
Collision Avoidance and Return Manoeuvre Optimisation for
Low-Thrust Satellites Using Reinforcement Learning
Alexandru Solomon and Ciprian Paduraru
University of Bucharest, Department of Computer Science, Bucharest, Romania
Keywords:
Collision Avoidance, Return Manoeuvre, Manoeuvre Optimisation, Reinforcement Learning, DQN, PPO,
REINFORCE.
Abstract:
Collision avoidance is an essential aspect of day-to-day satellite operations, enabling operators to carry out
their missions safely despite the rapidly growing amount of space debris. This paper presents the capabilities
of reinforcement learning (RL) approaches to train an agent capable of collision avoidance manoeuvres for
low-thrust satellites in low-Earth orbit. The collision avoidance process performed by the agent consists of
optimizing a collision avoidance manoeuvre as well as the return manoeuvre to the original orbit. The focus
is on satellites with low thrust propulsion systems, since the optimization process of a manoeuvre performed
by such a system is more complex than for an impulsive system and therefore more interesting to be solved by
RL methods. The training process is performed in a simulated environment of space conditions for a generic
satellite in LEO subjected to a collision from different directions and with different velocities. This paper
presents the results of agents trained with RL in training scenarios as well as in previously unknown situations
using different methods such as DQN, REINFORCE, and PPO.
1 INTRODUCTION
This research aims to develop an algorithm for com-
puting a collision avoidance manoeuvre followed by
a return to the original orbit for a satellite with low-
thrust propulsion. The algorithm takes the satellite’s
orbit, the space object’s orbit, and the collision time as
inputs while minimizing propellant usage. The prob-
lem was framed as a reinforcement learning (RL) task
in a simulated environment.
The algorithms used for the task are the REIN-
FORCE (Sutton and Barto, 2018) and PPO (Schul-
man et al., 2017) algorithms in the continuous action
space setting, while the DQN (Mnih et al., 2013) al-
gorithm is used in the discrete action space setting.
The implementation of the environment
1
, as well as
the learning agent
2
, along with experiments and re-
sults are made open source on GitHub.
To the authors’ knowledge, this is the first work
that attempts to optimize the collision avoidance ma-
noeuvre and the return manoeuvre simultaneously us-
ing RL techniques. In principle, this allows the RL
agents to compute overall more efficient solutions to
1
https://github.com/AlexSolomon99/SatColAvoidEnv
2
https://github.com/AlexSolomon99/SatColAvoidance
the collision avoidance problem than if they were to
analyze the two manoeuvre problems separately. As
shown in the literature review, Section 2, previous re-
search focused on solving just one aspect of the prob-
lem, making direct comparisons difficult. The envi-
ronment developed in this paper is available for future
research in academia and industry, providing a bench-
mark for further studies.
We summarize the most important contributions
of this research as follows:
• An RL algorithm that is able to solve the CAM
(Collision Avoidance Manoeuvre) optimization
problem and the orbital change optimization prob-
lem (the return manoeuvre) simultaneously.
• An RL algorithm capable of solving the CAM op-
timization problem with both a discrete and a con-
tinuous action space;
• An OpenAI gym environment architecture and im-
plementation suitable for simulations of satellite
conjunctions, for future research in academia and
industry.
The paper is structured as follows. The next sec-
tion presents previous work on the topic under discus-
sion. Section 3 describes the proposed new methods.
The evaluation and discussion of the results of these
approaches is presented in Section 4. In the last sec-
Solomon, A. and Paduraru, C.
Collision Avoidance and Return Manoeuvre Optimisation for Low-Thrust Satellites Using Reinforcement Learning.
DOI: 10.5220/0013249000003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 3, pages 1009-1016
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
1009

tion, conclusions and possible perspectives for future
work are presented.
2 RELATED WORK
One of the most common traditional approaches for
trying to compute an optimal low-thrust manoeuvre is
to divide the projected trajectory into arcs, followed
by an individual optimization of each arc, as men-
tioned in (D. M. Novak, 2011) or (Whiffen, 2006). As
detailed in (Tipaldi et al., 2022), there are many tasks
related to satellite control that are addressed with
RL approaches, such as Spacecraft systems touching
down on extraterrestrial bodies (Gaudet et al., 2020;
B. Gaudet, 2020), GTO/GEO transfers (Holt et al.,
2021), interplanetary trajectory design (Zavoli and
Federici, 2021), and even constellation orbital control
(Yang et al., 2021).
