
Domain-Incremental Semantic Segmentation for Autonomous Driving
Under Adverse Driving Conditions
Shishir Muralidhara
1,2 a
, Ren
´
e Schuster
1,2 b
and Didier Stricker
1,2 c
1
German Research Center for Artificial Intelligence (DFKI), Trippstadter Straße 122, Kaiserslautern, Germany
2
RPTU - University of Kaiserslautern-Landau, Gottlieb-Daimler-Straße 47, Kaiserslautern, Germany
Keywords:
Continual Learning, Continual Semantic Segmentation, Domain-Incremental Learning.
Abstract:
Semantic segmentation for autonomous driving is an even more challenging task when faced with adverse
driving conditions. Standard models trained on data recorded under ideal conditions show a deteriorated per-
formance in unfavorable weather or illumination conditions. Fine-tuning on the new task or condition would
lead to overwriting the previously learned information resulting in catastrophic forgetting. Adapting to the
new conditions through traditional domain adaption methods improves the performance on the target domain
at the expense of the source domain. Addressing these issues, we propose an architecture-based domain-
incremental learning approach called Progressive Semantic Segmentation (PSS). PSS is a task-agnostic, dy-
namically growing collection of domain-specific segmentation models. The task of inferring the domain and
subsequently selecting the appropriate module for segmentation is carried out using a collection of convolu-
tional autoencoders. We extensively evaluate our proposed approach using several datasets at varying levels
of granularity in the categorization of adverse driving conditions. Furthermore, we demonstrate the general-
ization of the proposed approach to similar and unseen domains.
1 INTRODUCTION
Autonomous driving systems perform well under
ideal conditions, as they are typically trained using
data captured under these conditions. However in the
real-world, data drift occurs, and the model is faced
with adverse conditions such as weather and low illu-
mination. These factors tend to alter the characteris-
tics and visibility of objects, causing a significant drop
in the model performance. Fine-tuning on the new
distribution will result in overwriting of previously
learned information, resulting in catastrophic forget-
ting (McCloskey and Cohen, 1989). This overwriting
of information stems from the rigidity of neural net-
works. Catastrophic forgetting can be circumvented
with joint training, where the model is trained with
all the encountered data jointly, instead of learning
sequentially. However, this may not be possible due
to data unavailability, storage constraints, computa-
tional and time costs of retraining the entire model
with vast amount of data. Conventionally, domain
a
https://orcid.org/0000-0001-7942-4698
b
https://orcid.org/0000-0001-7055-9254
c
https://orcid.org/0000-0002-5708-6023
Changing Weather and Illumination Conditions
Domain Inference Load Domain Expert Segmented Image
Progressive Semantic Segmentation
Figure 1: Progressive Semantic Segmentation (PSS) con-
tinually learns to handle adverse conditions. Our proposed
approach accommodates to changing weather and illumi-
nation conditions by first inferring the domain and subse-
quently using a domain expert for segmentation.
adaptation (DA) methods are used for adapting to data
drift in the new or target domain. Domain adaptation
often requires source data and focuses primarily on
the performance on the target domain. However, it
is imperative for autonomous systems to constantly
adapt to changing conditions, whilst maintaining per-
formance across all domains. Continual learning (CL)
is a dynamic learning paradigm, that extends a trained
model to the changing data and objectives, while ad-
496
Muralidhara, S., Schuster, R. and Stricker, D.
Domain-Incremental Semantic Segmentation for Autonomous Driving Under Adverse Driving Conditions.
DOI: 10.5220/0013249100003905
In Proceedings of the 14th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2025), pages 496-506
ISBN: 978-989-758-730-6; ISSN: 2184-4313
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

dressing the above challenges. CL is defined under
the constraints of having no access to data from pre-
vious tasks. CL incrementally learns, and avoids the
costs associated with retraining from scratch. CL ad-
dresses catastrophic forgetting and emphasizes per-
formance across all domains. To do so, it tackles the
stability-plasticity dilemma (Mermillod et al., 2013),
a trade-off where the model must be able to learn new
information on the current task, without forgetting
the previously learned information. In this work, we
propose Progressive Semantic Segmentation (PSS), a
CL based approach for continuous learning of adverse
conditions as a problem of domain-incremental learn-
ing (cf . Fig. 1). The main contributions are outlined
as follows:
• PSS is a task-agnostic, architecture-based ap-
proach with a growing collection of domain-
specific models as domain experts for segmenta-
tion under adverse conditions.
• Unlike existing architecture-based DIL methods
that require task-IDs, PSS leverages autoencoders
as task experts to infer the domain and select the
most suitable model during inference.
• We validate the effectiveness of PSS using multi-
ple datasets at varying levels of granularity in cat-
egorizing adverse driving conditions.
• We extend our framework to other computer vi-
sion tasks such as object detection, including a
novel hybrid incremental setting with both vary-
ing input and output distributions.
2 RELATED WORK
2.1 Continual Learning
Continual learning methods can be broadly catego-
rized into: Architecture-, regularization-, and replay-
based methods. Architecture-based approaches incre-
mentally learn by altering the network architecture.
The modifications can be implicit through adaptive
and task-specific weights (Mallya et al., 2018), path
routing (Fernando et al., 2017) or explicit with dy-
namically growing progressive networks (Rusu et al.,
2016). Regularization approaches include penalty
computing which prevents the model from overwrit-
ing parameters important to previous tasks (Kirk-
patrick et al., 2017), and knowledge distillation to
transfer knowledge between tasks. Rehearsal and re-
play are two closely related approaches, which use
samples from previous tasks during training for the
current task. Rehearsal based methods explicitly store
a subset of previous task data, whereas replay uses
generative models (Shin et al., 2017) to sample in-
stances. Each approach is associated with advantages
and limitations, and selecting an approach is depen-
dent on the problem and available resources. PSS is
an architecture-based method that benefits from using
domain-specific models to continuously learn differ-
ent environmental conditions.
