
Integrating 5G into VANETs: Methodological Approaches and
Performance Evaluation Through Simulation
Nouri Omheni, Mazen Sboui and Faouzi Zarai
NTS’Com Research Unit, National School of Electronics and Telecommunications of Sfax, University of Sfax, Tunisia
Keywords: 5G Technology, VANETs, Intelligent Transportation Systems, end to end Latency, Packet Loss.
Abstract: The integration of 5G technology with Vehicular Ad-hoc Networks (VANETs) represents a significant
advancement in the field of Intelligent Transportation Systems (ITS). This paper explores the potential of 5G
to enhance real-time communication between vehicles and infrastructure, aiming to improve road safety and
traffic management. Using simulation tools such as OMNeT++ and SUMO, various traffic scenarios were
modeled to assess the performance of the integrated 5G-VANET system. Key performance indicators
including end to end latency, packet loss, and node acceleration behaviour were evaluated. The results indicate
that the integration of 5G reduces communication latency to below 10 milliseconds and achieves packet
delivery rates exceeding 95% in high-density traffic situations. This study demonstrates the feasibility of 5G-
enhanced VANETs, highlighting their potential to contribute to safer and smarter transportation systems.
1 INTRODUCTION
The transportation sector is undergoing a
transformative shift with the integration of emerging
communication technologies aimed at improving
road safety, reducing traffic congestion, and
supporting autonomous vehicle operations. Vehicular
Ad-hoc Networks (VANETs) (Balen, 2022), a subset
of Mobile Ad-hoc Networks (MANETs), play a
crucial role in this transformation by enabling real-
time communication between vehicles (V2V) and
between vehicles and roadside infrastructure (V2I).
VANETs allow for the exchange of critical
information such as vehicle position, speed, and
traffic conditions, which are essential for safety
applications like collision avoidance, emergency
vehicle routing, and traffic flow optimization.
However, existing communication networks such as
4G LTE are unable to fully meet the stringent
requirements of modern VANET applications,
particularly in terms of latency, bandwidth, and
connection density. The emergence of Fifth
Generation (5G) mobile networks (Banafaa, 2024) is
seen as a game-changer for vehicular communication
systems. 5G networks provide ultra-reliable low-
latency communication (uRLLC), enhanced mobile
broadband (eMBB), and massive machine-type
communication (mMTC), all of which are critical for
supporting the complex and dynamic environment of
VANETs. These features enable faster data
transmission, improved reliability, and the ability to
connect a vast number of devices, making 5G the
ideal network for supporting intelligent transportation
systems (ITS).
One of the key challenges in vehicular networks
is maintaining reliable and low-latency
communication, especially in high-speed
environments where vehicles frequently enter and
leave communication ranges. 5G's low-latency
features are designed to address this issue by enabling
real-time communication between vehicles and
infrastructure, which is vital for applications such as
cooperative collision avoidance and autonomous
driving. Moreover, 5G's ability to support dense
networks with numerous connected devices ensures
that VANETs can operate efficiently even in high-
traffic areas. As the number of vehicles on the road
continues to increase, the limitations of current
communication technologies become more apparent.
4G LTE networks, while adequate for many
applications, struggle to support the high-speed, low-
latency communication required by safety-critical
vehicular applications. The main challenges
addressed by this project are:
Network Scalability: In dense urban
environments, the number of connected vehicles
Omheni, N., Sboui, M. and Zarai, F.
Integrating 5G into VANETs: Methodological Approaches and Performance Evaluation Through Simulation.
DOI: 10.5220/0013253900003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 405-412
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
405

and devices places a heavy burden on the
network, leading to congestion and packet loss.
Traditional networks cannot scale effectively to
meet this demand.
Reliability: Vehicular communication must be
reliable, even in challenging environments such
as tunnels, urban canyons, and high-speed
highways. Ensuring consistent connectivity and
data transmission in these environments is
critical.
The problem, therefore, lies in finding a way to
enhance VANET communication by leveraging 5G’s
capabilities to provide faster, more reliable data
exchange and ensure network performance, even in
the most demanding conditions.
