
Online Detection of End of Take and Release
Actions from Egocentric Videos
Alessandro Sebastiano Catinello, Giovanni Maria Farinella and Antonino Furnari
Department of Mathematics and Computer Science, University of Catania, Italy
ale.catinello.c@gmail.com, {giovanni.farinella, antonino.furnari}@unict.it
Keywords:
Online Action Detection, Take/Release Action Detection, Egocentric Untrimmed Video Analysis.
Abstract:
In this work, we tackle the problem of detecting “take” and “release” actions from egocentric videos. We
address the task following a new Online Detection of Action End (ODAE) formulation in which algorithms
have to determine the end of an action in an online fashion. We show that ODAE has advantages over previous
formulations that focus on detecting actions at the contact frame or offline, thanks to the reduced uncertainty
due to the complete observation of events before a prediction is made. We adapt to this task and benchmark
different state-of-the-art temporal online action detection models on the EPIC-KITCHENS dataset, highlight-
ing the specific challenges of the ODAE task, such as sparse annotations and high action density. Analysis on
THUMOS14 shows that most conclusions are valid also in a third-person vision scenario. We also investigate
the impact of techniques such as label propagation to address annotation imbalance. Our results show that the
problem is far from being solved, Mamba-based models consistently outperform transformer-based models in
all settings.
1 INTRODUCTION
Wearable devices observe the world from the user’s
perspective, enabling user-centric applications that
assist in daily tasks (Plizzari et al., 2024). Under-
standing atomic actions such as “take” (picking up
an object) and “release” (putting down an object) is
essential for assistive systems, enabling applications
like action anticipation, object usage tracking, or error
detection during tasks. While related tasks, such as
hand-object interaction detection (Shan et al., 2020;
Darkhalil et al., 2022; Cheng et al., 2023), object-state
change recognition (Grauman et al., 2022; Xue et al.,
2024; Sou
ˇ
cek et al., 2022), temporal action detection
(Zhang et al., 2022; Wang et al., 2021a; Wang et al.,
2021b; Liu et al., 2024), and online action recognition
(Chen et al., 2024; Zhao and Kr
¨
ahenb
¨
uhl, 2022; Wang
et al., 2021c; An et al., 2023), have been explored,
none fully address the requirements for take/release
detection. Specifically, this task should operate at the
video level, in an online fashion, and ensure tempo-
ral consistency by signaling a single action per occur-
rence.
Inspired by the Online Detection of Action Start
(ODAS) task (Shou et al., 2018), we formulate the
detection of take/release actions as an “Online De-
tection of Action End (ODAE)” task, which focuses
Figure 1: Different schemes for the detection of take/release
actions from egocentric videos. Frames marked in blue de-
note the time at which models are requested to predict the
ground truth take action when performing (a) detection of
action start, (b) detection at contact frame, and (c) detection
of action end. Predicting action end times (c) is less am-
biguous than anticipating actions before observing them (a)
or at the contact frame for partial observations (b). For in-
stance in (b) it would be hard to distinguish a “touch” from
a “take” action.
on identifying action completion in egocentric video
streams in real-time. ODAE aims to signal actions
immediately after they conclude, avoiding ambigui-
ties associated with incomplete observations or early
predictions (Scavo et al., 2023). Methods are required
to output one prediction per action, penalizing missed
detections, multiple detections, and overly delayed or
early predictions.
Catinello, A. S., Farinella, G. M. and Furnari, A.
Online Detection of End of Take and Release Actions from Egocentric Videos.
DOI: 10.5220/0013249700003912
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
863-870
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
863

We provide an in-depth investigation of the ODAE
task, benchmarking state-of-the-art temporal action
detection models (Zhang et al., 2022; Zhao and
Kr
¨
ahenb
¨
uhl, 2022) on EPIC-KITCHENS-100 and
THUMOS datasets in both online and offline set-
tings. The study highlights the challenges posed by
sparse ground truth annotations and high action den-
sity in egocentric scenarios. To address these, we
evaluate a label propagation technique to mitigate
annotation imbalance, boosting model performance.
Our findings reveal that the task remains challenging,
with current models showing limited performance. In
summary, our contributions are: 1) Formalizing the
ODAE task, 2) Providing benchmark comparisons of
state-of-the-art methods, and 3) Exploring techniques
like label propagation to adapt models to this sce-
nario.
