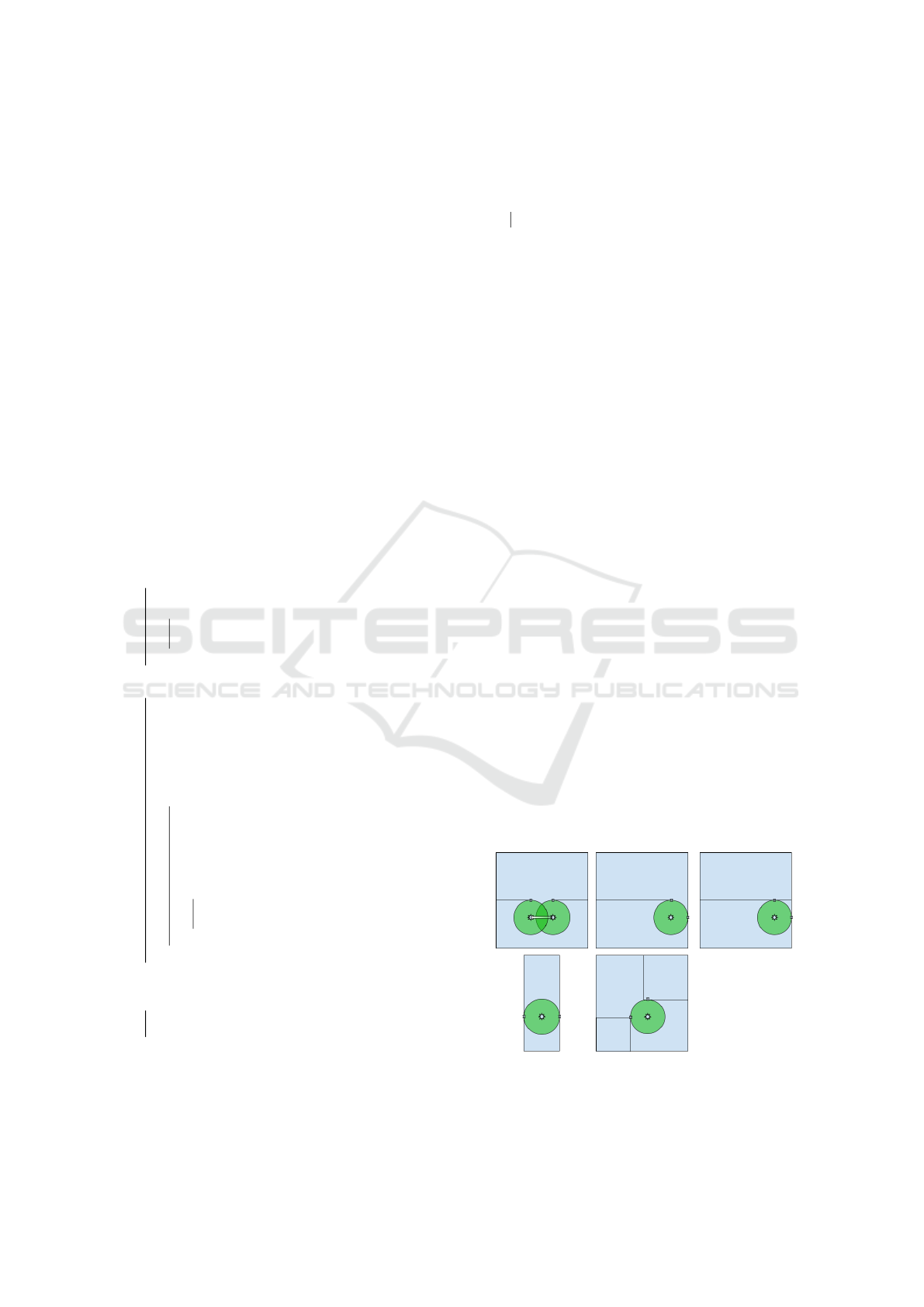
in the first case there is a door in the middle of a wall;
in the second one the door is located in the room’s
corner; in the third case there is no door in a corner;
the fourth case represents a hallway, i.e. the distance
between the interruptions of the wall is larger than the
maximum door width.