Various approaches to enhance communication
performance and reliability in vehicular networks
have been conducted. To maintain optimal traffic
flow, a swarm intelligence-based method was
developed to support the formation and evolution of
platoons (Mushtaq, 2021). A fuzzy logic-based
weighting model was introduced to prioritize vehicles
in traffic (Abbasi, 2022), and a 3D road network
model using digital surface models was developed to
support multi-level communications (Brummer,
2019). Authors in (Irani, 2024)] present VSIM, a new
simulator for MANET and ad hoc networks that
balances user-friendliness, modularity, scalability,
and open-source accessibility, providing accurate,
reliable results validated against NS-2 and supporting
a range of routing protocols, mobility models, and
performance evaluation tools. Project (Taher, 2024)
evaluates the use of the software-defined network
(SDN) protocol with AODV and OLSR protocols in
LTE-based VANETs, demonstrating that SDN
enhances packet delivery ratio (PDR) and reduces
delivery delay by leveraging SDN controllers for
optimal routing, outperforming AODV and OLSR in
varying vehicle densities and speeds. Paper (Zanotto,
2024) extends the Veins vehicular network simulator
to incorporate 3D factors—such as building height,
obstacles, altitude, and antenna positioning
improving the accuracy of mobile network coverage
assessments with only a limited increase in simulation
time.
Our research focuses on the integration of 5G with
VANET technologies, aiming to enhance vehicular
communication systems by leveraging the advanced
capabilities of 5G networks. The study adopts the V-
model for the development and validation of the
integrated system, ensuring a structured approach that
includes rigorous testing at each phase of the project.
Through extensive simulations, this research
evaluates key performance indicators (KPIs) such as
end to end latency, packet loss, and node acceleration
behaviour, providing insights into the benefits of 5G-
enhanced VANET systems under various traffic
scenarios. To address these challenges, the project
proposes the integration of 5G networks into VANET
systems, focusing on improving the reliability and
speed of vehicular communication. The proposed
solution includes the following components:
On-Board Units (OBUs) and Roadside Units
(RSUs): Vehicles equipped with OBUs will
communicate with RSUs using 5G-enabled
protocols, ensuring that data can be exchanged
quickly and reliably, even in high-speed
environments. These units will handle critical
data such as vehicle speed, position, and
trajectory to enable safety applications.
uRLLC: 5G's uRLLC feature will be employed
to minimize latency, ensuring that vehicles can
share real-time data, such as accident warnings
or traffic updates, almost instantaneously. This
is essential for applications such as cooperative
adaptive cruise control (CACC), where vehicles
must react to changes in road conditions or
traffic behaviour in real time.
Scenario Testing and Evaluation: The system
will be tested in simulated environments to
evaluate how it performs in different scenarios.
For example, high-density urban traffic,
freeway driving, and emergency vehicle routing
will be simulated to assess the system’s ability
to maintain low latency and high throughput
under various conditions.
The rest of this paper is organized as follows:
Section 2 presents the methodological approach used
in this study, detailing the V-model and justifying its
selection over other methodologies such as Scrum.
Section 3 describes the simulation setup, tools and
presents the results of the simulations, analyzing the
performance of the 5G-VANET system under
different conditions. Finally, Section 4 concludes the
paper with a summary of the findings and suggestions
for future research directions.
2 METHODOLOGY
2.1 Methodological Approach
For this project, two software development
methodologies were considered: The V-model and
Scrum. The V-model, also known as the Verification
and Validation model, is a highly structured approach
that requires sequential development. Each phase of
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
406

development has a corresponding testing phase,
ensuring that any issues are identified and resolved
before moving to the next stage. This approach is
particularly well-suited for projects with stable
requirements and where quality and accuracy are
paramount. In contrast, Scrum is an Agile
methodology that focuses on iterative development,
promoting flexibility and collaboration among team
members. Scrum is better suited for projects with
evolving requirements, allowing for rapid
adjustments and continuous delivery of working
software. Given the stable and well-defined
requirements of the VANET and 5G integration, the
V-model’s sequential approach offers better accuracy
and ensures high-quality deliverables. Although
Scrum is widely used in modern software
development, its flexibility is not required for this
project, and the additional overhead of iterative
cycles would not provide significant benefits.
Therefore, the V-model was deemed more suitable
for ensuring that all critical phases were carefully
tested and validated before moving to the next.
2.2 VANET Implementation
Implementing VANETs with 5G technology comes
with its own set of challenges, scenarios, routing
protocols, and security concerns.
2.2.1 Challenges
While the integration of 5G into VANETs offers
numerous benefits, several challenges must be
addressed:
• Network Stability: Maintaining stable
connections in high-speed and rapidly changing
environments is difficult due to vehicles moving
in and out of communication range frequently.
