A Deep Learning Approach to Minimize Retrieval Time in Shuttle-Based
Storage Systems
Paul Courtin
1,2 a
, Jean-Baptiste Fasquel
1 b
, Mehdi Lhommeau
1 c
and Axel Grimault
1 d
1
Universit
´
e d’Angers, LARIS, SFR MASTIC, 62 Av. de Notre Dame du Lac, 49000 Angers, France
2
Knapp France, 3 Cours de la Gondoire, Carr
´
e Haussmann Marne La Vall
´
ee, B
ˆ
atiment A, 77600 Jossigny, France
fi
Keywords:
Automated Warehouse, Machine Learning, Deep Learning, SBS/RS, Allocation, Optimization.
Abstract:
Improvement of picking performances in automated warehouse is influenced by the assignment of articles
to storage locations. This problem is known as the Storage Location Assignment Problem (SLAP). In this
paper, we present a deep learning method to assign articles to storage locations inside a shuttles-based storage
and retrieval system (SBS/RS). We introduce the architecture of our a LSTM-based model and the public
dataset used. Finally, we compare the retrieval time of articles provided by our model against other allocation
methods.
1 INTRODUCTION
A warehouse is an intermediary facility between sup-
pliers and customers that plays an important role
in daily supply chain operations. Warehouse activ-
ities typically encompass receiving, storing, order-
picking, sorting, and shipping, among which order-
picking is the most time and labor consuming oper-
ation (Zhang et al., 2019). Order-picking is the pro-
cess of retrieving items from storage locations to ful-
fil customers orders. In this paper, we focus on an
automated warehouse of type goods-to-man imple-
menting a Shuttle-based Storage and Retrieval Sys-
tem (SBS/RS). SBS/RS are derivative of Automated
Storage and Retrieval System (AS/RS) that operates
shuttles for articles retrieval and storage.
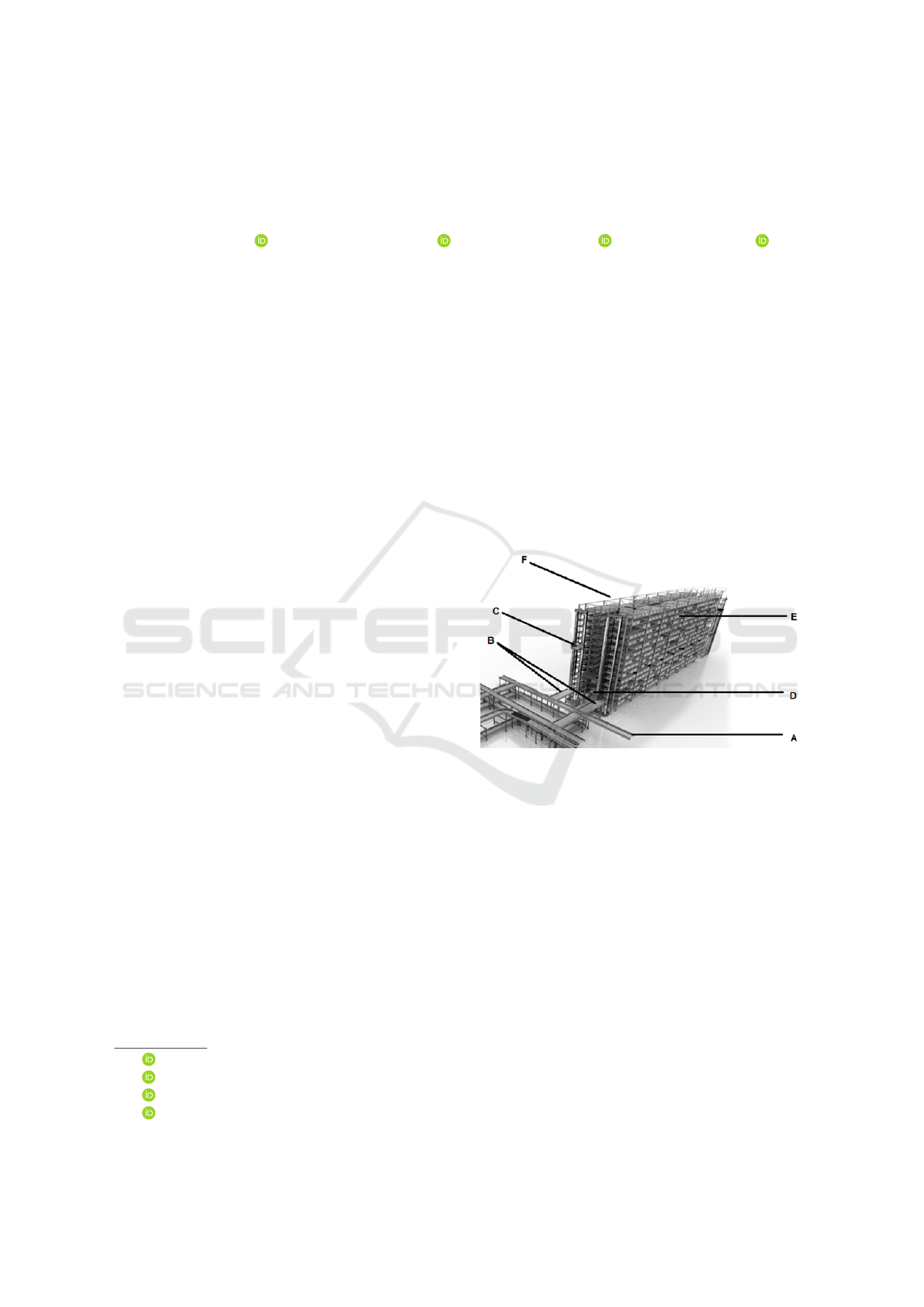
SBS/RS are build with several storage aisles and
levels, see Figure 1. On each floor, a tier-captive shut-
tle operates. These shuttles handle storage totes and
carry them horizontally from and to the lifts. Each
lift, positioned a the begin of the shelf, is responsible
to carry storage totes vertically from each level to the
I/O point of the SBS/RS. The I/O point being the in-
terface between the SBS/RS and the rest of the ware-
house conveyor system. This allow the totes stored in
the SBS/RS to reach pick station located elsewhere in
the warehouse.
a
https://orcid.org/0000-0002-7512-8178
b
https://orcid.org/0000-0001-9183-0365
c
https://orcid.org/0000-0001-5772-282X
d
https://orcid.org/0000-0002-0816-0645
Figure 1: Drawing of an SBS/RS with input and output con-
veyor. (A) Warehouse conveyor; (B) Input and Output (I/O)
conveyor section; (C) Lift moving vertically; (D) Racking
level with shuttles moving horizontally; (E) storage loca-
tion; (F) Aisle.
