
Hierarchical System of Digital Twins: A Holistic Architecture for Swarm
System Analysis
Mouhamadou F. Ball
1 a
, Jannik Laval
2 b
and Lo
¨
ıc Lagadec
1 c
1
Lab-STICC UMR 6285, ENSTA Bretagne, Brest, France
2
DISP-UR4570, Univ. Lyon, Univ. Lyon 2, Lyon, France
Keywords:
Digital Twin, Swarm System, Modeling, Holistic Architecture.
Abstract:
Swarm systems are being increasingly adopted for their operational capabilities and are now assigned more
sensitive missions, often in unpredictable environments. Therefore, it is crucial to evaluate their performance
in the face of natural or human-induced uncertainties before deployment and enhance their resilience during
missions. To enable a comprehensive analysis of this system, a multi-level analysis must be conducted to
capture the dynamics at the component, cluster, and swarm levels. Digital Twin (DT) offers a promising solu-
tion to address this challenge. While there are existing approaches that use digital twins to analyze complex
systems, they do not take into account the specific requirements introduced by swarm configuration. This
paper presents a holistic reference architecture, the Hierarchical System of Digital Twins (HSDT), which lays
the groundwork for creating digital twins of swarm systems. To support this framework, we introduce the
concepts of functional and aggregation hierarchies and propose a goal-oriented method for instantiating DT
with a specific level of sophistication. Additionally, we present a metamodel that integrates elements of the
Asset Administration Shell (AAS) data model to ensure interoperability with external standards. A prototype
of HSDT was developed, and a case study was presented, focusing on analyzing spatial parameters within a
swarm of Unmanned Vehicles (UVs).
1 INTRODUCTION
The swarm configuration of systems is an emerging
approach, adopted for its numerous advantages, such
as enhanced performance through load distribution,
easier scalability, and increased robustness (Liu and
Passino, 2000). Systems in swarm configuration can
be compared to systems of systems (SoS), as they
meet the properties presented by (Maier, 1998). This
configuration is beginning to be concretely adopted
for unmanned vehicles (UVs). For instance, the Eu-
ropean Union’s SCAF project for the future air force
is based on this configuration. Given the increas-
ingly critical missions assigned to this type of sys-
tem and its evolution in uncertain environments, it be-
comes essential to analyze it, study its behavior,and
implement strategies for performance enhancement.
Furthermore given the specifics of these systems, the
analysis must be conducted at different levels of ab-
straction (component, cluster, swarm) and from vari-
ous perspectives. The Digital Twin (DT) represents a
a
https://orcid.org/0009-0005-9245-2892
b
https://orcid.org/0000-0002-7155-5762
c
https://orcid.org/0000-0003-3778-3144
promising technology for addressing the challenges
of analyzing such systems. The literature presents
various approaches that leverage digital twins for ana-
lyzing complex systems (e.g., Cyber Physical System,
SoS). However, after defining the requirements for a
digital twin in the context of swarm systems, we ob-
serve that current architectures do not fully address
all of these requirements. This position paper aims to
address the research question: How can we design
a digital twin architecture that fulfills the funda-
mental requirements of swarm systems ?
In fact, to enable the full use of digital twins in the
analysis of swarm systems we need an architecture
that accommodates these types of systems. Therefore,
we propose an architecture for designing a hierarchi-
cal system of digital twins. We start by defining the
requirements of such digital twins based on the spec-
ifications of swarm systems, then propose a digital
twin structure rooted in a service-oriented approach,
and finally, the holistic architecture that leverages the
use of several digital twins in a hierarchy. Two types
of Digital Twins are introduced in this architecture,
forming its core: the Instance DT, which is directly
connected to reality, and the Aggregate DT, which is a
composition of multiple Digital Twins. Furthermore,
280
Ball, M. F., Laval, J. and Lagadec, L.
Hierarchical System of Digital Twins: A Holistic Architecture for Swarm System Analysis.
DOI: 10.5220/0013258900003896
In Proceedings of the 13th International Conference on Model-Based Software and Systems Engineering (MODELSWARD 2025), pages 280-287
ISBN: 978-989-758-729-0; ISSN: 2184-4348
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

we introduce a goal-driven method for the instantia-
tion of DTs. An event-based services synchroniza-
tion is also introduced to connect services between
DTs. To ensure interoperability with external tech-
nologies and integrate our architecture with current
DT standards, we propose a metamodel based on the
Asset Administration Shell (AAS) data model (Bader
and Maleshkova, 2019). So the architecture does not
only meet the requirements of swarm systems but also
enables the seamless integration of third-party com-
ponents, including emerging technologies in industry
4.0.
The paper is structured as follows: Section 2 pro-
vides a review of the existing literature on design-
ing digital twins for the analysis of complex systems.
Section 3 outlines the key requirements for designing
a digital twin system specifically for swarm systems.
Section 4 provides an overview of our implementation
approach, with Section 5 detailing the implementa-
tion and Section 6 presenting a basic case study. Fi-
nally, Section 7 concludes the paper.
