
Symmetry Detection and Symmetrization in Cellular Automata
V
´
ıt Gregor and Ivana Kolingerov
´
a
Department of Computer Science, Faculty of Applied Sciences,
University of West Bohemia, Technick
´
a 8, Plze
ˇ
n, Czech Republic
Keywords:
Symmetry, Cellular Automata, Symmetrization.
Abstract:
Symmetry is the important property of many geometric objects. Our work analyzes the symmetry in two-
dimensional objects created using the cellular automata in the context of the initial configurations and rules
of the automata. Symmetry of basic geometric shapes, such as circles, rectangles, and curves, mapped into
the cells of the automaton, is analyzed in this paper. Also, the symmetry of random objects is analyzed.
This paper also describes the method for centroidal symmetry detection and axial symmetry detection in the
cellular automata, and it also brings the approach of using the cellular automata for object symmetrization by
comparing it with objects in the library of symmetrical objects.
1 INTRODUCTION
Symmetry is an important feature of geometric ob-
jects. A symmetrical object is invariant to some geo-
metric transformation. In 2D space, the two simplest
cases are as follows: if the transformation is rotation,
the symmetry is called a centroid symmetry. If the ge-
ometric transformation is reflection, the symmetry is
called an axis symmetry.
Due to the importance of symmetry, many meth-
ods of its detection have been developed for static
data, both for geometric objects and for digitized pic-
tures.
Not so many methods have been developed for
dynamic data, i.e., for the data that changes in time
somehow. In the case of raster representation, a suit-
able tool seems to be a kind of cellular automaton, as
it has dynamics as its core substance. The challenge
is to know in advance whether a given initial config-
uration leads to a symmetric output after a sequence
of steps and which does not. What is more, it is im-
portant to collect knowledge on how to modify some
initial configurations to get a symmetric output. This
can be used for the correction of distorted geometric
shapes, shape editing, or sketch-based modeling.
This paper is the first step in the analysis of cel-
lular automata in the described direction - symme-
try detection and symmetrization in dynamic raster
data. The analysis is done on simple planar geometric
shapes represented in a raster.
In Section 2, previous methods for symmetry de-
tection in dynamic data will be described. Section
3 focuses on describing the proposed cellular au-
tomata symmetry detection and symmetrization meth-
ods. Section 4 provides the results of the experiments.
Section 5 concludes the paper.
2 RELATED WORK
A cellular automaton (CA) is a one-, two-, three-, or
even more-dimensional structure consisting of a reg-
ular grid of cells (Adamatzky, 2010). Each cell can
be in one of a finite set of states (usually only two,
dead or alive). CA develops over time; each cell stays
in the same state or changes according to some rules,
considering its 4- or 8-neighborhood. The most often
used rule is Conaway’s rule (Vayadande et al., 2022):
If the two or three neighbours of the live cell are alive,
the cell will survive in the next iteration. If exactly
three neighbours of the dead cell are alive, the cell
will live in the next iteration. In all other cases, the
cell will die or stay dead in the next iteration.
A CA can be run with many other rules to serve
various purposes. For example, (Rosin, 2006) tried
to find the best rule from a large set of rules to pro-
cess a digital image. CA can be used for image pro-
cessing (Rosin et al., 2014). Although a CA seems
to have a large potential for symmetry detection and
symmetrization, the only method in this area known
to us was proposed in (Javaheri Javid et al., 2014) -
a fast detection algorithm to find symmetry axes us-
Gregor, V. and Kolingerová, I.
Symmetry Detection and Symmetrization in Cellular Automata.
DOI: 10.5220/0013250000003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 317-322
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
317

ing a CA and a swarm intelligence algorithm with a
stochastic diffusion search.
After each iteration of the cellular automata, there
should be detected if the symmetry exists or not.
This can be done with many methods for the process-
ing of the raster data. (Mestetskiy and Zhuravskaya,
2020) use the asymmetry measure computed using the
Fourier descriptor of an object boundary. (Wang et al.,
2015) compare locally affine invariant features based
on edges to detect symmetry.
As for the problem of symmetrization, one ap-
proach for the transition from the asymmetric patterns
to complex symmetric patterns (symmetrization) was
published in (S
´
anchez and Lopez-Ruiz, 2006) and
uses a stochastically coupling the proportion of pairs
of sites located at the equal distance from the centre
of the lattice.
