
Multi-Agent Trajectory Prediction for Urban Environments with UAV
Data Using Enhanced Temporal Kolmogorov-Arnold Networks with
Particle Swarm Optimization
Mohammad Reza Mohebbi
1,2 a
, Elahe Kafash
3
and Mario D
¨
oller
1 b
1
Josef Ressel Center Vision2Move, University of Applied Sciences Kufstein Tirol, Kufstein, Austria
2
Department of Computer Science, University of Passau, Passau, Germany
3
Department of Computer Engineering, Imam Reza (AS) International University, Mashhad, Iran
Keywords:
Kolmogorov-Arnold Networks, Particle Swarm Optimization, Multi-Agent, Trajectory Forecasting,
Intelligent Transportation System, Unmanned Aerial Vehicle, Feature Extraction.
Abstract:
Accurate trajectory prediction for moving agents such as pedestrians and vehicles is essential for autonomous
driving, intelligent navigation, and abnormal behavior detection. Real-time prediction of future movements
enhances the development of autonomous vehicles and the efficiency of traffic management systems. In this
study, a novel trajectory prediction approach based on Temporal Kolmogorov-Arnold Networks (TKAN) is
introduced, using the TUMDOT-MUC dataset collected by Unmanned Aerial Vehicles (UAVs) in Munich,
Germany, to model large-scale urban scenarios. To improve prediction accuracy, additional features were
extracted from the primary dataset and incorporated into the TKAN architecture, demonstrating a marked
performance improvement over general machine learning models. The accuracy of predictions is further re-
fined by tuning hyperparameters of TKAN through Particle Swarm Optimization (PSO). The proposed model
provides a robust and reliable solution for the trajectory prediction of multi-agents in challenging urban traf-
fic conditions. This research advances intelligent and effective transportation systems by proposing scalable
methods for improved traffic management and safety in densely populated urban areas, ultimately contributing
to smarter and more efficient transportation networks.
1 INTRODUCTION
Traffic congestion can lead to longer travel times,
higher fuel consumption, and air pollution, negatively
impacting public health and quality of life for urban
residents. In addition, traffic congestion would cause
economic losses, disruption of commercial activities,
and low productivity levels. These challenges impose
costly social and economic pressures on city trans-
port systems, and cannot afford to delay the search
for efficient solutions to control and mitigate prob-
lems (C. Arti and Kumar, 2022). Urbanization places
more pressure on the transportation infrastructure as
urban populations continue to grow. The early signs
of congestion in most cities around the world begin
with specific sections of roads where the number of
vehicles traveling through the road is greater than the
capacity of the road section, which slows traffic speed
a
https://orcid.org/0009-0004-9455-2558
b
https://orcid.org/0000-0002-9716-564X
and increases travel time. More vehicles mean more
fuel consumption and air pollution conditions that ad-
versely affect the health of citizens (R. SenthilPrabha
and Harish, 2023).
In recent years, the ability to predict vehicle tra-
jectories has gained attention as a promising ap-
proach for traffic optimization in Intelligent Trans-
portation Systems (ITS). Accurate trajectory predic-
tion can also help alleviate congestion and optimize
traffic flow. The analysis of the data of moving ve-
hicles enables the system to judge the flow of traffic
and provides valuable information to decide in real-
time (M. R. Mohebbi and Yamnenko, 2024). Predict-
ing traffic flow can route drivers through detours, re-
ducing air pollution and traffic incidents. Such pre-
dictive senses are also of immense importance for
urban planners, planning better transportation infras-
tructure, improving public services, and encourag-
ing the development of smart and sustainable cities
(X. Kong and Zhang, 2016). In addition, anticipat-
586
Mohebbi, M. R., Kafash, E. and Döller, M.
Multi-Agent Trajectory Prediction for Urban Environments with UAV Data Using Enhanced Temporal Kolmogorov-Arnold Networks with Particle Swarm Optimization.
DOI: 10.5220/0013243100003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 586-597
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

ing the next move of dynamic objects is a key to
autonomous mobility, with applications such as au-
tonomous vehicles safely interacting in shared in-
frastructure considering the trajectories of pedestrians
and other vehicles (Deo and Trivedi, 2017).
Traditional Machine Learning (ML) models, in-
cluding Support Vector Machines (SVM), Multilayer
Perceptrons (MLP), Random Forest (RF), and early
recurrent models, including Long Short-Term Mem-
ory (LSTM) networks, have been tried to improve the
accuracy of traffic prediction. However, most of these
models fail in processing nonlinear, complex traffic
data, especially in dynamically changing urban envi-
ronments (B. Yang and Tian, 2019). The serious lim-
itation of these models is also related to the fact that
treating temporal sequences this way, focusing on lin-
earity, might prevent them from capturing complex re-
lationships in urban traffic. Deep Learning (DL) mod-
els, especially more advanced Recurrent Neural Net-
works (RNNs), presented the potential to help with
some of those issues by providing proper modeling
of complex temporal sequences. More sophisticated
models for real-time forecasting by fusing data from
multiple sources are needed in the case of urban traffic
flow (Y. Lv and Wang, 2014).
This is addressed with the adoption and imple-
mentation of a new architecture known as Tempo-
ral Kolmogorov-Arnold Networks (TKAN), specially
modeled to handle nonlinear complex dependencies
in temporal data. The theoretical rationale for the im-
plementation of TKANs lies in the theories by Kol-
mogorov and Arnold, uniquely and specially fitted
for modeling and identification of complex patterns
in time-series data. Thus, it has an advanced archi-
tecture to handle large-scale and dynamic data more
efficiently. TKAN is thus assumed to be proficiently
effective in predicting real-time trajectory in an ur-
ban environment. Unlike other traditional methods,
TKAN considers historical pattern attributes for the
generation of more accurate future behavior predic-
tions. Therefore, it considers robust potential for its
use within any intelligent traffic management system
(Genet and Inzirillo, 2024).
Meanwhile, parallel methodological advances in
data collection allow for more accurate and profound
inputs of urban traffic flow. Among others, drones
or Unmanned Aerial Vehicles (UAVs) have been sug-
gested as an efficient source of data collection on traf-
fic flow and other movements within cities (M. R. Mo-
hebbi and Tavasoli, 2024). UAVs guarantee broad,
real-time, and multiangle views often unreachable for
ground sources and notably enhance the quality of
data collection even for the most densely populated
or hard-to-reach areas. Applications involving trajec-
tory prediction benefit from UAVs, which improve ac-
curacy by providing expansive and detailed datasets
that often are beyond the reach of ground sensors
(A. Kutsch and Bogenberger, 2024). Therefore, en-
hancing both the quality and quantity of data im-
proves efforts in traffic management and urban plan-
ning through the use of UAV technology, which, in
turn, provides better insights for researchers and pol-
icymakers into the complicated traffic patterns and
movement behaviors within cities.
This study addresses the growing complexity of
urban traffic and the limitations of standard predictive
models by introducing an advanced framework that
integrates the Temporal Kolmogorov-Arnold Net-
work with UAV-based data acquisition. The proposed
scheme leverages the capability of TKAN for pattern
learning of nonlinear variance in time series and high-
resolution real-time input provided through UAVs for
setting up a more reliable methodology of traffic man-
agement in dynamic and high-density urban infras-
tructure. They address the demand for reliable, effi-
cient, and scalable predictive models with the aim of
enabling transportation systems that are safer, more
intelligent, and that can learn and adapt to the chal-
lenges related to modern urban mobility. To advance
the predictive accuracy and scalability of urban traf-
fic models, the following key contributions are intro-
duced:
• Noise-Reduction Techniques. Several tech-
niques, such as a moving average filter, have been
used to normalize motion data in order to reduce
the influence of unreliable points, such as outliers.
