
Backface Distance Fields: Relaxing Signed Distance Fields
R
´
obert B
´
an
a
, Csaba B
´
alint
b
and G
´
abor Valasek
c
E
¨
otv
¨
os Lor
´
and University, Faculty of Informatics, Department of Algorithms and their Applications, Hungary
{rob.ban, csabix, valasek}@inf.elte.hu
Keywords:
Sphere Tracing, Signed Distance Fields, Ray-Surface Intersection, Unbounding Spheres, Safety Volumes.
Abstract:
We propose backface distance functions, an implicit volume representation that improves the convergence rate
of sphere tracing. We employ the closest signed distances to backfacing surface points, introducing a relaxed
representation of signed distance functions. The backface and signed distance functions coincide within the
volume. For external points, we prove that a backface distance-sized step is the largest direction-independent
step along a ray that does not pass through the volume boundary more than once. We show analytic and discrete
realizations of our concept. We present a discrete backface distance field generation method to construct exact
and approximate fields from triangular meshes and procedural implicit scenes. We employ generation-time
processing and correction steps in the discrete case to ensure robust surface visualization in combination with
GPU filtering. We validate the proposed discrete and analytic representations empirically as well by comparing
their performance to basic, relaxed, and enhanced sphere tracing and demonstrate that it generally outperforms
the other methods.
1 INTRODUCTION
Signed distance functions (SDFs) and discrete signed
distance fields provide versatile means to express and
manipulate shapes of high geometric and topologi-
cal complexity. Moreover, there are efficient means
to directly render SDFs. The most popular itera-
tive algorithm for the latter is Hart’s sphere tracing
(Hart, 1996) that operates on both analytic and dis-
crete signed distance representations. Several vari-
ations have been proposed that improve its perfor-
mance while preserving its robustness (Keinert et al.,
2014; B
´
alint and Valasek, 2018). These approaches
increase the trace step sizes based on user-provided
hyper-parameters. Their optimal values depend on the
scene and whether the input is analytic or discrete.
Our goal is to incorporate a relaxation into the
signed distance representation itself that increases
step sizes during intersection computations. In
essence, we aim to find the SDF analogue of relaxed
cone maps (Policarpo and Oliveira, 2007).
As such, we investigate the problem of robust and
efficient ray-surface intersection computation from a
representational perspective. We deviate from tradi-
tional signed distance descriptions by incorporating
a
https://orcid.org/0000-0002-8266-7444
b
https://orcid.org/0000-0002-5609-6449
c
https://orcid.org/0000-0002-0007-8647
an isotropic relaxation into the representation itself
via using shortest signed distances to backfacing sur-
face points. We refer to these constructs as backface
distance functions (BDF) and discrete backface dis-
tance fields.
We show that open spheres with such radii ensure
that any ray originating from their center may only
intersect the volume boundaries at most once. More-
over, these semidiameters are optimal sphere trace
step sizes if ray directions are not known a priori. The
BDF coincides with the SDF on the interior of vol-
umes, allowing the sphere trace algorithm to render
discrete and analytic BDFs.
Our main results are summarized as follows:
• We give a geometric and analytic characterization
of backface distance functions and show that these
are complete yet discontinuous volume represen-
tations.
• We derive the analytic BDF for several primi-
tives and show empirically that these can be traced
more efficiently than their SDF counterparts.
• We propose a discrete backface distance field rep-
resentation that interpolates correctly with GPU
trilinear filtering. It has the same storage require-
ments as a discrete SDF.
• We present a backface distance field generation
algorithm that converts signed distance fields,
Bán, R., Bálint, C. and Valasek, G.
Backface Distance Fields: Relaxing Signed Distance Fields.
DOI: 10.5220/0013251700003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 127-138
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
127
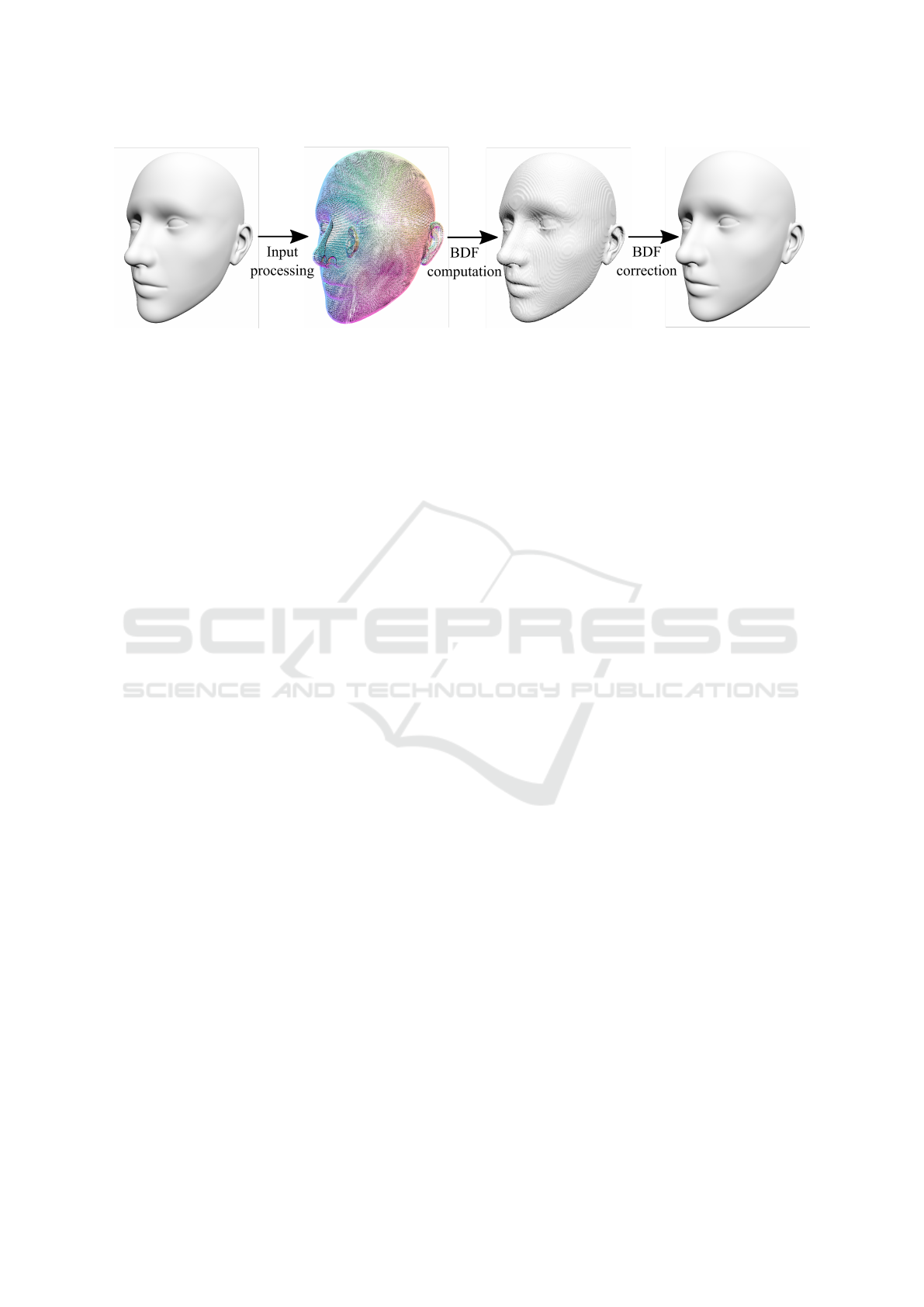
Figure 1: The three stages of our proposed backface distance field (BDF) generation process. First, an input-type dependent
pre-processing step generates data to acquire surface boundary samples throughout the generation process. These samples
may be actual geometric point-normal pairs from the surfaces or auxiliary data that accelerate surface traversals during BDF
computations, such as initial parameter values for closest points for parametric boundaries. The second stage populates a 3D
grid of samples with BDF values in accordance with Algorithm 1. Finally, a correction step, in Algorithm 2, takes this discrete
BDF and expands the SDF region around the zero level set to preserve the original contour and, optionally, surface normals
too. The 256
3
output BDF of the second stage is rendered at 0.48ms on an Nvidia 2080 GPU at 1920 ×1080 resolution, while
the final silhouette- and normal-corrected BDF is rendered at 0.77ms. In comparison, the 256
3
SDF of the scene is rendered
in 1.02ms on the same configuration.
signed distance functions, general implicits, and
triangular meshes to our proposed representation.
