
Occupant Activity Recognition in IoT-Enabled Buildings:
A Temporal HTN Planning Approach
Ilche Georgievski
a
Service Computing Department, IAAS, University of Stuttgart, Universitaetsstrasse 38, Stuttgart, Germany
Keywords:
Activity Recognition, HTN Planning, Plan and Goal Recognition, Smart Buildings, Internet of Things.
Abstract:
Given that people spend most of their time indoors, it is imperative that buildings maintain optimal well-being
for occupants. To achieve this, research must prioritise occupants over buildings themselves. IoT-enabled
buildings can improve quality of life by understanding and responding to occupant’s behaviour. This requires
recognising what occupants are doing based on IoT data, particularly by considering the objects they use in
specific building areas. Situated within the realm of plan and goal recognition as planning, we propose a
novel knowledge-engineering approach to occupant activity recognitions leveraging temporal HTN planning.
Our approach consists of two primary processes: generating problem instances from IoT data and engineering
HTN domain models for activity recognition. The first ensures the representation of IoT data using planning
constructs, while the second integrates knowledge about occupant activities into HTN domain models. To
support our approach, we provide two HTN domain models tailored for workspaces and homes. Experimental
validation with the latter domain and a real-world dataset show that the quality of our computed solutions
surpasses that of baseline data-driven approaches and is comparable to more advanced, hybrid approaches.
1 INTRODUCTION
The need for indoor environments that prioritise occu-
pant well-being has become critical, as people spend
the majority of their time indoors (Klepeis et al.,
2001; Matz et al., 2015). This demand is further
intensified by factors such as the growing emphasis
on sustainability like carbon awareness, demographic
shifts like an ageing population, and the rise of hy-
brid working models. In response, buildings, such
as homes and workspaces, are being equipped with
advanced technologies, including Internet of Things
(IoT) devices and Artificial Intelligence (AI) func-
tionality. These innovations enable real-time moni-
toring and dynamic control of buildings. However,
to truly enhance occupant well-being, the focus must
shift from merely optimising the buildings themselves
to supporting the occupants (Awada et al., 2021). This
also includes understanding occupants’ activities as
informed by buildings’ IoT data, introducing the chal-
lenge of occupant activity recognition.
Occupant activity recognition is essential for cre-
ating buildings responsive to the needs of occu-
pants (Nguyen and Aiello, 2013). However, exist-
a
https://orcid.org/0000-0001-6745-0063
ing approaches to this problem have significant lim-
itations. Data-driven methods, while powerful, de-
mand big data and often struggle with generalisation
to unseen scenarios (Chen et al., 2021). Conversely,
knowledge-based techniques, such as ontological rea-
soning, involve complex modelling (Uschold and
Gruninger, 1996), may lack adaptability and scalabil-
ity (Sirin et al., 2007), and have difficulty with tem-
poral reasoning (Riboni et al., 2011). Despite the va-
riety of available methods, a gap persists in having
approaches that generalise across buildings and offer
structured and adaptable integration of activities.
One promising avenue for addressing this chal-
lenge lies in the area of Plan and Goal Recognition
(PGR) (Sukthankar et al., 2014; Van-Horenbeke and
Peer, 2021). PGR involves inferring an agent’s plans
and goals based on observed actions, typically rely-
ing on a plan library or domain theory. Notably, the
approach known as PGR as planning (Ram
´
ırez and
Geffner, 2009) has shown potential by leveraging do-
main theory and AI planners to solve PGR problems.
This approach offers high expressiveness, support for
adaptable knowledge representations, the use of off-
the-shelf tools, and ability to operate without big data.
Building on the strengths of PGR as planning, we
propose an approach to occupant activity recognition
956
Georgievski, I.
Occupant Activity Recognition in IoT-Enabled Buildings: A Temporal HTN Planning Approach.
DOI: 10.5220/0013241900003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 3, pages 956-966
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

based on PGR as Hierarchical Task Network (HTN)
planning (H
¨
oller et al., 2018). Unlike PGR as plan-
ning that uses action-based domain theory, our ap-
proach employs HTNs as a domain theory to capture
occupant activity recognition at multiple levels of ab-
straction in a structured fashion. HTN planning is also
known for its computational efficiency and scalability,
making it well-suited for the challenges of buildings.
Specifically, we propose a novel knowledge-
engineering approach to framing occupant activity
recognition as a temporal HTN planning problem.
This approach consists of two key processes. One in-
volves developing HTN domain models that encapsu-
late a hierarchical structure of tasks that describe oc-
cupant activities via involved objects and associated
IoT devices, and general mechanisms for handling
IoT data. The other outlines the integration of IoT
data as temporal facts in the initial state of problem
instances. The solution to this planning problem is a
set of activities, with start and end times, recognised
across different locations within a given building.
Our main contributions are as follows:
• We propose a novel framing of occupant activ-
ity recognition as a temporal HTN planning prob-
lem. This framing focuses on addressing the com-
plexity of building environments, including hi-
erarchical relationships, temporal properties, and
IoT data integration.
• We introduce a knowledge-engineering approach
that enables the application of HTN planning for
occupant activity recognition. This approach en-
sures guided transformation of domain knowledge
into a domain model and clear definition of goals
and states within problem instances, essential for
the success of planning (Bhatnagar et al., 2022).
These problem-formulation challenges are partic-
ularly pronounced in realistic applications, where
dynamic conditions require solutions to be gener-
ated in real time, as opposed to being derived from
simplified or pre-generated benchmarks.
• Our work extends the application of PGR as
HTN planning beyond its previous contexts, e.g.,
driver and office activity recognition (Fernandez-
Olivares and Perez, 2020; Georgievski, 2022), to
varied buildings. This also contributes to the gen-
eralisation gap in the literature, making our work
unique in its focus on cross-domain application.
• By following our approach, we develop HTN do-
main models designed explicitly for occupant ac-
tivity recognition in two common building types:
workspaces and homes. Their design allows for
application in various settings, from case studies
to large-scale environments, offering scalability
and adaptability. These domain models can serve
as a basis for further research and development.
• We show the efficiency of our approach using the
Homes domain, a real-world dataset, and an exist-
ing HTN planner. Our preliminary results show
improvements over baseline data-driven meth-
ods and comparable performance to hybrid ap-
proaches, highlighting the potential of our work.