On goods-to-man automated warehouses, human
operators are static at picking stations where the ar-
ticles to pick are bring to them inside storage totes.
Those totes are convoyed from storage locations to
pick station on mechanised conveyors. SBS/RS are
devices holding thousand of storage totes. Upon
request from the Warehouse Management Software
(WMS) they release storage totes holding the stock
to fulfill picking orders. The time need to travel from
a storage location to a picking station is the retrieval
time.
In our study, we aim to maximize picking effi-
ciency in automated warehouse by reducing the re-
trieval time of storage totes. We limit the scope of our
study to the SBS/RS, we propose a method to opti-
1040
Courtin, P., Fasquel, J.-B., Lhommeau, M. and Grimault, A.
A Deep Learning Approach to Minimize Retrieval Time in Shuttle-Based Storage Systems.
DOI: 10.5220/0013255300003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 3, pages 1040-1047
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

mize the allocation of storage totes (therefore articles)
to storage locations within the SBS/RS. We expect to
minimize the retrieval time by reducing the travel time
(or distance) traveled by shuttles to fulfill pick orders.
This problem of selecting the best assignment for ar-
ticles in a warehouse, while minimizing (or maximiz-
ing) objectives functions, is known as the Storage Lo-
cation Assignment Problem (SLAP). We consider ar-
ticles with only one pack size of 1 piece, therefore in
the remainder of this paper articles are identified as
Stock Keeping Units (SKUs).
The main originality and contribution of this pa-
per is a deep learning-based method using LSTM
to address the Storage Location Assignment Prob-
lem (SLAP) in a Shuttle-Based Storage and Retrieval
System (SBS/RS) warehouse. Our method aims to
tackle peaks situations (sudden and high variation in
requested pieces) occurring for some SKUs identified
in class Z in the XYZ-Analysis. Another part of the
contribution regards preliminary experiment on a real
dataset.
The remainder of the paper is organize as follow.
In section 2, we present a comprehensive state of the
art on SLAP, covering previous approaches such as
dynamic programming, integer linear programming,
heuristics, and machine learning models like cluster-
ing and deep reinforcement learning applied to logis-
tics. In section 3, we detail our approach which com-
bines Long Short-Term Memory (LSTM) (Hochreiter
and Schmidhuber, 1997) model to predict future de-
mands with an optimization process to assign to stor-
age locations, aiming to minimize shuttle travel time
for articles retrieval. The experiments, detailed in
section 4, compare the performance of this method
against other standard strategies (mean, random, and
naive methods) by evaluating metrics such as bad al-
location rate and retrieval time during peak demand.
The results show that the LSTM model outperforms
the comparative methods by reducing retrieval time,
and it proves particularly effective in handling peak
demand. Finally,in section 5 we discuss future direc-
tions for improving the model, notably enhancing its
scalability to handle larger datasets without relying on
a reference allocation.
2 RELATED WORKS
The SLAP was formalized (Hausman et al., 1976) and
later proved NP-hard (Frazelle, 1989). Several solu-
tions have been proposed to solve the SLAP, such as
exact methods: dynamic programming, integer mixed
linear programming (Reyes et al., 2019), approximate
methods: heuristics (Zhang et al., 2019) and meta-
heuristics (Talbi, 2016) and simulations. Dedicated
storage strategies and policies are also utilize. The
most common strategies are Class-Based (CB): where
SKUs are group into classes depending on various cri-
terion such as ABC-Analysis (Hausman et al., 1976)
or XYZ-Analysis (Nowoty
´
nska, 2013; Stojanovi
´
c and
Regodi
´
c, 2017).
Some studies are addressing the SLAP with ma-
chine learning utilizing k-means Clustering algorithm
(Huynh et al., 2024). Others are introducing explain-
able machine learning models for decision making
based on decision trees (Berns et al., 2021). Another
uses a recurrent network to predict the duration of stay
of pallets in the AVS/RS in order to optimize ware-
house storage assignment (Li et al., 2019).
Other studies, not specific to logistic, have demon-
strate the capabilities of machine learning algorithm
like Random Forest, K-Nearest Neighbors (K-NN) to
address other allocation problem (Al-Fraihat et al.,
2024).
A recent study solves the SLAP using Reinforce-
ment Learning (Troch et al., 2023). In this study, the
SLAP is solve as a sequential decision-making prob-
lem. A standard Markov Decision Process (MDP)
model is created. The agent aims to optimize the lay-
out by adjusting product locations based on popular-
ity. The reward is calculated using a metric, which
takes into account the number of times products ap-
pear in orders and their distances from pickers. The
solution is then compare with a genetic algorithm ap-
proach.
Another study uses Deep Reinforcement Learning
(DRL) to address dynamic storage location assign-
ment problem (DSLAP) (Waubert de Puiseau et al.,
2022). DSLAP is defined as the problem of determin-
ing where to optimally store goods in a warehouse
upon entry or reentry. (Waubert de Puiseau et al.,
2022) are using Q-Learning with Proximal Policy Op-
timization (PPO) algorithm. Their Objective is to de-
crease transportation costs within the warehouse by
assign pallet to zones (A, B, or C) to locations. The re-
ward is set proportional to each operation’s cost. They
compare results with rule-based benchmark methods
on the test data.
To the best of the authors knowledge, no study ad-
dresses the SLAP using deep learning method (Zarin-
chang et al., 2023). We propose a deep learning model
to dynamical allocate SKUs into storage locations of
a SBS/RS device operating in an automated goods-
to-man warehouse, in order to minimize the retrieval
time of storage totes.