2.1 RL Based CAM Optimization
In (Pinto et al., 2020), a Bayesian deep learning
approach using RNNs predicts collision probability
(PoC) from conjunction data messages (CDMs). A
similar method using LSTMs and GRUs to predict
event risk was explored in (Boscolo Fiore, 2021), but
with limited success. In (N. Bourriez, 2023), a Deep
Recurrent Q-Network (DRQN) was used to compute
collision avoidance maneuvers (CAMs) in simulated
conjunctions. The approach, involving partial ob-
servations and discrete thrust actions for 3D maneu-
vers, showed consistent improvement in the Huber
loss across episodes, though cumulative rewards were
not quantitatively measured.
2.2 RL-Based Optimization of the
Orbital Transfer
In orbital transfer optimization, the agent is re-
warded based on how close the current trajectory
is to the target one. (LaFarge et al., 2021) ex-
plores closed-loop steering in dynamic multi-body
environments, while (Casas et al., 2022) trains an
agent to operate MEO satellite thrusters for pericen-
ter lifting using the Advantage Actor Critic algorithm.
(Kolosa, 2019) successfully addresses three orbital
change tasks—general orbital change, semimajor axis
change, and inclination change—using the Deep De-
terministic Policy Gradient (DDPG) algorithm, with
observations based on equinoctial orbital elements.
3 METHODS
3.1 Environment Description
This article develops an agent to control a satellite’s
thrusters for collision avoidance and return to the
original orbit. The problem is framed as an RL task,
with the agent learning through interactions in a sim-
ulated environment based on OpenAI’s gymnasium
API
3
and inspired by similar work
4
(Casas et al.,
2022).
The environment simulates a low-Earth orbit re-
gion where a satellite with low-thrust propulsion faces
a collision. General parameters are detailed in Table
1, and the agent-environment interaction is explained
in the following subsections.
3.1.1 Episode Setup
The general idea of the setup is that the collision set-
ting is created first. The position of the satellite is
created at a specific location, then the location of the
piece of debris is created in its vicinity, to ensure the
collision, and then their states are propagated back-
wards. These 3 processes are described below.
Satellite Orbit Creation
The orbit of the satellite is created by defining the 6
Keplerian elements and the corresponding time epoch
that uniquely describes the position of the satellite in
time and space. The default values for the first 5 Ke-
plerian elements (i.e. excluding the true anomaly υ)
are by default set to the values specified in the Ta-
ble 1. The true anomaly (υ) and the corresponding
time epoch are randomly generated so that the agent
can learn its task regardless of the collision position
or time.
Figure 1: Schematic interaction between the Agent and the
Environment.
3
https://gymnasium.farama.org/index.html
4
https://github.com/zampanteymedio/
gym-satellite-trajectory
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
1010
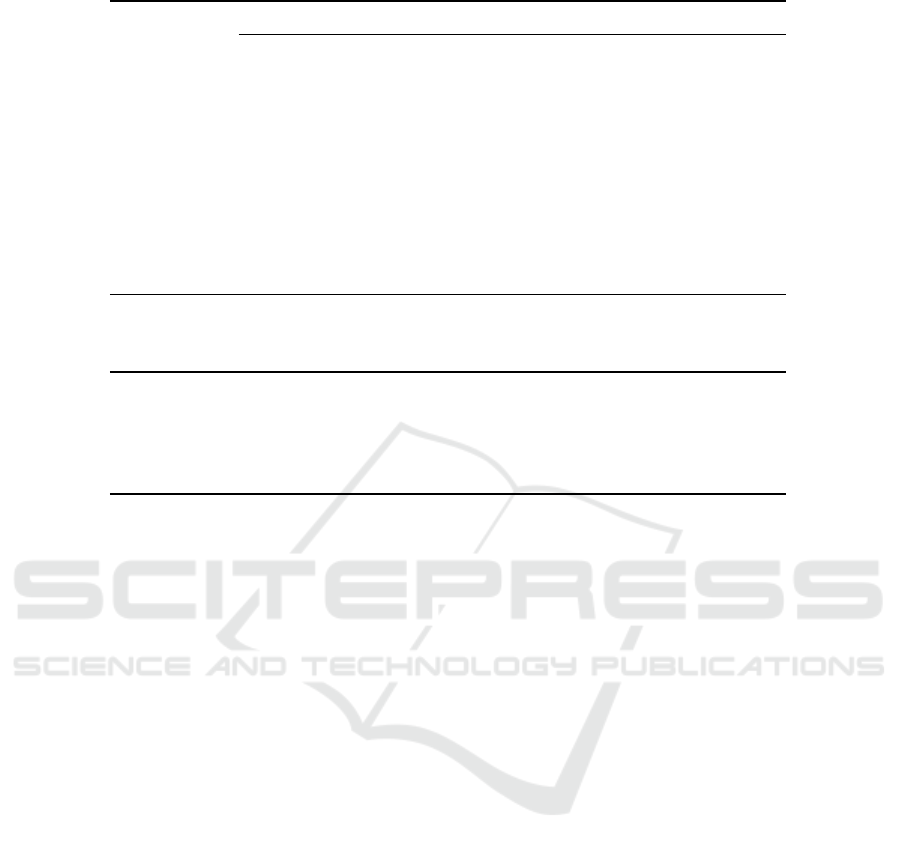
Table 1: Environment Parameters.