2 RELATED WORK
Offline Temporal Action Localization. The Tem-
poral Action Localization (TAL) task involves pre-
dicting the onset and offset frames of an action, with
the goal of segmenting the occurrence of actions in
the video in an offline setting in which the video is
completely observed at inference. Several approaches
have been proposed to solve this task (Zhang et al.,
2022; Wang et al., 2021a; Wang et al., 2021b; Liu
et al., 2024). Notably, ActionFormer (Zhang et al.,
2022) adopts a Transformer encoder (Vaswani, 2017),
while ActionMamba (Chen et al., 2024) extends this
framework by incorporating a Mamba encoder (Gu
and Dao, 2023), achieving state-of-the-art perfor-
mance.
The TAL task shares important similarities with
our problem definition, as both aim to detect action
instances. However, a major limitation of TAL ap-
proaches is their reliance on offline processing, which
makes them incompatible with the online constraints
of our approach.
Online Action Detection. Online Action Detection
(OAD) aims to detect the frames associated with an
action as early as possible from partial observations,
ideally before the action is completed (De Geest et al.,
2016). Since the task is performed in an online set-
ting, predictions at time t
′
must be made using only
observations available at time t
′
< t
′′
. Recent ad-
vances in OAD have taken advantage of Transformer-
based architectures (Vaswani, 2017), which are well
suited to handling long sequences of data. In par-
ticular, OadTR (Wang et al., 2021c) is an encoder-
decoder framework built on top of Transformers that
simultaneously encodes historical information and
predicts future context to detect ongoing actions. TeS-
Tra (Zhao and Kr
¨
ahenb
¨
uhl, 2022), another state-of-
the-art model based on transformers, incorporates
both long- and short-term memory to effectively sum-
marize past information for improved prediction.
In addition to transformer-based approaches,
some work has explored alternative architectures that
also yield competitive performance. For example,
MiniRoad (An et al., 2023), a fully RNN-based
model, achieves similar performance to Transformer-
based methods with a smaller memory footprint and
increased inference speed. TeSTra-Mamba (Chen
et al., 2024) extends TeSTra by replacing the Trans-
former encoder with a Mamba-based architecture.
While these models are promising and adaptable
to the OAD task, they require further refinement to re-
liably predict an accurate offset frame, as we show in
this paper. In addition, proper evaluation using appro-
priate metrics is essential to assess their performance
in this context.
Online Detection of Action Start. The Online De-
tection of Action Start (ODAS) task (Shou et al.,
2018) focuses on accurately predicting the frame at
which an action begins in online settings, with an em-
phasis on temporal accuracy. Previous research has
addressed this challenge using various approaches,
such as 3D convolutional networks from a third-
person perspective (Shou et al., 2018), the combi-
nation of LSTMs with reinforcement learning (Gao
et al., 2019), and weakly supervised learning tech-
niques using video-level labels (Gao et al., 2021). In
addition, recent work has relaxed the online constraint
by employing a buffer window to predict the action
start frame in a quasi-online fashion (Scavo et al.,
2023).
While this is very similar to the problem we aim
to address in terms of formulation and evaluation met-
rics, we argue that for most practical applications pre-
dicting the action offset frame is a more practical and
sufficient solution.
Datasets of Egocentric Videos. Datasets of ego-
centric videos (Damen et al., 2022; Grauman et al.,
2022; Li et al., 2018; Sener et al., 2022) have re-
ceived considerable attention in recent years, partic-
ularly in the fields of computer vision and human-
object interaction. These datasets are characterized
by data captured from a first-person perspective, pro-
viding valuable insights into how individuals interact
with their environment and others. The unique per-
spective of egocentric data allows for a more refined
understanding of context and action, making it par-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
864

ticularly useful for studying behavioral patterns and
contextual dynamics. A notable example is the use of
wearable cameras to record daily activities, providing
detailed information about both individual behavior
and environmental context.
In this work, we focus on the Epic-Kitchens 100
(EK100) dataset (Damen et al., 2022), a large-scale
collection of egocentric video footage that captures
a variety of routine kitchen activities. EK100 is a
well-established resource for human-object interac-
tion research because it contains detailed video and
audio recordings of interactions with kitchen uten-
sils and appliances. Importantly, the dataset also in-
cludes complex multitasking scenarios, such as wash-
ing dishes while cooking, that involve parallel goal-
directed actions. These multitasking interactions
present a higher level of difficulty and enrich the ap-
plicability of the dataset for studies of human behav-
ior in dynamic, real-world environments.
For the purposes of our study, we adapted the
EK100 dataset to our task focusing on video segments
representing ”take” and ”release” actions. This allows
us to define a new benchmark for take/release tempo-
ral action detection.
