
Conceptual Approaches to Identify the Hazardous Scenarios in Safety
Analysis for Automated Driving Systems
Marzana Khatun
1 a
, Florence Wagner
2 b
, Rolf Jung
2
and Michael Glass
3
1
Kempten University of Applied Sciences, Bahnhofstrasse 61, Kempten, Germany
2
Institute for Driver Assistance and Connected Mobility, Benningen, Germany
3
Embedded Systems/ Real-Time Systems, University of Ulm, Ulm, Germany
fl
Keywords:
Functional Safety, Safety of the Intended Functionality, Hazard Analysis and Risk Assessment, Automated
Driving System, Machine Learning.
Abstract:
To ensure safety of the road users is one of the major challenges in highly automated driving. The technologies
applied in semi or fully-automated vehicles that are safer than human drivers compromise functionalities and
human comfort. A comprehensive understanding of the use of complex driving systems and the Operational
Design Domain (ODD) is essential for the effective deployment and safe operation of Automated Driving
Systems (ADSs). Hazard analysis is a foundation of various safety engineering methods, which include Func-
tional Safety (FuSa) and Safety Of The Intended Functionality (SOTIF). The scenario-based analysis offers
significant advantages in the safety analysis of automated vehicles but poses inherent difficulties in identify-
ing unknown-hazardous scenarios. The work presented in this paper deals with the conceptual approaches of
hazard scenario identification. Moreover, discusses the incorporation of Machine Learning (ML) in Hazard
Analysis and Risk Assessment (HARA) for vehicles equipped with ADSs. Furthermore, this paper can serve
as foundation support for research inquiries related to ADSs validation and safety assessment.
1 INTRODUCTION
The complexity in Automated Driving Systems
(ADSs) has brought safety aspects to the forefront of
research efforts (Tu and Sun, 2023). According to
Society of Automotive Engineers (SAE) J3016:2021
standard, automated or autonomous vehicles are cate-
gorized into six automation levels from level 0 (No
Driving Automation) to level 5 (Full Driving Au-
tomation). First three driving automation levels (0-
2) require a human driver who is at all times su-
pervising the support features and handling the driv-
ing for safety reasons. Level 3 higher are taking
over the driving task while level 3 can detect the
limits of its application range and request the driver
be in control, level 4 and 5 are not requiring some-
one to take over driving. This paper focuses on
driving automation level 4 (High Driving Automa-
tion) and/or level 5 (SAE, 2021). Current Functional
Safety (FuSa) and Safety Of The Intended Func-
tionality (SOTIF) related standards are focusing on
a
https://orcid.org/0000-0002-3839-1575
b
https://orcid.org/0009-0009-2515-1116
the automation level 2 where humans are responsi-
ble to ensure driving safety. Standards such as ISO
26262:2018 (ISO26262, 2018) for road vehicle FuSa
and ISO 21448:2022 (ISO21448, 2022) for road ve-
hicle SOTIF consider performance insufficiencies of
the complex components used in an ADS. More-
over, the upcoming ISO/PAS 8800 standard is a valu-
able addition that enhances safety in Artificial Intelli-
gence (AI)/Machine Learning (ML), providing essen-
tial guidelines as well (ISO/PAS8800, 2024).
Fully-automated vehicles are intended to drive ef-
ficiently from one point to another. According to a
study, the uses of automated driver-assistance systems
in Europe could reduce the number of accident by
about 15% by 2030 (Deichmann and Steiner, 2023).
ADS-equipped vehicles can add additional value to-
gether with human comfort for automotive industry
and could generate between $300 billion and $400
billion in the passenger car market by 2035, according
to McKinsey analysis (Deichmann and Steiner, 2023).
According to (Feldmann, 2023), Feldmann mentions
that the adoption of safety measures is hindered by
slow progress, mainly due to lack of resources. From
this motivation, the research questions addressing in
Khatun, M., Wagner, F., Jung, R. and Glass, M.
Conceptual Approaches to Identify the Hazardous Scenarios in Safety Analysis for Automated Driving Systems.
DOI: 10.5220/0013250900003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 549-555
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
549

this paper with respect to safety analysis of ADS-
equipped vehicles are:
1. What methodologies can be employed to identify
unknown-hazardous scenarios and subsequently
reduce unknown-hazardous concerns in the con-
text of SOTIF-related scenario evaluation?
2. What steps can be involved to perform scenario-
based hazard analysis, including scenario simula-
tion?
3. Can continuous improvement be achieved in haz-
ard analysis and risk assessment to effectively
support the verification and validation of auto-
mated driving systems?
4. What strategies or methodologies can be em-
ployed to ensure ongoing enhancement in this
critical aspect of automated vehicle development?