3 THE PROPOSED METHOD
Let us describe the proposed methods for the symme-
try detection and symmetrization of simple objects in
CA. We will consider the central and axis symmetry.
The approach to finding local symmetry will also be
described.
3.1 Symmetry Detection
Let us have some population of live cells in a CA in
some given time of development, which is to be in-
spected for its symmetry. The candidate on the centre
of the central symmetry C is calculated as the mean
position of all live cells. For each point P, a vector
V = P − C is constructed. Then, the opposite vector
V
op
is determined as V
op
= [−V
x
, −V
y
], and the cell in
the position C +V
op
is checked whether it is live. If
not, the point C is not the centre of the central sym-
metry of this cell pair and the algorithm ends. In this
way, all live cells are checked. If an opposite sym-
metric cell is found for all of them, the population is
central symmetric with the centroid C. Cells that were
found as the opposite symmetric cells do not have to
be processed because their opposite cells will always
be one of the already processed cells.
Now, the proposed method of detection of the ax-
ial symmetry will be described. It uses the centroid
C computed in the previous step. Candidate axes,
which pass through the point C, are generated. These
axes are generated with the angle between the hori-
zontal axis and the symmetry axis from 0 to 180 de-
grees with the step 0.1 degree. For each axis and
then for each cell P, the orthogonal line to the axis,
which passes through point P, is computed. Then,
the intersection I of the line and the axis is computed.
After that, the normal vector to the axis is computed
as N = P − I. An opposite vector N
op
is determined
as N
op
= [−N
x
, −N
y
], and if the cell on the position
I + N
op
is not alive, the candidate axis is not the axis
of the symmetry, and the algorithm can jump to the
next axis. If all points meet the condition, the candi-
date axis is the axis of the symmetry.
These methods can be applied to all live cells from
a CA to detect global symmetry. The local symmetry
can also be found using a clustering algorithm, such
as K-means, as the first step. The resulting clusters
can be processed separately by symmetry detection
algorithms.
3.2 Symmetrization
The proposed symmetrization method is based on the
library of symmetrical patterns. This library contains
basic symmetrical objects, such as horizontal and ver-
tical lines, rectangles, and circles of different sizes.
The method is based on the computation of distance
between objects from the library and the current con-
figuration. This distance is computed as the difference
between the live and dead cells in the configuration
and the object from the library.
Before the symmetrization starts, the algorithm
for symmetry detection is applied to verify there is
neither a symmetry centroid nor a symmetry axis. In
each step, the size of the current population is com-
puted as the size of the bounding box of all live cells.
The distances for objects from the library, which have
a similar size with toleration 2 in each dimension, will
be computed. If the minimal size is lower than some
threshold, the current configuration of the CA will be
replaced by the symmetric pattern from the library.
The symmetrization ends when the symmetry detec-
tion algorithm finds some symmetry axis or a centroid
of the central symmetry.
The symmetrization can be done globally on the
whole population or locally on clusters.
4 EXPERIMENTS AND RESULTS
Let us present the experiments with the symmetry de-
tection and the symmetrization method. The method
was developed in the C# programming language, and
the experiments ran on the computer with the Proces-
sor AMD Ryzen 7 7730U (8 cores with simultane-
ous multithreading, 2 GHz, 4.5 GHz turbo) with inte-
grated Radeon graphics and 16 GB RAM. The exper-
iments were processed on the operating system Win-
dows 11 Home.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
318
First, let us concentrate on testing the behaviour of
CA if the initial configuration is symmetric and ran-
dom. Second, the functionality of the developed sym-
metrization method will be verified. Comparison with
other state-of-the-art methods was not made because
the authors of this paper are not aware of any existing
work in this direction.
All experiments will be processed with the cel-
lular automata with the basic rule called Conway’s
Game of Life and with other three rules, selected ac-
cording to the experimental results. Rules, which will
be used for all experiment, are as follows:
1. Conway’s Game of Life: The live cell will be
alive in the next iteration if it has two or three live
neighbors, and the dead cell will be alive in the
next iteration if it has exactly three neighbors. In
other cases, the cell will be dead.
2. The live cell will be alive in the next iteration if it
has two up to four live neighbours, and the dead
cell will be alive in the next iteration if it has three
or four live neighbours. In other cases, the cell
will be dead in the next iteration. This rule leads
to the fast-growing number of live cells.
3. The live cell will be alive in the next iteration if it
has one or two living neighbors, and the dead cell
will be alive in the next iteration if it has exactly
two neighbours. In other cases, the cell will be
dead in the next iteration. This rule leads to the
fast-growing number of live cells in the following
iterations but is slower than the second rule.