All of these efforts help maintain the data quality
so that model performance and accuracy of pre-
dictions can be improved during the training pro-
cess.
• TKAN Model. This model was selected for its
efficacy in modeling temporal data by capturing
intricate nonlinear features and structures of the
traffic pattern. It would improve the capability
of the model for scalability in large data and, in
essence, a dynamic urban setting with robust tra-
jectory predictions.
• Particle Swarm Optimization (PSO) for Hy-
perparameter Tuning. PSO is applied for hy-
perparameter optimization to further improve the
efficiency and precision of the model. This intelli-
gent parameter search not only accelerates model
tuning but also returns a model optimized for ef-
fective analysis and prediction.
The remainder of this paper is organized as follows.
Section 2 summarizes the related work by situat-
ing our approach with respect to the existing meth-
ods. Section 3 provides a detailed description of the
Multi-Agent Trajectory Prediction for Urban Environments with UAV Data Using Enhanced Temporal Kolmogorov-Arnold Networks with
Particle Swarm Optimization
587

methodology, covering the data processing pipeline,
model architecture, and temporal enhancement tech-
niques. Section 4 presents a full empirical evaluation,
and conclusions are given in Section 5.
2 RELATED WORK
Trajectory prediction has been one of the most salient
facial features in ITS research and has made sufficient
progress along three main lines: vehicle trajectory
prediction, human trajectory forecasting, and multi-
agent trajectory modeling. These enable improved
safety, optimized flow, and better traffic management.
The following section tries to identify significant find-
ings and methodological variety in these areas that re-
cent research addresses with evolving challenges for
traffic prediction.
2.1 Vehicle Trajectory Prediction
Trajectory prediction has been considered an impor-
tant task within the scope of ITSs, especially for very
dense and complex urban scenarios. Advanced ML
and DL models increasingly contribute to the neces-
sary analysis of extensive traffic datasets for the detec-
tion of complex traffic movement patterns and the im-
proved prediction of vehicle behavior. For instance,
Mohebbi et al. (M. R. Mohebbi and Yamnenko, 2024)
presented how the usage of liquid neural networks
combined with UAV-derived data significantly im-
proves trajectory predictions in crowded scenarios by
offering a wider perspective and enabling the capabil-
ity to predict urban traffic flow more precisely.
Scalability is an important factor in the predic-
tive models that should be used in handling large
datasets of traffic for various instant applications. An-
other approach has proposed a framework that is ef-
ficient in data management for higher volumes of
data, enabling the application of such data in var-
ious urban contexts with complex adaptive func-
tions that are required by autonomous vehicle sys-
tems (P. Rathore and Bezdek, 2019). This makes the
frameworks highly effective in dynamic urban envi-
ronments, as they can manage large volumes of traf-
fic data without losing accuracy. Another research
under the objective-oriented approach of prediction
demonstrated that the focus on particular traffic pre-
diction goals, such as maintaining the network in a
fluid state, considerably improved predictability to-
gether with system responsiveness (H. Zhao and Li,
2021).
In the prospect of having more accurate long-term
predictions, researchers have turned to using spatio-
temporal algorithms, which enable them to forecast
more about extended trajectory paths. The strategic
benefits are perceived in terms of timely and data-
driven decisions for traffic management and urban
planning (T. Wu and Chen, 2022). One of the recent
effective methods adopted includes the use of Varia-
tional Autoencoders (VAEs), which study historical
traffic data for patterns that enable highly accurate
prediction of vehicle behavior in future scenarios by
learning from past trajectories (M.
´
A. De Miguel and
Garcia, 2022).
Recently, hybrid models have gained promi-
nence that try to render the predictive models more
amenable to dynamic and fluctuating conditions. For
instance, networked traffic data illustrated promis-
ing results considering the identification and analy-
sis of dynamic movement patterns by integrating the
LSTM network with adaptive chirp mode decompo-
sition. This downloaded hybrid method may improve
the extraction of features and improve the precision
of prediction in capturing complex temporal struc-
tures in urban traffic flow (Z. Wang and Jiang, 2024).
In the meantime, some lightweight DL models have
been developed to fit the usage demand of applica-
tions in dense traffic scenarios in recent years. This
is important because both high processing speed and
accurate predictions are usually needed for real-time
applications (C. Wang and Lu, 2022).
In some research, such as Li et al. (Y. Li and Wu,
2024) focused on the interaction of the vehicle with
other urban elements, the results obtained showed
that environmental factors and, mainly, the presence
of pedestrians and infrastructure played an important
role in increasing the accuracy of the prediction re-
sults of the methods studied. The following interac-
tions were embedded into predictive models; boosting
prediction accuracy increases the robustness of the
model for changes in the environment, as shown in
recent work about environment-aware prediction ap-
proaches. Similarly, social attention mechanisms that
are integrated with LSTM networks have also shown
how modeling interactions among road users can be
used to further refine the prediction results (S. Qiao
and Zhao, 2023).
Other techniques incorporated plate recognition
data to further improve the accuracy of urban traffic
flow forecasts by accurately estimating the tendencies
of vehicle motion at busy intersections (X. Shan and
Zhang, 2023). Zhou et al. (H. Zhou and Fan, 2023)
have combined Conditional VAEs with social aware-
ness models and found substantial improvements in
accuracy, particularly in highly populated urban re-
gions where vehicular interactions are even more in-
volved.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
588

This stream of research elicits a continuous shift
toward more adaptive and scalable trajectory predic-
tion models that are important to help foster relevant
ITS in modern urban environments. These models
will grant appropriate flow, safety, and responsiveness
of traffic management systems based on new learning
techniques, scalability of frameworks, and considera-
tion of the urban context.
2.2 Pedestrian Trajectory Prediction
Pedestrian trajectory prediction has become a focal
area in urban traffic management, especially in im-
proving safety and streamlined movement in highly
populous settings. This enables accurate trajectory
predictions for pedestrians. In this way, proactive
interventions in traffic are possible. These would
go a long way to improving the safety of pedestri-
ans. Advanced models demonstrate greater accuracy
in these predictions, far above what traditional meth-
ods are capable of. For instance, the application of
diffusion-based autoregressive models has been made
in the prediction of complex pedestrian paths, though
these have tended to realize a substantial improve-
ment in accuracy due to their ability to model multi-
dimensional aspects of human movement (K. Lv and
Ni, 2024).
In a broad examination of human trajectory pre-
diction techniques, research highlights a wide array of
approaches that are effective in diverse traffic scenar-
ios. With the incorporation of spatial-temporal inter-
action, graph-based network models have gained the
lead in efficiency for modeling dynamic pedestrian
environments. They are able to analyze how pedes-
trians interact with both people and vehicles, hence
obtaining more exact predictions for places with high
flow (A. Rudenko and Arras, 2020; R. Wang and Cui,
2022).
In addition, clustering-based methods combined
with LSTM networks improve the prediction accu-
racy by clustering certain groups of pedestrian paths
according to their respective shared characteristics;
this helps the model cope with large variations in in-
dividual behavior (H. Xue and Reynolds, 2020). The
challenge of environmental complexity is the core is-
sue in the development of pedestrian movement mod-
eling. Considering genuine complexities from the real
world, such as viewpoint distortion, advanced meth-
ods have been suggested that will deliver high accu-
racy even in complicated settings. In one work, the
use of spatial distortions to adjust a prediction yields
more robust trajectory forecasts, which will be highly
useful in urban areas where pedestrian movements are
highly variable (S. Gundreddy and Bakshi, 2023).