In the following, Section 2 provides an overview
of related work. Our theoretical results are presented
in Section 3, where we provide a geometric and ana-
lytic characterization of the BDF and show that it is
an exact volume representation.
Equipped with these geometric insights, we derive
a simple, GPU-friendly BDF generation algorithm in
Section 4 that is used to convert a variety of represen-
tations into BDFs. We highlight how runtime filtering
footprints must be incorporated into the construction
algorithm to ensure robustness of runtime rendering.
Section 5 presents how ray-surface intersections
are computed on BDFs. In Section 6, we compare
our method to various sphere tracing variants on ana-
lytic and discrete scenes. Finally, we discuss the ad-
vantages and limitations of our technique in Section 7
and conclude our paper.
2 RELATED WORK
2.1 Heightmap Rendering
Our research mainly aimed to identify the SDF equiv-
alent of relaxed cone maps, a data structure used in
heightfield rendering. Heightmaps augment coarser
geometries with mesostructural detail. A wide range
of algorithms have been proposed to compute the per-
pixel exact or approximate ray-heightfield intersec-
tion (Szirmay-Kalos and Umenhoffer, 2008).
To find intersections, Dummer proposed to store
the widest upward cone that does not overlap with
the interior of the heightfield (Dummer, 2006). Their
cone step mapping method intersects the rays with
these cones to tend to the exact ray-heightfield inter-
section without skipping intersections.
A relaxation by expanding the cone angles was
proposed in (Policarpo and Oliveira, 2007). The
cones in this representation are the widest that allow
a single intersection between a ray and the height-
field if the former is entering the heightfield volume
from above. In contrast to conservative cones, re-
laxed cone maps guide the rays into the heightfield
volume, thus they require a root refinement method,
such as regula falsi, to find the precise ray-surface
intersection. Depending on the step counts, relaxed
cone step mapping provides a 5-20% performance im-
provement over conservative cone maps.
In terms of robustness, it must be noted that
relaxed cone maps may skip over intersections for
rays that are already within the heightfield volume.
This issue was investigated in detail by Baboud et
al. in (Baboud et al., 2012) and they resolved it
by proposing an alternative representation that stores
pre-computed safety distances. They also showed the
importance of distances from backfacing triangles in
the computation of the safety distances. More re-
cently, it was shown in (B
´
an et al., 2024) that nei-
ther conservative nor relaxed cone maps interpolate
correctly under bilinear interpolation, highlighting the
importance of taking into account runtime filtering
during cone map generation.
We set out to derive the SDF analogue to relaxed
cone maps (Policarpo and Oliveira, 2007). We pro-
vide an exact geometric and analytic characterization
of such constructs. We show both analytic and dis-
crete realizations of our proposed representation and
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
128

verify that similar performance gains can be obtained
to that of relaxed cone maps.
2.2 Signed Distance Representation
Signed distance functions are compact and expres-
sive means to represent and visualize a wide range
of shapes and their various combinations. These are
used in various application domains, from physics,
through geometric modeling, to computer graphics
(Ohtake et al., 2001; Green, 2007; Wright, 2015;
Evans, 2015; Angles et al., 2017; Osher and Fedkiw,
2003; Fuhrmann et al., 2003). As SDFs form a sub-
set of implicit functions, they inherit the property that
unions, intersections, and complements are expressed
as maximum, minimum, and negation operations on
the arguments (Bajaj et al., 1997). However, the re-
sulting functions are generally signed distance lower
bounds, not exact signed distances (Hart, 1996), al-
though alternate set theoretic operation formulations
have been proposed to preserve the distance property
(Akleman and Chen, 2003).
It was noted (Hart, 1996; Kalra and Barr, 1989)
that an SDF value paired with the point of evaluation
defines an unbounding sphere, an open spherical vol-
ume that does not intersect with the boundaries of the
scene. These are used to traverse a ray at variable step
sizes without skipping over ray-surface intersections.
Keinert et al. (Keinert et al., 2014) proposed a
step-size over-relaxation-based method to speed up
sphere tracing. They use an ω ∈ [1, 2) constant step
size multiplier during trace and fall back to a tradi-
tional sphere trace step if the next guess produces an
unbounding sphere that is disjoint from the previous.
B
´
alint et al. (B
´
alint and Valasek, 2018) reuse data
from the current and previous steps to construct a lin-
ear approximation to the SDF function along the ray
and use it to infer the closest ray parameter where the
unbounding sphere is tangent to the current one. This
is an optimal step size if the approximated surface is
planar. Similarly to the over-relaxation method above,
a basic sphere trace step is taken if the unbounding
sphere is disjoint from the current one.
Galin et al. (Galin et al., 2020) proposed to com-
pute local Lipschitz bounds along the ray, showing
that it could provide more efficient rendering for a
particular family of implicit functions. Their segment
tracing technique offers high accuracy and does not
require a fallback to sphere tracing, as all steps are
safe. However, it does not apply to discrete represen-
tations, it is currently restricted to a subset of implicit
representations, and even though it solves ray-surface
intersection queries in a handful of steps, these it-
erations are costly computationally. Aydinlilar and
Figure 2: Signed distance function (left) and backface dis-
tance function (right) comparison in two dimensions. Three
parallel rays are traced for each representation comparing
how sphere tracing finds the closest intersection.
Zanni (Aydinlilar and Zanni, 2023) propose to use
bounds on the derivatives to infer conservative upper
and lower bounds on the function value along the ray.
Our proposed representation has both analytic and
discrete realizations. It is rendered by basic sphere
tracing and does not require a hyperparameter. More-
over, we show that it outperforms basic, relaxed, and
enhanced sphere tracing both for analytic and discrete
input. As our representation coincides with SDFs
in volume interiors, it trivially retains the same con-
tour as SDFs, however, this requires a BDF correc-
tion step for the discrete case that we show in Sec-
tion 4. BDFs are closed under union using the same
functional point-wise minimum representation. Un-
like SDF lower bounds, however, it is not closed un-
der intersections and complements.
3 BACKFACE DISTANCE
FUNCTIONS
In this section, we investigate the theoretical proper-
ties of backface distance functions. We present a ge-
ometric and analytic characterization of the boundary
entities that function as the closest surface points for
the BDF distance values. We also show that the BDF
is an exact representation of the volume from which
it was generated; as such, it is not merely an auxil-
iary acceleration structure for rendering but a com-
plete volume representation.
3.1 Notation and SDFs
Let
b
x
x
x =
x
x
x
∥x
x
x∥
denote the direction of x
x
x ̸= 0
0
0. The c ∈ R
level set of an implicit function f
:
R
3
→ R is written
as {f = c} = {x
x
x ∈ R
3
| f (x
x
x) = c}. Similarly, {f ≤
c} = {x
x
x ∈ R
3
| f (x
x
x) ≤ c}. An f
:
R
3
→ R function
Backface Distance Fields: Relaxing Signed Distance Fields
129

Figure 3: The length of the green line represents the value
of the backface distance function of the unit sphere at point
x
x
x, whereas that of the orange segment represents the signed
distance value. The green surface section is the backface
surface set B
f
(x
x
x).
is a distance function (DF) if
f (x
x
x) = d(x
x
x, {f = 0}) = inf{∥x
x
x −y
y
y∥ | f (y
y
y) = 0},
(1)
and a signed distance function (SDF) if it is continu-
ous and |f | is a distance function (B
´
alint et al., 2019;
Luo et al., 2019). Usually, we require the SDF to
change sign when crossing the {f = 0} surface for
set operations and normal vector computation. The
term unbounding sphere refers to the |f (x
x
x)| radius
open ball around x
x
x ∈ R
3
, i.e. k
f (x
x
x)
(x
x
x) = {y
y
y ∈ R
3
|
∥y
y
y −x
x
x∥ < |f (x
x
x)|}, where f is an SDF.
