
Digital Twin System of Systems: A Layered Architecture Proposal
Meriem Smati
1,2 a
, Vincent Cheutet
1 b
, Christophe Danjou
2 c
and Jannik Laval
1 d
1
INSA Lyon, Universit
´
e Lumi
`
ere Lyon 2, Universit
´
e Claude Bernard Lyon 1,
Universit
´
e Jean Monnet Saint-Etienne, DISP UR4570, Villeurbanne, 69621, France
2
Laboratoire Poly-Industrie 4.0, D
´
epartement de Math
´
ematiques Et G
´
enie Industriel,
Polytechnique Montr
´
eal, Montr
´
eal, Qu
´
ebec, Canada
Keywords:
Digital Twins, System of Systems, Model-Driven Architecture (MDA), Model-Driven Engineering (MDE),
Dynamic Modeling.
Abstract:
Integrating Digital Twins (DTs) with Systems of Systems (SoSs) offers transformative potential for optimizing
complex, interconnected systems. However, implementing a DT for an SoS poses several challenges due to
the independence and diversity of Constituent Systems (CSs), as well as SoS-specific characteristics such
as geographic distribution, evolutionary development, and emergent behavior. This study proposes a novel
architectural framework for an SoS DT, featuring a layered design that combines individual DTs for each CS
with a global SoS DT layer to oversee and coordinate their interactions. By bridging limitations found in
standalone DTs, this structure enables a cohesive and adaptive digital representation of the SoS, addressing
the challenges of autonomy and extensibility. The framework aligns with fundamental SoS characteristics,
paving the way for enhanced system management, predictive analysis, and performance monitoring, while
also underscoring the need for a standardized metamodel to support resilient SoS DT development.
1 INTRODUCTION
A System of Systems (SoS) refers to a form of com-
plex systems wherein multiple, autonomous systems,
each with independently defined functions, operations
and objectives, cooperate to achieve a bigger com-
mon goal (Checkland, 1999). This interaction be-
tween Constituents Systems (CSs) not only improves
communication and interoperability but also creates
new capabilities that go beyond the sum of what each
system could achieve on its own (Maier, 1998). SoS
designs are widely used in areas like transportation,
defense, healthcare, and smart cities, where systems
are complex and sometimes critical and need to be
flexible, efficient and resilient to keep operations sta-
ble in changing situations (DeLaurentis, 2005).
Digital Twins (DTs) are a concept that were first
introduced by Michael Grieves in 2003 (Grieves and
Vickers, 2017) and since its creation, it has been de-
fined in numerous ways, including:
• “In the context of Industry 4.0, the Digital Twin
a
https://orcid.org/0009-0006-9399-3356
b
https://orcid.org/0000-0003-1920-2609
c
https://orcid.org/0000-0002-9575-0087
d
https://orcid.org/0000-0002-7155-5762
is introduced as a framework for mirroring cer-
tain aspects of the underlying physical entities in
the manufacturing processes” (Josifovska et al.,
2019).
• “A DT consists of a virtual representation of a pro-
duction system that is able to use sensory data,
connected smart devices, mathematical models,
and real-time data elaborations. The DT can be
run on different simulation disciplines that are
characterized by the synchronization of virtual
and real systems” (Tan et al., 2019).
• “A digital twin is a virtual representation of
a physical product or process, used to under-
stand and predict their performance.” (Rauch and
Pietrzyk, 2019).
• “The digital twin is an integrated system with
low-cost IoT sensors to gather system data, ad-
vanced data analytics to draw meaningful insights
and predictive maintenance strategy based on the
machine learning algorithm to reduce preven-
tive maintenance cost. Overall the digital twin
act as a digital replica of the field asset which is
monitored and maintained based on actual sensor
data from the physical field using machine learn-
ing.” (Bhowmik, 2019).
Smati, M., Cheutet, V., Danjou, C. and Laval, J.
Digital Twin System of Systems: A Layered Architecture Proposal.
