
Novel and Efficient Hyperdimensional Encoding of Surface
Electromyography Signals for Hand Gesture Recognition
Ancelin Salerno
a
and Sylvain Barraud
b
CEA, LETI, Minatec campus, University Grenoble Alpes, 38000 Grenoble, France
Keywords: High-Dimensional Computing, Surface Electromyography Signal, Gesture Recognition, Encoding,
Hypervectors, Ninapro Database.
Abstract: Gesture recognition has become a crucial component of human-computer interaction, with applications
ranging from virtual reality to assistive technologies. This study explores Hyperdimensional Computing
(HDC) as a powerful alternative to traditional machine learning techniques for real-time gesture recognition.
HDC is known for its robustness and efficiency, enabling fast and accurate classification though the use of
high-dimensional binary vectors. In this study, we introduce two key variants aimed at significantly improving
the performance of gesture recognition: (1) an enhancement of item memory representation enabling a better
gestures recognition, and (2) an advanced temporal encoding mechanism that captures the dynamic nature of
gestures more efficiently. These modifications are evaluated using a benchmark dataset of surface
electromyography (sEMG) signals, demonstrating significant improvements in both accuracy and
computational efficiency.
1 INTRODUCTION
Recent advances in the recognition and classification
of surface electromyography (sEMG) signals are
opening up new opportunities in fields such as
human-machine interfaces, robotic control, and
augmented/virtual reality. These advances rely
heavily on the accurate measurement of multi-
channel surface EMG signals and the application of
machine learning (ML) algorithms for gesture
identification. However, deploying ML models on
wearable edge devices presents both challenges and
opportunities. While edge computing enables real-
time processing with reduced latency and improved
privacy through on-device data handling, machine
learning models encounter significant challenges in
addressing the variability of sEMG signals (Hudgins
et al., 1993). Indeed, factors such as muscle fatigue,
electrode displacement, changes in arm posture, and
inter-subject/session variability can severely impact
classification performance, limiting the robustness of
conventional ML approaches.
Current neural network-based solutions, despite
their potential, are resource-intensive, requiring large
a
https://orcid.org/0009-0008-6432-4270
b
https://orcid.org/0000-0002-4334-9638
volumes of high-quality training data and incurring
substantial computational and power demands. This
makes their integration into embedded systems,
particularly challenging for real-time gesture
recognition (Hudgins et al., 1993; Benatti et al.,
2014). To address these issues, we introduce
CompHD; a novel hyperdimensional computing
(HDC) framework designed for the efficient encoding
and classification of sEMG signals in hand gesture
recognition.
Unlike traditional HDC methods, which rely on
random or continuous item memories for sequences
encoding (Rahimi et al., 2016; Sgambato &
Castellano, 2022), CompHD incorporates optimized
hyperdimensional representations that allow for more
efficient and accurate processing of gesture data. The
HDC-based brain-inspired architecture offers several
key advantages: it supports one-pass learning,
reducing energy consumption and accelerating the
learning process, while also being highly robust to
noise and computational errors. Moreover, CompHD
requires only a small training dataset to achieve
competitive accuracy, making it well suited for low-
power, real-time applications and most-importantly,
Salerno, A. and Barraud, S.
Novel and Efficient Hyperdimensional Encoding of Surface Electromyography Signals for Hand Gesture Recognition.
DOI: 10.5220/0013257500003911
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 18th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2025) - Volume 1, pages 763-772
ISBN: 978-989-758-731-3; ISSN: 2184-4305
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
763

for on-subject training, as sEMG data are highly
individual-specific.
For the first time, we present a comprehensive
quantitative comparison between the CompHD
algorithm and conventional machine learning models
for sEMG-based gesture recognition, using publicly
available datasets, including Ninapro—the largest and
most comprehensive sEMG database. Our evaluation
demonstrates that CompHD not only outperforms
traditional methods in terms of robustness and
computational efficiency, but also achieves
competitive accuracy on this challenging benchmark.
2 DATABASE DESCRIPTION
This study utilizes several publicly available
electromyography (EMG) datasets, including Master
(Rahimi et al., 2016), Pattern (Lobov et al., 2018),
Ninapro DB1, DB4 and DB5 (Atzori et al., 2012,
2014; Pizzolato et al., 2017; Wan et al., 2018). While
these datasets are commonly used for gesture
recognition tasks with various classifiers, we are the
first study to systematically compare them using the
same HDC model. The datasets differ in terms of the
number of gestures, subjects, sampling frequencies
and recording channels, providing a diverse and
comprehensive foundation for developing and
analyzing our HDC model for sEMG signals
recognition. They offer an opportunity to explore
different signal characteristics and patterns, thus
facilitating the development and evaluation of
machine learning models for gesture classification.
The key characteristics of these datasets are
summarized in Table 1.
Table 1: Number of gestures, subjects and channels
considered for each dataset used in this work.
The feature used in this work for gestures
classification is the Mean Amplitude Value (MAV)
which has been shown to be highly effective,
providing both high accuracy and computationally
efficiency (Scheme & Englehart, 2014).
Figure 1: Example of raw (a) and preprocessed (b) sEMG
signals of “Pattern” database. For further clarity, the sEMG
signals measured on 8 electrodes are shown for only one
repetition and only five gestures (including unmarked data).
The MAV is a widely used time-domain feature in
sEMG signals analysis. It represents the average of
the absolute values of the signal over a given time
window. In this study, we use 100ms windows. The
MAV is particularly effective at capturing muscle
activation patterns and is less sensitive to noise
compared to other features, making it well-suited for
applications such as prosthetic control. In the context
of sEMG data, where the frequency band of interest
typically ranges from 10 to 500 Hz, the MAV is
extracted following preprocessing steps such as
filtering to remove artifacts and baseline drift. For the
Ninapro DB1, this preprocessing can be performed
analogically before digitization to ensure that only
relevant muscle activation signals are captured. For
the other datasets, MAV extraction is conducted
using digital filters. This process involves summing
the absolute values of the signal within the specified
window and dividing by the number of samples,
providing a robust measure of the signal’s amplitude.