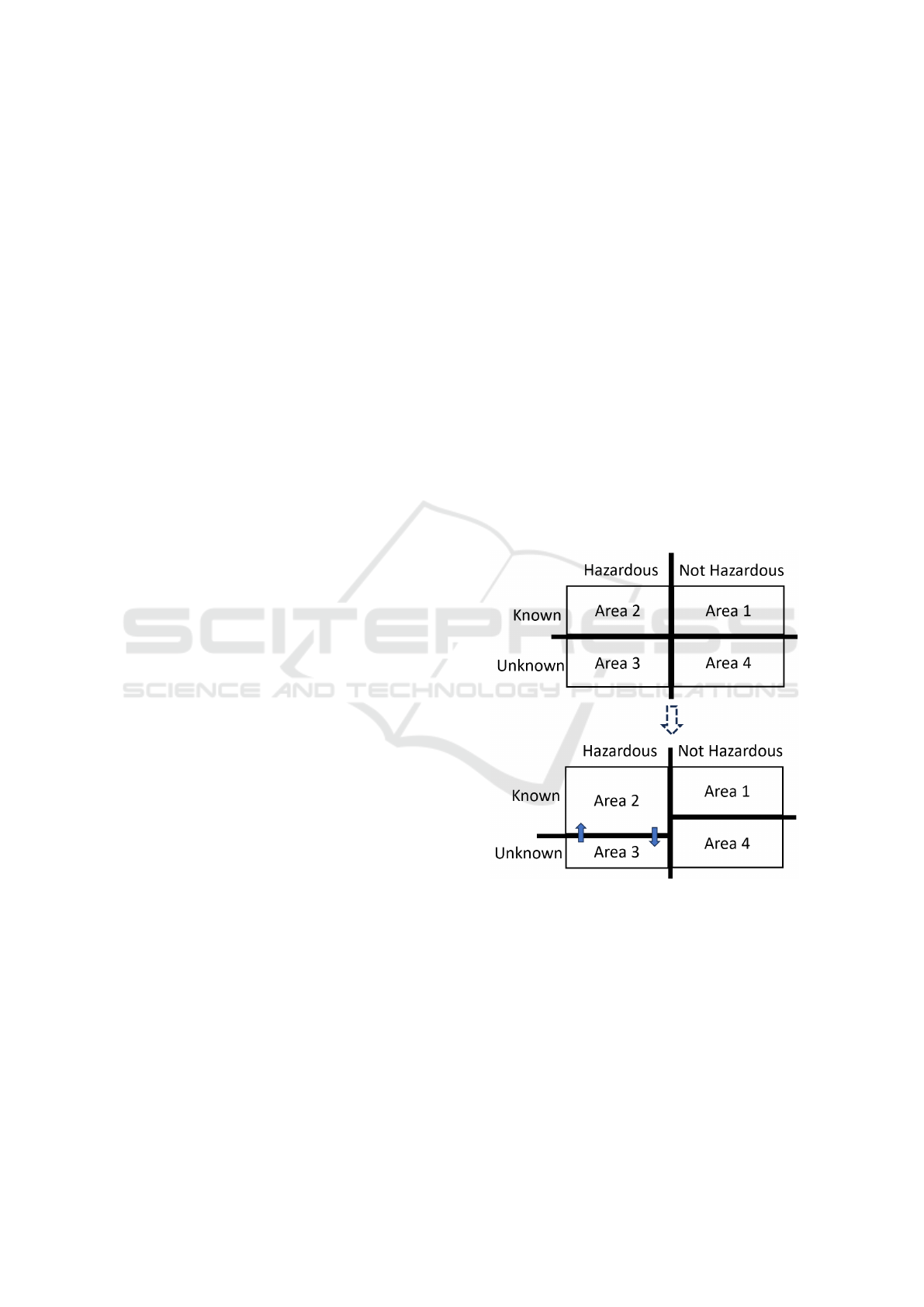
This paper focuses on the scenario-based safety
analysis in terms of hazardous scenario identification
and support to reduce the unknown-hazardous scenar-
ios. Unknown-hazardous scenarios are described as
Area 3 based on the scenario category division from
SOTIF standard. Here, the scenarios are classified
as known-not hazardous (Area 1), known-hazardous
(Area 2), unknown-hazardous (Area 3) and unknown-
not hazardous (Area 4). In relation to ADS safety, the
scenarios assigned to Area 3 are considered to be the
most critical. Scenario modeling and simulation play
a vital role in investigating and understanding the crit-
ical aspects of ADS safety. The contributions of this
paper are listed below:
• Propose conceptual approaches to incorporate a
new technology in hazardous scenario identifica-
tion.