DOI: 10.5220/0013258400003896
In Proceedings of the 13th International Conference on Model-Based Software and Systems Engineering (MODELSWARD 2025), pages 273-279
ISBN: 978-989-758-729-0; ISSN: 2184-4348
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
273

These abilities of mirroring, synchronizing, pre-
dicting and lowering maintenance cost made it gain
considerable traction and emerging as a crucial el-
ement in advances in different applications and do-
mains, such as Industry 4.0, aerospace and manufac-
turing (Broo et al., 2022) and this explains why DTs
have been chosen as the focus of this paper; specif-
ically, our objective is to represent a DT for an SoS
that can simulate, analyze, and predict the behavior
and performance of the SoS.
Implementing a DT of a SoS is challenging
due to the specific criteria and characteristics of
SoS, i.e operational and managerial independence of
CSs (Maier, 1998), varying levels of autonomy, scala-
bility and real-time data processing capability. There-
fore, these hurdles of heterogeneity and independence
have lead to propose a main research question (RQ)
which is: RQ: How can a DT be modeled to accu-
rately represent a physical SoS, aiming to enhance
resilience?
We divide this RQ into sub-questions:
• RQ1.1: Should the DT be a single, overarching
DT, or a collection of interconnected DTs for each
CS?
• RQ1.2: If a multi-DTs approach is adopted, is a
system of DTs enough to represent the SoS?
• RQ1.3: If a SoS DT cannot be represented by the
system of DTs, what additional layer is necessary
for accurate representation?
• RQ1.4: Is the proposed architecture consistent
with the fundamental characteristics of SoS?
The rest of this paper is organized and outlined herein.
Section 2 covers the related works on SoS and DT,
Section 3 introduces the proposed concept, followed
by a detailed description of the SoS DT in Section 4.
Section 5 presents theoretical use cases, and finally,
Section 6 concludes the paper with a discussion and
insights into future work.
2 RELATED WORK
The intersection of DTs and SoS has sparked sig-
nificant academic and practical interest, leading to a
growing body of literature that explores how these
two concepts can be integrated to enhance system ef-
ficiency, reliability, and functionality. Although many
articles touch upon DTs and SoS separately, only a
few delve into both concepts within the same study
especially for resilience purposes.
Broo et al. (Broo et al., 2022) have examined dif-
ferent existing DTs architectures and proposed a case
study of the design and implementation of a DT for
a smart infrastructure, in particular a railway bridge.
Even though the article highlights the importance of
adopting a SoS perspective in DT design, it does not
present the creation of a complete SoS DT. However
the case study highlights the essential considerations
for moving towards DTs capable of representing and
interacting with larger systems. Integration and ser-
vices are key elements of this vision.
On the same perspective of needing a DT of a SoS,
Demir et al. (Demir et al., 2023) explains how to cre-
ate a DT architecture for a SoS by proposing a holistic
framework for DTs that spans several hierarchical lev-
els, i.e product level, process level, system level and
SoS level. The aim of this architecture was to enable
rapid reconfiguration of production lines and dynamic
networks to adapt to new production requirements.
Pickering et al. (Pickering et al., 2023) does not
give precise instructions on how to create a DT of
a SoS. However, it does propose a concept, called
Modular Agritech Systems for Horticulture (MAS-
H), which could serve as a basis for developing such
an architecture in the horticultural field, and more
specifically for the kiwifruit industry in New Zealand.
This horticultural SoS DT offers a reduction in tech-
nology life-cycle costs, an improved collaboration
and data sharing, and aid in decision-making.
Azari and al. (Azari et al., 2022) consider a set of
interconnected cyber-physical systems (CPS) a SoS
and focuses on the use of Transfer Learning (TL) to
improve the resilience of the CSs. And the DT in this
context is used to host runtime models that reflect the
behavior of CSs in the SoS, provide data for training
TL-based predictive maintenance models and facili-
tate data and knowledge sharing.