Name Value Unit
Satellite
Parameters
SMA (a) 6795 [km]
e 0.18 -
i 21.64 [°deg]
ω 22.02 [°deg]
Ω 60.0 [°deg]
υ 0.0 [°deg]
Mass 100.0 [kg]
Surface area 1.0 [m
2
]
Reflection index 2.0 -
Thruster force 0.1 [mN]
Thruster I
sp
4000.0 [s]
Debris
Parameters
Debris mass 10.0 [kg]
Debris surface area 1.0 [m
2
]
Debris reflection index 2.0 -
Propagation
Parameters
Method Dormand Prince
Integrator min step 1.0
Integrator max step 200.0
Error threshold 1.0 [m]
Perturbations Not Applied
Scenario
Parameters
Time of collision 2023/06/16 - 00:00:00.0 [UTC]
Time to avoid collision 4.0 [days]
Collision Min Distance 2000.0 [m]
Time to return to initial orbit 4.0 [days]
Time step size 600.0 [s]
Piece of Debris Orbit Creation
The position vector ⃗r
d
and the velocity vector ⃗v
d
of
the debris piece, components of the state vector, are
generated using the state vector of the target satellite
at the TCA:
⃗r
d
=⃗r
t
+ 10.0 ·⃗r
∆
; ⃗r
∆
∼ Uniform(0,1)
3
⃗v
d
= −⃗v
t
+ 10.0 ·⃗v
∆
; ⃗v
∆
∼ Uniform(0,1)
3
(1)
where⃗r
t
and ⃗v
t
are the position vector and the veloc-
ity vector of the target satellite at the TCA. The veloc-
ity of the debris is chosen to be opposite to the target
satellite to avoid a long encounter collision.
Propagation to the Initial State
A numerical propagator is created for each of the 2
space objects, the target satellite and the piece of de-
bris. The propagator is created using the parameters
in the Table 1.
The initial state of the target satellite is set to four
days before the TCA. Therefore, the propagator as-
sociated with the target satellite is used to propagate
the state at the TCA of the target satellite 4 days into
the past. This total duration is discretized in time by
using the time step size mentioned in the Table 1.
Similarly, the initial state of the piece of debris is
propagated backwards. The position of the piece of
debris is only relevant in the vicinity of the collision
state. Therefore, the state of the piece of debris is only
propagated 40 minutes into the past, using the same
time step size as in the case of the target satellite.
3.1.2 Observation Generation
The observation represents the information that the
agent receives from the environment based on the cur-
rent state. The observation is made up of four main
components:
• State of the target satellite object;
• State of the piece of debris;
• Time until collision;
• Amount of fuel consumed;
The encoding of the information related to these four
components is given to the agent using different ap-
proaches, with the differences between the two shown
in the Table 5.
Collision Avoidance and Return Manoeuvre Optimisation for Low-Thrust Satellites Using Reinforcement Learning
1011

3.1.3 Actions
In each step, the agent has the option of controlling
the thrusters of the target satellite, which are fired for
the entire duration of the time step at the thrust level
selected by the agent. The thrust vector is projected
onto the three orthogonal axes that define the refer-
ence frame (either the GCRF or VNC, as given in the
Table 5).
3.1.4 Reward System
The reward system is one of the most important things
in a reinforcement learning setup, as it specifies the
goal that the agent must achieve. The goals on which
the rewards are based are the following:
1. Collision Avoidance. The minimum distance be-
tween the target satellite and the debris must be
greater than a certain threshold value ∆r
c
.
2. Return to Original Orbit. The maximum dif-
ference between the final Keplerian elements and
the initial elements must be smaller than a set of
thresholds (∆r
a
, ∆r
e
, ∆r
i
, ∆r
ω
, ∆r
Ω
).
3. Fuel Consumption. The fuel consumed by the
satellite’s engines must be minimized.
4. Realism. For the duration of the event, the satel-
lite must follow orbits that are not too low (impact
on Earth) and not too high (leaving LEO).