2 BACKGROUND AND
PROBLEMATIC
Recent interest has grown in applying digital twins
to complex systems. In our review, we examine sev-
eral of these applications. The article (Human et al.,
2023) presents a six-step design framework that facil-
itates decision-making in the creation of a system of
digital twins with aggregation capabilities. It presents
a reference architecture as the foundation for these
systems, comprising three modules: an aggregation
hierarchy, a service network, and management ser-
vices. Inspired by SLADTA’s work (Redelinghuys
et al., 2020), It introduces two types of digital twins:
the DTI, representing digital twins directly linked to
the physical, and the DTA, which aggregates data
from multiple DTs. The data-based aggregation pro-
posed in the paper does not provide a reliable means
to capture emerging behaviors in the DTA, as it re-
lies solely on data. In (Reiche et al., 2021) the inte-
gration of multiple digital twins and the management
of their network are examined. This study proposes
an approach to merge multiple digital twins under the
governance of a single point of truth called the Dig-
ital Twin of a System (DTS). It presents a vision of
the digital twin as a composition of Digital Models
(DM) and an aggregation of Digital Shadow (DS).
However, the connection possibilities through DTS
do not include direct communications between what
they call subordinate digital twins, which is crucial in
swarm systems. Additionally, the combinations are
only made with DTs of the same level. The article
(Moyne et al., 2020) presents the concept of digital
twins by adopting an object-oriented approach. It en-
visions the digital twin as consisting of models with
a computational engine, connected through an associ-
ation with a cardinality of (1,*). They introduce the
notion of classes of digital twins and, using object-
oriented concepts such as generalization hierarchy, in-
heritance, and aggregation, they define possible com-
binations between different digital twins. This ap-
proach, based on object-oriented concepts, is quite
original and interesting. However, since multiple in-
heritance is not supported by default in the object-
oriented concept, it is impossible to have an entity
that allows for the abstract representation of a digi-
tal twin resulting from the aggregation of lower-level
digital twins from different classes. Thus with the
proposed framework, aggregation can only occur with
digital twins of the same type and level. The articles
(Zhou et al., 2023b; Zhou et al., 2023a) discuss the
implementation of a digital twin network for satellite
communication. They propose a hierarchical archi-
tecture, but it is limited to two levels: the edge-DT
and the central-DT. This restricted hierarchy does not
accurately reflect the configuration of swarm systems,
which can include multiple levels of hierarchy.
So far, the review indicates that while there are
existing architectures and methodologies for the use
of digital twins in complex systems, they generally
lack certain specifications and features necessary for
application in the context of swarm systems analysis.
3 REQUIREMENTS OF DIGITAL
TWIN ARCHITECTURE FOR
SWARM SYSTEMS
In this section, we will present the specific character-
istics and properties of swarm systems, along with an
example. Additionally, we will outline the design re-
quirements imposed by such systems for developing
a digital twin.
3.1 Specifications of Swarm Systems
Swarm system represent a paradigm in how au-
tonomous entities collaborate to achieve complex
tasks. Unlike traditional single-agent systems,
swarms operate as decentralized networks where indi-
vidual components, often equipped with sensors, ac-
tuators, and communication capabilities, interact lo-
cally to accomplish shared objectives. The following
figure 1 illustrates a simple configuration of a swarm
Hierarchical System of Digital Twins: A Holistic Architecture for Swarm System Analysis
281
of 2 thrusters surface drones during an escort mission.
Swarm systems have a unique configuration with sig-
nificant spatial and temporal dynamics, encompass-
ing some properties developed by (Maier, 1998) for a
system of systems (SoS). Below, we outline five key
characteristics of swarm systems that will guide our
vision for the digital twins of swarm systems.
• Managerial Independence: The components are
separately acquired and integrated but maintain
a continuing operational existence independent of
the swarm;
• Operational Independence: If the swarm is disas-
sembled into its components the components must
be able to usefully operate independently;
• Hierarchy: In the swarm, the concept of respon-
sibility suggests that the components might func-
tion at different levels and offer varying services;
• Geographic Distribution: The components of
swarm systems are often distributed within a
given space and exhibit a high spatiotemporal dy-
namic;
• Components Interaction: The components of a
swarm are subject to intense interactions, enabling
the emergence of collective behaviors.
Figure 1: A formation of surface marine drones performing
escort mission.
3.2 Requirements Definition
As presented by (Human et al., 2023) in their design
process of DT, a key step is the needs analysis, which
results in the creation of a list of requirements. In
their paper (Michael et al., 2022) authors list several
challenges related to the integration of digital twins
in a SoS context. These systems are similar to swarm
configurations, as, highlighted in the introduction, the
properties described in SoS are also present in swarm
configurations. They identify 15 key points to con-
sider for the integration of digital twins into a SoS.