2.2 Incremental Semantic Segmentation
Incremental learning in CL can be formulated as three
scenarios: In domain- (DIL) and class-incremental
learning (CIL), the input (domain) or the output distri-
bution (classes) is extended from task to task. While
DIL and CIL are task-agnostic, in task-incremental
learning (TIL), a task-ID is assumed to be known
during inference. MDIL (Garg et al., 2022) is
an architecture-based approach with a shared en-
coder network comprising of universally shared and
domain-specific parameters and domain-specific de-
coders. It requires the task-ID during inference to se-
lect the domain-specific path. In PSS, we alleviate
this requirement and dynamically infer the task-ID.
For image classification, the three types have been in-
vestigated comparatively deeply (Aljundi et al., 2017;
Cai et al., 2022) and research is moving forward
to the more complex task of pixel-wise classifica-
tion, i.e. segmentation (Michieli and Zanuttigh, 2019;
Douillard et al., 2021; Goswami et al., 2023). For
class-incremental semantic segmentation, there ex-
ist diverse methods covering regularization-based ap-
proaches, e.g. ILT (Michieli and Zanuttigh, 2019),
PLOP (Douillard et al., 2021), as well as replay-based
RECALL (Maracani et al., 2021). Kalb et al. (Kalb
et al., 2021) investigate the use of distillation and
replay-based approaches for both DIL and CIL and
observe that distillation is more suited for the former
and replay-based for the latter. Though PSS is de-
signed for DIL, we demonstrate that PSS is also suit-
able for a combined incremental learning of new do-
mains and new classes.
2.3 Adapting to Adverse Conditions
Domain adaptation (DA) methods emphasize the per-
formance on a single target domain disregarding any
previous source domains. CL approaches strive to
preserve the performance of the previous domains
whilst adapting to the new domains. Additionally,
DA relies on source and target domain data, contra-
dicting the assumption in CL that data is available for
a single task at a time. However, strategies for DA
can be used for DIL, if all subsequent domains are
converted to mimic a common domain-specific condi-
Domain-Incremental Semantic Segmentation for Autonomous Driving Under Adverse Driving Conditions
497

Domain Inference
Enc Dec
Autoencoder AE
k
Enc Dec
Segmentation
Model S
k
X
k
Y
k
Training Phase Inference Phase
Train
Add
Train Add
Reconstruction Loss
Domain-Specific Experts
Select
AE
1
AE
2
AE
k
S
1
S
2
Sk
x
y
Figure 2: Overview of the proposed Progressive Semantic Segmentation (PSS). For each task-increment T
k
and the associated
data D
k
= (X
k
, Y
k
), we train a task-specific autoencoder AE
k
using X
k
and a segmentation model S
k
. During inference, the
test image x is reconstructed using autoencoders from all tasks, and the reconstruction losses are computed. The domain is
inferred from the autoencoder with the lowest loss and the image is routed to the corresponding segmentation model.
tion, e.g. by style transfer or light enhancement (Wang
et al., 2022). Style transfer can be used either during
training with the converted dataset or during inference
by converting the adversarial conditions into favor-
able conditions prior to segmentation (Romera et al.,
2019). With PSS, we can avoid any intermediate
transfer, which provides an additional source of error.
Several works (Dai and Van Gool, 2018; Wu et al.,
2021) have proposed to tackle domain gaps through a
sequence of smaller adaptations. Dark model adapta-
tion (Dai and Van Gool, 2018) uses a model trained
on daytime conditions to generate pseudo-labels for
twilight images, which is used for training a model
on nighttime images. DANNet (Wu et al., 2021) addi-
tionally uses an image relighting network to minimize
the intensity distributions between the domains. PSS
is not a DA method, but a CL approach.
3 PROGRESSIVE SEMANTIC
SEGMENTATION
In a continual learning setting, the set of tasks T
arrives sequentially in increments T
1
, T
2
, ..., T
n
. Each
task consists of a set of images X and the correspond-
ing pixel-level ground truth Y , with C number of
classes. The increments between tasks can vary in
terms of the input or output distribution (Kalb et al.,
2021). This work corresponds to DIL where new in-
put distributions are added sequentially representing
the changing adverse conditions. The set of classes C
remains the same across all the domains. Inspired by
progressive neural networks (Rusu et al., 2016), our
idea is to instantiate one domain-specific model per
Algorithm 1: Progressive Semantic Segmentation.
Require: Collection of task experts (TE) and domain
experts (DE). if k = 0 initialize TE and DE to [].
Training Phase
Input: Task T
k
from set of incrementally added
tasks T
n
and the associated data D
k
= (X
k
, Y
k
).
Train autoencoder AE
k
on X
k
and append to TE.
Train segmentation model S
k
on D
k
and append to
DE.
Inference Phase
Input: Test image x from unknown domain.
Initialize reconstruction losses (RL) = []
for each AE
i
in TE do
Reconstruct x using AE
i
, compute the recon-
struction loss and append to RL
end for
Domain Inference: domain = index(min(RL))
Select Model: domainExpert = DE[domain]
Segment Image: y = domainExpert(x)
task. However, to transfer this task-incremental set-
ting into a task-agnostic one, we need to dynamically
infer the domain. We address this issue using a collec-
tion of autoencoders (AEs) similar to (Aljundi et al.,
2017). We call the set of AEs task experts and the set
of segmentation models domain experts. An overview
of our proposed approach (PSS) is presented in Fig. 2.