During the development phase, the values of the
thresholds and the specific steps at which the rewards
are returned have changed. However, the function that
calculates the reward signal has the general form:
R = −(W
c
· r
c
+ R
ret
+W
f
· r
f
+ R
bound
) (2)
The components of the reward signal are detailed be-
low:
• W
c
, r
c
: The weight and reward contribution corre-
sponding to (not) avoiding the collision:
r
c
= max(∆r
c
− min(∥⃗r
t,i
−⃗r
d,i
∥),0)
∆r
c
= 2000 [m]
(3)
where ”i” stands for all epochs in which the posi-
tion vector of the debris is known. W
c
varies de-
pending on the approach, specific values are given
in the Table 5.
• R
ret
: The return corresponding to the (non-)return
to the original orbit. 2 approaches have been de-
fined:
Approach-1:
R
ret
=
(a,e,i,ω,Ω)
∑
k
0.2 ·C
k
(4)
C
k
=
(
0, if ∆
k
< ∆r
k
1, Otherwise
Approach-2:
R
ret
=
(a,e,i,ω,Ω)
∑
k
W
k
· max(∆
k
− ∆r
k
,0) (5)
W
k
=
0.002, k = a
0.01, k = e
0.01, k = i
0.1, k = ω
0.001, k = Ω
where ∆
k
is the absolute difference between the
current Keplerian element k and the original el-
ement. ∆r
k
is the corresponding threshold value
for the k element. Specific values for ∆r
k
can be
found in section 4, in the Table 5.
• W
f
, r
f
: The weight and premium contribution de-
pending on fuel consumption:
r
f
= (M
i
− M
c
)/M
i
W
f
= 10000
(6)
where M
i
and M
c
are the original and current mass
of the satellite.
• R
bound
: The return corresponding to leaving the
orbital boundaries:
R
bound
=
(
0 , if 6500 < ∥⃗r
target
∥ < 8000 [km]
10 , otherwise
(7)
3.2 Agent Implementation
The agent is an algorithm that is able to perform ac-
tions in certain states and improve the quality of these
actions based on the rewards received from the envi-
ronment. There are 3 algorithms that serve as agents
in the environment described in the previous section:
REINFORCE, DQN and PPO.
3.2.1 REINFORCE
REINFORCE is one of the simplest RL algorithms
that can be implemented. It is an on-policy algorithm,
i.e. the policy that is optimized is also the one used
to select actions in training. In this scenario, the al-
gorithm is used for the continuous action space, al-
though it could have been used for the discrete action
space.
The policy is a neural network which outputs the
mean (µ) and standard deviation (std) of the distribu-
tions from which the action components are selected.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
1012

The discount factor γ is a measure of how much rel-
evance current actions have for future rewards and
the number of training steps represents the number of
episodes used for training before an episode is used
purely for evaluation. The hyperparameters used for
the REINFORCE algorithm are specified in the Table
2:
Table 2: Hyperparameters used in the REINFORCE algo-
rithm.
Hyperparameter Name Value
Discount factor γ 0.99
Number of training steps 5
Hidden Layer 1 size 128
Hidden Layer 2 size 64
Optimiser Adam
Learning rate 0.01
3.2.2 Deep Q-Network
The Deep Q-Network (DQN) algorithm is an off-
policy algorithm, in contrast to the previously pre-
sented one. DQN uses a ε greedy approach for select-
ing actions during training. It is also an algorithm that
can only be used in the context of discrete actions:
a = (a
1
,a
2
,a
3
), with a
i
∈ {−1,0,1}
(8)
In the DQN implementation, both the policy net-
work (Q-net) and the target network are neural net-
works with identical architectures but different pa-
rameters. They output the expected reward for each
action. A key feature in the current implementation
is the addition of a normalization layer. In Approach-
1, observations were normalized in the environment,
while in Approach-2, normalization was handled by a
normalisation layer added to the network.
The replay memory (R
M
) is used, which stores
experiences in a double-ended queue (”deque”) and
randomly selects them for model updates. To sta-
bilize training, the gradients of the Q-net parame-
ters are truncated to prevent excessive gradient norms.
The hyperparameters used in the implementation of
the DQN algorithm for the 2 different approaches are
listed in the Table 3.
3.2.3 Proximal Policy Optimization
The PPO algorithm uses a combination of a policy
gradient algorithm, called Actor, and a value-based
algorithm, called Critic. The PPO algorithm imple-
mented in this article is used in a continuous space
and follows the implementation developed in (Schul-
man et al., 2017). The reason for choosing PPO is its
stability in the training process, which results from the
Table 3: Hyperparameters used in the DQN algorithm.
