
Analysis of Polymers for Additive Manufacturing: Based Contact
Pressure and Force Sensors
Tiziano Fapanni
1 a
, Jacopo Agnelli
2 b
, Raphael Rosa
3 c
, Giuseppe Rosace
3 d
,
Francesco Baldi
2 e
and Nicola Francesco Lopomo
4 f
1
Department of Information Engineering, University of Brescia, Brescia, Italy
2
Department of Mechanical and Industrial Engineering, University of Brescia, Brescia, Italy
3
Department of Engineering and Applied Science, University of Bergamo, Bergamo, Italy
4
Department of Design, Politecnico di Milano, Milan, Italy
Keywords: Contact Pressure Sensors, Force Sensors, Additive Manufacturing.
Abstract: The rapid advancements in Industry 4.0 and wearable technology have heightened the demand for flexible,
robust, and sensitive sensors that can be integrated into diverse applications. This work investigates the
potential of various polymeric materials, processed through additive manufacturing techniques such as Fused
Deposition Modeling (FDM) and Stereolithography (SLA), to act as transducers in contact pressure and force
sensors. In this work, four possible polymeric materials were tested. Those materials were specifically
selected to present both capacitive and piezoresistive transduction principles, aiming to develop flexible and
highly sensitive sensors to pressure variations. In this frame, one of the key challenges is the hysteretic
behavior typical of polymeric materials, which affects both mechanical (16.9 % on average) and electrical
performance (20.7 % and 24.4% on average on capacitive and resistive devices, respectively). It must be
underlined that significant variations were noted between the filled materials and the microstructured one,
with the latter one being less stiff and able to withstand lower loads (up to 90 N) with an impressive 13-fold
increase in sensitivity compared to thermoplastic polyurethane (TPU). This novel approach seems to pave the
way for optimizable sensor performance in terms of sensitivity at low loads.
1 INTRODUCTION
Following to the Industry 4.0 paradigm, a new
technological era has emerged, thanks to the
integration of different digital tools such as Big Data,
Internet of Things (IoT), Additive Manufacturing
(AM) and Cloud Computing. These technologies
enable a synergistic relationship between humans and
Smart Objects (SOs), a set of interconnected devices
that compose smart systems (Kortuem et al., 2010;
Munirathinam, 2020). SOs are thus devices equipped
with sensors, microcontrollers, and AI-based
algorithms, that can monitor variations in physical
a
https://orcid.org/0000-0002-5164-6907
b
https://orcid.org/0009-0003-8393-2654
c
https://orcid.org/0000-0002-9744-9511
d
https://orcid.org/0000-0003-0604-4453
e
https://orcid.org/0000-0001-6174-4474
f
https://orcid.org/0000-0002-5795-2606
parameters (e.g. temperature, humidity, mechanical
deformations, etc.). The real-time collection,
elaboration and transmission of this data allow for the
creation of a digital tread approach that, thanks to
advanced analytics, fosters new functionalities such
as real-time monitoring, automation, and preventive
maintenance in general, thus improving the
possibilities of each device and their production
process as well (Bianchini et al., 2024). The
flexibility of SOs can be seen across a wide range of
industries. For example, in sports, SOs can monitor
athletes’ health, suggest how to improve their
performances, reduce the risk of injuries, and foster
180
Fapanni, T., Agnelli, J., Rosa, R., Rosace, G., Baldi, F. and Lopomo, N. F.
Analysis of Polymers for Additive Manufacturing: Based Contact Pressure and Force Sensors.
DOI: 10.5220/0013257100003911
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 18th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2025) - Volume 1, pages 180-187
ISBN: 978-989-758-731-3; ISSN: 2184-4305
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

engagement (Mendes et al., 2016). In industrial
settings, SOs provide the possibility to enhance
worker safety, as they can track physiological and
environmental conditions, detecting critical changes
such as temperature/humidity fluctuations or
hazardous pollutants levels (Podgórski et al., 2017);
these insights can help reduce accidents and improve
overall workplace safety and the overall quality of the
product (Borghetti et al., 2021; Saqlain et al., 2019).