We have identified and included key points essen-
tial to our objectives, along with additional aspects
based on the swarm specifications outlined in the pre-
vious section. Relevant requirements definition en-
sure that our architecture will be able to achieve the
expected abstraction. The following list outlines the
key requirements, emphasizing the design consider-
ations our system must fulfill as well as addressing
specific DT user concerns.
• Synchronization: The system must ensure data
synchronization between physical entities and
their corresponding digital twins, as well as be-
tween the digital twins deployed service;
• Hierarchical Structure: The different levels of
the physical world imply different levels of ab-
straction of functionality within the corresponding
DTs;
• Aggregation: The system should aggregate infor-
mation from lower-level digital twins to provide
a digital twin that offers a comprehensive view at
higher levels for advanced analysis;
• Interoperability: Achieving both syntactic and se-
mantic interoperability is essential for the digital
twins within this architecture and following the
existing standards;
• HMI (Human Machine Interface): Given the dif-
ferent levels of granularity, advanced views will
be necessary, allowing the user to perform either
a deep exploration of a component or the abstrac-
tion of a group of components.
4 HIERARCHICAL SYSTEM OF
DIGITAL TWINS (HSDT)
Based on the defined requirements outlined above,
this section presents the proposed architecture and vi-
sion for digital twins specifically tailored to the anal-
ysis of swarm systems. Several definitions of Digi-
tal Twins (DT) have been proposed (LaGrange, 2019;
Glaessgen and Stargel, 2012; Singh et al., 2021), with
most being predominantly domain-specific. Among
them, the definition provided by the AIF committee
stands out with its comprehensive approach, describ-
ing a DT as an organized set of digital models repre-
senting a real-world entity to address specific prob-
lems and use cases. While this definition is particu-
larly interesting, we believe it would be valuable to
incorporate the nature of the services rendered and
to clearly specify that the reality being represented is
not limited to the physical domain. Therefore, from
a service-oriented perspective, we define the digi-
tal twin as a virtual system that represents a reality
whether physical or not and connected to it through
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
282

a data flow; capable of delivering a range of ser-
vices, including simulation, debugging, formal verifi-
cation, monitoring, and system control, by leveraging
dynamic numerical models.
Regarding the composition of a digital twin, vari-
ous proposals are presented in the literature. We will
focus specifically on the proposal of (Kruger et al.,
2021), which the author presents in a hybrid service-
oriented approach where services can be hosted ei-
ther within the digital twin or in a Service-Oriented
Architecture (SOA). The services requiring data from
the physical system are provided by the digital twin,
while other services that need different types of data
are delivered through the SOA. This approach aligns
with our needs, as it allows for a level of functional
abstraction, which is one of the requirements outlined
in the previous section. According to the work of
(Human et al., 2023), which partially builds on the
research of (Kruger et al., 2021), the digital twin is
considered to consist of three layers: a model layer,
a services layer, and a data layer. Real-time bidirec-
tional communication is a crucial element in the life
cycle of digital twins, as presented in (Vaezi et al.,
2022). Therefore, we will also align with the work
(Chen et al., 2024) by integrating an interface layer.
This layer will define the interaction between the rep-
resented reality and the digital twin and between the
services provided by the DTs in the global architec-
ture.
Figure 2 illustrates the structure of DT and its
physical system (PS). Our digital twin structure incor-
porates a control data flow originating from the digi-
tal twin, unlike (Human et al., 2023) proposal, which
does not account for this level of sophistication in the
workflow of DT.
Figure 2: The structure of a digital twin and its physical
counterpart.
Based on the proposed DT structure above, we de-
fine the HSDT architecture with the purpose of en-
hancing the development and deployment of multiple
digital twins in hierarchical configuration for analyz-
ing swarm system. The requirements outlined in Sec-
tion 3 serve as foundation for the development of this
architecture. Two types of Digital Twins are intro-
duced in this architecture, forming its core: the In-
stance DT, which is directly connected to reality, and
the Aggregate DT, which is a composition of multi-
ple Digital Twins. Figure 3 presents the overview of
the hierarchical system of digital twins. In the follow-
ing subsections, we detail the key aspects introduced
by the architecture.
Figure 3: Holistic reference architecture of the hierarchical
system of digital twins.