3 PROBLEM DEFINITION AND
EVALUATION METRIC
3.1 Online Detection of Action End
(ODAE) Task Definition
We define the ODAE task as follows: given an in-
put video V observed up to current time t
′
, models
have to determine whether the current frame contains
the end of a take/release action. Predictions are made
online with no access to any frame t
′′
> t
′
when mak-
ing predictions at time t
′
. Let a = (c,t) represents a
ground truth action, where c is the action class and t
is the related action end time-stamp. Each prediction
made by the model in an online setting is represented
as a ˆa = (ˆc,
ˆ
t,s) tuple, where ˆc and
ˆ
t are respectively
the predicted class and key timestamp and s is a con-
fidence score. Ideally, we aim to obtain a set of high-
confidence predictions such as each ˆa = ( ˆc,
ˆ
t,s) pre-
diction is associated to only one ground truth action
a = (c,t).
3.2 Evaluation Protocol
In the context of Temporal Action Localization (TAL)
and Online Action Detection (OAD), models are typ-
ically evaluated using segment-level mean Average
Precision (mAP) (Zhang et al., 2022) and frame-
level mAP metrics (De Geest et al., 2016; Zhao and
Kr
¨
ahenb
¨
uhl, 2022). Frame-level mAP primarily mea-
sures the accuracy of classifying individual frames,
while segment-level mAP focuses on the accuracy of
detecting action segment boundaries. Neither of these
metrics, however, are directly suitable to assess per-
formance in detecting the precise locations of action
starts or ends.
Point Level mAP. To properly evaluate our models,
as outlined in (Shou et al., 2018), we use point-level
detection mean Average Precision (p-mAP), accord-
ing to which a predicted action ˆa = ( ˆc,
ˆ
t,s) is matched
to a ground truth action a = (c,t) if it meets the fol-
lowing criteria:
1. The predicted and ground truth action classes
match (c = ˆc);
2. The temporal offset δ = |
ˆ
t −t| is less than or equal
to a specified evaluation temporal threshold φ.
Predictions are matched to ground truth actions
in a greedy manner, prioritizing those with higher
confidence scores. Each predicted or ground truth
action can be matched to another action only once.
Matched predictions are counted as true positives,
unmatched ground truth actions are counted as false
positives, whereas unmatched predicted actions are
counted as false positives. The mAP value is hence
computed averaging AP values for each class follow-
ing (Caba Heilbron et al., 2015). The final mp-mAP
value is hence defined as the average of p-mAP values
calculated at different temporal offset thresholds φ. In
particular we evaluate in a temporal threshold range
of 1 to 10 seconds with a step of 1 second.
4 COMPARED METHODS
We benchmark the performance of different methods
operating in both offline and online settings. The
following sections describe the main considered ap-
proaches, for which we test and compare different set-
tings in our experimental analysis.
4.1 ActionFormer
ActionFormer is an encoder-decoder architecture de-
signed for offline video action detection, leveraging
a Transformer encoder to encode feature sequences
and a 1D convolutional decoder with classification
and regression heads to predict action classes and
temporal boundaries. As a baseline, ActionFormer
Online Detection of End of Take and Release Actions from Egocentric Videos
865

was trained on the proposed Offline Detection of Ac-
tion Ends (ODAE) and Online Detection of Action
Start (ODAS) tasks to provide an upper-bound per-
formance reference for online methods.
4.2 TeSTra
TeSTra (Temporal Smoothing Transformer) is a
transformer-based model optimized for real-time on-
line action detection and anticipation, incorporating a
novel attention mechanism and temporal smoothing
kernels to capture long- and short-term dynamics effi-
ciently. By leveraging the box kernel, which operates
like a FIFO queue with O(T ) space complexity, TeS-
Tra achieves up to 6x faster processing speeds com-
pared to sliding window transformers, enabling real-
time action prediction without future frame reliance.
4.2.1 Long-Short Memory
In TeSTra, temporal information from video clips is
captured by two different types of memory: long and
short memory. The model uses these memory types to
enhance its ability to process sequential data. Specifi-
cally, the first encoder is used to generate a long mem-
ory embedding, which is then passed to the decoder
along with the more recent frames, allowing the it
to generate the short memory independently. In set-
tings where model efficiency is critical, the role of
long memory deserves careful consideration, as it has
a direct impact on model size.
To evaluate the utility of long memory in TeS-
Tra in our ODAE setting, we conducted experiments
on two datasets with different characteristics: THU-
MOS14 and EPIC-KITCHENS-100. These datasets
differ not only in their nature - THUMOS14 con-
sists of third-person video perspectives and EPIC-
KITCHENS-100 contains egocentric footage - but
also in the duration of the actions depicted. In the
case of THUMOS14, where actions tend to be longer,
long memory may be useful for prediction because it
provides context over longer periods of time. How-
ever, in EPIC-KITCHENS-100, where actions tend to
be shorter and more frequent, long memory appears
to be less useful. We ablate these aspects in our ex-
periments.