• Description of safety-related scenarios to support
scenario-based hazard analysis and risk assess-
ment for automated vehicles.
• Illustrate incorporation of ML and determinis-
tic approaches in scenario-based Hazard Analysis
and Risk Assessment (HARA) applicable in au-
tomation level 4 or higher. Looking at level 4 and
5 of driving automation the driving features will
be in control and will not require a human driver
to take over.
The outline of this paper is as follows, Section
2 introduces normative definitions of terms used in
safety and cybersecurity domain. Section 3 presents
the proposed approaches to identify hazardous scenar-
ios and risk assessment. Finally, Section 4 provides a
redundant summary of the discussion and offers an
outlook on the future perspectives of the study.
2 LITERATURE STUDY
2.1 Normative Terms and Definitions
According to SAE J3016:2021 (SAE, 2021), ADS is
the ”hardware and software that are collectively ca-
pable of performing the entire dynamic driving task
on a sustained basis, regardless of whether it is lim-
ited to a specific ODD; this term is used specifically
to describe a Level 3, 4, or 5 driving automation sys-
tem.” The ODD is described as the ”specific condi-
tions under which a given driving automation system
is designed to function” (ISO21448, 2022). The ODD
is not limited to, environmental, geographical, and
time-of-day restrictions, and/or the requisite presence
or absence of certain traffic or roadway characteris-
tics (SAE, 2021). According to ISO 26262-1:2018
(ISO26262, 2018), SAFETY is the ”absence of unrea-
sonable risk”. FUNCTIONAL SAFETY is defined as an
”absence of unreasonable risk due to hazards caused
by malfunctioning behavior of electrical and/or elec-
tronic systems”. A HAZARD is defined as a ”potential
source of harm caused by malfunctioning behavior of
the item”, and a HAZARDOUS EVENT is defined as
a ”combination of a hazard and an operational situ-
ation”. The HARM indicates the ”physical injury or
damage to the health of persons” (ISO26262, 2018).
According to ISO 21448:2022, a SCENARIO is de-
scribed as ”a temporal relationship between several
scenes in a sequence of scenes, with goals and values
within a specified situation, influenced by actions and
events” (ISO21448, 2022). The HAZARDOUS SCE-
NARIO is a ”scenario when harm occurs unless pre-
vented by an entity other than the ADS” (ISO34502,
2022).
2.2 Methods and Technologies
As stated in 26262-1:2018 (ISO26262, 2018), a
FUNCTIONAL CONCEPT is described as ”specifica-
tion of the intended functions and their interactions
necessary to achieve the desired behavior. The func-
tional concept developed during the concept phase de-
scribes a set of specification of the functional safety
requirements, with associated information, their allo-
cation to elements within the architecture, and their
interaction necessary to achieve the safety goals”.
HARA is a ”method to identify and categorize haz-
ardous events of items and to specify safety goals and
automotive safety integrity levels related to the pre-
vention or mitigation of the associated hazards in or-
der to avoid unreasonable risk” (ISO26262, 2018).
The growing need for large-scale coverage of sce-
narios in autonomous vehicles is driving the adop-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
550
tion of technologies such as ML models. These tech-
nologies are used to support scenario-based analysis,
identifying safety-critical parameters, scenario sim-
ulation and reduction in testing and optimize time
efficiency. In (Grigorescu and Macesanu, 2020),
GRIGORESCU, TRASNEA, COCIAS AND MACE-
SANU present a survey of the current state-of-the-art
on deep learning technologies used in autonomous
driving. Simulation-based HARA is suggested by
(Oakes, 2021) but focused on fault injection not in
hazardous scenario identification. Furthermore, a
concept of hazard scenario identification is presented
in (Khatun and Glaß, 2023) based on simulated sce-
nario but risk assessment was not present in detail.
Scenario-based HARA supports to understand and
realize the hazardous events and is widely applied in
automated vehicle’s safety assessment (Madala and
Solmaz, 2023; Khatun and Jung, 2020). To in-
vestigate the hazard and risk methods like, System-
Theoretic Process Analysis (STPA) and dynamic haz-
ard approach are applied in ADS-equipped vehicles
(Chen and Zhao, 2020; Schwalb, 2021). A priori
safety risk assessments of ADS-equipped vehicles
road tests are of great importance as they allow quan-
tification of the level of risk in different road scenarios
and provide guidance for such vehicles road tests (Tu
and Sun, 2023),(TR5469, 2024). AI technologies can
not only help to recognize, research and to define haz-
ardous scenarios, but they can also accelerate func-
tional safety analyses. Although validating AI system
safety poses significant challenges, it can be managed
effectively through rigorous confirmation measures.