3.2 BDF Definition and Geometry
Let us investigate the problem of finding the maxi-
mal open sphere such that any ray originating from
its center intersects the volume boundaries within the
sphere at most once. Generally, the radius of such a
sphere may be formulated as the signed distance to
the closest backface, i.e., points where the gradient
points away from the center of the sphere. Formally,
this is written as follows.
Definition 1. Assume that the f
:
R
3
→R SDF is dif-
ferentiable on the {f = 0} surface. The backface sur-
face set B
f
(x
x
x) is defined for all x
x
x ∈R
3
as
B
f
(x
x
x) = {y
y
y ∈ {f = 0} | ∇ f (y
y
y)
T
·(y
y
y −x
x
x) ≥ 0}. (2)
Definition 2. Assume that the f
:
R
3
→R SDF is dif-
ferentiable on the {f = 0} surface. The b
:
R
3
→ R
function is a backface distance function (BDF) if
b(x
x
x) = sgn( f (x
x
x)) ·d(x
x
x, B
f
(x
x
x)). (3)
Note that this implies that the BDF coincides
with the SDF inside the geometry, that is, for all
x
x
x ∈ {f ≤ 0}
:
b(x
x
x) = f (x
x
x) holds. Moreover, since
B
f
(x
x
x) ⊆ {f = 0} for all x
x
x ∈ R
3
, the backface dis-
tances are never less than the distance function, mean-
ing
f (x
x
x)
≤
b(x
x
x)
. This implies that the zero level-set
is the same, so storing both functions is unnecessary
solely for surface reconstruction. For example, the
BDF of a sphere in Fig. 3 is
b
sphere
(x
x
x) =
(
p
∥x
x
x∥
2
−1 if ∥x
x
x∥ > 1
∥x
x
x∥−1 if ∥x
x
x∥ ≤ 1
x
x
x ∈R
3
(4)
For polygons and polyhedrons, we calculate it as
the minimum distance to the backfacing sides. Fig-
ure 2 compares the exact SDF with the BDF.
Note that the BDF is not continuous. For example,
each plane of any small planar surface patch separates
the BDF into discontinuous partitions.
Let us now consider the problem of intersecting
rays with backface distance functions. We show that
taking a |b(x
x
x)|−ε sized step in any direction from
x
x
x may step over at most one root. If the sign of the
function changed after a step, a single root was over-
stepped; and if the sign did not change, no surface
intersection was skipped.
Proposition 1. Assume that the {b = 0} surface is
differentiable, where b
:
R
3
→R is its BDF. Then, for
any x
x
x + t
b
v
v
v ray, the following equation has at most a
single root in t ∈ [0, b(x
x
x) −ε] for any ε > 0:
b(x
x
x +t
b
v
v
v) = 0 (5)
Proof. We can assume that x
x
x is outside, that is, b(x
x
x) >
0. First, we show that the set of solutions is at most fi-
nite, and then we prove that it cannot have two differ-
ent elements. If there were a countable or otherwise
infinite number of solutions within that interval, there
would be an accumulation point around t
∗
, and any
neighborhood around it contains an infinite amount
of solutions. Since f is continuous, f (x
x
x + t
∗
b
v
v
v) = 0.
This means ∇ f (x
x
x +t
∗
b
v
v
v) exists, and since f is an SDF,
∥∇ f (x
x
x +t
∗
b
v
v
v)∥ = 1, and this gradient must be perpen-
dicular to the root series around t
∗
. This means that
x
x
x +t
∗
b
v
v
v ∈ B
f
(x
x
x), which contradicts t
∗
≤ b(x
x
x) −ε.
Let us assume that there are two neighboring solu-
tions, t
1
̸= t
2
. Since f is continuous and its gradient is
non-diminishing, f must change signs from positive
to negative and back. The sign change is the same as
the sign of ∇ f (x
x
x +t
i
b
v
v
v)
T
·
b
v
v
v, i ∈{1, 2}. Since the signs
differ, one is positive at t
j
( j ∈ {1, 2}) which would
mean that x
x
x+t
j
b
v
v
v ∈B
f
(x
x
x). This is a contradiction.
The following observation simplifies the BDF
generation by restricting the minimum distance
search to points either on the silhouette or where the
surface normal points to the opposite direction to the
query position.
Proposition 2. Assuming a differentiable surface, let
B
c
f
(x
x
x) = {y
y
y ∈ {f = 0} | ∇ f (y
y
y)
T
·(
[
y
y
y −x
x
x) = c}, (6)
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
130
for any c ∈[−1, 1]. Then, the backface distance func-
tion is
b(x
x
x) = d
x
x
x, B
0
f
(x
x
x) ∪B
1
f
(x
x
x)
. (7)
Proof. Definition 2 is a conditional minimization
problem on the closed set M = {y
y
y ∈ {f = 0} |
∇ f (y
y
y)
T
·(y
y
y −x
x
x) ≥ 0}. Thus, the minimum either lies
on the boundary of M or inside. In the former case,
∂M ∩{f = 0} = B
0
f
(x
x
x). If we omit the condition, we
have a standard closest point problem where we min-
imize ∥y
y
y −x
x
x∥ for x
x
x given that f (y
y
y) = 0. Applying
the Lagrange multiplier method gives the following
equation for the derivative for some λ ∈ R parameter
∇L(y
y
y) =
\
(y
y
y −x
x
x) + λ∇ f (y
y
y) = 0 .
This means that
\
(y
y
y −x
x
x) and ∇ f (y
y
y) are parallel at
the minimum. Because y
y
y ∈ M, and f is an SDF
so ∥∇ f (y
y
y)∥ = 1 where differentiable, thus ∇ f (y
y
y)
T
·
\
(y
y
y −x
x
x) = 1 in this case.
Although the BDF is an SDF in the interior and
on the boundary, it does not automatically inherit its
ease of interoperability with set-theoretic operations.
Let b
1
, b
2
:
R
3
→ R be two BDFs. For union, we
can take the pointwise minimum to bound the values
from below via min(b
1
, b
2
) = x
x
x 7→ min(b
1
(x
x
x), b
2
(x
x
x))
to obtain a BDF of the {b
1
≤ 0}∪{b
2
≤ 0} objects.
However, similar results do not hold for intersection,
complement, or subtraction. That is, the maximum of
two BDFs and the negation of a BDF does not yield
a bound on the BDF of the intersection and comple-
ment operations, even though the minimum as a union
operation yields a correct BDF outside.
4 BACKFACE DISTANCE FIELDS
Let us now consider the problem of generating BDF
values for a grid of samples. At runtime, these sam-
ples are filtered to approximate the BDF. We present
a method that converts various representations to dis-
crete backface distance fields. The algorithm itself is
composed of three stages, as illustrated by Fig. 1: i)
input processing, ii) raw backface distance grid gen-
eration, and iii) backface distance field correction.
Input processing is not necessary for all input
types. It generates data that accelerates closest-point
computations via initial points or geometric proxies.
The BDF generation stage outputs a dense 3D grid
of backface distance values. In general, boundary
traversal and determination of the backfacing prop-
erty are input-type dependent. Alternatively, it may
be carried out on the proxy outputs generated in the
input processing step.