Another front where developments are being made
involves the use of attention mechanisms in sequence
prediction for pedestrians. An attention-driven model
has shown tendencies to recognize subtle dependen-
cies and time-based sequences of pedestrian paths.
This allows for fine-grained improvements in predic-
tions of crowded urban environments, where this at-
tention mechanism acts to give a further added ad-
vantage in enhancing the model in capturing intri-
cate movement patterns. (E. Zhang and Malhan,
2022). Moreover, cross-attention-based predictive
models have improved multistep human movement
predictions for scenarios that involve the interaction
of complicated traffic situations where other tradi-
tional models struggle to maintain accuracy (W. Zhu
and Yi, 2023).
Other recent works further stress the sole impor-
tance of multi-modal approaches, as they represent
variants of different behavior patterns among individ-
ual pedestrians. Such models significantly improve
the reliability of prediction. For example, multi-
modal modeling techniques can be used to account
for a wide range of pedestrian behaviors and have bet-
ter eventual prediction performance (L. Shi and Hua,
2023). More recently, conditional flow normaliza-
tion has been shown to increase the real-time accu-
racy of pedestrian trajectory predictions to better meet
the specific challenges of urban areas with dynamic
pedestrian densities (J. Sun and Lu, 2021).
2.3 Multi-Agent Trajectory Prediction
Trajectory prediction in multi-agent systems is dis-
tinctive and challenging due to a multitude of diverse
and often unpredictable behaviors among agents.
Several recent extensions proposed predictive models
incorporating situational awareness and risk assess-
ment, yielding notable improvements in the accuracy
of multi-agent trajectory prediction. For example, the
Self Attention-LSTM model, designed for dynamic
risk and situational context assessment, has been use-
ful in enhancing trajectory forecasts capturing sev-
eral agent behaviors in uncertain scenarios (Y. Ma
and Manocha, 2019). Similarly, DL models in het-
erogeneous traffic behavior have proven their useful-
ness while handling diverse agent dynamics within
complex urban settings (A. Kutsch and Bogenberger,
2024).
The importance of diverse, high-quality data
sources for multi-agent trajectory prediction is
also increasingly recognized, as highlighted by the
TUMDOT-MUC dataset. This dataset was developed
to capture all details of traffic interaction using UAVs
and provided comprehensive details on agent move-
ment for training predictive models on more subtle
Multi-Agent Trajectory Prediction for Urban Environments with UAV Data Using Enhanced Temporal Kolmogorov-Arnold Networks with
Particle Swarm Optimization
589

representations of multi-agent interactions (A. Kutsch
and Bogenberger, 2024). Such integration of diverse
data allows predictive models to better account for
and model interactions between agents, mainly when
these are in dense urban settings.
It is also underscored by advances in the field of
dynamic system modeling that provide the basis for
neural networks specifically engineered to manipu-
late the dynamics of nonlinear interactions. Among
these, the TKAN represents yet another big stride, op-
timized for analyzing intricate behaviors in dynamic
environments. Such networks are based on chaos the-
ory and nonlinear dynamics for extracting temporal
and spatial patterns in the data of dynamic scenar-
ios. It can be used to simulate complex, nonlinear
interactions. The model demonstrates high accuracy
in various applications that involve dynamic predic-
tion, movement analysis, and behavioral simulation,
which makes it suitable for real-time forecasting tasks
(K. Xu and Wang, 2024),(Kashefi, 2024).
One of the studies underlined that TKAN excelled
in spatial-temporal integration regarding multi-agent
dynamics, while the model considers several agents at
once and therefore can ensure higher predictive accu-
racy compared to traditional models (Genet and Inzir-
illo, 2024). Furthermore, TKAN has an excellent ap-
plication for dynamic and high-density environments,
such as those generated by the urban traffic system,
because it is quite flexible when adaptation speedily
copes with complex nonlinear patterns.
In summary, recent multi-agent trajectory pre-
diction contributions have marked a current trend
for models that incorporate contextually aware, rich
sources of data, and use state-of-the-art neural ar-
chitectures such as the TKAN. These improvements
enable multi-agent predictive models to guarantee
much higher accuracy, helping traffic management
and safety policing in complex urban settings.
3 DATASET AND
METHODOLOGY
This section elaborated on the methodology adopted
for trajectory prediction with a discussion on the
preparation of the dataset, the extraction of features,
and the modeling framework. The proposed model
consists of the TKAN optimized with PSO for devel-
oping an object trajectory prediction framework.
3.1 Dataset Overview
This work leveraged the rich TUMDOT-MUC dataset
for traffic analysis in urban environments. The cap-
ture has been performed using 12 UAVs equipped
with cameras continuously observing a segment of a
700-meter-long busy urban roadway in Munich, Ger-
many, over two afternoons during peak traffic times
on Thursday, October 6th, 2022, and Wednesday, Oc-
tober 12th, 2022. Figure 1 illustrates the specific
location of the monitored road segment in Munich,
providing context to the high-density traffic dynamics
captured in the dataset.
Each recording session captures the road environ-
ment and traffic behaviors for several hours, focus-
ing on periods of high traffic density. The first-day
recordings were from 15:35 to 18:45, and for the sec-
ond day from 15:00 to 18:25. This data forms origi-
nal material with useful insights into traffic dynamics
and a wide range of road user behaviors, thus offer-
ing strong data material upon which to ground tra-
jectory prediction. The extracted data covers a broad
range of road users, including cars, buses, trucks,
trams, motorcycles, bicycles, pedestrians, kick scoot-
ers, and trailers. It contains detailed information such
as the category of each object, its unique identifica-
tion, its location, its velocity, acceleration, and orien-
tation across consecutive frames.
UAVs positioned to capture the road segment from
different heights and angles allow smooth tracking
across multiple frames. The interactions between traf-
fic participants in mixed-traffic conditions have var-
ied well, which allows the dataset to contain complex
traffic dynamics that are relevant for trajectory predic-
tion models.
3.2 Feature Extraction and Description
This part outlines the primary and derived features
that were critical for accurate trajectory prediction,
with descriptions of each feature provided in Table
1. The primary features derived from the dataset in-
clude the basic data points: stage time, object class,
object unique ID, x-spatial and y-spatial coordinates,
speed, and acceleration. Our task is to develop further
features to add to the model so that it can enhance its
performance. Features apart from these basic ones are
extracted to derive further insight and improve the ac-
curacy of trajectory prediction. The features that have
been extracted, along with their relevance and useful-
ness in the approach taken to solve the problem, are
as follows:
• Distance Traveled. The distance traveled by each
object, scaled between 0 and 1 based on the min-
imum and maximum distances within the dataset,
is given by:
d
traveled
=
d
traveled
− min
traveled
max
traveled
− min
traveled
, (1)
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
590

Figure 1: Location of monitored road segment in Munich.
• Average Velocity (v
avg
). The average velocity is
calculated as the distance traveled over time, rep-
resenting the mean velocity of each object:
v
avg
=
d
traveled
time
, (2)
• Manhattan Distance. The Manhattan distance
between two vehicles is the sum of the absolute
differences of their coordinates:
Manhattan Distance = |x
1
− x
2
| + |y
1
− y
2
|, (3)
where (x
1
, y
1
) and (x
2
, y
2
) represent the coordi-
nates of two vehicles.
• Manhattan Average Speed. The Manhattan Av-
erage Speed represents the average speed of the
surrounding vehicles for each frame, indicating
local congestion:
Manhattan Average Speed =
1
N
N
∑
i=1
v
i
, (4)
where N is the number of nearby vehicles and v
i
denotes the speed of the i-th nearby vehicle.