The rest of the paper is organised as follows.
Section 2 describes the occupant activity recogni-
tion problem. Section 3 offers a brief overview of
temporal HTN planning. Section 4 introduces our
knowledge-engineering approach, and Section 5 gives
insights into the two domain models and the prelimi-
nary evaluation. Sections 6 and 7 present related work
and conclusions, respectively.
2 OCCUPANT ACTIVITY
RECOGNITION
We outline key concepts for occupant activity recog-
nition, focusing on their relevance to engineering
domain models and problem instances. While this
overview covers essential aspects, formalising occu-
pant activity recognition and its correspondence to
HTN planning is beyond this scope and can be found
elsewhere, e.g., (Georgievski, 2022).
We consider buildings equipped with IoT sensors
for real-time monitoring and data collection. Sen-
sors report readings whenever changes occur in the
observed space or at regular intervals via a pub-
lish/subscribe mechanism (Al-Masri et al., 2020).
The readings can be binary data (e.g., on/off states)
or numeric data (e.g., humidity values). To determine
whether numeric sensors are active or not, threshold
values are employed (Nguyen et al., 2014). Thresh-
olds can be absolute (the minimum detectable value),
or dynamic (varying based on spatial and usage char-
acteristics).
Buildings are organised into locations, each con-
taining IoT devices. Occupants perform various ac-
tivities within these locations, with an activity area
being a logical space where specific activities oc-
cur (Curry, 1996). Ergo, spatial relationships emerge,
linking sensors or activities to locations. The type of
activity is often dictated by occupants’ location. That
is, the type of location and objects with which occu-
pants interact – explicitly and implicitly – can con-
strain their activities (Liao et al., 2005; Wu et al.,
2007). When these objects are associated with sen-
sors, each type of occupant activity can be defined in
terms of the relevant sensors deployed in a specific
Occupant Activity Recognition in IoT-Enabled Buildings: A Temporal HTN Planning Approach
957

activity area. For example, the definition of “Work-
ing with a computer” might involve sensors on a com-
puter, keyboard, mouse, and chair.
Occupant’s mere presence in a location, with or
without engaging in anything specifically, represents
the most fundamental occupant activity, called “Pres-
ence”. Part of this means that performing a specific
activity in some location also entails the “Presence”
activity. For example, the activity ‘Working” per-
formed in some location also requires being present.
“Working” can be further refined into sub-activities,
such as “Working with a computer” and “Reading”,
revealing hierarchical relationships among the activ-
ities. Conversely, understanding when people do not
occupy some location holds significance (e.g., energy
saving). We can interpret this situation as a com-
plementary type of activity called “Absence”, which
can also indicate that no activity takes place (Nguyen
et al., 2014). “Absence” exists at the same hierarchi-
cal level as “Presence”, indicating that an activity in a
location can be either presence-based or “Absence”.
Occupant activity recognition entails processing
temporal readings of sensors associated with ob-
jects that occupants interact with while performing
presence-based activities in specific locations at spe-
cific times. Recognised activities must conform to
a predefined set of relevant objects deployed in spe-
cific locations and readings of sensors associated with
those objects at specific time points. Thus, the occu-
pant activity recognition problem can be defined as
follows: Given a building with locations and sensors
characterised by thresholds and spatial properties,
and a set of possible occupant activities with hierar-
chical relationships and described by sensors linked
to relevant objects, determine the set of activities oc-
curring in all activity areas consistent with the prede-
fined activities and temporal readings.
3 BACKGROUND
We approach occupant activity recognition as state-
based HTN planning (Georgievski and Aiello, 2015).
A central construct is a task network, which is a hi-
erarchy of primitive and compound tasks. Primitive
tasks are executable actions, whereas the latter en-
capsulate domain knowledge that extends beyond ac-
tions. These compound tasks are decomposable into
subtasks using methods. An objective is modelled
as an initial task network that should be decomposed
starting from an initial state using the task hierarchy.
The solution is a course of action executable in the
initial state.
Building on this standard concept, temporal HTN
planning integrates time into the state and tasks. We
focus on this integration as captured by the Hierar-
chical Domain Definition Language (HPDL), as de-
signed for the SIADEX planner (Castillo et al., 2006).
HPDL builds upon the Planning Domain Definition
Language (PDDL) (McDermott et al., 1998), where
primitive and compound tasks along with their de-
composition methods are directly mapped into HPDL
elements. Beyond the standard HTN constructs and
derived predicates, HPDL incorporates a temporal di-
mension that aligns with PDDL 2.1 level 3 (e.g., tem-
poral facts). HPDL also introduces several special
features, which are instrumental in our knowledge-
engineering approach. These include the modelling
of temporally constrained task, incorporation of an in-
ference task, and use of the bind predicate.
• Temporal facts are timed initial literals or facts
with time points. For example, the fact
(timestamp "30/11/2023 09:31:32" 0) en-
codes a sensor reading’s timestamp with index 0.
• Temporally constrained task is a task in a
method’s subtasks that comes with temporal con-
straints over its start and end points and duration.
For this, three special variables are used, ?start,
?end and ?dur, and a logical expression with re-
lational operators for the constraints.
• Inference task is a task that can appear in
a method’s subtasks to add or remove new
facts into the current state without an ex-
plicit action invocation or capture informa-
tion from the current state. This task is of
the form :inline <precondition> <effect>,
where precondition and effects are usual logical
expressions as defined for an action’s precondi-
tions and effects.
• The bind predicate is used to bind a variable
by evaluating an expression. It is of the form
(bind <var> <expression>).
