
Improvement of PIBT-based Solution Method for Lifelong MAPD
Problems to Extend Applicable Graphs
Toshihiro Matsui
a
Nagoya Institute of Technology, Gokiso-cho Showa-ku Nagoya Aichi 466-8555, Japan
Keywords:
Multiagent Pathfinding Problem, Lifelong Multiagent Pickup-and-Delivery Problem, PIBT, Swap Operation.
Abstract:
We address an extension of priority inheritance with backtracking (PIBT) for lifelong multiagent pickup-and-
delivery (MAPD) problems that performs a swap operation integrated into the original algorithm to adapt
specific extended case problems. The multiagent pathfinding (MAPF) problem has been widely studied as a
basis for various practical multiagent systems. PIBT is a scalable and on-demand solution method for con-
tinuous MAPF problems, where each agent determines its next move in each time step by locally solving
agent-move collisions. Since it can be applied to limited cases such as biconnected graphs, several extensions
using additional techniques have been suggested. However, there are opportunities to extend the PIBT process
with several techniques that can be integrated into the solution process itself. As the first step, we extend a so-
lution method based on PIBT for lifelong MAPD problems, fundamental continuous problems, by integrating
a specific swap task. We address detailed techniques, including additional management of priorities, subgoals,
and states of agents. We also experimentally evaluate the proposed approach with several problem settings.
1 INTRODUCTION
We address an extension of priority inheritance with
backtracking (PIBT) (Okumura et al., 2022; Oku-
mura et al., 2019) for lifelong multiagent pickup-and-
delivery (MAPD) problems that performs a swap op-
eration integrated into the original algorithm to adapt
specific extended case problems. The multiagent
pathfinding (MAPF) problem has been widely stud-
ied as a basis for various practical multiagent systems,
including robot navigation, autonomous carriers in
warehouses and construction sites, autonomous taxi-
ing of airplanes and video games (Ma et al., 2017).
This problem is a combinatorial optimization prob-
lem finding a set of agents’ paths, where all the agents
must move from their start locations to their goal lo-
cations without colliding with each other. The set of
paths should be minimized by optimization criteria.
Several types of solution methods for MAPF prob-
lems, including optimal and quasi-optimal methods,
have been developed. A major optimal approach is
based on variants of Conflict Based Search (Sharon
et al., 2015), which performs two layers of search.
There are several optimal and quasi-optimal extended
variations (Ma et al., 2019; Barer et al., 2014) that
a
https://orcid.org/0000-0001-8557-8167
address the mitigation of the relatively high computa-
tional cost of the optimal search method.
A different greedy approach individually finds and
reserves the single quasi-optimal path in a time-space
graph for each agent according to an order on all
the agents (Silver, 2005). There are also different
approaches, including push, swap, and rotate opera-
tions among agents (De Wilde et al., 2014; Luna and
Bekris, 2011), and general optimization methods.
The MAPF problem has been extended to the con-
tinuous MAPF problem, where each agent updates its
sequence of subgoals, and a MAPF method is repeat-
edly performed for the sequences. The lifelong multi-
agent MAPD problem is an important class of con-
tinuous MAPF problems, where each agent repeat-
edly performs pick-up and delivery tasks (Ma et al.,
2017). While a scalable quasi-optimal approach for
this problem is based on a theorem regarding the end-
points of agents’ paths (Ma et al., 2017), there are sev-
eral challenges to improving the performance of solu-
tion methods (Li et al., 2021; Yamauchi et al., 2022).
We focus on PIBT that is a solution method for
continuous MAPF problems, where each agent de-
termines its next move in each time step by locally
solving collisions of agents’ moves. PIBT performs
a management of priorities of agents and a dedicated
back-tracking method. Although it can be applied to
Matsui, T.
Improvement of PIBT-based Solution Method for Lifelong MAPD Problems to Extend Applicable Graphs.
DOI: 10.5220/0013243800003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 123-134
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
123

limited cases such as biconnected graphs, the method
can work with narrow aisles and dense populations
of agents. There are several extensions of PIBT us-
ing additional techniques (Okumura et al., 2019), in-
cluding methods addressing more general cases of
graphs (Okumura et al., 2022; Okumura, 2023). How-
ever, these methods basically employ external exten-
sions where PIBT can be considered a module. There
are opportunities to extend the PIBT with techniques
that can be integrated into the solution process itself.
This consideration is important to understand the
detailed properties of the original solution method and
to uncover some informative insights to improve the
solution method or some heuristics. As the first step,
we extend a solution method based on PIBT for life-
long MAPD problems, fundamental continuous prob-
lems, by integrating a specific swap task.
We add a high-level layer of tasks to PIBT to man-
age individual cooperation tasks of groups of agents.
Namely, we employ PIBT as a processing engine and
introduce a context of a swap task of an individual
group of agents. The tasks are independently con-
structed in a bottom-up manner, and their conflict sit-
uations are solved using their priority values. As the
first study, we present the swap tasks of agents for a
class of problems that can be naturally extended from
that for the original PIBT. The approach to execute
such bottom-up tasks of agents on a fundamental so-
lution method as an engine is the major aim of this
study.
We address detailed techniques, including addi-
tional management of priorities, subgoals and states
of agents. We also experimentally evaluate the pro-
posed approach with several problem settings.
In the next section, we present the background of
our study, including multiagent pathfinding problems,
lifelong pickup-and-delivery problems, and the solu-
tion method PIBT. The details of our proposed ap-
proaches are described in Section 3. We first consider
some important graph structures of maps and then
establish a set of operations regarding specific swap
tasks to address dead-end aisles. We experimentally
verify our approach in Section 4 and conclude in Sec-
tion 5.
2 BACKGROUND
We note that several segments in the following sub-
sections are based on the literature (Matsui, 2024b)
with the same background in part, although the aim
of this study is completely different from the previous
work.
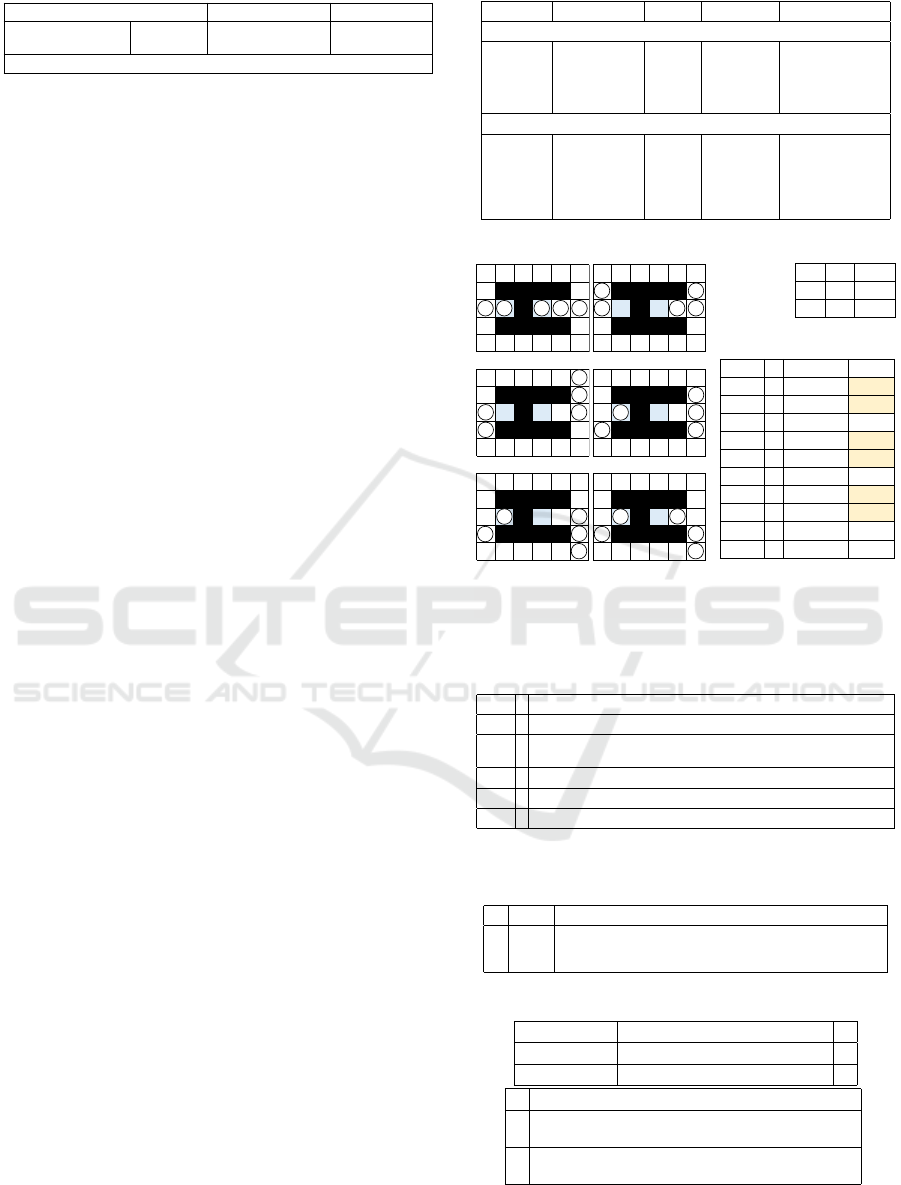
. . . . . .
. O O O O .
. T O T . .
. O O O O .
. . . . . .
. . . . . .
. O O O . .
. T O T . .
. O O O O .
. . . . . .
. T T T T .