4. The live cell will be alive in the next iteration if it
has three or four neighbours, and the dead cell will
be alive in the next iteration if it has exactly four
neighbours. In other cases, the cell will be dead in
the next iteration. This rule leads to the death of
most of the cells in the following iterations.
4.1 Symmetric Initial Configurations
In this experiment, the tested initial configurations
represented simple symmetric objects, such as line
segments, circles, and curves of various sizes. Ex-
periments were executed on many objects; in the fol-
lowing text, only some interesting results will be de-
scribed.
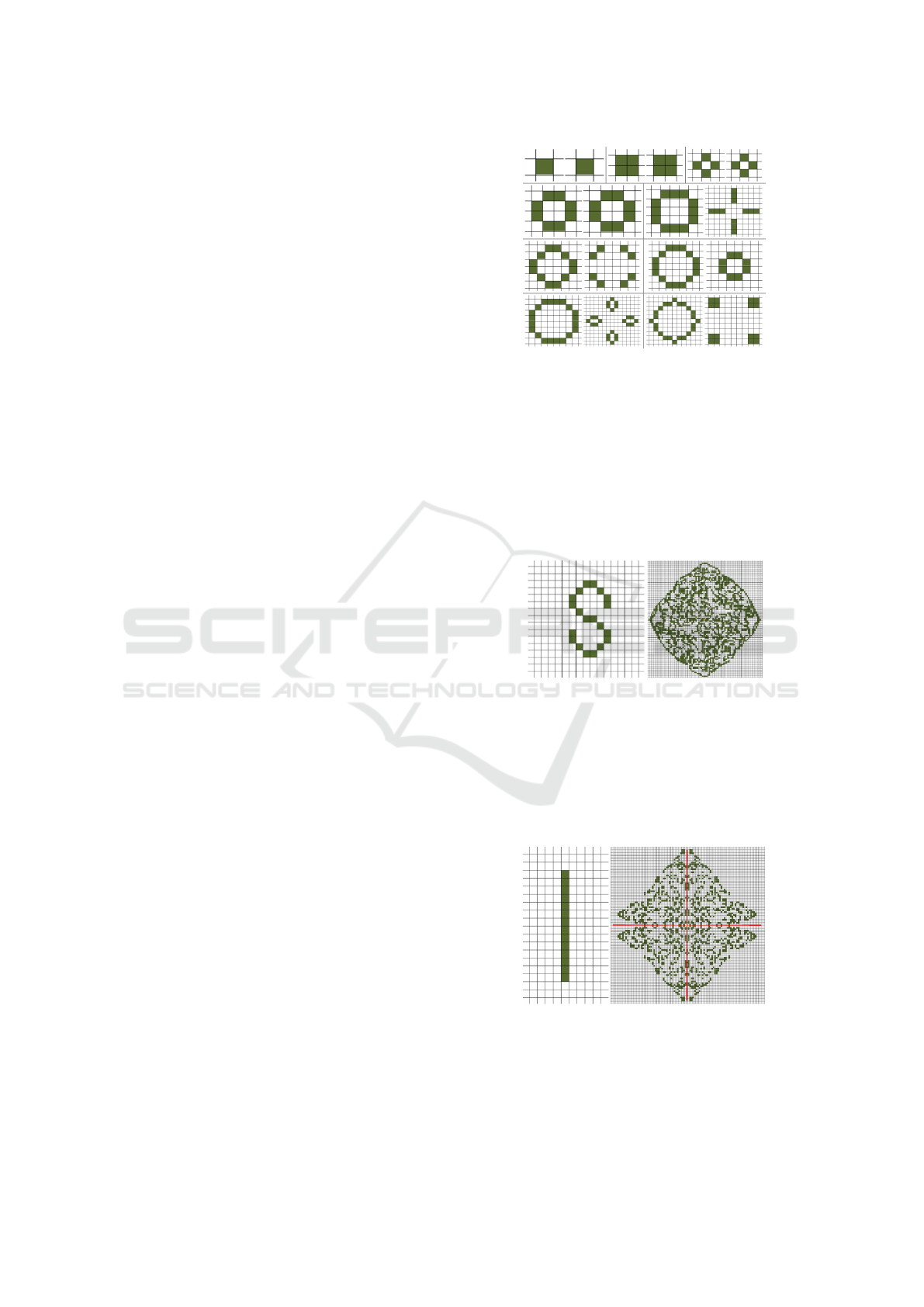
Fig.1 shows nine pairs of images in which the first
image represents a circle of some size, and the second
image represents the stable state in which the circle
converges after some iterations. For these symmetri-
cal circles, all the following iterations were symmetri-
cal, including the stable states. Also, other tested ob-
jects, such as line segments and symmetrical curves,
were symmetrical in all the following populations.