In many applications, one of the key parameters to be
monitored is the contact pressure or the exchange
force at the mechanical interfaces, whose measure
requires custom sensors to be developed. These
sensors can detect and measure pressure variations,
which are vital for applications ranging from
wearable devices to robotics. Over the years, a variety
of pressure transducers have been explored, including
piezoresistive, piezoelectric, capacitive, and optical
(Laszczak et al., 2015; Mannsfeld et al., 2010; Pan et
al., 2014; Persano et al., 2013; Ramuz et al., 2012;
Sun et al., 2020). Among these, capacitive pressure
sensors are particularly attractive due to their high
sensitivity, excellent repeatability, low power
consumption, and ability to function independently of
temperature variations (Chortos et al., 2016). On the
other hand, piezoresistive contact pressure sensors are
often easy to produce and use, require low power
consumption, and present a high sensitivity in the
low-pressure range (Gao et al., 2019). Both those
transduction principles can be explored and
developed on flexible and complex geometries using
additive manufacturing (AM). In fact, in recent years,
AM has emerged as a leading technology for
innovative fabrication and prototyping. Two of the
most commonly employed AM techniques are Fused
Deposition Modeling (FDM) and Stereolithography
(SLA). These techniques allow for the creation of
customized, complex geometries using a range of
polymeric materials, making them highly suitable for
the development of flexible and wearable pressure
sensors (José Horst & De Almeida Vieira, 2018). In
particular, FDM is a widely used 3D printing process
that involves the layer-by-layer deposition of
thermoplastic filament, to create a part both in
automotive, aviation and space (Wawryniuk et al.,
2024); this method is particularly useful for
producing robust and flexible components. On the
other hand, stereolithography (SLA) is a high-
resolution additive manufacturing technique that uses
ultraviolet (UV) light to cure photopolymer resins
layer-by-layer (Afridi et al., 2024); this process
allows for the creation of intricate and highly detailed
structures. In the development of contact pressure
sensors, SLA offers precision and flexibility, making
it a suitable choice for creating complex sensor
geometries. Moreover, SLA can be used with various
resins, including flexible materials, which are crucial
for wearable applications. This research aimed to
investigate various additive manufacturing polymers
for the development of contact pressure sensors with
potential applications in wearable devices, industrial
settings, and robotics. By exploring the properties of
different polymers and the advantages of both FDM
and SLA techniques, this work aimed to develop
highly customizable sensors that can adapt to the
specific needs of each application. The sensors
designed in this study are capacitive, meaning they
rely on the ability to measure changes in capacitance
when pressure is applied. In order to achieve resistive
behavior, two materials were selected to explore their
piezo-resistive capabilities. Moreover, a preliminary
microstructured device was fabricated using the SLA
resin to further enhance sensor performance,
particularly at low load levels.
2 MATERIALS AND METHODS
2.1 Materials Selection
In this work, a set of different polymers were taken
into account to provide different possibilities for
contact pressure sensors. In order to explore both
resistive and capacitive sensors, both conductive and
dielectric materials were specifically selected.
According to this idea, a flexible resin (SuperFlex
Clear, 3DMaterials, Gyeonggi-do, Republic of
Korea) for stereolithography (SLA) was selected and
mixed with 1% of carbon black (CB) in order to
obtain a resistive material; the CB loading was
limited by its dark color which can block the UV light
properly to properly sinter the resin itself. A second
conductive material is a CB-loaded thermoplastic
elastometer (TPE) provided by ALLOD
(Burgbernheim, Germany) in the form of a slab.
Moreover, a thermoplastic polyurethane (TPU)
filament for fused deposition modelling (FDM)
machines was employed. To further provide devices
with reduced stiffness that can present good
sensitivity at low loads, the SLA mentioned above
resin was used out of the box to produce a set of
microstructured devices; those devices are composed
of a set of unitary cells that can be modeled in 3D as
the combination of four 3D pyramidal structures
(Fapanni et al., 2024).
Analysis of Polymers for Additive Manufacturing: Based Contact Pressure and Force Sensors
181
2.2 Sample Preparation
Each material was prepared in 20 x 20 mm samples
with a thickness ranging from 1.7 mm to 3 mm
according to the different production techniques used.
The samples produced with the superflex resin were
produced using a stereolithographic printer Photon
Mono M5s, by Anycubic. The devices in TPU were
printed with an FDM printer, while the TPE slab was
cut in shape using a laser cutter. Then, in order to
provide easy electrical contact, copper tape was used
to cover the two 20 x 20 mm samples completely.
The tape was then shaped to provide a simple wiring
line with a taper, to avoid sharp edges that could
introduce undesired stray effects.