• Data Privacy and Security: Ensuring secure
communication between vehicles and
infrastructure is crucial, as malicious attacks
could compromise safety. Security measures must
be robust enough to protect against data breaches
and unauthorized access.
• Interoperability: As different manufacturers
develop their own communication standards,
achieving interoperability between various
systems is essential for seamless integration.
2.2.2 Scenarios
Various scenarios can be simulated to evaluate the
effectiveness of VANETs in real-world conditions:
• Urban Traffic Management: Scenarios involving
dense urban environments where vehicles must
navigate through heavy traffic and communicate
with traffic signals to optimize flow.
• Emergency Response: Simulations of emergency
vehicles utilizing V2V and V2I communication to
navigate through traffic quickly, reducing
response times in critical situations.
• Highway Driving: Evaluating the performance of
vehicles in high-speed environments to ensure
that communication remains stable and reliable
during rapid vehicle movement.
3 IMPLEMENTATION AND
RESULTS
This section covers the tools, environment setup, and
results from the simulation of vehicular networks
using 5G technology. The simulation was
implemented with SUMO (SUMO, 2024) for traffic
simulation, OMNeT++ (OMNeT, 2024) for network
simulation, and Veins (VEINS, 2024)
for VANET
simulation, deployed on the Cloud.
3.1 Environment Setup and Tools
The simulation environment was built using a
combination of hardware and software tools.
Hardware included an Intel Core i5 processor with
16GB RAM. Key software components used:
OMNeT++: A modular C++ simulation library for
building network simulators, used for handling
discrete event simulations.
Veins: A framework for simulating VANETs,
integrated with OMNeT++ and SUMO.
INET Framework: Used for simulating
communication networks, protocols, and
applications.
SUMO: A traffic simulation package that provides
accurate road traffic models.
JOSM: An application for editing and extracting
maps for use with SUMO to generate realistic traffic
models (JOSM, 2024).
3.2 Work Environment Configuration
The simulation environment required the installation
and configuration of OMNeT++ and the Veins/INET
framework. Steps involved extracting files, importing
projects into OMNeT++, and configuring various
project references. Veins and INET were crucial for
Integrating 5G into VANETs: Methodological Approaches and Performance Evaluation Through Simulation
407
simulating vehicular communication with 5G
capabilities. Veins was used to simulate vehicle
communication protocols (V2X), focusing on ultra-
reliable low-latency communication (uRLLC). INET
provided a broader range of protocols and
performance evaluation tools for testing the
throughput, latency, and packet loss in 5G networks.
3.3 AODV Integration with Veins
The simulation incorporated the AODV routing
protocol to manage vehicle-to-vehicle
communication. This required configuration of INET
and Veins to enable seamless operation in the
OMNeT++ environment. The protocol was
configured in the omnetpp.ini file, and its behaviour
was tested under various traffic and accident
scenarios. The following points show the cade
enabling the integration of AODV in routing for
nodes with :
*
node[*].ipv4.configurator.typename =
"HostAutoConfigurator": Specifies that IPv4
addresses will be automatically configured for each
node.
*.node[*].ipv4.configurator.interfaces =
"wlan0": Specifies the interface to be used for IPv4
configuration.
*.node[*].ipv4.configurator.mcastGroups =
"224.0.0.1": Configures multicast groups for IPv4.
Mobility:
*.node[*].mobility.typename =
"VeinsInetMobility": Configures mobility using the
Veins framework with INET mobility support.
*.manager.updateInterval = 0.1s: Sets the update
interval for the VeinsInetManager.
*.manager.host = "localhost": Specifies the host
for the manager.
*.manager.port = 9999: Specifies the port for
communication.
*.manager.autoShutdown = true: Enables
automatic shutdown of the manager.
*.manager.launchConfig =
xmldoc("square.launchd.xml"): Specifies the launch
configuration file for the manager.