Figure 1: Nine pairs of images representing the circle on the
first position of the pair and the stable state, into which the
CA converges in the second image of the pair.
In Fig.2 on the left, an initial configuration rep-
resenting the letter S is shown; on the right, there is
the central symmetric state after 80 iterations with the
second rule. The other objects were also tested with
the second rule, such as circles and line segments of
various sizes. For these initial configurations, the fol-
lowing iterations were also symmetrical.
Figure 2: Initial configuration representing the letter S and
the state after 80 iterations with the second rule.
The next described initial configuration was a ver-
tical line segment, which can be seen in Fig.3. This
configuration was tested with the third rule, resulting
in symmetric populations in each iteration. Also, for
the third rule, all symmetrical initial configurations
led to symmetry in all iterations.
Figure 3: Initial configuration representing a vertical line
segment and the state after 45 iterations with the third rule.
Let us show the results for the last rule. The ini-
tial configuration can be seen in Fig.4, resulting in a
symmetric stable state after five iterations.
Symmetry Detection and Symmetrization in Cellular Automata
319

Figure 4: Symmetric initial configuration and the stable
state after 5 iterations with the fourth rule.
We can conclude from this group of experiments
that when the initial configuration was symmetric, it
stayed symmetric in all following iterations, but we
have no proof of the general validity of this statement.
4.2 Random Initial Configurations
In this experiment, the tested initial configurations
were random.
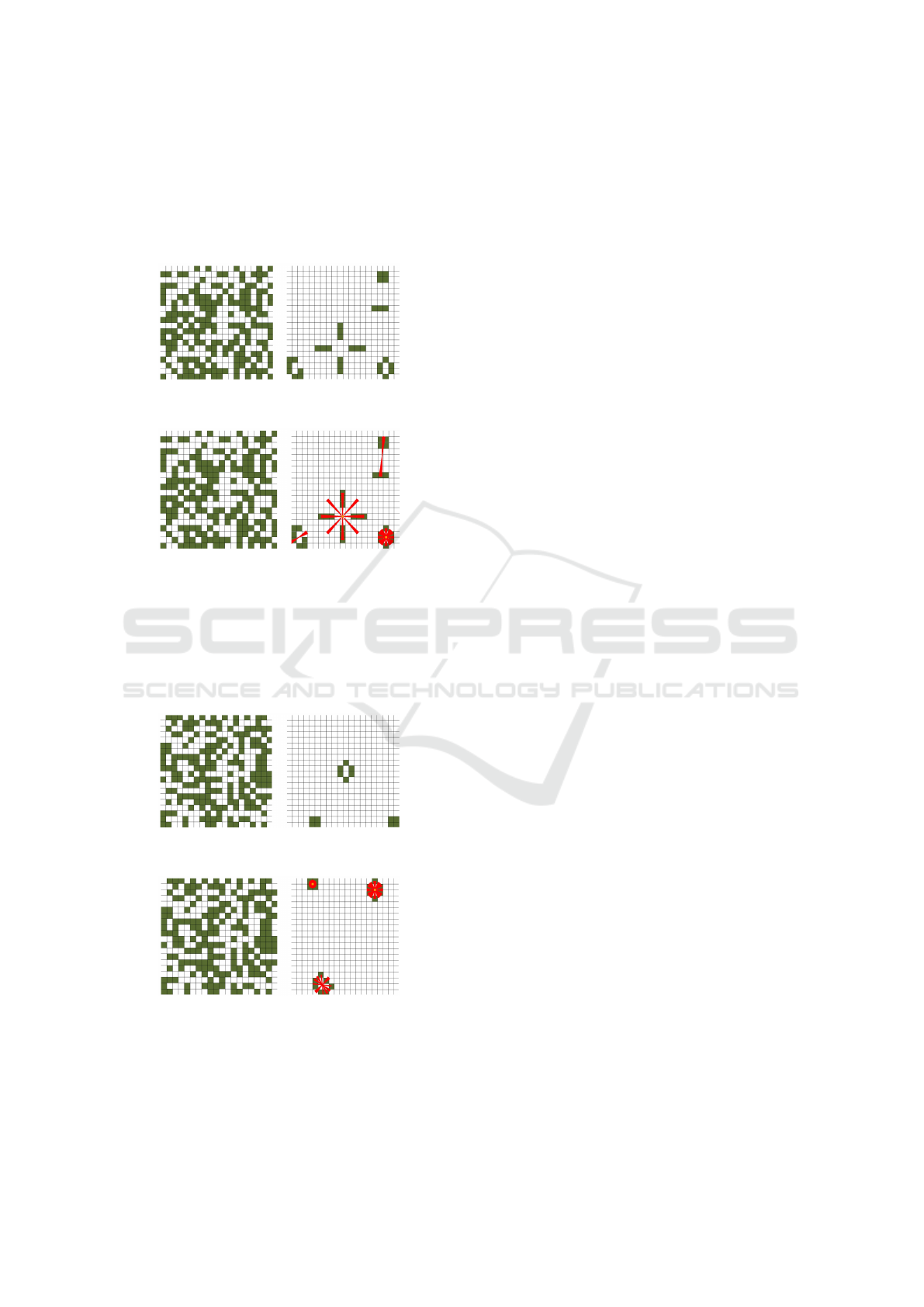
Fig.5 depicts a random initial configuration and
the stable state after 61 iterations with the first rule.
The stable state is not symmetrical, but some struc-
tures have a local symmetry.
Figure 5: Random initial configuration and the stable state
after 61 iterations.
The same initial configuration tested with the sec-
ond rule can be seen in Fig.6. On the right, we can see
the state after 109 iterations, which is not symmetric,
nor does it contain locally symmetric structures.
Figure 6: Random initial configuration and the state after
109 iterations with the second set of rules.
The second random initial configuration was
tested with the third rule, as shown in Fig.7. After
90 iterations (on the right), the population is not sym-
metric, and it does not contain any local symmetric
structures.
For the last rule, two initial random configurations
will be shown. The first one can be seen in Fig.8 on