• Yaw Rate. The yaw rate, representing the angular
velocity around the z-axis, is calculated as the rate
of change in the z-axis rotation:
Yaw Rate =
∆rotation
z
∆t
, (5)
• Jerk. Jerk captures sudden changes in accelera-
tion, defined as the time derivative of acceleration:
Jerk =
∆acceleration
∆t
, (6)
• Acceleration Magnitude. Acceleration Magni-
tude is the intensity of acceleration, given by the
magnitude of the acceleration vector:
Acceleration Magnitude =
q
a
2
x
+ a
2
y
+ a
2
z
, (7)
• Rotation Magnitude. Rotation Magnitude cap-
tures the total rotation change rate, calculated as
the magnitude of the rotation vector:
Rotation Magnitude =
q
r
2
x
+ r
2
y
+ r
2
z
, (8)
• Heading. The heading represents the direction of
movement of the object, determined using the arc-
tangent of the velocity components:
Heading = arctan
v
y
v
x
. (9)
3.3 TKAN for Trajectory Prediction
The approaches used TKAN since they are capable
of capturing the complex, temporal dependencies in
such a sequence-based data type, which is best suited
for object trajectory prediction. The model utilizes
multi-layer neural networks that map dynamic inputs
over time, capturing non-linear relationships in the
data, hence offering fine-grained, temporal tracking
of objects.
TKAN models the complex temporal dependen-
cies of data in a hierarchical neural network layer
manner. These layers map object positions across
frames and create trajectories with which the model
can predict not just the immediate future locations but
also the long-term trajectory paths. With each pre-
diction, previous states are considered by the TKAN
project’s future states, highlighting the essential de-
tails in both space and time of motion for applica-
tions such as forecasting changes in flow. The TKAN
model represents complex functions as:
f (x
1
, x
2
, . . . , x
n
) =
∑
q
Φ
q
∑
p
ϕ
p,q
(x
p
)
!
. (10)
where:
• ϕ
p,q
are univariate functions mapping each input
variable x
p
,
• Φ
q
aggregates these mappings, facilitating the
identification of temporal patterns across data se-
quences.
3.4 PSO for Model Optimization
To improve TKAN performance, the PSO method
was adopted to optimize hyperparameters (layer
Multi-Agent Trajectory Prediction for Urban Environments with UAV Data Using Enhanced Temporal Kolmogorov-Arnold Networks with
Particle Swarm Optimization
591
Table 1: Extensive feature set of original and extracted features.
Feature Unit Symbol Brief Description Base Feature Derived Feature
Timestamp [s] t Frame time Yes No
Category – cat Agent type (9 categories) Yes No
Track ID – ID Unique agent identifier Yes No
Translation [m] [x, y, z] Agent’s ground center position Yes No
Dimension [m] [l, w, h] Agent’s 3D bounding box Yes No
Velocity [m/s] [vx, vy, vz] Agent velocity vector Yes No
Acceleration [m/s
2
] [ax, ay, az] Agent acceleration vector Yes No
Distance Traveled – d
travel
Distance traveled by agents No Yes
Average Velocity [m/s] v
avg
Mean velocity of agent No Yes
Manhattan Distance [m] d
man
Distance between agents No Yes
Manhattan Average Speed [m/s] v
man
Average speed of surrounding agents No Yes
Yaw Rate [rad/s] ψ Angular velocity around z-axis No Yes
Jerk [m/s
3
] j Sudden changes in acceleration No Yes
Displacement [m] ∆d Agent’s movement in 3D space No Yes
Acceleration Magnitude [m/s
2
] a
mag
Overall acceleration intensity No Yes
Rotation Magnitude – r
mag
Total rotation change rate No Yes
Heading [rad] θ Agent’s movement direction No Yes
depth, neuron number, and learning rate) by simulat-
ing particles moving in the hyperparameter solution
space. The particles corresponding to the candidate
solutions are defined by a combination of TKAN hy-
perparameters. The PSO process iterates as follows:
• Particle Position Representation. the current
position of each particle x
j
represents a unique set
of TKAN hyperparameters.
• Velocity Update. Each particle updates its veloc-
ity v
j
according to the equation:
v
j
(k + 1) = c
i
· v
j
(k) + c
c
· r
1
· (p
j
− x
j
)
+ c
s
· r
2
· (p
g
− x
j
)
(11)
Here, c
i
is the inertia coefficient that maintains the
current momentum of the particle, c
c
is the cogni-
tive coefficient that directs the particle towards its
best known position p
j
(personal best), and c
s
is
the social coefficient that attracts the particle to-
ward the best global position p
g
. The random fac-
tors r
1
and r
2
introduce stochasticity, ensuring a
diverse exploration of the solution space.
• Position Update. Using the updated velocity, the
position of each particle is adjusted according to:
x
j
(k + 1) = x
j
(k) + v
j
(k + 1). (12)
This new position corresponds to a revised set of
hyperparameters for the TKAN model.
The function repeatedly adjusts velocity and po-
sition so that the particles move down to an optimal
combination of hyperparameters to reduce the error
of the model. This enhances the learning stages of
TKAN, which increases predictive accuracy and de-
creases error rates, allowing for a faster training pro-
cess. The use of PSO therefore simplifies both TKAN
optimization and hyperparameter tuning. Each itera-
tion of this optimization pass is summarized in pseu-
docode form in Algorithm 1.
Algorithm 1: PSO for TKAN Hyperparameter Tuning.
Data: Initialize particles with random positions and
velocities
Result: Optimal hyperparameters for TKAN
for each particle do
Set p best to current position;
Evaluate fitness (error metric for TKAN);
end
Set g best as best among all particles;
repeat
for each particle do
Update velocity:
v
j
(k + 1) = c
i
· v
j
(k)
+ c
c
· r
1
· (p best − x
j
)
+ c
s
· r
2
· (g best − x
j
)
Update position:
x
j
(k + 1) = x
j
(k) + v
j
(k + 1)
Evaluate fitness for TKAN model;
if new fitness < p best then
Update p best;
end
end
if any particle’s fitness < g best then
Update g best;
end
until convergence criteria met;
Return g best as optimal hyperparameters for TKAN
4 EXPERIMENTAL RESULTS
This section describes the results obtained after opti-
mization of the TKAN performance using PSO and
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
592
further analyzes the results of the trajectory predic-
tion. These findings reveal the improved performance
of the model in complex urban conditions in the real
world.
4.1 TKAN-PSO Model
The PSO algorithm was used to enhance the precision
of the TKAN anchored primitives in predicting trajec-
tories. This was used to fine-tune the crucial hyper-
parameters of the model for dynamic urban environ-
ments where accurate and timely prediction of object
trajectories have to be computed in a cluttered scene.
For PSO implementation, each particle represents
the position of one TKAN hyperparameter configu-
ration in the swarm of particles. The defined search
space was set up in intervals of interest to search for
optimal levels that enhance the attention mechanisms
and temporal performances of TKAN. These are the
most essential parameters of TKAN, which are crucial
to handle such complexity of temporal dependencies
and are highlighted in Table 2.
Table 2: Hyperparameter ranges for TKAN optimization.
Hyperparameter Range
Attention Layer Dimension 32 to 128 units
Dropout Rate (Attention Layer) 0.1 to 0.5
Sequence Length 10 to 100 steps
Time-Window Size 5 to 20 steps
To direct PSO toward an effective configuration,
the fitness function was designed to minimize the
Root Mean Squared Error (RMSE) on the validation
dataset. This function reliably assesses model accu-
racy, guiding PSO to converge on hyperparameter set-
tings that enhance the prediction precision of TKAN.
