
Environment Descriptions for Usability and Generalisation in
Reinforcement Learning
Dennis J. N. J. Soemers
1 a
, Spyridon Samothrakis
2 b
, Kurt Driessens
1 c
and Mark H. M. Winands
1 d
1
Department of Advanced Computing Sciences, Maastricht University, Maastricht, The Netherlands
2
Institute for Analytics and Data Science, University of Essex, Colchester, U.K.
Keywords:
Environment Descriptions, Generalisation, Reinforcement Learning.
Abstract:
The majority of current reinforcement learning (RL) research involves training and deploying agents in envi-
ronments that are implemented by engineers in general-purpose programming languages and more advanced
frameworks such as CUDA or JAX. This makes the application of RL to novel problems of interest inacces-
sible to small organisations or private individuals with insufficient engineering expertise. This position paper
argues that, to enable more widespread adoption of RL, it is important for the research community to shift
focus towards methodologies where environments are described in user-friendly domain-specific or natural
languages. Aside from improving the usability of RL, such language-based environment descriptions may
also provide valuable context and boost the ability of trained agents to generalise to unseen environments
within the set of all environments that can be described in any language of choice.
1 INTRODUCTION
Reinforcement learning (RL) (Sutton and Barto, 2018)
researchers have largely converged on common APIs for
the development of benchmark domains used to evaluate
RL algorithms for sequential decision-making problems.
New environments (problems) are customarily written
in general-purpose programming languages such as C++
or Python, implementing a Gym-like (Brockman et al.,
2016) API for algorithms to interface with environments.
We may distinguish two broad categories of RL re-
search. On the one hand, there is research focusing
on the development of (modifications of) training algo-
rithms, typically not focused on any specific task. There
may be a focus on certain categories of tasks (single-
agent RL, multi-agent RL, RL for partially observable
environments, and so on), but existing and established
frameworks with a suite of applicable domains are typ-
ically used for empirical evaluations. Researchers typ-
ically aim to demonstrate a high level of generality, by
showing that an algorithm can effectively learn on a large
collection of different environments within such a suite,
as opposed to only a single environment. These environ-
a
https://orcid.org/0000-0003-3241-8957
b
https://orcid.org/0000-0003-1902-9690
c
https://orcid.org/0000-0001-7871-2495
d
https://orcid.org/0000-0002-0125-0824
ments are often games or other simulations (Machado
et al., 2018; Tassa et al., 2018; Cobbe et al., 2020; El-
lis et al., 2023), with arguably limited direct real-world
impact outside of their use as benchmarks for RL re-
search. On the other hand, there is research in which a
concrete, high-impact “real-world” task is selected, and
RL is used to improve performance on that one task.
Substantial engineering effort is often dedicated to-
wards implementing and optimising a simulator for
such a task. This engineering effort often requires
specialised knowledge of, for example, programming
for GPUs or other hardware accelerators, and of the
inner workings of deep learning and RL algorithms.
While discussions on experimental methodologies
in RL have been on the rise (Henderson et al., 2018;
Agarwal et al., 2021; Jordan, 2022; Patterson et al.,
2023; Jordan et al., 2024; Voelcker et al., 2024), we
see little discussion on how (or by whom) tasks (or
environments) are described or implemented in the
first place. In this position paper, we argue that the
standard assumption that environments can be imple-
mented (and heavily optimised) in general-purpose
programming languages, by engineers familiar with
machine learning, (i) poses a challenge to widespread
adoption of RL for real-world use cases, and (ii) also
leads the research community to miss out on inter-
esting research directions with respect to generalisa-
Soemers, D. J. N. J., Samothrakis, S., Driessens, K. and Winands, M. H. M.
Environment Descriptions for Usability and Generalisation in Reinforcement Learning.
DOI: 10.5220/0013247300003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 3, pages 983-992
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
983
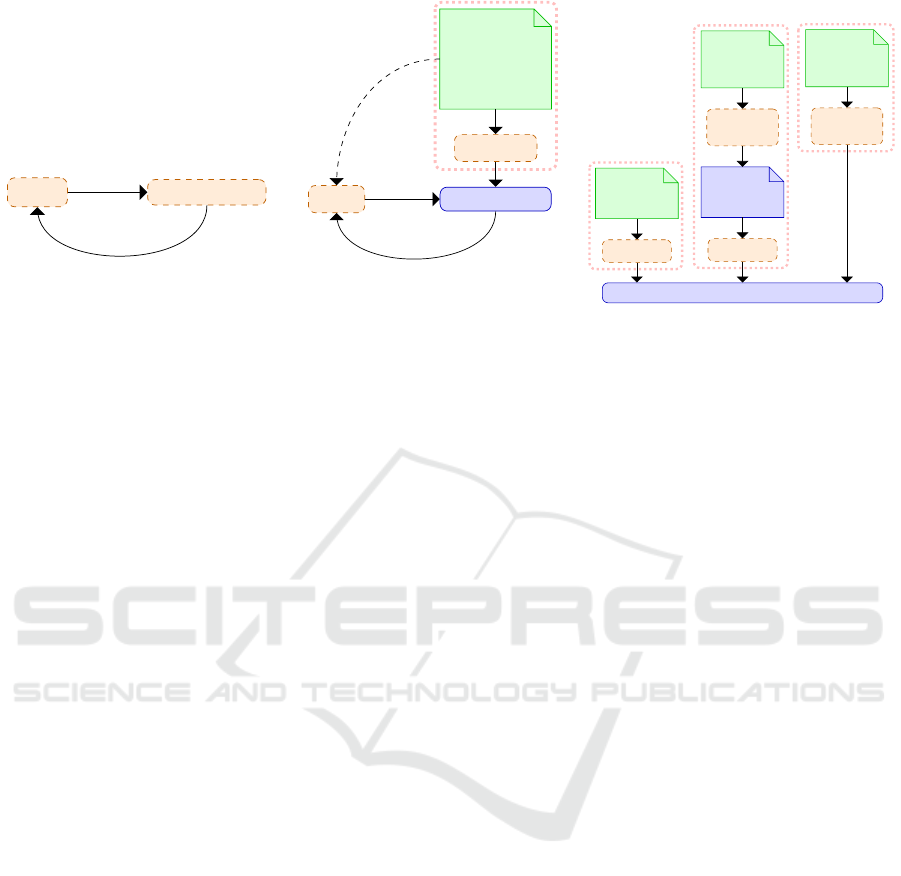
Agent
Simulator
State Observations,
Rewards
Actions
(a) .