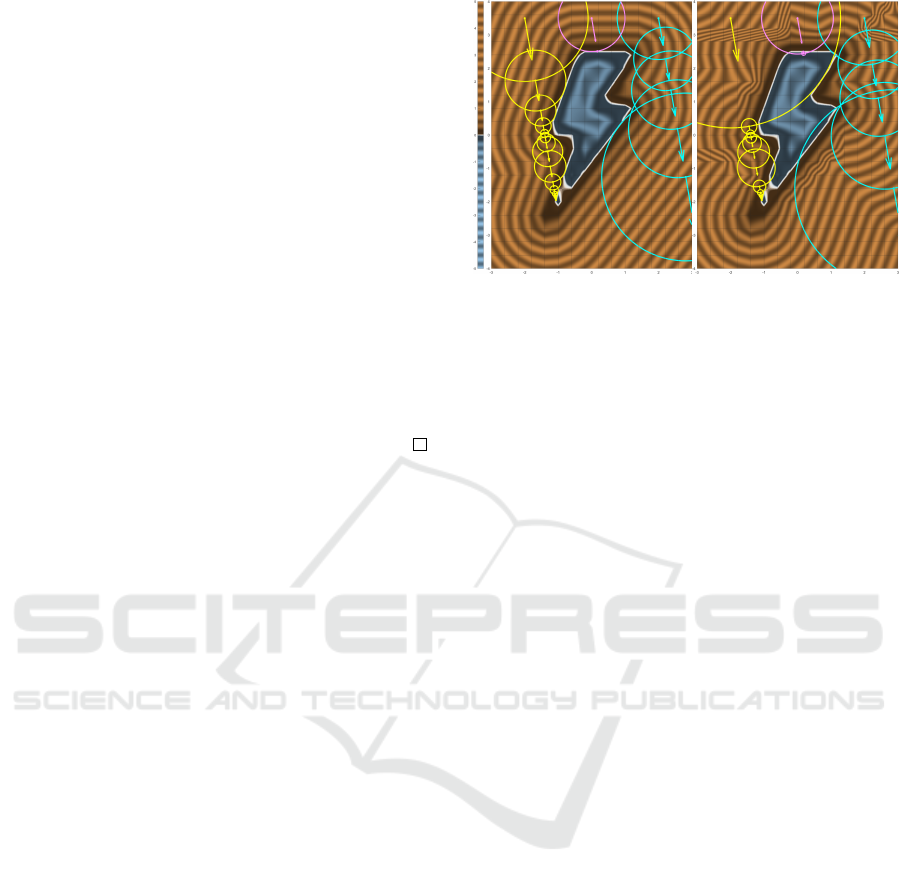
Figure 4: Interpolated SDF (left) and BDF (right) compar-
ison in 2D. The surface and sphere tracing overstep due to
interpolation have been fixed for the BDF.
In the BDF correction stage, the backface dis-
tances are further processed so that interpolation be-
tween samples yields a robustly traceable BDF ap-
proximation.
Since the BDF values can change discontinuously,
the interpolated value of the stored exact samples can
exceed the value of the true analytical BDF at the
evaluation position. This can lead to distance over-
estimation while tracing the interpolated BDF, result-
ing in missing intersections. We solve this problem
by modifying the stored BDF samples such that over-
stepping is prevented using the interpolated values.
We phrase these algorithms in terms of a general
formalism that accommodates a wide variety of input
geometry types. We introduce it next and apply it to
the evaluation of the BDF.
4.1 Evaluating the BDF
The input geometry of the discrete BDF construction
algorithm can be given by general implicit functions,
analytic or discrete SDFs or lower bounds, parametric
surfaces, or triangle meshes. To deal with all these
cases in a concise manner, we introduce the following
notational shorthands.
Let V ⊆ R
3
denote a volume and ∂V ⊆ R
3
its
boundary. For any p
p
p ∈ ∂V , let n
n
n(p
p
p) denote an un-
normalized normal vector. Depending on the type of
input geometry, it may be computed as, for example,
n
n
n(p
p
p) =
∇ f (p
p
p) for an implicit surface
∂
u
r
r
r(u, v) ×∂
v
r
r
r(u, v) for a parametric surface
(b
b
b −a
a
a) ×(c
c
c −a
a
a) for an a
a
a, b
b
b, c
c
ctriangle
(8)
The evaluation of the BDF at an x
x
x ∈ R
3
point is
the solution to
min
n
∥p
p
p −x
x
x∥ | p
p
p ∈ ∂V, n
n
n(p
p
p)
T
·(p
p
p −x
x
x) ≥ 0
o
(9)
Backface Distance Fields: Relaxing Signed Distance Fields
131
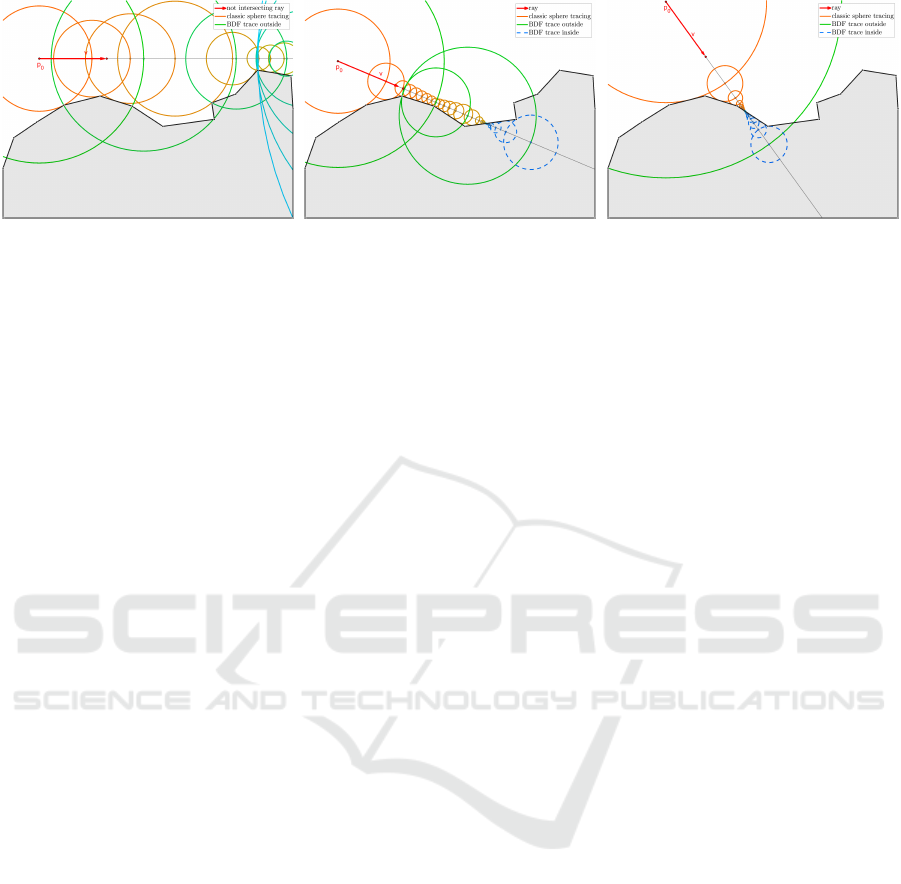
Figure 5: Three cases of tracing the SDF (in red) and the BDF (in green and blue) are displayed. On the left, the ray diverges
to infinity, and our method leaves the frame in half as many steps. On the middle and the right, the ray intersects the surface,
the BDF tracing steps inside and performs sphere tracing backwards to the root, rarely taking more steps (right).
with the sign (−1)
χ
V
(x
x
x)
, where χ
V
(x
x
x) is the charac-
teristic function of V , i.e. χ
V
(x
x
x) = 1 (x
x
x ∈ V ) and
χ
V
(x
x
x) = 0 (x
x
x ̸∈V ).
4.2 Input Processing
The input processing stage augments the input geom-
etry with data that can be used to accelerate closest
point queries.
For implicit and SDF input, our implementation
generates surface point-normal pairs in this stage, and
these samples replace the input function. This ab-
stracts away the input for the next stage at the expense
of precision. These pairs are stored in a linear buffer.