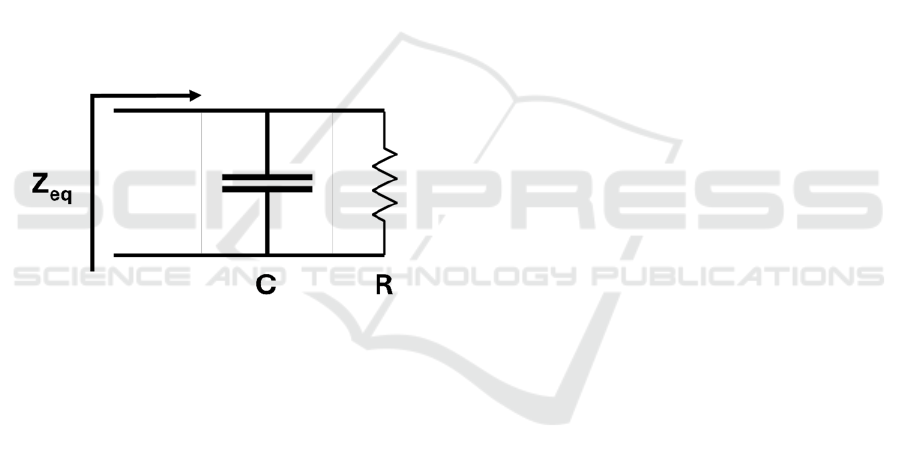
2.3 Sensor Electrical Model
From the electrical point of view, the devices can be
seen as a two-pole composed of a capacitor and a
resistor in parallel as shown in Figure 1.
Figure 1: Electrical reference model for the DUTs.
Considering mainly capacitive devices, it is
possible to consider the capacitance C proportional to
the surface area A of the devices, the relative
permittivity of the insulating layer ɛ
r
and the vacuum
permittivity ɛ
0
, while it is inversely proportional to
the device thickness, d, according to the relationship
C = (ɛ
0
ɛ
r
A)/d
(1)
It is thus possible to modify the capacitance of the
device, by changing either the thickness of the device
(e.g. by applying a load to compress the device) or
changing the relative permittivity of the device due to
the applied load (Fapanni et al., 2024). On the other
hand, for CB-loaded materials, the resistance is
provided by creating an electrical path between the
plates thanks to the conductive CB particles (El
Hasnaoui et al., 2012). When the device is
compressed, the internal disposition of the CB-
particle network is modified, leading to variations in
the resulting resistance (Oh et al., 2022).
2.4 Experimental Setup
In order to characterize the devices as contact
pressure sensors, the experimental setup was
simplified by choosing to monitor the applied load,
which then needs to be converted into pressure by
considering the device surface area. According to
this, an Instron test system (model 3366) equipped
with a 10 kN load cell was used. The uniaxial
compression tests were performed at room
temperature with two planar compression platen with
a 8 cm diameter. A single load-unload cycle was
performed on a representative specimen for each
material. The crosshead speed was set at 0.2 mm/min.
For each material, the maximum load was selected
according to the outcome of preliminary tests. After
those, a single set of analysis were performed on each
material. For each test, the load vs crosshead
displacement curve and the electrical capacitance and
resistance signal were recorded over time. To
measure the relevant electrical components, an MFIA
500 kHz Impedance Analyzer (Zurich Instruments)
was interfaced with a laptop via a custom script. The
device was configured to sample the impedance of the
device at 10 kHz and to provide its equivalent
resistance and capacitance according to the model in
Figure 1.
3 RESULTS AND DISCUSSION
The mechanical and electrical behavior of the systems
was evaluated by referring to the loading curves (load
vs displacement) and the calibration curves
(capacitance/resistance vs load), respectively. For
both approaches, the hysteresis parameter, calculated
as the ratio between the maximum difference on the
Y-axis between the loading and unloading path, and
the maximum variation on the Y-axis, was
determined. Further, the single-cycle residual
deformation at the very end of the unloading phase
was evaluated. This means that the medium-long time
viscoelastic response of the material was not taken
into account at this stage. Finally, for the electrical
calibration curves, an average sensitivity was
estimated, considering the slope of the second line
through the terminal points.
BIODEVICES 2025 - 18th International Conference on Biomedical Electronics and Devices
182
3.1 TPU
This first material that was taken into consideration
(TPU) was designed as purely dielectric solid. Thus,
no piezoresistive effect was expected. Thanks to
previous tests, a maximum load of 900 N was applied.