4.2.2 Label Propagation
In the Online Detection of Action End (ODAE) task,
data imbalance is a significant challenge, mainly due
to the sparse distribution of action ends in untrimmed
video. In our context, indeed, models are trained con-
sidering the frame marking the end of an action as
a positive sample, while all other frames are labeled
as negative samples. This approach severely affects
the imbalance problem making training dominated by
background samples.
To address this issue, we propose an optimized
training strategy, inspired by the approach proposed
in (Hu et al., 2024), that recognizes the high similarity
between frames that occur just before the end of the
action. Specifically, we extend the labeling process by
including the ∆ frames preceding the true action end
frame as positive samples. This modification aims to
enrich the training data, mitigate the imbalance, and
improve the models ability to localize action bound-
aries.
During training, we propagate the positive label
to a maximum of three frames prior to the ground
truth action end, in addition to the annotated boundary
frame. This strategy provides a compromise that re-
duces the imbalance in the annotation while minimiz-
ing the risk of overfitting to overly long segments, los-
ing the ability to precisely localize action end frames.
Although this approach introduces up to three false
positives during training (i.e., the model may predict
action endings 1-3 frames before the ground truth), in
our experiments it does not negatively affect perfor-
mance during evaluation, as the model is ultimately
evaluated only on the accuracy of its predicted action
end frame.
4.3 TeSTra - Mamba
Over the past years, Mamba (Gu and Dao, 2023) has
emerged as a promising alternative to the Transformer
architecture, offering comparable or superior perfor-
mance while achieving sub-quadratic complexity in
both space and time. In particular, Mamba exploits
parallelization during training and acts like a recur-
rent neural network (RNN) during inference, hence
offering important computational advantages in on-
line scenarios.
Based on the TeSTra-Mamba model presented in
(Chen et al., 2024), we modified the TeSTra archi-
tecture replacing the Transformer decoder responsi-
ble for short-term memory with a standard Mamba
block. Our experiments focused solely on the short-
term memory module, excluding any long-term mem-
ory components, also considering that Mamba should
be able to effectively model observations in a long-
term fashion by design.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
866
5 EXPERIMENTAL SETTINGS
AND RESULTS
5.1 Datasets
We perform experiments on two benchmark datasets:
THUMOS14 (Idrees et al., 2017) and EPIC-
KITCHENS-100 (Damen et al., 2022) following
the same data settings used in TeSTra (Zhao and
Kr
¨
ahenb
¨
uhl, 2022).
EPIC-KITCHENS-100. The EPIC-KITCHENS-
100 dataset contains 100 hours of egocentric video
footage with approximately 90,000 annotated action
segments. The action labels in EK100 are catego-
rized into 97 verb classes and 300 noun classes.
In the EK100 experiments, we ran two main types
of experimental conditions. The first condition,
termed all verbs, required the model to predict
all verbs present in the dataset, in addition to the
corresponding noun. The second condition, termed
take/release only, involved reducing the set of target
verbs to two categories: “take” and “release”. In this
simplified condition, “take” served as a representative
for a number of verbs such as “get”, “fetch”, and
“collect-from”, while “release” represented verbs
such as “put”, “leave-on”, and “place-on”. We used
the original EPIC-KITCHENS-100 annotation where
we treated the “take” class as it is and the “put” class
as our “release”. We evaluated the models ability to
predict both verbs and nouns when working in the all
verbs setting, and only verbs in the take/release only.
THUMOS14. The THUMOS14 dataset consists of
413 unedited videos annotated with 20 action cate-
gories. We train our model on the validation set,
which contains 200 videos, and report performance
on the test set, which contains 213 videos. Although
the THUMOS14 dataset is exocentric in nature, we
used it as a baseline to gain insight into the perfor-
mance of the tested models and the ability of our task
formulation to generalize to the case of third-person
observations.
5.2 Results
5.2.1 Offline Detection with ActionFormer
Table 1 reports the results of the offline ActionFormer
model trained and tested in ODAS and ODAE set-
tings. Results are reported in percentage. We con-
sider both the case of only Take/Release verbs and all
verbs. We note that the ODAE setting brings slightly
Table 1: Offline ActionFormer results in terms of percent-
age of mp-mAP on EK100 for verb prediction, both with
Take/Release only (T/R) and all verbs (All). Best results
are reported in bold.
Task Verbs Verb mp-mAP
ODAS T/R 65.20
ODAE T/R 66.12
ODAS All 25.50
ODAE All 25.70
Table 2: Offline ActionFormer results on THUMOS14 in
terms of percentage of mp-mAP.