Agent
Simulator
Compiler
User-friendly
Environment
Description
State Observations,
Rewards
Actions
Context
(b) .
Simulator
Compiler
DSL
Description
Compiler
DSL
Description
Language
Model
Natural
Language
Description
Language
Model
Natural
Language
Description
(c) .
Figure 1: Orange boxes with dashed lines represent components that require substantial engineering or RL expertise. The
green components can be provided by users with little to no engineering and RL expertise. (a) A depiction of the customary
setting in most current RL research. (b) The approach for which this paper posits that increased research attention is warranted
(Section 2), which also leads to interesting avenues for improving (zero-shot) generalisation in RL (Section 3). (c) User-
friendly environment descriptions may be written in a DSL, or in a natural language, where the latter approach may or may
not also generate an intermediate DSL description.
tion and transfer in RL. While it may be acceptable
to invest substantial engineering resources for the im-
plementation of environments for large-scale projects
with high potential impact, it impedes the application
of RL by smaller organisations or private individu-
als. We posit that more widespread applications of
RL will be greatly aided if the latter groups can ex-
press their tasks in user-friendly domain-specific lan-
guages (DSLs) (Mernik et al., 2005; Aram and Neu-
mann, 2015), or even in natural language. There are
many possible definitions and interpretations of the
term “user-friendly” (Stevens, 1983), but as a work-
ing definition, we will say that a language is user-
friendly if it is easy to use for users who may be ex-
perts in their application domain of interest, but may
not have any RL, AI, or programming expertise, and
is designed with their needs in mind.
Once we adopt a methodology where environ-
ments are represented in explicit forms that can be
provided as inputs to an agent (e.g., DSL or natural
language snippets), we can also explore new forms
of generalisation or transfer in RL, where effective
generalisation or zero-shot transfer to unseen environ-
ments may become feasible given sufficient under-
standing of the task descriptions. Figure 1a depicts
the setting where the environment is implemented di-
rectly in a general-purpose programming language,
and Figure 1b depicts the proposed settings, with Fig-
ure 1c providing three examples of how the transla-
tion from a user-friendly environment description to
a simulator may work. For tasks that take place in
the physical world, such as non-simulated robotics
tasks, a description of the reward function can suf-
fice, as hardware and the real world already define
aspects such as the action space and transition dy-
namics. However, even in these cases, the ability to
automatically generate a sufficiently accurate simula-
tor from user-friendly descriptions would, in combi-
nation with sim-to-real transfer (Zhao et al., 2020),
still be highly beneficial (Yang et al., 2024).
2 DESCRIPTION LANGUAGES
FOR ENVIRONMENTS
Subsection 2.1 describes the established practice
where RL research uses environments implemented,
conforming to a standardised API, in general-purpose
programming languages. As an initial step to-
wards more user-friendly descriptions, Subsection 2.2
discusses the use of DSLs for describing environ-
ments used in RL research. Subsection 2.3 ex-
plores the possibility of using natural languages to
define environments—arguably one of the most user-
friendly modalities. Finally, Subsection 2.4 presents
the central position of this paper: a call for more (re-
search attention for) benchmarks in which environ-
ments are described in DSLs or natural language.
2.1 Defining Environments in
Programming Languages
Outside of robotics work applied directly in the phys-
ical world, it is customary to implement the envi-
ronments used for RL research in programming lan-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
984

guages such as C++ or Python. In a recent trend, more
specialised toolkits, such as CUDA or JAX (Brad-
bury et al., 2018) are used to enable the environments
themselves—and not just DNN forward and back-
ward passes—to make efficient use of hardware ac-
celerators (Dalton and Frosio, 2020; Freeman et al.,
2021; Lange, 2022; Koyamada et al., 2023). This can
provide dramatic speed increases, but also imposes
additional constraints on programming style and re-
quires more specialised engineering skills.
Most developers of RL environments have con-
verged to the API popularised by OpenAI Gym
(Brockman et al., 2016). This API requires develop-
ers to implement:
• A definition of the observation space. For any
state that an agent may ever reach in an envi-
ronment, it will receive an observation from this
space as input.
• A definition of the action space A. It is typi-
cally assumed that agents must select any one el-
ement from this space as their action in each non-
terminal state.
• A function to reset the environment to an initial
state.
• A step function, which takes an action from A as
input, transitions from a current state s ∈ S to a
successor state s
′
∈ S, and returns a real-valued
reward r and an observation of s
′
.
2.2 DSLs for Environments
A potential alternative to the standard practice of pro-
gramming environments, is to use DSLs to describe
sets of environments. This approach still requires sig-
nificant engineering effort to develop a compiler that
can translate descriptions from the DSL to a runnable
simulator with an API for (learning) agents. How-
ever, once this compiler has been built, users with lit-
tle to no programming experience may—depending
on the complexity and user-friendliness of the DSL in
question—use it to describe new environments that fit
within the overarching domain supported by the DSL.
Numerous examples of DSLs for describing se-
quential decision-making problems already exist,
though their adoption as benchmarks in the RL com-
munity is limited compared to benchmarks such as
the Arcade Learning Environment (Bellemare et al.,
2013; Machado et al., 2018) or the DeepMind Con-
trol Suite (Tassa et al., 2018), which are not based on
DSLs. Examples include PDDL (McDermott et al.,
1998) for planning problems, and the Stanford Game
Description Language (Love et al., 2008; Genesereth
and Thielscher, 2014), Ludii (Piette et al., 2020), and
MiniHack (Samvelyan et al., 2021) for various ranges
of games. PDDLGym (Silver and Chitnis, 2020)
provides Gym environment wrappers around PDDL
problems.
2.3 Describing Environments in Natural
Language
While DSLs may already be considered a more user-
friendly alternative to general-purpose programming
languages (Mernik et al., 2005; Aram and Neumann,
2015) for describing environments, natural language
would be even more accessible to a wider userbase.