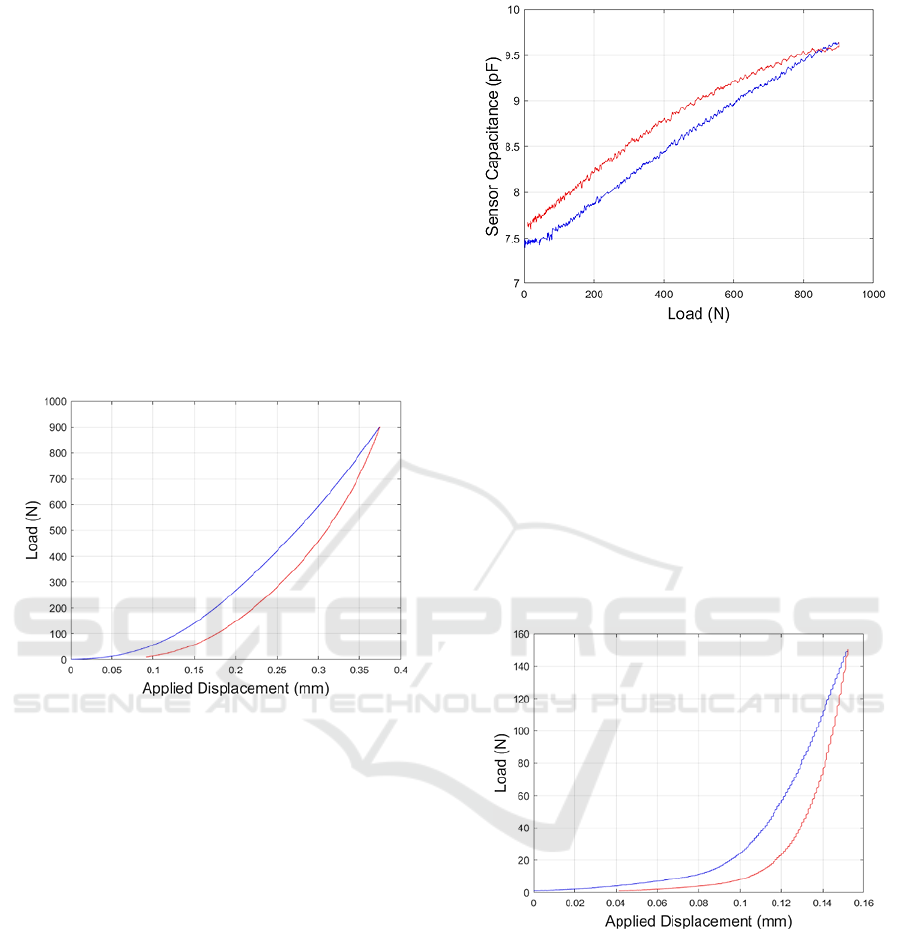
Considering the load-displacement curve (Figure 2),
the system shows a good linear elastic response, after
an initial transient region caused by imperfect
specimen-plate contact. In this sample, it is possible
to observe a 15.5% hysteresis between the loading
and the unloading path; this phenomenon can be
related to the viscoelastic nature of the material, as
well as to its structure (a set of stacking layers as a
result of the FDM process). The residual deformation
of the system resulted in 5.4 %.
Figure 2: Load – displacement curve of TPU-based sample.
The blue and red graph depict the loading and unloading
respectively.
The capacitance-load curve is shown in Figure 3. It
is possible to observe a general increase of the
capacitance of 26.6% (2 pF), with an average
sensitivity of 2.5 fF/N. A hysteresis value of 17.4%,
mostly related to the mechanical properties of the
dielectric material, was observed. As hinted before, the
resistance variation is irrelevant and presents no
correlation with the applied load (average value > 50
MΩ).
3.2 TPE
A TPE loaded with CB was studied. According to the
conductive behavior of CB, it is possible to achieve a
piezoresistive system since, while applying different
loads, the different conductive primary particles are
arranged so as to generate different conductive paths.
Preliminary analyses on the material pointed out the
presence of the fully-developed linear elastic region
way before reaching 150 N, which was then selected
Figure 3: Capacitance – load curve of TPU-based sample.
The blue and red graph depict the loading and unloading
respectively.
as a threshold value for the tests. A hysteresis value
of 24.5% was observed. However, the increased value
concerning TPU did not result in a corresponding rise
in the residual deformation, which in turn decreased
to 2%. This means that 1) the hysteresis parameter
cannot be considered as an indicator of the dissipative
nature of the system; 2) the TPE is able to recover the
strain imposed better than the TPU immediately.
Figure 4: Load – displacement curve of TPE-based sample.
The blue and red graph depict the loading and unloading
respectively.