If there are multiple walls, then the robot will cre-
ate intersection points between the walls as infinite
lines. If these intersection points have been seen, are
non-solid, and close enough to make a doorway, then
it is a door (last case in Fig. 1).
Data: Maximum range of robot sensors
Data: Maximum width of doors
if Wall ends/stops then
move forward doorway width ;
if Wall continues after doorway width then
Mark doorway and direction it is seen
from ;
end
end
if Two walls in vision area then
Store the wall points;
Continue vision range forward;
Store the new wall points;
Create lines along wall direction between the
points;
if Lines intersect && distance between wall
points greater than robot size then
Find intersection point of lines;
Move towards intersection point until it is
explored;
Create line segments between wall points
and intersection point;
if Ensemble of line segments is open then
Mark doorway and direction doorway
it is seen from;
end
end
end
if any doorways ”seen” from both sides or
doorway was passed through then
Mark doorway as explored;
end
Algorithm 3: Doorway detection, as function of door max-
imum width.
Communicate doorway location to all robots
(comprising itself);
if Receiving robot can reach the doorway on the
same side without passing any doorway then
Receiving robots give ACK and distance;
end
out ← half of received ACK (rounded down);
Command the out robots to exit the doorway;
The rest of the robots will stay in the room ;
Algorithm 4: Doorway auction.
3.4 Doorway Auction
When a robot, let us call it Alice, finds a door, it starts
an auction by sending out a ”doorway found” mes-
sage. When a robot in communication range receives
the message, comprising Alice, if it is able to reach
that door without passing through another doorway,
i.e. it is in the same room, it will respond with an
ACK and a bid equal to its distance to that door. Al-
ice too will respond to the auction with an ACK and
its own bid. Afterward, Alice tells to the half of the re-
spondents having the lowest bids to proceed through
that door (Alice will probably be in this set). The rest
of the robots will stay in the room to finalize its ex-
ploration. This is formalized in Alg. 4.
The approach is also visually explained on Fig. 2,
where green areas are unexplored, the colored dots are
robots, and the dashed lines are communication lines,
with their color signifying whether they respond with
an ACK (green) or not (red). On Fig. 2, Pink finds a
door and communicates to the other robots in range.
Cyan will be able to go to the room. Yellow cannot
get to the door without passing another doorway, and
therefore will not reply with an ACK. While Red tech-
nically can get to the door, it does not know this, as the
area in-between is unexplored. From its perspective,
it would have to backtrack through multiple doorways
to reach Pink, and so it will not reply with an ACK.
Figure 1: Base cases for the doorways.
Spiralling Human-Inspired Exploration Algorithm with Doorway Detection
115

Figure 2: Communication scenario for Alg. 4.
3.5 Greed Algorithm
When the Minotaur has no nearby unseen areas, or
unexplored doorways to go through, it will move to
the nearest unexplored tile anywhere on the map and
continue exploration from there.
This feature has been extracted into its own al-
gorithm, creating a greedy algorithm called Greed,
which always moves to the nearest unexplored tile,
and still communicates and shares its map with other
robots.
Compared to Minotaur, Greed has the advantage
of being simpler and not needing to follow walls. On
the other hand, Minotaur can better divide the robots
between the rooms when it identifies doors.
4 DESIGN & IMPLEMENTATION
This section describes the support for realistic com-
munication through walls in the selected simulator
(MAES (Andreasen. et al., 2022)), and the spiral-
ing and doorway detection mechanisms in Minotaur,
since its implementation was surprisingly more com-
plex than expected.
4.1 Materials in MAES
The MAES simulator allowed to simulate either
global (unrestrained) and line-of-sight (LOS) only
communication between robots. However, we
deemed both of them to be not realistic enough and
we decided to add to each section of the walls a Ma-
terial property, and then use it to check if two robots
are able to communicate with each other at a given
time.
The physics of this problem has already been well
studied, and multiple signal attenuation tables can be
found for various materials at various frequencies, see
for example (Ikpehai et al., 2019; Rappaport, 1996;
?).
Signal loss can be described using the general
path-loss algorithm, see for example Eq. 1, where α,
β, and γ are empirically found ”magic” numbers that
describe how much the signal is degraded for line of
sight and non line of sight communication (?).