Although the state of the art of large language models
(LLMs) is highly impressive (Zhao et al., 2023), there
are still concerns surrounding reliability and correct-
ness (Marcus et al., 2023). Ambiguities typically
present in natural languages, as well as the tendency
for humans to underspecify task descriptions (e.g.,
rules of games), present challenges that require fur-
ther research. Recently, Afshar and Li (2024) demon-
strated promising initial results for an LLM gener-
ating executable environment code from natural lan-
guage descriptions, but it still requires an expert hu-
man who is able to interpret the generated code and
provide feedback on potential mistakes. In the short
term, it may be more realistically feasible to use a
combination of natural language and DSLs, where an
LLM first translates a natural language description to
a DSL-based description (Desai et al., 2016; Oswald
et al., 2024; Zuo et al., 2024), and a user can inspect
the generated description and make corrections if nec-
essary. In the long term, if LLMs can be made suf-
ficiently reliable, natural languages would likely be
the most accessible modality for describing environ-
ments.
2.4 Research Focus on Description
Languages for Environments
Before formally stating the central position of this pa-
per, we make two assumptions relating to the user-
friendliness of DSLs and natural languages (Assump-
tion 1), and the desirability of this user-friendliness
(Assumption 2).
Assumption 1. Defining environments in DSLs or
natural languages can be more user-friendly than
general-purpose programming languages.
Increasing user-friendliness and lowering barriers
to entry is a well-established motivation for the use
of DSLs (Mernik et al., 2005; Aram and Neumann,
2015). Note that there may also be other reasons
for using DSLs, and there can be DSLs that do not
Environment Descriptions for Usability and Generalisation in Reinforcement Learning
985
substantially lower barriers to entry: this depends on
the design of the DSL in question. For example,
the logic-based Stanford Game Description Language
(Love et al., 2008; Genesereth and Thielscher, 2014)
arguably still requires substantial technical expertise,
and writing games in it may be considered error-prone
due to the large file size required for many games.
In contrast, allowing for clear and succinct descrip-
tions that are easy to read and write was an explicit
design goal for Ludii’s description language (Piette
et al., 2020). Likely in no small part due to the lan-
guage’s level of accessibility, Ludii has amassed a
library of over 1200 distinct official game descrip-
tions,
1
including third-party contributions from game
designers with little or no programming experience.
2
In the case of natural languages, if any concerns
around ambiguities and underspecification of envi-
ronments can be adequately addressed, we see little
reason to doubt that many users would indeed find
them more accessible than programming languages.
If procedures translating natural language descrip-
tions directly into executable simulations cannot be
made sufficiently reliable, a potential solution may be
to use DSLs as an intermediate step. Users could first
describe their tasks in natural languages, and ideally
only have to verify or fix small issues in automatically
generated DSL descriptions afterwards.
Assumption 2. Enabling environments to be defined
in more user-friendly ways is desirable.
First, we will acknowledge that lowering the bar-
rier to entry for defining environments is not necessar-
ily always of importance. For example, when RL is
applied to an individual, specific domain with a high
degree of scientific, societal, economic or other form
of impact, it will often be worth investing substan-
tial engineering effort into the environment definition.
However, running such projects tends to be restricted
to groups with direct access to RL experts.
A survey among AI engineers, AI designers, and
RL engineers from AAA video game studios, inde-
pendent developers, and industrial research labs—
most of which do have direct access to a substantial
amount of engineering expertise—revealed, among
other concerns, an overreliance on engineering sup-
port, and difficulties in designing tasks for RL agents,
as challenges for the adoption of RL and other AI
techniques in video game development (Jacob et al.,
2020). While not focused on RL (but, rather, AI in
general) or environment descriptions, a recent study
by Simkute et al. (2024) reveals a substantial discon-
nect between the technical know-how that AI design-
1
https://ludii.games/library.php
2
https://ludii.games/forum/forumdisplay.php?fid=23
ers expect users will have, and what they actually tend
to have, as a core barrier to adoption of AI in practice.
These studies point to the relevance of improving the
user-friendliness of any aspect of the RL (or any AI)
pipeline.
If we wish to democratise the use of AI (Seger
et al., 2023) to the extent that users with little ex-
pertise in RL—or even programming—can apply it
to their problems of interest, enabling environments
to be defined in more user-friendly ways would be a
requirement. Outside of RL, in the landscape of gen-
erative artificial intelligence (AI), substantial value is
generated not necessarily just by the models them-
selves, but also by the release of user-friendly tools
and interfaces to access the trained models. Fa-
mous examples include OpenAI’s ChatGPT (OpenAI,
2022), and Gradio apps (Abid et al., 2019). We envi-
sion that a comparable workflow for RL would have a
convenient interface for a user to describe their prob-
lem, after which a policy—ideally without requiring
any further training (see Section 3)—would be able to
start taking actions and solve the problem. In addition
to easing the deployment of RL by non-engineers for
their tasks of interest, domain experts of novel prob-
lems would also become able to create interesting new
benchmark domains for RL researchers. This leads to
our position as follows:
Position
The RL research community should place
greater focus on benchmarks with environ-
ments defined in user-friendly DSLs or nat-
ural languages.
Two clear lines of research that follow from As-
sumptions 1 and 2 are the design of user-friendly
DSLs for relevant application domains, and gener-
ating reliable translations from natural language to
exectuable simulators. However, beyond these chal-
lenges related to getting simulators to run in the first
place, we also argue that they should be used ex-
tensively as benchmarks in general RL research, and
that existing benchmarks—with environments im-
plemented directly in general-purpose programming
languages—are not sufficient to evaluate how differ-
ent algorithms and approaches might perform when
later applied to environments defined in more user-
friendly languages.
For example, consider the common assumption
that the full action space A can be defined in advance,
as described in Subsection 2.1. While standardised
APIs such as Gym’s (Brockman et al., 2016) have un-
doubtedly accelerated RL research, there is a risk that
convergence of the community on such an API may
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
986

have inadvertently entrenched this assumption in the
community. The ubiquity of this assumption may also
be due to its convenience in deep learning research.
There is some early deep RL (DRL) work (Riedmiller,
2005; Lange and Riedmiller, 2010) where actions
were treated as inputs of neural networks—hence re-
quiring separate forward passes for every legal ac-
tion to compute policies or state-action values. How-
ever, it quickly became common practice—especially
after the work on Deep Q-Networks by Mnih et al.
(2013)—to have outputs for all actions. Requiring
only a single DNN forward pass per state greatly im-
proves computational efficiency, at the cost of requir-
ing prior knowledge of the full action space.
In practice, the full action space (or a reasonably
sized superset thereof) cannot always be automati-
cally inferred from environment descriptions written
in languages that prioritise aspects such as usability
over support for robust automated inference. In rela-
tively verbose, logic-based DSLs this may be possi-
ble, and it can be straightforward to build policy net-
works accordingly (Goldwaser and Thielscher, 2020).