the left, and, on the right, see the symmetric stable
Figure 7: Random initial configuration and the state after
90 iterations with the third rule.
state after 6 iterations. However, this is a trivial stable
state, a block.
Figure 8: First random initial configuration and the sym-
metric stable state after 6 iterations with the fourth rule.
The second random initial configuration with the
symmetric stable state after 4 iterations can be seen
in Fig.9. Both random configurations with the fourth
rule were finished with the globally symmetric stable
state, a block again.
Figure 9: Second random initial configuration and the sym-
metric stable state after 4 iterations with the fourth rule.
4.3 Almost Symmetric Initial
Configurations
This part of the experiment tests the behavior of sim-
ple symmetric objects with some noisy points.
The first tested initial configuration, which rep-
resents the horizontal line segment with two noisy
points, can be seen in Fig. 10. It resulted in a sym-
metric stable population after 7 iterations with the first
rule, again a block.
The second tested configuration, which represents
the rectangle with three noisy points, did not result
in a globally symmetric population, but there are two
clusters, which are both locally symmetric. This ini-
tial configuration with the stable locally symmetric
state can be seen in Fig.11. It was also tested with
the first rule.
The initial configuration representing the horizon-
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
320

Figure 10: Noisy horizontal line segment and the population
after 7 iterations with the first rule.
Figure 11: Noisy rectangle and the locally symmetric state
after 4 iterations with the first rule.
tal line segment with two noisy points was also tested
with the second rule. It led to the symmetric popula-
tions. In Fig.12 can be seen the symmetric population
after 9 iterations.
Figure 12: Noisy horizontal line segment and the state after
9 iterations with the second rule.
In Fig.13, the initial configuration representing the
rectangle with three noisy points can be seen; it was
tested with the third rule. The population after six iter-
ations can be seen in the right part of the figure. This
rule for the tested object did not lead to a symmetric
configuration.
Figure 13: Noisy rectangle with the state after 6 iterations
with the third rule.
The rectangle was also tested with the fourth rule.
The fourth rule with this object resulted in the death
of all cells, but the last population before death, which
can be seen in Fig. 14, was symmetric.
Figure 14: Noisy rectangle with the symmetric population
after 4 iterations with the fourth rule.