The fitness function used in the optimization is de-
fined as:
Fitness =
1
RMSE
(13)
The PSO configuration was made up of 30 par-
ticles, with each position of the particle being itera-
tively updated for 100 rounds. The inertia weight w
was set to 0.7, while the cognitive and social coef-
ficients (c
1
and c
2
) were both set to 1.5. These pa-
rameters were tuned to balance the algorithm between
exploration and convergence, ultimately contributing
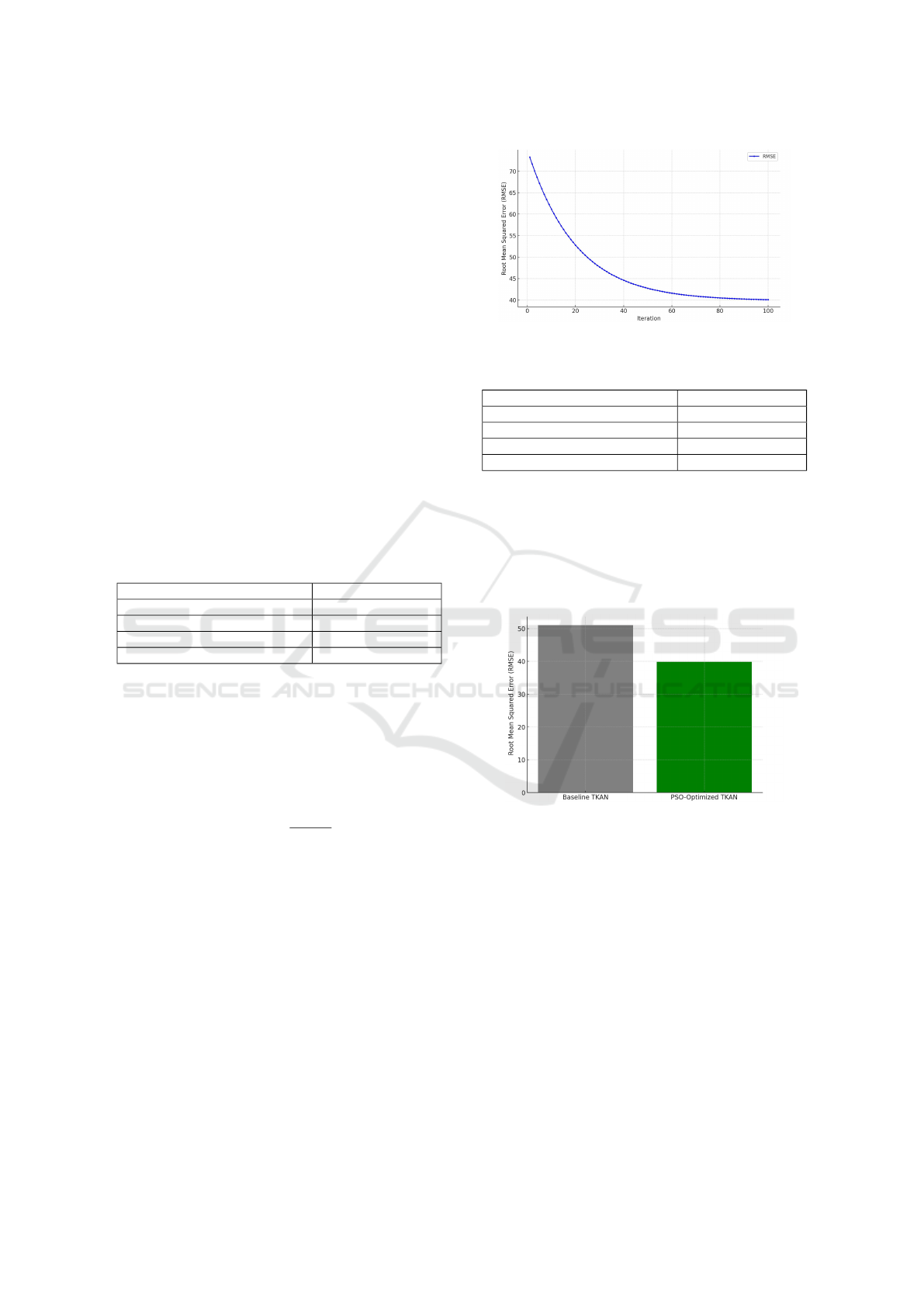
to the model’s improvement. In Figure 2, the PSO
convergence process is visualized over successive it-
erations, highlighting the steady reduction in RMSE
as the optimal performance approaches.
The final optimized configuration, displayed in
Table 3, led to a substantial reduction in trajectory
prediction error, markedly improving the real-time
performance capabilities of the TKAN.
Figure 2: PSO convergence in TKAN hyperparameter opti-
mization.
Table 3: Optimized hyperparameters for TKAN.
Hyperparameter Optimized Value
Attention Layer Dimension 96 units
Dropout Rate (Attention Layer) 0.3
Sequence Length 40 steps
Time-Window Size 15 steps
Figure 3 presents the optimized TKAN-PSO
model, which outperforms the baseline by 10% in
RMSE. This configuration enhances TKAN, making
it more effective for real-time trajectory prediction in
dynamic environments, such as rapidly changing ur-
ban settings. The TKAN-PSO model efficiently re-
duces error rates, well-suited for fast-paced scenarios.
Figure 3: Comparison of RMSE Between Baseline TKAN
and TKAN-PSO.
4.2 Visualization of Prediction Results
In this section, the experimental results of the op-
timized TKAN-PSO model are analyzed and per-
formed within a complex multi-agent urban scenario.
In a busy city space monitored by a set of UAVs, dif-
ferent types of entities, from vehicles to pedestrians,
are tracked. In these multi-agent settings, the behav-
ior of one entity may influence the other, where ve-
hicles change lanes to avoid pedestrians, and pedes-
trians are deterred when they see vehicles approach-
ing or other nearby agents. The proficiency and ca-
pacity of the model to predict these dynamics driven
by interactions between agents is evaluated through
these visualizations, demonstrating its effectiveness
Multi-Agent Trajectory Prediction for Urban Environments with UAV Data Using Enhanced Temporal Kolmogorov-Arnold Networks with
Particle Swarm Optimization
593
in predicting trajectories in high-density natural en-
vironments.