L
b
(d, f ) = 10αlog
10
(d) + β + 10γ log
10
( f ) (1)
In terms of implementation, we modified the mesh
generation used to generate a map to add a Material
property, which contains the α, β, and γ from Eq. 1, to
each triangular section that makes up a wall in MAES.
In terms of the Unity Engine, this was done using sub-
meshes, which are subsets of a larger mesh and can
contain separate materials, textures and animations.
This was preferable in comparison to splitting the dif-
ferent meshes into separate game objects for perfor-
mance sake, as it allows for the Unity renderer to per-
form draw call batching more efficiently.
Whenever MAES checks if two robots are able to
communicate, it now draws a line between the robots,
it splits it into segments each time the material be-
tween the robots change, and it calls a function with
a list of tuples (Material, length), with one element in
the list for each segment. The function will then ap-
ply Eq. 1 for each element in the list to compute how
much the signal was attenuated. Equation 2 formal-
izes this process, where S
i
is true when the transmis-
sion can get received successfully for robot i, R
i
is the
receiver sensitivity of robot i, T
j
is the transmission
strength of robot j, m is the number of walls (or open
spaces) that have been crossed with a message, and
A
n, f
are the attenuation values.
S
i
= R
i
≤ (T
j
−
m
∑
n=1
A
n, f
) (2)
The attenuation values for the different materials
used in a map can be provided by the end user as a
part of the configuration along with the transmission
strength, frequency of the signal, and receiver sensi-
tivity of the robots. MAES provides the default val-
ues in Table 1 and, if the end user does not specify
their own, the transmission strength is set to 15 dBm,
the receiver sensitivity is set to -82 dBm, and the fre-
quency is set to 2.4 GHz. These values were chosen in
accordance to 802.11ax also known as Wi-Fi 6 (IEEE,
2021).
4.2 Spiraling Implementation
This subsection focuses on the spiraling strategies that
the robots follow while exploring a room. The imple-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
116
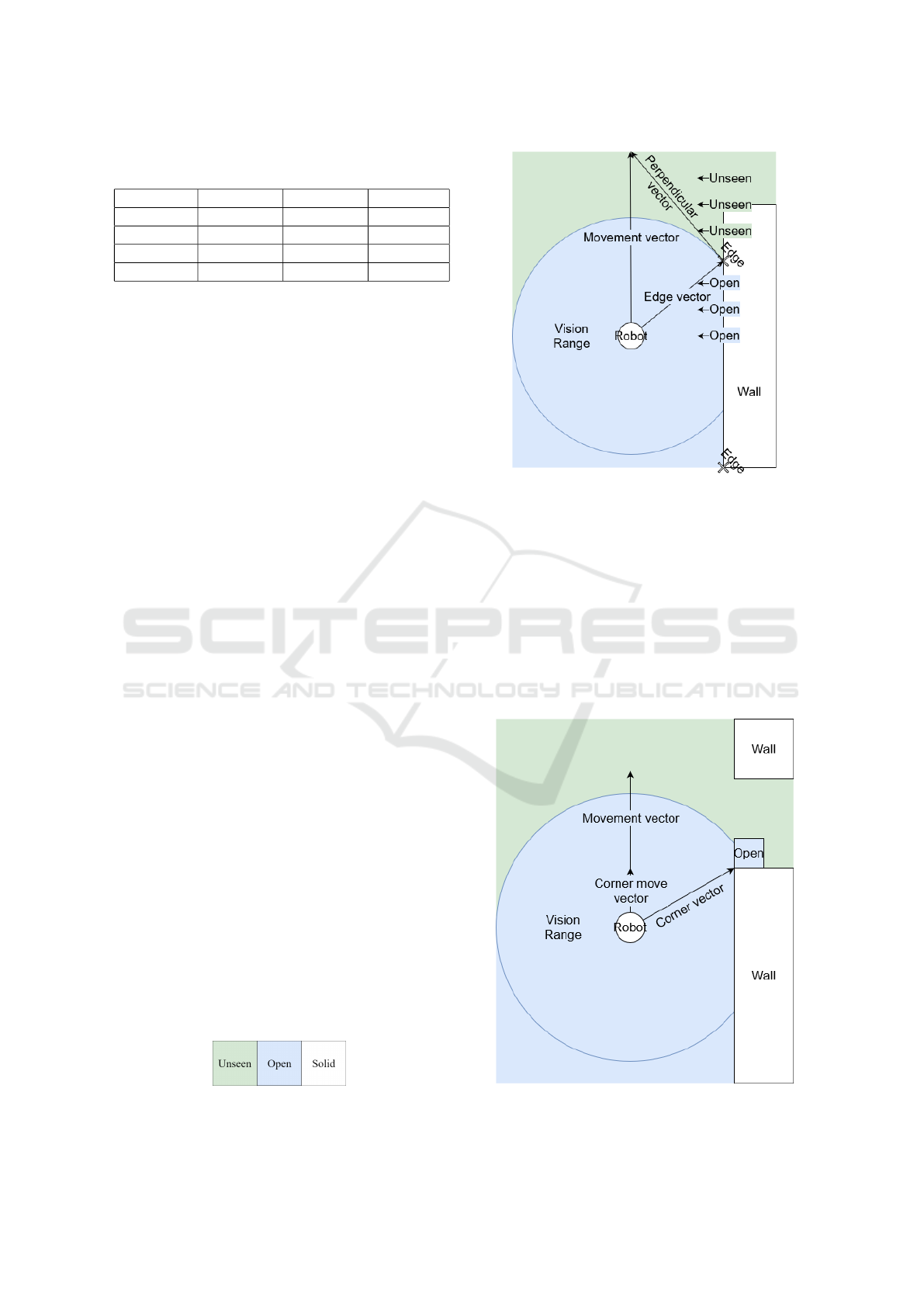
Table 1: Default values for signal attenuation at different
frequencies and materials (Ikpehai et al., 2019).
Frequency 1300 MHz 2400 MHz 5200MHz
Air 0 dB 0 dB 0 dB
Concrete 13 dB 15 dB 23 dB
Wood 5.1 dB 6.7 dB 14 dB
Brick 4.5 dB 5.5 dB 15 dB
mentation of spiraling relies on the overlaid grids on
the SLAM map that the robot creates while navigat-