A Deep Learning Approach to Minimize Retrieval Time in Shuttle-Based Storage Systems
1041

3 PROPOSED APPROACH
The proposed method consist of a deep learning algo-
rithm trained with data generated by an optimization
process, based on the following assumptions:
1. We consider only one pack size for articles.
Therefore for the remainder of the paper one ar-
ticle = one Stock Keeping Unit (SKU);
2. Each storage tote is configured in 1/1. So one and
only one SKU type can be stored in a storage tote;
3. Only one SKU piece is store into a tote;
4. A SKU can be assign to one or more storage tote;
5. SBS/RS is configured in single deep. Only one
storage tote per storage location;
6. No short picks during picking. Their is enough
stock to fulfill picking orders;
7. Replenishment and re-allocation of storage tote
are performed overnight, between shifts.
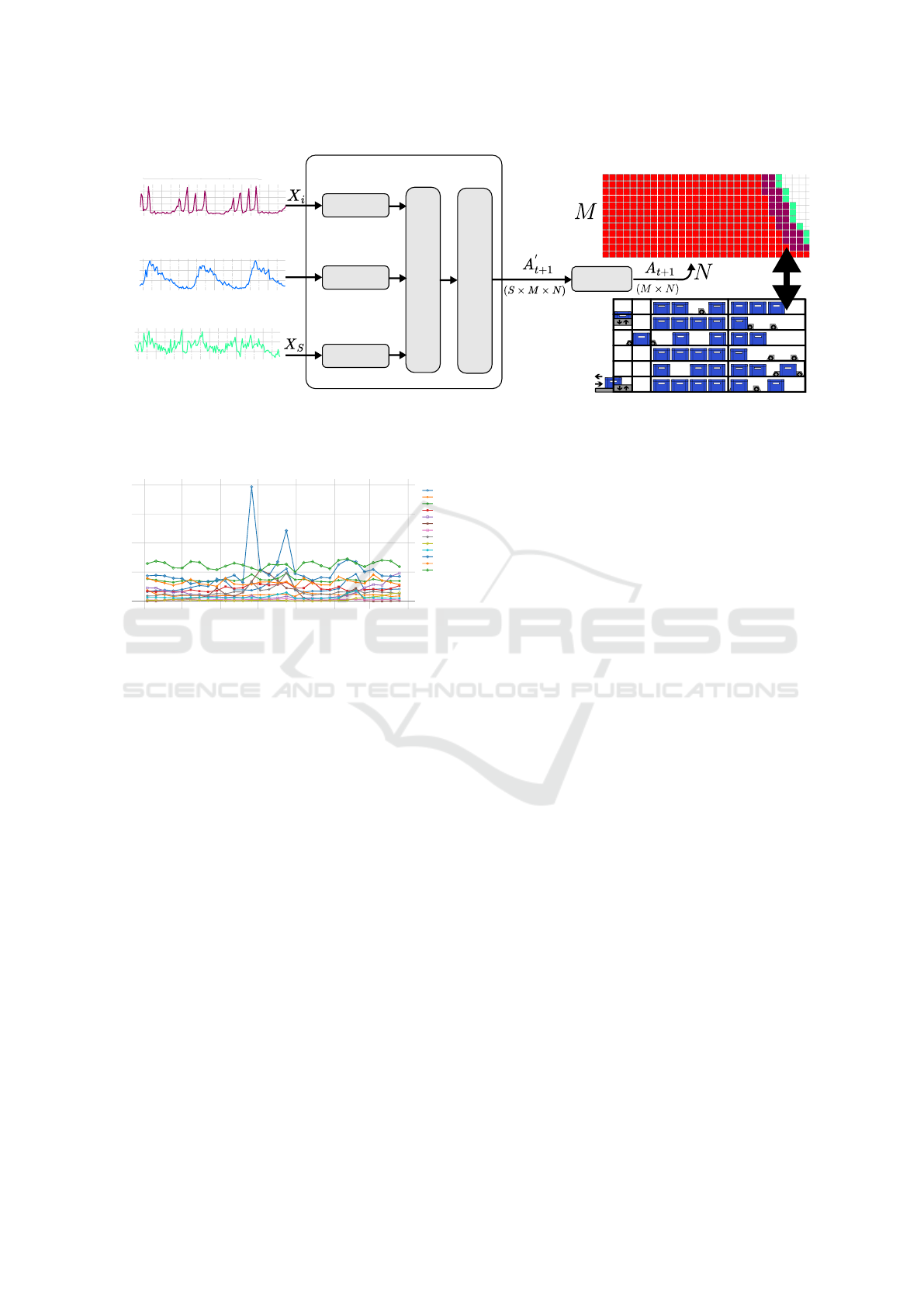
Figure 2 shows an overview of the proposed deep
learning model. Historical data, X
i
(t) is the number of
requested pieces i ∈ S products at day t, from a past
period (from t − τ to t) are provided to this model,
where S is the set of SKUs. The model provides an
output allocation matrix, A
t+1
, for the next day t + 1.
This allocation matrix A
t+1
(k, l) = i is of size M × N,
with index k ∈ M the height of the SBS/RS (number of
levels) and l ∈ N is the width of the SBS/RS (number
of channels).
In our architecture, a dedicated part handles his-
torical time series data. In this part, for each SKU,
past period ([t − τ;t]) data are processed by an LSTM
(Long Short-Term Memory) network (Hochreiter and
Schmidhuber, 1997). Each LSTM deliver a tensor of
size (τ × lstm hidden size). The LSTM results are
then concatenated and passed to a linear layer. This
layer adds an extra SKU representing empty locations
assignment. The convolution layer subsequently re-
duces the output sequence length (kept by LSTM) to
the model prediction horizon set to (h = 1) for a next-
day prediction (t + 1). Eventually the output of the
model A
′
(t+1)
is a tensor of size (S × M × N). It holds
for each SKU (plus empty locations) the probability
of being assigned to each storage position.
The final assignment matrix A
(t+1)
, of size (M ×
N), is computed using the argmax function:
A
(t+1)
(k, l) = argmax
s
A
′
(t+1)
(s, k, l),
which selects the index of the SKU with the highest
probability for each storage location (k, l).
The model is trained using optimal assignment
matrices, together with related inputs. Optimal matri-
ces are produced using a mixed integer programming
model which solves the SLAP ((Kellerer et al., 2004),
(Zhang et al., 2019)). The solution of this optimiza-
tion model is referred as the ground truth thereafter.