*.manager.moduleType =
"vanettutorials.veins_inet.VeinsInetRoutingCar":
Specifies the module type for the manager. Vector
Recording:
**.vector-recording = true: Enables vector
recording for the simulation. Routing:
**.router = "Aodv": Specifies the routing
protocol to be used. Here, it’s set to
AODV
3.4 Collision Avoidance Simulation
An accident scenario was introduced in the
simulation, focusing on the behaviour of nodes
(vehicles) during an accident. Node 5 was set to
simulate an accident, affecting its communication and
network performance. The impact of this accident
was analyzed, particularly in terms of packet loss and
deceleration behaviour. In the accident scenario
involving Node 5, communication delays led to the
late transmission of emergency braking messages to
nearby vehicles. This delay caused increased reaction
times, resulting in near-collision events for vehicles
within a 50-meter radius. After integrating the AODV
protocol now we are looking for nodes behaviour
when an accident occurs:
Node 5 experiences an accident which impacts the
network performance and traffic flow. This scenario
is critical for evaluating the robustness and reliability
of the vehicular network under emergency conditions.
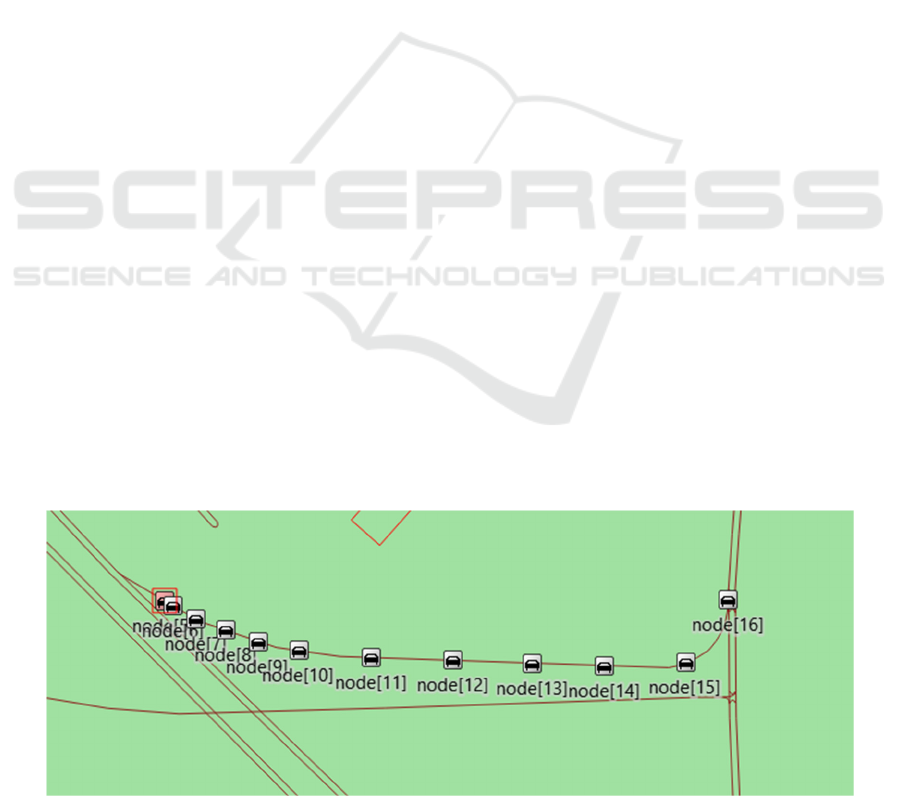
As shown in Figure 1, node 5 is depicted in red to
indicate that an accident has occurred at this location.