Algorithm 1 explains the training and inference
sequence for a given task T
k
. For each task, we train
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
498

an AE with the associated RGB images. During in-
ference, the test image passes through each AE and
the corresponding reconstruction loss is calculated.
The domain corresponding to the task-expert with the
lowest reconstruction loss is inferred and the image
is routed to the associated domain expert. The set of
very light-weight AEs can grow dynamically and al-
lows for fast estimation of the domain. Since each
autoencoder is trained independently on individual
tasks, the continual introduction of new tasks does
not affect any of the previous models, thus typical
challenges in CL do not affect the AEs. This is a
big advantage of the collection of AEs, compared to
e.g. a single domain classifier that needs to learn con-
tinuously. Our approach of using small-scale AEs is
scalable, avoids retraining, and does not require addi-
tional CL methods to mitigate forgetting.
3.1 Autoencoders for Domain Inference
Autoencoders are primarily used for reconstruction
tasks, where the goal is to reconstruct the input data
from the compressed representation. They consist of
two components: An encoder network which maps
the input data to a low-dimensional representation and
a decoder network for mapping it back to the input
space. We use AEs to infer the domain during in-
ference based on the reconstruction loss. The recon-
struction loss is a measure of the difference between
the original input and the reconstructed output. We
use a simple convolutional AE with a four layers deep
encoder and decoder as shown in Fig. 3. Our activa-
tion function is a ReLU and the final layer is activated
by a Sigmoid function. In the encoder, each convolu-
tion layer has a kernel size of 3 and applies padding,
followed by a 2 × 2 max-pooling layer with stride 2.
The decoder consists of transposed convolutions, ex-
clusively. Their kernel size is 2 × 2 with a stride of
2. This model is very small, containing just 0.035M
parameters, and has a size of ∼ 142 KiB.
It is important to note, that the proposed PSS is not
very sensitive to the design of the AE. The architec-
ture can almost be arbitrarily small. Neither the size
nor shape of the latent space matters. Also, the quality
of the reconstruction is not of primary interest, as long
as the reconstruction loss can be reduced sufficiently.
Due to the rigidity of neural networks, any shift in
the domain will result in a worse reconstruction com-
pared to samples from the original distribution. This
builds the basis for a decision boundary when infer-
ring the domain.
8
conv1
pool
16
conv2
pool
32
conv3
pool
64
conv4
pool
32
tconv1
16
tconv2
8
tconv3
3
tconv4
Figure 3: Proposed autoencoder architecture with four-layer
deep encoder and decoder. Domain inference is based on
the difference between reconstructed and input image.
3.2 Domain Experts
Semantic segmentation involves assigning a semantic
label to each pixel in the image and thereby segment-
ing an image into object regions. In our work, we use
DeepLabV3 (Chen et al., 2017) based on an encoder-
decoder architecture with atrous spatial pyramid pool-
ing (ASPP) module. The ASPP module with dilated
convolutions leverages multi-scale context informa-
tion. A ResNet-101 (He et al., 2016) pre-trained on
ImageNet (Deng et al., 2009) is our backbone. More
specifically, we use the ResNetV1c variant of ResNet
where the 7x7 conv in the input stem is replaced with
three 3x3 convs. Again, we highlight that PSS has no
dependency on the specific segmentation model used.
The architecture of the domain experts can easily be
replaced by e.g. a more efficient or powerful network.
In fact, within our framework, the task itself can be re-
placed. We demonstrate this in our experiments (see
Sec. 4.9) by performing Progressive Object Detection
(POD) under adverse conditions.
4 EXPERIMENTS AND RESULTS
In this section, we present the results of our ap-
proach in DIL of adverse conditions. Progressive
Semantic Segmentation (PSS) is primarily compared
against three baselines: The single-task (ST) baseline,
in which individual models are trained on each do-
main. The evaluation protocol for this baseline as-
sumes availability of the task-ID similar to TIL. The
fine-tuning (FT) baseline, i.e. a single model is trained
sequentially on the individual domains. The high-
est amount of forgetting is assumed in this scenario.
The joint training (JT) model, which has been trained
with all the data of all incremental steps at once. This
model serves as a theoretical upper limit, as the avail-
ability of all data is restricted in CL.
The results are presented in terms of mean
Intersection-over-Union (mIoU), calculated as the av-
erage of IoU values across all classes. The IoU is
Domain-Incremental Semantic Segmentation for Autonomous Driving Under Adverse Driving Conditions
499

the ratio of the area of overlap to the area of union be-
tween the predicted and ground truth segmentation. In
our experiments, we assess the amount of knowledge
of a model compared to the single-task baseline. The
information gained is highlighted in blue, information
lost in red, and the information not learned, because
of too high stability, is highlighted in gray. Our ex-
periments cover a wide range of datasets, even some
that have not been used for training. Furthermore, we
evaluate the capabilities of the AEs as domain classi-
fiers and compare PSS to previous work.
4.1 Datasets
We evaluate our approach using several datasets of
varying conditions and at different levels of granu-
larity. Some of the datasets are used exclusively for
testing to highlight the generalization of the proposed
approach to new, unseen domains as in a real-world
setting. The datasets used are described as follows.
• Cityscapes (CS) (Cordts et al., 2016) is a widely
used autonomous driving dataset consisting of
2975 training and 500 validation images captured
during ideal daytime conditions from different
cities. It comprises 19 semantic classes.
• Adverse Conditions Dataset with Correspon-
dences (ACDC) (Sakaridis et al., 2021) consists
of 1600 training and 406 validation images cap-
tured under conditions such as night, snow, rain,
and fog. ACDC shares the label space of CS.