In Figure 5, the electrical behavior of the device
at different loads is shown. Considering the resistance
curve (Figure 5a), it is possible to observe its general
and non-linear increase from approximately 300 Ω up
to 900 Ω. In this frame, the device presents an average
3.8 Ω/N sensitivity that can allow only a simple
measurement of the applied load. However, it should
be noted that the behavior of the device is not
perfectly monotone. Thus, further inquiries should be
performed to gain a better understanding of the
Analysis of Polymers for Additive Manufacturing: Based Contact Pressure and Force Sensors
183
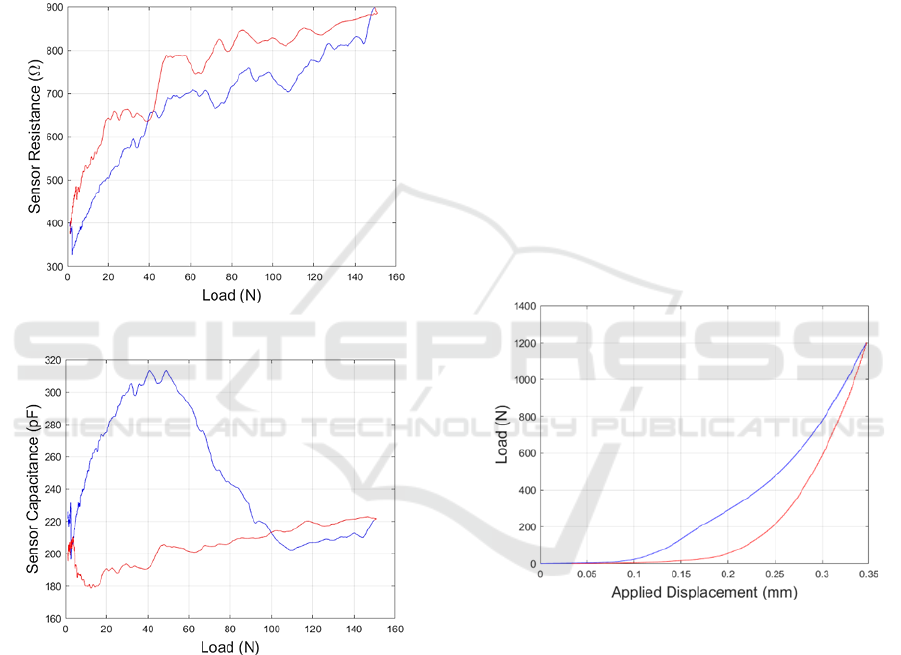
response and to determine whether it is related to the
material or the system and the experimental setup. In
these conditions, it is possible to observe a hysteresis
value of 26.1%. The device capacitance curve is
shown in Figure 5b. The response is highly non-
linear, with a non-monotone loading path. Thus, even
if the capacitance ranges approximately between 180
pF and 320 pF, the possibility of developing a
capacitance-based sensor is discarded, as a reliable
calibration line cannot be determined. For instance, it
presents hysteresis at up to 89.8%.
(a)
(b)
Figure 5: Resistance – load (a) and capacitance – load (b)
curves of the TPE-based sample. The blue and red graphs
depict the loading and unloading respectively.
3.3 SLA Resin with CB
The 1-cycle load-unload response of the SLA
superflex resin with CB is shown in Figure 6. The
mechanical response of the system presents some
deviations from the expected trend (see TPU and
TPE, for example), mainly due to the slope change at
around 200N. This is supposed to be related to the
complex nature of the system, characterized by
peculiar internal structuring due to the SLA
technique. A hysteresis value of 21.5% was
determined. The residual deformation at the end of
the smooth unloading phase proved to be 2.1%.
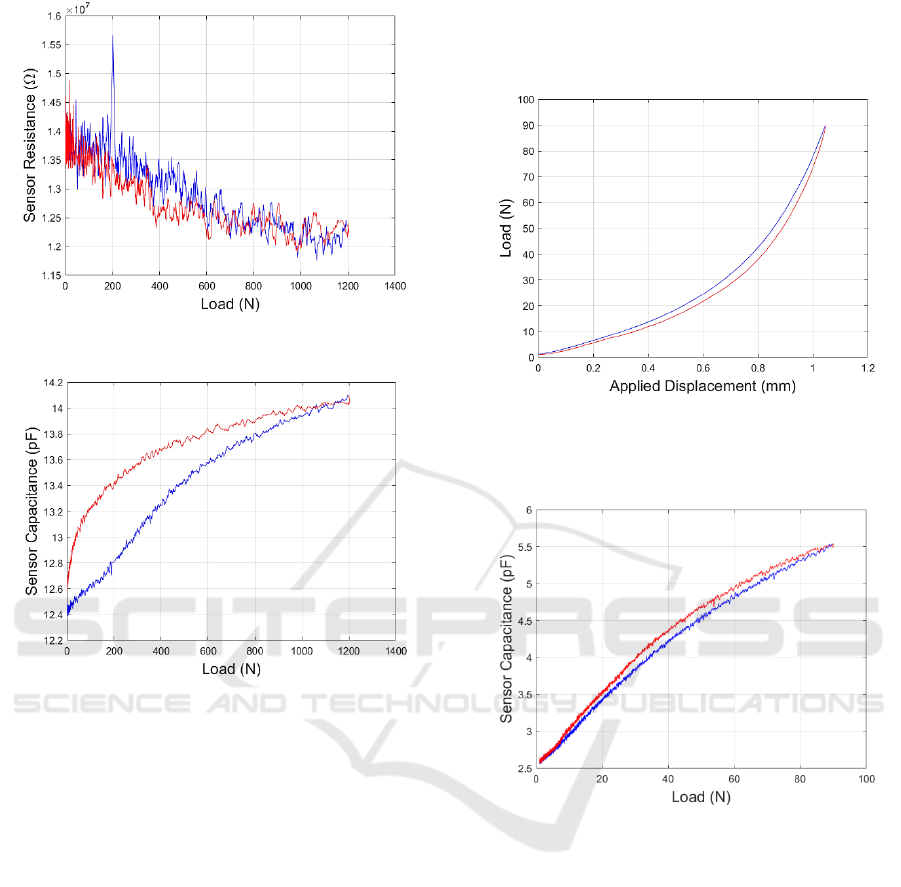
Considering electrical resistance (Figure 7a), it is
possible to observe a high average value over 10 MΩ.