In contrast, in the DSL of Ludii, which is substantially
more succinct and arguably user-friendly (Piette et al.,
2020), this does not appear to be feasible. The root of
the issue is that succinct descriptions of, for exam-
ple, game rules, are generally descriptions of proce-
dures that may be used in any game state to generate
the set of legal actions for that particular game state.
Determining the full action space of the environment
requires combinations of this information with an in-
ference of what the entire state space may look like,
and this is challenging if the semantics of the DSL
are not readily available in a logic-based format. For
example, the rule that legal moves consist of play-
ers placing one of their pieces on any empty cell in
the game of Hex is formulated as (play (move Add
(to (sites Empty)))) in Ludii’s DSL. In combi-
nation with knowledge of the size of the board (which
is defined in a different rule), knowledge that there are
no rules that can ever change the size of the board,
and knowledge that there are no other rules for other
types of moves, it is easy for humans to infer that
the action space of this game must be equal to the
number of cells on the board. However, without ex-
plicit, direct access to formal semantics of the many
hundreds of keywords in Ludii’s DSL (Browne et al.,
2020), there is no clear way to make this inference
in an automated and general manner that works for
any game described in the language. Practical at-
tempts at using deep learning with Ludii have there-
fore faced challenges such as action aliasing, where
a single output node of a policy network may end up
getting shared by multiple distinct legal actions (Soe-
mers et al., 2022)—an issue that is rarely considered
possible in other DRL research. Maras et al. (2024)
opted to forgo training a policy head altogether, stick-
ing only to a state value function, for games written in
another DSL. A similar problem surfaces in PDDL-
Gym (Silver and Chitnis, 2020), which also requires
careful treatment of action spaces due to a mismatch
between PDDL and the customary assumptions about
action spaces in RL.
These examples of multiple existing DSLs that
conflict with the otherwise common assumption of
prior knowledge of the full action space may be
merely one example of an important issue that is
largely overlooked by current research. It cannot be
ruled out that other types of issues, which are not ad-
equately accounted for by the currently prevailing re-
search methodologies, may surface as the community
shifts focus to more benchmarks based on environ-
ments defined in DSLs or natural language.
3 DESCRIPTIONS AS CONTEXT
FOR GENERALISATION
The previous section argues for the importance of de-
veloping and benchmarking RL techniques that can
operate on environments defined in DSLs or natu-
ral language, as opposed to general-purpose program-
ming languages, and potential issues that may surface
and are underexplored in the current research land-
scape. However, in addition to potential issues, we
also see opportunities. In particular, succinct—but
complete—environment descriptions may serve as a
powerful tool to improve (zero-shot) generalisation
(Kirk et al., 2023) across the set of all environments
that may be described in the language of choice.
3.1 Generalisation in RL
The most straightforward setting in RL is to have
an agent training in a single environment for some
time, and to subsequently evaluate its performance
in the same environment. This approach has a high
risk of producing agents that overfit, in the sense that
they may become overly reliant on spurious features,
largely ignore state observations altogether and sim-
ply memorise trajectories of states or actions, or oth-
erwise be incapable of handling even minor variations
on the environment after training (Whiteson et al.,
2011; Machado et al., 2018; Zhang et al., 2018, 2020).
A popular category of RL research with a higher
degree of generalisation involves training agents on a
subset of one or more closely-related environments,
Environment Descriptions for Usability and Generalisation in Reinforcement Learning
987

and evaluating them in the same set, or a differ-
ent set of similar environments (Farebrother et al.,
2018; Justesen et al., 2018; Nichol et al., 2018; Cobbe
et al., 2019, 2020; Stone et al., 2021). Different envi-
ronments in this case may be different levels of the
same video game, or subtle variants of an environ-
ment with, for example, modified background or fore-
ground colours or patterns, different values for the
velocities of certain entities or other numeric param-
eters, or different reward functions. While prior re-
search collectively covers variation along all dimen-
sions of environments (variation in transition dynam-
ics, in colours used in state observations, in goals or
reward functions, etc.), the work described in each
publication individually tends to be restricted to a
smaller subset of these dimensions. Soemers et al.
(2023) used DSL-based environment descriptions for
(zero-shot) transfer learning between different board
games, but only to a relatively small degree, where
the transfer mechanism was not automatically learnt.
Banerjee and Stone (2007); Kuhlmann and Stone
(2007) automatically identified mappings or transfer-
able features between games, but they used a low-
level logic-based DSL, which is arguably lacking in
user-friendliness.
3.2 Generalisation Through Context
Theoretical work suggests that, in the worst case,
strong assumptions on the similarity between differ-
ent environments are required for efficient generali-
sation to be possible (Malik et al., 2021). One rea-
son for the difficulty of generalisation to unseen envi-
ronments, without strong restrictions on the degree of
variation, is that epistemic uncertainty about relevant
parameters of the current environment essentially
turns the collection of all environments that the agent
may face into a partially observable environment—
even if the current state of each individual environ-
ment is fully observable (Ghosh et al., 2021).
The notion of such a collection of environments,
each of which may be identified by certain parame-
ters (a context), of which some may never be used
for training and only appear at test time, may be for-
malised as a contextual (Kirk et al., 2023) Markov
decision process. Contexts may be as simple as just
the value of a random seed that is used for proce-
dural level generation, or take a more complex form
such as a vector of parameters that describe important
properties of the environment. Contexts may or may
not be observable to the agent(s), although the ability
to observe contexts—which should also carry suffi-
cient information to enable disambiguation between
environments—is required to resolve partial observ-
ability (Ghosh et al., 2021) induced by epistemic un-
certainty.
Research on multi-task RL often involves provid-
ing contexts as inputs to agents, but these contexts
tend to be far from full environment descriptions. For
example, Deisenroth et al. (2014) provide goal coor-
dinates for robotic control tasks as context. It is com-
mon to provide short, language-based instructions or
hints to guide the agent (Luketina et al., 2019; Lif-
schitz et al., 2023; Kharyal et al., 2024), but such
instructions do not (fully) describe the environment.
Lee et al. (2023); Raparthy et al. (2023); Reed et al.