The MAV is particularly effective in detecting
changes in muscle activity levels, making it crucial
for real-time EMG signal classification.
MASTER
PATTERN
NINAPRO DB1
NINAPRO DB4
Gestures
number
Subjects
number
5
7
52
52
5
37
27
10
Database
Channels
number
4
8
10
12
NINAPRO DB5
52 10 16
BIOSIGNALS 2025 - 18th International Conference on Bio-inspired Systems and Signal Processing
764
3 HIGH-DIMENSIONAL
COMPUTING CLASSIFIER
The Hyperdimensional Computing (HDC) is an
emerging computational paradigm inspired by the
human brain's approach to processing information
and provides a robust, efficient framework for
managing data represented as high-dimensional
vectors, called hypervectors (HVs) (Kanerva, 2009;
Rahimi et al., 2017; Cohen & Widdows, 2015). The
central concept is to encode information in high-
dimensional vectors that capture rich and complex
patterns. Some mathematical preserving operations
are applied to process or retrieve information. As
information is distributed across all dimensions of a
hypervector, it is less susceptible to interference. This
holistic characteristic inherently enhances the
system’s robustness to noise and partial information
loss, as individual bit errors are unlikely to
compromise the encoded meaning.
3.1 Conventional HDC Encoding
This study specifically focuses on binary HVs, as
binary HDC provides significant energy efficiency
benefits and is particularly well-suited for embedded
device (Chen et al., 2022) or hardware-based in-
memory implementations (Abhijith & Shekhar, 2019;
Benatti et al., 2017; Karunaratne, et al., 2020, 2021;
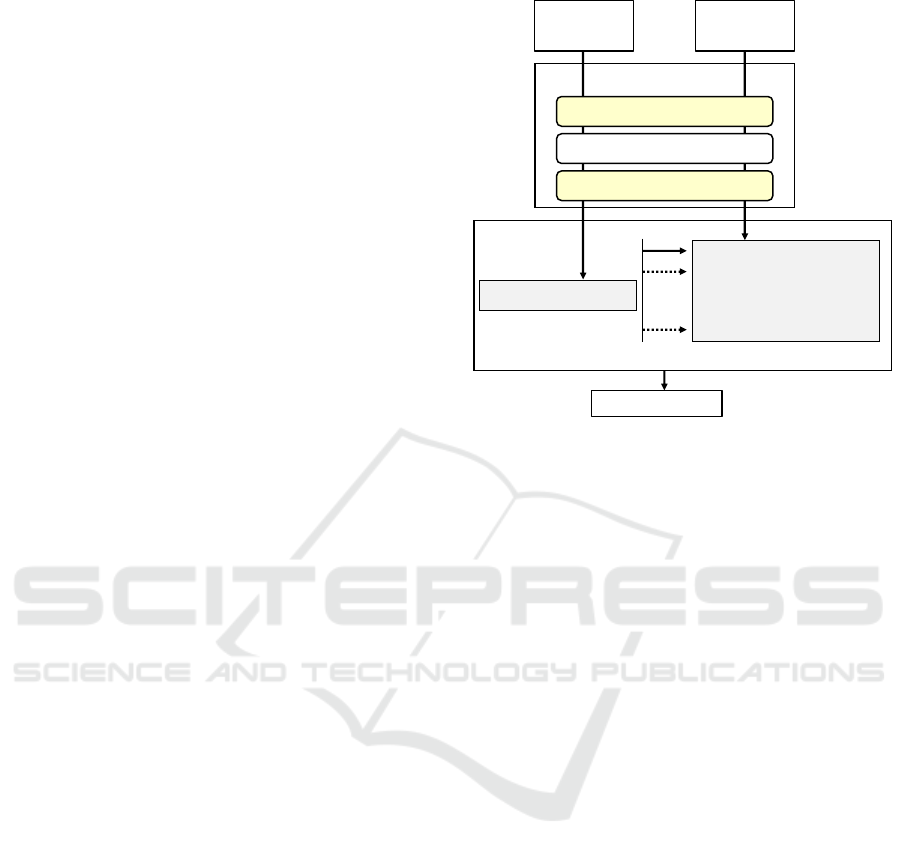
Li et al., 2016). Figure 2 illustrates the main
components of the HDC algorithm.
The newly highlighted areas correspond to the
specific blocks we have targeted to enhance the
model’s performance. At each stage of the
spatiotemporal encoding process, binary operations
are performed on binary hypervectors. These
operations are dimension-preserving, ensuring that
the dimensionality (DIM) remains consistent across
both the input and output vectors. The core operations
in hyperdimensional encoding — binding and
bundling (Rahimi et al., 2017, Cohen & Widdows,
2015) — enable the creation and manipulation of
complex symbolic structures.
• Binding: This operation combines two
hypervectors (HVs) to create a new one that is distinct
from both. Binding is performed using element-wise
multiplication (or XOR for binary vectors), ensuring
that the resulting hypervector is unique while still
preserving information from both of the original
hypervectors.
• Bundling: This operation combines multiple
hypervectors into a single hypervector that reflects
the common features of all the elements in the set.
Figure 2: Overview of HDC classifier for gesture
recognition accounting for the new HD mapping and
temporal encoder proposed in this work.
Bundling captures similarities among different
vectors representing related information and is
implemented using an element-wise majority
function across the set of hypervectors.