This is related to the low (1%) loading of CB in the
material that the SLA production required. However,
it is possible to identify a satisfying trend that relates
the output resistance to the applied load with an
average sensitivity of -3.2 kΩ/N. It has to be noted
that the noisy nature of the signal could have
influenced the hysteresis value (42.9%). The electric
capacitance (Figure 7b) stays in the range between
12.4 pF to 14.1 pF, with an average sensitivity of 1.4
fF/N. Even though this sensitivity is relevant, it must
be noted that the achieved characteristics presents an
hysteresis value of 38.5% and that a great part of the
capacitance variation is presented at loads of less than
400 N, where the mechanical response is influenced
by system-related effects. According to these
observations the capacitive behavior of such device is
unfit for sensing applications.
Figure 6: Load-displacement curve of the sample produced
by the CB-loaded SLA resin. The blue and red graphs depict
the loading and unloading respectively.
3.4 Microstructured SLA Resin
With the aim to focus on low load values (< 100 N),
specific highly-compliant microstructured resin (the
same type used for CB-loaded systems examined at
3.3), structures, manufactured via the SLA process,
were studied. The mechanical response (Figure 8) is
characterized by a smooth monotonic growth without
any sign of discontinuity during the process. A
maximum load of 90 N was applied, which was
considered suitable from preliminary tests.
BIODEVICES 2025 - 18th International Conference on Biomedical Electronics and Devices
184
(a)
(b)
Figure 7: Resistance–load (a) and capacitance–load (b)
curves of the sample produced by the CB-loaded SLA resin.
The blue and red graphs depict the loading and unloading
respectively.
Interestingly, while being deformed to higher strains
(at least 3x, concerning the other materials), the
unloading phase is extremely similar to its loading
counterpart, leading to a small 6% hysteresis value.
Further, and even more interestingly, just 0.15% of
residual deformation was observed at the end of the
unloading path, suggesting the possibility for it to be
recovered at short times due to the viscoelastic nature
of the material. This suggests the possibility for this
system to be used in multi-cycle applications (at least
up to 90N). The capacitance (Figure 9) is in the order
of a few nF due to the reduced average relative
dielectric constant produced by the air-resin blend of
the dielectric. On the other hand, thanks to its
flexibility and reduced stiffness, the system is
characterized by a good sensitivity of 33.5 fF/N, with
a reduced hysteresis of 6.2%. Thus, the possibility of
fully recovering the deformation at low times and the
smooth capacitance calibration curve makes the
microstructured SLA resin a promising candidate for
low-load applications.
Figure 8: Load–displacement curve of the microstructured
sample. The blue and red graphs depict the loading and
unloading respectively.
Figure 9: Capacitance–load curve of the microstructured
sample. The blue and red graphs depict the loading and
unloading respectively.
4 CONCLUSIONS
In this work, a set of polymeric bulk and
microstructure materials were tested to inquire about
their capabilities to act as transducers in pressure and
force sensors. Among the possible ones, both
capacitive and piezoresistive transduction principles
were specifically examined. In general, it was
possible to underline a hysteretic behavior on all the
devices; this phenomenon is typical of polymeric
structures and was observed both on the mechanical
and the electrical characteristics. Interestingly, even
Analysis of Polymers for Additive Manufacturing: Based Contact Pressure and Force Sensors
185

though the hysteresis on the capacitance of the
devices has values slightly bigger (20.7% on average)
than the mechanical hysteresis (16.9 % on average),
the hysteresis of the resistance was generallly lower.