• SHIFT (Sun et al., 2022) is a large synthetic driv-
ing dataset consisting of 22 classes. We split the
data into five non-overlapping categories of day,
night (under clear conditions), rain, fog, and over-
cast (under daytime conditions).
• Dark Zurich (Sakaridis et al., 2019) and Night-
time Driving (Dai and Van Gool, 2018) consists
of images captured in the dark. We use the labeled
test set for the evaluation of our approach in un-
seen domains. Both datasets consist of the same
19 classes of CS.
• Indian Driving Dataset (IDD) (Varma et al.,
2019) is recorded in less structured (crowded) en-
vironments and has a larger label space of 26
classes. As opposed to the label space of CS, IDD
introduces several new classes while also making
further distinctions in the classification of CS.
4.2 Training
The AEs are trained on a single GPU using a batch
size of 8 and Adam optimizer with a learning rate of
0.001. As reconstruction loss, we minimize the mean
Figure 4: Classification results for domain inference. Left:
SHIFT treats each adversarial condition as a separate do-
main, resulting in a multi-class classification. Right: Real
vs synthetic data both representing daytime conditions, adds
complexity to classification.
squared error (MSE) during training and we train each
AE until the loss reaches below a satisfactory thresh-
old, in our case 0.002. We do not augment or pre-
process the images in any way to best capture the na-
ture of every domain. For training of the segmenta-
tion model, we follow two training schemes in our ex-
periments. The first is the official implementation of
PLOP (Douillard et al., 2021) and is used for the ex-
periments on CS and ACDC in Sec. 4.4. The second
is the more advanced pipeline of MMSegmentation
(Contributors, 2020), used for all other experiments.
4.3 Domain Inference
As discussed previously, we use the reconstruction
by the task-experts as the basis for determining the
domain. This approach as opposed to using a do-
main classifier circumvents the need for further CL
interventions when learning a new task. We observe
that when using a classifier for learning a single class
representing the current domain, the model begins to
overfit immediately. When this overfitted model is
subsequently trained on the next domain, it demon-
strates a similar pattern of overfitting for that partic-
ular class and completely fails in predicting the pre-
vious class. In contrast, our approach considers each
domain independently and ensures there is no inter-
ference and overwriting of information from the pre-
vious tasks. Additionally, standard classifiers tend to
have significantly larger sizes compared to AEs, im-
posing additional memory constraints. Interestingly,
we achieve an accuracy of 100 % for the classifica-
tion between CS and ACDC, and therefore PSS will
achieve results on par with the single-task baseline.
For SHIFT data, the multi-class classification is more
challenging, yet we achieve an accuracy of 77 % and
the results are presented in Fig. 4. In Sec. 4.6 we
show that, despite the lower accuracy, the segmenta-
tion results improve over the single-task baseline for
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
500

Table 1: Results on real-world data with a coarse distinction
between ideal and adverse conditions. All models are first
trained on the initial task (CS) and then on the adverse do-
main (ACDC). Our proposed approach alleviates forgetting
completely and is close to the upper bound.
Method CS ACDC Avg.
Single Task 61.53 59.53 –
Fine-Tuning 41.60 (-19.93) 61.80 (+02.27) 51.70
ILT 37.62 (-23.91) 36.24 (-23.29) 36.93
Replay 29.94 (-31.59) 59.65 (+00.12) 44.79
PSS (Ours) 61.53 (+00.00) 59.53 (+00.00) 60.53
Joint Training 61.98 (+00.45) 61.36 (+01.83) 61.67
a few domains. This can be attributed to a selection
of the most appropriate domain expert regardless of
the true domain label. To further affirm the effective-
ness of domain inference with AEs, we conduct an
experiment with real and synthetic data using CS and
SHIFT, both representing daytime conditions. De-
spite their similarities, our approach accurately dis-
tinguishes between them, as shown in Fig. 4, high-
lighting AE’s capability to capture underlying fea-
tures across domains, discerning subtle differences.
4.4 Comparison on Real-World Data
ACDC and CS are captured in real-world settings and
together provide the basis for our first set of exper-
iments. We treat the entire ACDC dataset as a sin-
gle class of adverse conditions (nighttime, snow, rain,
and fog), while CS represents the ideal conditions.
This results in a coarse distinction between ideal and
adverse conditions. We use this setting for most of
our comparisons against other methods and some ad-
ditional experiments. The results are presented in
Tab. 1. We quantify the catastrophic forgetting as-
sociated with FT. In case of JT, there is a minuscule
improvement over the individual models, due to the
more diverse training data. With our approach, we ob-
serve that no knowledge is forgotten, and we achieve
results of the single-task baseline as the AEs route all
samples to their corresponding domain-specific ex-
pert with 100 % accuracy. ILT is a regularization-
based method that freezes the encoder from the pre-
vious step and distillation is used to retain knowledge
from the previously seen tasks. The results in Tab. 1
indicate that ILT alleviates catastrophic forgetting to
a certain degree, but still, a significant amount of in-
formation is lost (too low stability, too high plastic-
ity). Training on the subsequent task subject to a dis-
tillation loss restricts the model from learning to the
fullest, and it does not achieve satisfactory results (too
low plasticity, too high stability). With the increasing
Figure 5: Examples of images for Cityscapes generated
by GANformer (Hudson and Zitnick, 2021) and the cor-
responding pseudo labels using the CS domain expert. The
sample on the left is reasonably accurate, while the right
sample seems unrealistic and provides erroneous labels.
number of tasks, these two problems become ampli-
fied.