Task mp-mAP
ODAS 81.90
ODAE 83.56
better results with an mp-mAP of 66.12 as compared
to the 65.20 of ODAS settings for Take/Release ac-
tions. This suggests that detecting action ends is a
less ambiguous task than detecting action starts even
in offline settings. Performance values are smaller
when all verbs are considered, but they follow a simi-
lar trend, with ODAE performing better than ODAS.
Results in Table 2 show a similar trend on THU-
MOS14, with the ODAE setting bringing better re-
sults than ODAS. Performance measures achieve
larger numbers here due to the simpler nature of the
dataset. This highlights that the proposed ODAE for-
mulation is beneficial also in third-person vision set-
tings, reducing ambiguities in action prediction.
5.2.2 TeSTra
EPIC-KITCHENS-100. Table 3 shows the results
of different model configurations evaluated in ODAE
settings on the EPIC-KITCHENS-100 dataset. We
observe that the L/S (Long and Short term) setting
without label propagation achieves the best overall
performance among models without Mamba layers
in the “all verbs” settings, with an average mp-mAP
of 6.45 and an action mp-mAP of 5.64. This sug-
gests that combining long-term and short-term mem-
ory without label propagation provides a strong base-
line for the “all verbs” task. However, when focus-
ing on specific prediction tasks (verb or noun), alter-
native configurations show superior performance on
individual metrics. For example, using 4-frame label
propagation and short-term memory (S) configuration
achieves the highest verb mp-mAP (6.16) and com-
petitive noun mp-mAP (7.94). Similarly, the using 4-
frame label propagation and long-short memory (L/S)
achieves the best noun mp-mAP (8.14), but with infe-
rior verb performance (4.90). This suggests that label
propagation has different effects depending on the use
Online Detection of End of Take and Release Actions from Egocentric Videos
867
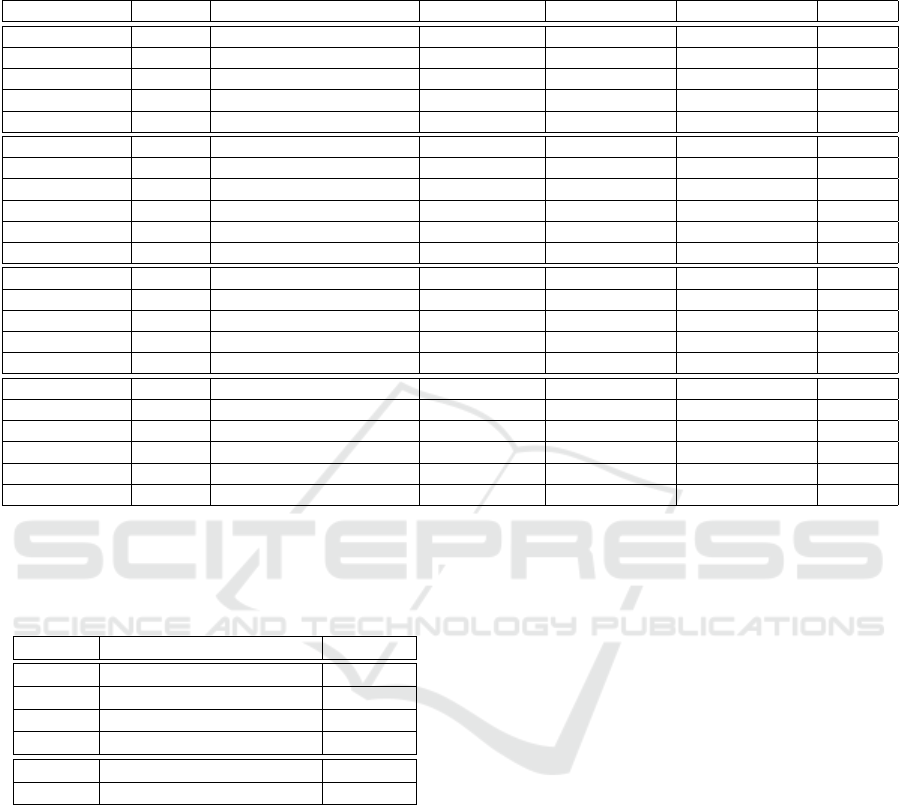
Table 3: Performance of TeSTra and TeSTra - Mamba on EPIC-KITCHENS-100 in various scenarios. In the settings column,
we indicate whether we used Long memory (L), short memory (S) and the number of Mamba Layers (M) in the TeSTra -
Mamba models. Performance are shown as percentage of mp-mAP. Best results are reported in bold.
