Multi-Scale Foreground-Background Confidence
for Out-of-Distribution Segmentation
Samuel Marschall
1
and Kira Maag
2
1
Technical University of Berlin, Germany
2
Heinrich-Heine-University D
¨
usseldorf, Germany
Keywords:
Deep Learning, Computer Vision, Out-of-Distribution Segmentation, Foreground-Background Segmentation.
Abstract:
Deep neural networks have shown outstanding performance in computer vision tasks such as semantic seg-
mentation and have defined the state-of-the-art. However, these segmentation models are trained on a closed
and predefined set of semantic classes, which leads to significant prediction failures in open-world scenar-
ios on unknown objects. As this behavior prevents the application in safety-critical applications such as
automated driving, the detection and segmentation of these objects from outside their predefined semantic
space (out-of-distribution (OOD) objects) is of the utmost importance. In this work, we present a multi-scale
OOD segmentation method that exploits the confidence information of a foreground-background segmenta-
tion model. While semantic segmentation models are trained on specific classes, this restriction does not apply
to foreground-background methods making them suitable for OOD segmentation. We consider the per pixel
confidence score of the model prediction which is close to 1 for a pixel in a foreground object. By aggregating
these confidence values for different sized patches, objects of various sizes can be identified in a single image.
Our experiments show improved performance of our method in OOD segmentation compared to comparable
baselines in the SegmentMeIfYouCan benchmark.
1 INTRODUCTION
Deep neural networks (DNNs) have demonstrated
outstanding performance in computer vision tasks
like image classification (Wortsman et al., 2022), ob-
ject detection (Wang et al., 2023a), instance segmen-
tation (Yan et al., 2023) and semantic segmentation
(Xu et al., 2023). These computer vision tasks are
also frequently used in safety-critical areas such as
medical diagnosis and automated driving. In the lat-
ter case, information about the environment, i.e., an
understanding of the scene, is of highest importance
and can be provided by e.g. semantic segmentation
(pixels of an input image are decomposed into seg-
ments which are assigned to a fixed and predefined set
of semantic classes). Currently, the leading method
(H
¨
ummer et al., 2023) for semantic segmentation on
the Cityscapes test dataset (Cordts et al., 2016), which
represents a street scenario of dense urban traffic in
various German cities, achieves a strong mean inter-
section over union score of 86.4%. However, the per-
formance of DNNs degrades rapidly in open-world
scenarios on unseen objects for which the network
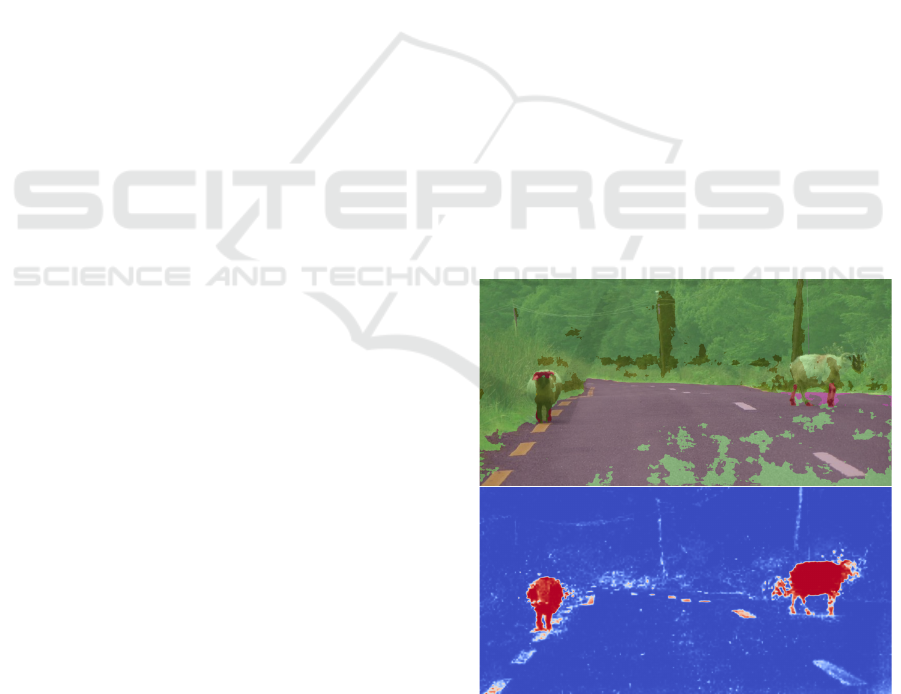
has not been trained. An example of two sheep cross-
Figure 1: Top: Semantic segmentation predicted by a DNN.
Bottom: Confidence heatmap obtained by our method.
ing a road is shown in Figure 1 (top). These objects
from outside the network’s semantic space are called
out-of-distribution (OOD) objects. On the one hand,
486
Marschall, S. and Maag, K.
Multi-Scale Foreground-Background Confidence for Out-of-Distribution Segmentation.
DOI: 10.5220/0013241800003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
486-496
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

these can really be new object classes, such as an-
imals, or, on the other hand, objects that belong to
a known class but appear significantly different from
other objects of the same class seen during training.
Independent of the object type, it is crucial to detect
and segment them to protect the network from incor-
rect and dangerous predictions. The computer vision
task of identification and segmentation of these ob-
jects is referred to as OOD segmentation (Chan et al.,
2021a; Maag et al., 2023).
A broad area of OOD segmentation methods are
uncertainty-based techniques that do not use retrain-
ing or OOD data. A well-known approach to estimate
model uncertainty is Bayesian modeling (MacKay,
1992). Monte Carlo Dropout (MC Dropout, (Gal and
Ghahramani, 2016)) is computationally feasible for
computer vision tasks, thus serving as an approxima-
tion for Bayesian models, and has already been ap-
plied to semantic segmentation (Lee et al., 2020). A
similar idea is to use ensemble learning to capture un-
certainty, i.e., averaging predictions over multiple sets
of parameters (Lakshminarayanan et al., 2017). In ad-
dition to these sampling strategies, there are also un-
certainty estimation methods that are based only on
the output of the DNN, for example maximum soft-
max probability (Hendrycks and Gimpel, 2016). In
(Maag and Riedlinger, 2024), the pixel-wise gradient
norms were introduced. The magnitude features of
gradients at inference time provide information about
the uncertainty propagated in the corresponding for-
ward pass. A benchmark for uncertainty estimation
in the real-world task of semantic segmentation for
urban driving is presented in (Blum et al., 2019a)
where pixel-wise uncertainty estimates are evaluated
towards the detection of anomalous objects in front of
the ego-car.
In this work, we introduce a multi-scale OOD
segmentation method that exploits the confidence in-
formation of a foreground-background segmentation
model on patches of different sizes and aggregates
them into a single OOD score map. The terms con-
fidence and uncertainty are directly linked, as confi-
dence describes how strongly the model believes that
its prediction is correct, while uncertainty describes
the degree of doubt the model has about its predic-
tion. Both concepts are based on the predicted out-
put probabilities of the network. Note, our approach
also does not require any additional training or aux-
iliary data. An overview of our method is given in
Figure 2. The latest foreground-background models
(Sim
´
eoni et al., 2023; Wang et al., 2023b) are trained
in a self-supervised way on datasets like ImageNet
(Deng et al., 2009) to generate a binary mask indi-
cating foreground or background. Datasets like Im-
ageNet are also commonly used to train vision back-
bones. In comparison to supervised semantic segmen-
tation models using a closed set of predefined classes,
this independence from class prediction makes it rea-
sonable to apply these models to the detection of un-
known objects. Since these models focus on images
in which one or more objects are present and these
differ from the background, the prediction of fore-
ground objects in real street scenes is more complex
and the classification into foreground and background
is not necessarily unambiguous (Maag and Rottmann,
2023). For this reason, we propose a multi-scale
approach to detect OOD objects of different sizes
and also show different approaches to aggregate these
patches of various sizes. Moreover, we do not use
the binary output of the model but the per pixel confi-
dence score of the model prediction which is close to
1 for a pixel in a foreground object. By aggregating
these confidence scores across the different patches,
different sized objects in a single image can be identi-
fied. Furthermore, it has already been shown in other
works that uncertainty information extracted from the
softmax output of a DNN for semantic segmenta-
tion is appropriate for segmenting OOD objects, espe-
cially if the input images resemble the training images
and only contain additional unknown objects. Thus,
we combine our foreground-background confidence
heatmap with the pixel-wise softmax uncertainty of a
semantic segmentation network.