For the replay-based approach, we use GAN-
former (Hudson and Zitnick, 2021). We use the
provided pre-trained model which generates high-
resolution images of the size 2048x1024, and we gen-
erate 2975 images for training similar to the size of the
original train set of CS. Subsequently, we generate the
corresponding pseudo-labels using the previous task
model, i.e. the domain expert for CS. During training
on the ACDC, we also replay the generated training
samples. Though the additional training samples help
to obtain a positive forward transfer, the forgetting is
even higher than fine-tuning. This can be attributed to
error propagation of the generated images and labels
as indicated by the visualization in Fig. 5.
The results from the different approaches are vi-
sualized in Fig. 6. For FT and the replay-based ap-
proach, we observe the highest deterioration on the
previous task. In FT, there are no remedial measures
to prevent forgetting and the previously learned in-
formation is overwritten. The replay-based method is
affected by the propagation of erroneously generated
images and the corresponding pseudo labels. ILT ex-
hibits low-quality segmentation results on both tasks.
4.5 Unseen Domains
To highlight the efficacy of our proposed approach,
we evaluate it further on unseen datasets. The em-
phasis here is not on the quantitative results achieved
on these datasets but rather on the generalization of
our approach to unseen data. Dark Zurich and Night-
time Driving, both contain entirely nighttime images,
our pipeline correctly identifies the adversarial do-
main with 100 % accuracy. Thus, all samples are di-
rected to the ACDC expert achieving mIoUs of 50.56
and 55.84 respectively compared to mIoUs of 11.46
and 19.17 by the CS model.
Domain-Incremental Semantic Segmentation for Autonomous Driving Under Adverse Driving Conditions
501
GT
FT
JT
ILT
ReplayPSS (Ours)
CS: Day ACDC: Snow ACDC: Night ACDC: Rain ACDC: Fog
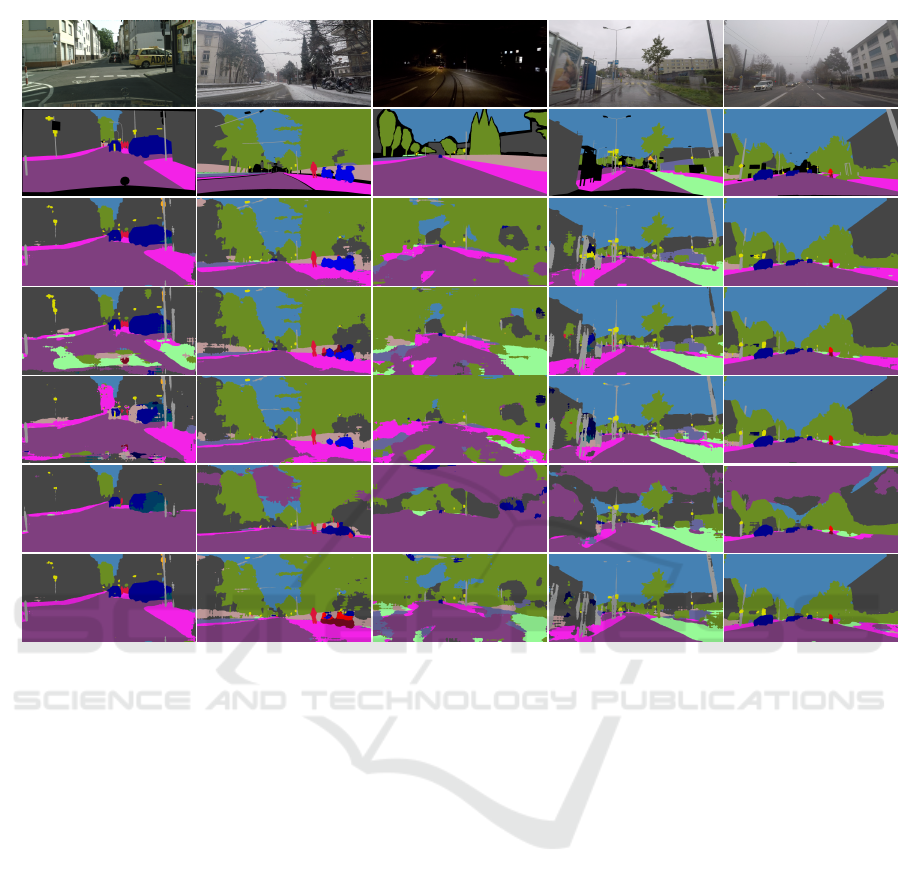
Figure 6: Qualitative visualization of predictions on CS and ACDC. Progressive Semantic Segmentation (PSS) achieves
results of the corresponding single-task models on par with the joint-training (JT) which forms the upper bound.
4.6 Fine-Grained Adversarial Domains
SHIFT is a large dataset, allowing for a fine distinc-
tion between adverse driving conditions. Our setup
consists of one ideal clear daytime domain and four
adverse domains of night, rain, fog, and overcast. The
results on SHIFT are presented in Tab. 2. The JT
model leverages the large amount of data and im-
proves the results across all domains. Intuitively,
the upper bound for PSS should be the correspond-
ing single-model results. However, we observe that
in certain cases our approach improves over the cor-
responding baseline. This is due to the routing by
the task-experts, which determine the most suitable
model regardless of the samples’ original domain. We
can notice the invariance of PSS to the extent of the
domain gap. For large gaps, the classification works
nearly perfectly. For small gaps where domains con-
verge, the domain expert processing the sample be-
comes irrelevant.
The results of the fine-grained adversarial do-
mains from SHIFT are presented in Fig. 7. For the
fine-tuning approach (FT), we can observe the per-
formance increasingly worsen along the sequence of
tasks. The information lost is the highest in the case of
significantly different domains such as night, which
introduces domain-specific characteristics for a few
classes and challenging conditions. Our PSS achieves
results comparable to single-task domain experts and
even improves for a few domains.