4.1 HSDT Metamodel and
Interoperability
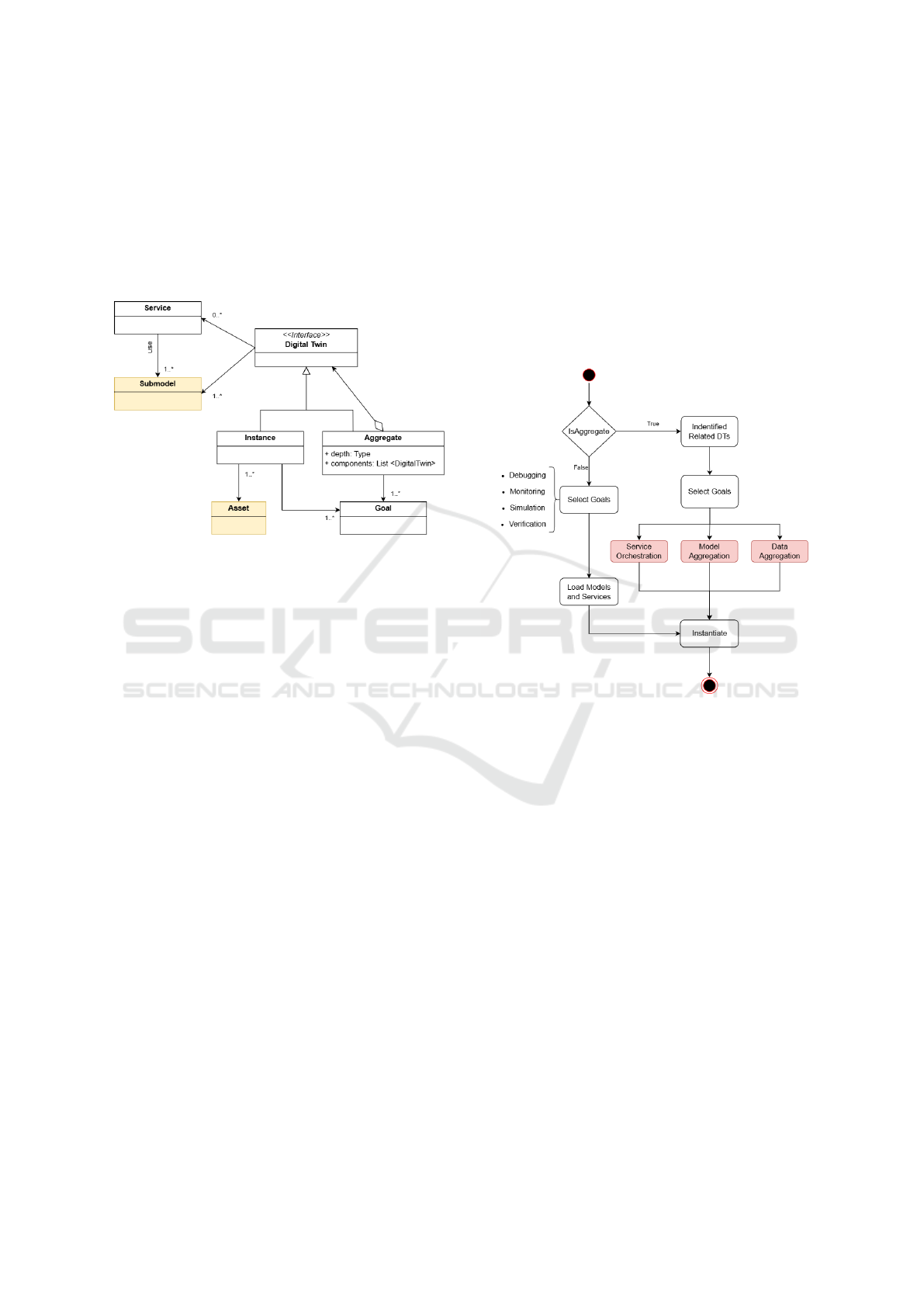
We define a metamodel (see Figure 4) based on the
Meta-Object Facility (MOF) standard. The meta-
model is designed to represent the domain structure
of the hierarchical digital twin (DT) system and to
ensure interoperability. The two defined types of DTs
are structured using a composite design pattern. Each
type of DT is associated with one or more goals, such
as monitoring, formal verification, simulation, or de-
bugging. However, the debugging and control capa-
bilities of a DT are specialized for the Instance DT, as
it is the only type of DT directly connected to reality.
Each DT includes embedded models utilized by var-
ious services. The Aggregate DT class, in contrast,
is not associated with an atomic Asset because it is
generated through the composition of DTs.
The notion of a goal is introduced to guide the ap-
propriate instantiation and level of sophistication of
DTs. Depending on the goal, certain elements of the
DTs may not be utilized. For example, for monitoring
purposes, only the data layer may be required, as no
computation is involved.
Interoperability within the HSDT architecture
refers to the ability of its entities to exchange data
(syntactic interoperability) and understand each other
(semantic interoperability). This property is critical,
as a DT may provide or depend on a service of-
fered by another DT, necessitating seamless data ex-
Hierarchical System of Digital Twins: A Holistic Architecture for Swarm System Analysis
283
change. The proposed metamodel supports interop-
erability not only within the architecture but also se-
mantic interoperability with the AAS (Asset Admin-
istration Shell) standard, a cornerstone of Industry
4.0. To align with the AAS standard, we incorporate
two key elements into the AAS data model (Bader and
Maleshkova, 2019): Asset and Submodel, as high-
lighted in yellow in Figure 4.
Figure 4: The metamodel of the Hierarchical System of
Digital Twin coupled with elements of AAS data model.