Hyperparameter
Name
Value
Apr. 1
Value
Apr. 2
Action space [-1, 0, 1] [-1, 0, 1]
Batch size 128 128
Replay Memory size 10000 10000
Discount factor γ 0.99 0.99
ε
start
0.9 0.9
ε
end
0.05 0.05
ε
decay
1000 100000
τ 0.005 0.005
Norm Layer No Yes
Hidden Layer 1 size 500 128
Hidden Layer 2 size 200 64
Optimiser Adam Adam
Learning rate 0.0001 0.0001
Clip Norm 5 5
update strategy used for the actor. The neural network
used to represent the actor (the policy) is designed us-
ing the hyperparameters given in the Table 4.
Table 4: Hyperparameters used in the PPO algorithm.
Hyperparameter Name Value
Steps per epoch 5 x 1151 (5 episodes)
Discount factor γ 0.99
GAE λ factor 0.97
Maximum KL 0.025
Maximum optimisation steps 80
Clip ratio ε 0.2
Learning rate actor 0.0003
Learning rate critic 0.001
Actor Hidden Layer 1 size 128
Actor Hidden Layer 2 size 64
Critic Hidden Layer 1 size 64
Optimiser Adam
4 EVALUATION
This section presents the results obtained by train-
ing the three RL algorithms presented in the previ-
ous section with the two main approaches developed.
Approach-1 represents the first set of parameters that
showed relevant results, while Approach-2 represents
the final set of parameters that showed the best re-
sults in the more restrictive setting. Approach-2 is an
improvement over Approach-1. The main differences
between the two approaches are described in the Ta-
ble 5.
The models are compared both quantitatively and
qualitatively. The evaluation of an agent includes:
• Raw Reward Sum: The sum of the rewards re-
ceived for the duration of an episode. This value
is averaged over 30 independent runs.
Collision Avoidance and Return Manoeuvre Optimisation for Low-Thrust Satellites Using Reinforcement Learning
1013
• Collision Avoidance Status: The collision must
be avoided under all circumstances.
• Return to Original Orbit: The evolution of the
first 5 Keplerian elements is analyzed quantita-
tively and qualitatively. The agent returns to the
original orbit if all elements in the final state are
within the specified threshold values.
• Fuel Consumption: If all previous conditions are
met, a model with lower fuel consumption is pre-
ferred.
• Action Choices: The agent that performs the
fewest actions and has a smoother action change
is preferred.
4.1 Approach-1 Results
The algorithms REINFORCE, DQN and PPO have
been trained and the test results are available in the Ta-
ble 6. The columns ”Collision Avoided” and ”Returns
to Orbit” show the percentage of episodes in which
the agent reached the corresponding target, while the
column ”Fuel Used” shows the percentage of fuel
used out of the total amount that could potentially
have been used.
The table shows that the DQN algorithm per-
formed best of the three algorithms. However, the
goals that had to be achieved were not very restrictive
for Approach-1 - see Table 5. The thresholds defining
the initial orbit are rather loose, which is one of the
reasons why the model seemed to perform so well.
In fact, not all episodes return to the initial orbital el-
ements - in some cases the elements deviate further
from the initial elements. However, since the thresh-
olds are not very restrictive, the final orbit was still
within the appropriate range to be called equivalent
to the initial orbit. Approach-2 addresses some of the
issues observed with this first approach.
4.2 Approach-2 Results
In Approach-2, emphasis was placed on the task of
returning to the initial orbit. The steps at which the re-
turn was rewarded (or penalized) were increased and
the thresholds were significantly lowered (see Table
5) to penalize excessive deviations. In addition, the
reward contribution of the return to the initial orbit
component has been changed to be optimizable in-
stead of a step function (Equation 5). This is all done
to incentivize the agent to return to the initial orbit.
The observation structure was changed, as was
the reference frame of the manoeuvre presentation,
as described in the Table 5. The test results ob-
tained with Approach-2 are shown in the Table 7.
The results are not directly comparable with those of
Table 5: Implementation differences between approaches.
Element Approach-1 Approach-2
Satellite state representation Cartesian Coordinates - GCRF Keplerian Elements
Piece of debris representation Sequence of State-Vectors Estimated min. distance (between
satellite and debris)
Manouevre Thrust Components GCRF ref. frame VNC ref. frame
Coll. Avoid. reward weight (W
c
) 0.01 0.0005
Return to Orbit Thresholds
Semi-major axis (∆r
a
) 500.0 [m] 10.0 [m]
Eccentricity (∆r
e
) 0.001 1e-8
Inclination (∆r
i
) 1.0 [rad] 1e-8 [rad]
Argument of Perigee (∆r
ω
) 10.0 [rad] 10.0 [rad]
RAAN (∆r
Ω
) 1.0 [rad] 1e-8 [rad]
Table 6: Agents comparison averaged over 30 episodes - Approach-1.