Parri et al. (Parri et al., 2021) highlights a hard-
ware/software framework called JARVIS, designed to
improve the resilience of a CPS, particularly in the
contexts of smart cities and the Industrial Internet of
Things (IIoT). If we consider a CPS a SoS and al-
though the article does not provide a guide to creating
a DT architecture for SoSs, it offers valuable informa-
tion on how DTs can be used in such a context (such
as improving operation, integration, maintenance and
recoverability).
Olsson and Axelsson (Olsson and Axelsson,
2023) survey the current state of DTs in SoS, propos-
ing two architectures: one DT for the entire SoS or
individual DTs for each component. The monolithic
approach faces scalability, single-point failure, and
integration issues, while the distributed approach en-
counters interoperability, synchronization, and coor-
dination challenges.
Borth et al. (Borth et al., 2019) cites that im-
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
274

plementing DTs for cyber-physical SoS and IoT in-
stallations presents specific challenges due to the dy-
namic nature of SoS, the operational independence of
CSs and data sharing issues. To address these chal-
lenges, architectural strategies for SoS DTs can focus
on the upper echelons of the information hierarchy,
adopt a modular, causality-based approach to structur-
ing internal models, integrate reflection mechanisms
for self-assessment of performance, and utilize points
of loose coupling within the SoS for data connection
between digital and Physical Twins (PTs). The au-
thors mentioned that SoS DTs can help overcome the
challenges associated with SoS management, knowl-
edge management, unexpected emergent effects and
the additional costs associated with updates and up-
grades.
In summary, most articles address domain-
specific challenges and contributions related to ”SoS”
and ”DT” separately rather than focusing on develop-
ing a ”DT of a SoS”. Among those that do attempt
it, few succeed in establishing a metamodel or guide-
lines for creating an SoS DT.
3 INTRODUCING THE SoS DT
CONCEPT
In this section, we introduce an on-top architecture
designed to address the previously stated RQ, aligning
with the characteristics of both the SoS and the DT.
3.1 Adoption of a Multi-DTs Approach
for SoSs (RQ1.1)
As mentioned by Maier (Maier, 1998) ”A system-of-
systems is an assemblage of components which indi-
vidually may be regarded as systems”, and ”A system
that has operational and managerial independence of
its elements is a system-of-systems. But a system
composed of complex subsystems that do not have
both operational and managerial independence is not
a system-of-systems, no matter the complexity of the
subsystems”.
Operational independence is the ability of a sys-
tem to effectively function on its own and deliver
valuable services without relying on the larger sys-
tem. This means that even when separated from
the SoS, each component can fulfill its intended pur-
pose. And managerial independence denotes that CSs
are not only ”capable” of operating autonomously
but ”actively do” so. They are acquired and main-
tained separately, ensuring that they retain their oper-
ational capabilities independently of the overarching
SoS (Maier, 1998). And since the DT needs to mir-
ror the physical system which in this case is a SoS, a
multi-DTs approach must be adopted to match the
operational and managerial independence required on
the physical SoS since each CS is considered a fully
independent system working on its own, and this ex-
planation would justify and answer the sub-question
RQ1.1.
For a better explanation, Figure 1.A illustrates
two systems, S1 and S2, engaging in communication.
This interaction can be either bidirectional or unidi-
rectional based on specific requirements. Each system
communicates with its respective DT. Here, the pre-
viously mentioned criteria are respected on the digital
and physical side but at this stage, there is no SoS
present even though operational and managerial in-
dependence are respected; rather, there are only two
individual systems in communication due to the lack
of common objective or objectives.
3.2 The Limitations of a System of DTs
in Representing a SoS DT (RQ1.2)
To address RQ1.2, we consider a simple SoS con-
sisting of two CSs, as illustrated in Figure 1.B, each
System has its own DT with the bidirectional medium
for an effective communication between the physical
and digital asset and a common objective is shared be-
tween S1 and S2. On the digital side, if this commu-
nication is mirrored between DT1 and DT2, a System
of DTs is established. For improved clarity, we define
the system of DTs as ”a system that compromises the
digital replicas of CSs that interact with each other at
a software level to mirror the behavior of the physical
communication”.