4 THE APPROACH
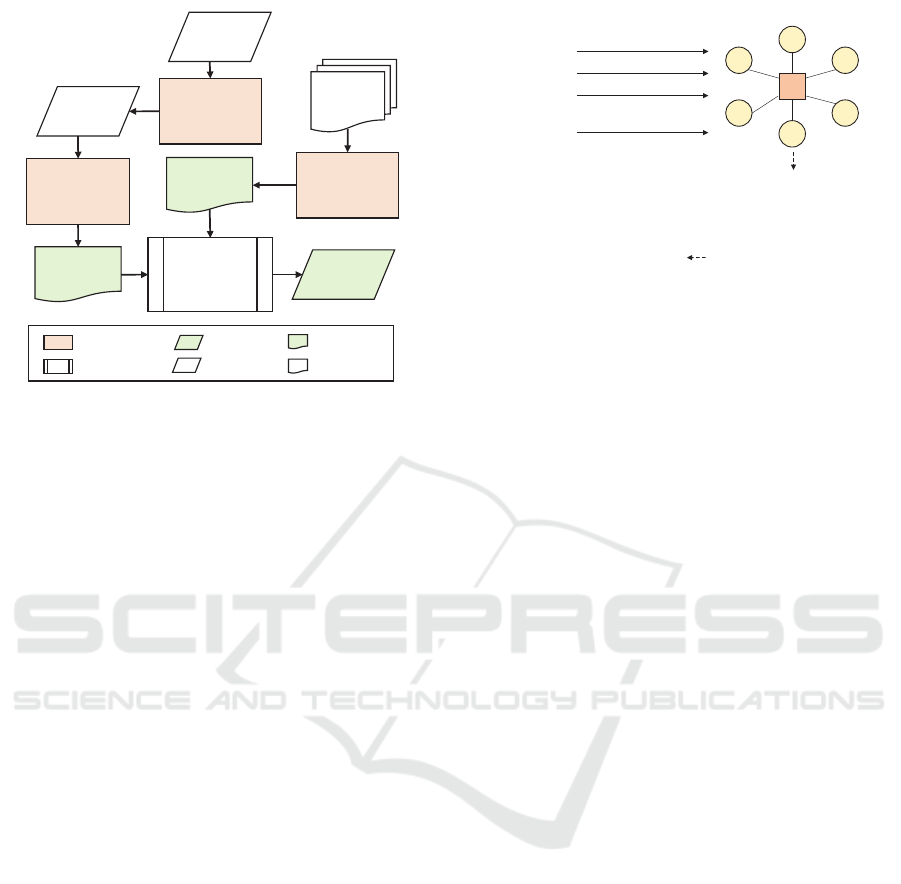
Figure 1 illustrates our approach to occupant activ-
ity recognition, which consists of two main processes:
problem instance generation from sensor data and en-
gineering domain models for activity recognition. In
the first process, problem instances in HPDL are gen-
erated by converting raw sensor readings into indexed
temporal observations, which are then transformed
into indexed facts for the initial state of an HPDL
problem instance. The concept of indexing draws in-
spiration from (Fernandez-Olivares and Perez, 2020).
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
958
Problem
Instance
Generation
Plan
Generation
Engineering
Domain Models
Indexed Facts
Generation
Activity types,
properties
and objects
Proposed Process
Existing Process
Input Data
Output document
Facts
Sensor
Readings
HPDL Problem
Instance
HPDL Domain
Model
Recognised
Activities
Output Data
Input knowledge
Figure 1: Flowchart representing the approach for occupant
activity recognition as HTN planning.
The second process involves acquiring knowledge
about relevant activities and engineering it into an
HPDL domain model. This includes insights about
activities, their properties, and involved objects from
prior experience, existing activity models, and litera-
ture. We represent activities as primitive tasks. When
a specific activity occurs at some location, the corre-
sponding primitive task is added to the plan. Since
activities can last for specific periods, the plan’s tasks
are annotated with start and end times. This requires
aligning the temporal points of primitive tasks with
sensor timestamps (C1) and ensuring no temporal
conflicts between tasks in the plan, allowing for par-
allel activities at different locations (C2). The HTN
domain model is responsible for achieving condition
C1, while plan generation ensures C2.
These processes provide the inputs for the plan
generation, which is executed by a temporal HTN
planner, resulting in a plan of temporally annotated
activities recognised in locations within the building.
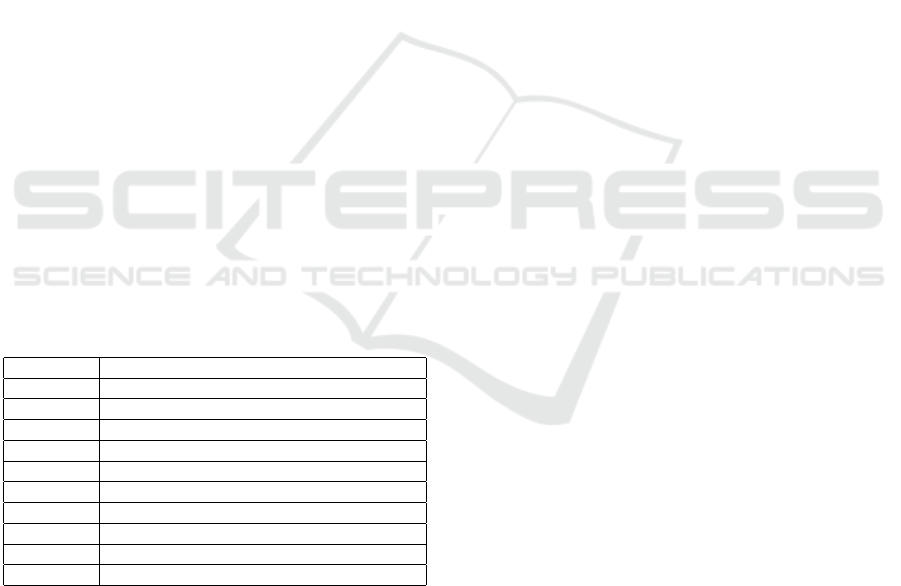
4.1 Indexed Facts Generation
We assume that raw sensor readings are gathered via
a standard IoT publish/subscribe mechanism, where
sensors send their readings to topics managed by a
message broker, see Figure 2. These readings are
stored in the order they are received, allowing for re-
trieval in the same sequence.
Each sensor reading includes the value and times-
tamp, which are translated into an indexed temporal
observation. An indexed temporal observation is a
tuple (sID, sVal, rTimestamp, idx), where sID is the
sensor’s unique identifier, sVal is the sensor reading
value, rTimestamp is the reading’s timestamp, and idx
x
…
y
z
…
…
sensor:s1 topic:x value:1
sensor:s2 topic:y value:250
sensor:s3 topic:y value:125
sensor:sN topic:z value:0
…
30/11/2023 09:31:34
30/11/2023 09:31:52
30/11/2023 17:07:27
(s1 1 “30/11/2023 09:31:34” 0)
(s2 250 “30/11/2023 09:31:52” 1)
(s2 125 “30/11/2023 09:31:52” 1)
(sN 0 “30/11/2023 17:07:27” k)
…
(reading s1 1 0)
(timestamp “30/11/2023 09:31:34” 0)
(reading s2 250 1)
(reading s3 125 1)
(timestamp “30/11/2023 09:31:52” 1)
(reading sN 0 k)
(timestamp “30/11/2023 17:07:27” k)
…
Sensors Message Broker
Indexed Temporal Observation
Indexed HPDL Facts
Figure 2: Process of transforming sensor readings to in-
dexed temporal observations and generating HPDL facts.
is the reading’s position in the sequence.