The red color is used to highlight the status of Node
5, making it immediately recognizable as a critical
event in the simulation. This visual representation
helps in quickly identifying nodes that are involved in
Figure 1: Node 5 has experienced an accident.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
408
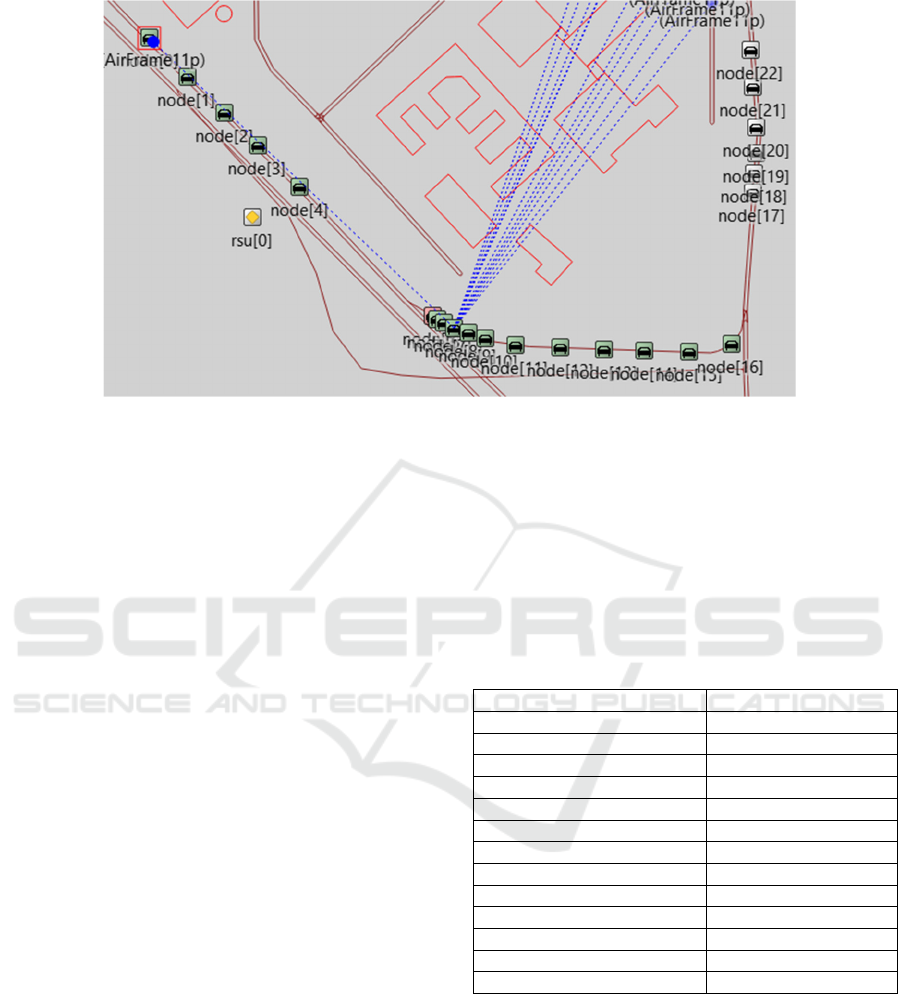
Figure 2: RSU Communicating with nodes.
accidents, allowing for a more efficient analysis of
how such incidents impact network performance and
traffic flow
.
After running the simulation, the nodes turn green
due to successful communication with the RSU. The
green color indicates that the nodes are receiving
signals and exchanging data with the RSU,
confirming active participation in the vehicular
network as depicted in figure 2.
3.5 Simulation Parameters
Key simulation parameters included the playground
size, node behaviour during accidents, transmission
power, and noise floor. Table 1 outlines the key
parameters used in the simulation. The playground
size is set to 2500 meters in both the X and Y
directions and 50 meters in the Z direction. Node [5]
is configured to experience an accident starting at 73
seconds into the simulation and lasting for 50
seconds. The network configuration does not use the
service channel, and the nodes transmit with a power
of 20 milliwatts at a bit rate of 6 Mbps. The minimum
power level for the physical layer is set to -110 dBm,
and noise floor usage is enabled with a value of -98
dBm. The decider and analogue models are specified
through XML configurations.
3.6 Simulation Results
In this section, we conduct a detailed analysis of the
packet behaviour during accidents. The data reveals
that accidents significantly impact packet
transmission, resulting in increased packet loss and
fluctuations in packets sent. This analysis is crucial
for understanding and improving the robustness of
VANET systems in real-world scenarios.
3.6.1 Total Distance
The bar plot of the Figure 3 depicts the total distance
for each module. Key insights include:
Table 1: Simulation Parameters.
Parameter Value
Pla
yg
round Size
(
X
)
2500m
Pla
yg
round Size
(
Y
)
2500m
Pla
yg
round Size
(
Z
)
50m
Node[5] Accident Count 1
Node[5] Accident Start 73s
Node[5] Accident Duration 50s
Use Service Channel false
Transmission Powe
r
20mW
Bitrate 6Mbps
Minimum Power Level -110dBm
Use Noise Floo
r
true
Noise Floo
r
-98dBm
Use Pro
p
a
g
ation Dela
y
true
There is a noticeable variation in the total distance
covered by different nodes.
Some nodes cover significantly higher distances,
which could indicate specific roles or activities
within the experiment that require more extensive
movement.
nodes with lower distances might be involved in
more static or localized tasks.
The plot allows for easy comparison across nodes,
highlighting which nodes are outliers in terms of
distance covered.