For triangular meshes, we skip this phase and
compute the exact BDF value at each sample position.
However, additional closest point query acceleration
data may be built here, such as bounding volumes or
space partitioning structures.
For parametric boundaries, this stage can gener-
ate a 3D grid where each sample stores a parametric
patch identifier and the (u, v) parameters of the clos-
est surface point to the sample position. Similarly,
for implicit input, the closest boundary points may be
stored. These can be used as initial guesses in the
next stage of the algorithm when looking for the clos-
est analytic backfaces.
4.3 BDF Grid Computation
Let G ⊆R
3
denote the set of discrete field sample po-
sitions defined on a grid. For example, in a grid with
corner g
g
g
0
∈ R
3
, sample spacing ∆
x
, ∆
y
, ∆
z
, and reso-
lution (I + 1) ×(J + 1) ×(K + 1), the grid positions
are
G = {g
g
g
0
+(i∆
x
, j∆
y
, k∆
z
) | i = 0..I, j = 0..J, k = 0..K}.
(10)
Let f [x
x
x] and b[x
x
x] denote sample access for dis-
crete signed and backface distance fields, respec-
tively, where x
x
x ∈ G is a valid sample position. Our
implementation indexes with (i, j, k) from Eq. (10).
Algorithm 1 is an input-agnostic pseudocode for
generating discrete backface distance fields. The al-
gorithm calculates the BDF value at each sample po-
sition x
x
x ∈G.
Inside the object, where f [x
x
x] ≤ 0, the BDF and
SDF values coincide due to Definition 2. Outside the
object, we iterate over all surface primitives and find
the closest backfacing part. In practice, we compute
the minimum of the squared distances and only apply
the square root once at the end.
For implicit input, the primitives are surface sam-
ples in the form of (p
p
p,
b
n
n
n) position-normal pairs from
which the distance is ∥x
x
x − p
p
p∥. A better distance ap-
proximation may be achieved with a closest point
search starting from this sample (Saye, 2014). The
surface sample is backfacing if the normal vector
points away from the grid position: (p
p
p −x
x
x)
T
·
b
n
n
n ≥ 0.
We do not necessarily need a discrete SDF to deter-
mine the sign; the original implicit function can be
used instead. If the signed distances are not known
prior to BDF generation, we can calculate the SDF
values alongside the BDF from the same surface sam-
ples.
4.3.1 Mesh Input
For mesh inputs, the triangle distances (Quilez, 2014)
are calculated with Algorithm 4. Face orientation
is determined according to Eq. (8). When a water-
tight mesh is supplied without its SDF, we calculate it
alongside the BDF. Robust methods exist for sign de-
termination (Baerentzen and Aanaes, 2005), yet ray
casting worked well enough for our test cases.
The interpolation problem is partially solved
within this step. During the generation of positive
BDF values, the backfacing condition is relaxed to
ensure that the interpolation is a lower bound where
the exact BDF has discontinuities. To ensure the cor-
rectness of IsBackFacingPrimitive(x
x
x, s), we have to
check whether the primitive is backfacing from any
point within the cell of x
x
x. The neighborhood that a
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
132

Figure 6: Closest neighbor search kernels for fixing the sur-
face smoothness only (left), for normal calculation with the
forward difference (middle), and for correct normal calcu-
lation with symmetric difference method (right).
grid sample influences during interpolation is
[x
x
x
x
−∆
x
, x
x
x
x
+∆
x
]×[x
x
x
y
−∆
y
, x
x
x
y
+∆
y
]×[x
x
x
z
−∆
z
, x
x
x
z
+∆
z
].
(11)
The backfacing condition for the box is simplified to
checking the farthest cell corner from the plane of the
normal:
c = x
x
x −(sgn(
b
n
n
n
x
)∆
x
, sgn(
b
n
n
n
y
)∆
y
, sgn(
b
n
n
n
z
)∆
z
). (12)
Then IsBackFacingPrimitive(x
x
x, s) = (p
p
p −c
c
c)
T
·
b
n
n
n ≥ 0.
Our BDF generation is implemented in compute
shaders that execute in parallel for each sample on the
GPU. Depending on the input size, the BDF genera-
tion is subdivided into several batches for better com-
puting efficiency. If needed, the consecutive batches
store the intermediate squared minimum distances.
Data: G ⊆R
3
set of grid positions, f
:
G →R
SDF, S set of surface primitives
Result: b
:
G →R backface distance field
forall x
x
x ∈G sample position do
if f [x
x
x] ≤ 0 then
b[x
x
x] ← f [x
x
x];
else
b[x
x
x] ← +∞ ;
forall s ∈S surface primitive do
if IsBackFacingPrimitive(x
x
x, s) then
d ← DistanceToPrimitive(x
x
x, s);
b[x
x
x] ← min(b[x
x
x], d);
end
end
end
end
Algorithm 1: Calculating discrete BDFs (stage 2).
4.4 BDF Correction
The final stage of discrete BDF generation ensures
correct interpolation near the surface. As the true
analytical BDF can have discontinuities or singular-
ities along the surface, the interpolated surface will
be offset and exhibit wrinkles and artifacts along cell
boundaries. The surface is corrected by replacing the
stored larger BDF values with SDF values near the
surface. In Algorithm 2, we replace the stored val-
ues if any of its neighbors are negative. The shapes
and sizes of this neighborhood kernel are visualized
in Fig. 6. When high-quality surface normals are not
required, we may correct within the smallest neigh-
borhood to retain more performance of the BDF. Sur-
face normal calculations rely on numeric differentials
that may become faulty on cell boundaries when the
next cell contains much larger BDF values. We have
to use a larger search kernel for the correct symmetric
and one-sided differentials.
Data: G ⊆R
3
set of grid positions, f
:
G →R
SDF, b
:
G →R backface distance field
Result: b
:
G →R modified BDF
forall x
x
x ∈G sample position do
forall y
y
y ∈NeighbourSamples(x
x
x) do
if f [y
y
y] ≤ 0 then
b[x
x
x] ← f [x
x
x];
break;
end
end
end
Algorithm 2: Correcting discrete BDFs (stage 3).
5 RENDERING BACKFACE
REPRESENTATIONS
The common advantage of analytic and discrete back-
face distance representations is the simplicity of the
rendering algorithm: the sphere tracing algorithm,
listed in Algorithm 3. Since a BDF-sized step may
leap into the volume, the trace then starts going back-
ward via negative stepsizes in a basic sphere tracing
fashion as in Fig. 5.
Data: p
p
p
0
+t
b
v
v
v ray, b
b
b
:
R
3
→ R BDF
Result: t ≥ 0 distance traveled to the first
intersection
t ← 0; i ←0;
repeat
r ← b(p
p
p
0
+t
b
v
v
v);
t ←t + r;
i ←i + 1;
until
|
r
|
< ε or t ≥t
max
or i ≥i
max
;
Algorithm 3: Sphere tracing a BDF.
Due to the interpolation error in the discrete case,
the sphere trace on the inferred SDF might step out-
side once again; however, the interpolation error is
smaller than the cell size. This means that the cor-
rected BDF in that cell equals the SDF and will con-
verge to the trilinear surface. While sphere tracing us-
ing SDFs finds the solution without ever allowing the
tracing to enter the volume, tracing with BDFs often
guides the steps inside the volume and simultaneously
flips the tracing direction. Sphere tracing of the two
Backface Distance Fields: Relaxing Signed Distance Fields
133

Figure 7: Procedural scenes used in our analytic BDF performance tests, including blobs and various primitives.
representations is compared in Fig. 2 for the analytic
case and in Fig. 4 for a 2D discrete BDF field.
Experimental algorithms that explicitly split the
loop into two phases, one for exterior and one for
internal trace, proved to be much slower. Even if
we employ root-finding methods upon the first sign
change, such as bisection or regula-falsi, the per-
formance is lower than the sphere tracing algorithm
above.