Our contributions can be summarized as follows:
• We introduce a new OOD segmentation method
based on confidence information of a foreground-
background model.
• We describe various approaches for the multi-
scale procedure, i.e., how the image patches of
different sizes can be constructed and combined.
• We show how and in which cases our confidence
approach can be supported by uncertainty infor-
mation from a semantic segmentation network.
• We demonstrate the effectiveness of our method
for OOD segmentation on different OOD
datasets outperforming a variety of comparable
(uncertainty-based) methods.
2 RELATED WORK
Various uncertainty methods have already been tested
for OOD segmentation, including maximum soft-
max probability (Hendrycks and Gimpel, 2016)
and sampling-based methods such as MC Dropout
(Mukhoti and Gal, 2018) and deep ensembles (Laksh-
minarayanan et al., 2017). In (Maag and Riedlinger,
Multi-Scale Foreground-Background Confidence for Out-of-Distribution Segmentation
487

2024), the pixel-wise gradient norms (PGN) were in-
troduced which provide information about the uncer-
tainty propagated in the corresponding forward pass.
The methods Mahalanobis (Lee et al., 2018) and
ODIN (Liang et al., 2018) enhance the separation of
softmax score in- and out-of-distributions by perform-
ing adversarial attacks on the input images.
Other OOD segmentation methods do not con-
sider the output of the DNN, instead focusing on
the feature space. Density estimation of the in-
distribution feature representations is conducted in
(Galesso et al., 2023) using a nearest-neighbor ap-
proach. An online data condensation algorithm is
presented in (Voj
´
ı
ˇ
r et al., 2024) which extracts a
pixel/patch feature representation and builds a two-
dimensional projection space to find the optimal and
calibrated in- and out-of-distribution decision strat-
egy. In (Sodano et al., 2024), two decoders are used
to push features of pixels belonging to the same class
together, one decoder produces a Gaussian model
for each known category and the other performs bi-
nary anomaly segmentation. The method described in
(Ackermann et al., 2023) accesses neither the feature
space nor the pure output, but the raw mask predic-
tion of a mask-based semantic segmentation network.
These networks also learn to assign certain masks to
anomalies but such masks are discarded by default
when generating semantic predictions.
Another line of research relies on the exploitation
of OOD data for training, which is disjoint from the
original training data (Biase et al., 2021; Blum et al.,
2019b; Chan et al., 2021b; Gao et al., 2023; Grcic
et al., 2022; Grcic et al., 2023; Liu et al., 2023; Rai
et al., 2023; Tian et al., 2022). However, the addi-
tional data does not have to be real-world data, rather
it can be created synthetically. This synthetic nega-
tives are for example used to reduce energy in neg-
ative pixels (Nayal et al., 2023). In (Deli
´
c et al.,
2024), an ensemble of in-distribution uncertainty and
the posterior of the negative class formulate a novel
outlier score. This type of research also includes
works that use the normalizing flow to generate the
negative data (Blum et al., 2019b; Grcic et al., 2021;
Gudovskiy et al., 2023).
Alternative methods for OOD segmentation use
complex auxiliary models. In (Besnier et al., 2021),
an image is perturbed by a local adversarial attack and
the observer network is trained to predict network’s
errors. Discrepancy networks are used in (Lis et al.,
2019; Lis et al., 2020) to compare the original im-
age and the resynthesized one highlighting the unex-
pected objects. To recognize and reconstruct road, a
reconstruction module is trained in (Voj
´
ı
ˇ
r et al., 2021;
Voj
´
ı
ˇ
r and Matas, 2023), as a poor reconstruction is
due to areas that are outside of the training distri-
bution. In (Zhang et al., 2024), a pixel decoder, a
transformer decoder, a base teacher network and mul-
tilayer perceptrons are trained together for OOD de-
tection.
Specialized training approaches for OOD segmen-
tation rely on various types of retraining with addi-
tional data, i.e., OOD data or synthetically generated
data, which often requires generative models. Our
method does not need retraining, OOD data or com-
plex auxiliary models. Our approach is more similar
to classical approaches quantifying uncertainty, since
we only use in-distribution data and rely on the out-
put of the network. In particular, our method is com-
parable to sampling methods (MC Dropout and deep
ensembles) due to our multi-scale approach, even
though we do not use average predictions over mul-
tiple sets of parameters. In addition, we compare with
Mahalanobis and ODIN, whose goal is to calibrate the
softmax score, even if the computation of adversarial
samples requires a full backward pass.
3 METHOD DESCRIPTION
In this section, we describe our OOD detection
method, which consists of two branches, i.e., the
multi-scale foreground-background segmentation and
the semantic segmentation. An overview of our ap-
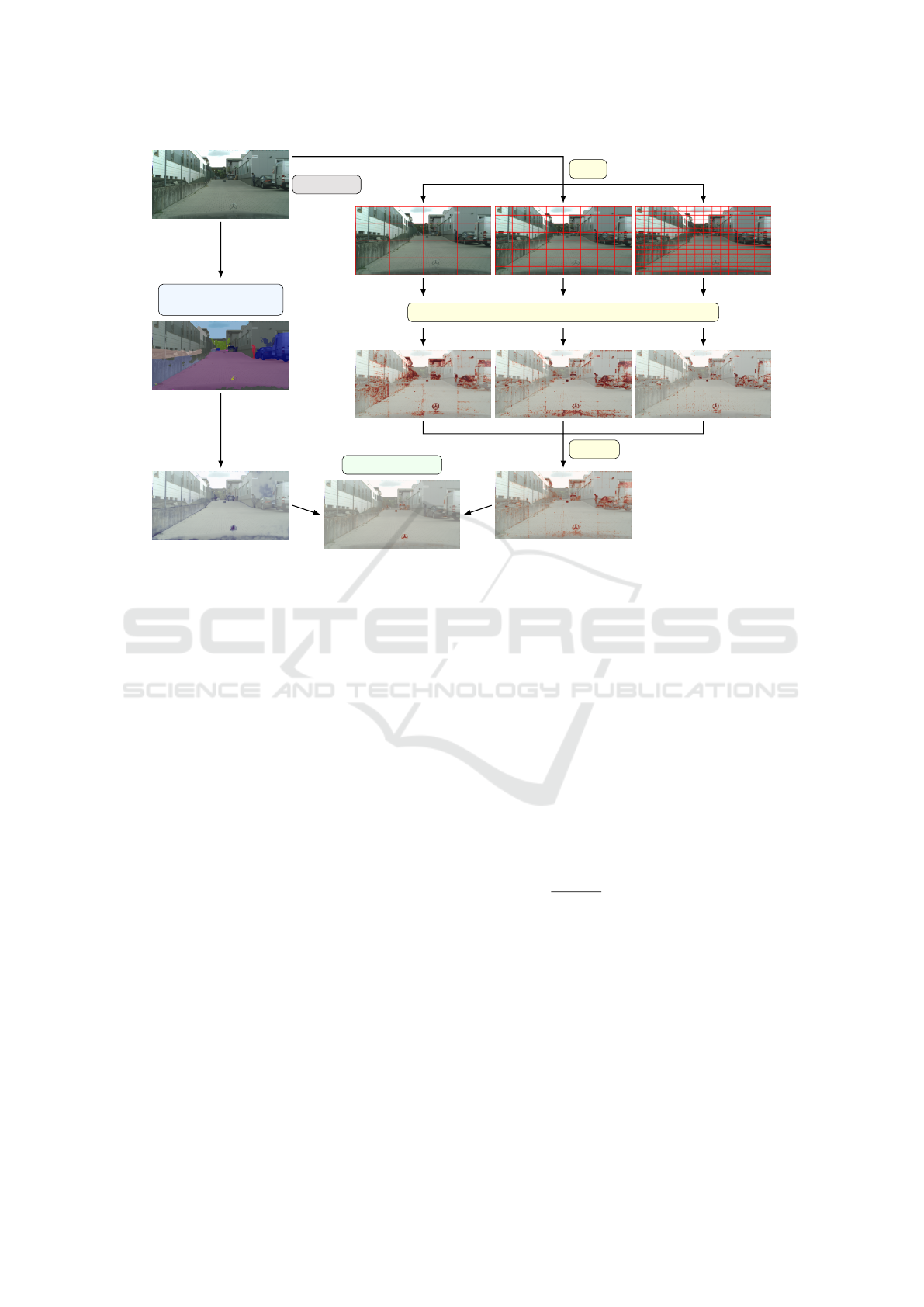
proach is shown in Figure 2.