However, it is important to notice that between each
material considered, there were wide differences
ranging between the mechanical hysteresis of TPE
(24.5%) to one of the micro-structured devices
(5.9%). Considering the maximum available load, the
filled materials could withstand higher loads of up to
1200 N in general. On the other hand, the micro-
structured one was less stiff and could withstand up
to 90 N, with a stunning 13x increase in sensitivity
concerning TPU. This outcome suggests the
possibility of tuning the device stiffness and its
equivalent relative dielectric constant. Considering
these factors, it may be possible in future works to
produce specific devices with an increased sensitivity
even at low loads. Finally, the full recovery of the
deformation guaranteed by the microstructured
system makes it a promising candidate for multiple-
cycle applications, where this requirement is
mandatory. Even though some of these results are
already reported in the literature, the use of fully 3D
printed structures is still fairly uncommon (Sharma et
al., 2022; Zong et al., 2025). It is also relevant that the
achieved results in terms of sensitivity and working
range seems comparable to the ones reported in the
literature (Li et al., 2024; Zong et al., 2025), even
though further research is needed in order to fully
exploit the capabilities and flexibility of the proposed
approach.
ACKNOWLEDGEMENTS
This study was carried out within the MICS (Made in
Italy – Circular and Sustainable) Extended
Partnership and received funding from the European
Union Next-GenerationEU (PIANO NAZIONALE
DI RIPRESA E RESILIENZA (PNRR) – MISSIONE
4 COMPONENTE 2, INVESTIMENTO 1.3 – D.D.
1551.11-10-2022, PE00000004). This manuscript
reflects only the authors’ views and opinions, neither
the European Union nor the European Commission
can be considered responsible for them.
REFERENCES
Afridi, A., Al Rashid, A., & Koç, M. (2024). Recent
advances in the development of stereolithography-
based additive manufacturing processes: A review of
applications and challenges. Bioprinting, 43, e00360.
https://doi.org/10.1016/j.bprint.2024.e00360
Bianchini, D., Fapanni, T., Garda, M., Leotta, F., Mecella,
M., Rula, A., & Sardini, E. (2024). Digital Thread for
Smart Products: A Survey on Technologies,
Challenges and Opportunities in Service-Oriented
Supply Chains. IEEE Access.
https://doi.org/10.1109/ACCESS.2024.3454375
Borghetti, M., Cantu, E., Sardini, E., & Serpelloni, M.
(2021). Printed Sensors for Smart Objects in Industry
4.0. 6th International Forum on Research and
Technology for Society and Industry, RTSI 2021 -
Proceedings, 57–62.
https://doi.org/10.1109/RTSI50628.2021.9597209
Chortos, A., Liu, J., & Bao, Z. (2016). Pursuing prosthetic
electronic skin. Nature Materials, 15(9), 937–950.
https://doi.org/10.1038/nmat4671
El Hasnaoui, M., Triki, A., Graça, M. P. F., Achour, M. E.,
Costa, L. C., & Arous, M. (2012). Electrical
conductivity studies on carbon black loaded ethylene
butylacrylate polymer composites. Journal of Non-
Crystalline Solids, 358(20), 2810–2815.
https://doi.org/10.1016/j.jnoncrysol.2012.07.008
Fapanni, T., Rosa, R., Cantù, E., Agazzi, F., Lopomo, N.,
Rosace, G., & Sardini, E. (2024). Overall Additive
Manufacturing of Capacitive Sensors Integrated into
Textiles: A Preliminary Analysis on Contact Pressure
Estimation. Proceedings of the 17th International
Joint Conference on Biomedical Engineering Systems
and Technologies, 195–200.
https://doi.org/10.5220/0012597000003657
Gao, L., Zhu, C., Li, L., Zhang, C., Liu, J., Yu, H.-D., &
Huang, W. (2019). All Paper-Based Flexible and
Wearable Piezoresistive Pressure Sensor. ACS Applied
Materials & Interfaces, 11(28), 25034–25042.
https://doi.org/10.1021/acsami.9b07465
José Horst, D., & De Almeida Vieira, R. (2018). Additive
Manufacturing at Industry 4.0: a Review. In
International Journal of Engineering and Technical
Research (Issue 8). www.erpublication.org
Kortuem, G., Kawsar, F., Fitton, D., & Sundramoorthy, V.
(2010). Internet of Things Track Smart Objects as
Building Blocks for the Internet of Things.
www.computer.org/internet/
Laszczak, P., Jiang, L., Bader, D. L., Moser, D., & Zahedi,
S. (2015). Development and validation of a 3D-printed
interfacial stress sensor for prosthetic applications.
Medical Engineering & Physics, 37(1), 132–137.
https://doi.org/10.1016/j.medengphy.2014.10.002
Li, P., Zhang, Y., Li, C., Chen, X., Gou, X., Zhou, Y.,
Yang, J., & Xie, L. (2024). From materials to
structures: a holistic examination of achieving linearity
in flexible pressure sensors. In Nanotechnology (Vol.