. O O O O .
. T T T T .
. O O O O .
. T T T T .
Solvable with PIBT Unsolvable with PIBT
. T T T T .
. O O O O .
. T T T T .
. O O O O .
. T T T T .
. . . . . .
. O O O O .
. T O T . .
. O O O O .
. . . . . .
Intersections and aisles With a square
Pickup-and-delivery location
Obstacle
O
T
Intersection
. . . . . .
. O O O . .
. T O T . .
. O O O O .
. . . . . .
Square
Figure 1: Warehouse map and decomposed structures.
2.1 MAPF and Lifelong MAPD
The multiagent pathfinding (MAPF) problem is an
optimization problem for finding a set of paths of
multiple agents where there are no collisions between
the paths. A MAPF problem consists of a graph
G = (V, E) representing a two-dimensional map, a set
of agents A , and a set of pairs of vertices that repre-
sent the start and goal locations for individual agents.
All agents must move from their start locations to
their goal locations without colliding with each other,
and the set of agents’ paths, including stay/wait ac-
tions, should be minimized by optimization criteria.
There are two types of collision paths to be avoided;
two agents must not stay at the same location at the
same time (a vertex collision) and must not move on
the same edge at the same time from both ends of the
edge (a swapping collision). In a fundamental set-
ting, a graph representing a four-connected grid-like
map containing obstacles is employed, and time steps
are discrete. The continuous MAPF problem is an ex-
tended class of MAPF problems where each agent up-
dates its sequence of subgoals, and a solution method
for MAPF is repeatedly performed for the sequences.
The lifelong multiagent pickup-and-delivery
(MAPD) problem (Ma et al., 2017) is a specific
class of continuous MAPF problems, where multiple
pickup-and-delivery tasks are repeatedly allocated to
agents. Figure 1 shows examples of warehouse maps
containing pickup-and-delivery locations. The tasks
can be repeatedly generated in arbitrary time steps.
A set of currently generated tasks is denoted by T .
Task τ
i
∈ T has its pickup and delivery locations
(s
i
,g
i
), where s
i
,g
i
∈ V . An agent who is allocated to
task τ
i
first moves from its current location to pickup
location s
i
and then moves to delivery location g
i
to complete the task. The problem consists of task
allocation and continuous MAPF problems. At least
partially greedy approaches are commonly employed
to allocate tasks generated on demand, and MAPF
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
124

1 UNDECIDED← A(t) // agents list
2 OCCUPIED←
/
0 // vertices list
3 update priorities p
i
(t) for all agents a
i
4 while UNDECIDED̸=
/
0 do
5 a ← the agent with the highest priority in UNDECIDED
6 PIBT(a,⊥) // ⊥ denotes empty
7 end while
9 function PIBT(a
i
,a
j
)
10 UNDECIDED←UNDECIDED\{a
i
}
11 C
i
← ({v|(v
i
(t),v) ∈ E} ∪{v
i
(t)})
12 \({v
j
(t)}∪OCCUPIED)
13 while C
i
̸=
/
0 do
14 v
∗
i
← arg max
v∈C
i
f
i
(v) // most preferred move
15 OCCUPIED←OCCUPIED∪{v
∗
i
}
16 if a
k
s.t. v
∗
i
= v
k
(t) ∧ a
k
∈UNDECIDED exists then
17 if PIBT(a
k
,a
i
) is valid then
18 v
i
(t + 1) ← v
∗
i
19 return valid // move with push
20 else
21 C
i
← C
i
\OCCUPIED
22 end if
23 else
24 v
i
(t + 1) ← v
∗
i
25 return valid // move/stay without push
26 end if
27 end while
28 v
i
(t + 1) ← v
i
(t)
29 return invalid // stay by failing to move
30 end function
v
i
(t): location of agent a
i
at time step t
Figure 2: PIBT at time step t (Okumura et al., 2022).
solvers are applied to the pathfinding.
A fundamental approach is based on the well-
formed MAPD problems that take into account end-
point vertices, which can be pickup, delivery, or park-
ing locations of agents (
ˇ
C
´
ap et al., 2015; Ma et al.,
2017). However, this requires extra aisle space in
maps and relatively large redundancy of parallelism
on task execution including agents’ movements.
We focus on a different type of solution method,
PIBT (Okumura et al., 2022), that can be applied to
narrow maps with dense populations of agents, al-
though this method is also a greedy approach with
several restrictions as mentioned below.
2.2 PIBT
PIBT is a scalable solution method for the (contin-
uous) MAPF problem (Okumura et al., 2022). The
method performs push operations among agents ac-
cording to the priority of the agents. In each time step,
each agent decides its next move/stay. When an agent
cannot push other agents on all vertices neighboring
its current location, a backtracking is performed to
find other push chains.
In the pseudo code (Fig. 2), it is assumed that each
agent a
i
has its goal location, and the preference value
of location v based on the goal is represented by f
i
(v)
(line 14). The priority p
i
(t) of agent a
i
consists of
the elapsed time for the current goal and a small tie-
break value based on a
i
’s identifier. Agent a having
the locally highest priority initiates a recursive push
process (line 6). Agent a
i
selects its most preferred
move from those remaining and pushes its neighbor-
ing agent to clear a vertex if necessary (lines 14-17).
The pushed agent a
j
tries to move to its neighboring
vertex and also pushes a
j
’s neighboring agent if nec-
essary. If all the agents pushed by agent a
i
can move
or there is no agent obstructing a
i
, a chain of moves is
determined (line 18). As a result, the locations of a set
of agents in a cycle might rotate. If one of the pushed
agents cannot move, backtracking is performed (line
29) so that its parent agent can try to move in a dif-
ferent direction. An agent that cannot move in this
process stays in its current location (line 28).
PIBT can solve problems represented by several
types of graphs, including biconnected ones, that al-
ways allow the rotation of agents’ locations. The
method can work with narrow aisles and dense popu-
lations of agents, even if all non-obstacle vertices are
occupied by agents. However, it easily sticks in the
case of maps with dead ends.
In the case of continuous problems, each agent has
its list of subgoals and continues to move to the first
subgoal with increasing its priority. After reaching the
first subgoal, the subgoal is removed from the list and
the priority of the agent is reset. For MAPD prob-
lems, we employ a baseline greedy task allocation
method in which each agent having no tasks selects
a task whose pickup location is nearest to its current
location.
3 SPECIFIC SWAP TASK
We improve PIBT for an extended case where un-
branched narrow aisles with single dead-ends (DE
aisles) are added to a basic map represented by a bi-
connected graph that can be well handled by the orig-
inal algorithm. This is the minimal extension to in-
troduce a specific case of swap operation (De Wilde
et al., 2014; Luna and Bekris, 2011) based on PIBT.
When an agent is blocking another agent in a DE
aisle, both agents can retreat from the aisle to swap
their locations. Specifically, in the case of PIBT, a
reasonable action is to perform the swap operation of
the agents on a biconnected component of a graph by
simply employing PIBT itself (Fig. 5). Although this
is intuitively simple, our aim is to clarify the details of
several important extensions in this kind of algorithm
for future study to address more general cases.
Improvement of PIBT-based Solution Method for Lifelong MAPD Problems to Extend Applicable Graphs
125
Swap task MAPD task Idle state
One
-push sequence
Move
dir. const./pref.
Retreat task
Subgorl
: r
i
Pickup
-delivery task
Subgoals: (s
i
, g
i
)
Stay task
Subgoal
: cur. loc.
PIBT for continuous MAPF
Figure 3: Tasks on PIBT.
3.1 Decomposition of Map Structure
We address the extended case where the undirected
graphs of maps consist of a biconnected component
and several parts of DE aisles. To concentrate on a set
of important operations naturally extending PIBT to
adapt to this case, we do not consider without cycles
and with isthmuses (De Wilde et al., 2014) cases, and
we will address such general cases that require sev-
eral additional techniques in future study. While we
employ graphs representing maps in a four-connected
grid world as common settings, our approach can be
extended for non-grid maps.
Except for obstacle vertices, we decompose the
parts of a graph into the following structures: 1) Aisle
including DE aisle, 2) Intersection vertex, including
end vertices of a square, connecting to aisles, and 3)
Other part of square (Fig. 1). Since PIBT works effec-
tively for parts with sufficient space such as squares,
we distinguish the narrow parts from others and im-
prove the original algorithm by adding several opera-
tions that consider such narrow parts.
An aisle consists of vertices whose degrees are
one (DE aisle) or two. In the case with squares, cor-
ner vertices whose degrees are two are excluded. An
intersection vertex’s degree is greater than two. The
definition of square depends on the graphs. For a four-
connected grid map, a square is a cluster of minimum
cycles of the neighboring four vertices, although we
distinguish intersection vertices from them.
Here, we employ the following simple preprocess-
ing to extract the parts: 1) Vertices whose degrees
are one or two are marked as candidate vertices of
aisles. 2) Vertices whose degrees are greater than two
are marked as vertices of intersections. 3) Candidate
vertices of aisles are excluded as a part of a square if
they are contained in one of the minimum cycles. 4)
Decomposed parts and corresponding vertices except
that of squares are labeled with individual values to
refer to each other in later steps. The map structure
and the map data are shared by all the agents.