Multi-Scale Foreground-Background Segmenta-
tion. In the first branch, the input images are divided
into patches and fed into the foreground-background
model. Let x ∈ R
H×W×3
denote the input image in
RGB-format with height H and width W . We re-
shape this image into a sequence of patches X =
{x
n
∈ R
P
H
×P
W
×3
}
n=1,...,N
where P
H
× P
W
describes
the patch size and N =
H
P
H
·
W
P
W
the number of patches.
Here, we assume that the patches do not overlap and
that the image is completely covered by the patches,
i.e., they do not extend over the boundary of the im-
age. Otherwise we can just perform a suitable re-
size operation first. Each single image patch x
n
is
then fed into a foreground-background segmentation
model which outputs θ
n
(x
n
) ∈ [0, 1]
P
H
×P
W
providing
the predicted probability for each pixel to belong to a
foreground object using the sigmoid function. Since
the individual patches do not overlap, we can sim-
ply reassemble all these individual masks to obtain a
mask θ(x) ∈ [0, 1]
H×W
that covers the complete orig-
inal image. Note, assuming that the patches do not
overlap, their sizes do not have to be the identical, but
can vary within a single image.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
488
RGB image
semantic segmentation
model
slice
foreground-background segmentation model
combine
OoD segmentation
Figure 2: Schematic illustration of our multi-scale OOD segmentation method. On the one hand, the input image is divided
into different sized slices, inferred by the foreground-background model and the confidence heatmaps are aggregated into a
single output map. On the other hand, the image is fed into a semantic segmentation network, which outputs an uncertainty
heatmap, which is then combined with the confidence map of the foreground-background model to obtain the final OOD
segmentation.
Since the OOD objects in an image can differ in
size, we use patches of different sizes. This means
that we completely divide the input image into equally
sized patches of size P
i
H
× P
i
W
and then divide the im-
age again into equally sized patches, but with a dif-
ferent scale (P
i+1
H
× P
i+1
W
). In total, we obtain a set
of predicted masks from the foreground-background
model {θ
i
(x) ∈ [0, 1]
H×W
}
i=1,...,d
where d describes
the number of different scales. In Figure 2, for exam-
ple, we have used three different scales (d = 3), with
N (number of patches per image) having the values
16, 64 and 256, respectively. The predicted masks are
combined by
ˆ
θ(x) =
d
∑
i=1
α
i
θ
i
(x) ∈ [0, 1]
H×W
, (1)
where α
i
∈ [0, 1], i = 1, . . . , d, with
∑
d
i=1
α
i
= 1. This
aggregated multi-scale prediction provides pixel-wise
information about the confidence of each pixel be-
longing to a foreground object, i.e., values close to
0 or 1 indicate high confidence that there is no ob-
ject or there is an object at that position, whereas val-
ues close to 0.5 indicate high uncertainty. Here, fore-
ground corresponds with OOD object, as OOD ob-
jects are located on the street and are therefore clearly
in the foreground.
Semantic Segmentation. In the other branch, we
consider a semantic segmentation network. Each
pixel z of an input image x gets assigned a label y
from a prescribed label space C = {y
1
, . . . , y
c
}. Given
learned weights w, the DNN provides for the z-th
pixel a probability distribution f (x;w)
z
∈ [0, 1]
|C|
con-
sisting of the probabilities for each class y ∈ C de-
noted by p(y|x)
z
∈ [0, 1]. Note, the predicted class is
then computed by ˆy
x
z
= argmax
y∈C
p(y|x)
z
.
The uncertainty in the semantic segmentation pre-
diction is quantified by the commonly used entropy,
which is defined by
E(x)
z
= −
1
log(|C|)
∑
y∈C
p(y|x)
z
· log p(y|x)
z
∈ [0, 1] ,
(2)
whereby the fraction only serves for normalization.
Entropy values close to 1 indicate high uncertainty,
as all classes are equally distributed, which may in-
dicate an unknown class, i.e., an OOD pixel. Since
OOD objects are mainly located on the street, another
uncertainty measure that can indicate these objects is
the predicted probability for the class “road”. High
values indicate OOD objects, thus, we use
R(x)
z
= 1 − p(y = “road”|x)
z
∈ [0, 1] (3)
as another uncertainty heatmap.
Multi-Scale Foreground-Background Confidence for Out-of-Distribution Segmentation
489

The idea is that this uncertainty information
from the semantic segmentation network supports the
foreground-background model in OOD segmentation,
especially in cases where these images are similar to
the training data. The final confidence map for an im-
age x is computed by
ˆ
θ(x) ∗ D(x) ∈ [0, 1]
H×W
, D ∈ {E, R} , (4)
using the component-wise multiplication. Note, the
focus of our method is on the multi-scale confidence
of the foreground-background model, so this second
branch is optional.
4 EXPERIMENTS
First, we present the experimental setting and then
study our method in terms of its OOD segmentation
capability.
4.1 Experimental Setting
Segmentation Models. For the foreground-
background segmentation, we consider two recent
models, FOUND (Sim
´
eoni et al., 2023) and CutLER
(Wang et al., 2023b). Both methods use the vision
transformer DINO (Caron et al., 2021) as basis and
are self-supervised trained on the ImageNet dataset
(Deng et al., 2009), which provides image data for
training large-scale object recognition. Note, the
ImageNet dataset is also frequently used for the back-
bone training of semantic segmentation networks.
For semantic segmentation, we use the state-of-the-
art DeepLabv3+ network (Chen et al., 2018) with
ResNet-101 backbone (He et al., 2016). This DNN is
trained on the Cityscapes dataset (Cordts et al., 2016)
achieving a mean intersection over union (mIoU) of
80.21%. The Cityscapes dataset consists of dense
urban traffic from various German cities.
OOD Datasets. To evaluate the OOD segmenta-
tion performance of our method, we consider the
three datasets from the SegmentMeIfYouCan bench-
mark
1
. The LostAndFound dataset (Pinggera et al.,
2016) includes 1,203 validation images, with annota-
tions marking the road surface and the OOD objects,
specifically small obstacles on German roads posi-
tioned in front of the ego-vehicle. A refined version,
LostAndFound test-NoKnown, is available in (Chan
et al., 2021a). The RoadObstacle21 dataset (Chan
et al., 2021a) consists of 412 test images and is similar
1
http://segmentmeifyoucan.com/
Table 1: OOD segmentation results for the FOUND model
applied to LostAndFound with different number of patches
N as well as combinations of these confidence maps.