Integrating 5G into VANETs: Methodological Approaches and Performance Evaluation Through Simulation
409
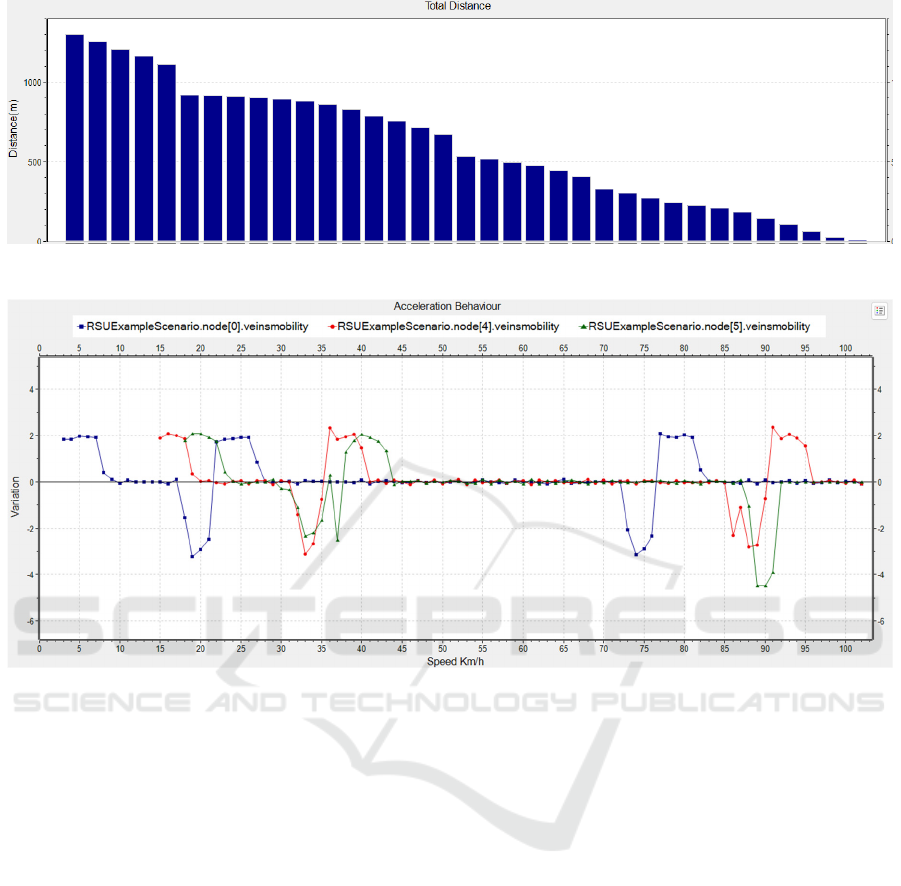
Figure 3: Total distance for each module.
Figure 4: Acceleration Behaviour for nodes when the accident happens.
3.6.2 Acceleration Behaviour
Figure 4 delineates the graphical representation when
the nodes had and accident and their behaviour before
and after the accident. The behaviour of each node
can be understood through their acceleration profiles.
Nodes with high deceleration and variability, such as
Node 5, are likely facing significant obstacles or
events that force them to slow down frequently,
potentially leading to packet loss due to unstable
connectivity. In contrast, nodes with positive or stable
mean acceleration and lower variability maintain
more consistent speeds, resulting in better network
performance and fewer packet loss incidents.
3.6.3 Insights
Node 0 has the highest average acceleration and
also exhibits the highest maximum acceleration
value, indicating more significant speed changes
compared to the other nodes.
Node 5 and Node 6 have similar mean
accelerations, which are slightly negative,
suggesting that on average, these nodes might be
decelerating slightly more often than accelerating.
The standard deviations indicate that the
accelerations of all nodes fluctuate significantly,
with Node 5 showing the highest variability.
The minimum acceleration values for all nodes
are quite similar, with Node 5 showing the lowest
minimum value, which indicates a significant
deceleration event.
These statistics and the visual representation
provide insights into the behaviour of the nodes
during the simulation, particularly in response to
events such as accidents. This analysis can help
understand how nodes react and adapt their speed,
which is critical for evaluating the performance and
safety of the vehicular network.
3.6.4 Overall Packet Loss
The total number of lost packets across all nodes 19.