The bundling operation is essential for linking
temporal information across multiple hypervectors
from different timestamps. The hypervector resulting
from bundling n consecutive temporal hypervectors
is referred to as n-gram. In hyperdimensional
computing-based algorithms, n is a hyperparameter
commonly referred to as NGRAM. Both DIM and
NGRAM are critical hyperparameters that
significantly influence the model's performance.
NGRAM captures contextual relationships by
encoding local dependencies, with larger n-grams
offering richer contextual information at the expense of
increased complexity. DIM, on the other hand,
determines the dimensionality of the hypervectors used
to represent data in high-dimensional space. It typically
ranges from several thousand to as many as 10,000
elements. This high dimensionality ensures that
randomly generated vectors are almost orthogonal,
minimizing overlap and enhancing distinguishability.
A higher DIM typically offers greater capacity for
encoding and distinguishing patterns. However, it
requires more computational resources. Striking the
right balance between these parameters is key to
optimizing accuracy, efficiency, and generalization in
hyperdimensional computing systems.
• Class HV of Gesture #1
• Class HV of Gesture #2
…
• Class HV of
Gesture
#N
Similarity check
HD mapping (NEW)
Spatial Encoder
Temporal Encoder (NEW)
Testing
dataset
Learning
dataset
• Query HV (Gesture)
Classified Gesture
Spatio-Temporal Encoder
Preprocessed Signals
Associative Memory
Novel and Efficient Hyperdimensional Encoding of Surface Electromyography Signals for Hand Gesture Recognition
765
3.2 Our Spatio-Temporal Encoder
The first modification we propose involves the
spatiotemporal encoder. In surface electromyography
(sEMG) signal processing, the sequence order of
input data is generally less critical than in tasks like
text or speech recognition, where the position of each
element in a sequence significantly contributes to its
meaning. sEMG signals capture the electrical activity
of muscles during contractions, which typically
produce patterns based on muscle activation levels
rather than strict temporal order. As a result, models
for sEMG analysis can often focus more on feature
extraction and less on temporal dependencies
compared to language processing tasks. This
characteristic allows for the use of simpler
preprocessing techniques and makes certain machine
learning approaches, such as convolutional neural
networks (CNNs), particularly effective for
interpreting sEMG data. Instead of using the binding
operation to encode sequences—preserving both the
values and their order—we propose employing a
bundling operation to compute the mean vector over
a temporal window. This method enhances the
model's robustness to noisy sEMG signals, where
amplitude variability across time samples could
otherwise impair sequence encoding and compromise
signal interpretation.
3.3 Our Novel Composite Encoding
(CompHD)
In text recognition (Abhijith & Shekhar, 2019; Cohen
& Widdows, 2015; Rahimi et al., 2017), mapping
data to high-dimensional hypervectors that are
orthogonal ensures that letters or symbols are
equidistant from each other, preventing any bias in
the representation of specific characters. This
orthogonality is especially advantageous for discrete
classification tasks, where each character is treated as
a distinct entity. However, for continuous data such
as surface electromyographic (sEMG) signals, it is
crucial to capture subtle variations in signal amplitude
and frequency. In this case, projecting the data into
continuous hypervectors offers a more effective
representation of the continuous nature of sEMG
amplitudes (Cohen & Widdows, 2015; Rahimi et al.,
2016/2017; Salerno & Barraud, 2024).
In this case, the distance between hypervectors
should reflect the magnitude of the data, allowing for
smoother transitions and a more nuanced encoding of
continuous signal variations. This continuous
projection is better suited for tasks that require fine-
grained discrimination between data points, such as
analyzing muscle activation patterns in sEMG. Thus,
while orthogonal hypervectors are optimal for
discrete data like text, continuous hypervectors are
more appropriate for representing dynamic,
continuous signals like sEMG.
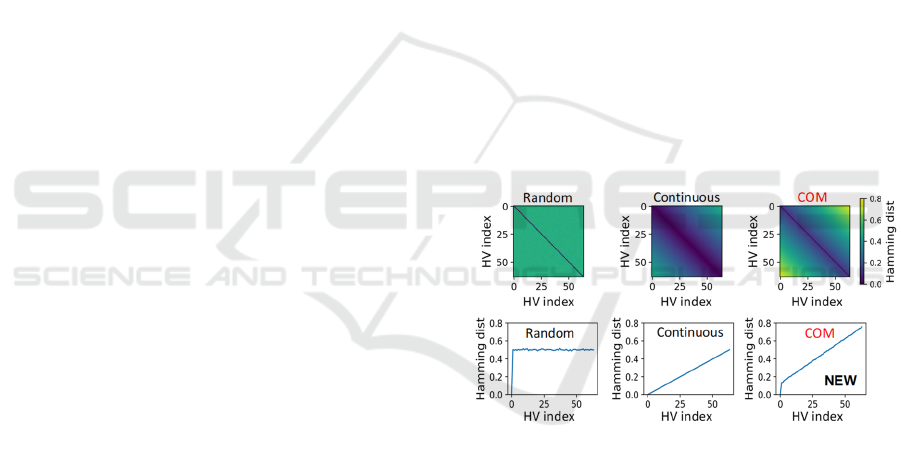
Mapping data into hypervectors using a
combination of random (i.e., orthogonal)
hypervectors and continuous hypervectors (Figure 3)
offers significant advantages for pattern recognition,
particularly in tasks where data points are highly
similar to previously encountered examples. This
approach leverages the high-dimensional properties
of hypervectors to encode information in a way that
enables fine distinctions between closely related data,
while still preserving the ability to generalize to
broader patterns.