A slight modification to the tracing algorithm al-
lows for faster shadow calculation. Since the BDF
guarantees that a sphere tracing step only skips at
most one intersection point, we can stop tracing at
the first sign change. In practice, this means stopping
when r < ε instead of |r| < ε in Algorithm 3.
6 TEST RESULTS
We tested our proposed analytic and discrete BDF
representations in rendering scenarios, and compared
performance statistics to basic (Hart, 1996), relaxed
(Keinert et al., 2014), and enhanced sphere tracing
(B
´
alint and Valasek, 2018), adapting the nomencla-
ture from the latter. Algorithm 3 was used for BDF
rendering. We manually selected a relaxation param-
eter ω = 1.6 for relaxed sphere tracing and ω = 0.88
for enhanced sphere tracing, providing the best speed-
up while retaining geometric accuracy.
We implemented the tracing and generation meth-
ods in the NVIDIA Falcor (Kallweit et al., 2022)
framework in C++ with DirectX 12 backend. We
ran tests on triangular meshes and procedural scenes
adapted from (Takikawa et al., 2022). Measurements
were taken with both AMD and NVIDIA GPUs in a
resolution of 1920 ×1080. The distance fields were
stored in 16-bit half-precision 3D textures. The full
implementation will be released.
6.1 BDF Correction
The samples in a discrete BDF differ from simple
backface distance function evaluations, as shown in
Section 4.3 and Section 4.4 These are necessary be-
cause a raw, unprocessed discrete BDF with runtime
trilinear filtering results in blocky renders, such as
shown in Fig. 1. However, these processing steps also
affect real-time performance considerably.
For the bunny mesh, the processed field was 24%
and 53% slower at 32 and 1000 iterations than the
raw BDF, respectively. The same correction-induced
performance loss ratios for the M
¨
obius strip amounted
to an average of 19% and 41% on Nvidia 2080 and
16% and 35% on AMD RX 5700.
6.2 Performance of Analytic BDFs
Table 1 summarizes our performance measurements
on procedural scenes, shown in Fig. 7. The derivation
and implementation of BDF functions are located in
our Appendix.
Overall, BDF primitives offered minor to modest
performance improvements over their SDF counter-
parts in 85% of our tests. Shadow rays traced the same
type of procedural geometry as the primary traces.
This made BDFs even more efficient in scenes involv-
ing shadows, as our representation guides rays into
the volumes. A distinct exception was the Box scene
which shows the need for a more efficient BDF ap-
proximation to the box primitive. On the other scenes,
BDFs were 7% and 11% more performant on AMD
and Nvidia than SDFs on average using shadows.
We compared the performance of BDF tracing to
Lipschitz segment tracing (Galin et al., 2020) on a
scene adapted from the authors’ ShaderToy sample.
On AMD RX 5700, Lipschitz segment tracing re-
quired 45% of the frame time of sphere tracing while
our method only needed 38%. Lipschitz and BDF
numbers on the Nvidia 2080 GPU are 48% and 40%,
respectively, showing that BDF tracing outperforms
Lipschitz segment tracing on SDF-like implicit func-
tions.
6.3 Performance of Discrete BDFs
First, we measured the render time performance im-
plications of different field sizes, ranging from 64
3
to 512
3
. On the highest resolution, discrete BDFs
are unequivocally more efficient (13-25% on average,
in some cases up to 35%) than basic sphere tracing;
however, the dilation of the SDF area to preserve con-
tours and shading normals severely hinders them at
smaller fields. Consequently, BDF gains are more
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
134

Table 1: Performance comparison of sphere tracing on procedural signed and backface distance functions (SDF and BDF
columns) with and without hard shadows. Shadow rays are traced on the same representation as the primary rays. Timings on
the SDFs are reported in milliseconds, BDF numbers are relative to sphere tracing, and the resolution was 1920 ×1080.
Box Cylinder Primitives Sphere Torus
GPU Shadow SDF BDF SDF BDF SDF BDF SDF BDF SDF BDF
AMD RX 5700 ON 1.517 135% 1.66 99% 3.155 96% 1.285 83% 1.614 93%
OFF 0.683 142% 0.72 110% 1.345 101% 0.555 91% 0.694 96%
NVIDIA 2080 ON 0.93 133% 1.15 83% 1.66 88% 1.07 87% 1.62 97%
OFF 0.4 130% 0.53 96% 0.75 89% 0.38 87% 0.47 81%
Table 2: Frame render times for NVIDIA 2080 Super for three procedural and two triangular mesh scenes with or without
shadows for sphere tracing (ST), relaxed sphere trace (RT) (Keinert et al., 2014), enhanced sphere tracing (ET) (B
´
alint and
Valasek, 2018), and our BDF sphere trace method. Sphere tracing runtimes are in milliseconds, the others are relative to those.
Shadows: off Shadows: on
Scene Steps ST RT ET BDF ST RT ET BDF
Spheres 32 0.43 105% 109% 86% 0.66 105% 114% 85%
1000 0.77 92% 93% 77% 1.14 87% 89% 75%
Gears 32 0.28 104% 104% 89% 0.39 103% 105% 87%
1000 0.37 92% 89% 86% 0.5 90% 90% 84%
Mountain 32 0.36 100% 106% 78% 0.55 93% 104% 75%
1000 0.49 86% 96% 71% 0.67 84% 96% 72%
Bunny mesh 32 0.25 100% 100% 88% 0.33 101% 102% 86%
1000 0.32 92% 86% 86% 0.39 92% 90% 85%
Skull mesh 32 0.23 104% 104% 91% 0.31 106% 106% 90%
1000 0.45 84% 82% 89% 0.51 88% 94% 90%
modest (7-11%) at the smallest resolutions.
For the performance comparison between ba-
sic, enhanced, relaxed, and BDF sphere tracing, we
choose the resolution of 128
3
. We computed exact
BDF fields for mesh inputs and approximate ones for
procedural SDFs. BDF generation times at this res-
olution were between 0.5-80 seconds on both GPUs,
depending on the input geometry. For meshes, SDF
and BDF generation times were effectively identi-
cal. The measurements in Table 2 were taken at
1920 ×1080 resolution. We recorded timings at low
(32) and high (1000) iteration limits.
BDFs performed significantly better on fields gen-
erated from procedural inputs (19% and 22% faster on
average than sphere tracing with and without shad-
ows on both AMD RX 5700 and Nvidia 2080 Su-
per, respectively) compared to mesh inputs (9% and
12% faster with and without shadows on the AMD
GPU, 12% for both on the Nvidia card). At high iter-
ation counts, relaxed and enhanced sphere tracing ap-
proached or occasionally outperformed BDF traces,
the latter occurring 3.125% of the times in our tests.
The tests showed that high-resolution fields mask
the performance implications of dilating the SDF re-
gion within the discrete BDFs. This is explained by
the smaller absolute volumes on which the SDF is re-
instated. Even with our representation, the silhouettes
are hotspots for iterations, but much less so.
However, note that performance also drops due
to the more conservative backface selection property
that takes into account the filtering footprint when
selecting prospective backfaces. Further research is
needed to identify if the gap between raw and cor-
rected discrete BDFs can be narrowed by different
processing at generation time or by other filtering
techniques beyond trilinear at runtime.
7 CONCLUSIONS
We proposed a new volumetric representation, back-
face distance functions. These constructs compute
the signed distances to the closest backfaces and ef-
ficiently resolve ray-surface intersections.
We investigated the mathematical properties of
backface distance functions and proved that they pro-
vide a complete geometric description of the scene
without any additional data. We presented procedu-
ral backface distance functions for various primitives
and derived a discrete realization that takes filtering
into account.
We proposed a three-stage algorithm to gener-
ate exact and approximate discrete backface distance
fields from triangular mesh and procedural implicit
inputs. The main contribution here is how we pre-
Backface Distance Fields: Relaxing Signed Distance Fields
135

serve the same silhouette and shading normal as a dis-
crete signed distance field via additional processing
steps.