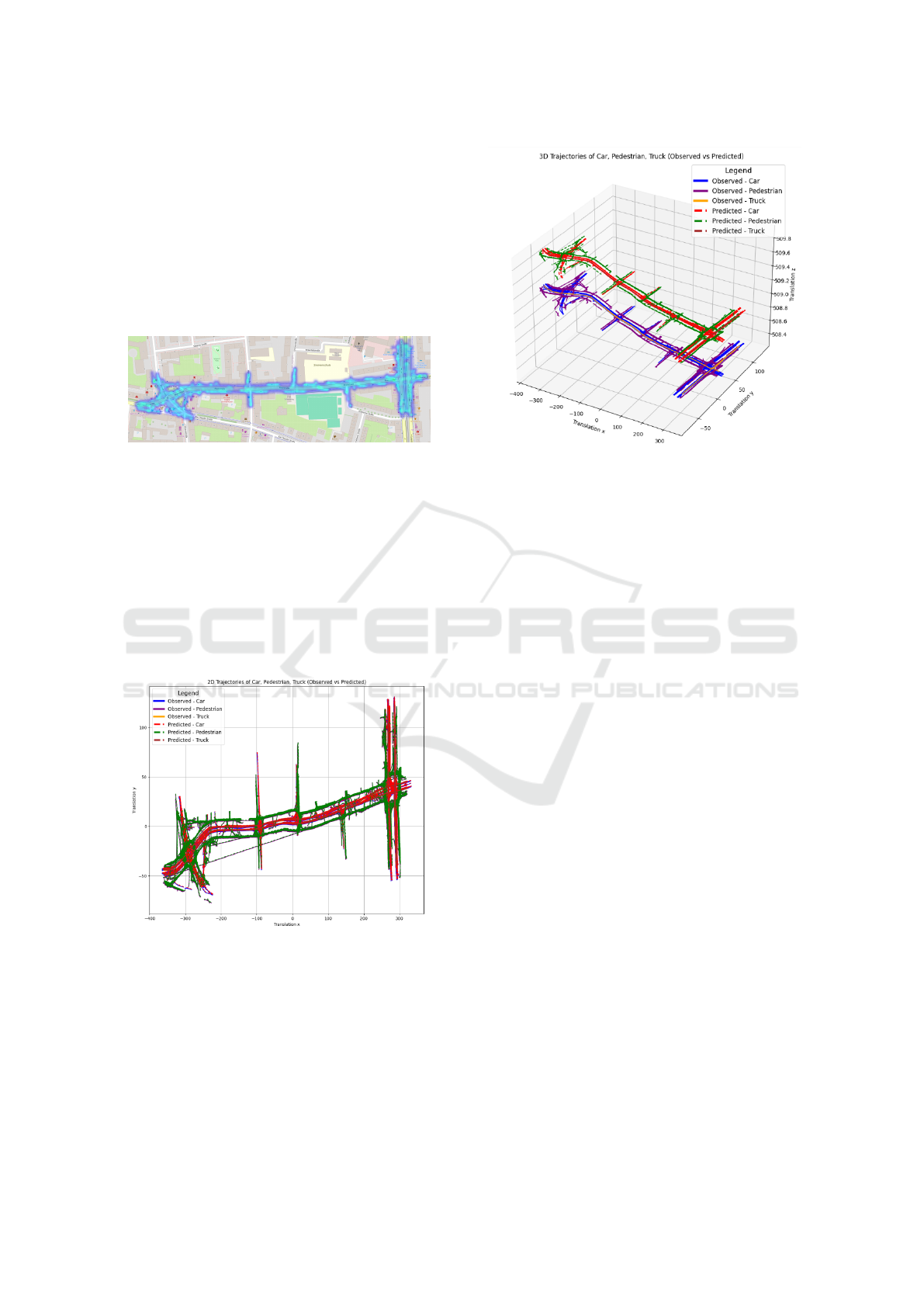
In Figure 4, a heat map of the test area is pre-
sented, where 12 UAVs control vehicles and pedes-
trians. The movements across multiple lanes and
walkways have been captured by each UAV, provid-
ing a comprehensive view of high-traffic zones. This
heatmap serves to identify areas of increased interac-
tion and potential congestion, which are essential for
real-time monitoring and predictive analysis.
Figure 4: Heatmap of urban monitoring area captured by
UAVs.
Figure 5 presents a combined view of predicted
versus actual trajectories for all agent classes. The
close matching between the predicted and the actual
paths within this larger scene underscores the reliabil-
ity of the model to generate persistent predictions in
highly variable urban scenarios. Further, its compe-
tencies toward adaptation to various settings and con-
ditions highlight the robustness of the model for ac-
curate predictions of motions in crowded, interacting
areas.
Figure 5: Comparison of predicted and actual trajectories
for all agents.
Figure 6 illustrates the 3D visualization and fur-
ther emphasizes the effectiveness of the model in
capturing lateral and vertical movements, crucial in
multi-agent scenarios where both dimensions are inte-
gral to situational awareness. This three-dimensional
view validates the accuracy of the model in spatial
tracking, which is essential in scenarios that require
real-time positional adjustments.
Figure 6: 3D visualization of predicted and actual trajecto-
ries across urban terrain.
The predicted trajectories of different agent
classes, overlaid against the ground truth trajectories
of the model, are shown in Figures 7.a to 7.c. Specifi-
cally, predicted trajectories for the car, pedestrian, and
truck classes are shown in red, green, and brown, re-
spectively; their ground truth trajectories are shown
in the matching colors of blue, purple, and orange,
and follow each other nearby. This optimization from
PSO tuning reflects in these predictions and points to
the precision of the model in high-traffic, dynamic ur-
ban settings where accurate real-time adjustments are
important for instant decision-making.
Finally, Figure 8 demonstrates how the model is
able to avoid collisions in real-time in the reactive
path adjustment. The historical data (indicated by
red points) aligns closely with the observed move-
ments (blue points), demonstrating how real-time ad-
justments are predicted by the model. When an ob-
ject encounters nearby entities, such as another vehi-
cle or a pedestrian, the predictive paths of the model
(shown in green) adapt to prevent collisions while ac-
curately projecting future paths. It therefore allows
for the capability to make interaction-based adjust-
ments that support suitability in real time for crowded
settings where smooth flow and safety are of con-
cern. It should be noted that the representation of the
predicted results reflects the accuracy and flexibility
achieved by the TKAN-PSO model. The consistent
alignment with real-world trajectories in complex ur-
ban scenarios illustrates the impact of PSO tuning,
which enhances the capacity of the model to handle
real-time, multi-agent environments. This precision
provides the TKAN-PSO model with considerable
use value for application in urban traffic management,
autonomous navigation, and multi-agent surveillance
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
594

Figure 7: Predicted vs. actual trajectories for multi-agents.
Figure 8: Illustration of historical, real, and predicted trajectories of a car agent.
systems where reliable and efficient decision-making
is essential.
4.3 Model Evaluation Metrics
To evaluate the performance of predictive models,
key metrics provide information on each accuracy,
efficiency, and overall effectiveness of the model
(M. R. Mohebbi and Yamnenko, ). This section
presents the performance of the proposed TKAN-
PSO model in comparison with other ML and DL
models. Performance evaluation is detailed in essen-
tial metrics: Mean Squared Error (MSE), Root Mean
Squared Error (RMSE), Mean Absolute Error (MAE),
R² score, and Training Time per Epoch, highlighting
the strengths and weaknesses of the model for urban
trajectory prediction.
MAE =
1
N
N
∑
i=1
|Q
i
− A
i
|, (14)
MSE =
1
N
N
∑
i=1
(Q
i
− A
i
)
2
, (15)
RMSE =
s
1
N
N
∑
i=1
(A
i
− Q
i
)
2
, (16)
R
2
= 1 −
∑
N
i=1
(A
i
− Q
i
)
2
∑
N
i=1
(A
i
−
¯
A)
2
, (17)
MPE =
1
N
N
∑
i=1
A
i
− Q
i
A
i
× 100. (18)
where O
i
denotes the predicted value of i
th
, A
i
rep-
resents the actual value of i
th
, and N signifies the num-
ber of test samples, and in R² score formula,
¯
A is the
mean of observed values, and N is the total number of
samples.
These metrics collectively offer a comprehensive
evaluation framework that balances error magnitude,
fit quality, and training efficiency. By analyzing
these aspects, practitioners can better understand the
strengths and weaknesses of the model, enabling in-
formed decisions for further optimization and im-
provement.
Table 4 presents the results of each model across
these metrics. With an R² score of 0.98, an RMSE of
39.85, and an MSE of 1588.5, the TKAN-PSO model
emerged as the most accurate in trajectory prediction.
Other models, including LSTM and GRU, performed
well, but TKAN-PSO consistently delivered superior
results across all metrics, reinforcing its reliability for
urban, multi-agent trajectory prediction.
Table 4: Performance comparison of all models on evalua-
tion metrics.