By associating the distance between hypervectors
with differences in their index positions, this method
enhances the recognition of subtle variations in data,
making it highly effective for tasks that require both
precise identification of known patterns and
flexibility in adapting to new, unseen data. This dual
capability is especially valuable in applications like
biomedical signal processing, where small variations
can be critical, yet robust generalization is essential to
handle variability across subjects or conditions
Figure 3: HD mapping scheme used in this work. A new
HD mapping (COM) is proposed to encode the
preprocessed and quantized sEMG signals into binary
hypervectors. The hamming distance between two HVs is
calculated and compared to conventional Random and
Continuous mapping.
3.4 Leave-P-Groups-out
Cross-Validation
In this section, we outline the specific training and
testing procedures used for CompHD, including
dataset partitioning, cross-validation techniques, and
performance evaluation metrics to assess model
accuracy. To evaluate and compare the gesture
recognition rates for different training sizes while
maintaining temporal integrity of gestures repetitions,
BIOSIGNALS 2025 - 18th International Conference on Bio-inspired Systems and Signal Processing
766
the Leave-P-Groups-Out Cross-Validation (LPGO) is
an excellent choice. LPGO provides a robust
approach for evaluating machine-learning models in
scenarios where data is structured into distinct
groups, such as gesture repetitions in human activity
recognition. This technique systematically partitions
the dataset into smaller groups, such as repetitions,
ensuring that the temporal structure of the data is
preserved during validation. During the inference
phase, the model trained on the remaining groups is
tested on P small groups, known as the left-out
groups. The LPGO cross-validation process is
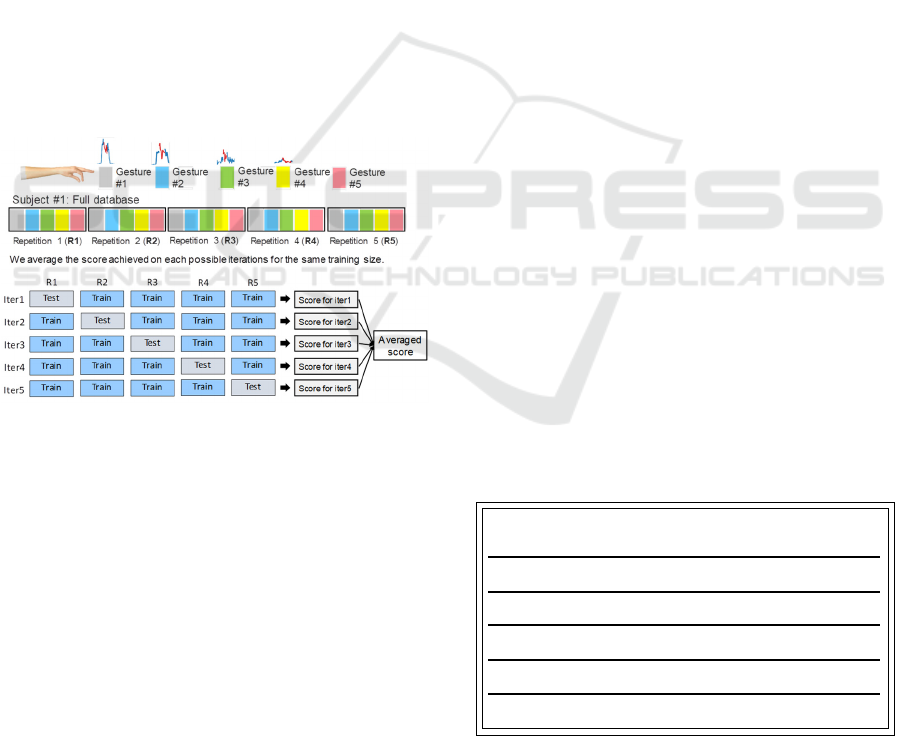
illustrated in Figure 4.
In the context of finite sets of gesture repetitions,
LPGO ensures that the model is evaluated exclusively
on unseen repetitions, as it is reinitialized at each
iteration. Thus, LPGO closely simulates real-world
variability in user performance. This technique is
particularly valuable for applications like prosthetic
control or gesture recognition, where consistent
performance across repetitions is crucial. By
assessing how well the model generalizes across
different instances of the same gesture, LPGO
provides insights into its robustness.
Figure 4: Protocol used for learning and testing phases.
Leave-P-groups-Out Cross-Validation method is applied to
use all the repetitions for both training and testing. In this
example P=1, which corresponds to a simple 5-fold Cross-
Validation.
4 EMG-BASED GESTURES
RECOGNITION
Using this training and testing protocol, we evaluated
the performance of three state-of-the-art hypervector
memory models: Random Item Memory (RIM),
Continuous Item Memory (CIM), and our composite
model, CompHD (COM), across the databases listed
in Table 1. This comparison allows us to assess the
strengths and limitations of each approach in the
context of gesture recognition, highlighting how
CompHD leverages the advantages of both RIM and
CIM to achieve enhanced performance. The results
are presented in order from the simplest (Master) to
the most complex database (Ninapro). This
organization allows us to clearly demonstrate the
model's effectiveness and robustness, highlighting its
adaptability across different gesture recognition
scenarios.
In Table 2, we present a summary of the database
gesture information and the optimal NGRAM value,
one of the key hyperparameters in our model. The
tuning of these hyperparameters involves identifying
a set of optimal parameter values for the HDC model,
aimed at maximizing performance (i.e., recognition
accuracy) while minimizing memory resource
allocation. Higher-dimensional hypervectors are
critical as they help prevent data loss during
encoding. Several hyperparameters in HDC require
fine-tuning, including the NGRAM value, which
determines the number of bundled hypervectors
during temporal encoding, and the dimensionality
(DIM) of the hypervectors.