A scenario-based HARA approch is presented
here with the support of ML model to define the in-
puts that are the key to establish the base scenario
framework in HARA, applicable for L3 and/or higher
level of automation (L4/L5.)
3 PROPOSED HAZARD
ANALYSIS APPROACHES
3.1 Scenario-Based Hazard Analysis
While scenario-based analysis has many advantages
by means of detail description and reducing misun-
derstanding in autonomous safety analysis, it also has
some shortcomings. The time and effort required
for scenario-based HARA is very high. One of the
biggest challenges is the number of scenarios that
need to be considered for risk assessment. A further
obstacle arises from the limited applicability of real-
world scenarios to automation level 3 and/or higher,
leading to the emergence of novel hazard scenarios
that cannot be effectively derived from real-world sce-
narios. In such cases, the inclusion of simulation-
based scenarios is essential for comprehensive safety
analyses.
Simulation-based approaches have gained signifi-
cant traction for identifying unknown-hazardous sce-
narios (Zhang and Felbinger, 2023). ISO 21448:2022
introduces scenario categories divided into areas 1
to 4, based on the attributes known/unknown and
hazardous/non-hazardous. These categories are used
to facilitate the preparation of the safety concept and
the definition of hazardous events. The hazard analy-
sis begins with the known hazardous scenarios (Area
2). Simulation-based and knowledge-based investiga-
tions based on safety-related parameters can be used
to reduce the scope of Area 3, as shown by the ar-
rows in Fig. 1. In cases where simulation-based sce-
nario analysis begins with known-hazardous scenar-
ios, the utilization of parameter variation techniques
aids in the identification of unknown-hazardous sce-
narios and thus leads to a reduction in the scope of
Area 3 (See Fig. 1).
Figure 1: Scenario Categories Visualization with Areas.
3.2 Proposed Concepts
The conceptual approaches proposed in this take into
account the different representations of real-world
crash scenarios, virtual scenarios, and pre-crash sce-
narios. To generate scenarios methods like, tree dia-
gram, formal rule-based and model-based approaches
can be applied for safety analyses (Khan and Vijay,
2023; Faysal, 2022). For scenario-simulation tools
like, CarMaker (IPG-Automotive, ), MATLAB (Mat-
lab, ), Simulation of Urban Mobility (SUMO) (Li,
Conceptual Approaches to Identify the Hazardous Scenarios in Safety Analysis for Automated Driving Systems
551
2023), Unity3D (Gang, 2016), CARLA Simulator
(Horel, 2022) are utilized in various stages of verifica-
tion and validation. To generate and identify critical
scenarios, SOTIF-related hazard analysis and risk as-