3.2 Integrating Specific Swap Operation
We introduce a set of operations for a specific swap
task into a version of PIBT that solves lifelong MAPD
problems. Since this baseline version has been inte-
grated with a task assignment process for pickup-and-
delivery tasks, we added another extension for a swap
Initiator Target Swept (Controller) (Interruption)
Swap task
(Ask) Initiator
Ini-restraint Retreat Swept Target Cancel, (one push)
Restraint Cancel, (one push)
Restraint Initiator Cancel
(Complete)
One push sequence for highest swap task only
(Ask) Target
One push Initiator
OP-Retreat Swept Target
Restraint
Restraint
(OP-Complete) (To Initiator)
Figure 4: Sub-modes and sequence in swap task.
Init.
Tgt.
Swept
a
4
a
2
a
3
a
1
a
0
. . . . . .
. O O O O .
. T O T . .
. O O O O .
. . . . . .
a
1
a
0
a
3
a
4
a
2
. . . . . .
. O O O O .
. T O T . .
. O O O O .
. . . . . .
a
1
a
0
a
3
a
4
a
2
. . . . . .
. O O O O .
. T O T . .
. O O O O .
. . . . . .
a
1
a
0
a
3
a
4
a
2
. . . . . .
. O O O O .
. T O T . .
. O O O O .
. . . . . .
a
1
a
0
a
3
a
4
a
2
t =0 t =1
t =2
t =3
t
a
i
Sub
-
mode
p
i
(t)
0
a
4
Init
-
Rstrnt.
=
p
2
(t
)
a
2
Retreat
=
p
4
(t
)
a
3
Swept
p
3
(t)
1
a
4
Init
-
Rstrnt.
=
p
2
(t
)
a
2
Retreat
=
p
4
(t
)
a
3
Restraint
p
3
(t)
2, 3, 4
a
4
Init
-
Rstrnt.
=
p
4
(t
)
a
2
Restraint
=
p
2
(t
)
a
3
Restraint
p
3
(t)
5
*
Completed
*
Swap tasks
Progress of a
4
's
. . . . . .
. O O O O .
. T O T . .
. O O O O .
. . . . . .
a
1
a
0
a
3
a
4
a
2
. . . . . .
. O O O O .
. T O T . .
. O O O O .
. . . . . .
a
1
a
0
a
3
a
4
a
2
t =4
t =5
p
1
(t) > p
0
(t)
p
4
(t) > p
2
(t), p
3
(t)
=p
i
(t) : originally a
i
's priority at every time step
p
i
(t) uniformly increases at every time step.
Figure 5: Swap task.
Table 1: Constraint/preference of move direction f
i
(v).
Ds P Baseline: move on the shortest path to the first subgoal.
Dad P Avoid DE aisles without the first subgoal.
Dadrc C Avoid resolving DE aisle in a restraint mode.
Dadrp P Avoid resolving DE asl. in a rstrnt. mod. for higher swp. tsks.
Dado C Avoid other DE aisles if the initiator of the top most swap task.
Dl C Move on the limited path in a one-push sequence.
Dap P Option: Avoid the asl. on the first pusher’s path (Matsui, 2024b).
P/C: Preference/Constraint
Priority: Dl > Dado > Dadrp > Dadrc > Dad > Dap > Ds
Table 2: Completion/cancel of swap task.
Ce Cmpl. The initiator entered the resolving DE aisle.
Co Cancel The task is to be overwritten.
Cp Cancel A restraint agent was pushed into the resolving DE aisle.
Ch Cancel The initiator in one of other DE aisles became the highest.
Table 3: Acceptable number of agents.
Co, Ce Dadrc, Dad, Ds N
b
Cp, Co, Ce Dadrp, Dadrc, Dad, Ds N
t
Ch, Cp, Co, Ce Dl, Dado, Dadrp, Dadrc, Dad, Ds N
s
N
b
The num. of vertices in the biconnected component.
N
t
(The num. of non-obstacle vertices) − (the num. of
vertices in the longest pair of two DE aisles).
N
s
(The num. of non-obstacle vertices) − (the num. of
vertices in the longest DE aisle).
task assignment, as shown in Figs. 3-5 and Tbls. 1-3.
The extended pseudo codes are shown in Fig. 9 in an
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
126

appendix section. The life cycle of a swap task con-
sists of several sub-modes that basically representing
initiation, retreat, restraint and complete/cancel steps
(Fig. 4). The agents related to a swap task are cate-
gorized into three types: initiator, target, and swept
agents (Fig. 5). The control of a swap task basically
consists of the state transition of sub-modes (Fig. 4), a
priority inversion between the initiator and the target,
additional preferences/constraints on the evaluation of
agents’ moves f
i
(v) (Tbl. 1), and several cancel rules
to resolve conflicted tasks (Tbl. 2). Several possible
combinations of the rules affect the acceptable num-
ber of agents (Tbl. 3).
In the following, we describe several details of our
approach. We first address the member of cooperative
swap tasks (Section 3.2.1). Then the basic flow of
the task, including related contexts, is presented (Sec-
tions 3.2.2- 3.2.7). Finally, additional rules are intro-
duced to extend applicable cases of the basic method
(Sections 3.2.8 and 3.2.9).
3.2.1 Initiator, Target and Swept Agents
When agent a
i
, whose first subgoal is in a DE aisle,
detects a possible deadlock situation, a swap task is
initiated by agent a
i
. This situation is detected in the
process of PIBT as agent a
i
cannot push its next agent
located in the DE aisle before arriving at a
i
’s first sub-
goal. Although such a situation might be inexact due
to some perturbation of a system dependent on PIBT,
we accept it as a margin for a bottom-up approach.
An agent can be an initiator primarily in the fol-
lowing two cases. 1) An agent who is at an intersec-
tion and entering a DE aisle containing its first sub-
goal. 2) An agent who is not being pushed and mov-
ing in a DE aisle containing its first subgoal. TA) It
is possible to further restrict the former case with the
condition that the agent is not being pushed.
Target agent a
j
is in a push chain and asked to re-
treat from a DE aisle by initiator agent a
i
when target
agent a
j
’ is blocking the first subgoal of a
i
. In addi-
tion, other agents between initiator agent a
i
and target
a
j
in a push chain are also marked as swept agents
that are dug by target agent a
j
(Fig. 5).
3.2.2 Initiation of Swap Task
To maintain the consistency of priority values among
agents, we allow each agent a
i
to initiate a swap task
only if agent a
i
has a priority value higher than the tar-
get, all swept agents, and all their initiator (controller
in general cases) agents if any. For a
i
itself, it must not
have a swap task initiated by an agent with a higher
priority value, while a
i
can overwrite its own swap
task. In addition, a
i
cannot initiate a swap task dur-
ing a specific critical section in a one push sequence
discussed in Section 3.2.9. If an agent cannot find
the target and swept agents satisfying the conditions
above, the agent cannot initiate the swap task until its
possible turn.
The initiation operation differs partially for target
and swept agents. For a target agent a
j
, a new re-
treat task with a new subgoal r
i
is inserted. Basically,
the retreat task must be done before a
j
’s pickup-and-
delivery task if it has the task
1
. The new subgoal
is the intersection adjacent to the DE aisle. Moreover,
the priority values of the initiator and the target are ex-
changed so that the priority of the target is higher than
the initiator. We allocate a retreat task only to a target
agent to clarify the role of agents (Figs. 4 and 5).
3.2.3 Context of Swap Task
All member agents, including initiator a
i
, target and
swept ones, of a swap task that is initiated by agent
a
i
record 1) the identifiers of the initiator and target
agents and 2) a vertex of retreat intersection identi-
cal to the subgoal r
i
of the target agent’s retreat task.
One of initiator and target agents with higher prior-
ity is distinguished as 3) a controller of a swap task
that can push its other members. An initiator also
has 4) a set of identifiers for all members of its swap
task. With this information, the initiator can notify its
members of the completion/cancel of its swap task.
Other members can ask their initiator to cancel their
task, if necessary (Fig. 4). Each agent can be a mem-
ber of at most one swap task. Therefore, the initia-
tion and completion/cancel of each swap tasks must
be atomic. Note that an initiated task can be over-
written by another initiator with a higher priority or
the original initiator itself. In this case, the former
task must be canceled to remove its shared informa-
tion before the initiation of the new task, and that must
also be atomic. Although this is slightly complicated,
such procedures can be composed without contradic-
tion. We implemented this process with procedures of
individual agents that are called by related agents to
update their status at appropriate timings in the main
process of PIBT (in part of task initiation/termination
lines in Fig. 9).
3.2.4 Retreat, Restraint and Completion Phases
After the initiation, target and swept agents imme-
diately change their sub-modes to retreat and swept
modes, while the initiator changes to a specific re-
straint mode (Fig. 4, and t = 0 in Fig. 5). These
1
We slightly optimized this so that a
j
’s subgoal is pro-
cessed at first if a
j
just locates at its subgoal (Lines 48, and
49 in Fig. 9).
Improvement of PIBT-based Solution Method for Lifelong MAPD Problems to Extend Applicable Graphs
127

additional operations are performed in the process of
PIBT (Fig. 9). The role exchange among initiator and
target agents depends on a priority management but
we separately describe its details in the next section.
As mentioned above, we allow the agents to ini-
tiate their possible swap tasks in time steps arbitrar-
ily, and an existing swap task might be overwritten.
Therefore, a swap task might be discarded without
completion, although such situations will converge
due to the consistent priority values among agents.
When a target agent arrives at the subgoal r
i
of its
retreat task, it completes the task and the priority val-
ues of the target and the initiator are exchanged. We
note that the priority value of the retreating target in-
creases at each time step in the manner of PIBT, while
the priority is not reset after the retreat task. Then, the
corresponding initiator agent recovers its dominance
at least over its member agents (t = 2 in Fig. 5).