4.2 Instance/Aggregate DT
As previously explained, the Instance DT is directly
connected to reality and possesses specific capabili-
ties such as debugging and control of the represented
reality, in addition to analytical functions. However,
achieving higher-level analysis requires a DT operat-
ing at a level above the Instance DT. To address this
need, we introduced the Aggregate DT (ADT) and a
method for its instantiation. The ADT enhances the
HSDT by enabling analysis at various levels of sys-
tem granularity. This aggregation of Digital Twins is,
therefore, a key feature for the advanced analytical
capabilities within the HSDT architecture. (Redel-
inghuys et al., 2020) introduced the concept of Digital
Twin Aggregation (DTA) for combining digital twins,
but their approach relies exclusively on data from
other digital twins. In contrast, we believe that ag-
gregating digital twins should be driven by a defined
analysis goals, allowing for a more selective choice of
elements involved in the aggregation. Therefore, in
the goal-oriented method presented here, ADT is cre-
ated based on a specific analysis problem (e.g., visu-
alization, prediction, anomaly detection), which helps
determine the appropriate goal. This approach con-
siders both data and/or models, depending on the se-
lected goal. The interest in introducing model aggre-
gation lies in the ability to capture, beyond the data,
the paradigm of each digital twin composing the new
twin. The model’s aggregation could be achieved us-
ing model federation techniques, such as those pre-
sented in (Gu
´
erin, 2023) or for more formal model
by using composition operation such as parallel com-
position for automata. The goal-based aggregation
strategy enables the right choice of the sophistication
level of the new DT. For instance, if the aggregation
aims to provide an overview of a cluster’s metrics, it
is not necessary to include model aggregation; data
from low-level DTs alone is sufficient. The synopsis
in Figure 5 illustrates the steps for instantiating a Dig-
ital Twin, in the case of Instance DT and Aggregate
DT.
Figure 5: The workflow of DT instantiation based on the
goal-driven method.
4.3 Hierarchical Structure
Given the hierarchy of responsibilities within swarm
systems, the digital twin system must reflect this orga-
nization. Therefore, with HSDT, we present two types
of hierarchies: a functional hierarchy and an aggrega-
tion hierarchy.
Functional Hierarchy. The digital twins may differ
in the range or complexity of services they provide.
The functional hierarchy is based on the capabilities
of each digital twin. For example, in the HSDT, some
digital twins might have more specialized functions
or greater capabilities than others. So, in this hier-
archy, each digital twin’s level is determined by the
number of services it offers. Essentially, DTs offer-
ing more or critical services are considered higher in
the hierarchy, reflecting their greater functional role
within the swarm.
Aggregation Hierarchy. The aggregation hierarchy
is distinct and is specifically designed for Aggregate
DTs. This type of hierarchy considers the structural
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
284
relationships among digital twins that are composed
of multiple components. An important concept here
is aggregation depth, which corresponds to the level
within the hierarchy. Digital twins that are directly
connected to physical systems or real-world data have
an aggregation depth of 0. When these individual
twins are combined to form an aggregate DT, the ag-
gregation depth of the composite twin is defined as
one level higher than the maximum depth of its com-
ponents. This concept of aggregation depth provides a
standardized way to understand and organize complex
digital twins built from multiple layers of other twins.
Equation 1 defined the way to calculate the aggrega-
tion depth of an ADT composed of n instances of DT
and/or ADT. The process of ADT creation will be
explained in the following subsection. This method
enables the HSDT to organize and navigate complex
structures efficiently, helping to distinguish between
different levels of aggregation in the swarm system.
d
ADT
= max(d
1
, d
2
, . . . , d
n
) + 1 (1)
4.4 Synchronization: PS to DT and DT
to DT
The synchronization is essential to ensure that deci-
sions made based on the digital twin are reliable and
relevant. A failure in synchronization can lead to in-
consistencies, errors in data analysis, and inappropri-
ate actions. As highlighted by the authors in (Coviello
et al., 2020), who emphasize the importance of a syn-
chronization mechanism in a multi-sensor system, the
digital twin directly connected to a physical system
has similar requirements. Indeed, it can be fed by
various data sources from the different sensors of the
system entity it represents. Synchronization must oc-
cur in real-time, and for the twin to remain up-to-date,
the latency with the data generated by the physical
system must be low. In our context, where the com-
ponents of the swarm system are considered to be
equipped with sensors and the data is accessible, syn-
chronization involves establishing communication ca-
pable of transmitting this data with minimal latency.
Certain protocols enable fast and reliable message
handling between two application entities. The au-
thors (Uy and Nam, 2019) compare two widely used
protocols in the context of IoT and M2M communica-
tion: Message Queuing Telemetry Transport (MQTT)
and Advanced Message Queuing Protocol (AMQP).
The conclusions of their study show that AMQP is the
better choice when designing a link with a continuous
data stream. Therefore, in the architecture, we recom-
mend using the Advanced Message Queuing Proto-
col (AMQP). Implementing this protocol will ensure
a low-latency level in data exchanges.