4.7 Runtime Analysis
In our pipeline, prior to segmentation, the domain is
inferred through reconstruction by the collection of
AEs, and the corresponding domain expert is selected.
We acknowledge the overhead of this architecture-
based incremental learning approach. Therefore, we
delve into the specifics of the computational costs
for reconstructing the images and inferring the do-
main. To evaluate our runtime performance, we com-
pare it to direct inference, which resembles the task-
incremental learning in the single-task baseline where
the task-ID is explicitly provided. Direct inference
also encompasses all other approaches that use a sin-
gle model and do not require domain inference before
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
502

Table 2: Results on SHIFT with a finer distinction between ideal and adverse driving conditions. Our proposed approach
almost reaches the theoretical upper limit of joint training.
Method Day Night Fog Rain Overcast Avg.
Single Task 83.56 77.77 78.53 84.10 83.57 –
Fine-Tuning 74.77 (-08.79) 29.48 (-48.29) 55.87 (-22.66) 72.62 (-11.48) 84.19 (+00.62) 63.38
PSS (Ours) 83.33 (-00.23) 77.77 (+00.00) 79.42 (+00.89) 83.44 (-00.66) 83.70 (+00.13) 81.53
Joint Training 84.15 (+00.59) 78.43 (+00.66) 81.07 (+02.54) 84.63 (+00.53) 84.52 (+00.95) 82.56
Day Night Fog Rain Overcast
GT
PSS (Ours)
FT
JT
Figure 7: Qualitative visualization of segmentation masks on SHIFT (Sun et al., 2022). Each adversarial condition is consid-
ered individually resulting in a total of five domains. Our proposed Progressive Semantic Segmentation (PSS) achieves results
that are qualitatively on par with the jointly trained model (JT) and very close to the ground truth (GT).
segmentation. This category includes baseline meth-
ods such as joint training, fine-tuning, as well as tech-
niques based on regularization (Michieli and Zanut-
tigh, 2019) and replay (Hudson and Zitnick, 2021).
We use a single NVIDIA A100 GPU for inference
and report the average runtime for different datasets
in Fig. 8. We report that for the coarse distinction
between CS and ACDC, the computational overhead
is 3 ms, whereas the distinction within SHIFT cate-
gories involves reconstruction by 5 task-experts and
the overhead is 5.6 ms.
4.8 Hybrid Incremental Learning
Domain-incremental learning learns from domains
with different input distributions under the constraint
that the set of classes remains consistent. In class-
incremental learning, the input distribution remains
the same and non-overlapping classes are added. A
non-incremental shift in the output space curtails the
use of existing CL approaches and even the joint train-
ing becomes more challenging. When new domains
are added which may have overlapping classes, a con-
flict arises. For instance, the previously seen vehicle
class may have further distinction into cars, buses, and
domain-specific classes such as auto-rickshaws. Our
proposed approach is devoid of these limitations and
is able to handle both varying input and output distri-
butions with different and overlapping classes.
To demonstrate this hybrid incremental learning,
we use CS and IDD. The joint training on both do-
mains, requires a mapping of classes into a common
Domain-Incremental Semantic Segmentation for Autonomous Driving Under Adverse Driving Conditions
503
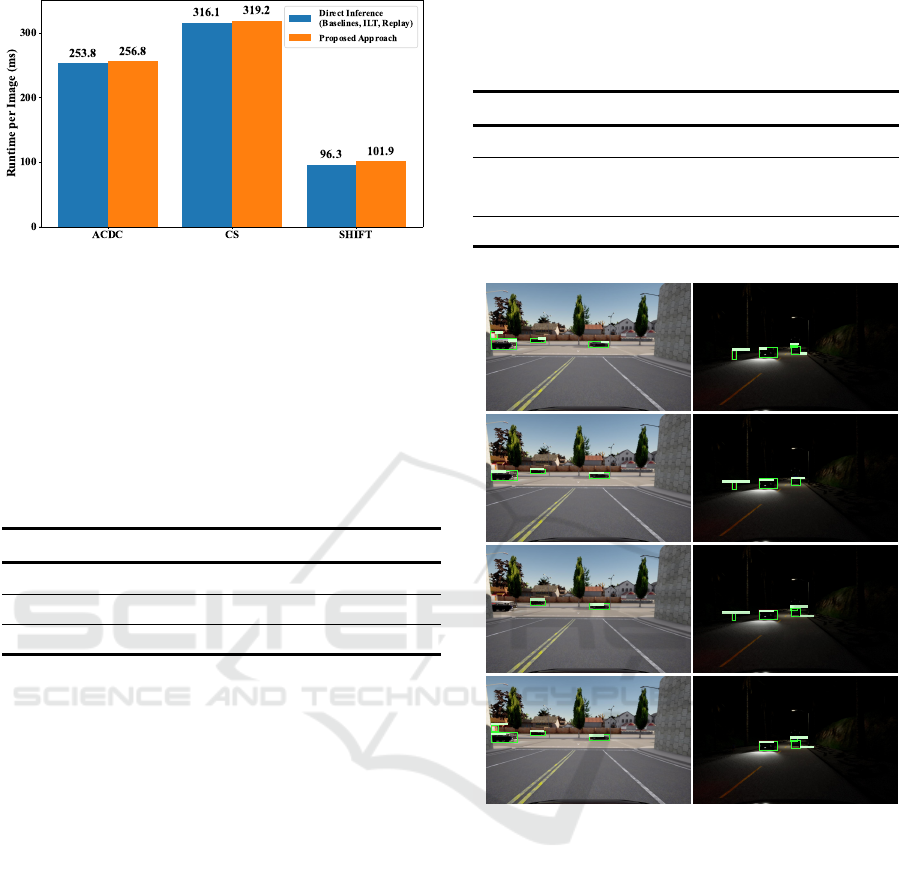
Figure 8: Computational overhead of PSS vs. direct infer-
ence. A minuscule increase in inference time of 3-6 ms is
incurred for the reconstruction of the domain and routing to
the domain expert. The direct inference refers to all other
methods that do not involve domain inference prior to seg-
mentation, including the baselines, as well as replay, and
regularization-based methods.