In addition, when each of the target and swept
agents arrive at the retreat intersection identical to the
subgoal r
i
of the target agent’s retreat task, each agent
changes to the restrained mode. The agents are then
inhibited from reentering the DE aisle from which
they have retreated. During this period, the corre-
sponding initiator agent can push the target and swept
agents except for into the DE aisle of its first subgoal
in the manner of PIBT.
When an initiator agent enters the DE aisle with
its first subgoal, the initiator notifies its members of
the completion of the swap task (t = 5, a
4
in Fig. 5).
Then, each corresponding target and swept agent exits
from the restrained mode and discards the swap task
asked by the initiator. If other non-member agents
enter a DE aisle during a swap task due to parallel
moves of agents, a new swap task will drive the agents
away.
3.2.5 Priority Management for Swap
As mentioned above, we allow each agent a
i
to initiate
a swap task only if agent a
i
has a priority value higher
than the target, all swept agents, and all their initia-
tor (controller) agents if any. For a
i
itself, it must not
have a swap task initiated by an agent with a higher
priority value, while a
i
can overwrite its own swap
task. In addition, a
i
cannot initiate a swap task dur-
ing a specific critical section in a one push sequence
shown in Section 3.2.9. We permit agents to repeat-
edly ask to swap in arbitrary time steps if necessary.
Before an agent initiates a new swap task, its old swap
task is canceled if one exists.
As a result of the initiation of a swap task, the tar-
get agent to retreat must have a priority higher than
its initiator agent. The operation must also not affect
other agents. For this priority management, we em-
ploy a priority inversion technique between the initia-
tor and the target of a swap task in this study. Al-
though this is an intuitive idea, we found that the
priority inversion raises several complicated issues in
handling agents’ information
2
. Since the controller
agent with the highest priority in a swap task switches,
we must always carefully identify the controller agent
to evaluate the exact priority value of a swap task. The
inversion must also be applied in all cases of cancel-
ing swap tasks. The inversion is immediately shared
by all members to be decided in the same push chain
in initiation cases, but can affect decided/undecided
agents in other cases. This requires an additional mu-
tex in the one push sequence shown in Section 3.2.9.
We also note again that the priority value of a target
agent increases during its retreat task, while the prior-
ity is not reset at the end of the task so that the priority
value is returned to its original owner (an initiator).
The same applies to another priority.
3.2.6 Subgoal to Retreat
For target agent a
j
of a swap task, a retreat task with
a subgoal vertex r
i
is inserted as a
j
’s first task. The
subgoal vertex r
i
to retreat is the intersection adjacent
to a DE aisle from which a
j
is retreating. We pro-
hibit retreating agents, including swept agents, from
allocating their new pickup-and-delivery tasks if they
do not have pickup-and-deliver tasks. Therefore, the
retreat task is always prior to the pickup-and-delivery
tasks of the target and swept agents.
Even though the target agent’s first subgoal of its
pickup-and-delivery task is outside of its current aisle,
we always insert a new retreat task because it re-
lates several other controls of the swap/retreat task.
However, if a target agent is newly asked by another
agent with a higher priority value to swap, the current
swap/retreat task is canceled by asking its initiator be-
fore it is overwritten by that of the new swap task.
3.2.7 Limitation of Reentering DE Aisle
After the target and swept agents of a swap task move
to the intersection adjacent to the corresponding DE
aisle, they must not reenter the DE aisle. The agents
change their sub-modes to the restraint mode to in-
hibit such reentering moves ((Figs. 4 and 5). Al-
though it is possible to simply confine all restrained
agents, inside of the biconnected component of a
graph, this only well works with the number of agents
up to the number of vertices within the biconnected
component N
b
(Tbl. 3). Instead, it is reasonable to in-
hibit only reentering a DE aisle related to the current
2
In an appendix section, we mention another solution
depending on monotonically increasing priority values.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
128
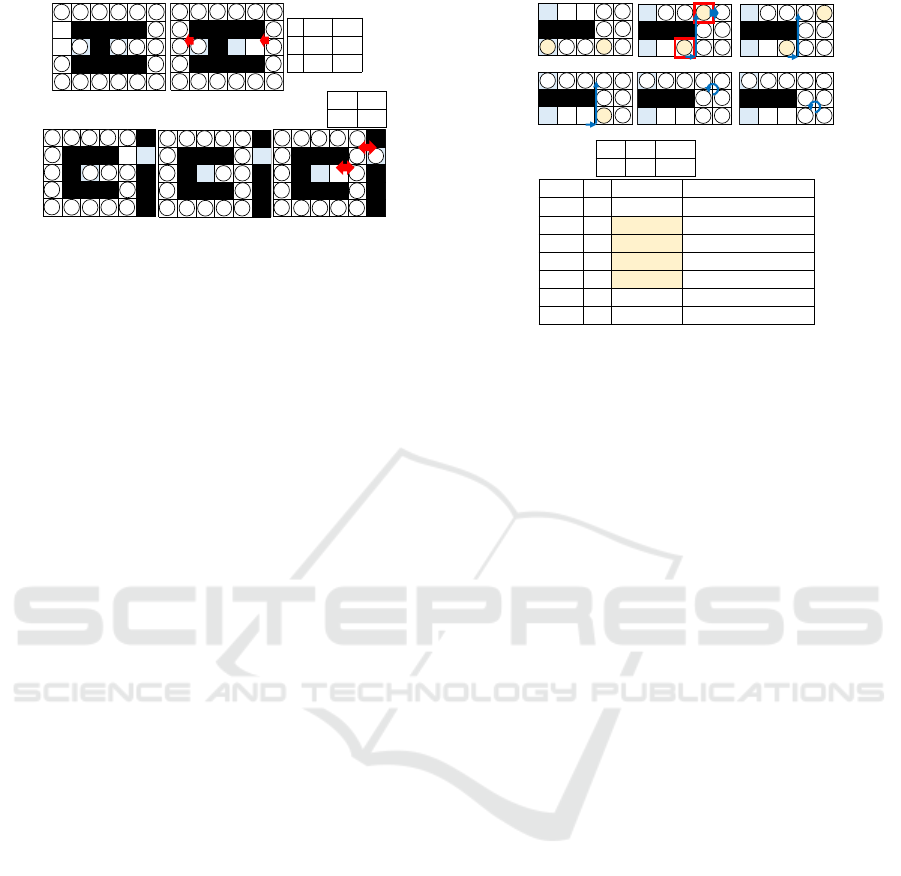
(ii) Necessity of Dado
. . . . . O
. O O O . T
. O T . . O
. O O O . O
. . . . . O
a
0
a
1
a
2
t =0
. . . . . O
. O O O . T
. O T . . O
. O O O . O
. . . . . O
a
0
a
1
a
2
t =1
Init.
Tgt.
a
2
a
0
Swap task
. . . . . O
. O O O . T
. O T . . O
. O O O . O
. . . . . O
a
0
a
1
a
2
t =2
t
Init.
Tgt.
0
a
1
a
0
4
a
3
a
2
Swap tasks
p
1
(t) < p
3
(t)
. . . . . .
. O O O O .
. T O T . .
. O O O O .
. . . . . .
a
0
a
1
a
3
a
2
t =0
. . . . . .
. O O O O .
. T O T . .
. O O O O .
. . . . . .
a
1
a
0
a
3
a
2
t =4
(i) Necessity of Dadrp and Cp
Figure 6: Necessity of extended rules.
swap task. Here, we control the movement direction
of agents. Such restriction can be represented by a
preference value (Dad) for each movement direction
or a hard constraint to exclude such a move (Dadrc)
shown in Tbl. 1.
In general, an agent at an intersection should not
enter any DE aisle that does not contain its first sub-
goal regardless of its mode. This is represented by the
preference value of the movement direction as a ba-
sic extension (Dad), and this preference value must be
evaluated prior to the original values of f
i
(v) and must
not be evaluated prior to other extended constraints
and preference values. Most importantly, in the case
of restrained agents, the choice of inhibited reentering
is eliminated from their movement direction (Dadrc).
The restrained mode of a target/swept agent is held
until the completion/cancel of the swap task.
3.2.8 More Extended Rules
However, the set of rules above well works with up
to N
b
agents (Tbl. 3). With the number of agents
over N
b
, the parallel moves of agents due to PIBT can
cause a dead-lock situation. In the case of t = 4 shown
in Fig. 6 (i), target agent a
2
tries to retreat, and another
target a
0
having a lower priority value blocks a
2
by
avoiding a
0
’s own inhibited DE aisle. To resolve this
situation, we modify the rule as follows: If restrained
agent a
i
is pushed at an intersection and the first agent
in the push chain has a priority value higher than a
i
’s
controller agent, the limitation of reentering a
i
’s in-
hibited DE aisle is considered by a preference value
(Dadrp) rather than a hard constraint. As the result,
a
i
is pushed into its inhibited DE aisle and asks to is
initiator to discard the swap task (Cp). Since we allow
parallel execution of swap tasks, this rule is necessary
to discard a lower priority task in a race condition.
Above rules are summarized in Tbls. 1-3.
By adding rules of Dadrp and Cp, the solution pro-
cess works with up to N
t
agents (Tbl. 3). This limi-
tation assures that a pair of an initiator and a target
of the topmost swap task can stay in the biconnected
Init.
Tgt.