ing. Each tile on this grid can have one of three states,
Open, Unseen and Solid, as can be seen in Fig. 3.
While following the wall on the initial exploration
of a room, a robot looks for solid tiles within its vi-
sion range. The robot decides which wall to follow by
checking if there are any unseen tiles in front of it. If
there are none, the robot is done following that wall.
When the robot has multiple candidate walls, it
prioritizes moving in the same direction that it is al-
ready moving. The robot computes the perpendicu-
lar vector from the furthest points it can see on the
walls, to decide where to move to next, as illustrated
on Fig. 4. If the wall ends or turns away from the
robot without having a doorway, the robot will ini-
tially lose track of it, but then follow it around the
bend. When reaching the end of a confined area, like
a dead-end in a hallway, the robot will return to the
last seen area with unexplored tiles and continue the
spiraling pattern from there.
On completing the first lap around the room, the
robot will start to spiral around the edge of the previ-
ously explored area. This is tricky, since opposite to
walls, edges between explored and unexplored areas
disappear when unexplored area in question gets ex-
plored. Therefore, the robot must use the fact that the
explored area is continuously fed into its SLAM map,
to look ahead beyond its own vision range and follow
the edge there.
If the spiraling movement cannot reach unseen
tiles, the robot will move greedily towards the near-
est unseen tile in the room. When a room is fully
explored, its robots enter the nearest unexplored door-
ways and continue the exploration.
4.3 Doorway Detection Implementation
While the robot is moving to any destination, it checks
for doorways. For a doorway with a single wall, as
Figure 3: Representations of the different tile statuses.
Figure 4: A valid wall due to having an unseen area where
there presumably is a wall with edges and movement vector
based upon those edges.
seen on Fig. 5, the robot sees that the next tile of the
wall is an open tile. When this happens, the robot
will move forward for a distance equal to the doorway
width parameter. The robot will then be standing at
the end of the movement vector and will be able to see
if the wall continues, and if so, creates an intersection
point between the walls. Then it checks if that is a
valid door, according to the parameter maximum door
width.
Figure 5: Doorway detection when seeing a single wall.