LostAndFound test-NoKnown
AuPRC ↑ FPR
95
↓ sIoU ↑ PPV ↑ F
1
↑
1 44.5 44.4 7.7 18.1 6.1
16 47.4 23.8 19.4 23.0 15.6
64 45.6 18.9 27.8 21.2 16.4
256 38.4 21.4 26.7 17.4 10.1
1024 24.6 40.6 26.5 16.0 6.5
16+64 52.0 15.0 24.0 24.3 18.0
16+64+256 54.0 11.8 29.9 22.3 18.8
16+64+256+1024 56.5 10.6 32.2 22.5 19.5
1+16+64+256 54.0 12.7 24.9 23.1 17.4
1+16+64+256+1024 56.4 11.7 26.0 25.2 18.7
Table 2: OOD segmentation results for the CutLER model
applied to LostAndFound with different number of patches
N as well as combinations of these confidence maps.
LostAndFound test-NoKnown
AuPRC ↑ FPR
95
↓ sIoU ↑ PPV ↑ F
1
↑
1 22.5 100 6.4 56.5 13.0
16 18.1 100 1.7 35.2 3.1
64 22.3 100 2.9 45.8 5.1
256 18.2 100 3.0 50.2 4.6
1+64 30.9 54.3 18.7 42.2 24.8
1+16+64 33.8 66.2 15.5 43.4 22.8
1+16+64+256 37.1 63.6 13.7 50.0 19.9
to the LostAndFound dataset, as all obstacles are po-
sitioned on the street. However, it offers greater diver-
sity in both, the OOD objects and situational contexts.
Meanwhile, the RoadAnomaly21 dataset (Chan et al.,
2021a), containing 100 test images, presents various
unique objects (anomalies) that can appear anywhere
within the image.
Evaluation Metrics. To assess the OOD segmen-
tation performance, we follow the evaluation pro-
tocol of the official SegmentMeIfYouCan bench-
mark. For the evaluation on pixel-level, the threshold-
independent area under the precision-recall curve
(AuPRC) is used which measures the separability be-
tween OOD and not OOD. In addition, the false pos-
itive rate at 95% true positive rate (FPR
95
) serves as
safety-critical metric of how many false positive er-
rors must be made in order to achieve the desired rate
of true positive predictions. For the segment-level
evaluation, the set of metrics includes an adjusted ver-
sion of the mIoU (sIoU) to assess segmentation ac-
curacy at a specific threshold, the positive predictive
value (PPV or precision) as binary instance-wise ac-
curacy and the F
1
-score. These segment-wise metrics
are averaged across thresholds from 0.25 to 0.75 in
steps of 0.05, yielding sIoU, PPV and F
1
.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
490
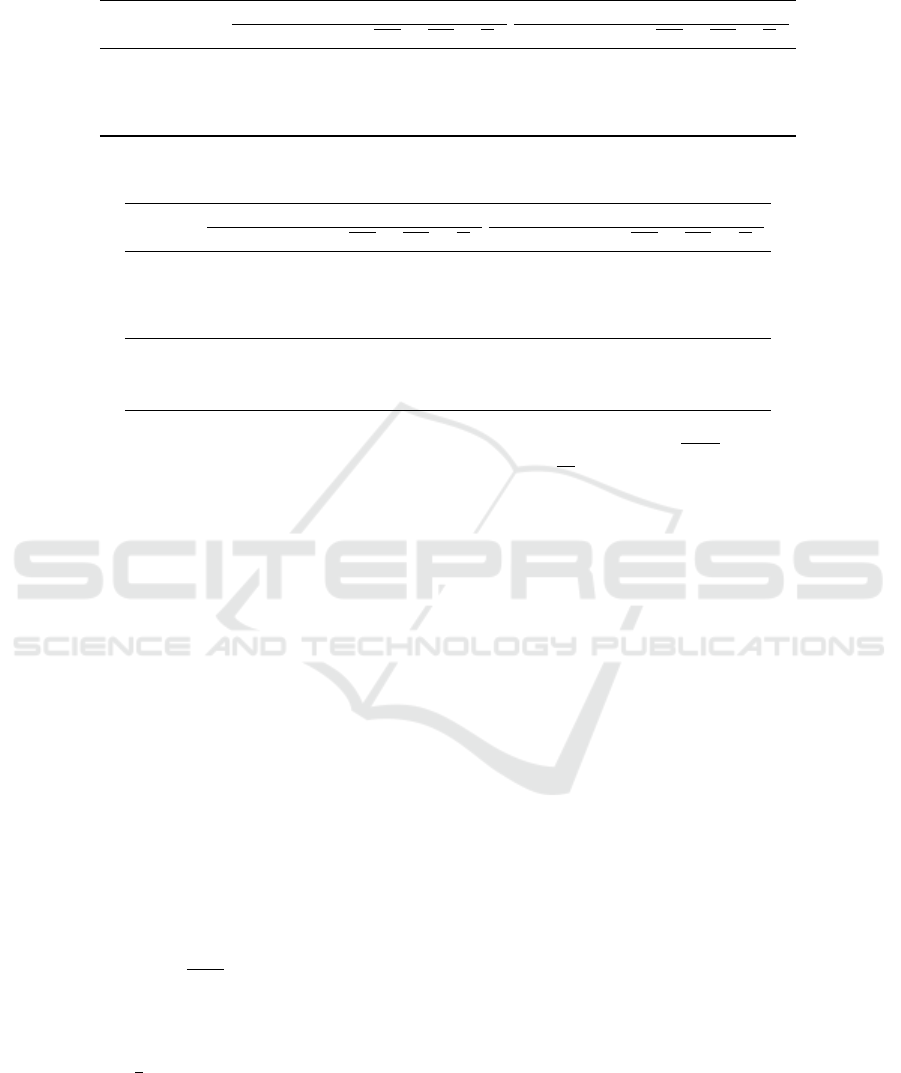
Table 3: OOD segmentation results for the multi-scale FOUND model applied to LostAndFound in combination with uncer-
tainty heatmaps obtained by the semantic segmentation network.
entropy E road probability R
AuPRC ↑ FPR
95
↓ sIoU ↑ PPV ↑ F
1
↑ AuPRC ↑ FPR
95
↓ sIoU ↑ PPV ↑ F
1
↑
16+64 75.7 4.9 36.1 41.8 35.6 63.9 6.6 27.0 35.6 25.1
16+64+256 77.1 4.4 39.2 41.7 37.8 65.5 6.3 29.0 37.0 26.9
16+64+256+1024 77.6 4.2 40.6 43.5 39.5 65.9 6.3 29.9 37.3 27.6
1+16+64+256 76.4 4.6 36.9 43.5 37.1 64.2 6.7 27.1 36.8 25.7
1+16+64+256+1024 76.9 4.5 37.8 44.7 38.3 64.6 6.7 27.5 38.0 26.5
Table 4: OOD segmentation results for the FOUND model applied to RoadAnomaly21 and RoadObstacle21 with different
number of patches N as well as combinations of these confidence maps.
RoadAnomaly21 RoadObstacle21
AuPRC ↑ FPR
95
↓ sIoU ↑ PPV ↑ F
1
↑ AuPRC ↑ FPR
95
↓ sIoU ↑ PPV ↑ F
1
↑
1 81.9 11.0 48.0 23.8 10.6 62.3 24.5 13.1 25.1 13.3
4 75.5 17.1 54.1 22.2 8.5 76.5 17.8 27.6 43.3 31.3
16 68.4 27.0 60.3 15.3 5.7 70.8 12.9 38.4 36.4 32.6
64 60.6 42.0 59.6 10.6 3.0 56.0 64.1 39.5 24.5 20.8
256 43.7 68.8 46.3 9.4 1.0 29.9 84.4 30.8 18.7 8.9
1+4 81.0 9.9 53.8 26.7 13.6 76.5 14.1 21.2 42.7 25.8
1+4+16 80.2 8.8 58.8 21.2 12.3 81.4 4.4 30.9 38.3 29.8
1+4+16+64 78.9 8.9 64.1 16.1 10.1 81.6 2.0 39.7 34.0 32.9
16+64+256 65.4 26.1 62.9 10.6 3.9 64.6 11.4 45.2 25.3 22.2
4.2 Numerical Results
Comparison of Foreground-Background Models.