Table 3: Results on the hybrid incremental learning ap-
proach with both varying input and output distributions.
The joint model is trained and evaluated on the 19 classes
from CS. The single-task model and our approach is evalu-
ated on 19 classes for CS and 26 classes for IDD.
Method CS IDD
Single Task 80.55 72.91
PSS (Ours) 80.22 (-00.33) 71.75 (-01.16)
Joint Training 81.53 (+00.98) 82.53*
*Evaluated on 19 instead of 26 classes
label space. We map the classes of IDD to the cor-
responding classes of CS, and ignore those that have
no counterpart. As a result, the joint model is always
evaluated on 19 classes only. Table 3 presents the
results. Even in this hybrid setting with overlapping
classes, our PSS achieves results close to the single-
task baseline. From this we infer that it may be ben-
eficial to treat an unconstrained domain with diverse
classes as an adversarial condition, necessitating a do-
main expert.
4.9 Transfer to Object Detection
Our proposed approach of using AEs to dynami-
cally identify the task during inference can be im-
plemented across different computer vision tasks. It
resolves the limitation in architecture-based CL ap-
proaches which typically require identifying expert
models (Rusu et al., 2016) or dedicated heads (Garg
et al., 2022) or domain-specific statistics (Mirza et al.,
2022) for routing of the test image. In this exper-
iment, we highlight this generalizability by apply-
ing our progressive approach to object detection, for
which catastrophic forgetting is severe (Witte et al.,
Table 4: Results in mAP for Progressive Object Detection
(POD) on the day and nighttime conditions of SHIFT. Our
approach can be directly integrated into any pipeline repur-
posing single-task models as domain experts.
Method Day Night
Single Task 36.23 33.77
Fine-Tuning 28.76 (-07.47) 35.29 (+01.52)
POD (Ours) 36.15 (-00.08) 33.77 (+00.00)
Joint Training 36.41 (+00.18) 34.24 (+00.47)
bus
truck
car
car
car|1.00
car|1.00
bus|1.00
car|1.00
car|0.56
bus
truck
car
car
POD (Ours)
car|1.00
car|1.00
bus|1.00
truck|0.52
FT
JT
GT
Day
car
pedestrian
truck
car
car|1.00
pedestrian|0.95
car|1.00
car|1.00
pedestrian|0.99
truck|0.53
car|1.00
car|1.00
truck|0.41
car|1.00
Night
Figure 9: Domain-incremental learning for object detec-
tion by Progressive Object Detection (POD) on the SHIFT
dataset (Sun et al., 2022).
2023). For this, we consider two domains namely the
day and nighttime conditions of SHIFT. The pipeline
is similar to the one illustrated in Fig. 2, with the ex-
ception that the segmentation networks S
k
are sub-
stituted by object detection models. We use Faster-
RCNN (Ren et al., 2015) with ResNet-101 as the
backbone and the results in mean average precision
(mAP) are compared against the single-task, fine-
tuned, and jointly trained models and presented in
Tab. 4. Through this, we would like to reiterate the
versatility of our approach which can be directly in-
tegrated for incremental learning without the need for
retraining with regularization or training of genera-
tive models. The results are presented in Fig. 9 and
we once again observe the highest forgetting in fine-
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
504

tuning (FT). In the domain inference, the task experts
achieve nearly 100% accuracy in distinguishing be-
tween the two domains and our approach, Progressive
Object Detection (POD), mitigates forgetting and pro-
duces reasonable results on the second domain.
5 LIMITATIONS
A common criticism and limitation associated with
architecture-based methods, where the number of
models increases linearly with the number of
tasks/domains, is scalability. The individual mod-
els that are leveraged as domain experts in our work
cannot be extended indefinitely for practical rea-
sons. However, we believe that for reasonable num-
ber of domains, architecture-based methods are fea-
sible. Similarly, the inference time increases linearly
with the number of domains. Our analysis in Sec. 4.7
shows that there must be hundreds of domains before
the overhead reaches the time complexity of the seg-
mentation model. At the same time, scalability is not
only an issue with architecture-based methods. Other
approaches such as replay-based methods, may re-
quire training and maintaining a generative model for
every task. Lastly, our work is focused on the domain
gap between varying weather and illumination condi-
tions. However, there are many other dimensions with
respect to domain-specific environmental conditions.
Covering all possible aspects can result in a combina-
torial explosion of domain experts.
6 CONCLUSION
Progressive Semantic Segmentation (PSS) addresses
the problem of continuous adaptation to changing en-
vironments for autonomous driving systems from the
perspective of continual learning. It employs a dy-
namically growing collection of domain experts, each
of which is trained on an individual domain. This
approach mitigates forgetting to a great extent. To
make PSS task-agnostic, we use a collection of task
experts to dynamically infer the domain during infer-
ence. Our experiments demonstrate superior perfor-
mance in comparison to previous domain-incremental
methods and highlight the flexibility of PSS in un-
seen domains, in hybrid incremental scenarios, and
for other vision tasks like object detection. In future
work, we would like to combine PSS with domain
adaptation techniques to better exploit the knowledge
of previous models for new tasks.
ACKNOWLEDGEMENTS
This work was partially funded by the Federal Min-
istry of Education and Research Germany under
the projects DECODE (01IW21001) and COPPER
(01IW24009).