The optimization criterion is to minimize the cost
of retrieving SKUs considering the binary decision
variable x
s,k,l
equal to 1 if the SKU s ∈ S is assigned
to the position k ∈ M, l ∈ N. In such case, the cor-
responding allocation index A
t+1
(k, l) = s is directly
linked to the value of variable x
s,k,l
.
For each each storage location (k, l) the cost of
retrieving a SKUs from a storage location to the I/O
entry/exit point of the SBS/RS, is noted c
k,l
. The re-
trieval cost is computed using velocity and accelera-
tion of shuttles and lifts.
The objective function to be optimized can be for-
mulated as follow in Equation 1.
z = min
∑
s∈S
∑
k∈M
∑
l∈N
x
s,k,l
· c
k,l
(1)
∑
s∈S
x
s,k,l
≤ 1 ∀k ∈ M∀l ∈ N (2)
∑
k∈M
∑
l∈N
x
s,k,l
= 1 ∀s ∈ S (3)
x
s,k,l
∈ {0, 1} ∀s ∈ S, ∀k ∈ M, ∀l ∈ N
Constraint (Equation 2) imposes only one SKU
for each position, constraints (Equation 3) imposes
only one position for each SKU. These constraints
could be extended based on other properties associ-
ated with SKUs, such as the problem of compatibility
between products (i.e. perishable or flammable prod-
ucts).
4 EXPERIMENTS AND RESULTS
In this section, first we outline the dataset used and the
configuration of the model. Then we introduce the
evaluation metrics and finally we present the results
over a real dataset.
4.1 Dataset
The input data represents the daily demand of pieces
to pick for a set of SKUs in an automated warehouse.
Those timeline have been extracted from a publicly
available data ”Retail Data Analytics” hosted on Kag-
gle
1
. This dataset holds historical weekly sales data
from 45 stores, over a period from May 2010 to Jan-
uary 2012 (143 weeks).
1
https://www.kaggle.com/datasets/manjeetsingh/
retaildataset?select=sales+data-set.csv
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
1042
I/O
point
LSTM
LSTM
Linear
Conv1D
AllocationNet
# pieces requested
Allocation matrix
timestamp
LSTM
......
......
argmax
Jul 2010 Jan 2011 Jul 2011 Jan 2012 Jul 2012
20
30
40
50
Jul 2010 Jan 2011 Jul 2011 Jan 2012 Jul 2012
20
40
60
Jul 2010 Jan 2011 Jul 2011 Jan 2012 Jul 2012
2
3
4
Figure 2: Overview of the proposed approach, using historical data, the model will allocate SKUs to storage locations.
(right) Historical data, pieces requested per SKU. (middle) Our deep learning model. (left) Produced allocation matrix and a
representation of the SBS/RS side view.
Sep 2010 Oct 2010 Nov 2010 Dec 2010 Jan 2011 Feb 2011 Mar 2011 Apr 2011
0
50
100
150
200
SKUs
A
B
C
D
E
F
G
H
I
J
K
L
M
Dataset Overview
date
# pieces requested
Figure 3: Dataset overview of a subset (30 days) of the time
series of number of pieces requested for 13 SKUs for 143
days (local view of superimposed data, compared to Figure
2). For example, SKU M (+) as a seasonal behavior, SKU
K (⋄) as peaks in November 2010 and December 2010.
Each original store is composed with up to 100
department. As we consider only one warehouse in
our study, for each 45 stores we merge (sum up) the
weekly sales for each department. From 100 avail-
able departments, we keep a subset of 13 departments
and considered each department as a unique SKU. We
also consider each weekly sale entry as a day entry.
The selection was made to keep timelines with
even demand (class X from XYZ-Analysis), sea-
sonal behaviour (class Y from XYZ-Analysis) and
timelines with peaks (class Z from XYZ-Analysis).
We keep following departments: 1, 3, 4, 11, 16,
18, 35, 55, 56, 67, 72, 79 and 91. Figure 3
presents an overview of the dataset used. For all
SKUs, in average 300 pieces are requested every day.
The minimal and maximal daily request 233 and 483.
The minimum and maximum number of pieces to per
SKU are respectively 0 pieces for SKU F and I and
203 pieces for SKU K.
4.2 Model Configuration
We implemented and conducted the experiments us-
ing Python 3.12.0 and implemented the deep learn-
ing model with PyTorch 2.3.1 package. Ground
truth allocation matrices for training purposes have
been generated with a MIP model implemented and
solved with OR-Tools 9.8.3. We trained our model
using supervised training method. The model was
configured with the following hyper-parameters: τ =
8, N = 40, M = 15 and S = {1, . . . , 13}. The number
of hidden units per LSTM layer is set to 600. This
lead to a model with # 84,342,009 trainable param-
eters.
Training was computed over 1000 epochs, using
Mean Squared Error (MSE) as the loss function. We
used Adamax algorithm for the gradient descent, with
learning rate γ = 0.002, betas β
1
= 0.9, β
2
= 0.999
and epsilon ε = 1e
−08
. We used a reduce learning rate
technique with a patience of 10 epochs, factor 0.1 in
minimizing mode. No data pre-processing was per-
formed (i.e. no scaling, normalization nor standard-
ization of the data)
Dataset have been split into training, validation
and testing sets, 50%(71 days), 10% (14 days) and
40% (57 days) of the whole dataset. Due to the lim-
ited size of dataset (143 days) and the training subset
(71 days), we expanded the training data by repeating
it 10 times to accelerate the training process. As a re-
sult, during each training epoch, our model effectively
trains on a dataset equivalent to 710 days instead of
the original 71 days.