First, we compare the two foreground-background
models using different scales, i.e., patch sizes. To
this end, we feed the image as a whole into the mod-
els (N = 1), as well as with different numbers of
patches N, whereby the patches per scale have the
same size (see Figure 2). For FOUND, we con-
sider N = 1, 16, 64, 256, 1024 and for CutLER N =
1, 16, 64, 256. Note, as CutLER is more computation-
ally expensive, we do not run this model with 1024
patches. The results for both models applied to the
LostAndFound dataset are shown in the upper section
of Tables 1 and 2, respectively. The best results for
FOUND are achieved with a number of 16 and 64
patches, and for CutLER when the whole image is
fed into the model. This is due to the reason that Cut-
LER focuses on object detection/instance segmenta-
tion, while FOUND concentrates on the distinction
between foreground and background pixels. This be-
havior is also reflected in the performance values, as
FOUND is convincing in the pixel-wise metrics and
CutLER achieves high PPV values.
In the bottom part of both tables the results for
the different combinations of the confidence maps
for various scales are given with a uniform weight-
ing, i.e., α
i
=
1
d
, i = 1, . . . , d. The idea of these
combinations is to match the best performing scales
with each other. We observe that the multi-scale
approach produces significantly improved results for
both foreground-background models. Moreover,
FOUND clearly outperforms CutLER in three met-
rics (AuPRC, FPR
95
and sIoU) and achieves similar
scores for F
1
. For this reason and as CutLER is more
expensive computationally, we will only conduct fur-
ther experiments with FOUND.
In Appendix 5, there are further experiments for
FOUND applied to LostAndFound, where the combi-
nation of the different scales is not uniform, but with
different weights α
i
. Furthermore, we have conducted
experiments where the confidence maps of the differ-
ent scales are not combined, but patches of different
sizes are applied in one image. Both procedures show
no or only minor improvements in individual metrics
compared to the results obtained in Table 1.
Including Uncertainty of Semantic Segmentation.
In this paragraph, we combine the confidence maps
of the multi-scale foreground-background model ap-
proach with the uncertainty heatmaps obtained by the
semantic segmentation model. The results for the
multi-scale FOUND model applied to the LostAnd-
Found dataset in combination with the two uncer-
tainty heatmaps, i.e., entropy and the road probability,
are given in Table 3. The additional uncertainty infor-
mation improves performance even further (in com-
parison to Table 1), independent of the uncertainty
heatmap. This might be caused by the fact that the
LostAndFound images depict similar street scenes as
the in-distribution dataset Cityscapes. The highest
results are again achieved with a uniform combina-
tion of the confidence maps of N = 16, 64, 256, 1024.
When comparing the two uncertainty heatmaps, the
entropy outperforms the road probability in all met-
rics.
Multi-Scale Foreground-Background Confidence for Out-of-Distribution Segmentation
491
(a) LostAndFound (b) RoadAnomaly21 (c) RoadObstacle21
Figure 3: Top: RGB images of the LostAndFound, RoadAnomaly21 and RoadObstacle21 dataset. Bottom: The corresponding
OOD segmentation heatmaps obtained by our method.
Results for RoadAnomaly21 and RoadObstacle21.
The results for the RoadAnomaly21 and the Road-
Obstacle21 dataset for different number of patches
N as well as combinations of these confidence maps
are shown in Table 4. Since in both datasets, espe-
cially in RoadAnomaly21 (see Figure 3 (b)), there
are also larger OOD in the images, we also consider
N = 4, i.e., divide the inputs into only 4 slices. We
observe again that the combination of different scales
performs better than slicing just one image. In Ap-
pendix 5, we also show the results in combination
with the entropy as an uncertainty heatmap. For both
datasets, the entropy cannot enhance the OOD seg-
mentation performance. The RoadAnomaly21 dataset
differs greatly from Cityscapes, as large objects are in
the foreground and the background does not resem-
ble the dense urban traffic in Germany. The Road-
Obstacle21 dataset contains street scenes but under
different conditions (e.g. snow or highway). In
Figure 3, we show one example per dataset for our
OOD segmentation heatmaps derived from the best
performing combination, i.e., the uniform combina-
tion of the confidence maps of N = 1, 4 for Road-
Anomaly21, N = 1, 4, 16, 64 for RoadObstacle21 and
N = 16, 64, 256, 1024 multiplied with the entropy E
for LostAndFound.
Comparison with Baselines. Here, we com-
pare our method with the comparable baselines
from the SegmentMeIfYouCan benchmark, i.e., the
uncertainty-based approaches (Maximum Softmax,
MC Dropout, Ensemble and PGN) as well as the ones
using adversarial attacks (ODIN and Mahalanobis).
For our approach, we use the combinations men-
tioned above, which we have also applied in Figure 3.
The OOD segmentation results on the LostAnd-
Found dataset are given in Table 5 and on the Road-
Table 5: OOD segmentation benchmark results for the Lo-
stAndFound dataset.
LostAndFound test-NoKnown
AuPRC ↑ FPR
95
↓ sIoU ↑ PPV ↑ F
1
↑
Maximum Softmax 30.1 33.2 14.2 62.2 10.3
MC Dropout 36.8 35.6 17.4 34.7 13.0
Ensemble 2.9 82.0 6.7 7.6 2.7
PGN 69.3 9.8 50.0 44.8 45.4
ODIN 52.9 30.0 39.8 49.3 34.5
Mahalanobis 55.0 12.9 33.8 31.7 22.1
ours 77.6 4.2 40.6 43.5 39.5
Anomaly21 as well as the RoadObstacle21 dataset
in Table 6. For LostAndFound, we achieve com-
paratively high results, similar to the gradient-based
PGN method. As previously mentioned, the LostAnd-
Found dataset is similar to Cityscapes only with OOD
objects, which is why the uncertainty methods per-
form well. This behavior has also been shown in
our experiments where the entropy heatmaps enhance
our foreground-background predictions. For Road-
Anomaly21 and RoadObstacle21, we significantly
exceed the baselines, e.g. we obtain AuPRC values of
about 81% for both datasets, which means an increase
of more than 44.3 percentage points. Also worth men-
tioning are the low FPR
95
values of 9.9% and 2.0%,
respectively. This shows that our method is more ro-
bust than the uncertainty-based methods when the en-
vironment changes.
5 CONCLUSION
In this work, we presented a multi-scale OOD seg-
mentation method that exploits the confidence in-
formation of a foreground-background segmenta-
tion model. In comparison to supervised semantic
segmentation models using a closed set of prede-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
492

Table 6: OOD segmentation benchmark results for the RoadAnomaly21 and the RoadObstacle21 dataset.
RoadAnomaly21 RoadObstacle21
AuPRC ↑ FPR
95
↓ sIoU ↑ PPV ↑ F
1
↑ AuPRC ↑ FPR
95
↓ sIoU ↑ PPV ↑ F
1
↑
Maximum Softmax 28.0 72.1 15.5 15.3 5.4 15.7 16.6 19.7 15.9 6.3
MC Dropout 28.9 69.5 20.5 17.3 4.3 4.9 50.3 5.5 5.8 1.1
Ensemble 17.7 91.1 16.4 20.8 3.4 1.1 77.2 8.6 4.7 1.3
PGN 36.7 61.4 21.6 17.5 6.2 16.5 19.7 19.5 14.9 7.4
ODIN 33.1 71.7 19.5 17.9 5.2 22.1 15.3 21.6 18.5 9.4
Mahalanobis 20.0 87.0 14.8 10.2 2.7 20.9 13.1 13.5 21.8 4.7
ours 81.0 9.9 53.8 26.7 13.6 81.6 2.0 39.7 34.0 32.9
fined classes, this independence from class prediction
makes it reasonable to apply these models to the de-
tection of unknown objects. We considered the per
pixel confidence score which is close to 1 for a pixel in
a foreground object and aggregated these confidence
values for the different sized patches to identify ob-
jects of various sizes in a single image. To this end,
we used different approaches for the multi-scale pro-
cedure, i.e., how the image patches of different sizes
can be constructed and combined. Furthermore, we
have observed that uncertainty information extracted
from the softmax output of a DNN for semantic seg-
mentation supports our method if the input images re-
semble the training images. Note, our approach does
not require any additional training or auxiliary data.