Rewards Sum Rewards Std Coll. Avoided [%] Orbit Return [%] Fuel Used [%]
REINF. -3.28 0.10 100 70 84.18
DQN -0.68 0.19 100 100 16.6
PPO -2.34 0.74 100 3 22.62
Table 7: Agents comparison averaged over 30 episodes - Approach-2.
Rewards Sum Rewards Std Coll. Avoided [%] Orbit Return [%] Fuel Used [%]
REINF. -1301.48 67.22 100 0 78.29
DQN -258.51 74.44 100 0 52.83
PPO -175.23 11.59 100 0 38.49
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
1014
Approach-1, as the reward system and the observa-
tion structure differ significantly. The task of return-
ing to the original orbit was also not fulfilled by all
models in all episodes performed, which is expected
given the extremely strict thresholds. Qualitatively,
all agents trained according to Approach-2 performed
better than the agents trained according to Approach-
1.
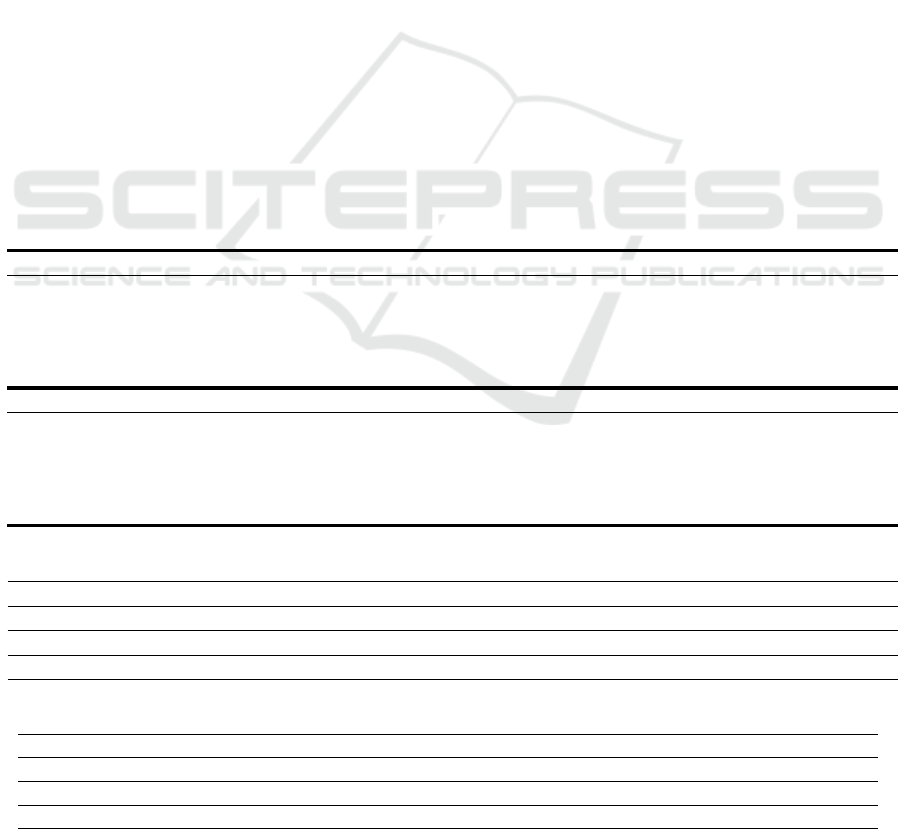
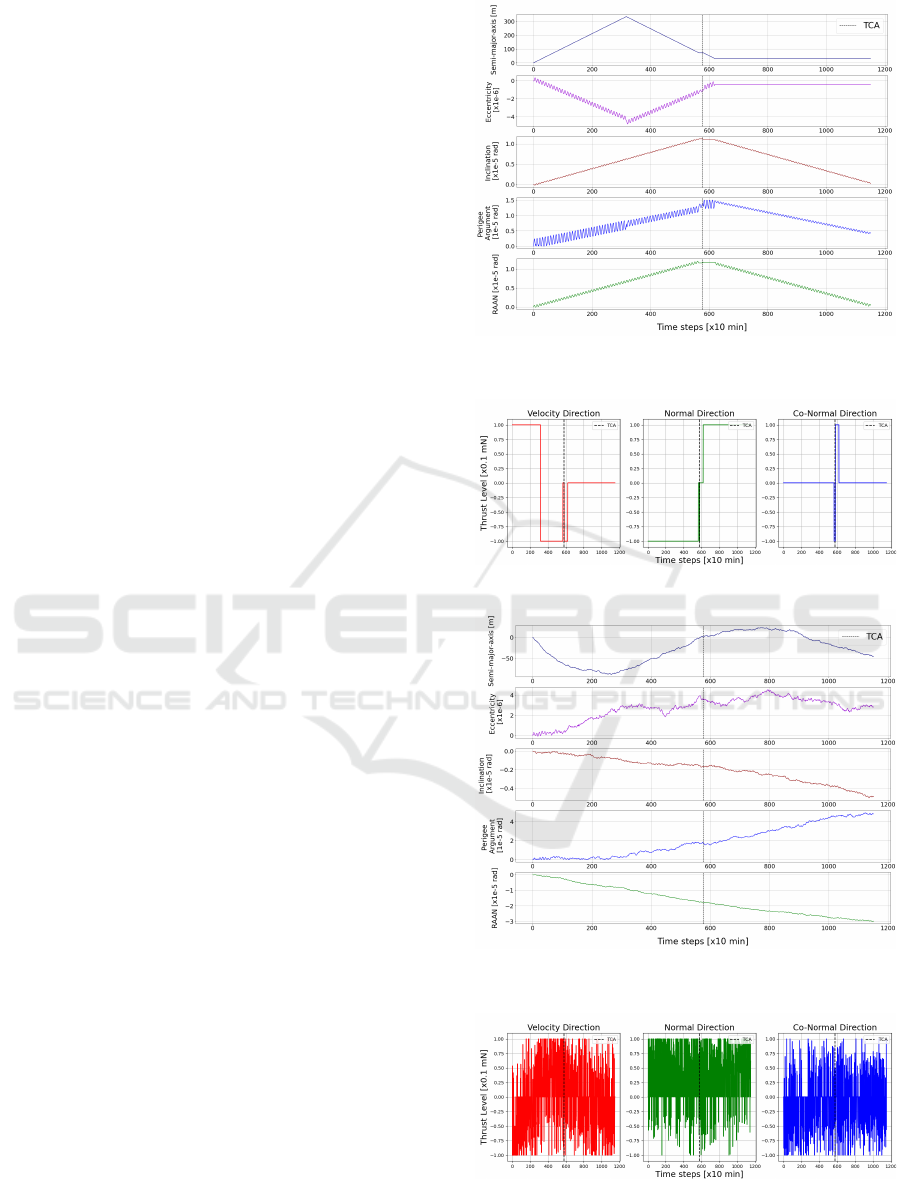
Just looking at the numbers, it looks like the
PPO model achieves the best overall results with
Approach-2. It has the highest reward sum over the
evaluation episodes, the smallest standard deviation
and the lowest fuel consumption. However, when
looking at the evolution of the Keplerian elements and
the action profiles (Figures 2 - 5), the DQN model
is the clear favorite. The development of the Kep-
lerian elements follows the same pattern in almost
all episodes as in Figure 2 for the DQN model: a
clear, steady increase in the absolute magnitudes of
the differences to the initial elements, followed by
a steady decline, almost to the same starting point.
Looking at the action profiles in Figure 3, there are
also no rapid fluctuations or long periods of fluctua-
tion. These rapid fluctuations are however present in
the manoeuvres computed by the PPO model. This
is expected, given the model operates in the continu-
ous action space setting. Even though the PPO model
obtains the best results quantitatively, the sequence of
manoeuvres given by the model are unpractical.
5 CONCLUSIONS
This paper presents an algorithm for collision avoid-
ance and return manoeuvres for a low-thrust satel-
lite in Low-Earth orbit, using reinforcement learning
(RL). A simulated environment allowed the agents to
learn from different states and optimize thruster con-
trol to avoid collisions, return to the original orbit, and
minimize fuel consumption.
Three algorithms were tested: REINFORCE, PPO
(for the continuous action space), and DQN (for the
discrete action space). Two approaches were ex-
plored. In Approach-1, satellite states and actions
were given in the GCRF reference frame, and the
agent received sparse rewards. Approach-2 used Ke-
plerian elements, frequent rewards, and stricter goals.