A conclusion from the experiments can be drawn
that the horizontal line segments resulted in symmet-
ric populations in the next iterations. The rectangle
did not usually result in globally symmetric popula-
tions, but sometimes it resulted in locally symmetric
populations.
4.4 Symmetrization
This part of the work focuses on the symmetrization
of non-symmetric configurations. Firstly, the algo-
rithm will be tested on almost symmetric objects and
random configurations.
Fig.15 on the left depicts an object representing a
horizontal line segment with noise, and the resulting
symmetric stable state is on the right. The object was
symmetrized successfully.
Figure 15: Horizontal line segment with two noisy points
with the symmetric state after 7 iterations with the first rule.
In Fig.16, the object representing the hexagon
with three noisy points can be seen. On the right,
the stable symmetric state is shown; here, the sym-
metrization was also successful.
Figure 16: Noisy hexagon with the symmetric population
after 9 iterations with the fourth set of rules.
Fig.17 presents the random initial configuration
and the resulting configuration after 61 iterations.
Global symmetrization was unsuccessful because
Symmetry Detection and Symmetrization in Cellular Automata
321
the resulting stable state is not globally symmetric.
Fig.18 depicts the final symmetric state with the local
symmetrization. It was successful because all clusters
have some symmetry axis or centroid, but the appear-
ance of the stable state is the same as in the previous
Fig. 17.
Figure 17: Random configuration and the stable state after
61 iterations with the first rule.
Figure 18: Random configuration with the stable locally
symmetric population after 61 iterations with the first rule.
In Fig.19, we demonstrate another random initial
configuration with the stable state after 161 iterations.
The global symmetrization was not successful. Fig.20
is the stable locally symmetric state after 99 iterations.
The local symmetrization was successful and brought
a different result than the global symmetrization.
Figure 19: Random configuration and the stable state after
161 iterations with the first rule.
Figure 20: Random configuration with the stable locally
symmetric population after 99 iterations with the first rule.
The conclusion from this part of the experiments
is that when the initial configuration of CA is almost
symmetric, with the simple shape, the symmetriza-
tion works. When the configuration is random, only
the local symmetrization works well, but the global
symmetrization does not.
5 CONCLUSION
This paper made the first steps to analyze the usage
of cellular automata in symmetry detection and sym-
metrization of simple planar geometric shapes rep-
resented in a raster. Two simple algorithms were
proposed and tested with some promising and some
discouraging results. In the future, attention should
be devoted to developing rules that help maintain or
strengthen the symmetry of the configuration.
ACKNOWLEDGEMENTS
This research was supported by the Czech Science
Foundation under the research project 21-08009K;
V.Gregor was also supported by the Ministry of Edu-
cation, Youth and Sports under the Students Research
project SGS-2022-015.
REFERENCES
Adamatzky, A. (2010). Game of Life Cellular Automata.
Springer-Verlag London Limited.
Javaheri Javid, M. A., al Rifaie, M. M., and Zimmer, R.
(2014). Detecting symmetry in cellular automata gen-
erated patterns using swarm intelligence. In Dediu,
A.-H., Lozano, M., and Mart
´
ın-Vide, C., editors, The-
ory and Practice of Natural Computing, pages 83–94,
Cham. Springer International Publishing.
Mestetskiy, L. and Zhuravskaya, A. (2020). Mirror sym-
metry detection in digital images. In Proceedings of
the 15th International Joint Conference on Computer
Vision, Imaging and Computer Graphics Theory and
Applications (VISIGRAPP 2020) - Volume 4: VIS-
APP, pages 331–337. INSTICC, SciTePress.
Rosin, P. (2006). Training cellular automata for image pro-
cessing. IEEE Transactions on Image Processing,
15(7):2076–2087.
Rosin, P., Adamatzky, A., and Sun, X. (2014). Cellular Au-
tomata in Image Processing and Geometry. Springer
International Publishing.
S
´
anchez, J. and Lopez-Ruiz, R. (2006). Symmetry pattern
transition in cellular automata with complex behavior.
Chaos Solitons & Fractals.
Vayadande, K., Pokarne, R., Phaldesai, M., Bhuruk, T., and
Kumar, P. (2022). Simulation of conway’s game of
life using cellular automata. International Research
Journal of Engineering and Technology.
Wang, Z., Tang, Z., and Zhang, X. (2015). Reflection sym-
metry detection using locally affine invariant edge cor-
respondence. IEEE Transactions on Image Process-
ing, 24(4):1297–1301.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
322