The system of DTs could be sufficient to represent
to replicate the SoS, given that it comprises only a
few systems and the communication is not complex.
For example, the communication between S1 and S2
could simply be represented by a MQTT
1
, Kafka
2
or
any other type of communication protocol that can
replicate the behavior of the physical interaction dig-
itally depending on the data types.
Nevertheless, there are scenarios where a system
of DTs is inadequate to fully represent the SoS. For
example, when a system within the SoS communi-
cates simultaneously with multiple other systems to
achieve the shared objectives, several critical ques-
tions arise:
• Is the computational power sufficient?
1
https://mqtt.org/
2
https://kafka.apache.org/
Digital Twin System of Systems: A Layered Architecture Proposal
275
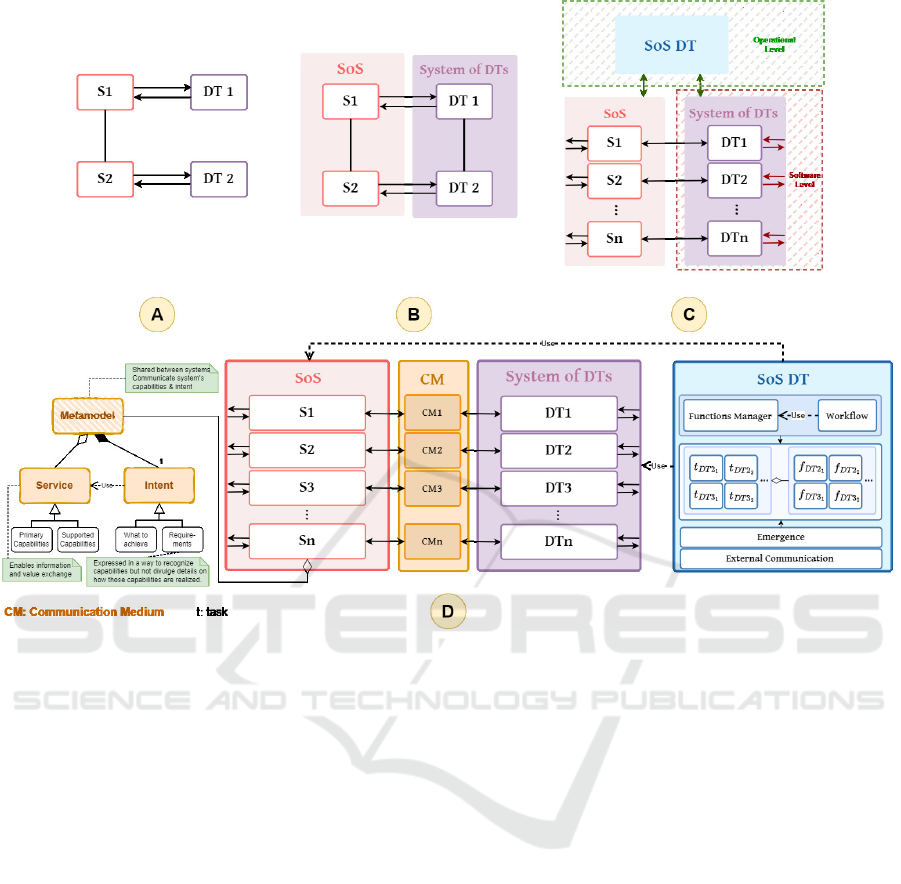
Figure 1: A. Communication Between Two Systems and Their Corresponding Digital Twins — B. A Simple SoS Composed
of Two CSs Communicating with the System of DTs — C. SoS DT Architecture Proposal — Detailed SoS DT Architecture.
• Are only the permitted resources for sharing
granted ?
• Is a specific type of communication medium ade-
quate to represent all physical communications?
• What if different data types are involved?
At this level of complexity, a system of DTs, of Fig-
ure 1.B, alone cannot effectively represent the SoS
DT.