REFERENCES
Aljundi, R., Chakravarty, P., and Tuytelaars, T. (2017). Ex-
pert gate: Lifelong learning with a network of experts.
In CVPR.
Cai, C., Liu, J., Yu, W., and Guo, Y. (2022). Clue: Consoli-
dating learned and undergoing experience in domain-
incremental classification. In ACCV.
Chen, L.-C., Papandreou, G., Schroff, F., and Adam, H.
(2017). Rethinking atrous convolution for semantic
image segmentation. arXiv.
Contributors, M. (2020). MMSegmentation: Openmmlab
semantic segmentation toolbox and benchmark. https:
//github.com/open-mmlab/mmsegmentation.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In CVPR.
Dai, D. and Van Gool, L. (2018). Dark model adaptation:
Semantic image segmentation from daytime to night-
time. In ITSC.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In CVPR.
Douillard, A., Chen, Y., Dapogny, A., and Cord, M. (2021).
Plop: Learning without forgetting for continual se-
mantic segmentation. In CVPR.
Fernando, C., Banarse, D., Blundell, C., Zwols, Y., Ha, D.,
Rusu, A. A., Pritzel, A., and Wierstra, D. (2017). Path-
net: Evolution channels gradient descent in super neu-
ral networks. arXiv.
Garg, P., Saluja, R., Balasubramanian, V. N., Arora, C.,
Subramanian, A., and Jawahar, C. (2022). Multi-
domain incremental learning for semantic segmenta-
tion. In WACV.
Goswami, D., Schuster, R., van de Weijer, J., and Stricker,
D. (2023). Attribution-aware weight transfer: A
warm-start initialization for class-incremental seman-
tic segmentation. In WACV.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In CVPR.
Hudson, D. A. and Zitnick, C. L. (2021). Generative adver-
sarial transformers. ICML.
Kalb, T., Roschani, M., Ruf, M., and Beyerer, J. (2021).
Continual learning for class-and domain-incremental
semantic segmentation. In IEEE IV Symposium.
Kirkpatrick, J., Pascanu, R., Rabinowitz, N., Veness, J.,
Desjardins, G., Rusu, A. A., Milan, K., Quan, J.,
Ramalho, T., Grabska-Barwinska, A., et al. (2017).
Domain-Incremental Semantic Segmentation for Autonomous Driving Under Adverse Driving Conditions
505

Overcoming catastrophic forgetting in neural net-
works. Proceedings of the national academy of sci-
ences.
Mallya, A., Davis, D., and Lazebnik, S. (2018). Piggyback:
Adapting a single network to multiple tasks by learn-
ing to mask weights. In ECCV.
Maracani, A., Michieli, U., Toldo, M., and Zanuttigh, P.
(2021). Recall: Replay-based continual learning in
semantic segmentation. In ICCV.
McCloskey, M. and Cohen, N. J. (1989). Catastrophic in-
terference in connectionist networks: The sequential
learning problem. Psychology of Learning and Moti-
vation.
Mermillod, M., Bugaiska, A., and Bonin, P. (2013). The
stability-plasticity dilemma: Investigating the contin-
uum from catastrophic forgetting to age-limited learn-
ing effects.
Michieli, U. and Zanuttigh, P. (2019). Incremental learning
techniques for semantic segmentation. In CVPR-W.
Mirza, M. J., Masana, M., Possegger, H., and Bischof, H.
(2022). An efficient domain-incremental learning ap-
proach to drive in all weather conditions. In CVPR.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In NeurIPS.
Romera, E., Bergasa, L. M., Yang, K., Alvarez, J. M., and
Barea, R. (2019). Bridging the day and night domain
gap for semantic segmentation. In IEEE IV.
Rusu, A. A., Rabinowitz, N. C., Desjardins, G., Soyer,
H., Kirkpatrick, J., Kavukcuoglu, K., Pascanu, R.,
and Hadsell, R. (2016). Progressive neural networks.
arXiv.
Sakaridis, C., Dai, D., and Van Gool, L. (2019). Guided cur-
riculum model adaptation and uncertainty-aware eval-
uation for semantic nighttime image segmentation. In
ICCV.
Sakaridis, C., Dai, D., and Van Gool, L. (2021). ACDC:
The adverse conditions dataset with correspondences
for semantic driving scene understanding. In ICCV.
Shin, H., Lee, J. K., Kim, J., and Kim, J. (2017). Continual
learning with deep generative replay. NeurIPS.
Sun, T., Segu, M., Postels, J., Wang, Y., Van Gool, L.,
Schiele, B., Tombari, F., and Yu, F. (2022). SHIFT:
a synthetic driving dataset for continuous multi-task
domain adaptation. In CVPR.
Varma, G., Subramanian, A., Namboodiri, A., Chandraker,
M., and Jawahar, C. (2019). Idd: A dataset for ex-
ploring problems of autonomous navigation in uncon-
strained environments. In WACV.
Wang, H., Chen, Y., Cai, Y., Chen, L., Li, Y., Sotelo, M. A.,
and Li, Z. (2022). Sfnet-n: An improved sfnet al-
gorithm for semantic segmentation of low-light au-
tonomous driving road scenes. T-ITS.
Witte, C., Schuster, R., Bukhari, S. S., Trampert, P.,
Stricker, D., and Schneider, G. (2023). Severity
of catastrophic forgetting in object detection for au-
tonomous driving. In ICPRAM.
Wu, X., Wu, Z., Guo, H., Ju, L., and Wang, S. (2021). Dan-
net: A one-stage domain adaptation network for unsu-
pervised nighttime semantic segmentation. In CVPR.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
506