Our performance tests showed that tracing on our
analytic and discrete representations is more efficient
than various trace methods on signed distance func-
tions and fields. Our representation is almost matched
or slightly outperformed by the other algorithms at
very high iteration count limits for a limited set of
inputs. However, this also shows that the shape-
preservation steps hinder the acceleration potential of
backface distance fields. We verified this with mea-
surements that up to 41% performance gain is lost
compared to raw backface distance fields. Neverthe-
less, in general, tracing on our representation con-
verges faster initially, requiring fewer iterations than
the other methods.
Further research is required to mitigate the perfor-
mance loss due to discrete backface distance field cor-
rection, either via generation-time processing or run-
time filtering. Similarly, procedural backface distance
function approximations to the results of intersection
and complement set-theoretic operations are subject
to future work.
REFERENCES
Akleman, E. and Chen, J. (2003). Constant Time Update-
able Operations for Implicit Shape Modeling.
Angles, B., Tarini, M., Wyvill, B., Barthe, L., and
Tagliasacchi, A. (2017). Sketch-based Implicit Blend-
ing. ACM Transactions on Graphics, 36(6):1–13.
Aydinlilar, M. and Zanni, C. (2023). Forward inclusion
functions for ray-tracing implicit surfaces. Comput-
ers & Graphics, 114:190–200.
Baboud, L., Eisemann, E., and Seidel, H.-P. (2012). Pre-
computed Safety Shapes for Efficient and Accurate
Height-Field Rendering. IEEE Transactions on Visu-
alization and Computer Graphics, 18(11):1811–1823.
Baerentzen, J. and Aanaes, H. (2005). Signed Distance
Computation Using the Angle Weighted Pseudonor-
mal. IEEE Transactions on Visualization and Com-
puter Graphics, 11(3):243–253.
Bajaj, C., Blinn, J., Cani, M.-P., Rockwood, A., Wyvill, B.,
and Wyvill, G. (1997). Introduction to Implicit Sur-
faces. Morgan Kaufmann Publishers Inc., San Fran-
cisco, CA, USA.
B
´
alint, C. and Valasek, G. (2018). Accelerating Sphere
Tracing. In EG 2018 - Short Papers, page 4 pages,
Delft, Netherlands. The Eurographics Association.
B
´
alint, C., Valasek, G., and Gerg
´
o, L. (2019). Opera-
tions on Signed Distance Functions. Acta Cybernet-
ica, 24(1):17–28.
B
´
an, R., Valasek, G., B
´
alint, C., and Vad, V. A. (2024). Ro-
bust cone step mapping. In Haines, E. and Garces, E.,
editors, Eurographics symposium on rendering. The
Eurographics Association. ISSN: 1727-3463.
Dummer, J. (2006). Cone Step Mapping: An Iterative Ray-
Heightfield Intersection Algorithm.
Evans, A. (2015). Learning from Failure: a Survey of
Promising, Unconventional and Mostly Abandoned
Renderers for ’Dreams PS4’, a Geometrically Dense,
Painterly UGC Game. In Advances in Real-Time Ren-
dering in Games. SIGGRAPH, MediaMolecule.
Fuhrmann, A., Sobotka, G., and Groß, C. (2003). Distance
fields for rapid collision detection in physically based
modeling. International Conference Graphicon 2003.
Galin, E., Gu
´
erin, E., Paris, A., and Peytavie, A. (2020).
Segment Tracing Using Local Lipschitz Bounds.
Computer Graphics Forum, 39(2):545–554.
Green, C. (2007). Improved Alpha-tested Magnification
for Vector Textures and Special Effects. In ACM
SIGGRAPH 2007 courses on - SIGGRAPH ’07, SIG-
GRAPH ’07, pages 9–18, San Diego, California.
ACM Press.
Hart, J. C. (1996). Sphere Tracing: A Geometric Method
for the Antialiased Ray Tracing of Implicit Surfaces.
The Visual Computer, 12(10):527–545.
Kallweit, S., Clarberg, P., Kolb, C., Davidovi
ˇ
c, T., Yao,
K.-H., Foley, T., He, Y., Wu, L., Chen, L., Akenine-
M
¨
oller, T., Wyman, C., Crassin, C., and Benty, N.
(2022). The Falcor Rendering Framework.
Kalra, D. and Barr, A. H. (1989). Guaranteed Ray Inter-
sections with Implicit Surfaces. In 16th Annual Con-
ference on Computer Graphics and Interactive Tech-
niques, SIGGRAPH ’89, pages 297–306, New York,
NY, USA. Association for Computing Machinery.
Keinert, B., Sch
¨
afer, H., Kornd
¨
orfer, J., Ganse, U., and
Stamminger, M. (2014). Enhanced Sphere Tracing.
In Smart Tools and Apps for Graphics - Eurographics
Italian Chapter Conference, page 8 pages. The Euro-
graphics Association.
Luo, H., Wang, X., and Lukens, B. (2019). Variational
Analysis on the Signed Distance Functions. Journal of
Optimization Theory and Applications, 180(3):751–
774.
Ohtake, Y., Belyaev, A., and Pasko, A. (2001). Dynamic
meshes for accurate polygonization of implicit sur-
faces with sharp features. In International Conference
on Shape Modeling and Applications, pages 74–81,
Genova, Italy. IEEE Computer Society.
Osher, S. and Fedkiw, R. (2003). Signed Distance Func-
tions. In Antman, S. S., Marsden, J. E., and Sirovich,
L., editors, Level Set Methods and Dynamic Implicit
Surfaces, volume 153, pages 17–22. Springer New
York, New York, NY. Series Title: Applied Mathe-
matical Sciences.
Policarpo, F. and Oliveira, M. M. (2007). Relaxed Cone
Stepping for Relief Mapping. In GPU Gems 3.
Quilez, I. (2014). Distance to a Triangle.
Saye, R. (2014). High-order methods for computing dis-
tances to implicitly defined surfaces. Communications
in Applied Mathematics and Computational Science,
9(1):107–141.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
136

Szirmay-Kalos, L. and Umenhoffer, T. (2008). Displace-
ment Mapping on the GPU - State of the Art. Com-
puter Graphics Forum, 27(6):1567–1592.
Takikawa, T., Glassner, A., and McGuire, M. (2022). A
Dataset and Explorer for 3D Signed Distance Func-
tions. Journal of Computer Graphics Techniques
(JCGT), 11(2):1–29.
Wright, D. (2015). Dynamic Occlusion with Signed Dis-
tance Fields. Epic Games (Unreal Engine).
APPENDIX
Analytic Backface Distance Functions
In this section, we list some of the analytic backface
distance primitives along with their SDF counterparts
when evaluating at an x
x
x = [x, y, z]
T
query point.
Unit Sphere
We have to calculate the length of a segment tangen-
tial to the sphere from the x
x
x query point.
SDF: f (x
x
x) = ∥x
x
x∥−1
BDF: b(x
x
x) =
(
p
∥x
x
x∥
2
−1 if f (x
x
x) > 0
f (x
x
x) if f (x
x
x) ≤ 0
The difference between the BDF and the SDF for the
sphere is
b
sphere
(x
x
x) − f
sphere
(x
x
x) =
q
∥x
x
x∥
2
−1 −∥x
x
x∥+ 1,
where ∥x
x
x∥ > 1. This difference approaches 1 as
∥x
x
x∥ → ∞. In practice, tracing a BDF takes larger
steps by the sphere radius but slows down near the
surface because of local concavity. However, the
slowdown near the surface is much smaller because
lim
∥x
x
x∥→0
b(x
x
x)
f (x
x
x)
= +∞.
Infinite Cylinder
The equation for the cylinder is the same, except that
it only needs two dimensions.
(a) Finite cylinder (b) Torus
Figure 8: Geometry of the BDF and its construction for the
two primitives. The green surface on the finite cylinder is
the backface surface set B
f
(x
x
x) as seen from query point x
x
x.