3.3 The Key Contribution Needed for
Accurate Representation of a SoS
(RQ1.3)
To answer the questions mentioned in the Subsec-
tion. 3.2 and the sub-question RQ1.3, a new layer
is introduced which is the SoS DT as shown in Fig-
ure. 1.C.
The SoS is composed of multiple CSs each po-
tentially engaging in either unidirectional or bidirec-
tional communication with other CSs. In this setup,
each CS interacts directly with its corresponding DT.
When the communication, on a software level, is es-
tablished, each DT becomes a constituent DT of the
system of DTs. However, due to the complexity of
such systems and to fully address previously men-
tioned limitations, i.e resource constraints, commu-
nication mediums, and data diversity, an additional
overarching layer, the SoS DT, becomes necessary.
The SoS DT serves as the ”master,” ”manager,” or
”orchestrator” of the system of DTs, overseeing and
coordinating interactions to ensure effective and co-
hesive functioning across the entire SoS. This orches-
tration layer provides an integrated control mecha-
nism, facilitating streamlined data flow, efficient re-
source allocation, and synchronized operations within
the SoS.
4 ENSURING ALIGNMENT OF
THE PROPOSED
ARCHITECTURE WITH CORE
SoS CHARACTERISTICS
(RQ1.4)
Aside from the indisputable characteristics mentioned
by Maier in (Maier, 1998) (operational and manage-
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
276

rial independence), other characteristics have been
mentioned by (Andrew and Christopher, 2001) that
the SoS DT needs to validate as well to be considered
the replica of a physical SoS, these additional char-
acteristics are: geographic distribution, evolutionary
development and emergent behavior. To verify this
matter, let us introduce the more detailed version of
the proposition presented in Figure.1.D.
As explained previously, the SoS represents the
communication among various existing or newly es-
tablished systems. This communication on the phys-
ical side is governed by contractual agreements be-
tween the involved CSs. This agreement is depicted
on the left side of the Figure.1.D wherein (Harbor and
Research, 2024):
• A system conforms to a metamodel which is a
framework that defines the standard structure and
behavior for describing services, intents, and ca-
pabilities within a system. It ensures consistency
and interoperability across different components
and systems in a SoS.
• A service that is shared via the metamodel is a dis-
crete unit of functionality offered by a system that
can be consumed by other systems. It is modular
and designed to perform specific tasks within the
broader system.
• An intent refers to the desired outcomes or goals
that a service aims to achieve. It guides the service
in terms of what needs to be accomplished with-
out specifying how it should be done. It ensures
as well the alignment with the SoS objectives.
• Primary capabilities are the core tasks that a ser-
vice provides to achieve its intent.
• Supported capabilities are the additional function-
alities that a service can perform to enhance its
primary capabilities.
We add to this contract that CSs need to adhere to the
requirement of having a DT so that the creation of a
system of DTs would be possible, thanks to the es-
tablished communication medium that allows a bidi-
rectional flow between the CSs and constituent DTs.
Moving to the SoS DT that operates on the Opera-
tional Level that uses both the SoS and the System of
DTs, that work on the Software level, to accomplish
that master role it has. To do so, it is based on a work-
flow module that identify and extract tasks necessary
to achieve the SoS’s global objectives. And each task
is composed of several different functions. This in-
teroperability between tasks of constituent DTs give
emergence of new tasks and are integrated to the SoS
DT since they collaborate to the creation of the global
goal of the SoS. The concept of external communica-
tion is illustrated to represent the interactions among
multiple SoSs and their respective SoS DTs, but this
aspect is beyond the scope of the present paper.
Following the explanation of Figure 1.D, a verifi-
cation of the SoS criteria, presented in (Andrew and
Christopher, 2001), is conducted to assess whether
these criteria are also satisfied within the SoS DT
framework:
• Geographic Distribution: Systems are often ge-
ographically dispersed, operating over wide areas
and interacting through networks and communi-
cation systems. This criterion is verified in the
SoS DT and the SoS due to the modular pro-
posed architecture on both physical and digital
sides (system of DTs).