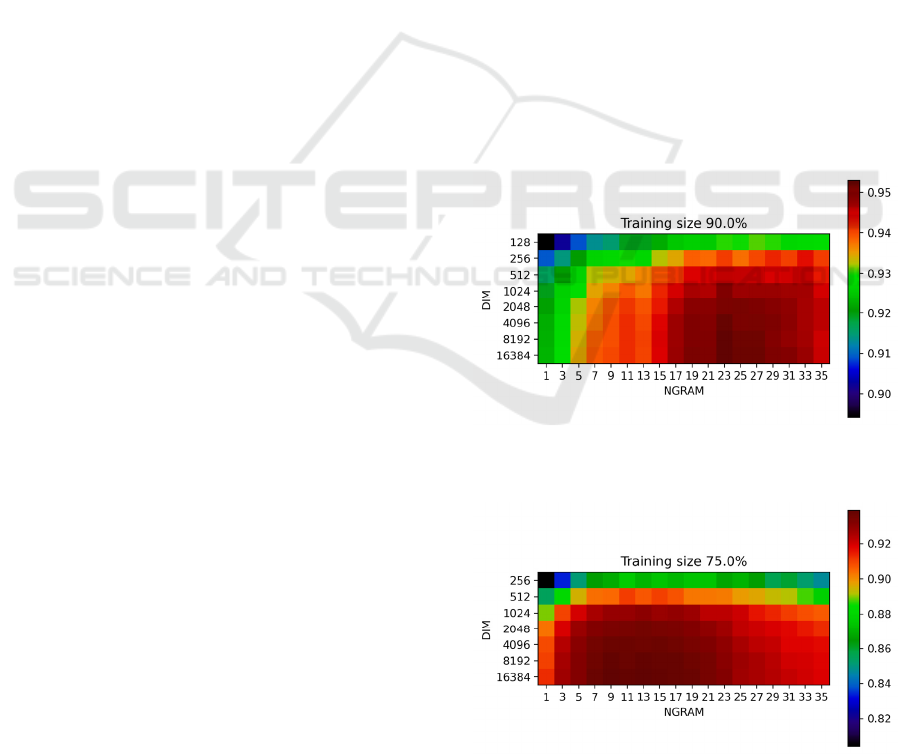
To optimize these hyperparameters, we conducted
an extensive Grid search across different NGRAM
values and dimensionalities. The tuning process
involved computing the average performance score
for various combinations of NGRAM and DIM.
Specifically, we evaluated these parameters using a
2D heatmap (see Appendix), which allowed us to
visualize the relationship between the dimensionality
and the NGRAM value. From this analysis, we
identified the optimal parameter set that maximized
the performance score for a given database, ensuring
the best possible recognition rate. These selected
values were then applied consistently across all
subjects in the database.
Table 2: Average gesture duration, optimal NGRAM and
dimension of HVs used for each database.
MASTER
PATTERN
NINAPRO DB1
NINAPRO DB4
Average gesture
duration (a.u.)
Optimal
NGRAM (a.u.)
26.5
17
25.08
37.06
25
9
41
51
Database
Dimension
of HVs
8192
16384
16384
16384
NINAPRO DB5
25.75 43 16384
Novel and Efficient Hyperdimensional Encoding of Surface Electromyography Signals for Hand Gesture Recognition
767
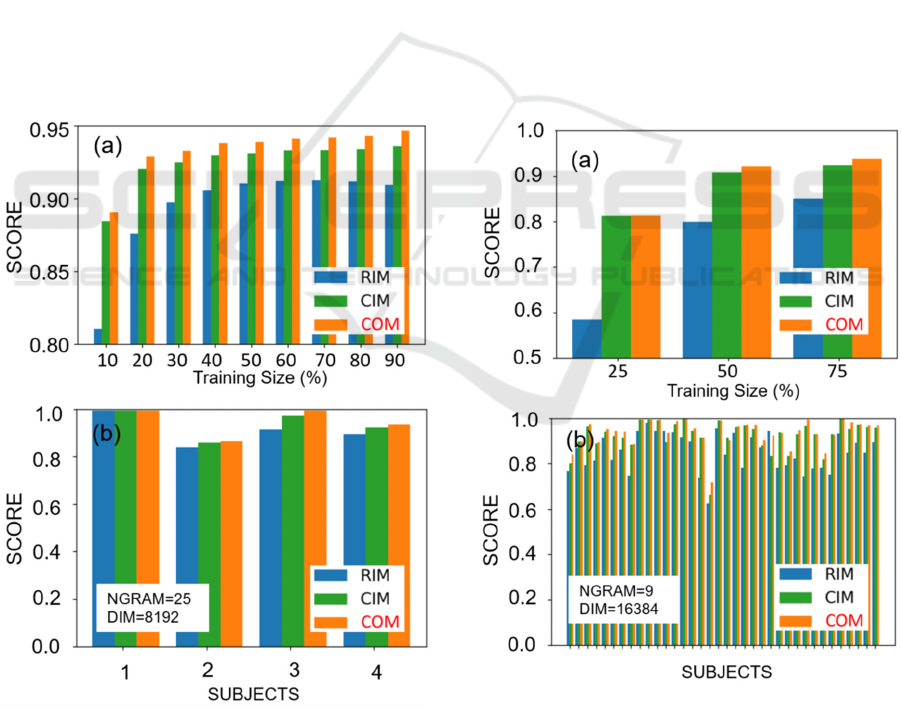
4.1 Master Database
The first database, known as the Master database,
contains ten repetitions of five gestures performed by
four subjects (with one subject excluded due to
inconsistent repetitions). In our study, the CompHD
model consistently outperformed both CIM and RIM
in classification accuracy across all training sizes.
Notably, CompHD achieved higher accuracy rates at
each incremental training size, demonstrating its
robustness on both small and large datasets. For some
subjects, CompHD’s classification accuracy reached
an impressive 99.9%, further highlighting its
precision in delivering accurate classifications across
subjects. This consistent advantage at every stage of
training establishes CompHD as a significantly more
effective model than CIM and RIM for achieving
high-accuracy classifications under various training
conditions. Remarkably, CompHD requires only 40%
of the training data to outperform both CIM and RIM,
even when larger training sizes (up to 90%) are used.