36, Issue 4). https://doi.org/10.1088/1361-
6528/ad8750
Mannsfeld, S. C. B., Tee, B. C.-K., Stoltenberg, R. M.,
Chen, C. V. H.-H., Barman, S., Muir, B. V. O.,
Sokolov, A. N., Reese, C., & Bao, Z. (2010). Highly
sensitive flexible pressure sensors with
microstructured rubber dielectric layers. Nature
BIODEVICES 2025 - 18th International Conference on Biomedical Electronics and Devices
186

Materials, 9(10), 859–864.
https://doi.org/10.1038/nmat2834
Mendes, J. J. A., Vieira, M. E. M., Pires, M. B., & Stevan,
S. L. (2016). Sensor fusion and smart sensor in sports
and biomedical applications. In Sensors (Switzerland)
(Vol. 16, Issue 10). MDPI AG.
https://doi.org/10.3390/s16101569
Munirathinam, S. (2020). Industry 4.0: Industrial Internet
of Things (IIOT) (pp. 129–164).
https://doi.org/10.1016/bs.adcom.2019.10.010
Oh, J., Kim, D.-Y., Kim, H., Hur, O.-N., & Park, S.-H.
(2022). Comparative Study of Carbon Nanotube
Composites as Capacitive and Piezoresistive Pressure
Sensors under Varying Conditions. Materials, 15(21),
7637. https://doi.org/10.3390/ma15217637
Pan, L., Chortos, A., Yu, G., Wang, Y., Isaacson, S., Allen,
R., Shi, Y., Dauskardt, R., & Bao, Z. (2014). An ultra-
sensitive resistive pressure sensor based on hollow-
sphere microstructure induced elasticity in conducting
polymer film. Nature Communications, 5.
https://doi.org/10.1038/ncomms4002
Persano, L., Dagdeviren, C., Su, Y., Zhang, Y., Girardo,
S., Pisignano, D., Huang, Y., & Rogers, J. A. (2013).
High performance piezoelectric devices based on
aligned arrays of nanofibers of
poly(vinylidenefluoride-co-trifluoroethylene). Nature
Communications, 4.
https://doi.org/10.1038/ncomms2639
Podgórski, D., Majchrzycka, K., Dąbrowska, A.,
Gralewicz, G., & Okrasa, M. (2017). Towards a
conceptual framework of OSH risk management in
smart working environments based on smart PPE,
ambient intelligence and the Internet of Things
technologies. International Journal of Occupational
Safety and Ergonomics, 23(1), 1–20.
https://doi.org/10.1080/10803548.2016.1214431
Ramuz, M., Tee, B. C. K., Tok, J. B. H., & Bao, Z. (2012).
Transparent, optical, pressure-sensitive artificial skin
for large-area stretchable electronics. Advanced
Materials, 24(24), 3223–3227.
https://doi.org/10.1002/adma.201200523
Saqlain, M., Piao, M., Shim, Y., & Lee, J. Y. (2019).
Framework of an IoT-based Industrial Data
Management for Smart Manufacturing. Journal of
Sensor and Actuator Networks, 8(2), 25.
https://doi.org/10.3390/jsan8020025
Sharma, A., Ansari, M. Z., & Cho, C. (2022).
Ultrasensitive flexible wearable pressure/strain
sensors: Parameters, materials, mechanisms and
applications. In Sensors and Actuators A: Physical
(Vol. 347). Elsevier B.V.
https://doi.org/10.1016/j.sna.2022.113934
Sun, L., Jiang, S., Xiao, Y., & Zhang, W. (2020).
Realization of flexible pressure sensor based on
conductive polymer composite via using electrical
impedance tomography. Smart Materials and
Structures, 29(5), 055004.
https://doi.org/10.1088/1361-665X/ab75a3
Wawryniuk, Z., Brancewicz-Steinmetz, E., & Sawicki, J.
(2024). Revolutionizing transportation: an overview of
3D printing in aviation, automotive, and space
industries. The International Journal of Advanced
Manufacturing Technology.
https://doi.org/10.1007/s00170-024-14226-y
Zong, X., Zhang, N., Ma, X., Wang, J., & Zhang, C.
(2025). Polymer-based flexible piezoresistive pressure
sensors based on various micro/nanostructures array.
Composites Part A: Applied Science and
Manufacturing, 190, 108648.
https://doi.org/10.1016/j.compositesa.2024.108648
Analysis of Polymers for Additive Manufacturing: Based Contact Pressure and Force Sensors
187