sessment (HARA) includes several areas to consider
(Kon
´
e and G
´
eronimi, 2023; Yang et al., 2023; Sana
and Raahemifar, 2023; Kramer et al., 2020). These
include ODD, environmental conditions, and com-
plex system features leading to limitations in human-
performed HARA due to the heightened volume of
scenarios.
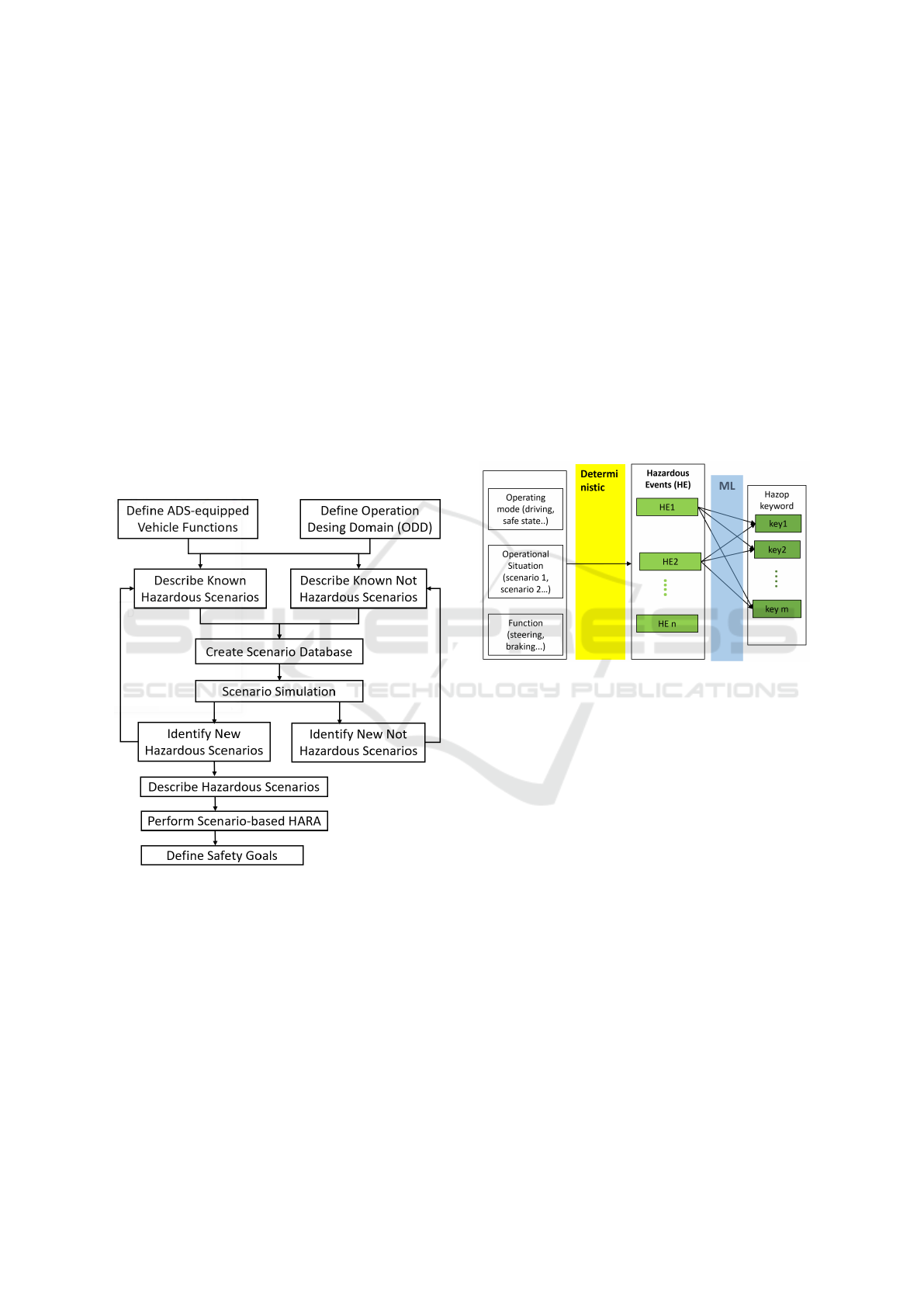
The different representations of these scenarios
cause difficulties in analyzing of hazards for auto-
mated driving systems. To aid in mitigating chal-
lenges, a generic flow diagram is depicted in Fig.
2. The flow diagram in Fig. 2 shows the possibili-
ties how a scenario database can be created and sim-
ulated for identifying unknown-hazardous scenarios
and continuously update the scenario database.
Figure 2: Proposed Flow Diagram for Scenario-based
HARA.
In the following two concepts, both determinis-
tic (yellow color) and ML model (light blue color)
approaches are integrated within the context of haz-
ardous scenario identification and risk assessment for
ADS-equipped vehicles. The concepts include the use
of Hazard and Operability Analysis (HAZOP) key-
words displayed as dark green color (see in Fig. 3 and
Fig. 4) and characteristics that are used in describing
hazardous events (light green color), as shown in Fig.
3 and Fig. 5.
Concept 1. The proposed concept 1 is divided into
two segments. In the first segment, the hazardous
events are compiled based on the characteristics of the
scenario descriptions. Finite number of Hazardous
Events (HE) are presented in Fig. 3 from 1 to n
(HE1, HE2, ..., HEn). Then, hazardous events are
combined with the predefined HAZOP keywords by
applying an ML technique. The characteristics men-
tioned in Fig. 3 are operating mode, operational sit-
uation and vehicle functions. The deterministic ap-
proach is marked by a yellow block and can be car-
ried out by a knowledge-based method for describ-
ing hazard events. The number of hazard events can
range from a finite number between 1 and n (see Fig.
3). The hazardous events database can be employed
to identify previously unknown-hazardous scenarios,
thereby contributing to the reduction of Area 3.
Figure 3: Hazardous Scenario Identification - Concept 1
(Segment 1).
In the second segment of concept 1, hazard events
combined with HAZOP keywords are used to formu-
late Accident Scenarios (ACs). Each HAZOP key-
word is associated with individual hazardous events,
to define multiple sets of accident scenarios (red
color) as shown in Fig. 4. A ML model can be ap-
plied to determine the Severity (S), Exposure (E) and
Controllability (C). Based on these three parameters,
Automotive Safety Integrity Level (ASIL) can be de-
fined using risk graph or risk matrix for risk assess-
ment of ADS-equipped vehicles.
