
Oil Spill Segmentation Using Deep Encoder-Decoder Models
Abhishek Ramanathapura Satyanarayana
a
and Maruf A. Dhali
b
Department of Artificial Intelligence, Bernoulli Institute, University of Groningen, 9747 AG Groningen, The Netherlands
Keywords:
Oil Spill, Semantic Segmentation, Neural Networks, Deep Learning.
Abstract:
Crude oil is an integral component of the world economy and transportation sectors. With the growing demand
for crude oil due to its widespread applications, accidental oil spills are unfortunate yet unavoidable. Even
though oil spills are difficult to clean up, the first and foremost challenge is to detect them. In this research, the
authors test the feasibility of deep encoder-decoder models that can be trained effectively to detect oil spills
remotely. The work examines and compares the results from several segmentation models on high dimensional
satellite Synthetic Aperture Radar (SAR) image data to pave the way for further in-depth research. Multiple
combinations of models are used to run the experiments. The best-performing model is the one with the
ResNet-50 encoder and DeepLabV3+ decoder. It achieves a mean Intersection over Union (IoU) of 64.868%
and an improved class IoU of 61.549% for the “oil spill” class when compared with the previous benchmark
model, which achieved a mean IoU of 65.05% and a class IoU of 53.38% for the “oil spill” class.
1 INTRODUCTION
Seas, oceans, and coastal regions represent vital com-
ponents of the environment, marine ecosystems, and
human activities. The aquatic ecosystem is a crucial
source of economic stability and livelihoods for a sig-
nificant portion of the global population. However,
numerous human activities pose substantial threats to
marine ecosystems, with oil spills being a notable
one. These spills can arise from various sources, in-
cluding the transportation of crude oil. Crude oil is
integral to many industrial and manufacturing pro-
cesses, finding application in sectors such as gasoline,
diesel, jet fuel, lubricants, textiles, paint, fertilizers,
pesticides, and pharmaceuticals, serving as a critical
driver of industrial development and expansion. How-
ever, the primary method of transporting crude oil
globally is through shipping tankers, which inevitably
leads to accidental oil spills. Apart from accidental
oil spills, other causes may include incidents from
offshore platforms, drilling rigs and wells, natural
disasters, deliberate releases, and technical failures.
These events can lead to catastrophic environmental
impacts, adverse human health effects, and signifi-
cant socio-economic consequences. Additionally, oil
spills can severely affect wildlife, including birds and
marine mammals, disrupting ecosystems and leading
a
https://orcid.org/0009-0003-1248-0988
b
https://orcid.org/0000-0002-7548-3858
to long-term ecological damage (Dunnet et al., 1982).
Besides affecting marine ecosystems, it also affects
the air quality (Middlebrook et al., 2010). Oil spills
have faced significant public and media backlash due
to their harmful effects, prompting political and gov-
ernmental institutions to prevent future occurrences
(Broekema, 2016). Oil spills may take a long time to
clean up, and the duration can vary significantly de-
pending on several factors, including the spill’s size,
the type of oil, environmental conditions, and the ef-
fectiveness of the response efforts (Shigenaka, 2009).
It is essential to automatically and efficiently detect
oil spills to enable prompt action for containment and
cleanup. One effective approach is to combine remote
sensing with artificial intelligence and supervised ma-
chine learning models specifically trained to identify
spills. Remote sensing can be accomplished through
satellite imagery for this purpose. Recently, there
has been a growing interest in using deep Convolu-
tional Neural Networks (CNNs) to process this im-
age data. The introduction of the AlexNet model has
demonstrated significant performance improvements
over traditional feature engineering techniques, par-
ticularly in the ImageNet object recognition compe-
tition. (Deng et al., 2009; Russakovsky et al., 2015;
Krizhevsky et al., 2012). Earlier works have utilized
CNN models to detect oil spills using Synthetic Aper-
ture Radar (SAR) satellite imagery. Marios Kresteni-
tis et al. applied some modifications and trained some
Satyanarayana, A. R. and Dhali, M. A.
Oil Spill Segmentation Using Deep Encoder-Decoder Models.
DOI: 10.5220/0013259600003905
In Proceedings of the 14th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2025), pages 741-748
ISBN: 978-989-758-730-6; ISSN: 2184-4313
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
741

of the CNN models to detect oil spills in their research
(Krestenitis et al., 2019). They divided the origi-
nal high-dimensional images into smaller patches and
trained various models on these. This process may
consume a significant amount of memory, necessi-
tating extensive computing resources and resulting
in increased energy usage. As technology advances,
developing and training models directly on higher-
dimensional images is essential to achieve better per-
formance. This can help reduce the memory required
for processing by a certain amount, reducing the en-
ergy required for computation. In this research, an
attempt is made to train various CNN models on rela-
tively higher dimensional images and study the effects
on the overall performance of the models.