(2023) prompt agents with demonstrations of inter-
actions by experts for disambiguation between envi-
ronments and in-context learning, which is a form of
context that is arguably more difficult to acquire than
environment descriptions (requiring an environment-
specific expert to have already been trained), whilst
simultaneously carrying less information (it does not
reveal information about any parts of the environment
that are not explored in the demonstration). Sun et al.
(2020) use a DSL to prescribe policies that an agent
should execute, as opposed to describing the envi-
ronment itself. The textual descriptions provided to
agents by Zhong et al. (2020) are perhaps closest to
what we propose, although their descriptions are not
sufficiently detailed to the extent that they could be
compiled into a correct simulator, and are not meant
to serve as a substitute for implementing the environ-
ment in a programming language.
3.3 Environment Descriptions as
Context
If it is often desirable to describe environments in suc-
cinct DSLs or in natural language, as posited in Sec-
tion 2, then these descriptions may also be used to im-
prove generalisation by serving as contexts. Leverag-
ing such descriptions as context should not be viewed
as a reduction in generality, or being restricted to a
particular DSL, as the general workflow of providing
environments in such a language is arguably more ac-
cessible and more general than using a programming
language for many potential end users. An impor-
tant property of such environment descriptions is that
they come from a shared language, and it ought to be
possible for humans as well as programs to generate
novel environment descriptions in the same language.
We cannot only generate contexts from environments,
but also generate environments (in the form of fully
executable simulators) from contexts. From the re-
searchers’ point of view, this is valuable as it makes
environments easily controllable and enables a wide
variety of evaluation protocols (Kirk et al., 2023).
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
988

From the learning agent’s point of view, this property
may also be valuable in that a program could actively
learn about the description language that is used by
procedurally generating new descriptions (Browne,
2009; Todd et al., 2024), translating them into exe-
cutable simulators, and learning in them—effectively
forming their own curriculum of environments (Den-
nis et al., 2020; Rigter et al., 2024).
Furthermore, it could be argued that contexts
that completely describe an environment—to the ex-
tent that they could be translated into executable
simulators—are likely to be a prerequisite for un-
restricted, zero-shot generalisation in RL (Irpan and
Song, 2019). Consider the generalisation abilities of
humans. In some cases, humans can effectively gen-
eralise to unseen situations without relying on explicit
task descriptions, but in others they cannot. For ex-
ample, if a human plays a new video game for the
first time, in which there is something that looks like
fire, they can infer that they should likely avoid the
fire—based on their related experience in the physical
world and other video games. However, if a human
is faced with a brand new board game, they cannot
be expected to play it well if they are not explained
the rules of the game. Once the rules are explained,
they may be able to play well immediately—based on
their experience with related board games and abil-
ity to reason—without any direct experience with the
game in question.
4 RELATED WORK
Mannor and Tamar (2023) caution against excessive
focus of the research community on algorithms in ex-
isting benchmarks, with little attention for deploying
to novel problems, but they do not discuss ease of use,
or user-friendly environment description languages as
a potential solution. Rodriguez-Sanchez et al. (2023)
introduce RLang as a DSL that can be used to pro-
vide background knowledge on any aspect of an en-
vironment. However, they propose for such descrip-
tions to be provided in addition to environment im-
plementations in general-purpose programming lan-
guage, rather than as a replacement. Nevertheless,
this could be an example of a DSL that could be used
for our proposed research agenda. Jothimurugan et al.
(2019) describe a DSL used to specify reward func-
tions via, e.g., goals and constraints, but no other as-
pects of the environment. Focusing specifically on the
problem of representing goals (rather than full envi-
ronments), and not necessarily from the perspective of
users who are not engineering or RL experts, David-
son and Gureckis (2024) also consider goal represen-
tations based on programs (essentially DSLs) (David-
son et al., 2024) and natural languages, among other
solutions.
5 CONCLUSION
It is common practice in reinforcement learning
(RL) research to implement environments in general-
purpose programming languages or frameworks such
as CUDA or JAX for hardware acceleration. Such
implementations require engineering skills and effort,
and often leverage RL expertise to handcraft efficient
representations of the state and action spaces. In this
position paper, we have argued that this established
workflow is not accessible to smaller organisations or
private individuals who may not have access to this
expertise, and therefore hinders widespread adoption
of RL for real-world applications outside of larger
projects by teams with substantial resources.
We envision a path to addressing this concern
based on using more user-friendly languages, rang-
ing from domain-specific languages to natural lan-
guages, for describing environments. Such languages
may democratise the ability to apply policies trained
with RL to novel problems. This research agenda is
expected to involve numerous aspects. DSL-based so-
lutions will require studies of how to develop user-
friendly DSLs for describing RL problems, evalua-
tions of their user-friendliness (e.g., via user studies),
and the development of efficient compilers or even
JAX wrappers for such DSLs. Solutions based on
natural languages will require advances in the relia-
bility and consistency of LLMs. Improving the sam-
ple efficiency of RL may become even more crucial
than it already is. Our focus in this paper has been
on democratising the ability to describe RL problems,
but this will likely need to be paired up with advances
in e.g. AutoRL (Parker-Holder et al., 2022) to also
democratise the ability to effectively train policies.
Finally, using succinct, information-rich descriptions
of environments as context may open up new oppor-
tunities for generalisation and transfer in RL.
REFERENCES
Abid, A., Abdalla, A., Abid, A., Khan, D., Alfozan, A., and
Zou, J. (2019). Gradio: Hassle-free sharing and test-
ing of ML models in the wild. In 2019 ICML Work-
shop on Human in the Loop Learning.
Afshar, A. and Li, W. (2024). DeLF: Designing learning
environments with foundation models. In AAAI 2024
Workshop on Synergy of RL and LLMs.
Environment Descriptions for Usability and Generalisation in Reinforcement Learning
989

Agarwal, R., Schwarzer, M., Castro, P. S., Courville, A.,
and Bellemare, M. G. (2021). Deep reinforcement
learning at the edge of the statistical precipice. In Ran-
zato, M., Beygelzimer, A., Dauphin, Y., Liang, P., and
Vaughan, J. W., editors, Adv. Neural Inf. Proc. Syst.,
volume 34, pages 29304–29320. Curran Associates,
Inc.
Aram, M. and Neumann, G. (2015). Multilayered analysis
of co-development of business information systems.
Journal of Internet Services and Applications, 6(13).
Banerjee, B. and Stone, P. (2007). General game learning
using knowledge transfer. In 20th Int. Joint Conf. Ar-
tif. Intell., pages 672–677.