Action Classes Settings Label propagation (∆ + 1) Verb mp-mAP Noun mp-mAP Action mp-mAP Average
All Verbs L/S NO 5.95 7.76 5.64 6.45
All Verbs L/S 4 Frames 4.90 8.14 5.11 6.05
All Verbs S NO 6.09 7.20 4.88 6.04
All Verbs S 4 Frames 6.16 7.94 4.62 6.24
All Verbs S 2 Frames 5.66 7.37 4.70 5.91
All Verbs S; M:1 NO 7.01 8.05 5.23 6.76
All Verbs S; M:1 4 Frames 7.98 8.63 5.20 7.27
All Verbs S; M:1 2 Frames 7.52 8.64 5.35 7.17
All Verbs S; M:2 NO 8.41 8.66 5.36 7.48
All Verbs S; M:2 4 Frames 7.05 7.82 4.90 6.59
All Verbs S; M:2 2 Frames 6.79 7.70 4.93 6.47
TR L/S NO 20.10 6.39 5.14 10.54
TR L/S 4 Frames 11.40 5.26 3.06 6.57
TR S NO 20.32 8.33 6.09 11.58
TR S 4 Frames 18.31 8.64 5.82 10.92
TR S 2 Frames 18.76 7.58 5.70 10.68
TR S; M:1 NO 24.55 8.97 6.65 13.39
TR S; M:1 4 Frames 21.10 8.02 5.34 11.48
TR S; M:1 2 Frames 20.86 8.59 6.00 11.81
TR S; M:2 NO 25.16 8.06 6.62 13.28
TR S; M:2 4 Frames 24.60 7.91 6.15 12.88
TR S; M:2 2 Frames 19.81 8.05 5.73 11.19
Table 4: TeSTras performance on THUMOS14 in various
scenarios. In the settings column, we indicate the presence
or not of long memory (L), short memory (S) and the num-
ber of Mamba Layers (M). Performance are shown as per-
centage of mp-mAP. Best results are reported in bold.
Settings Label propagation (∆ + 1) mp-mAP
L/S NO 53.75
L/S 4 Frames 37.35
S (1s) NO 37.93
S (1s) 4 Frames 36.77
S; M:2 NO 40.43
S; M:2 4 Frames 42.12
of long and short memory. In particular, label propa-
gation improves verb prediction when only the short
memory is used, while noun prediction is improved
when both long- and short- memory are considered
together with label propagation. In general, not us-
ing label propagation, but using long-short term mem-
ory gives the most balanced results. Adding Mamba
layers improve results with best overall results of
8.41/8.66/5.36/7.48 (Verb, Noun, Action, Average)
obtained with two mamba layers and no label prop-
agation. Label propagation seems to marginally im-
prove performance with a single Mamba layer, while
no label propagation leads to best results when two
Mamba layers are considered. This suggests that the
use of Mamba layers can mitigate the problem of la-
bel sparsity in learning.
We observe similar trends for the “take-release”
setting (second half of the table), with best over-
all results obtained by the Mamba-TeSTra model
with 1 Mamba layer and no label propagation
(24.55/8.97/6.65/13.39), while methods with no
Mamba layers generally achieve lower results. The
reason that the best results were obtained with a single
Mamba layer may be due to the simpler nature of the
task. Verb accuracy in particular greatly benefits from
the Mamba layers. Indeed, the best Mamba-TeSTra
architecture obtains a verb accuracy of 25.16 versus
the 20.32 of the best TesTRa architecture, suggesting
that Mamba enables better temporal modeling of fea-
tures allowing for stronger motion recognition useful
to recognize take and release actions.
THUMOS14. Table 4 shows the performance of the
models on the THUMOS14 dataset. The results show
that the best performing configuration is the model us-
ing long-term and short-term memory and no Mamba
layers, which achieves an mp-mAP of 53.75, versus
42.12 in the best Mamba-TeSTra configuration. It is
worth noting that, while Mamba layers are not helpful
in this dataset, Mamba-TeSTra architectures still out-
perform models using only the short memory. This
suggests that 1) Mamba layers bring added value with
respect to only using short memory, and that 2) the
dataset does not require complex and scalable past
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
868

Table 5: Ablation studies on the contribution of each feature
used.
Used Feature Verb Noun Action Average
RGB 20.08 7.10 5.22 10.08
Optical Flow 25.00 4.29 2.80 10.69
RGB + Optical 24.55 8.97 6.65 13.39
encoding mechanisms such as Mamba, probably due
to THUMOS14 actions being longer and less densely
annotated than the ones in EPIC-KITCHENS. Also
in this case, label propagation seems to bring minor
benefits only in specific settings (e.g., with Mamba-
TeSTra).