All algorithms avoided collisions, but returning to the
initial orbit was challenging, especially in the con-
tinuous action space. The PPO algorithm favored
fuel efficiency, while DQN succeeded in both tasks,
though often at a higher fuel cost. The discrete ac-
tion space formulation proved easier to implement
and more effective for the task.
Figure 2: Keplerian Elements Variation - DQN Approach-2
(Best Model Qualitatively).
Figure 3: Agent Actions - DQN Approach-2.
Figure 4: Keplerian Elements Variation - PPO Approach-2
(Best Model Quantitatively).
Figure 5: Agent Actions - PPO Approach-2.
Collision Avoidance and Return Manoeuvre Optimisation for Low-Thrust Satellites Using Reinforcement Learning
1015

Ultimately, the DQN algorithm in Approach-2
provided the best results, showing that RL can ef-
fectively optimize collision avoidance and return ma-
noeuvres for low-thrust satellites.
ACKNOWLEDGMENT
We thank the International Astronautical Congress,
IAC 2024, Milan, Italy, October 14-18, 2024, for
feedback offered on a preliminary form of this work.
This research is partially supported by the project
“Romanian Hub for Artificial Intelligence - HRIA”,
Smart Growth, Digitization and Financial Instru-
ments Program, 2021-2027, MySMIS no. 334906
and a grant of the Ministry of Research, Innovation
and Digitization, CNCS/CCCDI-UEFISCDI, project
no. PN-IV-P8-8.1-PRE-HE-ORG-2023-0081, within
PNCDI IV.
REFERENCES
B. Gaudet, R. Linares, R. F. (2020). Six degree-of-freedom
body-fixed hovering over unmapped asteroids via li-
dar altimetry and reinforcement meta-learning. Acta
Astronautica, 172:90–99.
Boscolo Fiore, N. (2021). Machine Learning based Satellite
Collision Avoidance strategy. PhD thesis, Politecnico
Milano.
Casas, C. M., Carro, B., and Sanchez-Esguevillas, A.
(2022). Low-thrust orbital transfer using dynamics-
agnostic reinforcement learning.
D. M. Novak, M. V. (2011). Improved shaping approach to
the preliminary design of low-thrust trajectories. Jour-
nal of Guidance, Control, and Dynamics.
Gaudet, B., Linares, R., and Furfaro, R. (2020). Adaptive
guidance and integrated navigation with reinforce-
ment meta-learning. Acta Astronautica, 169:180–190.
Holt, H., Armellin, R., Baresi, N., Hashida, Y., Turconi, A.,
Scorsoglio, A., and Furfaro, R. (2021). Optimal q-
laws via reinforcement learning with guaranteed sta-
bility. Acta Astronautica, 187:511–528.
Kolosa, D. S. (2019). A Reinforcement Learning Approach
to Spacecraft Trajectory Optimization. PhD thesis,
Western Michigan University.
LaFarge, N. B., Miller, D., Howell, K. C., and Linares, R.
(2021). Autonomous closed-loop guidance using re-
inforcement learning in a low-thrust, multi-body dy-
namical environment. Acta Astronautica, 186:1–23.
Mnih, V. et al. (2013). Playing atari with deep reinforce-
ment learning. https://arxiv.org/abs/1312.5602.
N. Bourriez, A. Loizeau, A. F. A. (2023). Spacecraft au-
tonomous decision-planning for collision avoidance :
a reinforcement learning approach. 74th INTERNA-
TIONAL ASTRONAUTICAL CONGRESS (IAC).
Pinto, F. et al. (2020). Towards automated satellite con-
junction management with bayesian deep learning.
Proceedings of NeurIPS 2020, AI for Earth Sciences
Workshop.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization al-
gorithms. Arxiv.org/abs/1707.06347.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement Learn-
ing: An Introduction. MIT Press, Cambridge, MA,
2nd edition.
Tipaldi, M., Iervolino, R., and Massenio, P. R. (2022). Rein-
forcement learning in spacecraft control applications:
Advances, prospects, and challenges. Annual Reviews
in Control, 54:1–23.
Whiffen, G. (2006). Mystic: Implementation of the
static dynamic optimal control algorithm for high-
fidelity, low-thrust trajectory design. Proceedings of
AIAA/AAS Astrodynamics Specialist Conference and
Exhibit.
Yang, C., Zhang, H., and Gao, Y. (2021). Analysis of
a neural-network-based adaptive controller for deep-
space formation flying. Advances in Space Research,
68(1):54–70.
Zavoli, A. and Federici, L. (2021). Reinforcement learn-
ing for robust trajectory design of interplanetary mis-
sions. Journal of Guidance, Control, and Dynamics,
44(8):1440–1453.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
1016