Bellemare, M. G., Naddaf, Y., Veness, J., and Bowling, M.
(2013). The arcade learning environment: An evalua-
tion platform for general agents. Journal Artif. Intell.
Research, 47(1):253–279.
Bradbury, J., Frostig, R., Hawkins, P., Johnson, M. J., Leary,
C., Maclaurin, D., Necula, G., Paszke, A., VanderPlas,
J., Wanderman-Milne, S., and Zhang, Q. (2018). JAX:
composable transformations of Python+NumPy pro-
grams.
Brockman, G., Cheung, V., Pettersson, L., Schneider, J.,
Schulman, J., Tang, J., and Zaremba, W. (2016). Ope-
nAI gym. https://arxiv.org/abs/1606.01540.
Browne, C., Soemers, D. J. N. J., Piette, É., Stephenson, M.,
and Crist, W. (2020). Ludii language reference. ludii.
games/downloads/LudiiLanguageReference.pdf.
Browne, C. B. (2009). Automatic Generation and Evalu-
ation of Recombination Games. Phd thesis, Faculty
of Information Technology, Queensland University of
Technology, Queensland, Australia.
Cobbe, K., Hesse, C., Hilton, J., and Schulman, J. (2020).
Leveraging procedural generation to benchmark rein-
forcement learning. In Daumé III, H. and Singh, A.,
editors, Proc. 37th Int. Conf. Mach. Learn., volume
119 of PMLR, pages 2048–2056.
Cobbe, K., Klimov, O., Hesse, C., Kim, T., and Schulman,
J. (2019). Quantifying generalization in reinforcement
learning. In Chaudhuri, K. and Salakhutdinov, R., ed-
itors, Proc. 36th Int. Conf. Mach. Learn., volume 97
of PMLR, pages 1282–1289. PMLR.
Dalton, S. and Frosio, I. (2020). Accelerating reinforcement
learning through GPU Atari emulation. In Larochelle,
H., Ranzato, M., Hadsell, R., Balcan, M., and Lin, H.,
editors, Adv. Neural Inf. Proc. Syst., volume 33, pages
19773–19782. Curran Associates, Inc.
Davidson, G. and Gureckis, T. M. (2024). Toward com-
plex and structured goals in reinforcement learning. In
Finding the Frame workshop @ Reinforcement Learn.
Conf.
Davidson, G., Todd, G., Togelius, J., Gureckis, T. M., and
Lake, B. M. (2024). Goals as reward-producing pro-
grams. https://arxiv.org/abs/2405.13242.
Deisenroth, M. P., Englert, P., Peters, J., and Fox, D.
(2014). Multi-task policy search for robotics. In Proc.
2014 IEEE Int. Conf. Robotics and Automation, pages
3876–3881.
Dennis, M., Jaques, N., Vinitsky, E., Bayen, A., Russell,
S., Critch, A., and Levine, S. (2020). Emergent com-
plexity and zero-shot transfer via unsupervised envi-
ronment design. In Adv. Neural Inf. Proc. Syst., vol-
ume 33, pages 13049–13061.
Desai, A., Gulwani, S., Hingorani, V., Jain, N., Karkare,
A., Marron, M., R, S., and Roy, S. (2016). Program
synthesis using natural language. In Proc. 38th Int.
Conf. Software Eng., page 345–356. ACM.
Ellis, B., Cook, J., Moalla, S., Samvelyan, M., Sun, M.,
Mahajan, A., Foerster, J. N., and Whiteson, S. (2023).
SMACv2: An improved benchmark for cooperative
multi-agent reinforcement learning. In Adv. Neural
Inf. Proc. Syst. Accepted.
Farebrother, J., Machado, M. C., and Bowling, M. (2018).
Generalization and regularization in DQN. https:
//arxiv.org/abs/1810.00123.
Freeman, C. D., Frey, E., Raichuk, A., Girgin, S., Mordatch,
I., and Bachem, O. (2021). Brax - a differentiable
physics engine for large scale rigid body simulation.
Genesereth, M. and Thielscher, M. (2014). General Game
Playing. Synthesis Lectures on Artificial Intelligence
and Machine Learning. Morgan & Claypool Publish-
ers.
Ghosh, D., Rahme, J., Kumar, A., Zhang, A., Adams,
R. P., and Levine, S. (2021). Why generalization in
RL is difficult: Epistemic POMDPs and implicit par-
tial observability. In Ranzato, M., Beygelzimer, A.,
Dauphin, Y., Liang, P., and Vaughan, J. W., editors,
Adv. Neural Inf. Proc. Syst., volume 34, pages 25502–
25515. Curran Associates, Inc.
Goldwaser, A. and Thielscher, M. (2020). Deep reinforce-
ment learning for general game playing. In 34th AAAI
Conf. Artif. Intell., pages 1701–1708. AAAI Press.
Henderson, P., Islam, R., Bachman, P., Pineau, J., Precup,
D., and Meger, D. (2018). Deep reinforcement learn-
ing that matters. In Proc. 32nd AAAI Conf. Artif. In-
tell., pages 3207–3214. AAAI.
Irpan, A. and Song, X. (2019). The principle of unchanged
optimality in reinforcement learning generalization.
In ICML 2019 Workshop on Understanding and Im-
proving Generalization in Deep Learning.
Jacob, M., Devlin, S., and Hofmann, K. (2020). “it’s un-
wieldy and it takes a lot of time” — challenges and op-
portunities for creating agents in commercial games.
In Proc. 16th AAAI Conf. Artif. Intell. Interactive Dig-
ital Entertainment, pages 88–94.
Jordan, S. M. (2022). Scientific experiments in reinforce-
ment learning. https://nips.cc/virtual/2022/63891.
Opinion talk contributed to the Deep Reinforcement
Learning Workshop at NeurIPS 2022.
Jordan, S. M., White, A., da Silva, B. C., White, M., and
Thomas, P. S. (2024). Position: Benchmarking is lim-
ited in reinforcement learning research. In Salakhut-
dinov, R., Kolter, Z., Heller, K., Weller, A., Oliver, N.,
Scarlett, J., and Berkenkamp, F., editors, Proc. 41st
Int. Conf. Mach. Learn., volume 235 of PMLR, pages
22551–22569. PMLR.