An exemplary case: The operating mode is driv-
ing an ADS-equipped vehicle in an operating sce-
nario in which the vehicle performs a lane change
from the right to the left lane on a straight highway
in sunny weather. To perform the lane change, the
ADS-equipped vehicle uses the steering, acceleration,
and braking functions. There are other road users
on the road that are passed by an ADS-equipped ve-
hicle while it is performing a lane change. A haz-
ardous event can be described as follows: The cam-
era sensor fails to detect the lane marking while an
ADS-equipped vehicle is performing a lane change.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
552
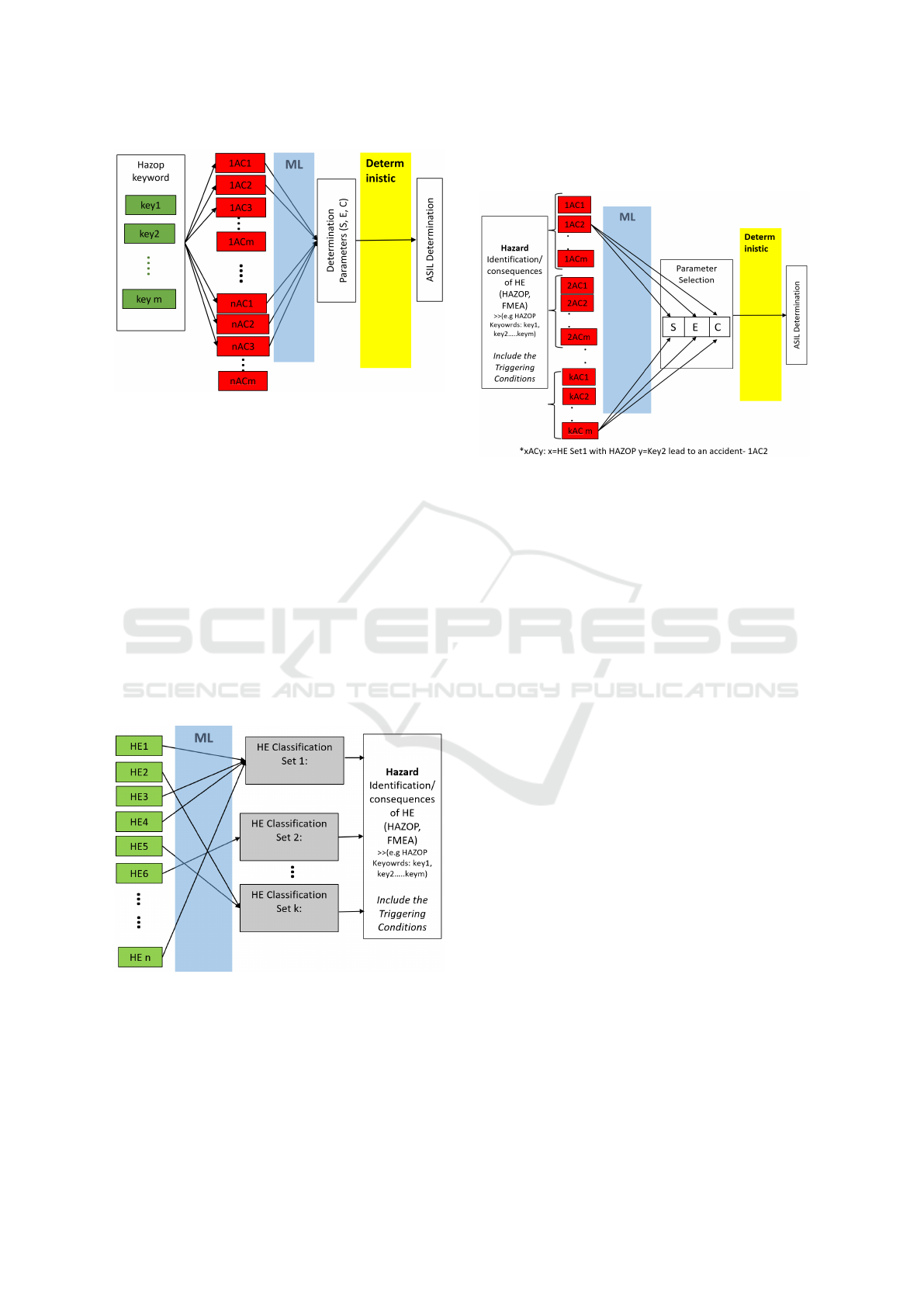
Figure 4: Hazardous Scenario Risk Assessment - Concept
1 (Segment 2).