Model MAE RMSE
R
2
MPE Time
TKAN-
PSO
13.75 39.85 0.98 -12.9 128
LSTM 21.3 52.9 0.93 -15.7 152
GRU 22.6 55.3 0.91 -37.4 144
KNN 27.4 67.0 0.85 -21.1 97
RNN 24.9 60.7 0.89 -18.2 125
MLP 26.3 63.5 0.91 -19.9 107
SVR 28.7 69.8 0.83 -49.7 93
Multi-Agent Trajectory Prediction for Urban Environments with UAV Data Using Enhanced Temporal Kolmogorov-Arnold Networks with
Particle Swarm Optimization
595
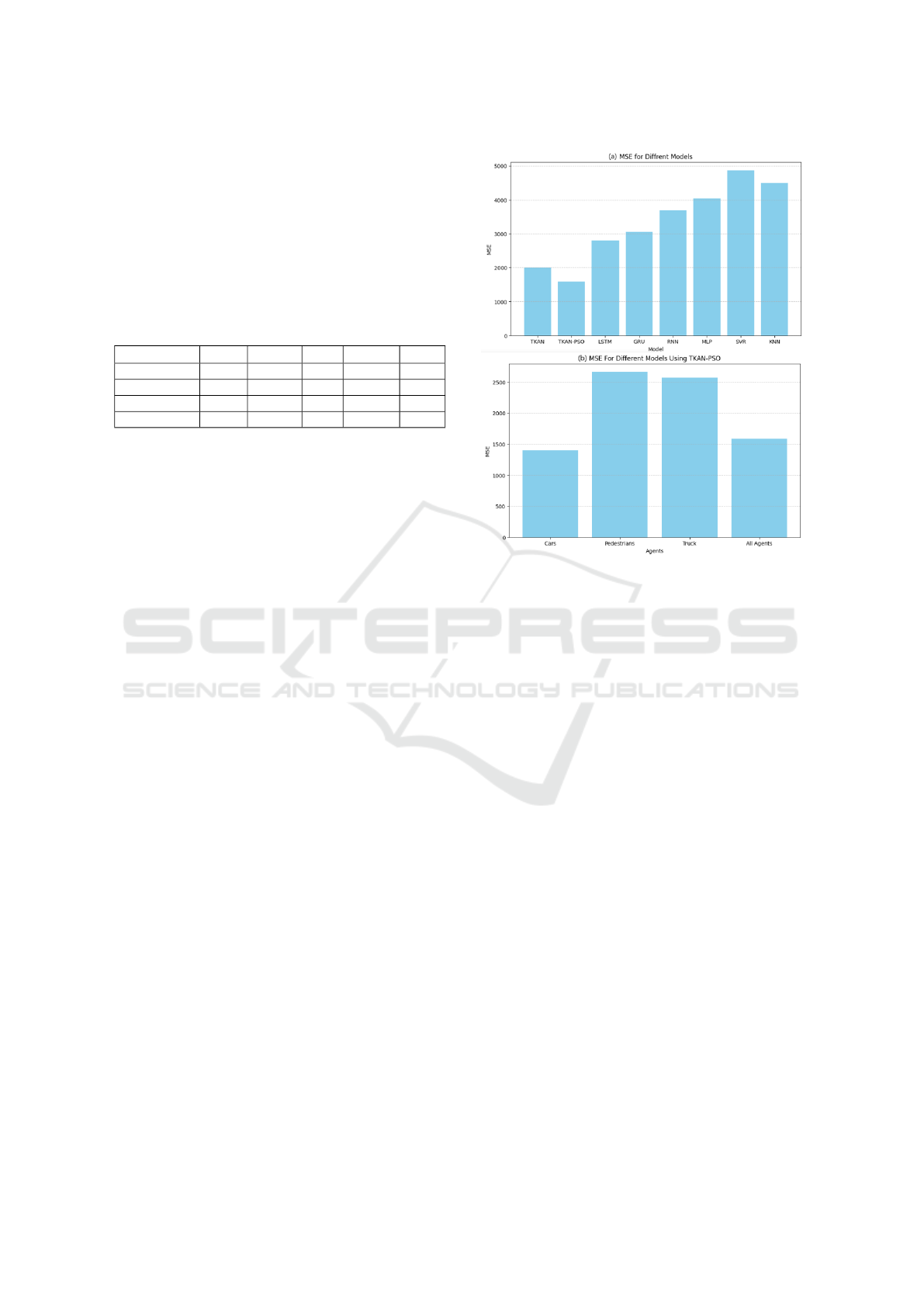
Table 5 shows the performance of the TKAN-PSO
model when predicting trajectory for specific agent
types (cars, pedestrians, and trucks), highlighting an
improved accuracy for cars due to the larger dataset
for this category. Conversely, pedestrians and trucks
show slightly lower R² score values, reflecting data
variability and the challenges inherent in predicting
these trajectories of agents.
Table 5: Performance of the TKAN-PSO model across var-
ious agent types and all agents.
Agent MAE RMSE
R
2
MPE Time
Cars 12.6 37.45 0.98 -11.75 122
Pedestrians 19.8 51.6 0.93 -15.68 137
Truck 18.1 50.7 0.93 -14.50 135
All Agents 13.75 39.85 0.98 -13.93 128
Figure 9.a visually compares the MSE-based
models, highlighting the clear advantage of the pro-
posed model over the others. In Figure 9.b, the pre-
diction accuracy of the TKAN-PSO model is shown
for each agent and the overall accuracy in the urban
traffic environment, underlining its effectiveness in
predicting urban trajectory. This underlines the effec-
tiveness of the TKAN-PSO model in predicting the
trajectory of urban settings viewed in this work. Ad-
ditionally, this is due to the diversity of data and struc-
tural optimization using PSO that enhances the abil-
ity of TKAN to make reliable, real-time predictions
within complex environmental settings. These analy-
ses help the practitioner find where the best model is
strong and where it will need improvement to support
decisions toward further optimization and enhancing
predictive performance.
5 CONCLUSIONS
The proposed TKAN-PSO model realizes marked im-
provements in multi-agent trajectory prediction. This
proves that the model is able to handle multiple urban
agents, such as vehicles, pedestrians, and trucks, with
significant accuracy in dynamic and high-density en-
vironments. The inclusion of PSO allows for the fine-
tuning of hyperparameters and therefore contributes
to major improvements in predictive accuracy and
error minimization. This optimization strategy en-
hances the resilience of the proposed model to the var-
ied spatial and temporal dependencies present in ur-
ban data, ensuring robust performance across diverse
scenarios. Central to the effectiveness of the model is
a thoughtful feature extraction process that systemat-
ically incorporates critical attributes. These features
capture key spatial and temporal patterns that allow
TKAN-PSO to predict complex trajectories for indi-
Figure 9: Comparison of model prediction accuracy by
MSE and agent type.
vidual agents while considering the broader interac-
tions among multiple agents in real-time. The multi-
agent predictive ability of TKAN-PSO will have wide
implications in the ITS area, which is crucial for real-
time decision support, urban traffic management, and
object tracking, all key elements in much safer and
more efficient mobility. Performing accurate predic-
tion and adaptation to the complex circumstances of
urban settings, TKAN-PSO enables intelligent mo-
bility. It provides a key tool that improves flow and
safety and reduces congestion in modern cities and
towns.
ACKNOWLEDGEMENTS
The financial support by the Austrian Federal Min-
istry of Labour and Economy, the National Founda-
tion for Research, Technology and Development and
the Christian Doppler Research Association is grate-
fully acknowledged.