Jothimurugan, K., Alur, R., and Bastani, O. (2019). A
composable specification language for reinforcement
learning tasks. In Adv. Neural Inf. Proc. Syst., vol-
ume 32, pages 13041–13051.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
990

Justesen, N., Torrado, R. R., Bontrager, P., Khalifa, A., To-
gelius, J., and Risi, S. (2018). Illuminating general-
ization in deep reinforcement learning through proce-
dural level generation. In NeurIPS 2018 Workshop on
Deep RL.
Kharyal, C., Krishna Gottipati, S., Kumar Sinha, T., Das,
S., and Taylor, M. E. (2024). GLIDE-RL: Grounded
language instruction through DEmonstration in RL.
https://arxiv.org/abs/2401.02991.
Kirk, R., Zhang, A., Grefenstette, E., and Rocktäschel,
T. (2023). A survey of zero-shot generalisation in
deep reinforcement learning. Journal Artif. Intell. Re-
search, 76:201–264.
Koyamada, S., Okano, S., Nishimori, S., Murata, Y.,
Habara, K., Kita, H., and Ishii, S. (2023). Pgx:
Hardware-accelerated parallel game simulators for re-
inforcement learning. In Adv. Neural Inf. Proc. Syst.
Kuhlmann, G. and Stone, P. (2007). Graph-based do-
main mapping for transfer learning in general games.
In Kok, J., Koronacki, J., Mantaras, R., Matwin,
S., Mladeni
ˇ
c, D., and Skowron, A., editors, Mach.
Learn.: ECML 2007, volume 4071 of LNCS, pages
188–200. Springer, Berlin, Heidelberg.
Lange, R. T. (2022). gymnax: A JAX-based reinforcement
learning environment library.
Lange, S. and Riedmiller, M. (2010). Deep auto-encoder
neural networks in reinforcement learning. In Neu-
ral Networks. Int. Joint Conf. 2010, pages 1623–1630.
IEEE.
Lee, J. N., Xie, A., Pacchiano, A., Chandak, Y., Finn, C.,
Nachum, O., and Brunskill, E. (2023). Supervised
pretraining can learn in-context reinforcement learn-
ing. https://arxiv.org/abs/2306.14892.
Lifschitz, S., Paster, K., Chan, H., Ba, J., and McIlraith,
S. (2023). Steve-1: A generative model for text-
to-behavior in Minecraft. https://arxiv.org/abs/2306.
00937.
Love, N., Hinrichs, T., Haley, D., Schkufza, E., and Gene-
sereth, M. (2008). General game playing: Game de-
scription language specification. Technical Report
LG-2006-01, Stanford Logic Group.
Luketina, J., Nardelli, N., Farquhar, G., Foerster, J.,
Andreas, J., Grefenstette, E., Whiteson, S., and
Rocktä"schel, T. (2019). A survey of reinforcement
learning informed by natural language. In Proc. 28th
Int. Joint Conf. Artif. Intell., IJCAI-19, pages 6309–
6317.
Machado, M. C., Bellemare, M. G., Talvitie, E., Veness, J.,
Hausknecht, M., and Bowling, M. (2018). Revisiting
the arcade learning environment: Evaluation protocols
and open problems for general agents. Journal Artif.
Intell. Research, 61:523–562.
Malik, D., Li, Y., and Ravikumar, P. (2021). When is gen-
eralizable reinforcement learning tractable? In Ran-
zato, M., Beygelzimer, A., Dauphin, Y., Liang, P., and
Vaughan, J. W., editors, Adv. Neural Inf. Proc. Syst.,
volume 34, pages 8032–8045. Curran Associates, Inc.
Mannor, S. and Tamar, A. (2023). Towards deployable RL
– what’s broken with RL research and a potential fix.
https://arxiv.org/abs/2301.01320.
Maras, M., K˛epa, M., Kowalski, J., and Szykuła, M. (2024).
Fast and knowledge-free deep learning for general
game playing (student abstract). In Proc. AAAI Conf.
Artif. Intell., volume 38, pages 23576–23578.
Marcus, G., Leivada, E., and Murphy, E. (2023). A sen-
tence is worth a thousand pictures: Can large lan-
guage models understand human language? https:
//arxiv.org/abs/2308.00109.
McDermott, D., Ghallab, M., Howe, A., Knoblock, C.,
Ram, A., Veloso, M., Weld, D., and Wilkins, D.
(1998). PDDL—the planning domain definition
language. Technical Report CVC TR98003/DCS
TR1165, New Haven, CT: Yale Center for Computa-
tional Vision and Control.
Mernik, M., Heering, J., and Sloane, A. M. (2005). When
and how to develop domain-specific languages. ACM
Computing Surveys, 37(4):316–344.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing Atari with deep reinforcement learn-
ing. https://arxiv.org/abs/1312.5602.
Nichol, A., Pfau, V., Hesse, C., Klimov, O., and Schulman,
J. (2018). Gotta learn fast: A new benchmark for gen-
eralization in RL. https://arxiv.org/abs/1804.03720.
OpenAI (2022). Introducing ChatGPT. https://openai.com/
blog/chatgpt. Accessed: 2024-01-02.
Oswald, J., Srinivas, K., Kokel, H., Lee, J., Katz, M., and
Sohrabi, S. (2024). Large language models as plan-
ning domain generators. In Proc. Int. Conf. Automated
Planning and Sched., volume 34, pages 423–431.
Parker-Holder, J., Rajan, R., Song, X., Biedenkapp, A.,
Miao, Y., Eimer, T., Zhang, B., Nguyen, V., Calandra,
R., Faust, A., Hutter, F., and Lindauer, M. (2022). Au-
tomated reinforcement learning (autoRL): A survey
and open problems. Journal Artif. Intell. Research,
74:517–568.
Patterson, A., Neumann, S., White, M., and White, A.
(2023). Empirical design in reinforcement learning.
https://arxiv.org/abs/2304.01315.
Piette, É., Soemers, D. J. N. J., Stephenson, M., Sironi,
C. F., Winands, M. H. M., and Browne, C. (2020).
Ludii – the ludemic general game system. In Gia-
como, G. D., Catala, A., Dilkina, B., Milano, M.,
Barro, S., Bugarín, A., and Lang, J., editors, Proc.
24th Eur. Conf. Artif. Intell., volume 325 of Frontiers
in Artificial Intell. and Appl., pages 411–418. IOS
Press.
Raparthy, S. C., Hambro, E., Kirk, R., Henaff, M., and
Raileanu, R. (2023). Generalization to new sequen-
tial decision making tasks with in-context learning.
https://arxiv.org/abs/2312.03801.