A Deep Learning Approach to Minimize Retrieval Time in Shuttle-Based Storage Systems
1043
Nov 2010 Jan 2011Dec 2010 Feb 2011
0
50
100
150
200
Pieces requested per SKU
period
# pieces requested
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
Allocation at t=46
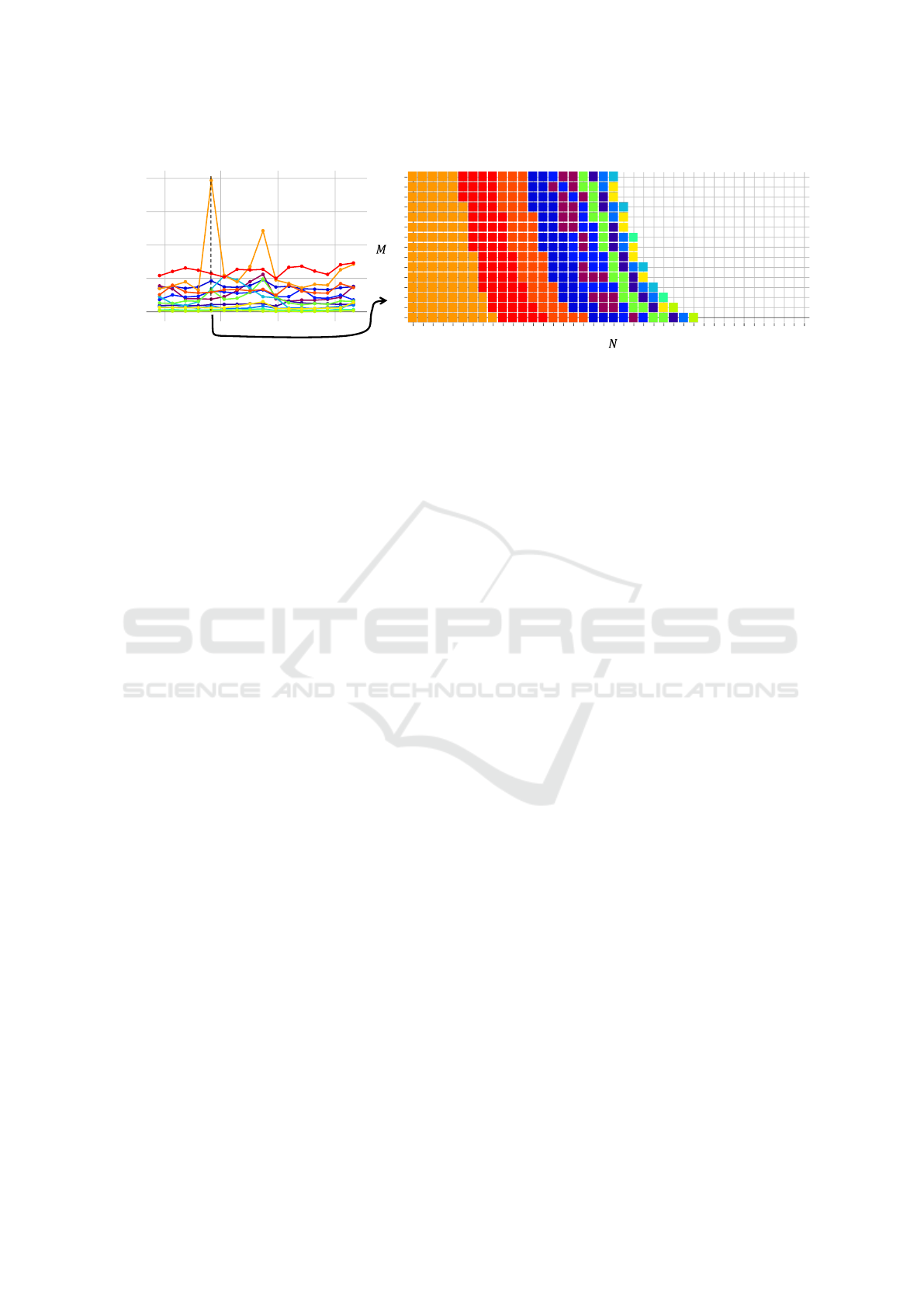
Figure 4: Ground truth dataset overview, input, and output data. (left) Number of pieces requested for each 13 SKUs for 16
days displayed (right) Allocation of SKUs into the 600 storage locations for timestamp t = 46.
4.3 Allocation Methods for Comparison
Purposes
To assess the efficiency of our proposed pipeline, we
compare it’s allocations against three other standard
methods, as well as with the ground truth. As detail in
previous paper (Courtin et al., 2024), we will compare
with Mean, Naive and Random methods. All methods
will return an allocation of SKUs for the next day t +
1:
• Mean: method consists of determining the num-
ber of pieces request for each SKU at t + 1 then
assign SKUs. It computes the average demand
over the last 30 days (as usually performed in the
industry). Then SKUs are assigned to location
based on their demand. Highly demanded SKUs
are stored into free storage locations with cheap-
est retrieval cost;
• Naive: method is based data from the previous
day. The number of pieces request for each SKU
at t + 1 is considered the same as current day
t. Then the SKUs are assigned like describe in
method Mean;
• Random: method randomly assigns SKUs to
storage locations following a uniform distribution.
The number of pieces per SKUs at t +1 is not cal-
culated but known from input data.
4.4 Evaluation Metrics
To compare allocations between methods, we intro-
duce the following metrics: Bad Allocation Rate, Re-
trieval Time and Retrieval Time on Peaks:
• Bad Allocation Rate. (BAR), expressed in per-
centage, measures the difference of the number of
storage locations used by a method and their po-
sitions compared to the ground truth. A low BAR
value, close to 0%, means that the allocation of the
method is close from the ground truth. It indicates
a small variation in numbers and positions of the
selected storage locations. Higher BAR scores,
closer to 100%, are implying to much (or to few)
storage locations used and a spread of the selec-
tion.