• Evolutionary Development: Systems can evolve
independently, allowing upgrades, modifications,
or replacements without impacting the overall
SoS. This adaptability is supported by operational
and managerial independence in both twins veri-
fied previously.
• Emergent Behavior: The SoS exhibits behaviors
and capabilities that emerge from the interactions
between CSs, providing greater functionality than
the systems could achieve individually. This con-
cept of emergence is reflected in the two level
of communications (software level, operational
level) and is explicitly presented by the module
”Emergence” in the SoS DT.
5 THEORETICAL
ILLUSTRATIONS
To illustrate and clarify the proposition, let us assume
that the SoS DT is applied for resilience purposes.
Here are some potential scenarios and theoretical use
cases:
• Scenario 1 – Failover Mechanism in Response to
System Outage: Within a SoS framework, un-
expected failures of CSs can impact the over-
all performance and resilience. In such cases,
the SoS DT autonomously detects disruptions
through real-time data analysis and triggers a
failover protocol by engaging the corresponding
DTs to replace the CSs down allowing the perfor-
mance to stay at a ”stable” level.
• Scenario 2 – Response to Unknown Disturbance
Impact: Assuming a disturbance has occurred, but
its impact on the overall performance of the SoS
is unclear. In response, the SoS DT engages con-
cerned constituent DTs, guiding them on appro-
priate actions, i.e whether to absorb, adapt, or re-
Digital Twin System of Systems: A Layered Architecture Proposal
277

cover (Francis and Bekera, 2014), to uphold the
performance.
• Scenario 3 – Adaptive Response to Environmental
Changes: In complex systems such as a smart city
SoS, CSs (e.g. traffic management, public trans-
portation, emergency services) must adapt to en-
vironmental changes such as severe weather con-
ditions. The SoS DT continuously monitors envi-
ronmental parameters and communicates with the
System of DTs to allow them help the physical SoS
adapt its behavior in response.
6 CONCLUSION
SoS DTs represent a promising frontier in advancing
the monitoring and control capabilities for complex,
multi-system environments, specifically SoS. By es-
tablishing a virtual counterpart for each CS within an
SoS, DTs enable comprehensive real-time insights,
improving operational decision-making and perfor-
mance management. However, the challenges asso-
ciated with SoS DTs are significant. The SoS DT
architecture showcases the need for modularity and
scalability. Since each CS can evolve independently,
added or replaced without disrupting the overall SoS,
the digital side must accommodate to these changes
seamlessly. A multi-DT approach, i.e each CS has its
respective DT, provides a solution for managing this
complexity, but maintaining the synchronization be-
tween the SoS DT, the System of DTs and the SoS,
could be seen as a potential challenge since it is im-
portant to accurately replicate the SoS behavior.
Another challenge could be the interoperability
between constituent DTs of the system of DTs as well
as the communication between the system of DTs.
Each CS may operate on different protocols, use var-
ious data formats, and have unique communication
requirements. In a ”perfect” DT scenario, interop-
erability is assumed to function without interference
or error. Nevertheless, practical implementations of-
ten face challenges related to data integration, com-
patibility between heterogeneous systems, and net-
work latency. Addressing these issues requires robust
communication standards and protocols that facilitate
seamless data exchange while ensuring the fidelity of
information being transmitted across the SoS.
In this paper, we assumed a ”perfect” DT scenario,
where disturbances affect only the physical SoS. This
idealized view highlights the potential of SoS DTs
while underscoring the need for robust architectures
capable of addressing real-world communication and
interoperability issues.
Future work will focus on adapting the architec-
ture for resilience matters and addressing the afore-
mentioned challenges through rigorous testing on sev-
eral real use cases. This is essential to uncover poten-
tial issues related to implementation, integration, and
operation. By doing so, we can also evaluate whether
the proposed architecture is generic enough to be
applicable across various use cases, as DTs are of-
ten driven by specific use-case requirements (G
¨
ollner
et al., 2022).