Our experiments have shown the ability of our ap-
proach to segment OOD objects of different datasets
and to outperform comparable baselines in the Seg-
mentMeIfYouCan benchmark.
REFERENCES
Ackermann, J., Sakaridis, C., and Yu, F. (2023). Masko-
maly: Zero-shot mask anomaly segmentation. In
34th British Machine Vision Conference 2023, BMVC.
BMVA.
Besnier, V., Bursuc, A., Picard, D., and Briot, A. (2021).
Triggering failures: Out-of-distribution detection by
learning from local adversarial attacks in semantic
segmentation. In IEEE/CVF International Conference
on Computer Vision (ICCV).
Biase, G. D., Blum, H., Siegwart, R. Y., and Cadena,
C. (2021). Pixel-wise anomaly detection in com-
plex driving scenes. IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
16913–16922.
Blum, H., Sarlin, P.-E., Nieto, J., Siegwart, R., and Ca-
dena, C. (2019a). Fishyscapes: A benchmark for
safe semantic segmentation in autonomous driving. In
IEEE/CVF International Conference on Computer Vi-
sion (ICCV) Workshops.
Blum, H., Sarlin, P.-E., Nieto, J. I., Siegwart, R. Y., and Ca-
dena, C. (2019b). The fishyscapes benchmark: Mea-
suring blind spots in semantic segmentation. Inter-
national Journal of Computer Vision, pages 3119 –
3135.
Caron, M., Touvron, H., Misra, I., Jegou, H., Mairal, J., Bo-
janowski, P., and Joulin, A. (2021). Emerging prop-
erties in self-supervised vision transformers. In 2021
IEEE/CVF International Conference on Computer Vi-
sion (ICCV), pages 9630–9640.
Chan, R., Lis, K., Uhlemeyer, S., Blum, H., Honari, S.,
Siegwart, R., Fua, P., Salzmann, M., and Rottmann,
M. (2021a). Segmentmeifyoucan: A benchmark for
anomaly segmentation. In Conference on Neural In-
formation Processing Systems Datasets and Bench-
marks Track.
Chan, R., Rottmann, M., and Gottschalk, H. (2021b). En-
tropy maximization and meta classification for out-of-
distribution detection in semantic segmentation. In
IEEE/CVF International Conference on Computer Vi-
sion (ICCV).
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sep-
arable convolution for semantic image segmentation.
In European Conference on Computer Vision (ECCV).
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic ur-
ban scene understanding. In 2016 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 3213–3223, Los Alamitos, CA, USA. IEEE
Computer Society.
Deli
´
c, A., Grci
´
c, M., and
ˇ
Segvi
´
c, S. (2024). Outlier detec-
tion by ensembling uncertainty with negative object-
ness.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 248–255.
Gal, Y. and Ghahramani, Z. (2016). Dropout as a bayesian
approximation: Representing model uncertainty in
deep learning. In Proceedings of the 33rd Inter-
national Conference on International Conference on
Machine Learning, volume 48, pages 1050–1059.
Galesso, S., Argus, M., and Brox, T. (2023). Far away in
the deep space: Dense nearest-neighbor-based out-of-
distribution detection. In IEEE International Confer-
ence on Computer Vision (ICCV), Workshops.
Gao, Z., Yan, S., and He, X. (2023). Atta: Anomaly-aware
test-time adaptation for out-of-distribution detection
in segmentation.
Grcic, M., Bevandi
´
c, P., and Segvic, S. (2021). Dense
anomaly detection by robust learning on synthetic
negative data.
Multi-Scale Foreground-Background Confidence for Out-of-Distribution Segmentation
493

Grcic, M., Bevandi
´
c, P., and Segvic, S. (2022). Densehy-
brid: Hybrid anomaly detection for dense open-set
recognition. In European Conference on Computer
Vision (ECCV), pages 500–517.
Grcic, M.,
ˇ
Sari
´
c, J., and
ˇ
Segvi
´
c, S. (2023). On advantages
of mask-level recognition for outlier-aware segmen-
tation. IEEE/CVF Conference on Computer Vision
and Pattern Recognition Workshops (CVPRW), pages
2937–2947.
Gudovskiy, D., Okuno, T., and Nakata, Y. (2023). Con-
current misclassification and out-of-distribution de-
tection for semantic segmentation via energy-based
normalizing flow. In Proceedings of the Thirty-Ninth
Conference on Uncertainty in Artificial Intelligence.
JMLR.org.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep
residual learning for image recognition. In IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Hendrycks, D. and Gimpel, K. (2016). A baseline for de-
tecting misclassified and out-of-distribution examples
in neural networks.
H
¨
ummer, C., Schwonberg, M., Zhou, L., Cao, H., Knoll, A.,
and Gottschalk, H. (2023). Vltseg: Simple transfer of
clip-based vision-language representations for domain
generalized semantic segmentation.
Lakshminarayanan, B., Pritzel, A., and Blundell, C. (2017).
Simple and scalable predictive uncertainty estimation
using deep ensembles. In Proceedings of the 31st
International Conference on Neural Information Pro-
cessing Systems, pages 6405–6416. Curran Associates
Inc.
Lee, H., Kim, S. T., Navab, N., and Ro, Y. (2020). Efficient
ensemble model generation for uncertainty estimation
with bayesian approximation in segmentation.
Lee, K., Lee, K., Lee, H., and Shin, J. (2018). A simple uni-
fied framework for detecting out-of-distribution sam-
ples and adversarial attacks. Neural Information Pro-
cessing Systems (NeurIPS).
Liang, S., Li, Y., and Srikant, R. (2018). Enhancing the re-
liability of out-of-distribution image detection in neu-
ral networks. International Conference on Learning
(ICLR).
Lis, K., Honari, S., Fua, P., and Salzmann, M. (2020). De-
tecting road obstacles by erasing them.
Lis, K., Nakka, K., Fua, P., and Salzmann, M. (2019).
Detecting the unexpected via image resynthesis. In
IEEE/CVF International Conference on Computer Vi-
sion (ICCV).
Liu, Y., Ding, C., Tian, Y., Pang, G., Belagiannis, V., Reid,
I., and Carneiro, G. (2023). Residual pattern learning
for pixel-wise out-of-distribution detection in seman-
tic segmentation. In Proceedings of the IEEE/CVF In-
ternational Conference on Computer Vision (ICCV),
pages 1151–1161.
Maag, K., Chan, R., Uhlemeyer, S., Kowol, K., and
Gottschalk, H. (2023). Two video data sets for track-
ing and retrieval of out of distribution objects. In Com-
puter Vision – ACCV 2022, pages 476–494. Springer
Nature Switzerland.
Maag, K. and Riedlinger, T. (2024). Pixel-wise gradient un-
certainty for convolutional neural networks applied to
out-of-distribution segmentation. International Joint
Conference on Computer Vision, Imaging and Com-
puter Graphics Theory and Applications (VISAPP),
pages 112–122.