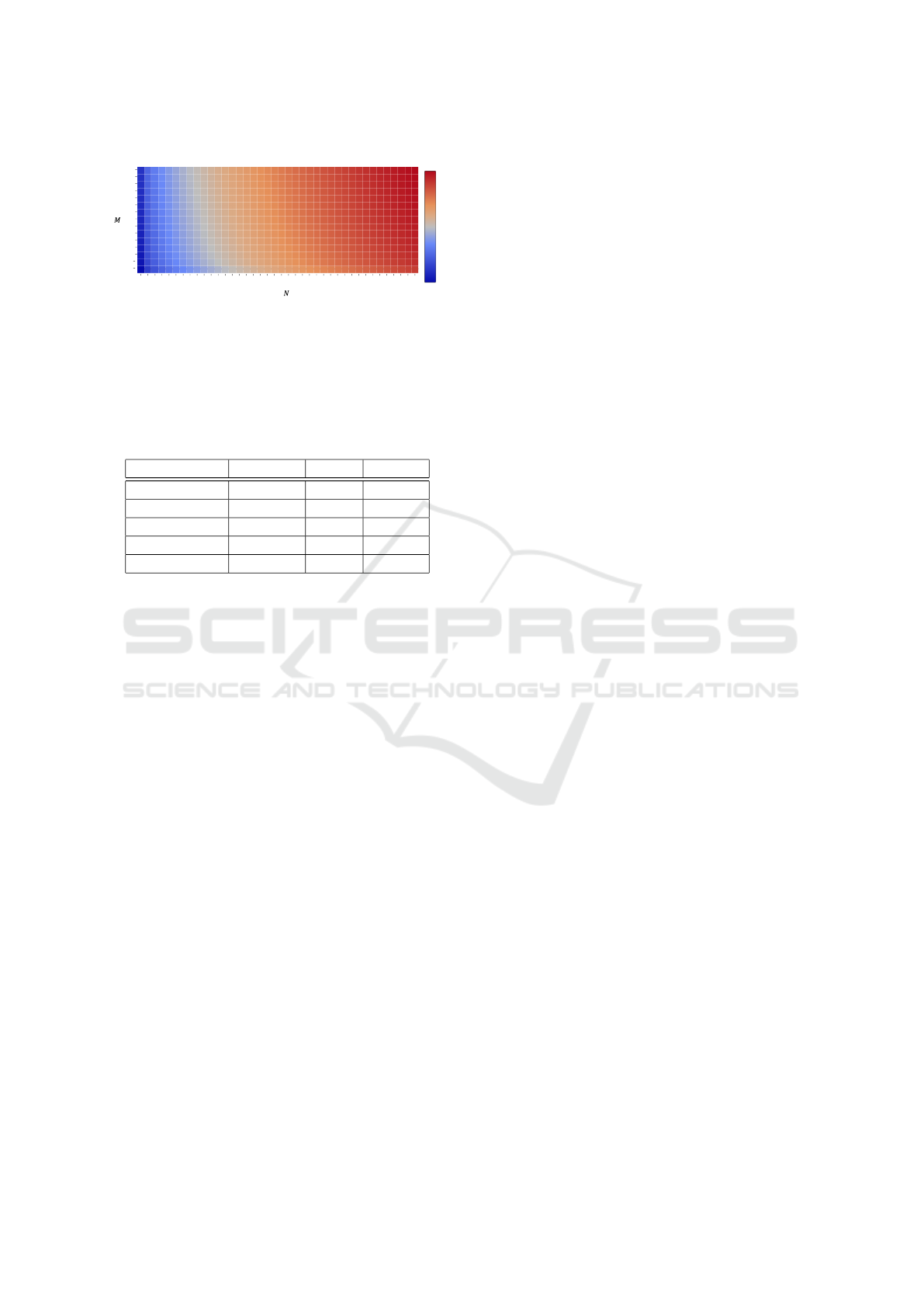
• Retrieval Time. (RT) measures the number of
seconds required to take-out all requested SKUs
from the SBS/RS. Retrieval time is computed us-
ing the retrieval cost of each storage location and
the number of pieces to pick per SKU, see. The
retrieval cost is calculated using shuttles and lifts
velocity and acceleration Figure 5. We also intro-
duce a penalty to retrieval times. If a method does
assigned enough storage locations to fulfill daily
request, extra storage location are assigned and a
penalty is added to the RT. The penalty is equals to
storage location retrieval cost double. This aims
to simulate the additional time required to replen-
ish the SBS/RS with the missing pieces.
• Retrieval Time for Peaks. (RTP) measures the re-
trieval time of SKUs only at peaks timestamps.
This metric allows us to assess if a method is
able to detect and react to peaks in SKUs de-
mands (handling the case of class Z in the XYZ-
Analysis).
4.5 Results
Table 1 presents the compiled results of metrics com-
puted from the allocations provided by all methods
on the real dataset. It presents the daily average value
of each metric: BAR, RT with penalty, and the RTP
timestamps for each allocation method.
We observe that our approach provides the best
score for each metric. For the BAR, the small score of
our method indicates than the positions and number of
selected storage locations are close from the ground
truth. The small RT and RTP indicate that our method
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
1044
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 3839
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
0
5
10
15
retrieval
time [s]
Cost matrix
Figure 5: Cost Matrix example. For each storage location
time in seconds need to retrieve a SKU from the location to
the I/O point. I/O points set at level 0 and channel 0. Stor-
age locations closer to this point have the smallest retrieval
time.
Table 1: Metrics compiled results on real dataset for 13
SKUs. Daily average value of Bad Allocation Rate (BAR),
Retrieval Time (RT) and Retrieval time on peaks (RTP) for
each allocation method.
Method BAR [%] RT [s] RTP [s]
Random 48.96 3425 3526
Mean 21.35 3763 4704
Naive 5.57 2935 3736
Our approach 3.20 2917 3367
Ground truth – 2525 3154
(event with penalties) provides ”goods” allocations to
keep the retrieval time low. SKUs are correctly sorted
and put to the I/O point depending of the demand.
The Random allocation strategy gives a mean
BAR of 48.96%, meaning almost half of the selected
location by this methods are different one than the lo-
cations selected in ground truth. The Mean method
yields a BAR of 21.35%, implying a bad selection
of storage location almost every fifth allocation. The
Naive method provides a BAR of 5.57%. Our method
returns the smallest BAR of 3.2 %, meaning our deep
learning model, for the same input data, will selected
the same storage locations than the one selected by
ground truth 96 % of the time. An example of differ-
ence in locations selection is illustrated in Figure 7.
Concerning retrieval time, Mean method provides
the highest retrieval time with 3763 seconds in aver-
age. The Random method provides better than Mean
with a RT of 3425 seconds. Naive and our method
provide the smallest retrieval time with respectively
2935 and 2917 seconds.
Regarding retrieval time at peaks timestamp, the
Mean method yields the longest retrieval time, 4704
seconds. This may be explained by the missing lo-
cations selected, because of the wrong assumption of
number of pieces to pick calculated by average mean
of 30 days. Then Naive method gives a RT of 3736
seconds on peaks timestamp. Random method per-
form again surprisingly well, with the second best RT
on peaks of 3526 seconds. This may be explained by
the absence of penalty applied to this method. For
this method storage location are choose randomly but
the number of pieces to pick at t + 1 is known from
the historical data (like ground truth). Eventually our
method allows for the smallest RT on peaks with 3367
seconds.