Reed, S.,
˙
Zołna, K., Parisotto, E., Colmenarejo, S. G.,
Novikov, A., Barth-Maron, G., Giménez, M., Sulsky,
Y., Kay, J., Springenberg, J. T., Eccles, T., Bruce, J.,
Razavi, A., Edwards, A., Heess, N., Chen, Y., Had-
sell, R., Vinyals, O., Bordbar, M., and de Freitas, N.
(2023). A generalist agent. Trans. Mach. Learn. Re-
search.
Riedmiller, M. (2005). Neural fitted Q iteration - first ex-
periences with a data efficient neural reinforcement
Environment Descriptions for Usability and Generalisation in Reinforcement Learning
991

learning method. In Mach. Learn.: ECML 2005, vol-
ume 3720 of LNCS, pages 317–328. Springer.
Rigter, M., Jiang, M., and Posner, I. (2024). Reward-free
curricula for training robust world models. In Int.
Conf. Learn. Representations.
Rodriguez-Sanchez, R., Spiegel, B. A., Wang, J., Patel, R.,
Tellex, S., and Konidaris, G. (2023). RLang: A declar-
ative language for describing partial world knowledge
to reinforcement learning agents. In Krause, A., Brun-
skill, E., Cho, K., Engelhardt, B., Sabato, S., and Scar-
lett, J., editors, Proc. 40th Int. Conf. Mach. Learn.,
volume 202 of PMLR, pages 29161–29178. PMLR.
Samvelyan, M., Kirk, R., Kurin, V., Parker-Holder, J.,
Jiang, M., Hambro, E., Petroni, F., Küttler, H.,
Grefenstette, E., and Rocktäschel, T. (2021). Mini-
hack the planet: A sandbox for open-ended reinforce-
ment learning research. In Adv. Neural Inf. Proc. Syst.
Seger, E., Ovadya, A., Siddarth, D., Garfinkel, B., and
Dafoe, A. (2023). Democratising AI: Multiple mean-
ings, goals, and methods. In Proc. 2023 AAAI/ACM
Conf. AI, Ethics, and Society, pages 715–722.
Silver, T. and Chitnis, R. (2020). PDDLGym: Gym environ-
ments from PDDL problems. In ICAPS Workshop on
Bridging the Gap Between AI Planning and RL (PRL).
Simkute, A., Luger, E., Evans, M., and Jones, R. (2024). “it
is there, and you need it, so why do you not use it?”
achieving better adoption of AI systems by domain
experts, in the case study of natural science research.
https://arxiv.org/abs/2403.16895.
Soemers, D. J. N. J., Mella, V., Browne, C., and Teytaud, O.
(2022). Deep learning for general game playing with
Ludii and Polygames. ICGA Journal, 43(3):146–161.
Soemers, D. J. N. J., Mella, V., Piette, É., Stephenson,
M., Browne, C., and Teytaud, O. (2023). Towards
a general transfer approach for policy-value networks.
Trans. Mach. Learn. Research.
Stevens, G. C. (1983). User-friendly computer systems?: A
critical examination of the concept. Behaviour & Inf.
Tech., 2(1):3–16.
Stone, A., Ramirez, O., Konolige, K., and Jonschkowski,
R. (2021). The distracting control suite – a challeng-
ing benchmark for reinforcement learning from pixels.
https://arxiv.org/abs/2101.02722.
Sun, S.-H., Wu, T.-L., and Lim, J. J. (2020). Program
guided agent. In Int. Conf. Learn. Representations.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement Learn-
ing: An Introduction. MIT Press, Cambridge, MA, 2
edition.
Tassa, Y., Doron, Y., Muldal, A., Erez, T., Li, Y.,
de Las Casas, D., Budden, D., Abdolmaleki, A.,
Merel, J., Lefrancq, A., Lillicrap, T., and Riedmiller,
M. (2018). DeepMind control suite.
Todd, G., Padula, A., Stephenson, M., Piette, É., Soemers,
D. J. N. J., and Togelius, J. (2024). GAVEL: Generat-
ing games via evolution and language models. In Adv.
Neural Inf. Proc. Syst., volume 37. Accepted.
Voelcker, C., Hussing, M., and Eaton, E. (2024). Can we
hop in general? A discussion of benchmark selection
and design using the Hopper environment. In Finding
the Frame workshop @ RLC.
Whiteson, S., Tanner, B., Taylor, M. E., and Stone, P.
(2011). Protecting against evaluation overfitting in
empirical reinforcement learning. In 2011 IEEE
Symp. Adaptive Dynamic Programming and Rein-
forcement Learn., pages 120–127.
Yang, M., Du, Y., Ghasemipour, K., Tompson, J., Kael-
bling, L., Schuurmans, D., and Abbeel, P. (2024).
Learning interactive real-world simulators. In Int.
Conf. Learn. Representations.
Zhang, A., Ballas, N., and Pineau, J. (2020). A dissection of
overfitting and generalization in continuous reinforce-
ment learning. https://arxiv.org/abs/1806.07937.
Zhang, C., Vinyals, O., Munos, R., and Bengio, S. (2018).
A study on overfitting in deep reinforcement learning.
https://arxiv.org/abs/1804.06893.
Zhao, W., Queralta, J. P., and Westerlund, T. (2020). Sim-
to-real transfer in deep reinforcement learning for
robotics: A survey. In 2020 IEEE Symp. Ser. Com-
put. Intell. (SSCI), pages 737–744.
Zhao, W. X., Zhou, K., Li, J., Tang, T., Wang, X., Hou,
Y., Min, Y., Zhang, B., Zhang, J., Dong, Z., Du, Y.,
Yang, C., Chen, Y., Chen, Z., Jiang, J., Ren, R., Li,
Y., Tang, X., Liu, Z., Liu, P., Nie, J.-Y., and Wen, J.-
R. (2023). A survey of large language models. https:
//arxiv.org/abs/2303.18223. Accessed: 25-01-2024.
Zhong, V., Rocktäschel, T., and Grefenstette, E. (2020).
RTFM: Generalising to novel environment dynamics
via reading. In Int. Conf. Learn. Representations.
Zuo, M., Velez, F. P., Li, X., Littman, M. L., and Bach,
S. H. (2024). Planetarium: A rigorous benchmark
for translating text to structured planning languages.
https://arxiv.org/abs/2407.03321.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
992