REFERENCES
Andrew, S. and Christopher, C. (2001). On the systems en-
gineering and management of systems of systems and
federations of systems. Journal of Systems Engineer-
ing, 21(4):325–345.
Azari, M. S., Flammini, F., and Santini, S. (2022). Im-
proving resilience in cyber-physical systems based on
transfer learning. In 2022 IEEE International Confer-
ence on Cyber Security and Resilience (CSR), pages
203–208. IEEE.
Bhowmik, S. (2019). Digital twin of subsea pipelines: con-
ceptual design integrating iot, machine learning and
data analytics. In Offshore Technology Conference,
page D011S010R004. OTC.
Borth, M., Verriet, J., and Muller, G. (2019). Digital twin
strategies for sos 4 challenges and 4 architecture se-
tups for digital twins of sos. In 2019 14th annual con-
ference system of systems engineering (SoSE), pages
164–169. IEEE.
Broo, D. G., Bravo-Haro, M., and Schooling, J. (2022). De-
sign and implementation of a smart infrastructure dig-
ital twin. Automation in construction, 136:104171.
Checkland, P. B. (1999). Systems Thinking, Systems Prac-
tice. John Wiley & Sons Ltd, Chichester, UK.
DeLaurentis, D. (2005). Understanding transportation as
a system-of-systems design problem. In 43rd AIAA
aerospace sciences meeting and exhibit, page 123.
Demir, O. E., Colledani, M., Teicher, U., Achour, A. B.,
Seidel, A., H
¨
anel, A., Yemane, A. T., Borzi, G. P., Uh-
lenkamp, J.-F., Eberlein, S., et al. (2023). Vertically
integrated digital twins for rapid adaptation of manu-
facturing value chains. In ECMS, pages 435–441.
Francis, R. and Bekera, B. (2014). A metric and frameworks
for resilience analysis of engineered and infrastruc-
ture systems. Reliability engineering & system safety,
121:90–103.
Grieves, M. and Vickers, J. (2017). Digital twin: Miti-
gating unpredictable, undesirable emergent behavior
in complex systems. Transdisciplinary perspectives
on complex systems: New findings and approaches,
pages 85–113.
G
¨
ollner, D., Rasor, R., Anacker, H., and Dumitrescu, R.
(2022). Collaborative modeling of interoperable digi-
tal twins in a sos context. Procedia CIRP, 107:1089–
1094.
Harbor and Research (2024). System of systems. Accessed:
2024-11-07.
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
278

Josifovska, K., Yigitbas, E., and Engels, G. (2019). A dig-
ital twin-based multi-modal ui adaptation framework
for assistance systems in industry 4.0. In Kurosu, M.,
editor, Human-Computer Interaction. Design Practice
in Contemporary Societies, pages 398–409, Cham.
Springer International Publishing.
Maier, M. W. (1998). Architecting principles for systems-
of-systems. Systems Engineering, 1(4):267–284.
Olsson, T. and Axelsson, J. (2023). Systems-of-systems
and digital twins: A survey and analysis of the current
knowledge. In 2023 18th Annual System of Systems
Engineering Conference (SoSe), pages 1–6. IEEE.
Parri, J., Patara, F., Sampietro, S., and Vicario, E.
(2021). A framework for model-driven engineering
of resilient software-controlled systems. Computing,
103(4):589–612.
Pickering, N., Duke, M., and Au, C. K. (2023). Towards a
horticulture system of systems: A case study of modu-
lar edge ai, robotics and an industry good digital twin.
In 2023 18th Annual System of Systems Engineering
Conference (SoSe), pages 1–8. IEEE.
Rauch, L. and Pietrzyk, M. (2019). Digital twins as a mod-
ern approach to design of industrial processes. Journal
of Machine Engineering, 19.
Tan, Y., Yang, W., Yoshida, K., and Takakuwa, S. (2019).
Application of iot-aided simulation to manufacturing
systems in cyber-physical system. Machines, 7(1).
Digital Twin System of Systems: A Layered Architecture Proposal
279