Swept
a
3
a
0
a
1
, a
2
t
a
i
Sub-mode
p
i
(t)
0, 1, 2
a
0
Retreat
p
1
(t), p
2
(t), p
3
(t) < p
0
(t
)
3 a
0
Retreat/Ask
4 a
3
One push
p
0
(t), p
1
(t), p
2
(t) < p
3
(t
)
a
0
OP
-
Retreat
5 a
0
OP
-
Retreat
p
1
(t), p
2
(t), p
3
(t) < p
0
(t
)
6 a
3
Restraint
p
0
(t), p
1
(t), p
2
(t) < p
3
(t
)
8 a
3
To be cmplt.
Swap task
Progress
この例ではa1が逆進入を阻止する
a0が押し込まれても,a2が空けたところに押し込める.
最短経路は細い袋小路と距離マップの工夫で整合.袋小路から押さない一般化では押された分の更新が必要.
T . . . .
O O O . .
T . . . .
t =0
a
3
a
2
a
1
a
0
T . . . .
O O O . .
T . . . .
t =1
a
3
a
2
a
1
a
0
T . . . .
O O O . .
T . . . .
t =2 ,3
a
3
a
2
a
1
a
0
T . . . .
O O O . .
T . . . .
t =4
a
3
a
1
a
2
a
0
T . . . .
O O O . .
T . . . .
t =5
a
3
a
1
a
2
a
0
T . . . .
O O O . .
T . . . .
t =6
a
3
a
1
a
2
a
0
T . . . .
O O O . .
T . . . .
t =8
a
1
a
0
a
2
a
3
T . . . .
O O O . .
T . . . .
t =0
a
3
a
2
a
1
a
0
T . . . .
O O O . .
T . . . .
t =4
a
3
a
1
a
2
a
0
T . . . .
O O O . .
T . . . .
t =5
a
3
a
1
a
2
a
0
T . . . .
O O O . .
T . . . .
t =2,3
a
3
a
2
a
1
a
0
T . . . .
O O O . .
T . . . .
t =7
a
3
a
2
a
1
a
0
T . . . .
O O O . .
T . . . .
t =6
a
3
a
1
a
2
a
0
T . . . .
O O O . .
T . . . .
t =8
a
1
a
0
a
2
a
3
Figure 7: One push sequence.
component. With the number of agents over N
t
, the
initiator of the topmost swap task can be pushed into
a DE aisle. Under this situation, if one of member
agents blocks its inhibited DE aisle and there is no
room for the initiator to back to the biconnected com-
ponent, the system sticks (Fig. 6 (ii)). We can add a
rule so that the initiator of the topmost swap task al-
ways avoids DE aisles except for that of its subgoal
(Dado). However, two issues still remain. First, an
initiator in a DE aisle might be promoted to that of
the topmost swap task. For this case, we force the ini-
tiator to cancel its swap task and to retry from the cur-
rent situation (Ch), and the topmost agent eventually
completes its task. The second issue shown below is
a self-lock situation in the topmost swap task.
3.2.9 One Push Sequence
We introduce the final extension that is a special mode
in a swap task with the highest priority. The rule of
Dado prevents the initiator of the topmost swap task
from entering other DE aisles during the retreat task
phase in its swap task. Instead of that, there can be
a type of deadlock situations in the case of the num-
ber of agents greater than N
t
. This situation is always
identical where the initiator of the topmost swap task
blocks up to two DE aisles containing at least one un-
occupied vertex by staying an intersection connect-
ing to the DE aisles, and other DE aisles except for
the resolving one have been already occupied. As the
result, the corresponding target agent of the topmost
swap task cannot push and sticks in a DE aisle (T = 3
in Fig. 7).
To solve this problem, we introduce a special one
push sequence where the sticking target agent asks to
its initiator to one push to retreat from the blocked in-
tersection (Fig. 4 and the case of T = 3-5 in Fig. 7).
Since the initiator is in the biconnected component,
Improvement of PIBT-based Solution Method for Lifelong MAPD Problems to Extend Applicable Graphs
129

it can always move. After that, the target can push a
set of agents into an unoccupied DE aisle. Here, the
priority inversion between the initiator and the target
agent is applied twice to exchange the control priv-
ilege of their swap task. We note that this priority
inversion can be performed between an initiator de-
ciding its one push action and a target that does not
immediately decide its next action
3
. Therefore, the
chances where a non-member agent inverts the one
push must be inhibited with a mutex to protect this
critical section. We simply force remaining agents to
stay in their current location at this time step so that
the target cannot be interrupted. In the next time step,
the target has the highest priority and can correctly
push before others’ actions.
In addition, we introduce a special retreat mode
following the one push. In the push chain of the
PIBT process, each agent basically moves according
to its preference value f
i
(v), and it might invert the
one push action
4
. To avoid this situation, we force
the agents pushed by the target to move on the short-
est path from the current target’s location to the in-
tersection that has been released by the initiator (Dl)
(T = 3-5 in Fig. 7). Note that this restriction also af-
fects the initiator’s one push action by inhibiting its
move to an inverted direction. More importantly, the
target agent waiting for one push does not move. With
this rule, the target successfully completes its retreat
mode, and the solution process well works with the
number of agents up to N
s
(Tbl. 3) that is the theoret-
ical limit.
3.3 Correctness
We briefly sketch the correctness of our method for
appropriate settings.
Proposition 1. A swap task that is initiated by an
agent with the highest priority always completes.
Proof. All the tasks except for one with the highest
priority can be canceled when they conflict with an-
other task with a higher priority value. The mutex for
the special critical section at the end of one push se-
quence protects the role exchange between an initia-
tor and a target from an interruption by non-members’
pushes. Therefore, the swap task with the highest pri-
ority from its initiation is always completed.
Proposition 2. All agents have chances to be the one
with the highest priority.
3
Here, we do not prefer to reorder the agents in a queue
to be processed by the PIBT procedure in a single time step.
4
This only causes redundant moves of agents (but not
preferred), since at least one agent is pushed into an unoc-
cupied aisle.
Proof. A swap task with a temporal priority inversion
is performed under the priority of its original initiator
agent, and the initiator’s priority value increases ac-
cording to the manner of PIBT. Therefore, a priority
value of each agent still monotonically increases un-
til the agent reaches its first subgoal of a pickup-and-
delivery or stay task. All swap tasks are eventually
completed/canceled without resetting priority values,
and the highest one is always completed. Therefore,
all tasks, including swap tasks, eventually complete.
An agent that completes one of other tasks resets its
priority. Therefore, all agents have chances to act, and
all allocated tasks eventually complete.
We also note that the presented rules are com-
posed step by step in a lazy manner to find issues to
be addressed, and there are other solutions and oppor-
tunities to reduce some redundancy. Regarding the
completeness, at least there can be dead-lock situa-
tions if a system is incorrectly configured with an in-
appropriate number of agents. The time complexity
of the additional part in the PIBT process relates the
interaction/maintenance among agents’ states and that
is almost linear for the number of agents.
For the acceptable number of agents shown in Ta-
ble 3, the following intuitive proposition exists.
Proposition 3. In a map where DE aisles are added
to a basic map represented by a biconnected graph,
any swap tasks can be done in an appropriate se-
quence if the number of agents is not greater than N
s
,
where N
s
= (the number of non-obstacle vertices) −
(the number of vertices in the longest DE aisle).
Proof. If a group of agents performing a single swap
task can empty its resolving DE aisle, and if its ini-
tiator agent remains in a biconnected component of
the graph of map, the initiator agent can rotate the
agents in the biconnected component to move to the
DE aisle. For this reason, the number of unoccupied
vertices must not be less than that of the longest DE
aisle.
Therefore, the verification with N
s
agents is a goal
in this study.
4 EVALUATION
4.1 Settings
We experimentally verified several details of our ex-
tended techniques, since we currently concentrate on
an extension of PIBT for a specific case of life-
long MAPD problems. While there are several re-
lated scalable complete solution methods, including
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
130

. . . . . . . . . . . . .
. O O O O O . O O O O O .
. O T . . O . O . . T O .
. O O O . . . . . O O O .
. . . O O O . O O O . . .
. O . . T O . O T . . O .
. O O O O O . O O O O O .
. . . . . . . . . . . . .
4D-5L-1G-2
. . . . . . . . . . . . .
. O O O O O . O O O O O .
. O T T T O . O T T T O .
. O O O . . . O O O . . .
. . . O O O . . . O O O .
. O T T T O . O T T T O .
. O O O O O . O O O O O .
. . . . . . . . . . . . .
4D-5L-3G
. . . . . . . . . . . . . . . . . . . . . . . . .
. O O O O O . O O O O O . O O O O O . O O O O O .
. O T T T O . O T T T O . O T T T O . O T T T O .
. O O O . . . O O O . . . O O O . . . O O O . . .
. . . O O O . . . O O O . . . O O O . . . O O O .
. O T T T O . O T T T O . O T T T O . O T T T O .
. O O O O O . O O O O O . O O O O O . O O O O O .
. . . . . . . . . . . . . . . . . . . . . . . . .
. O O O O O . O O O O O . O O O O O . O O O O O .
. O T T T O . O T T T O . O T T T O . O T T T O .
. O O O . . . O O O . . . O O O . . . O O O . . .
. . . O O O . . . O O O . . . O O O . . . O O O .
. O T T T O . O T T T O . O T T T O . O T T T O .
. O O O O O . O O O O O . O O O O O . O O O O O .
. . . . . . . . . . . . . . . . . . . . . . . . .
. O O O O O . O O O O O . O O O O O . O O O O O .
. O T T T O . O T T T O . O T T T O . O T T T O .