5.2.3 Ablation Studies
To deepen our understanding of the task, we con-
ducted ablation studies assessing the specific contri-
butions of each feature type to the overall perfor-
mance. Our models take as input concatenated RGB
and Optical Flow features. The two signals encode
specific properties of the input. For instance, RGB
images encode appearance, whereas Optical Flow en-
codes object motion. To assess the contribution of
optical flow to final performance, we ran three exper-
iments where RGB, Optical Flow and the concatena-
tion of both where used within the overall best per-
forming model on the EPIC-KITCHENS-100 dataset,
which uses two Mamba layers without label propaga-
tion. Experiments are in the “take-release” settings
here. The results are shown in Table 5. We note that
optical flow provides the most critical information for
verb prediction, at the cost of losing some informa-
tion necessary for noun prediction. Best average per-
formance is obtained by using both RGB and optical
flow.
Indeed, using optical flow alone achieves the best
verb prediction performance, outperforming the com-
bination of RGB and optical flow features. Interest-
ingly, while the RGB-only model shows lower verb
performance (4.47 lower mp-mAP) compared to the
RGB + Optical Flow setting, it delivers comparable
noun prediction accuracy (1.87 lower mp-mAP) and
offers significant advantages in inference efficiency
by eliminating the computationally expensive opti-
cal flow calculations. This trade-off highlights the
flexibility of RGB-only models for real-time applica-
tions while showcasing the potential of optical flow
for tasks prioritizing verb recognition accuracy.
6 CONCLUSIONS
This work introduces the Online Detection of Ac-
tion End (ODAE) task, which focuses on real-time
detection of action endpoints, such as ”take” and
”release,” in egocentric video analysis. Using the
EPIC-KITCHENS-100 and THUMOS14 datasets, we
benchmarked state-of-the-art temporal action detec-
tion models, finding that traditional methods strug-
gle with the stringent temporal accuracy and effi-
ciency requirements of ODAE, particularly in dense
action scenarios. Transformer-based models like TeS-
Tra exhibited limitations, while Mamba-based ar-
chitectures showed significant improvements due to
their efficient temporal modeling. Label propagation
techniques were explored to address annotation im-
balances caused by sparse action endpoints, yield-
ing measurable accuracy improvements, especially in
short-memory configurations. Analysis also revealed
that short-term memory and combined RGB-optical
flow features are crucial for capturing the immediate
context of short, rapid actions. This study formal-
izes ODAE, evaluates existing models, and highlights
strategies for improving online action endpoint detec-
tion in challenging scenarios.
ACKNOWLEDGEMENTS
This research has been supported by the
project EXTRA-EYE - PRIN 2022 - CUP
E53D23008280006 - Finanziato dall’Unione Europea
- Next Generation EU, Missione 4 Componente 1
CUP E53D23008280006.
REFERENCES
An, J., Kang, H., Han, S. H., Yang, M.-H., and Kim, S. J.
(2023). Miniroad: Minimal rnn framework for on-
line action detection. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
10341–10350.
Caba Heilbron, F., Escorcia, V., Ghanem, B., and Car-
los Niebles, J. (2015). Activitynet: A large-scale
video benchmark for human activity understanding. In
Proceedings of the ieee conference on computer vision
and pattern recognition, pages 961–970.
Chen, G., Huang, Y., Xu, J., Pei, B., Chen, Z., Li, Z.,
Wang, J., Li, K., Lu, T., and Wang, L. (2024). Video
mamba suite: State space model as a versatile al-
ternative for video understanding. arXiv preprint
arXiv:2403.09626.
Cheng, T., Shan, D., Hassen, A., Higgins, R., and Fouhey,
D. (2023). Towards a richer 2d understanding of hands
at scale. Advances in Neural Information Processing
Systems, 36:30453–30465.
Damen, D., Doughty, H., Farinella, G. M., Furnari, A.,
Kazakos, E., Ma, J., Moltisanti, D., Munro, J., Per-
rett, T., Price, W., et al. (2022). Rescaling egocentric
Online Detection of End of Take and Release Actions from Egocentric Videos
869

vision: Collection, pipeline and challenges for epic-
kitchens-100. International Journal of Computer Vi-
sion, pages 1–23.
Darkhalil, A., Shan, D., Zhu, B., Ma, J., Kar, A., Hig-
gins, R., Fidler, S., Fouhey, D., and Damen, D. (2022).
Epic-kitchens visor benchmark: Video segmentations
and object relations. Advances in Neural Information
Processing Systems, 35:13745–13758.
De Geest, R., Gavves, E., Ghodrati, A., Li, Z., Snoek, C.,
and Tuytelaars, T. (2016). Online action detection. In
Computer Vision–ECCV 2016: 14th European Con-
ference, Amsterdam, The Netherlands, October 11-
14, 2016, Proceedings, Part V 14, pages 269–284.
Springer.
Gao, M., Xu, M., Davis, L. S., Socher, R., and Xiong, C.