In addition to synchronizing the digital twin with
the reality it represents, it is essential to ensure syn-
chronization between the digital twins, especially be-
tween the services provided by each DT. This is es-
sential to ensure effective and coordinated commu-
nication between the various services. To synchro-
nize these services, several solutions are available to
us, including the use of an orchestrator or an event-
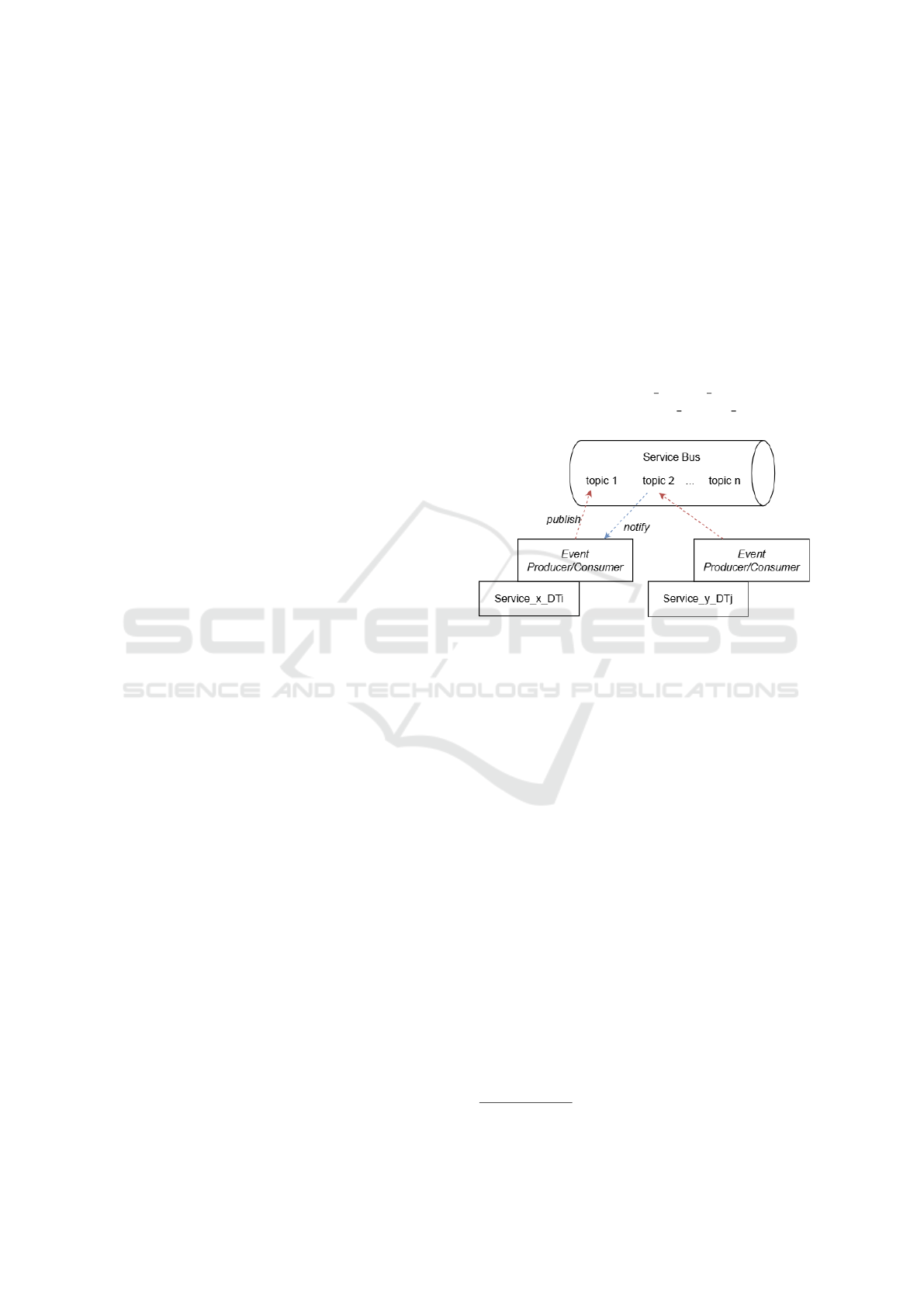
based coordination. In the HSDT architecture we use
an event-based synchronization. This later involves
services communicating through a service bus. Ser-
vices act as both event consumers and/or event pro-
ducers. Figure 6 illustrates the synchronization be-
tween DTs services; service y of DT j can publish an
event on Topic 2, while service x of DT i subscribes
to this event.
Figure 6: Service synchronization in HSDT, an Event-
Based approach.
5 HSDT PLATFORM PROTOTYPE
We propose to implement our architecture using
Pharo, a purely object-oriented programming lan-
guage and a powerful environment focused on sim-
plicity and immediate feedback. The HSDT platform
called DTwinSync will be deployed within instances
of the Pharo 12 Image. The platform offers all the
tools and APIs needed to develop and interact with
an HSDT architecture. This allows us to create dig-
ital twins, associate them with physical components.