Observing the correct order of sensor readings is
crucial for accurate activity recognition. If readings
are processed out of order, it can lead to incorrect in-
ferences about activities. For example, if the plan-
ner first processes the PC is turned on at time t and
then the monitor is on at time t
′
, it might incorrectly
conclude the occupant is working on the PC, even if
the PC was turned off between t and t
′
. Indexing en-
sures sensor readings are handled in strict sequence,
enabling accurate reasoning.
To represent an indexed temporal observation,
we use standard and temporal facts in HPDL. Fig-
ure 2 illustrates how sensor readings are translated
into HPDL facts. For example, at time 30/11/2023
09:31:54, sensors s2 and s3 report readings simul-
taneously on topic y, so their observations share the
same timestamp and index. These are then translated
into standard predicates for each reading and a tem-
poral fact linking the timestamp to the reading index.
4.2 Engineering Domain Models
We now outline the general process for engineering
HPDL domain models capable of performing occu-
pant activity recognition. This includes the represen-
tation of relevant objects, the modelling of mecha-
nisms for manipulating sensor readings, and the rep-
resentation of occupant activities.
4.2.1 Representing Sensors, Locations, and
Activities
The main types of objects within living spaces related
to user activities are sensors, locations, and activities.
These are represented as types at the highest level of
the typing hierarchy in HPDL. We can then define
subtypes using these types. Since sensors can be bi-
Occupant Activity Recognition in IoT-Enabled Buildings: A Temporal HTN Planning Approach
959

nary or numeric, we define their corresponding types
as subtypes of the sensor type. Each sensor can be
defined using these two types; for example, a moni-
tor is a binary sensor, and a chair pressure sensor is a
numeric one.
To represent sensor locations, sensor readings, and
sensor status, we define a set of predicates, some of
which are shown in Figure 2. Other predicates in-
clude (sensorAt ?s - sensor ?l - location)
and (active ?s - sensor).
To infer useful information from the basic pred-
icates, we define several derived predicated. Partic-
ularly, (isBinary ?s) and (isNumeric ?s) enable
determining the type of a sensor when the sensor su-
pertype is passed as a parameter. Also, we define
(existsActiveSensor ?l - location) to deter-
mine whether there is any active sensor at a location.
For the representation of the current ongo-
ing activity and its start time, we employ two
predicates. The first one takes the location and
name of the current activity as arguments, whereas
the second one takes the location and start time:
(currentAct ?l - location ?a - activity),
(startAct ?l - location ?time - number).
To infer location types, we propose a straight-
forward representation requiring the specification of
one predicate per location in the form (is roomType
?l - roomType). For example, if the location is a
working room, then the location type inferring predi-
cate is (isWorkingRoom ?l - workingRoom), with
workingRoom defined under the location type.
4.2.2 Representing the Indexing Concept
To represent and infer the current index, we use
a derived predicate, (idx ?i - number). How-
ever, to get the last index in the sequence of
sensor readings in some location, we need an addi-
tional derived predicate (lastIdx ?i - number).
Since these predicates depend on numeric vari-
ables, we need functions to generate their values,
(currentIdx) and (lastIdx). To tie the de-
rived predicates and functions together, we employ
the bind predicate to link i to the value of the
current index in the sequence of sensor readings:
(:derived (idx ?i) (bind ?i (curIdx))).
Similarly for the last index.
4.2.3 Representing the Changing Threshold
Concept
To address the concept of changing threshold, we use
a predicate and a function. The predicate, taking the
numeric sensor, the new threshold value, and the in-
dex as parameters, represents the updated value of
the threshold for a given sensor. When a sensor’s
threshold gets changed, this predicate needs to be in-
serted at the same or before the index of the sen-
sor readings related to this threshold. The function
(threshold ?s - numeric) is used to associate the
threshold of a numeric sensor with a numeric value.
4.2.4 Representing a Recognised Activity
For the representation of recognised activities,
we propose using one primitive task, specifically
the action recognised activity with two param-
eters for the activity location and type. The
action has start and endpoints but has no pre-
conditions and effects. As this action is the only
primitive task, the activities recognised in a lo-
cation represent a temporally ordered sequence
of (:action recognisedActivity ?l ?a) in-
stances. Hence, for each a and a
′
at l
i
, where
a is added before a
′
in the sequence, it follows
end(a) ≤ start(a
′
). Consequently, a plan is a se-
quence of instances of this action ordered by location,
i.e., the first subsequence of actions is for location
l
i
, the next subsequence for location l
i+1
, and so on,
aligning with the order of locations provided in the
initial task network. In the final plan, for a at l
i
and a
′
at l
j
, no temporal constraints exist between a and a
′
.
4.2.5 Updating Sensor Status
To update the active status of sensors based on their
current readings, we introduce a dedicated compound
task, which distinguishes between binary and nu-
meric sensors and has two methods for each sen-
sor type. For binary sensors, the task activates or
deactivates a sensor when the current sensor read-
ing is 1 or 0, respectively. For numeric sensors,
the logic is more complex yet the outcome re-
mains the same. Specifically, if a numeric sensor’s
reading equals or exceeds its threshold, the sensor
is active. Otherwise, the sensor is inactive. In
all task’s methods, we can employ inference tasks
whose effects consist of either (sensorActive ?s)
or (not (sensorActive ?s)).