Maag, K. and Rottmann, M. (2023). False negative reduc-
tion in semantic segmentation under domain shift us-
ing depth estimation. In Proceedings of the 18th Inter-
national Joint Conference on Computer Vision, Imag-
ing and Computer Graphics Theory and Applications.
SCITEPRESS - Science and Technology Publications.
MacKay, D. J. C. (1992). A practical bayesian framework
for backpropagation networks. Neural Computation,
4(3):448–472.
Mukhoti, J. and Gal, Y. (2018). Evaluating bayesian deep
learning methods for semantic segmentation.
Nayal, N., Yavuz, M., Henriques, J. a. F., and G
¨
uney, F.
(2023). Rba: Segmenting unknown regions rejected
by all. In Proceedings of the IEEE/CVF International
Conference on Computer Vision (ICCV), pages 711–
722.
Pinggera, P., Ramos, S., Gehrig, S., Franke, U., Rother,
C., and Mester, R. (2016). Lost and found: de-
tecting small road hazards for self-driving vehicles.
In IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS).
Rai, S. N., Cermelli, F., Fontanel, D., Masone, C., and Ca-
puto, B. (2023). Unmasking anomalies in road-scene
segmentation. In Proceedings of the IEEE/CVF In-
ternational Conference on Computer Vision (ICCV),
pages 4037–4046.
Sim
´
eoni, O., Sekkat, C., Puy, G., Vobecky, A., Zablocki, E.,
and P
´
erez, P. (2023). Unsupervised object localiza-
tion: Observing the background to discover objects.
In 2023 IEEE/CVF Conference on Computer Vision
and Pattern Recognition (CVPR), pages 3176–3186.
Sodano, M., Magistri, F., Nunes, L., Behley, J., and Stach-
niss, C. (2024). Open-World Semantic Segmentation
Including Class Similarity . In 2024 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 3184–3194. IEEE Computer Society.
Tian, Y., Liu, Y., Pang, G., Liu, F., Chen, Y., and Carneiro,
G. (2022). Pixel-wise energy-biased abstention learn-
ing for anomaly segmentation on complex urban driv-
ing scenes. In European Conference on Computer Vi-
sion (ECCV).
Voj
´
ı
ˇ
r, T. and Matas, J. (2023). Image-consistent de-
tection of road anomalies as unpredictable patches.
In IEEE/CVF Winter Conference on Applications of
Computer Vision (WACV), pages 5480–5489.
Voj
´
ı
ˇ
r, T.,
ˇ
Sipka, T., Aljundi, R., Chumerin, N., Reino, D. O.,
and Matas, J. (2021). Road anomaly detection by par-
tial image reconstruction with segmentation coupling.
In IEEE/CVF International Conference on Computer
Vision (ICCV), pages 15651–15660.
Voj
´
ı
ˇ
r, T.,
ˇ
Sochman, J., and Matas, J. (2024). Pixood: Pixel-
level out-of-distribution detection.
Wang, C.-Y., Bochkovskiy, A., and Liao, H.-Y. M. (2023a).
Yolov7: Trainable bag-of-freebies sets new state-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
494

of-the-art for real-time object detectors. In 2023
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 7464–7475.
Wang, X., Girdhar, R., Yu, S. X., and Misra, I. (2023b).
Cut and learn for unsupervised object detection and
instance segmentation. In IEEE/CVF Conference on
Computer Vision and Pattern Recognition (CVPR),
pages 3124–3134. IEEE.
Wortsman, M., Ilharco, G., Gadre, S. Y., Roelofs, R.,
Gontijo-Lopes, R., Morcos, A. S., Namkoong, H.,
Farhadi, A., Carmon, Y., Kornblith, S., and Schmidt,
L. (2022). Model soups: averaging weights of multi-
ple fine-tuned models improves accuracy without in-
creasing inference time. In Chaudhuri, K., Jegelka,
S., Song, L., Szepesvari, C., Niu, G., and Sabato, S.,
editors, Proceedings of the 39th International Confer-
ence on Machine Learning, volume 162 of Proceed-
ings of Machine Learning Research, pages 23965–
23998. PMLR.
Xu, J., Xiong, Z., and Bhattacharyya, S. P. (2023). Pidnet:
A real-time semantic segmentation network inspired
by pid controllers. In 2023 IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 19529–19539. IEEE Computer Society.
Yan, B., Jiang, Y., Wu, J., Wang, D., Luo, P., Yuan, Z., and
Lu, H. (2023). Universal instance perception as ob-
ject discovery and retrieval. In 2023 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 15325–15336. IEEE Computer Soci-
ety.
Zhang, H., Li, F., Qi, L., Yang, M.-H., and Ahuja, N.
(2024). Csl: Class-agnostic structure-constrained
learning for segmentation including the unseen.
APPENDIX
More Numerical Results
The following experiments are conducted with
FOUND as foreground-background model. In the
main paper, we have uniformly combined the differ-
ently scaled confidence maps. In the following, we
investigate whether a non-uniform weighting of the
maps can further improve the OOD segmentation per-
formance. We have tested several weightings using
confidence maps with N = 1, 16, 64, 256, 1024, see
Table 7. The corresponding results are shown in Ta-
ble 8. For a simple comparison, the best performing
uniform combination is given as a baseline. We ob-
serve no or only minor improvements in individual
metrics compared to the baseline.
Furthermore, we have conducted experiments
where the confidence maps of the different scales are
not combined, but patches of different sizes are ap-
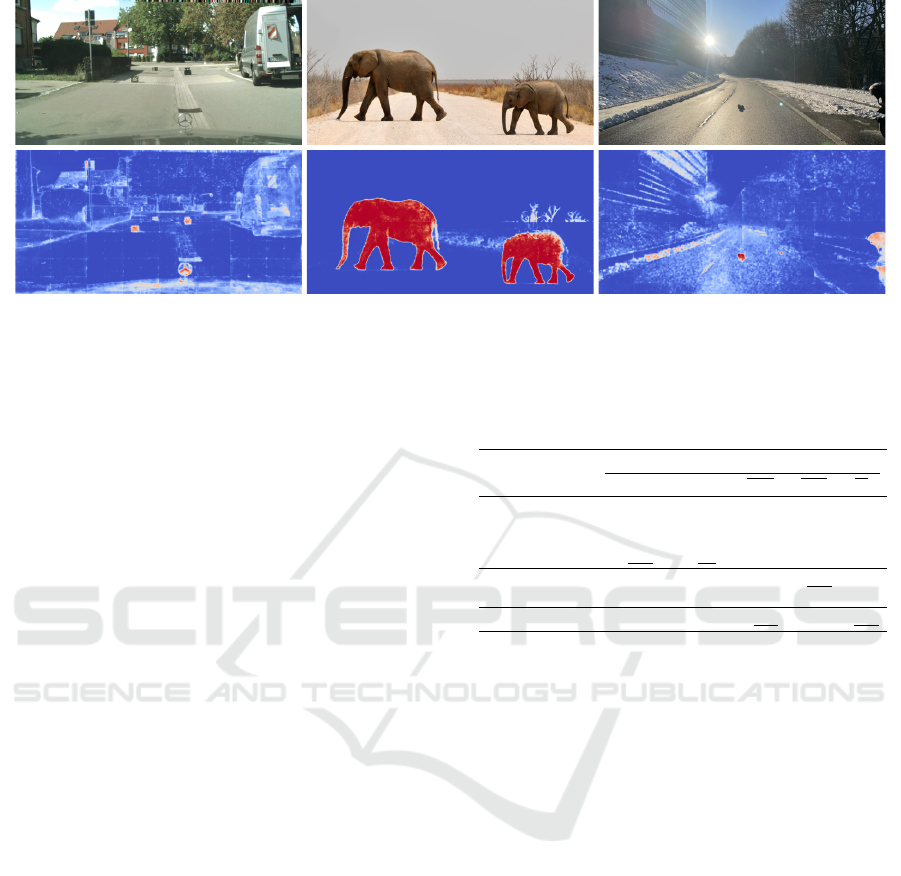
plied in one image. In Figure 4, three different patch
schemes are illustrated. The idea is that the street
Table 7: Non-uniform weightings using confidence maps
with N = 1, 16, 64, 256, 1024.