This implementation offers several advantages, such
as ease of deployment, with all dependencies included
in the image, as well as re-usability. In this implemen-
tation, we will use multi-threading concepts to meet
real-time constraints. Specifically, communication-
related functions will be executed in separate threads.
The communication between the digital twin inside
the Pharo image and the physical system is done us-
ing the MQTT protocol (for seek of simplicity). The
development platform’s source code is available in a
public repository
1
.
1
https://github.com/Cracen26/DTwinSync-beta
Hierarchical System of Digital Twins: A Holistic Architecture for Swarm System Analysis
285

6 CASE STUDY: UVs TARGET
SEARCH
In this section, we present a simple case study to
demonstrate the ability of our approach to analyze in
different levels of granularity in a swarm of UVs. The
case study is as follows: marine UVs are deployed
over a body of water and organized into a swarm for-
mation, divided into two groups, the identifiers and
the actuators. The identifiers are equipped with de-
vices to detect a target in a specific location, while the
actuators are responsible for carrying out the neces-
sary action. The success of the mission depends on
the cooperation between the UVs from both groups,
with each fulfilling its designated tasks. The target
is located within the water body, and its position is
known. The DTs directly linked to the UVs will be
fed with data such as position and status. Due to dif-
ficulties in accessing physical infrastructure, we will
use a Python program to simulate the physical swarm.
The objective of the analysis in this case study is to
have an idea of the spatial distribution of our swarm
at a specific point in time.
Instance DT
The following code snippet shows the script in Pharo
that declare the instance DT and link them to their
physical counterparts. Once this instantiation is com-
plete, the data flow shared by the physical system will
be available in real time on the digital twin (DT).
1 dt := OrderedCollection new.
2 0 to: 3 do: [ :i |
3 dt add: (DTwin new start:
4 (PhysicalCounterpart new id: i))
].→
Aggregate DT
The goal now is to analyze a very simple parame-
ter: entropy, which can provide information about
the geographic distribution of our robots. These met-
rics cannot be calculated by the local digital twins of
the UVs, highlighting the need for high-level analy-
sis. Subsequently, we will instantiate different digital
twins and use aggregation to create ADT that will al-
low us to calculate the entropy of our group of marine
UVs.
1. Related DTs: The digital twins of the 4 UVs
2. Goals: Monitoring (Analyze the entropy)
3. Data Aggregation: Location attribute of each UV,
thus the data layer of the affiliated DTs
The following code snippet shows the syntax for in-
stantiating an ADT. The model that will be loaded
onto the ADT is EntropyModel. The principle of this
method is straightforward: it calculates entropy by di-
viding the area into cells and counting the number
of points in each cell. Next, it computes the prob-
abilities of having a point in each specific cell. Fi-
nally, the total entropy is calculated using the equa-
tion 2. To achieve this, after instantiating the ADT,
we loaded the EntropyModel, which calculates the
entropy, along with the EntropyVisualisation service,
which displays a plot of the entropy evolution. The
figure illustrates this evolution.
1 ADT := DTwinHL new.
2 ADT aggregationType
3 add: (AggType dataAggregation).
4 ADT aggregate: dt;
5 load: EntropyModel;
6 load: EntropyVisualisation.
H(X) = −
n
∑
i=1
p
i
log
b
(p
i
) (2)
In the following figure 7, after running the computa-
tion in the ADT, the model is executed, and the results
are passed to the visualizer, which then plots them.
The closer the entropy gets to zero, the more concen-
trated the points become. Thus, as the mission pro-
gresses, the expected behavior is observed: the UVs
move closer to the target point and become less dis-
persed.
Figure 7: Plot showing the Entropy of the UVs swarm
through ADT.
7 CONCLUSION
In this article, we present our vision to design a hi-
erarchical system of digital twins, aimed at analyz-
ing systems in a swarm configuration. After defining
the requirements we proposed a holistic architecture
that emphasizes organizing DTs within a hierarchical
configuration. This architecture is holistic because it
considers all levels of granularity within the swarm
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
286

and accounts for the relationships between them. We
introduce a new method called goal-driven to instan-
tiate DT. Furthermore, the proposed metamodel is
built upon the standard AAS, aiming to enhance the
openness of our architecture to Industry 4.0. Finally,
we present a simple case study to apply the theoreti-
cal concepts of HSDT, particularly by conducting an
analysis through the creation of an Aggregate DT.
However, this case study does not fully validate all
elements of the architecture and should be further de-
veloped to encompass all the aspects discussed in this
paper. Some areas require further development, such
as the reconfiguration loop between the digital twin
and the represented reality. Established engineering
approaches, like MAPE-K (Arcaini et al., 2015), can
be leveraged to design this connection.
REFERENCES
Arcaini, P., Riccobene, E., and Scandurra, P. (2015). Mod-
eling and analyzing mape-k feedback loops for self-
adaptation. In 2015 IEEE/ACM 10th International
Symposium on Software Engineering for Adaptive and
Self-Managing Systems, pages 13–23. IEEE.