4.2.6 Processing Sensor Readings per Location
Recognising occupant activities per location
dictates how sensor readings should be pro-
cessed to identify specific activities. We ad-
dress this with a dedicated compound task,
(:task recogniseActivitiesIn ?l). This
task handles sensor readings at location ?l while
considering dynamic thresholds and temporal infor-
mation at the current index. Four methods realise
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
960

this task. The first captures new threshold values for
numeric sensors at the current index. The second
processes a new sensor reading by invoking the
compound task for updating the sensor status and
then marking the reading as processed using an
inference task. The third method recognises an
activity at a time point corresponding to the current
index, capturing the temporal information of the
current reading in its precondition and triggering
the compound task (recogniseAactivity ?l ?t)
(detailed in the next subsection). Upon recognising
an activity, the method increments the current index,
informing the planner to look at sensor readings at the
next index. These three methods lead to different de-
compositions via their task networks but all end with
a recursive call to (recogniseActivitiesIn ?l).
A fourth method serves as the base case to end
the recursion, applied when the sequence of sensor
readings for that location is complete. This method’s
task network includes three tasks: an inference
task capturing the current activity at ?l (including
its start and end times), then the primitive task
(recognisedActivity ?a ?l), ensuring it fits
within the temporal constraints of the plan (if a
temporal violation occurs, the decomposition would
fail, leading to backtracking; however, since sensor
readings naturally progress in time, this issue can
be resolved by resetting the index), and an inference
task to reset the current index.
4.2.7 Representing the Activity Hierarchy
To systematically recognise a specific activ-
ity, we propose employing a compound task
(recogniseActivity ?l ?t), where ?l is the
location and ?t is the timestamp. This task includes
methods for different types of locations, grouped
into two categories: presence-based activities and
absence. Each method for a presence-based activity
decomposes into a compound task for recognising
activities in a specific type of location. For presence-
based activities, each method decomposes into a
task for recognizing activities in a specific type of
location. For example, in an office building with
three room types, there would be three methods, each
handling presence-based activities for a particular
room type. The “Absence” method checks if all
sensors in the location are inactive, then decomposes
into the task for recognising “Absence”.
4.2.8 Recognising Presence-Based Activities
We can represent the recognition of presence-based
activities at multiple levels of abstraction. At the
highest level, we propose using a compound task with
at least three methods: one for recognising the basic
”Presence” activity, another for continuous recogni-
tion (details in the last subsection), and one for recog-
nising specific activities. For instance, recognising a
meeting in an office might involve methods for pres-
ence, continuous presence, and conducting a meet-
ing. If the method for recognising a specific activ-
ity fails, the process can fall back to identifying pres-
ence. The method for recognising a specific activity
can also lead to further refinement if the activity can
be broken down hierarchically. For example, “Meet-
ing” might be refined into “Having a meeting” and
“Giving a presentation”, each represented by a com-
pound task with its own methods, plus one for contin-
uous recognition. This approach allows for encoding
complex hierarchical relationships as needed. Each
of these methods includes preconditions based on the
active status of relevant sensors at the location. For
example, “Giving a presentation” might require ac-
tive chair pressure, projector, and acoustic sensors. If
a method leads to further abstraction, it decomposes
into the appropriate compound task; otherwise, it de-
composes into a task that marks the beginning of the
current activity and the end of the previous one, en-
suring temporal constraints are met while executing
(recognisedActivity ?l ?a).
4.2.9 Recognising “Absence”
Recognising “Absence” operates under the assump-
tion that none of the sensors deployed at a specific
location are active. This process is encapsulated in a
compound task consisting of two methods. One is re-
sponsible for continuous recognition, while the other
for recognising “Absence” at a given location by de-
composing to the task that marks the beginning and
end of activities.
4.2.10 Recognising Activities Continuously
For each type of activity, at different abstraction lev-
els, a method is needed to handle situations where
an activity is already in progress at a location. This
method, while sharing similar preconditions with oth-
ers, includes the predicate (currentAct ?l ?a).
This design choice allows the planning process to
continue by moving to the next index without adding
the ongoing activity to the plan. When an activity
?a is already in progress, it is stored in the predicate
(currentAct ?l ?a). If a new activity a’ is recog-
nised at the same location, the current activity ?a can
then be added to the plan. The start time of ?a is al-
ready recorded in (startAct ?l ?timepoint), and
its end time is set to when a’ begins. This approach
allows the planning process to accurately assign start
Occupant Activity Recognition in IoT-Enabled Buildings: A Temporal HTN Planning Approach
961

and end times to activities.
4.3 Problem Instances Generation
For the HPDL problem instance, we define sen-
sors and relevant locations as objects. In the ini-
tial state segment, we require initialising the sen-
sor locations, thresholds for numeric sensors, cur-
rent activity at each location to “Absence”, sensor
readings and corresponding timestamps, current in-
dex to 0, and last index to k, where k is the last
index in the sensor readings sequence. In the ini-
tial task network’s segment, we specify the loca-
tions where activities should be recognised using the
(recogniseActivitiesIn ?l) task.
5 DOMAIN MODELS AND
PRELIMINARY EVALUATION
We now present our results. We first give insights into
the two domain models followed by the experimen-
tal setup and experimental results of our preliminary
evaluation.
5.1 The Two Domain Models
Following our approach, we developed two HPDL
domain models: one for recognising activities in
workspaces and another for activities in homes. The
Workspace domain can recognise nine activity types
in three location types, informed by our experience
with living labs and existing knowledge of office ac-
tivities (Nguyen et al., 2014; Georgievski, 2022). The
Homes domain can recognise ten activity types in five
location types, drawing on our experience and exist-
ing knowledge of home activities (Naeem et al., 2007;
van Kasteren et al., 2011). Both domains are designed
to be generic and flexible, supporting typical activi-
ties in workspaces and homes while allowing for cus-
tomisation. The two domains with sample problem
instances are publicly available on GitHub.
1
5.2 Experimental Setup
Dataset To test our approach with real-world data,
we used a publicly available dataset (Azkune and
Almeida, 2018) of a real home (Kasteren Home
A (van Kasteren et al., 2011)). The home, an apart-
ment of a 26-year-old male, has three rooms equipped
with 14 simple, non-obtrusive sensors. These sensors
collected 1319 readings over 25 different days. The
1
https://github.com/PlanX-Universe/domains
inhabitant annotated his activities using speech recog-
nition via a headset.
Planner. We use the publicly available version of
SIADEX, which is a temporal HTN planner.
2
Modelling Considerations. We use our Homes do-
main model. Since the selected dataset includes only
binary sensor readings, we do not need to account
for numeric sensors or dynamic thresholds. Further-
more, determining when a sensor becomes inactive
(switches from 1 to 0) can be inconsistent, as some
sensors deactivate immediately after activation, while
others remain active for extended periods, making it
difficult to interpret the status change. Thus, for this
experiment, we exclude predicates related to sensor
deactivation and focus solely on activation readings.