These plots help identify specific nodes that might be
experiencing higher-than-expected packet loss,
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
410
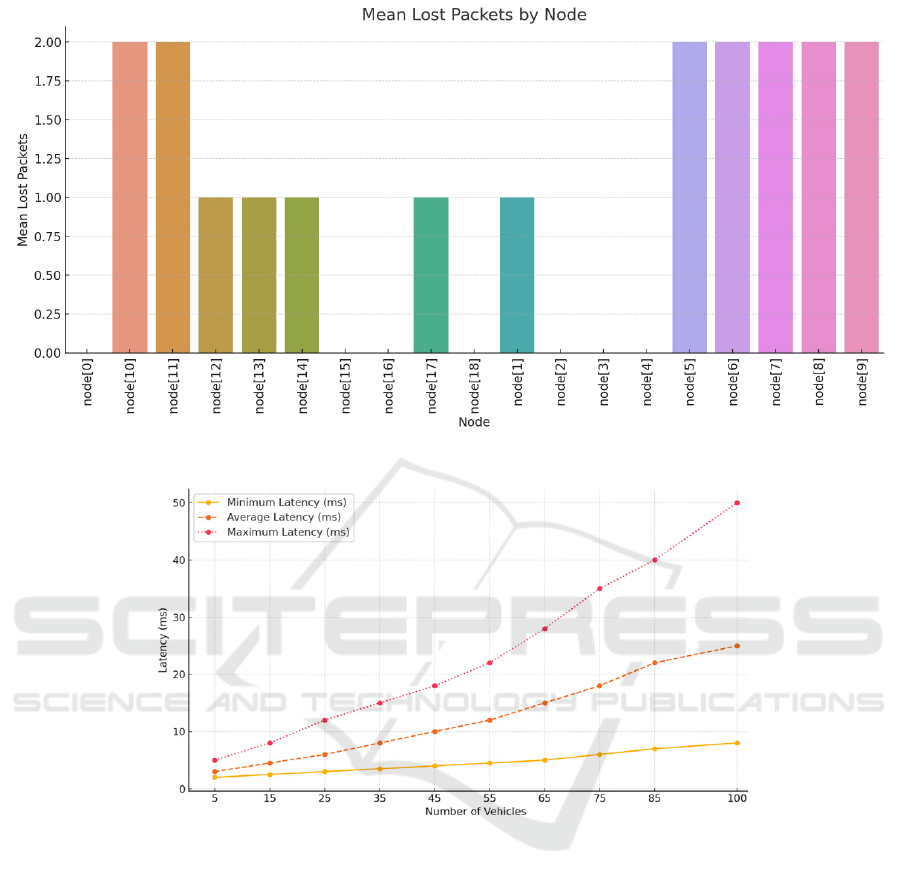
Figure 5: Tatal number of lost packets.
Figure 6: End to end latency variation.
making it easier to pinpoint potential issues for
further investigation or optimization. Total Lost
Packets by Node: This bar plot shows the sum of all
lost packets for each node, providing an overview of
which nodes experienced the highest and lowest total
packet loss as shown in the Figure 5.
3.6.5 Acceleration Insights
• Node 0:
– Highest average acceleration and maximum
acceleration.
– More significant speed changes compared to
other nodes.
• Nodes 5 and 6:
– Similar mean accelerations, slightly negative
(indicating slight deceleration on average).
– Node 5 has the highest variability in
acceleration.
– Node 5 also has the lowest minimum
acceleration value (significant deceleration event).
3.6.6 End-to-End Latency
In the context of this simulation scenario, we
meticulously assessed the end-to-end latency within a
5G-VANET framework where the vehicular count
fluctuated between 5 and 100 within a spatial extent
of 2500 m x 2500 m, facilitated by a single base
station (gNodeB). Each vehicle is programmed to
transmit periodic messages (CAM) comprising 1,500
bytes at a transmission rate of 6 Mbps, occurring at
an interval of 100 ms. The empirical findings
elucidate that the minimum latency consistently
Integrating 5G into VANETs: Methodological Approaches and Performance Evaluation Through Simulation
411

remains low (<8 ms) even in the presence of 100
vehicles; however, both the average and maximum
latency exhibit a considerable escalation in
correlation with an increase in vehicular density,
ultimately reaching 25 ms and 50 ms for 100 vehicles,
respectively. This phenomenon can be attributed to
network congestion and the augmented message
processing demands placed on the gNodeB. Figure 6
depicts the evolution of end to end latency depending
on the number of nodes.