Bader, S. R. and Maleshkova, M. (2019). The seman-
tic asset administration shell. In Semantic Systems.
The Power of AI and Knowledge Graphs: 15th Inter-
national Conference, SEMANTiCS 2019, Karlsruhe,
Germany, September 9–12, 2019, Proceedings 15,
pages 159–174. Springer.
Chen, Z., Surendraarcharyagie, K., Granland, K., Chen, C.,
Xu, X., Xiong, Y., Davies, C., and Tang, Y. (2024).
Service oriented digital twin for additive manufac-
turing process. Journal of Manufacturing Systems,
74:762–776.
Coviello, G., Avitabile, G., and Florio, A. (2020). The
importance of data synchronization in multiboard ac-
quisition systems. In 2020 IEEE 20th Mediter-
ranean Electrotechnical Conference (MELECON),
pages 293–297. IEEE.
Glaessgen, E. and Stargel, D. (2012). The digital twin
paradigm for future nasa and us air force vehi-
cles. In 53rd AIAA/ASME/ASCE/AHS/ASC structures,
structural dynamics and materials conference 20th
AIAA/ASME/AHS adaptive structures conference 14th
AIAA, page 1818.
Gu
´
erin, S. (2023). FML: un langage de f
´
ed
´
eration de
mod
`
eles pour l’interop
´
erabilit
´
e s
´
emantique de sources
d’information h
´
et
´
erog
`
enes. PhD thesis, ENSTA
Bretagne-
´
Ecole nationale sup
´
erieure de techniques
avanc
´
ees Bretagne.
Human, C., Basson, A., and Kruger, K. (2023). A design
framework for a system of digital twins and services.
Computers in Industry, 144:103796.
Kruger, K., Human, C., and Basson, A. (2021). Towards the
integration of digital twins and service-oriented archi-
tectures. In International Workshop on Service Ori-
entation in Holonic and Multi-Agent Manufacturing,
pages 131–143. Springer.
LaGrange, E. (2019). Developing a digital twin: The
roadmap for oil and gas optimization. In SPE
Offshore Europe Conference and Exhibition, page
D011S003R001. SPE.
Liu, Y. and Passino, K. M. (2000). Swarm intelligence: Lit-
erature overview. Department of electrical engineer-
ing, the Ohio State University.
Maier, M. W. (1998). Architecting principles for systems-
of-systems. Systems Engineering: The Journal of
the International Council on Systems Engineering,
1(4):267–284.
Michael, J., Pfeiffer, J., Rumpe, B., and Wortmann,
A. (2022). Integration challenges for digital twin
systems-of-systems. In Proceedings of the 10th
IEEE/ACM International Workshop on Software Engi-
neering for Systems-of-Systems and Software Ecosys-
tems, pages 9–12.
Moyne, J., Qamsane, Y., Balta, E. C., Kovalenko, I., Faris,
J., Barton, K., and Tilbury, D. M. (2020). A require-
ments driven digital twin framework: Specification
and opportunities. Ieee Access, 8:107781–107801.
Redelinghuys, A., Kruger, K., and Basson, A. (2020). A
six-layer architecture for digital twins with aggrega-
tion. In Service Oriented, Holonic and Multi-agent
Manufacturing Systems for Industry of the Future:
Proceedings of SOHOMA 2019 9, pages 171–182.
Springer.
Reiche, L.-T., Gundlach, C. S., Mewes, G. F., and Fay, A.
(2021). The digital twin of a system: A structure for
networks of digital twins. In 2021 26th IEEE interna-
tional conference on emerging technologies and fac-
tory automation (ETFA), pages 1–8. IEEE.
Singh, M., Fuenmayor, E., Hinchy, E. P., Qiao, Y., Murray,
N., and Devine, D. (2021). Digital twin: Origin to
future. Applied System Innovation, 4(2):36.
Uy, N. Q. and Nam, V. H. (2019). A comparison of amqp
and mqtt protocols for internet of things. In 2019
6th NAFOSTED Conference on Information and Com-
puter Science (NICS), pages 292–297. IEEE.
Vaezi, M., Noroozi, K., Todd, T. D., Zhao, D., Karakostas,
G., Wu, H., and Shen, X. (2022). Digital twins from a
networking perspective. IEEE Internet of Things Jour-
nal, 9(23):23525–23544.
Zhou, L., Leng, S., and Wang, Q. (2023a). A federated dig-
ital twin framework for uavs-based mobile scenarios.
IEEE Transactions on Mobile Computing.
Zhou, Y., Zhang, R., Liu, J., Huang, T., Tang, Q., and Yu,
F. R. (2023b). A hierarchical digital twin network for
satellite communication networks. IEEE Communica-
tions Magazine.
Hierarchical System of Digital Twins: A Holistic Architecture for Swarm System Analysis
287