(2019). Startnet: Online detection of action start in
untrimmed videos. In Proceedings of the IEEE/CVF
international conference on computer vision, pages
5542–5551.
Gao, M., Zhou, Y., Xu, R., Socher, R., and Xiong, C.
(2021). Woad: Weakly supervised online action de-
tection in untrimmed videos. In Proceedings of the
IEEE/CVF conference on computer vision and pattern
recognition, pages 1915–1923.
Grauman, K., Westbury, A., Byrne, E., Chavis, Z., Furnari,
A., Girdhar, R., Hamburger, J., Jiang, H., Liu, M.,
Liu, X., et al. (2022). Ego4d: Around the world in
3,000 hours of egocentric video. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 18995–19012.
Gu, A. and Dao, T. (2023). Mamba: Linear-time sequence
modeling with selective state spaces. arXiv preprint
arXiv:2312.00752.
Hu, X., Wang, S., Li, M., Li, Y., and Du, S. (2024). Time-
attentive fusion network: An efficient model for on-
line detection of action start. IET Image Processing,
18(7):1892–1902.
Idrees, H., Zamir, A. R., Jiang, Y.-G., Gorban, A., Laptev,
I., Sukthankar, R., and Shah, M. (2017). The thu-
mos challenge on action recognition for videos “in the
wild”. Computer Vision and Image Understanding,
155:1–23.
Li, Y., Liu, M., and Rehg, J. M. (2018). In the eye of be-
holder: Joint learning of gaze and actions in first per-
son video. In Proceedings of the European conference
on computer vision (ECCV), pages 619–635.
Liu, S., Zhang, C.-L., Zhao, C., and Ghanem, B. (2024).
End-to-end temporal action detection with 1b param-
eters across 1000 frames. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 18591–18601.
Plizzari, C., Goletto, G., Furnari, A., Bansal, S., Ragusa, F.,
Farinella, G. M., Damen, D., and Tommasi, T. (2024).
An outlook into the future of egocentric vision. Inter-
national Journal of Computer Vision, pages 1–57.
Scavo, R., Ragusa, F., Farinella, G. M., and Furnari, A.
(2023). Quasi-online detection of take and release ac-
tions from egocentric videos. In International Confer-
ence on Image Analysis and Processing, pages 13–24.
Springer.
Sener, F., Chatterjee, D., Shelepov, D., He, K., Singhania,
D., Wang, R., and Yao, A. (2022). Assembly101: A
large-scale multi-view video dataset for understanding
procedural activities. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 21096–21106.
Shan, D., Geng, J., Shu, M., and Fouhey, D. F. (2020). Un-
derstanding human hands in contact at internet scale.
In Proceedings of the IEEE/CVF conference on com-
puter vision and pattern recognition, pages 9869–
9878.
Shou, Z., Pan, J., Chan, J., Miyazawa, K., Mansour, H.,
Vetro, A., Giro-i Nieto, X., and Chang, S.-F. (2018).
Online detection of action start in untrimmed, stream-
ing videos. In Proceedings of the European confer-
ence on computer vision (ECCV), pages 534–551.
Sou
ˇ
cek, T., Alayrac, J.-B., Miech, A., Laptev, I., and Sivic,
J. (2022). Look for the change: Learning object
states and state-modifying actions from untrimmed
web videos. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 13956–13966.
Vaswani, A. (2017). Attention is all you need. Advances in
Neural Information Processing Systems.
Wang, X., Qing, Z., Huang, Z., Feng, Y., Zhang, S., Jiang,
J., Tang, M., Gao, C., and Sang, N. (2021a). Proposal
relation network for temporal action detection. arXiv
preprint arXiv:2106.11812.
Wang, X., Zhang, S., Qing, Z., Shao, Y., Gao, C., and
Sang, N. (2021b). Self-supervised learning for semi-
supervised temporal action proposal. In CVPR.
Wang, X., Zhang, S., Qing, Z., Shao, Y., Zuo, Z., Gao, C.,
and Sang, N. (2021c). Oadtr: Online action detection
with transformers. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
7565–7575.
Xue, Z., Ashutosh, K., and Grauman, K. (2024). Learning
object state changes in videos: An open-world per-
spective. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
18493–18503.
Zhang, C.-L., Wu, J., and Li, Y. (2022). Actionformer: Lo-
calizing moments of actions with transformers. In Eu-
ropean Conference on Computer Vision, pages 492–
510. Springer.
Zhao, Y. and Kr
¨
ahenb
¨
uhl, P. (2022). Real-time online
video detection with temporal smoothing transform-
ers. In European Conference on Computer Vision,
pages 485–502. Springer.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
870