. O O O . . . O O O . . . O O O . . . O O O . . .
. . . O O O . . . O O O . . . O O O . . . O O O .
. O T T T O . O T T T O . O T T T O . O T T T O .
. O O O O O . O O O O O . O O O O O . O O O O O .
. . . . . . . . . . . . . . . . . . . . . . . . .
T . O O O . T
O . . O . . O
O O . . . O O
O O . . . . T
T . . . . O O
O O . . . O O
O . . O . . O
T . O O O . T
159
. . . . . . . . . . . . .
. O O O O O . O O O O O .
. O T . . O . O T . . O .
. O O O . . . O O O . . .
. . . O O O . . . O O O .
. O . . T O . O . . T O .
. O O O O O . O O O O O .
. . . . . . . . . . . . .
254
255
T . O O . . . O
O . . . . O . T
O O O . . O O O
T . O . . . . O
O . . . . O . T
O O O . . O O O
T . O . . . . O
O . . . O O . T
281
500
14D-1L 4D-5L-1G
6D-1G
24D-5L-3G
274
291
6D-1G-2
* Results for 4D-5L-1G-2 and 6D-1G(-2) are eliminated due to space limitation.
. . . . . . . . . . .
. O O T O T O T O O .
. O T O T O T O T O .
. . . . . . . . . . .
. O T O T O T O T O .
. O O T O T O T O O .
. . . . . . . . . . .
Figure 8: Maps for benchmark problems.
PIBT+ (Okumura et al., 2022) and LaCAM (Oku-
mura, 2023), there appears to be additional opportuni-
ties to adjust/tune those methods for lifelong MAPD
problems. The Token-Passing algorithm for lifelong
MAPD problems is only available for well-formed
problems with the number of agents at most ((the
number of end points)−1) (Ma et al., 2017; Matsui,
2024a)
5
. To mitigate this limitation, we focused on
PIBT that is available with large number of agents in
narrow maps regardless endpoints and extended it to
address specific maps with dead ends. Here we con-
centrated on the extension of PIBT with additional
cooperative swap tasks among agents. TP-based solu-
tion methods cannot be applied or can be applied with
few agents in most problem settings in our study, and
such settings are the beneficial cases of PIBT variants.
Dense settings of agents in our experiment appear to
be impractical for general optimal search methods.
Within the context of PIBT, there are opportunities
to employ efficient techniques (Okumura et al., 2019;
Yamauchi et al., 2022). Since our current major in-
terest is the experimental verification of the correct-
ness of our extended rules, the performance compar-
ison with those methods will be separately addressed
in our future study.
For benchmark problems, we employed the maps
shown in Fig. 8 that might not be handled by the orig-
inal PIBT but can be with our approach. We varied
the number of agents up to the theoretical limit. For
MAPD problems, N pT tasks were randomly gener-
ated with a uniform distribution at every time step
with up to 500 tasks in total.
We compared the following solution methods.
BASE: Our baseline implementation of the extended
PIBT. When an agent is in an intersection connected
to a DE aisle, the agent can initiate a swap task if nec-
essary regardless of whether it is pushed or not. TA:
When an agent is in an intersection connected to a DE
aisle and the agent is not pushed, the agent can initi-
ate a swap task if necessary (Section 3.2.1). RP: An
optional strategy where each agent avoids the shortest
path preferred by the first agent in its push chain at
5
Theoretically safe bounds are (13, 3, 3, 5, 5, 1, 1) for
(14D-1L, 4D-5L-1G, *-2, 6D-1G, *-2, 4D-5L-3G, 24D-5L-
3G) in Fig. 8, where ‘1’ denotes non-well-formed settings.
Table 4: Makespan and service time.
NpT #Agt. 10 20 53 (N
t
) 54 (N
s
)
(Map) Alg. MS ST MS ST MS ST MS ST
1 BASE 1063 254 990 225 3828 1677 4831 2197
(14D- TA 1078 260 1005 224 4248 1891 5030 2305
1L) RP 1043 244 967 207 3857 1692 4771 2177
TA+RP 1039 241 996 216 4251 1907 5052 2313
10 BASE 1078 470 972 419 3861 1869 4644 2316
TA 1048 460 965 417 4136 2017 4994 2484
RP 1023 447 960 414 3886 1898 4714 2331
TA+RP 1029 449 952 409 4144 2030 4992 2486
#Agt. 10 20 54 (N
t
) 59 (N
s
)
1 BASE 2540 948 2473 935 5816 2819 8578 4311
(4D- TA 2540 948 2484 934 5865 2831 8718 4386
5L- RP 2529 947 2454 918 5741 2780 8625 4324
1G) TA+RP 2529 947 2444 915 5782 2797 8764 4421
10 BASE 2540 1171 2471 1150 5799 2996 8605 4499
TA 2540 1171 2477 1152 5761 2967 8711 4576
RP 2519 1161 2464 1138 5793 2981 8590 4528
TA+RP 2519 1161 2470 1143 5774 2992 8789 4621
#Agt. 10 20 54 (N
t
) 59 (N
s
)
1 BASE 1963 666 1822 590 4010 1750 6054 2790
(4D- TA 1963 666 1821 583 4092 1796 6039 2812
5L- RP 1850 602 1786 581 4016 1764 6005 2791
3G) TA+RP 1850 602 1787 582 4037 1771 5963 2759
10 BASE 1936 875 1833 801 3975 1927 5986 2966
TA 1936 875 1844 804 4048 2001 6012 2962
RP 1847 828 1789 775 3925 1922 5914 2942
TA+RP 1847 828 1775 771 3987 1940 5890 2926
#Agt. 100 200 300 (N
t
) 305 (N
s
)
1 BASE 840 198 1695 693 7904 4515 11287 6610
(24D- TA 842 198 1704 696 7785 4437 11271 6627
5L- RP 795 177 1431 580 7875 4393 11278 6523
3G) TA+RP 811 184 1406 573 7899 4426 11160 6447
10 BASE 731 320 1453 724 7499 4398 11087 6644
TA 743 324 1453 731 7485 4381 10867 6479
RP 692 307 1229 633 7548 4335 10856 6336
TA+RP 694 308 1228 638 7648 4379 10908 6364
each intersection (Matsui, 2024b) (Dap in Tbl. 1)
6
.
As common metrics, we evaluated the makespan
(MS) and service time (ST) that are the number of
time steps to complete all tasks and that to complete
each task. We also evaluated the number of initi-
ated swap tasks and related metrics. The results over
ten executions with random initial locations of agents
were averaged for each problem instance. The ex-
periments were performed on a computer with g++
(GCC) 8.5.0 -O3, Linux 4.18, Intel (R) Core (TM)
i9-9900 CPU @ 3.10 GHz, and 64 GB memory.
4.2 Results
The solution methods correctly completed for all
problem settings. The result revealed that swap tasks
well worked with intersections connected to multi-
ple DE aisles (14D-1L and 4D-5L-1G-2), with DE
aisles containing multiple pickup-and-delivery loca-
tions (4/24D-5L-3G) and with a square (6D-1G(-2)).
Table 4 shows the makespan and service time. Here,
6
We note that the aim of our study is completely dif-
ferent from the previous work that addressed the strategies
to reduce redundant moves of agents by considering some
knowledge of map structures. We just borrowed one of such
strategies to vary the movements of agents for verification.
Improvement of PIBT-based Solution Method for Lifelong MAPD Problems to Extend Applicable Graphs
131
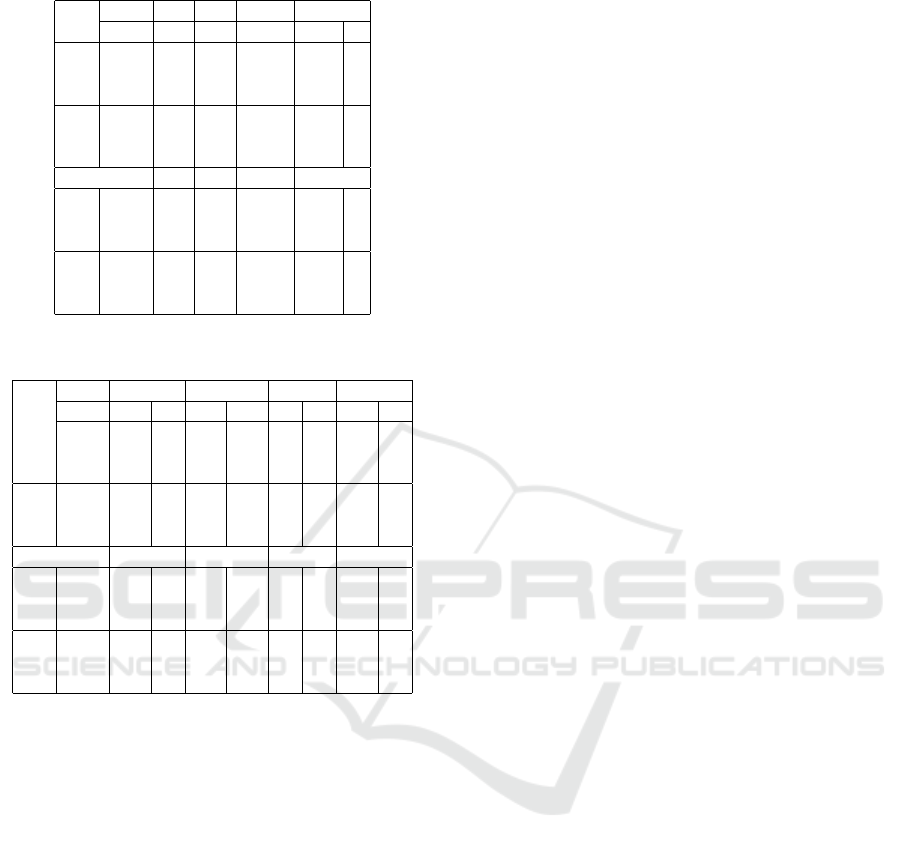
Table 5: Initiated swap tasks
NpT #Agt. 10 20 53 (N
t
) 54 (N
s
)
(Map) Alg. IN IN IN IN OP
1 BASE 117.3 255.5 1191.9 1431.4 3.2
(14D- TA 114.5 211.1 612.5 683.9 1.5
1L) RP 122.5 257.5 1239.6 1422.2 3.5
TA+RP 113.5 208.7 629.5 681.7 1.9
10 BASE 126 262.7 1209.9 1395.6 2.7
TA 107.9 205.2 613.1 668.8 1.9
RP 117.1 254.9 1242.6 1434.8 2.7
TA+RP 110.9 210.4 627.3 683.2 1.8
#Agt. 100 200 300 (N
t
) 305 (N
s
)
1 BASE 408.3 979.7 2669.4 2524.7 9.4
(24D- TA 398.8 916.7 2075.3 1829.6 7.1
5L- RP 395.9 938 2686.6 2479.3 9
3G) TA+RP 401.2 898.3 2167.2 1778.2 6.2
10 BASE 374.6 963.3 2693.5 2518 9.3
TA 370 920.6 2064.6 1807.1 6
RP 374 944.7 2705.7 2453.8 8.6
TA+RP 374.5 880.4 2211.7 1859.4 6.4
IN: initiation, OP: one push (#agt.> N
t
)
Table 6: Ratio of completed/re-initiated swap tasks.