1 16 64 256 1024
combination 1 0 0.25 0.35 0.2 0.2
combination 2 0 0.3 0.4 0.2 0.1
combination 3 0.2 0.25 0.4 0.1 0.05
combination 4 0.05 0.1 0.4 0.25 0.2
combination 5 0 0.4 0.4 0.2 0
Table 8: OOD segmentation results on the LostAndFound
dataset using different non-uniform combinations of the
confidence maps.
LostAndFound test-NoKnown
AuPRC ↑ FPR
95
↓ sIoU ↑ PPV ↑ F
1
↑
16+64+256+1024 56.5 10.6 32.2 22.5 19.5
combination 1 56.3 11.0 30.6 24.2 20.1
combination 2 55.7 11.6 28.2 26.0 20.2
combination 3 55.0 12.9 24.9 23.2 18.0
combination 4 55.0 10.4 31.5 22.3 18.7
combination 5 54.3 12.5 28.0 23.2 19.2
Table 9: OOD segmentation results on the LostAndFound
dataset using patches of different sizes in one image.
LostAndFound test-NoKnown
AuPRC ↑ FPR
95
↓ sIoU ↑ PPV ↑ F
1
↑
16+64+256+1024 56.5 10.6 32.2 22.5 19.5
patch scheme a 28.8 37.5 15.6 20.5 7.3
patch scheme b 37.3 27.6 19.5 20.4 11.5
patch scheme c 31.3 24.0 23.1 16.2 8.8
scenes always resemble each other and the closer the
objects are to the ego-car, the larger they are. The
corresponding results are given in Table 9. We do not
observe any improvement compared to the baseline,
i.e., the uniform combination of different confidence
maps.
In Table 10, the results for the RoadAnomaly21
and the RoadObstacle21 dataset for different number
of patches N as well as combinations of these confi-
dence maps, and both in combination with the entropy
heatmap obtained by the semantic segmentation net-
work are shown. For both datasets, the entropy un-
certainty heatmap cannot enhance the OOD segmen-
tation performance.
Multi-Scale Foreground-Background Confidence for Out-of-Distribution Segmentation
495
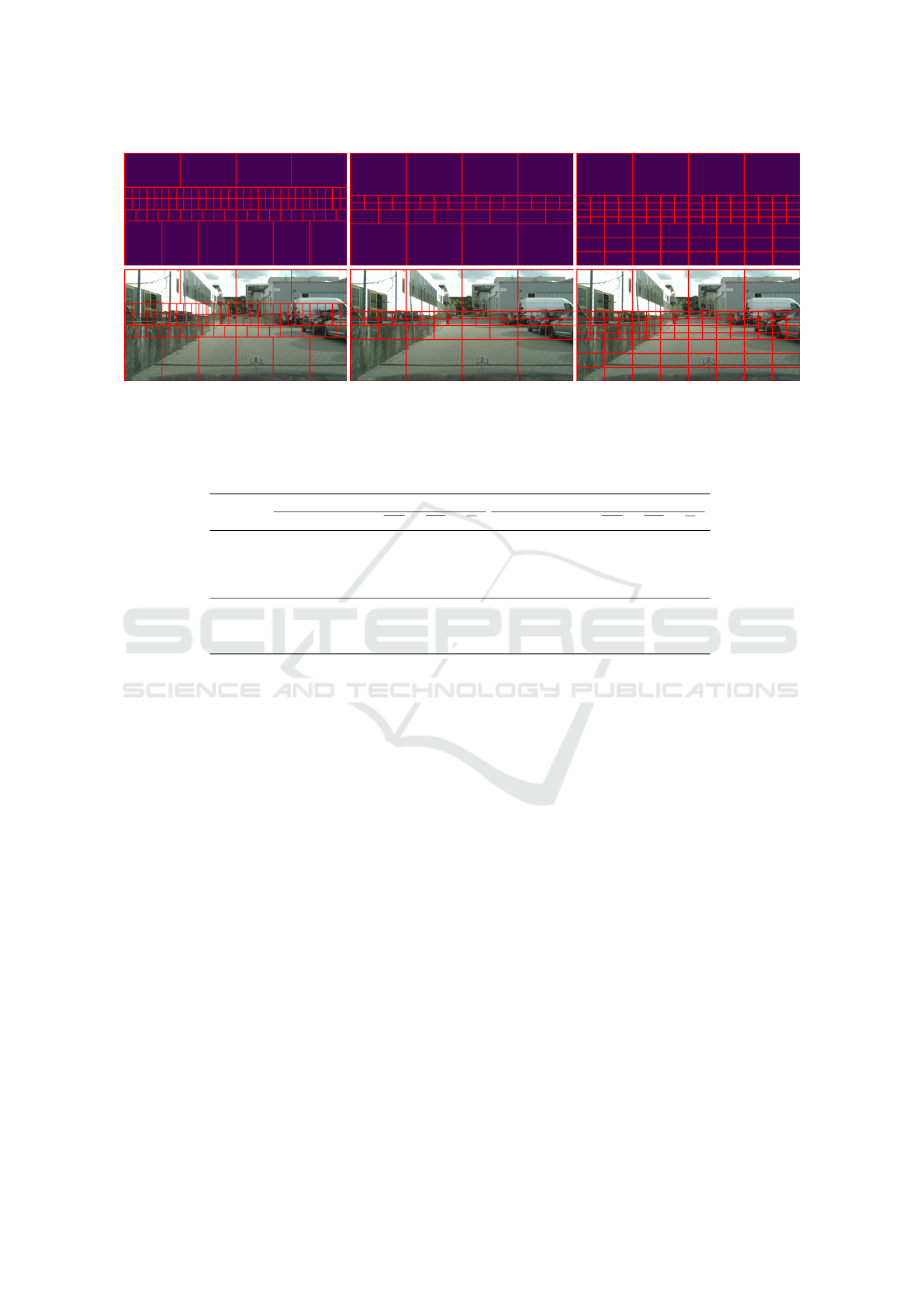
(a) Patch scheme a (b) Patch scheme b (c) Patch scheme c
Figure 4: Three different patch schemes applied to the LostAndFound dataset.
Table 10: OOD segmentation results on the RoadAnomaly21 and the RoadObstacle21 dataset with different number of
patches N as well as combinations of these confidence maps, and both in combination with the entropy heatmap obtained by
the semantic segmentation network.
RoadAnomaly21 RoadObstacle21
AuPRC ↑ FPR
95
↓ sIoU ↑ PPV ↑ F
1
↑ AuPRC ↑ FPR
95
↓ sIoU ↑ PPV ↑ F
1
↑
1 77.3 11.8 39.1 11.7 4.2 45.6 10.7 17.7 18.3 8.5
4 73.0 16.0 44.8 10.4 4.0 54.7 7.8 22.5 21.5 13.2
16 67.4 25.1 52.8 9.9 3.2 50.2 5.2 24.0 20.5 13.1
64 60.9 37.4 51.7 8.3 2.2 46.6 22.0 25.9 22.0 13.3
256 44.3 60.2 38.2 9.4 1.0 35.0 44.0 27.4 15.8 7.9
1+4 76.0 12.7 43.7 11.3 4.4 55.9 8.5 22.9 23.0 14.1
1+4+16 74.7 14.5 47.8 9.8 3.9 57.9 7.2 26.4 20.1 14.7
1+4+16+64 73.2 16.1 48.1 8.0 3.3 58.2 6.4 27.3 24.1 16.9
16+64+256 62.7 28.0 47.4 7.3 1.9 51.8 5.5 28.5 24.5 16.4
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
496