This underscores CompHD's superior efficiency and
effectiveness in gesture recognition tasks.
Figure 5: Master database. (a) Classification accuracy was
averaged across all subjects and gestures for different
training sizes. (b) Averaged accuracy achieved per subject
across all five gestures using the largest training size.
4.2 Pattern Database
The second database, known as the Pattern database,
includes four repetitions of seven gestures performed
by 36 subjects. This dataset was recorded using eight
electrodes, providing a rich data source for analyzing
gesture recognition performance across diverse
subjects.
As with the previous database, the CompHD
model consistently outperformed both CIM and RIM
in classification accuracy across all training sizes.
Notably, CompHD achieved higher accuracy rates at
each incremental training size, demonstrating its
robustness on both smaller and larger datasets. For
some subjects, CompHD’s classification accuracy
reached an impressive 100%, further emphasizing its
effectiveness in delivering precise classifications
across different subjects.
This consistent advantage at every stage of
training reinforces CompHD as a significantly more
effective model than CIM and RIM for achieving
high-accuracy classifications under varied training
conditions.
Figure 6: Pattern database. (a) The classification
accuracy, averaged across all subjects and gestures, was
evaluated for different training sizes. (b) Averaged
accuracy achieved per subject across all seven gestures
using the largest training size.
BIOSIGNALS 2025 - 18th International Conference on Bio-inspired Systems and Signal Processing
768
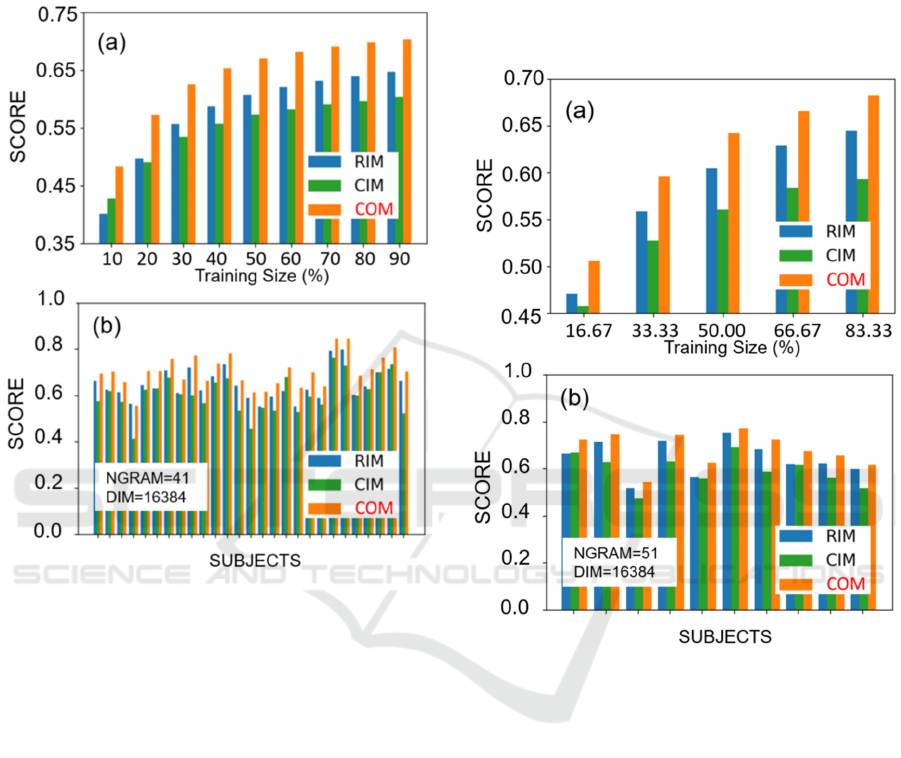
4.3 Ninapro Database 1
The third database tested, Ninapro DB1, includes ten
repetitions of 52 gestures performed by 27 subjects.
This dataset was recorded using 8 electrodes.
Figure 7: Ninapro DB1. (a) Classification accuracy was
averaged across all subjects and gestures for different
training sizes. (b) Averaged accuracy achieved by each
subject across all 52 gestures using the largest training size.
While RIM outperforms CIM with larger training
sizes, the reverse holds true for smaller sample sizes.
Despite this, the CompHD model consistently
demonstrated superior classification performance
across all training sizes compared to both CIM and
RIM. While the average score amongst subjects is
approximately 70%.
For some subjects, CompHD’s classification
accuracy reached an impressive 85%, further
highlighting its precision in delivering accurate
classifications across subjects, even with more
complex datasets. Notably, CompHD requires only
40% of the training data to outperform both CIM and
RIM, even when larger training sizes (up to 90%) are
used.
4.4 Ninapro Database 4
The fourth database tested, Ninapro DB4, includes six
repetitions of 52 gestures performed by 10 subjects,
recorded using 10 electrodes. As with the previous
databases, the CompHD model consistently
outperformed both CIM and RIM in classification
accuracy across all training sizes.
Figure 8: Ninapro DB4. (a) Classification accuracy was
averaged across all subjects and gestures for different
training sizes. (b) Averaged accuracy achieved by each
subject across all 52 gestures with the largest training size.
For some subjects, CompHD’s classification
accuracy reached nearly 80%, further emphasizing its
ability to deliver precise classifications across
different subjects. Notably, CompHD requires only
50% of the training data to achieve similar accuracies
as both CIM and RIM, even when larger training sizes
(up to 83.33%) are used.