Some of the traditional HAZOP keywords are no or
not, late, after. Based on the HAZOP keywords,
ACs can be described as follows: A rear-end colli-
sion occurs. Accident database can be used as mixed
datasets. Mixed datasets can be used to identify the
parameters (S, E, C) using deep neural networks, such
as convolutional neural networks and recurrent neural
networks. Finally, a deterministic method can be ap-
plied to determine ASIL based on ISO 26262:2018.
Concept 2. Concept 2 is divided into two segments.
First, hazardous events are considered as database for
ML. Hazardous events are classified into several sets
as shown in Fig. 5 The HE classification sets are pre-
sented in Fig. 5 from 1 to k (set 1, set 2, ..., set k).
Figure 5: Hazardous Scenario Identification - Concept 2
(Segment 1).
Afterward, the sets of hazardous events are com-
bined with the HAZOP keywords to describe the ACs.
Several sets of finite ACs are shown in Fig. 6 that are
considered based on the hazardous events with HA-
ZOP keywords. The accident database can be con-
sidered as a mixed dataset, containing both numerical
and textual values.
Figure 6: Hazardous Scenario Risk Assessment - Concept
2 (Segment 2).
An exemplary case: publicly available hazardous
events from real-world scenarios are used together
with simulated scenarios and considered as the base
for ML models, which can be used to classify haz-
ardous events. Each of these classification blocks can
be associated with HAZOP keywords to create ACs.
An AC can be expressed as follows: Accident on the
highway, as vehicles equipped with ADS show an un-
intended behavior and injure a human. The ML model
should provide the parameters (S, E, C), and later
ASIL can be determined based on the deterministic
approach.
4 CONCLUSION
The work showcases the conceptual approaches how
ML models can be applied for the scenario-based
HARA with respect to FuSa and SOTIF aspects. Two
conceptual approaches are presented which gives the
fundamental of incorporating ML in safety analyses
by means of HARA. This paper presents the basics
of HARA through the interplay of ML and determin-
istic approaches. This integration provides valuable
insights for safety mechanisms in hazardous scenar-
ios. The proposed approach not only improves the
depth of risk assessment, but also enables real-time
adjustments and scenario updates as new data be-
comes available, making the risk management pro-
cess more dynamic and responsive. Ultimately, the
use of AI in scenario-based HARA supports a more
proactive security strategy that responds to emerging
threats in complex systems such as autonomous vehi-
cles and other AI-driven applications.
Conceptual Approaches to Identify the Hazardous Scenarios in Safety Analysis for Automated Driving Systems
553

In future, simulation and publicly available real-
world scenario database will be considered for safety
analysis. To perform verification of the scenario-
based HARA for ADS-equipped vehicle, safe human
intervention needs to be ensured. The safety pro-
cesses should include all possible safety-critical hu-
man interventions and provide safety measures to re-
duce the risk. To support safety analysis, ML tech-
niques can be applied in HARA with acceptable ver-
ification and validation processes that include new
test strategies and methods. To validate the scenario-
based HARA for ADS-equipped vehicles, it is essen-
tial to incorporate a human safety intervention pro-
cess. This process is aimed at evaluating the HARA
results in view of the ML applications to maintain the
integrity of the assessment.
ACKNOWLEDGEMENTS
This research work is funded by the Institute for
Driver Assistance and Connected Mobility (IFM),
Junkersstraße 1A, 87734 Benningen, Germany.
REFERENCES
Chen, L., J. J. and Zhao, T. (2020). A novel hazard analysis
and risk assessment approach for road vehicle func-
tional safety through integrating stpa with fmea. Ap-
plied Sciences 10, no. 21: 7400.
Deichmann, J., E. E. H.-K. H. R.-K. M. and Steiner, F.
(2023). Autonomous driving’s future: Convenient and
connected. McKinsey Center for Future Mobility,
McKinsey & Company.
Faysal, J. A. (2022). Formal rule-based scenarios for the de-
sign of safe autonomous vehicles. modeling and sim-
ulation. HAL open Science, Universi
´
e C
ˆ
ote d’Azur.
Feldmann, A. (2023). The industry adoption of innovative
safety-analysis approaches for autonomous vehicles.
KTH Industrial Engineering and Management, master
thesis edition.
Gang, S.-M., C. H.-W. K. D.-R. C. Y.-J. (2016). A study on
the construction of the unity 3d engine based on the
webgis system for the hydrological and water hazard
information display. Procedia Engineering, vol 154,
PP. 138–145.
Grigorescu, S., T. B. C.-T. and Macesanu, G. (2020). A
Survey of Deep Learning Techniques for Autonomous
Driving. Elektrobit Automotive and the Robotics
Vision and Control Laboratory (ROVIS Lab), De-
partment of Automation and Information Technology,
Transilvania University of Brasov, Romania.