SDF: f (x, y, z) =
p
x
2
+ y
2
−1
BDF: b(x, y, z) =
(
p
x
2
+ y
2
−1 if f (x, y, z) > 0
f (x, y, z) if f (x, y, z) ≤ 0
The formula for the finite cylinder is more involved.
Figure 8a aids with interpreting the source code.
Infinite Cone
The cone is similar to the cylinder, the radius changes
with the z coordinate. From now on, we always as-
sume that b(x, y, z) = f (x, y, z) when f (x, y, z) < 0, so
we only list when f (x, y, z) > 0.
SDF: f (x, y, z) =
√
x
2
+y
2
−ztan α
1+tan
2
α
BDF: b(x, y, z) =
p
x
2
+ y
2
−(z tan α)
2
Torus
The BDF of the torus is visualized in Fig. 8b.
SDF: f (x, y, z) =
r
p
x
2
+ y
2
−R
2
+ z
2
−r
BDF: b(x, y, z) =
p
x
2
+ y
2
−R
2
+ z
2
−r
Data: G ⊆ R
3
set of grid positions, and T set of
triangles, d
d
di
i
ir
r
r = [1, 0, 0]
T
arbitrary direction
for sign determination
Result: f
:
G →R signed distance field, and
b
:
G →R backface distance field
forall x
x
x ∈G sample position do
b2 ←+∞;
f 2 ← +∞;
sign ←1;
forall t ∈ T triangle do
d2 ←SquaredDistanceToTriangle(x
x
x,t);
f 2 ← min( f 2, d2) ;
if IntersectTriangle(x
x
x, d
d
di
i
ir
r
r, t) then
sign ←−sign ;
end
if IsBackFacingTriangle(x
x
x,t) then
b2 ←min(b2, d2) ;
end
end
f [x
x
x] ← sign ·
√
f 2;
b[x
x
x] ← sign ·
√
b2;
end
Algorithm 4: Calculating SDF and BDF for a mesh.
Plane
The BDF values of a plane with unit normal
b
n
n
n ∈ R
3
are infinite throughout the whole positive half-space
because the surface has no backfaces viewed from
there. We rectify this by setting an arbitrary value in
Backface Distance Fields: Relaxing Signed Distance Fields
137
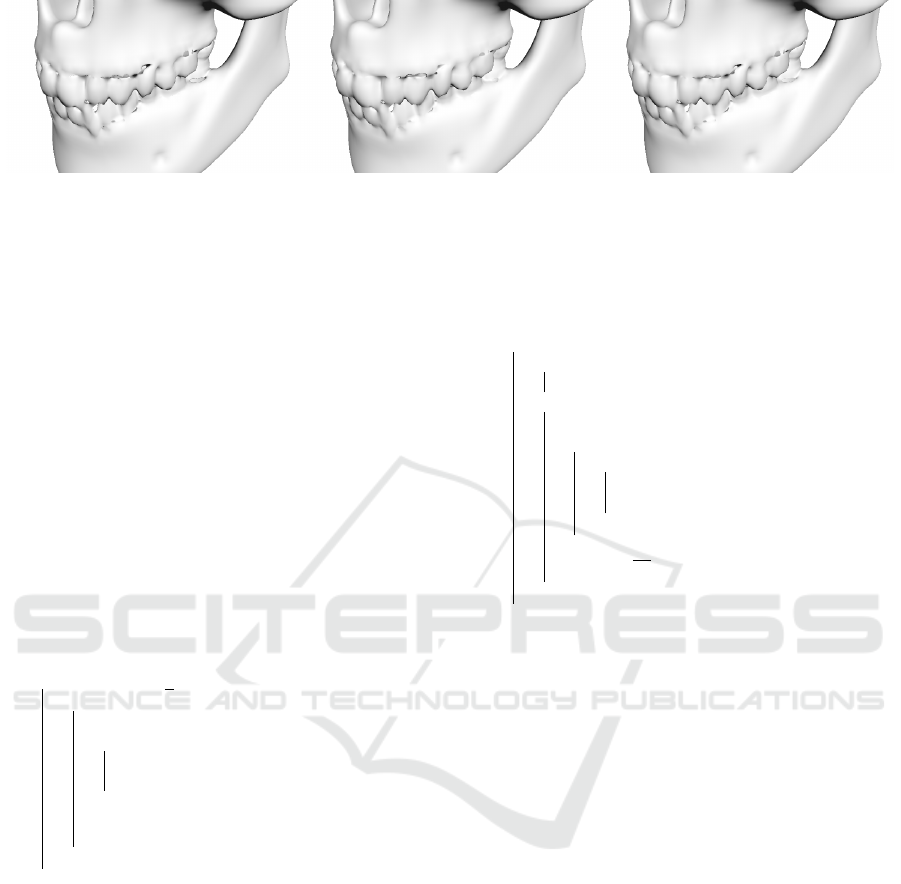
(a) SDF. (b) Non-conservative BDF. (c) Conservative BDF.
Figure 9: Comparison of baseline SDF (left) to post-processed but non-conservatively (center) and conservatively (right)
generated 128
3
BDFs.
the following shader code to allow the sphere tracing
to trace backward from there. Due to the sphere trac-
ing slowdown near the surface, this change is actually
much faster than the regular SDF plane, especially if
the horizon is in view.
SDF: f (x
x
x) = x
x
x
T
·
b
n
n
n
BDF: b(x
x
x) =
+∞ if f (x
x
x) > 0
f (x
x
x) if f (x
x
x) ≤ 0
Data: c
c
c ∈R
3
starting grid corner, (I, J, K) ∈ N
3
grid resolution, ∆ ∈ R
+
grid spacing,
f
:
R
3
→ R SDF, ρ ∈ (0, 1] search step
relaxation
Result: S ⊆ R
3
×R
3
set of position-normal pairs
(surface samples)
S ←
/
0;
forall p
p
p ∈{c
c
c + ∆ ·[i, j, k]
T
|0 ≤ i < I, 0 ≤ j <
J, 0 ≤k < K} do
if |f (p
p
p)| ≤
√
3 ·∆ then
q
q
q ← p
p
p; m = 0 ;
while |f (q
q
q)| > ε ∧m < m
max
do
q
q
q ←q
q
q −ρ · f (q
q
q) ·∇ f (q
q
q);
m ←m + 1;
end
S ←S ∪
n
q
q
q, ∇ f (q
q
q)
o
;
end
end
Algorithm 5: Surface sample generation from SDF.
General Construction Algorithm
Algorithm 4 calculates both the SDF and the BDF
from a mesh, while Algorithms 5 and 6 generates
BDF from SDF through surface samples. In practice,
the visual difference is negligible between the SDF
and the corrected BDF because both use the same
tracing algorithm as demonstrated on Fig. 9.
BDF Tracing Variant
In practice, we often employ the robust variant of
BDF sphere tracing seen in Algorithm 3. In addition
to the usual termination condition, this method also
Data: G ⊆ R
3
set of grid positions, f
:
G →R
SDF, S ⊆ R
3
×R
3
set of surface samples
Result: b
:
G →R backface distance field
forall x
x
x ∈G sample position do
if f [x
x
x] ≤ 0 then
b[x
x
x] ← f [x
x
x];
else
b2 ←+∞ ;
forall (p
p
p, n
n
n) ∈ S position-normal pair do
if IsBackFacingSample(x
x
x, p
p
p, n
n
n) then
d2 ←∥p
p
p −x
x
x∥
2
;
b2 ←min(b2, d2) ;
end
end
b[x
x
x] ←
√
b2;
end
end
Algorithm 6: Calculating BDF for an SDF.
terminates when the BDF changes sign during the
backward sphere tracing. The advantage is that this
method converges even if the BDF was not corrected.
The BDF texture lookup completely hides the time
it takes to evaluate the additional condition, thus the
render times for the two variants were exactly equal.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
138