Spiralling Human-Inspired Exploration Algorithm with Doorway Detection
117

Figure 6: Doorway detection when seeing multiple walls. The left shows the state on detection of a potential door, and the
right shows the state after moving to check intersection points.
If there are two or more walls, the robot looks for
an intersection point between those, as can be seen
on Fig. 6. When the intersection point is in an un-
seen area, as it is likely to happen, the robot will go
to explore the intersection point. After the robot has
moved to see the point, it takes the closest points to
the intersection from the two walls that created it, as
can be seen on the two edge points on the right state of
Fig. 6. With those two points, the robot checks if they
create a valid doorway, by once again considering the
doorway maximum width parameter.
5 EXPERIMENTS AND RESULTS
In this section, we go through the experimental setup
and the results of our experiments. These experiments
are meant to understand the effect of more realistic
communication on the exploration algorithms, and to
compare the performance of Minotaur with TNF, as
well as Greed (see Section 3.5).
5.1 Experimental Setup
To perform a fair comparison of the algorithms and
the simulation settings, we initialized a random num-
ber generator with the seed 123456, then we gener-
ated 100 random building maps and 100 random cave
maps, we selected random initial locations for the
robots, and later we performed all simulations with
those same initial conditions. An experiment was
considered complete when 98% of the area was ex-
plored. On all the graphs in Section 5.2, we present
the percentage of map that was explored at a given
time, averaged over the 100 maps.
The simulation campaign we performed consid-
ered a map of 50x50, 100x100 or 150x150 tiles, 1,
2, 4, 8 or 16 robots, robots spawned either close to-
gether or at random over the whole map, maps were
either representing caves or buildings (see Section 3.1
in (Andreasen et al., 2023)), the algorithm was ei-
ther TNF, Minotaur or Greed, and the communication
technology had either global coverage, line-of-sight
limitation or we simulated communication through
Table 2: Settings for the exploration scenarios.
Robot random seed 123456
Maps size 50x50, 100x100,
150x150
Number of robots 1, 2, 4, 8, 16
Initial position of robots Close together, random
Map type cave, building
Exploration algorithm TNF, Minotaur, Greed
Communication Global, LOS, materials
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
118
Figure 7: On the left, comparison of communication technology for the Greed algorithm, 16 robots, 150x150 building maps.
On the right, comparison of algorithms for 2 robots in 150x150 tiles building maps.
Figure 8: Comparison of algorithms with 16 robots on building maps (size is 50x50 tiles on the left, 150x150 tiles on the
right).
materials as presented in Section 4.1. Table 2 pro-
vides a summary of the parameters used for the simu-
lation campaign.
5.2 Results
We have compared the performance of the exploration
algorithms when different communication capabili-
ties were considered. In all cases, as expected, per-
formance with LOS limitations was worse than with
global communication, with communication through
materials being in the middle. The performance gap
was more pronounced with larger maps and when
more robots were part of the picture. However, the ef-
fect was always quite limited. The left graph in Fig. 7
shows one of the most pronounced effects, for exper-
iments with the Greed algorithm on large (150x150
tiles) building maps, 16 robots spawned close to each
other. The rest of the results we are presenting will
consider communication through materials.
One of our hypothesis was that Minotaur requires
a sizable number of robots to benefit from its capac-
ity to coordinate its robots efficiently. Results from 2
robots exploration confirmed it, but also hinted that in
large building maps (150x150 tiles) both Greed and
Minotaur outperform TNF, with Greed being slightly
better than Minotaur. The right graph in Fig. 7 shows
one example of this, for 2 robots over 150x150 tiles
building maps.
When many robots are part of the picture, we ex-
pected that Minotaur had an edge over the other algo-
rithms, since it pushes robots to cover the most rooms
as fast as possible. The results confirmed it, even
though the performance of the Greed algorithm was
quite close to Minotaur’s. Fig. 8 reports on a com-
parison of the algorithms using 16 robots on building
maps of different sizes (50x50 tiles vs 150x150 tiles).