Moreover, because the SIADEX’s version does not
support timed initial literals, we use numeric fluents
to represent time (e.g., 93347 for 09:33:47). We also
split the dataset into separate problem instances for
each of the 25 days as we lack timestamps to prevent
temporal violations – the end of the last activity on
one day may occur later than the start of the first ac-
tivity on the following day.
Evaluation Metrics. We evaluate our approach us-
ing standard accuracy metrics: precision, recall, F-
score, and relative gap. To obtain ground truth for
comparison, we label each sensor reading in the
dataset with the activity inferred from the inhab-
itant’s annotations, treating “None” annotations as
“Absence” activities. Since our approach produces
a plan with recognised activities by location, a di-
rect comparison with the labelled ground truth is not
possible. Instead, we re-label the original dataset ac-
cording to the recognised activities in the plans. We
calculate the metrics for each day, with the following
assumptions: if the ground truth contains no activity
instances for a day and our results also show no ac-
tivity, we assign a score of 1 to precision, recall, and
F-score for that activity (i.e., “Absence”). Otherwise,
if our approach labels readings with activities that do
not match the ground truth, we assign a score of 0 to
each metric.
Comparison. We compare our approach with base-
line data-driven techniques, including Naive Bayes
(NB), Hidden Markov Model (HMM), Hidden Semi-
Markov Model (HSMM), and Conditional Random
2
https://github.com/UGR-IntelligentSystemsGroup/
HPDL-Planner
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
962

Field (CRF) (van Kasteren et al., 2011). Addition-
ally, we evaluate it against hybrid or enhanced ap-
proaches that combine data-driven and knowledge-
based techniques, such as ARF (Ihianle et al.,
2018), HARS (Azkune and Almeida, 2018), and US-
MART (Ye et al., 2014).
5.3 Results
Daily precision and recall percentages offer limited
insights, as most activities show inconsistent oscilla-
tion with no clear pattern. The highest and most sta-
ble precision scores are observed for “Using toilet”
and “Preparing breakfast”, while the scores for other
activities fluctuate more widely. Precision for “Leav-
ing house” and “Going to bed” also oscillates, though
less extremely. This variability likely stems from the
fact that each of these activities is identified by a sin-
gle sensor, meaning every activation leads to recog-
nition of the corresponding activity. Irrelevant sensor
activations are common in the dataset, further adding
to these fluctuations. Precision for “Absence” goes
to the extreme, shifting between 1 and 0, indicating
that we either recognise all or none of the non-activity
readings. Recall scores also exhibit oscillation, with
our approach nearly always recognising instances of
“Going to bed” and “Preparing breakfast”. Other ac-
tivities fluctuate between 1 and 0, primarily due to our
convention of assigning 0 or 1 to metrics when they
are not applicable.
Figure 3 shows the average metric percentages.
The highest F-scores were for “Preparing breakfast”
(0.95), “Going to bed” (0.88), and “Leaving house”
(0.85). On the lower end, “Preparing dinner” and
“Getting drink” scored 0.61 and 0.6, respectively,
while ‘Taking shower” and “Absence” scored 0.51
and 0.5. Although “Using toilet” had a high preci-
sion of 0.97, its overall activity recognition rate was
only 59%, leading to an F-score of 0.73.
Our approach effectively distinguishes between
similar activities, such as “Preparing breakfast” and
“Preparing dinner”, due to their distinct times of
day, allowing the planner to check the relevance of
the current timestamp. However, it struggles when
time spans overlap, such as with “Getting drink” and
“Preparing dinner”. Although both activities have
similar F-scores, “Getting drink” has higher preci-
sion, while more instances of “Preparing dinner” are
recognised.
Table 1 shows the comparison between our ap-
proach, marked with an asterisk (*), and baseline
data-driven approaches, ordered by F-score. Our ap-
proach achieved 74.32% precision, 73.6% recall, and
a 73.95% F-score, demonstrating that our knowledge-
Figure 3: Average precision, recall, and F-score per activity.
Table 1: Accuracy comparison with baseline data-driven
approaches on the Kasteren House A dataset.
Approach Precision Recall F-score
NB 67.3% 64.8% 65.8%
CRF 73.5% 68.0% 70.4%
HMM 70.3% 74.3% 72.0%
HSMM 70.5% 75.0% 72.4%
∗ 74.3% 73.6% 73.9%
Table 2: Gap analysis with hybrid approaches using the
Kasteren House A dataset.
Approach USMART HARS HARS
Gap 0.07 3.97 19.5
based approach outperforms traditional data-driven
baselines.
Table 2 shows the F-score gaps between our ap-
proach and more advanced, hybrid approaches. The
gap between our approach and USMART is minimal,
suggesting that our approach is on par with USMART,
despite USMART not accounting for the “None” ac-
tivity. The ability of our approach to recognise “Ab-
sence” gives it an advantage in scenarios where dis-
tinguishing between presence and absence is critical.
The gap with HARS is slightly larger at 3%, indi-
cating that HARS benefits from its combination of
data-driven and knowledge-based techniques but only
marginally outperforms our approach. However, the
19% gap between our approach and ARF highlights
ARF’s superior performance, likely due to its effec-
tive integration of ontological reasoning with classi-
fication models. This gap points out to the potential
benefits of further enhancing our approach by incor-
porating data-driven strategies.
6 RELATED WORK
The research on this topic can be broadly categorised
into two main streams: activity recognition and plan
and goal recognition (Sukthankar et al., 2014; Van-
Occupant Activity Recognition in IoT-Enabled Buildings: A Temporal HTN Planning Approach
963

Horenbeke and Peer, 2021). Activity recognition
focuses on discovering meaningful human activities
from potentially noisy, low-level sensor data. This
problem has been addressed using both data-driven
and knowledge-based approaches. Data-driven meth-
ods rely on large datasets for training and feature
engineering while exhibiting variable prediction ac-
curacy and poor generalisation (Jobanputra et al.,
2019; Minh Dang et al., 2020; Chen et al., 2021).