Horel, J.-B., L. C.-M. L. M.-R. M. L.-e. a. (2022). Using
formal conformance testing to generate scenarios for
autonomous vehicles. In Automation and Test in Eu-
rope - Autonomous Systems Design.
IPG-Automotive. Carmaker: Software tool. https://ipg-
automotive.com/de/anwendungen/autonomes-
fahren/.
ISO21448 (2022). ISO 21448: Road vehicles - Safety of the
intended functionality. ISO Standard, 1 edition.
ISO26262 (2018). ISO 26262: Road vehicles - Functional
Safety: Part 1 to Part 13. ISO Standard, 2 edition.
ISO34502 (2022). ISO 34502: Road vehicles — Test
scenarios for automated driving systems — Scenario
based safety evaluation framework. ISO Standard, 1
edition.
ISO/PAS8800 (2024). ISO PAS 8800: Road vehicles -
Safety and artificial intelligence. ISO Standard/Under
development, 1 edition.
Khan, J. and Vijay, C. (2023). 27th international technical
conference on the enhanced safety of vehicles (esv),
yokohama, japan. In alidation of safety of the intended
functionality for autonomous driving systems.
Khatun, M., G. M. and Jung, R. (2020). Scenario-based
extended hara incorporating functional safety & sotif
for autonomous driving. In 30th European Safety and
Reliability Conference.
Khatun, M., J. R. and Glaß, M. (2023). Scenario-based col-
lision detection using machine learning for highly au-
tomated driving systems. In In Journal Systems Sci-
ence & Control Engineering, vol. 11, no. 1. Taylor &
Francis.
Kon
´
e, T. F., B. E.-L. E. M.-F. and G
´
eronimi, S. (2023).
An approach to guide the search for potentially haz-
ardous scenarios for autonomous vehicle safety vali-
dation. Applied Sciences, vol. 13, no. 11, p. 6717.
Kramer, B., Neurohr, C., B
¨
uker, M., B
¨
ode, E., Fr
¨
anzle, M.,
and Damm, W. (2020). Identification and quantifica-
tion of hazardous scenarios for automated driving. In
Model-Based Safety and Assessment.
Li, X., T. S. L.-B. D. X.-N. X. W.-F.-Y. (2023). Ieee trans-
actions on intelligent vehicles, vol. 8, no. 5. In Let-
ters: Advanced Scenario Generation for Calibration
and Verification of Autonomous Vehicles.
Madala, K. and Solmaz, M. (2023). Scenario-based risk
quantification approach for assuring safety in au-
tonomous vehicles. SAE Technical Paper 2023-01-
0584.
Matlab. Matlab: Software tool, automatic sce-
nario generation. https://www.mathworks.com/help/
driving/ug/automatic-scenario-generation.html.
Oakes, B. J., M. M.-M. S. V.-V. H. D.-J. (2021). Machine
learning-based fault injection for hazard analysis and
risk assessment. In Computer Safety, Reliability, and
Security. Springer International Publishing.
SAE (2021). SAE J3016: Taxonomy and Definitions for
Terms Related to Driving Automation Systems for On-
Road Motor Vehicles. SAE Standards.
Sana, F., A. N. L. and Raahemifar, K. (2023). Autonomous
vehicle decision-making and control in complex and
unconventional scenarios—a review. Machines, vol.
11, no. 7, p. 676.
Schwalb, E. (2021). Analysis of hazards for autonomous
driving. ASME Journal of Autonomous Vehicles Sys-
tems,vol.1, no. 2: 021003.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
554

TR5469, I. (2024). Iso/iec tr 5469: Artificial intelligence
— functional safety and ai systems. Technical report,
ISO/IEC.
Tu, H., W. M. L.-H. and Sun, L. (2023). Safety risk assess-
ment for autonomous vehicle road testing. In Traffic
Injury Prevention. Taylor & Francis.
Yang, Y., Kujanp
¨
a
¨
a, K., Babadi, I. A., Pajarinen, J., and
Ilin, A. (2023). Suicidal pedestrian: Generation of
safety-critical scenarios for autonomous vehicles. In
2023 IEEE 26th International Conference on Intel-
ligent Transportation Systems (ITSC), pages 1983–
1988.
Zhang, X., T. J. T.-K. T. M.-J. S. M. G.-R. M. T. X. G. M. W.
F. F. M. N. N. M. and Felbinger, H. (2023). Ieee trans.
softw. eng., vol. 46, no. 3, ieee press, pp. 991–1026.
In Finding Critical Scenarios for Automated Driving
Systems: A Systematic Mapping Study.
Conceptual Approaches to Identify the Hazardous Scenarios in Safety Analysis for Automated Driving Systems
555