NpT #Agt. 10 20 53 (N
t
) 54 (N
s
)
Alg. CM RI CM RI CM RI CM RI
1 BASE 0.92 0.70 0.79 0.56 0.40 0.47 0.37 0.48
(14D- TA 0.971 0.16 0.940 0.311 0.79 0.18 0.783 0.17
1L) RP 0.92 0.66 0.81 0.57 0.38 0.44 0.37 0.48
TA+RP 0.968 0.49 0.944 0.19 0.77 0.15 0.780 0.18
10 BASE 0.92 0.72 0.81 0.60 0.39 0.47 0.37 0.48
TA 0.970 0.40 0.95 0.28 0.79 0.15 0.79 0.16
RP 0.93 0.61 0.81 0.58 0.38 0.44 0.36 0.48
TA+RP 0.972 0.29 0.92 0.26 0.76 0.16 0.77 0.17
#Agt. 100 200 300 (N
t
) 305 (N
s
)
1 BASE 0.86 0.45 0.79 0.35 0.63 0.31 0.62 0.33
(24D- TA 0.86 0.42 0.816 0.34 0.72 0.27 0.735 0.27
5L- RP 0.86 0.38 0.80 0.36 0.63 0.32 0.63 0.36
3G) TA+RP 0.87 0.37 0.819 0.35 0.71 0.28 0.737 0.30
10 BASE 0.872 0.37 0.79 0.36 0.63 0.30 0.62 0.34
TA 0.873 0.40 0.80 0.33 0.72 0.27 0.74 0.28
RP 0.870 0.40 0.79 0.36 0.63 0.32 0.62 0.35
TA+RP 0.872 0.45 0.81 0.35 0.71 0.30 0.72 0.31
CM: completed, RI: rei-init. for the same tgt. and DE aisle
our major interest is not the performance compari-
son among the solution methods with different minor
strategies but the confirmation of their completion.
For different settings of problems, the methods were
differently affected by the perturbation in their greedy
solution process containing swap tasks. From the re-
sults of 4D-5L-1G and 4D-5L-3G, the larger number
of pickup-and-delivery locations appeared to simply
increase the parallelism of the tasks in these settings.
Although the methods well worked with the theoreti-
cally densest populations of agents, there exits an ap-
propriate number of agents as the common issue.
Table 5 shows the number of initiated swap tasks
and that of one push sequences. In these problem
settings, TA relatively reduced the number of swap
tasks by excluding the agents being pushed from can-
didates of initiator agents. However, in several differ-
ent settings we could not find such a significant dif-
ference. A few numbers of one push sequences were
performed with the number of agents greater than N
t
.
Table 6 shows the ratio of completed swap tasks,
and the ratio of swap tasks, which are canceled and re-
initiated for the same DE aisle, to all canceled tasks.
The ratio of completed swap tasks tends to decrease
with the density of populations. In these problem set-
tings, TA relatively increased the completion ratio and
relatively decreased the overwritten ratio, while those
were not so significant in other settings.
With our experimental implementation, the av-
eraged execution time of the solution process was
within 9 seconds in the case of 24D-5L-3G, NpT=1,
305 agents and averaged makespan of 11278 time
steps. As the first result, we successfully confirmed
the completion of solution methods in several funda-
mental settings and revealed several characteristics re-
garding the swap tasks, while there are opportunities
to improve the solution method.
5 CONCLUSIONS
We improved a solution method based on PIBT for
lifelong MAPD problems by integrating a specific
swap task. We presented detailed techniques for such
an extension, including additional management of pri-
orities, subgoals and states of agents. We also experi-
mentally verified the proposed approach with several
problem settings. While we concentrated on the ex-
tension of a specific swap task that can be naturally
integrated with the original PIBT algorithm as our
first study, we also investigated several important de-
tailed properties of the original solution method that
are necessary to extend this solution method.
In our future study, we will address more gen-
eral cases with further extensions and evaluate with
related solution methods, including investigation for
graphs without cycles and with isthmuses, compari-
son with scalable/incomplete methods based on top-
down approaches, and application of the solution
methods with real-time and bottom-up properties to
practical domains.
ACKNOWLEDGEMENTS
This study was supported in part by The Public
Foundation of Chubu Science and Technology Center
(thirty-third grant for artificial intelligence research)
and JSPS KAKENHI Grant Number 22H03647.
REFERENCES
Barer, M., Sharon, G., Stern, R., and Felner, A. (2014).
Suboptimal Variants of the Conflict-Based Search Al-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
132

gorithm for the Multi-Agent Pathfinding Problem. In
Proceedings of the Annual Symposium on Combinato-
rial Search, pages 19–27.
De Wilde, B., Ter Mors, A. W., and Witteveen, C. (2014).
Push and rotate: A complete multi-agent pathfinding
algorithm. J. Artif. Int. Res., 51(1):443–492.
Li, J., Tinka, A., Kiesel, S., Durham, J. W., Kumar, T. K. S.,
and Koenig, S. (2021). Lifelong Multi-Agent Path
Finding in Large-Scale Warehouses. In Proceedings
of the Thirty-Fifth AAAI Conference on Artificial In-
telligence, pages 11272–11281.
Luna, R. and Bekris, K. E. (2011). Push and swap: Fast
cooperative path-finding with completeness guaran-
tees. In Proceedings of the Twenty-Second Interna-
tional Joint Conference on Artificial Intelligence, vol-
ume 1, pages 294–300.
Ma, H., Harabor, D., Stuckey, P. J., Li, J., and Koenig, S.
(2019). Searching with consistent prioritization for
multi-agent path finding. In Proceedings of the Thirty-
Third AAAI Conference on Artificial Intelligence and
Thirty-First Innovative Applications of Artificial In-
telligence Conference and Ninth AAAI Symposium on
Educational Advances in Artificial Intelligence, pages
7643–7650.
Ma, H., Li, J., Kumar, T. S., and Koenig, S. (2017). Lifelong
Multi-Agent Path Finding for Online Pickup and De-
livery Tasks. In Proceedings of the Sixteenth Confer-
ence on Autonomous Agents and MultiAgent Systems,
pages 837–845.
Matsui, T. (2024a). Integration of Efficient Techniques
Based on Endpoints in Solution Method for Lifelong
Multiagent Pickup and Delivery Problem. Systems,
12(4-112).
Matsui, T. (2024b). Investigation of Heuristics for PIBT
Solving Continuous MAPF Problem in Narrow Ware-
house. In Proceedings of the Sixteenth International
Conference on Agents and Artificial Intelligence, vol-
ume 1, pages 341–350.
Okumura, K. (2023). LaCAM: search-based algorithm
for quick multi-agent pathfinding. In Proceedings of
the Thirty-Seventh AAAI Conference on Artificial In-
telligence and Thirty-Fifth Conference on Innovative
Applications of Artificial Intelligence and Thirteenth
Symposium on Educational Advances in Artificial In-
telligence, pages 11655–11662.
Okumura, K., Machida, M., D
´
efago, X., and Tamura, Y.
(2022). Priority Inheritance with Backtracking for It-
erative Multi-Agent Path Finding. Artificial Intelli-
gence, 310.
Okumura, K., Tamura, Y., and D
´
efago, X. (2019). winPIBT:
Expanded Prioritized Algorithm for Iterative Multi-
agent Path Finding. CoRR, abs/1905.10149.
Sharon, G., Stern, R., Felner, A., and Sturtevant, N. R.
(2015). Conflict-Based Search for Optimal Multi-
Agent Pathfinding. Artificial Intelligence, 219:40–66.
Silver, D. (2005). Cooperative Pathfinding. In Proceedings
of the AAAI Conference on Artificial Intelligence and
Interactive Digital Entertainment, pages 117–122.