REFERENCES
A. Kutsch, M. M. and Bogenberger, K. (2024). Tum-
dot–muc: Data collection and processing of multi-
modal trajectories collected by aerial drones. Data
Science for Transportation, 6(2):15.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
596

A. Rudenko, L. Palmieri, M. H. K. M. K.-D. M. G. and
Arras, K. O. (2020). Human motion trajectory predic-
tion: A survey. The International Journal of Robotics
Research, 39(8):895–935.
B. Yang, S. Sun, J. L. X. L. and Tian, Y. (2019). Traffic
flow prediction using lstm with feature enhancement.
Neurocomputing, 332:320–327.
C. Arti, G. Sharad, K. P. P. C. and Kumar, S. (2022).
Urban traffic congestion: Its causes-consequences-
mitigation. Research Journal of Chemistry and En-
vironment, 26(12):164–176.
C. Wang, H. L. and Lu, W. (2022). Fast prediction of
vehicle driving intentions and trajectories based on
lightweight methods. IEEE Journal of Radio Fre-
quency Identification, 6:917–921.
Deo, N. and Trivedi, M. M. (2017). Learning and predict-
ing on-road pedestrian behavior around vehicles. In
2017 IEEE 20th International Conference on Intelli-
gent Transportation Systems (ITSC), pages 1–6. IEEE.
E. Zhang, N. Masoud, M. B. J. L. and Malhan, R. K. (2022).
Step attention: Sequential pedestrian trajectory pre-
diction. IEEE Sensors Journal, 22(8):8071–8083.
Genet, R. and Inzirillo, H. (2024). Tkan: Tempo-
ral kolmogorov-arnold networks. arXiv preprint
arXiv:2405.07344.
H. Xue, D. Q. H. and Reynolds, M. (2020). Poppl:
Pedestrian trajectory prediction by lstm with auto-
matic route class clustering. IEEE Transactions on
Neural Networks and Learning Systems, 32(1):77–90.
H. Zhao, J. Gao, T. L. C. S. B. S. B. V. Y. S. Y. C. C. S. and
Li, C. (2021). Tnt: Target-driven trajectory predic-
tion. In Conference on Robot Learning, pages 895–
904. PMLR.
H. Zhou, X. Yang, D. R. H. H. and Fan, M. (2023). Csir:
Cascaded sliding cvaes with iterative socially-aware
rethinking for trajectory prediction. IEEE Transac-
tions on Intelligent Transportation Systems.
J. Sun, Z. Wang, J. L. and Lu, C. (2021). Unified and fast
human trajectory prediction via conditionally parame-
terized normalizing flow. IEEE Robotics and Automa-
tion Letters, 7(2):842–849.
K. Lv, L. Y. and Ni, X. (2024). Learning autoencoder diffu-
sion models of pedestrian group relationships for mul-
timodal trajectory prediction. IEEE Transactions on
Instrumentation and Measurement.
K. Xu, L. C. and Wang, S. (2024). Kolmogorov-arnold net-
works for time series: Bridging predictive power and
interpretability. arXiv preprint, arXiv:2406.02496.
Kashefi, A. (2024). Kolmogorov-arnold pointnet: Deep
learning for prediction of fluid fields on irregular ge-
ometries. arXiv preprint, arXiv:2408.02950.
L. Shi, L. Wang, C. L. S. Z. W. T. N. Z. and Hua, G. (2023).
Representing multimodal behaviors with mean loca-
tion for pedestrian trajectory prediction. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
45(9):11184–11202.
M. R. Mohebbi, J. Klinger, M. D. J. M. N. A. and Tava-
soli, M. (2024). Advanced driving behavior analy-
sis through kolmogorov-arnold network and uav traf-
fic data. Accepted, to appear.
M. R. Mohebbi, M. Tavasoli, M. D. J. M. N. A. M. J. H. Z.
and Yamnenko, I. (2024). Vehicle trajectory predic-
tion in congested urban traffic leveraging liquid neural
network and uav data. Accepted, to appear.
M. R. Mohebbi, M. J. Hassan Zada, M. R.-S. M. D. and
Yamnenko, I. Network traffic co-movement assess-
ment via oriented basis signal processing and ensem-
ble decision trees. Not Published.
M.
´
A. De Miguel, J. M. A. and Garcia, F. (2022). Vehi-
cles trajectory prediction using recurrent vae network.
IEEE Access, 10:32742–32749.
P. Rathore, D. Kumar, S. R. M. P. and Bezdek, J. C. (2019).
A scalable framework for trajectory prediction. IEEE
Transactions on Intelligent Transportation Systems,
20(10):3860–3874.
R. SenthilPrabha, D. Sasikumar, G. S. K. N. and Har-
ish, P. (2023). Smart traffic management system
through optimized network architecture for the smart
city paradigm shift. In 2023 International Confer-
ence on Intelligent Systems for Communication, IoT
and Security (ICISCoIS), pages 700–705. IEEE.
R. Wang, X. Song, Z. H. and Cui, Y. (2022). Spatio-
temporal interaction aware and trajectory distribution
aware graph convolution network for pedestrian mul-
timodal trajectory prediction. IEEE Transactions on
Instrumentation and Measurement, 72:1–1.
S. Gundreddy, R. Ramkumar, R. R. K. M. and Bakshi, S.
(2023). Perspective distortion model for pedestrian
trajectory prediction for consumer applications. IEEE
Transactions on Consumer Electronics.
S. Qiao, F. Gao, J. W. and Zhao, R. (2023). An enhanced ve-
hicle trajectory prediction model leveraging lstm and
social-attention mechanisms. IEEE Access.
T. Wu, P. Lei, F. L. and Chen, J. (2022). Space-time tree
search for long-term trajectory prediction. IEEE Ac-
cess, 10:117745–117756.
W. Zhu, Y. Liu, M. Z. and Yi, Y. (2023). Reciprocal con-
sistency prediction network for multi-step human tra-
jectory prediction. IEEE Transactions on Intelligent
Transportation Systems, 24(6):6042–6052.
X. Kong, Z. Xu, G. S. J. W. Q. Y. and Zhang, B. (2016). Ur-
ban traffic congestion estimation and prediction based
on floating car trajectory data. Future Generation
Computer Systems, 61:97–107.
X. Shan, W. Yu, Z. L. C. W. Y. R. and Zhang, J. (2023).
Vehicle trajectory-based traffic volume prediction on
urban roads with fast-communication license plate
recognition data. IEEE Transactions on Intelligent
Transportation Systems, 25(3):2768–2778.
Y. Li, Y. Jiang, Z. X. and Wu, X. (2024). Improv-
ing interaction-based vehicle trajectory prediction via
handling sensing failures. IEEE Sensors Journal.
Y. Lv, Y. Duan, W. K. Z. L. and Wang, F. Y. (2014). Traf-
fic flow prediction with big data: A deep learning ap-
proach. IEEE Transactions on Intelligent Transporta-
tion Systems, 16(2):865–873.
Y. Ma, X. Zhu, S. Z. R. Y. W. W. and Manocha, D. (2019).
Trafficpredict: Trajectory prediction for heteroge-
neous traffic-agents. In Proceedings of the AAAI Con-
ference on Artificial Intelligence, volume 33, pages
6120–6127.
Z. Wang, H. Zhang, C. Q. B. L. Y. C. and Jiang, M. (2024).
A hybrid lstm network for long-range vehicle trajec-
tory prediction based on adaptive chirp mode decom-
position. IEEE Sensors Journal.
Multi-Agent Trajectory Prediction for Urban Environments with UAV Data Using Enhanced Temporal Kolmogorov-Arnold Networks with
Particle Swarm Optimization
597