Knowledge-based approaches, on the other hand, for-
malise activity models using prior knowledge and ap-
ply reasoning to detect activities, achieving reason-
able accuracy but struggle with temporal constraints,
uncertainty, scalability, and adaptability (Chen et al.,
2008; Riboni et al., 2011; Chen et al., 2011; Nguyen
et al., 2014).
Plan and goal recognition focuses on identify-
ing high-level goals and plans to reach goals by ob-
serving agents’ primitive actions. A common ap-
proach involves using plan libraries to represent pos-
sible plans to be recognised in various domains, such
as homes (Simpson et al., 2006; Bouchard et al.,
2006). Some studies also consider the temporal prop-
erties of recognised plans, e.g., (Levine and Williams,
2014). A notable approach is PGR as planning, where
an agent’s behaviour is represented in domain the-
ory (Ram
´
ırez and Geffner, 2009). Like our work,
PGR as planning relies on domain models, typically
STRIPS-based (Ram
´
ırez and Geffner, 2009; Sohrabi
et al., 2016) and recently non-temporal HTNs (H
¨
oller
et al., 2018). Although domain-independent, these
proposals lack expressiveness needed to capture the
nuances of occupant activity recognition and do
tackle the knowledge-engineering aspect.
HTN planning has been applied to recognise and
label sequences of divers’ activities using event logs
according to hours of service regulations (Fernandez-
Olivares and Perez, 2020). In this approach, ini-
tial observations correspond to events in a driver’s
log, and service regulations are translated into a
temporal HTN domain to identify driving activi-
ties, resulting in plans as interpretable labelled event
logs. Also, HTN planning has been used for ac-
tivity recognition in offices, though without tackling
the domain-engineering problem and temporal prop-
erties (Georgievski, 2022).
Our work parallels runtime verification in plan-
ning, which studies whether observed plan execu-
tions meet intended plan semantics (Bensalem et al.,
2014), and conformance checking in process mining,
which studies whether business process executions,
as recorded in event logs, conform to process mod-
els (van der Aalst, 2011). We go beyond verifying
activities against sensor readings by identifying spe-
cific activities and generating plans that interpret sen-
sor readings as activities with start and end times.
7 CONCLUSIONS
Enabling buildings to support occupants and their
well-being requires placing occupants in the centre of
their operation and recognising occupants’ behaviour.
We propose a novel framing of occupant activity
recognition as temporal HTN planning and a new
domain-engineering approach for designing HTN do-
main models and problem instances that effectively
capture the essential aspects of occupant activities and
IoT data processing. We also developed HTN do-
main models for workspaces and homes, demonstrat-
ing both the applicability of our approach and its abil-
ity to address real-world challenges in occupant activ-
ity recognition. Our work emphasises the importance
of problem formulation in AI planning, extending be-
yond traditional benchmark problem generation. The
efficiency of our proposal was validated using the
Homes domain on a real dataset, showing high preci-
sion and recall for specific activities, and competitive
performance compared to other approaches.
Future research will focus on refining HTN do-
main models to capture more nuanced activities, in-
corporating additional IoT data, and expanding our
approach to diverse environments, such as assisted
living facilities. Integrating machine learning tech-
niques and large language models could further en-
hance accuracy and adaptability to occupant be-
haviours. For example, the integration of HTN plan-
ning as a classifier into the training process of data-
driven approaches is an interesting direction for ex-
ploring performance benefits.
ACKNOWLEDGEMENTS
I thank Ivaylo Spasov for his contributions to the work
that forms the foundation of this paper.
REFERENCES
Al-Masri, E., Kalyanam, K. R., Batts, J., Kim, J., Singh,
S., Vo, T., and Yan, C. (2020). Investigating Messag-
ing Protocols for the Internet of Things (IoT). IEEE
Access, 8:94880–94911.
Awada, M., Becerik-Gerber, B., Hoque, S., O’Neill, Z.,
Pedrielli, G., Wen, J., and Wu, T. (2021). Ten ques-
tions concerning occupant health in buildings dur-
ing normal operations and extreme events including
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
964

the covid-19 pandemic. Building and Environment,
188:107480.
Azkune, G. and Almeida, A. (2018). A Scalable Hybrid
Activity Recognition Approach for Intelligent Envi-
ronments. IEEE Access, 6:41745–41759.
Bensalem, S., Havelund, K., and Orlandini, A. (2014). Ver-
ification and Validation Meet Planning and Schedul-
ing. International Journal on Software Tools for Tech-
nology Transfer, 16(1):1–12.
Bhatnagar, S., Mund, S., Scala, E., McCabe, K., Mc-
Cluskey, T. L., and Vallati, M. (2022). On-the-Fly
Knowledge Acquisition for Automated Planning Ap-
plications: Challenges and Lessons Learnt. In Inter-
national Conference on Agents and Artificial Intelli-
gence, pages 387–397.
Bouchard, B., Giroux, S., and Bouzouane, A. (2006).
A Smart Home Agent for Plan Recognition of
Cognitively-impaired Patients. Journal of Compuers.,
1(5):53–62.
Castillo, L., Fdez-Olivares, J., Garc
´
ıa-P
´
erez, O., and Palao,
F. (2006). Efficiently Handling Temporal Knowledge
in an HTN Planner. In International Conference on
Automated Planning and Scheduling, pages 63–72.
Chen, K., Zhang, D., Yao, L., Guo, B., Yu, Z., and Liu,
Y. (2021). Deep Learning for Sensor-Based Human
Activity Recognition: Overview, Challenges, and Op-
portunities. ACM Computing Surveys, 54(4).
Chen, L., Nugent, C. D., Mulvenna, M., Finlay, D., Hong,
X., and Poland, M. (2008). A Logical Framework
for Behaviour Reasoning and Assistance in a Smart
Home. International Journal of Assistive Robotics
and Mechatronics, 9(4):20–34.
Chen, L., Nugent, C. D., and Wang, H. (2011). A
Knowledge-driven Approach to Activity Recognition
in Smart Homes. IEEE Transactions on Knowledge
and Data Engineering, 24(6):961–974.
Curry, M. R. (1996). The Work in the World: Geographical
Practice and the Written Word. University of Min-
nesota Press.
Fernandez-Olivares, J. and Perez, R. (2020). Driver Activity
Recognition by Means of Temporal HTN Planning. In
International Conference on Automated Planning and
Scheduling, pages 375–383.
Georgievski, I. (2022). Office Activity Recognition Using
HTN Planning. In IEEE International Conference on
Signal Image Technology & Internet-Based Systems,
pages 70–77.