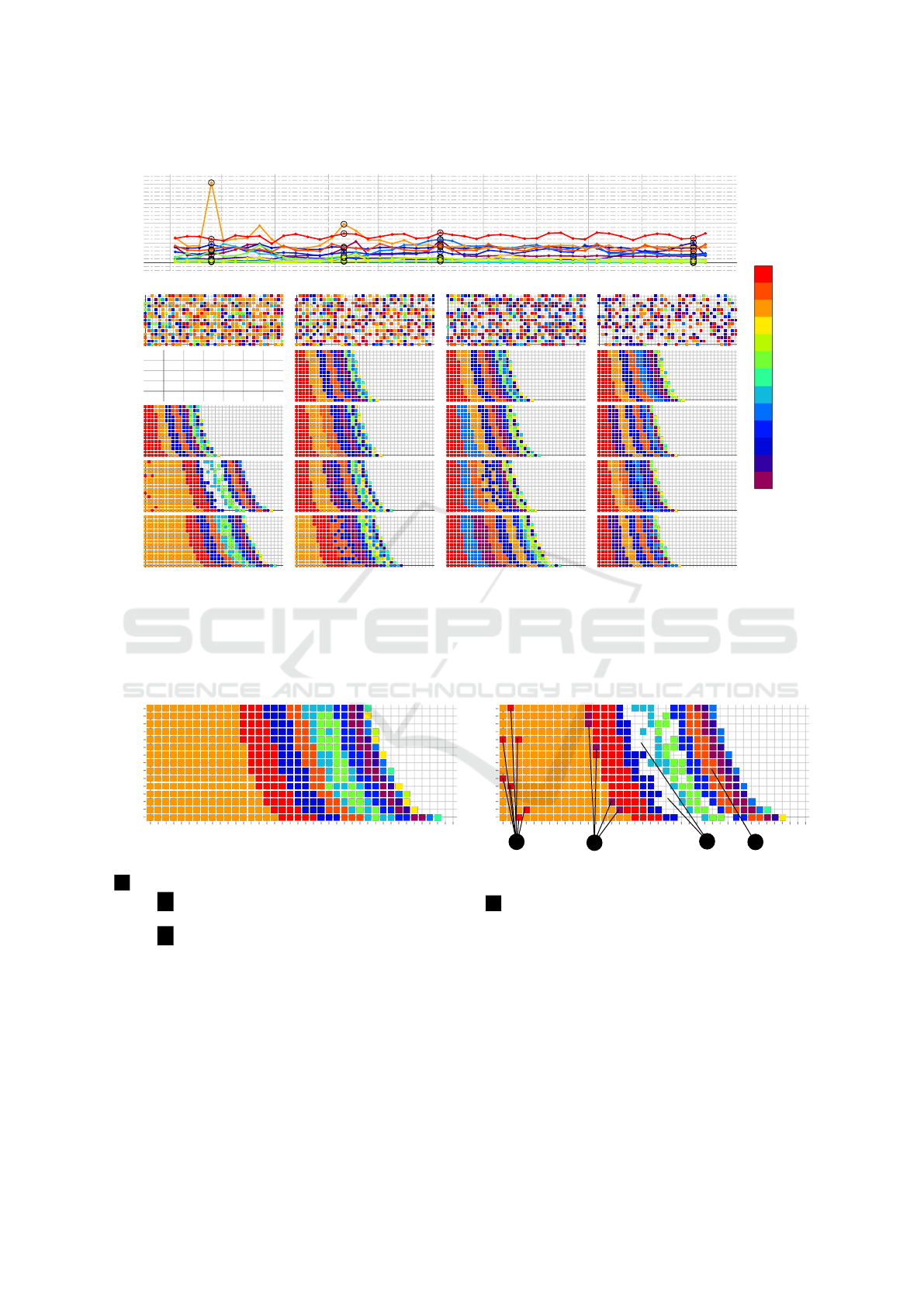
Figure 6 displays examples of allocations pro-
vided provided by each method and ground truth at
4 timestamp. One timestamp t = 13 during a peak
of SKU K it’s demand varies starts from 43 pieces,
reach peak of 200 pieces and drops to 55 pieces re-
quested. Only our method is able to identify the peak.
Another timestamp t = 24 displays allocation for a
smaller peak of SKU K. In this situation our method
as swapped the most requested SKU K with the sec-
ond most requested E with respectively 98 and 74
pieces to pick. Another timestamp t = 32 a usual daily
demand with significant raise in demand of SKU E.
Here our method react correctly for the second most
requested SKU E (59 pieces), but the third SKU A
(57 pieces) was put behind other SKUs, this will lead
to high penalty retrieval time. Eventually timestamp
t = 53 where SKU B becomes the second most re-
quested SKU. Note: Because of the size of the test
dataset, the position of the significant peak in demand
for product K and the 30 days need to compute the al-
location, the Mean method cannot provide allocations
for the first displayed timestamp.
This figure illustrates the ability of our method
to handle significant peaks in SKU demand, like at
timestamp t = 13. But some locations in the middle
of the SBS/RS are left empty, see Figure 7. And some
assignments are swapped compared to ground truth.
This indicates that our Model could be further trained.
Despite those swapped, misplaced or empty alloca-
tions our method provides the best BAR, RT and RTP
scores.
Experiments conducted on a real dataset have
demonstrated that our deep learning model using
LSTM was able to allocated SKU to storage location
with decent performances. The low BAR scored in-
dicates that allocations provided where close to the
ground truth (in number and positions). The small
RT value on peaks indicates the ability to handle
peaks situations. Regarding RT for the whole period
our method return the lowest score. Although naive
method returns the second best score on BAR and RT
metrics.
A Deep Learning Approach to Minimize Retrieval Time in Shuttle-Based Storage Systems
1045
Nov 2011 Jan 2012 Mar 2012 May 2012 Jul 2012 Sep 2012
0
50
100
150
200
A
B
C
D
E
F
G
H
I
J
K
L
M
Sku name
Allocations comparison on real dataset
# pieces requested
randommeannaivelstm
ground_truth
Allocation at t=13 Allocation at t=24 Allocation at t=32 Allocation at t=53
Figure 6: Methods allocations comparison. (top) Timeline of number of requested pieces for each SKU over 45 days. (bottom)
Allocations provided by each method and ground truth for 4 timestamp. One timestamp t = 13 during a peak of SKU K.