3.7 Discussion
The simulation results indicate that integrating 5G
technology into VANETs offers substantial
improvements in communication performance, which
can lead to enhanced road safety and more efficient
traffic management. The reduced latency and high
packet delivery rates highlight the potential of 5G to
support real-time applications, allowing vehicles to
communicate critical information such as sudden
braking or hazardous road conditions without delay.
However, the results also suggest that there are areas
for further optimization. For instance, while the
performance metrics were strong, the system's
performance in extreme scenarios—such as during
severe weather conditions or in high-density
emergency situations—could be further investigated
to ensure robustness. The findings underline the
importance of selecting appropriate routing protocols,
such as AODV, which were shown to effectively
manage communication in dynamic environments.
Additionally, addressing security concerns is vital for
ensuring the integrity of communications,
particularly given the potential risks associated with
malicious attacks on vehicular networks. Overall, the
simulation results demonstrate the feasibility of 5G-
enhanced VANETs and their significant potential for
contributing to the development of safer and smarter
transportation systems.
4 CONCLUSION
This study has illustrated the substantial advantages
of amalgamating 5G technology with VANETs to
improve the efficacy of vehicular communication
systems. The results of the simulation studies
highlight improvements in key performance metrics
such as reduced latency, increased packet delivery
rates, which are essential for the development of
advanced safety applications. The 5G-enabled
VANET system proves capable of supporting real-
time applications crucial for collision avoidance and
traffic management, thereby contributing to enhanced
road safety. However, challenges remain, particularly
in maintaining network stability in dynamic and high-
density environments, as well as ensuring robust
security against potential threats. Future work should
focus on addressing these issues through optimized
routing protocols and enhanced security frameworks.
REFERENCES
Balen, J., Tomasic, B., Semialjac, K., & Varga, H. (2022,
May). Survey on using 5G technology in VANETs. In
2022 45th Jubilee International Convention on
Information, Communication and Electronic
Technology (MIPRO), pp. 442-448.
Banafaa, M. K., Pepeoğlu, Ö., Shayea, I., Alhammadi, A.,
Shamsan, Z. A., Razaz, M. A., ... & Al-Sowayan, S.
(2024). A comprehensive survey on 5G-and-beyond
networks with UAVs: Applications, emerging
technologies, regulatory aspects, research trends and
challenges. IEEE Access, 12, pp. 7786-7826.
Mushtaq, A., Haq, I. U., Nabi, W. U., Khan, A., & Shafiq,
O. (2021). Traffic flow management of autonomous
vehicles using platooning and collision avoidance
strategies. Electronics, 10(10), pp. 1221.
Abbasi, F., Zarei, M., & Rahmani, A. M. (2022). FWDP: A
fuzzy logic-based vehicle weighting model for data
prioritization in vehicular ad hoc networks. Vehicular
Communications, 33, pp. 100413.
Brummer, A., German, R., & Djanatliev, A. (2019,
September). Modeling V2X communications across
multiple road levels. In 2019 IEEE 2nd Connected and
Automated Vehicles Symposium, pp. 1-5.
Irani, F. (2024). VSIM: a new simulation and performance
evaluation tool for MANET and VANET. International
Journal of Information Technology, pp. 1-17.
Taher, Y. H., Alsaadi, I., Saad, M. A., Ali, A. H., Essa, M.,
& Rashid, A. H. (2024). Performance evaluation of
software defined networking into VANETs system.
Bulletin of Electrical Engineering and Informatics,
13(5), pp. 3770-3778.
Zanotto, E., & Maccari, L. (2024, January). Evaluating the
impact of a 3D simulation model on the performance of
vehicular networks. In 2024 19th Wireless On-Demand
Network Systems and Services Conference (WONS), pp.
77-84.
SUMO Developers. (2024). SUMO: Simulation of Urban
Mobility-Documentation. Retrieved from https://sumo.
dlr.de/docs/index.html. Accessed May 10, 2024.
OMNeT++ Contributors. (2024). OMNeT++: Discrete
Event Simulation System. Retrieved from
https://omnetpp.org/.
VEINS Developers. (2024). VEINS: The Open Source
Traffic Simulation Framework for OMNeT++.
Retrieved from https://veins.car2x.org/.
JOSM Developers. JOSM: Java OpenStreetMap Editor.
https://josm.openstreetmap.de/.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
412