Georgievski, I. and Aiello, M. (2015). HTN Planning:
Overview, Comparison, and Beyond. Artificial Intel-
ligence, 222(0):124–156.
H
¨
oller, D., Behnke, G., Bercher, P., and Biundo, S. (2018).
Plan and Goal Recognition as HTN Planning. In IEEE
International Conference on Tools with Artificial In-
telligence, pages 466–473.
Ihianle, I. K., Naeem, U., Islam, S., and Tawil, A.-R.
(2018). A Hybrid Approach to Recognising Activities
of Daily Living from Object Use in the Home Envi-
ronment. Informatics, 5(1).
Jobanputra, C., Bavishi, J., and Doshi, N. (2019). Human
Activity Recognition: A Survey. Procedia Computer
Science, 155:698–703.
Klepeis, N. E., Nelson, W. C., Ott, W. R., Robinson, J. P.,
Tsang, A. M., Switzer, P., Behar, J. V., Hern, S. C.,
and Engelmann, W. H. (2001). The National Human
Activity Pattern Survey (NHAPS): a resource for as-
sessing exposure to environmental pollutants. Jour-
nal of exposure science & environmental epidemiol-
ogy, 11(3):231–252.
Levine, S. and Williams, B. (2014). Concurrent Plan Recog-
nition and Execution for Human-Robot Teams. In In-
ternational Conference on Automated Planning and
Scheduling, pages 490–498.
Liao, L., Fox, D., and Kautz, H. A. (2005). Location-Based
Activity Recognition using Relational Markov Net-
works. In International Joint Conference on Artificial
Intelligence, volume 5, pages 773–778.
Matz, C. J., Stieb, D. M., and Brion, O. (2015). Urban-
rural differences in daily time-activity patterns, occu-
pational activity and housing characteristics. Environ-
mental Health, 14:1–11.
McDermott, D., Ghallab, M., Howe, A., Knoblock, C.,
Ram, A., Veloso, M., Weld, D., and Wilkins, D.
(1998). PDDL - The planning domain definition lan-
guage. Tech. Rep. CVC TR-98-003/DCS TR-1165,
Yale Center for Computer Vision and Control.
Minh Dang, L., Min, K., Wang, H., Jalil Piran, M., Hee Lee,
C., and Moon, H. (2020). Sensor-Based and Vision-
Based Human Activity Recognition: A Comprehen-
sive Survey. Pattern Recognition, 108:107561.
Naeem, U., Bigham, J., and Wang, J. (2007). Recognis-
ing activities of daily life using hierarchical plans. In
European Conference on Smart Sensing and Context,
pages 175–189.
Nguyen, T. A. and Aiello, M. (2013). Energy intelligent
buildings based on user activity: A survey. Energy
and buildings, 56:244–257.
Nguyen, T. A., Raspitzu, A., and Aiello, M. (2014).
Ontology-Based Office Activity Recognition with Ap-
plications for Energy Savings. Journal of Ambient In-
telligence and Humanized Computing, 5(5):667–681.
Ram
´
ırez, M. and Geffner, H. (2009). Plan Recognition as
Planning. In International Joint Conference on Artifi-
cial Intelligence, pages 1778–1783.
Riboni, D., Pareschi, L., Radaelli, L., and Bettini, C. (2011).
Is Ontology-Based Activity Recognition Really Ef-
fective? In IEEE International Conference on Per-
vasive Computing and Communications Workshops,
pages 427–431.
Simpson, R., Schreckenghost, D., LoPresti, E. F., and
Kirsch, N. (2006). Plans and Planning in Smart
Homes. In Designing Smart Homes: The Role of AI,
pages 71–84. Springer.
Sirin, E., Parsia, B., Grau, B. C., Kalyanpur, A., and Katz,
Y. (2007). Pellet: A practical OWL-DL reasoner.
Journal of Web Semantics, 5(2):51–53.
Sohrabi, S., Riabov, A. V., and Udrea, O. (2016). Plan
Recognition as Planning Revisited. In International
Joint Conference on Artificial Intelligence, pages
3258–3264.
Occupant Activity Recognition in IoT-Enabled Buildings: A Temporal HTN Planning Approach
965
Sukthankar, G., Goldman, R. P., Geib, C., Pynadath, D.,
and Bui, H. (2014). An Introduction to Plan, Activity,
and Intent recognition. In Plan, Activity, and Intent
Recognition, pages 1–22. Elsevier.
Uschold, M. and Gruninger, M. (1996). Ontologies: Princi-
ples, methods and applications. The knowledge engi-
neering review, 11(2):93–136.
van der Aalst, W. M. P. (2011). Process Mining: Discov-
ery, Conformance and Enhancement of Business Pro-
cesses. Springer Publishing Company, Incorporated,
1st edition.
Van-Horenbeke, F. A. and Peer, A. (2021). Activity,
Plan, and Goal Recognition: A Review. Frontiers in
Robotics and AI, 8.
van Kasteren, T. L., Englebienne, G., and Kr
¨
ose, B. J.
(2011). Human Activity Recognition from Wireless
Sensor Network Data: Benchmark and Software. In
Chen, L., Nugent, C. D., Biswas, J., and Hoey, J., edi-
tors, Activity Recognition in Pervasive Intelligent En-
vironments, pages 165–186. Atlantis Press.
Wu, J., Osuntogun, A., Choudhury, T., Philipose, M., and
Rehg, J. M. (2007). A Scalable Approach to Activity
Recognition Based on Object Use. In IEEE Interna-
tional Conference on Computer Vision, pages 1–8.
Ye, J., Stevenson, G., and Dobson, S. (2014). USMART: An
Unsupervised Semantic Mining Activity Recognition
Technique. ACM Transactions on Interactive Intelli-
gent Systems, 4(4).
APPENDIX
The acronyms mentioned in this paper are listed in
Table 3.
Table 3: List of acronyms.
Acronym Description
AI Artificial Intelligence
IoT Internet of Things
PGR Plan and Goal Recognition
HTN Hierarchical Task Network
HPDL Hierarchical Domain Definition Language
PDDL Planning Domain Definition Language
NB Naive Bayes
HMM Hidden Markov Model
HSMM Hidden Semi-Markov Model
CRF Conditional Random Field
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
966