Another timestamp t = 24 displays allocation for a smaller peak of SKU K. Another timestamp t = 32 a usual daily demand
with significant raise in demand of SKU E. Eventually timestamp t = 53 where SKU B becomes the second most requested
SKU. Note: Because of the size of the test dataset, the position of the significant peak in demand for product K and the 30
days need to compute the allocation, the mean method cannot provide allocations for the first displayed timestamp.
0 5 10 15 20 25 30 35 39
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
0 5 10 15 20 25 30 35 39
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
Ground Truth
channel
level
level
channel
Prediction LSTM
a
b
d
c
Figure 7: Example of allocations at peak timestamp provided by ground truth (left) compare to our method (right). At marker
a between channel 0 and 5, we observe misplace allocations of SKU M, it should not be place so close from the I/O. At
marker b SKU A has 5 misplaced reserved locations. At marker c between channels 20 and 25 some locations have been
left empty. This means shuttles need to cross this empty section for retrieving operations, impacting the retrieval time. At
marker d SKU L have been assigned farther from the I/O point They should have been place after the SKU H in the empty
space. All those misplacement, swap and empty space contribute to downgrade the RT score of our method. This indicates
that our Model could be further trained.
5 CONCLUSION AND
PERSPECTIVES
We have proposed a new data-driven approach to
address the Storage Location Assignment Problem
(SLAP) with a deep learning model using LSTM. Our
proposed method generates assignments of SKUs in
SBS/RS storage locations based on historical picking
orders. On a previous work we utilize our model on
a synthetic generated dataset. The follow-up experi-
ments conducted in this paper on a real dataset have
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
1046

shown that our model, reduces shuttles retrieval time,
is capable to process real data and able to handle peak
situations.
Our deep learning model outperformed other
methods and provides a lower BAR and smaller re-
trieval time.
A limitation of our proposal is the requirement of
generating ground truth allocations for training, there-
fore requiring mixed integer programming techniques
that could be time consuming.
An alternative to study is to design a loss func-
tion based on the retrieval time of predicted alloca-
tions, instead of using a loss which compares pre-
dicted and ground truth allocations. We aim at train-
ing our model without generating ground truth data
(allocations for the next day) beforehand. For future
work, we will design a loss that will assess the error
(or ”correctness”) of the allocations returned by our
Deep Learning model and allow us to perform back-
propagation based on this error and adjust our model
weights accordingly. This custom loss will compute
an error score using the SBS/RS cost matrix, pre-
dicted SKUs allocations probability and the number
of pieces to pick.
ACKNOWLEDGEMENTS
Funding: All research in this study was funded by
KNAPP France. There was no external funding.
Competing interests: This work was done in the
course of employment at KNAPP France, with no
other competing financial interests. Data and mate-
rials availability: This work used publicly available
data from Kaggle
REFERENCES
Al-Fraihat, D., Sharrab, Y., Al-Ghuwairi, A.-R., Alzabut,
H., Beshara, M., and Algarni, A. (2024). Utiliz-
ing machine learning algorithms for task allocation
in distributed agile software development. Heliyon,
10(21):e39926.
Berns, F., Ramsdorf, T., and Beecks, C. (2021). Machine
Learning for Storage Location Prediction in Indus-
trial High Bay Warehouses, page 650–661. Springer
International Publishing.
Courtin, P., Grimault, A., Lhommeau, M., and Fasquel, J.-
B. (2024). A deep learning approach to address the
storage location assignment problem. ICAART 2024,
Doctoral Consortium.
Frazelle, E. H. (1989). Stock location assignment and order
picking productivity. PhD thesis, Georgia Institute of
Technology.
Hausman, W., Schwarz, L., and Graves, S. (1976). Optimal
Storage Assignment in Automatic Warehousing Sys-
tems. Management Science, 22(6).
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural Computation, 9(8):1735–1780.
Huynh, H.-D., Nguyen, D. D., Do, N.-H., and Nguyen,
K.-V. (2024). A Clustering Algorithm for Storage
Location Assignment Problems in E-commerce Ware-
houses, page 251–265. Springer Nature Switzerland.
Kellerer, H., Pferschy, U., and Pisinger, D. (2004). Knap-
sack Problems. Springer, Berlin, Germany.
Li, M. L., Wolf, E., and Wintz, D. (2019). Duration-of-stay
storage assignment under uncertainty.
Nowoty
´
nska, I. (2013). An application of XYZ analysis
in company stock management. Modern Management
Review.
Reyes, J. J. R., Solano-Charris, E. L., and Montoya-Torres,
J. R. (2019). The storage location assignment prob-
lem: A literature review. International Journal of In-
dustrial Engineering Computations, page 199–224.
Stojanovi
´
c, M. and Regodi
´
c, D. (2017). The significance
of the integrated multicriteria ABC-XYZ method for
the inventory management process. Acta Polytechnica
Hungarica, 14(5):20.
Talbi, E.-G. (2016). Combining metaheuristics with math-
ematical programming, constraint programming and
machine learning. Annals of Operations Research,
240(1):171–215.
Troch, A., Mannens, E., and Mercelis, S. (2023). Solving
the storage location assignment problem using rein-
forcement learning. In Proceedings of the 2023 8th
International Conference on Mathematics and Artifi-
cial Intelligence, ICMAI 2023, page 89–95. ACM.
Waubert de Puiseau, C., Nanfack, D., Tercan, H., L
¨
obbert-
Plattfaut, J., and Meisen, T. (2022). Dynamic storage
location assignment in warehouses using deep rein-
forcement learning. Technologies, 10(6):129.
Zarinchang, A., Lee, K., Avazpour, I., Yang, J., Zhang, D.,
and Knopf, G. K. (2023). Adaptive warehouse stor-
age location assignment with considerations to order-
picking efficiency and worker safety. Journal of In-
dustrial and Production Engineering, 0(0):1–20.
Zhang, R.-Q., Wang, M., and Pan, X. (2019). New model of
the storage location assignment problem considering
demand correlation pattern. Computers & Industrial
Engineering, 129:210–219.
A Deep Learning Approach to Minimize Retrieval Time in Shuttle-Based Storage Systems
1047