Finally, we decided to compare the algorithms on
cave maps. The performance of Minotaur was very
bad with respects to the other algorithms. This is
explainable by the fact that Minotaur depends on its
mechanism to recognize doors as opening on straight
walls. However, cave maps do not have straight walls,
invalidating the benefits of Minotaur, which still suf-
fers from overheads. Fig. 9 reports on a compari-
son of the algorithms on cave maps, with 2 robots on
50x50 tiles maps on the left and 16 robots on 150x150
maps on the right, where TNF outperforms Greed on
Spiralling Human-Inspired Exploration Algorithm with Doorway Detection
119
Figure 9: Comparison of algorithms with on cave maps (2 robots on 50x50 tiles on the left, 16 robots on 150x150 tiles on the
right).
smaller maps with less robots, while Greed takes the
lead on larger maps with more robots.
After the collection of the results, some thoughts
were given to the causes of Minotaur slowdowns, for
example on cave maps; and why on building maps
Greed was often able to compete with Minotaur while
both outperformed TNF. When a corner is encoun-
tered on a map, see Fig. 10, Greed approaches the
corner, then it moves out looking for unexplored area.
Minotaur instead moves closer to the corner and,
when it sees the opposing wall of the corner, needs
to check if there is a doorway. This causes it to move
much closer to the wall than Greed.
A different situation is represented in Fig. 11,
where Greed has a more direct movement through the
door, while Minotaur spends time more to identify it,
and then it decide to disregard the doorway and to
continue the exploration of the room. These wasted
movements all cause slowdown, providing Greed a
relative advantage.
6 CONCLUSIONS AND FUTURE
WORK
This paper presents an efficient exploration algorithm
based on human-inspired heuristics. The algorithm
uses the simple ideas of wall following, fully explor-
ing rooms before leaving, looking for doorways, and
splitting a group of robots as much as possible to con-
tinue the exploration of the current room while still
crossing the newly found doors.
Comparisons have been made with The Next
Frontier (TNF), and a greedy algorithm called Greed.
When maps of buildings are explored, the more robots
are added, the better Minotaur performes compared
to Greed, and both algorithms perform far better than
TNF. In case of maps of caves, Minotaur has bad per-
formance since it loses its capability of door identifi-
Figure 10: Minotaur (top) and Greed (bottom) exploring a
corner without a doorway.
cation while still suffering from the overheads to exe-
cute its mechanisms.
To perform a more realistic comparison, we also
enhanced the simulator MAES to support the associa-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
120

Figure 11: Minotaur (top) and Greed (bottom) exploring a
corner featuring a doorway.
tion of materials to walls, which then are used to com-
pute signal loss for communication between robots.
Future work on the topic can comprise the defi-
nition of an alternative door identification algorithm
that can work also on cave maps.
More far fetched improvements can consider the
extension of the Minotaur algorithm to the 3rd dimen-
sion. This would allow the algorithms to be used with
aerial drones, mapping out far more complex spaces.
This would likely require a different understanding of
the SLAM map.
While algorithms can show promising results in
the MAES simulator, implementing them on real
robots, and testing them on areas created in the real
world, would likely present unique challenges and
different results.
ACKNOWLEDGEMENTS
This work was partially supported by the S4OS Vil-
lum Investigator Grant (37819) from Villum Fonden,
and by the Validation WP of the ERC Advanced Grant
LASSO (Learning, Analysis, SynthesiS and Opti-
mization of Cyber-Physical Systems).
REFERENCES
Andreasen., M. Z., Holler., P. I., Jensen., M. K., and Al-
bano., M. (2022). Comparison of online exploration
and coverage algorithms in continuous space. In
Proceedings of the 14th International Conference on
Agents and Artificial Intelligence - Volume 1: SDMIS,
pages 527–537. INSTICC, SciTePress.
Andreasen, M. Z., Holler, P. I., Jensen, M. K., and Albano,
M. (2023). MAES: a ROS 2-compatible simulation
tool for exploration and coverage algorithms. Artif.
Life Robotics, 28(4):757–770.
Bautin, A., Simonin, O., and Charpillet, F. (2012). Minpos:
A novel frontier allocation algorithm for multi-robot
exploration. In Intelligent Robotics and Applications:
5th International Conference, ICIRA 2012, Montreal,
Canada, October 3-5, 2012, Proceedings, Part II 5,
pages 496–508. Springer.