The random Item memory (RIM) outperforms the
Continuous one (CIM) only on the Ninapro database
1 and 4. However, our new Composite Item Memory
(COM) is robust across all database and outperforms
both of the traditional item memories used.
Novel and Efficient Hyperdimensional Encoding of Surface Electromyography Signals for Hand Gesture Recognition
769

4.5 Ninapro Database 5
The fifth database: Ninapro DB5 includes six
repetitions of 52 gestures performed by 10 subjects
and was recorded using 16 electrodes.
Figure 9: Ninapro DB5. (a) Classification accuracy was
averaged across all subjects and gestures for different
training sizes. (b) Averaged accuracy achieved by each
subject across all 52 gestures using the largest training size.
Once again, the CompHD model demonstrated
superior classification performance across all training
sizes compared to both CIM and RIM. For some
subjects, CompHD’s classification accuracy reached
nearly 80%, further highlighting its efficacy in
delivering precise classifications across subjects.
Notably, CompHD requires only 50% of the training
data to outperform both CIM and RIM, even when
larger training sizes (up to 83.33%) are used.
Moreover, CompHD not only achieves better
accuracy than CIM and RIM, but the latter two
models also exhibit significant inconsistencies across
multiple databases. In contrast, CompHD has proven
its robustness across various datasets and training
sizes, consistently outperforming both CIM and RIM
in every case.
Beyond its impressive accuracy and robustness,
HDC (Hyperdimensional Computing) also
demonstrates notable resilience to errors, making it a
compelling choice for applications requiring fault
tolerance. This error resilience enhances HDC’s
suitability for real-world conditions in in-memory
computing, where environmental and electrical
variability, along with data imperfections, are
common challenges.
5 CONCLUSIONS
In this study, CompHD consistently outperformed
both state-of-the-art CIM and RIM, demonstrating
superior classification accuracy across all training
sizes while requiring significantly fewer samples.
This efficiency opens the door to embedded, on-
device training, reducing reliance on large,
centralized datasets and enabling more adaptive,
resource-efficient deployments.
CompHD’s robustness goes beyond performance;
it also exhibits resilience to data variability and
encoding errors, which is a critical advantage for real-
world applications that deal with imperfect data or
noisy environments. These qualities, combined with
its compatibility with low-complexity and massively
parallel operations, position CompHD as a highly
effective choice for embedded systems. Furthermore,
its high accuracy, efficiency, and fault tolerance make
it a promising candidate for in-memory computing
applications.
ACKNOWLEDGEMENTS
This project is supported by the “HDC” exploratory
Carnot project.
REFERENCES
Hudgins, B., Parker, P., Scott, R. N. (1993). A new strategy
for multifunction myoelectric control. IEEE
Transactions on Biomedical Engineering, vol.40(1),
82-94.
Benatti, S., Farella, E., Gruppioni, E., Benini, L. (2014).
Analysis of robust implementation of an EMG pattern
recognition based control. International Conference on
Bio-inspired Systems and Signal Processing 2014
BIOSIGNAL.
Rahimi, A., Benatti, S., Kanerva, P., Benini, L., Rabaey, J.
M. (2016). Hyperdimensional biosignal processing: A
case study for EMG-based hand gesture recognition.
Proceedings of the 2016 IEEE International
Conference on Rebooting Computing (ICRC), San
Diego, CA, USA, pp. 1-8.
BIOSIGNALS 2025 - 18th International Conference on Bio-inspired Systems and Signal Processing
770
Sgambato, B., Castellano, G. (2022). Performance
comparison of different classifiers applied to gesture
recognition from sEMG signals. In Bastos-Filho, T. F.,
de Oliveira Caldeira, E. M., Frizera-Neto, A. (Eds.),
XXVII Brazilian Congress on Biomedical Engineering.
CBEB 2020. IFMBE Proceedings, Vol. 83. Springer,
Cham.
Salerno, A., Barraud, S. (2024). Evaluation and
implementation of High-Dimensionnal Computing for
gesture recognition using sEMG signals. Proceedings
of the 2024 International Conference on Control,
Automation and Diagnosis (ICCAD)
Lobov, S., Krilova, N., Kastalskiy, I., Kazantsev, V.,
Makarov, V. A. (2018). Latent factors limiting the
performance of sEMG-interfaces. Sensors, 18(4), 1122.
Atzori, M., Gijsberts, A., Castellini, C., et al. (2014).
Electromyography data for non-invasive naturally-
controlled robotic hand prostheses. Scientific Data, 1,
140053
Atzori, M., et al. (2012). Building the Ninapro database: A
resource for the biorobotics community. Proceedings of
the 2012 4th IEEE RAS & EMBS International
Conference on Biomedical Robotics and
Biomechatronics (BioRob), Rome, Italy, pp. 1258-
1265.
Pizzolato, S., Tagliapietra, L., Cognolato, M., Reggiani, M.,
Müller, H., et al. (2017). Comparison of six
electromyography acquisition setups on hand
movement classification tasks. PLOS ONE, 12(10),
e0186132.
Wan, Y., Han, Z., Zhong, J., Chen, G. (2018). Pattern
recognition and bionic manipulator driving by surface
electromyography signals using convolutional neural
network. International Journal of Advanced Robotic
Systems, 15(5).
Scheme, E., Englehart, K. (2014). On the robustness of
EMG features for pattern recognition based myoelectric
control: A multi-dataset comparison. Proceedings of
the 2014 36th Annual International Conference of the
IEEE Engineering in Medicine and Biology Society,
Chicago, IL, USA, pp. 650-653.
Kanerva, P. (2009). Hyperdimensional Computing: An
Introduction to Computing in Distributed
Representation with High-Dimensional Random
Vectors. Cogn Comput 1, 139–159.