ˇ
C
´
ap, M., Vok
ˇ
r
´
ınek, J., and Kleiner, A. (2015). Complete
Decentralized Method for On-Line Multi-Robot Tra-
jectory Planning in Well-Formed Infrastructures. In
Proceedings of the Twenty-Fifth International Confer-
ence on Automated Planning and Scheduling, pages
324–332.
Yamauchi, T., Miyashita, Y., and Sugawara, T. (2022).
Standby-based deadlock avoidance method for multi-
agent pickup and delivery tasks. In Proceedings
of the Twenty-First International Conference on Au-
tonomous Agents and Multiagent Systems, pages
1427–1435.
APPENDIX
Pseudo Code of Extended PIBT
Algorithm
The pseudo codes of our extended version of the PIBT
algorithm are shown in Fig. 9. Since the original ver-
sion of the pseudo codes are described in a compact
form, we first expanded an if-block (lines 16-23 in
Fig. 2) with two internal blocks (lines 24-42 in Fig. 9).
Additional parameters a
f
, a
s
, and p
d
, and return value
a
t
in function PIBT propagate additional information
in its recursion process (lines 6, 13, 28, 34, 40, 44,
and 56).
a
f
represents the first pusher in a push chain and
that is implicitly referred in several extended rules for
f
i
(v) (lines 6, 13, 14, 19-20, 22, and 28).
To initiate each swap task, we utilized the recur-
sion process of PIBT in a slightly technical manner.
In a top-down path of the recursion, the information
of a candidate a
s
for an initiator agent and an associat-
ing priority value p
d
is propagated (lines 6, 13, 15, 16,
and 26-29). When agent a
i
having a candidate initia-
tor a
s
cannot move, a
i
enables a swap task initiated by
a
s
, by setting target a
t
= a
i
(lines 47-50). Then a
s
par-
tially initiates its swap task for a
i
(line 51). Namely,
the initiation process by a
s
is performed in a return
path of recursion. Similarly, the relating swept agents
are also initiated in the same return path (lines 52,
and 53). Here, we decomposed the communication
among the member agents of each swap task, includ-
ing the cancellation of existing tasks by considering
correct timings. Finally, the initiation is completed in
the level of a
s
(line 29).
The completion/cancellation of swap tasks is
checked in several appropriate timings (lines 17, 31,
37, 43, and the implicit cancel communication among
agents). Subgoals and sub-modes of agents are up-
dated in the timing of their moves if necessary (lines
10, and 11). In addition, the special rules for the one-
push sequences are also embedded (lines 7-8, 32-33,
and 38-39), including mutex of the sequence.
Improvement of PIBT-based Solution Method for Lifelong MAPD Problems to Extend Applicable Graphs
133

1 UNDECIDED← A (t) // agents list
2 OCCUPIED←
/
0 // vertices list
3 update priorities p
i
(t) for all agents a
i
4 while UNDECIDED̸=
/
0 do
5 a ← the agent with the highest priority in UNDECIDED
6 PIBT(a,⊥,⊥,⊥,⊥) // ⊥ denotes empty
7 if inOPretreat(target(a)) then make the rest of agents
8 in UNDECIDED stay. end if // mutex to protect role xchg.
9 end while
10 Manage sub-modes that can be done in an update phase of
11 agents’ locations and subgoals.
13 function PIBT(a
i
,a
j
,a
f
,a
s
,p
d
)
14 if a
f
= ⊥ then a
′
f
← a
i
else a
′
f
← a
f
end if, a
t
← ⊥
15 if a
s
̸= ⊥ then p
′
d
← max(p
d
, p
i
(t), p
controller(a
i
)
(t))
16 else p
′
d
← p
d
end if
17 Apply Ch.
18 UNDECIDED←UNDECIDED\{a
i
}
19 C
i
← ({v|((v
i
(t),v) ∈ E} ∪ {v
i
(t)) ∧ f
i
(v) ̸= ⊥})
20 \({v
j
(t)}∪OCCUPIED) // with new constraints for f
i
(v)
21 while C
i
̸=
/
0 do
22 v
∗
i
← arg max
v∈C
i
f
i
(v) // with new preferences for f
i
(v)
23 OCCUPIED←OCCUPIED∪{v
∗
i
}
24 if a
k
s.t. v
∗
i
= v
k
(t) exists then
25 if a
k
∈UNDECIDED then
26 if a
i
can be an initiator then a
′
s
← a
i
, p
′
d
← p
i
(t)
27 else a
′
s
← a
s
end if
28 (r, a
t
) ←PIBT(a
k
,a
i
,a
′
f
,a
′
s
,p
′
d
)
29 if a
′
s
= a
i
then a
t
← ⊥ end if // complete initiation
30 if r is valid then
31 v
i
(t +1) ← v
∗
i
, apply Ce and Cp.
32 if inOnePush(a
i
) then ask target(a
i
) to
33 one-push retreat. end if
34 return (valid,⊥) // move with push
35 else C
i
← C
i
\OCCUPIED end if
36 else
37 v
i
(t +1) ← v
∗
i
, apply Ce and Cp if v
i
(t +1) ̸= v
i
(t).
38 if v
i
(t +1) = v
i
(t)∧inTopMostSwapTask(a
i
)∧
39 target(a
i
)=a
i
then ask initiator(a
i
) to one push. end if
40 return (valid,⊥) // move/stay without push
41 end if
42 else
43 v
i
(t +1) ← v
∗
i
, apply Ce and Cp.
44 return (valid,⊥) // move without push
45 end if
46 end while
47 if a
s
̸= ⊥ ∧ a
t
= ⊥ ∧ p
s
(t) = p
′
d
∧ v
i
(t) = sg(a
s
)∧
48 ¬(hasMAPDtask(a
i
) ∧ v
i
(t) = sg(a
i
)∧
49 (v
i
(t) = s
i
∨ v
i
(t) = g
i
)) // complete MAPD subgoal first
50 then a
t
← a
i
,
51 a
s
partially initialize swap task for a
s
and target a
i
.
52 else if a
t
̸= ⊥ then
53 a
s
partially initialize swap task for a
s
and swept agent a
i
.
54 end if
55 v
i
(t +1) ← v
i
(t)
56 return (invalid,a
t
) // stay by failing to move
57 end function
a
f
: first pusher for new f
i
(v), a
s
: initiator candidate
a
t
: target to initiate swap task in return path of recursion
p
d
: dominant priority, sg(a
i
): first subgoal of a
i
v
i
(t): location of agent a
i
at time step t
Task initiation 6, 13-16, 28-29, 34, 40, 44, 47-54, 56
Task termination 17, 31, 37, 43, and implicit cancel
f
i
(v) 6, 13-14, 19-20, 22, 28
subgoal, sub-mode 10-11
one push 7-8, 32-33, 38-39
Figure 9: Extension to PIBT (time step t).
Monotonically Increasing Priority Values
To maintain the consistency of priority values among
agents, we only allow each agent a
i
to initiate a swap
task only if agent a
i
has a priority value higher than
target and all swept agents. As the result of the initi-
ation of a swap task, the target agent to retreat must
have a priority higher than its initiator agent. After the
target agent retreats, it asks its initiator to be its con-
troller again. The operation must also not affect other
agents. Therefore, the target agent should be inserted
between the initiator agent and an agent who has the
minimum priority higher than the initiator agent. In
addition, we permit agents to multiply ask to retreat
in arbitrary time steps if necessary. When an agent
initiates a new swap task, its old swap task is over-
written if one exists.
We can employ the following hierarchical priority
value p
i
of agent a
i
. Here time step t is omitted.
p
i
= pe
i
+ cp · pa
i
+ ca · pn
i
/pd
i
, (1)
where pe
i
≫ cp · pa
i
≫ ca· pn
i
/pd
i
. pe
i
is the elapsed
time from the update of the first subgoal of the agent.
pa
i
is the additional value to break ties of agents. pn
i
and pd
i
are integer values. pn
i
/pd
i
is employed to
adjust priority values among two agents. These val-
ues are initialized as pe
i
= 0, pn
i
= 0 and pd
i
= 1.
pa
i
is initially based on agent a
i
s’ identifier. pe
i
is
reset to zero after agent a
i
arrived its first subgoal lo-
cation. Otherwise, pe
i
is incremented in each time
step. When agent a
i
raises agent a
j
’s priority than a
i
,
the following update is performed after p
′
j
← p
′
i
← p
i
.
pn
′
i
← 3pn
i
+ 1 (2)
pd
′
i
← 3pd
i
(3)
pn
′
j
← 3pn
i
+ 2 (4)
pd
′
j
← 3pd
i
(5)
It also increases agent a
i
’s priority to avoid to generate
the same priority for different agents.
In actual implementation, pn
i
and pd
i
frequently
exceed the precision of variables. To avoid such situ-
ations, we iteratively reorder the agents by pa
i
+ ca ·
pd
i
/pn
i
and update pa
i
by the ordering. Then pn
i
and
pd
i
are reset as pn
i
= 0 and pd
i
= 1. The required
frequency of this update depends on the precision of
the variables and the number of initiated swap tasks.
The reset of the priority values must be synchronized
among an entire system in a decentralized implemen-
tation.
Actually, we developed the proposed algorithm
under this type of priority values and finally replaced
it by the priority inversion. Employing monotonically
increasing values is a standard approach to control
systems with multiple components. The frequency of
the reset under uint64
t variables was sufficiently ac-
ceptable in our preliminary experiment.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
134