Burgard, W., Moors, M., Stachniss, C., and Schneider, F.
(2005). Coordinated multi-robot exploration. IEEE
Transactions on Robotics, 21(3):376–386.
Cheraghi, A. R., Abdelgalil, A., and Graffi, K. (2020). Uni-
versal 2-dimensional terrain marking for autonomous
robot swarms. In 2020 5th Asia-Pacific Conference
on Intelligent Robot Systems (ACIRS), pages 24–32.
IEEE.
Colares, R. G. and Chaimowicz, L. (2016). The next fron-
tier: combining information gain and distance cost for
decentralized multi-robot exploration. In Ossowski,
S., editor, Proceedings of the 31st Annual ACM Sym-
posium on Applied Computing, Pisa, Italy, April 4-8,
2016, pages 268–274. ACM.
Gautam, A., Richhariya, A., Shekhawat, V. S., and Mohan,
S. (2018). Experimental evaluation of multi-robot on-
line terrain coverage approach. In 2018 IEEE Interna-
tional Conference on Robotics and Biomimetics (RO-
BIO), pages 1183–1189.
Gul, F., Mir, I., and Mir, S. (2023a). Aquila optimizer with
parallel computing strategy for efficient environment
exploration. Journal of Ambient Intelligence and Hu-
manized Computing, 14(4):4175–4190.
Gul, F., Mir, I., Mir, S., and Abualigah, L. (2023b). Multi-
agent robotics system with whale optimizer as a multi-
objective problem. Journal of Ambient Intelligence
and Humanized Computing, 14(7):9637–9649.
Gul, F., Mir, I., Rahiman, W., and Islam, T. U. (2021). Novel
implementation of multi-robot space exploration uti-
lizing coordinated multi-robot exploration and fre-
quency modified whale optimization algorithm. IEEE
Access, 9:22774–22787.
Spiralling Human-Inspired Exploration Algorithm with Doorway Detection
121

IEEE (2021). Ieee standard for information technology–
telecommunications and information exchange be-
tween systems local and metropolitan area networks.
IEEE Std 802.11ax-2021 (Amendment to IEEE Std
802.11-2020), pages 1–767.
Ikpehai, A., Adebisi, B., Rabie, K. M., Anoh, K.
O. O., Ande, R., Hammoudeh, M., Gacanin, H., and
Mbanaso, U. M. (2019). Low-power wide area net-
work technologies for internet-of-things: A compara-
tive review. IEEE Internet Things J., 6(2):2225–2240.
Kennedy, J. and Eberhart, R. (1995). Particle swarm opti-
mization. In Proceedings of ICNN’95 - International
Conference on Neural Networks, volume 4, pages
1942–1948 vol.4.
Liu, J., Lv, Y., Yuan, Y., Chi, W., Chen, G., and Sun, L.
(2023). An efficient robot exploration method based
on heuristics biased sampling. IEEE Transactions on
Industrial Electronics, 70(7):7102–7112.
Mirjalili, S. (2016). Sca: a sine cosine algorithm for solving
optimization problems. Knowledge-based systems,
96:120–133.
Nicola, G., Pedrocchi, N., Mutti, S., Magnoni, P., and
Beschi, M. (2018). Optimal task positioning in multi-
robot cells, using nested meta-heuristic swarm algo-
rithms. Procedia CIRP, 72:386–391.
Pitonakova, L., Giuliani, M., Pipe, A., and Winfield, A.
(2018). Feature and performance comparison of the
v-rep, gazebo and argos robot simulators. In Towards
Autonomous Robotic Systems: 19th Annual Confer-
ence, TAROS 2018, Bristol, UK July 25-27, 2018, Pro-
ceedings 19, pages 357–368. Springer.
Queralta, J. P., Taipalmaa, J., Can Pullinen, B., Sarker,
V. K., Nguyen Gia, T., Tenhunen, H., Gabbouj, M.,
Raitoharju, J., and Westerlund, T. (2020). Collabo-
rative multi-robot search and rescue: Planning, coor-
dination, perception, and active vision. IEEE access,
8:191617–191643.
Rappaport, T. S. (1996). Wireless communications - princi-
ples and practice. Prentice Hall.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
122