Widdows, D., Cohen, T. (2015). Reasoning with vectors: A
continuous model for fast robust inference. Logic
Journal of the IGPL, 23(2), 141-173.
Rahimi, A., et al. (2017). High-dimensional computing as a
nanoscalable paradigm. IEEE Transactions on Circuits
and Systems I: Regular Papers, 64(9), 2508-2521.
Chen H., Najafi, M. H., Sadredini, E., Imani, M. (2022).
Full Stack Parallel Online Hyperdimensional
Regression on FPGA. Proceedings of the 2022 IEEE
40th International Conference on Computer Design
(ICCD), Olympic Valley, CA, USA, 2022, pp. 517-524
Benatti, S., et al. (2017). A sub-10mW real-time
implementation for EMG hand gesture recognition
based on a multi-core biomedical SoC. Proceedings of
the 2017 7th IEEE International Workshop on
Advances in Sensors and Interfaces (IWASI), Vieste,
Italy, pp. 139-144.
Karunaratne G., Rahimi, A., L. Gallo, M., Cherubini, G.,
Sebastian A. (2021). Real-time Language Recognition
using Hyperdimensional Computing on Phase-change
Memory Array," IEEE 3rd International Conference on
Artificial Intelligence Circuits and Systems (AICAS),
Washington DC, DC, USA, 2021, pp. 1-1
Li, H., et al. (2016). Hyperdimensional computing with 3D
VRRAM in-memory kernels: Device-architecture co-
design for energy-efficient, error-resilient language
recognition. Proceedings of the 2016 IEEE
International Electron Devices Meeting (IEDM), San
Francisco, CA, USA, pp. 16.1.1-16.1.4.
Karunaratne, G., Le Gallo, M., Cherubini, G., Benini, L.,
Rahimi, A., Sebastian, A. (2020). In-memory
hyperdimensional computing. arXiv preprint,
1906.01548.
Abhijith, M., Shekhar, G. (2019). Language classification
technique using in-memory high dimensional
computing (HDC). Proceedings of the 2019 2nd
International Conference on Intelligent Computing,
Instrumentation and Control Technologies (ICICICT),
Kannur, India, pp. 293-298.
APPENDIX
Master DB: Heatmap showing the accuracy of our HDC
model for different HV dimensions (DIM) and NGRAM.
Pattern DB: Heatmap showing the accuracy of our HDC
model for different HV dimensions (DIM) and NGRAM.
Novel and Efficient Hyperdimensional Encoding of Surface Electromyography Signals for Hand Gesture Recognition
771
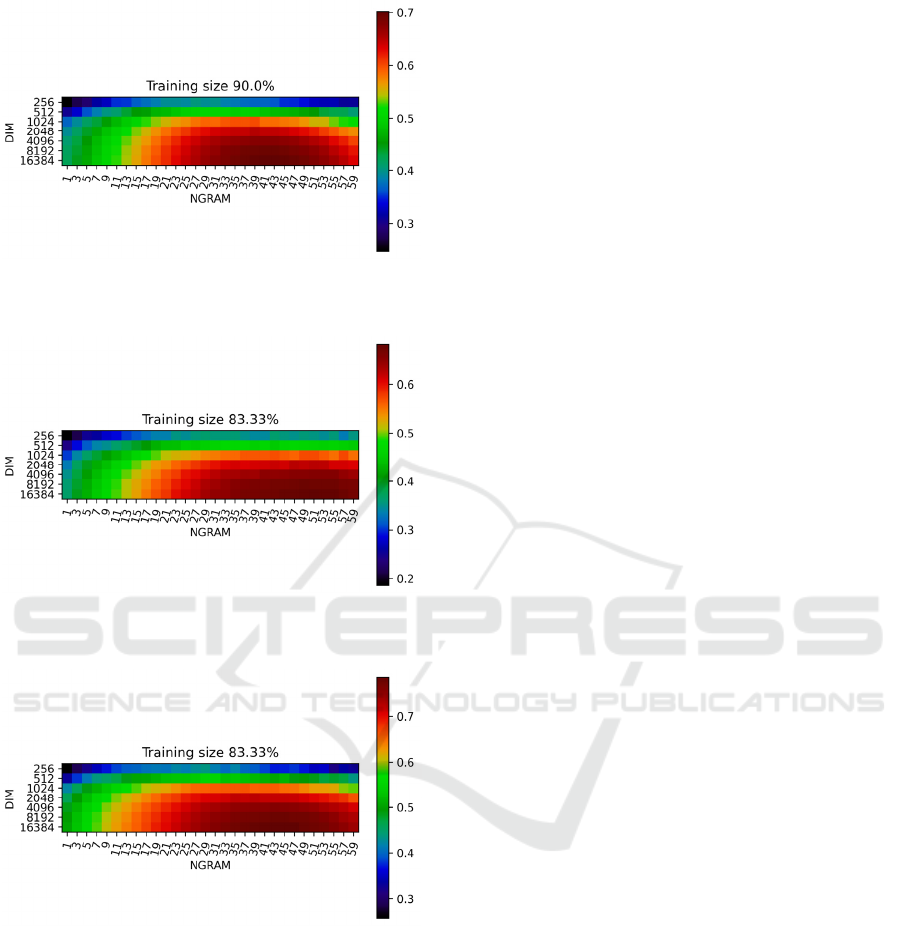
Ninapro DB1: Heatmap showing the accuracy of our HDC
model for different HV dimensions (DIM) and NGRAM.
Ninapro DB4: Heatmap showing the accuracy of our HDC
model for different HV dimensions (DIM) and NGRAM.
Ninapro DB5: Heatmap showing the accuracy of our HDC
model for different HV dimensions (DIM) and NGRAM.
BIOSIGNALS 2025 - 18th International Conference on Bio-inspired Systems and Signal Processing
772