2 RELATED WORKS
With the emergence of Artificial Neural Networks
(ANNs), Yann LeCun et al. proposed LeNet-5, the
first Convolutional Neural Network (CNN), that was
applied to the image digit recognition task (LeCun
et al., 1989; LeCun et al., 1998). Later, a popu-
lar dataset — the MNIST dataset became a bench-
mark for the digit recognition task in images (Deng,
2012). There was a significant gap in the applica-
tion of CNNs to various Computer Vision and Im-
age Analysis tasks for multiple reasons, with a lack
of computation power and a lack of large-scale la-
beled datasets being a few among them. Recently, Im-
ageNet has been hosting an object recognition chal-
lenge on a large-scale dataset (Deng et al., 2009;
Russakovsky et al., 2015). This dataset consists of
1.2 million images belonging to 1000 classes. In
2012, a CNN model named AlexNet won the Ima-
geNet object recognition challenge, outperforming all
the other participants of that year by a large margin
(Krizhevsky et al., 2012). The other participants used
non-CNN methods, i.e., the traditional handcrafted
features combined with different machine learning
techniques. One key challenge in computer vision is
semantic segmentation, where the model must learn
to classify each pixel in an image into a specific cate-
gory. In 2014, Jonathan Long et al. proposed a Fully
Convolutional Network (FCN), which was the first
CNN with only convolutional and transposed convo-
lutional layers and without any fully connected (or
dense) layers (Long et al., 2014). With the advent
of FCNs, researchers have proposed and developed
several other state-of-the-art models for the semantic
segmentation task. Among them, the popular ones
include — UNet, LinkNet, PSPNet, DeepLabV3+
(Ronneberger et al., 2015; Chaurasia and Culurciello,
2017; Zhao et al., 2016; Chen et al., 2018). These
models have one thing in common — i.e., they are
all variations of encoder-decoder architectures. Most
of these models have been benchmarked on large
datasets such as COCO and Cityscapes (Lin et al.,
2014; Cordts et al., 2016). Cityscapes, a labeled
dataset used as a benchmark for semantic segmenta-
tion tasks, contains 5000 high quality labeled images
and 20000 weakly labeled images. Marios Kresteni-
tis et al. benchmarked some of these models on
the Oil Spill Detection Dataset, a dataset developed
by compiling the images extracted from the satel-
lite Synthetic Aperture Radar (SAR) data (Kresteni-
tis et al., 2019). This dataset contains a meager
1002 training image, which is relatively much lower
than the Cityscapes dataset. In their research, Mar-
ios Krestenitis et al. trained the models by divid-
ing the original images of size 1250 × 650 into mul-
tiple patches. They used the image patches as in-
put for the models. They used different image patch
sizes for various models. Although different encoders
were used in the original implementations of these
models, Marios Krestenitis et al. modified the mod-
els to use ResNet-101 encoder for most of the de-
coders, the exception being MobileNetV2 encoder
with DeepLabV3+ decoder in their research (He et al.,
2015; Krestenitis et al., 2019; Chen et al., 2018; San-
dler et al., 2018). Their study found that the Mo-
bileNetV2 encoder coupled with the DeepLabV3+
decoder scored the highest mean Intersection over
Union (m-IoU) of 65.06%. They also found that this
model scored the second highest class IoU of 53.38%
for the oil spill class.
3 METHODOLOGY
3.1 Dataset
Marios Krestenitis et al. developed the Oil Spill
Detection Dataset, used in this research (Krestenitis
et al., 2019). The dataset consists of images extracted
from satellite Synthetic Aperture Radar (SAR) data
depicting oil spills and other relevant semantic classes
and their corresponding ground truth masks and labels
(Krestenitis et al., 2019). It has 1002 images in the
training set and 110 in the test set, with correspond-
ing labels. There are 5 semantic classes representing
the following types — sea surface, oil spill, oil spill
look-alike, ship, and land. Figure 1 shows the class
distribution in the training set. It can be observed that
the dataset is highly imbalanced concerning the var-
ious semantic classes. For example, the number of
pixels belonging to the “Sea Surface” class outnum-
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
742
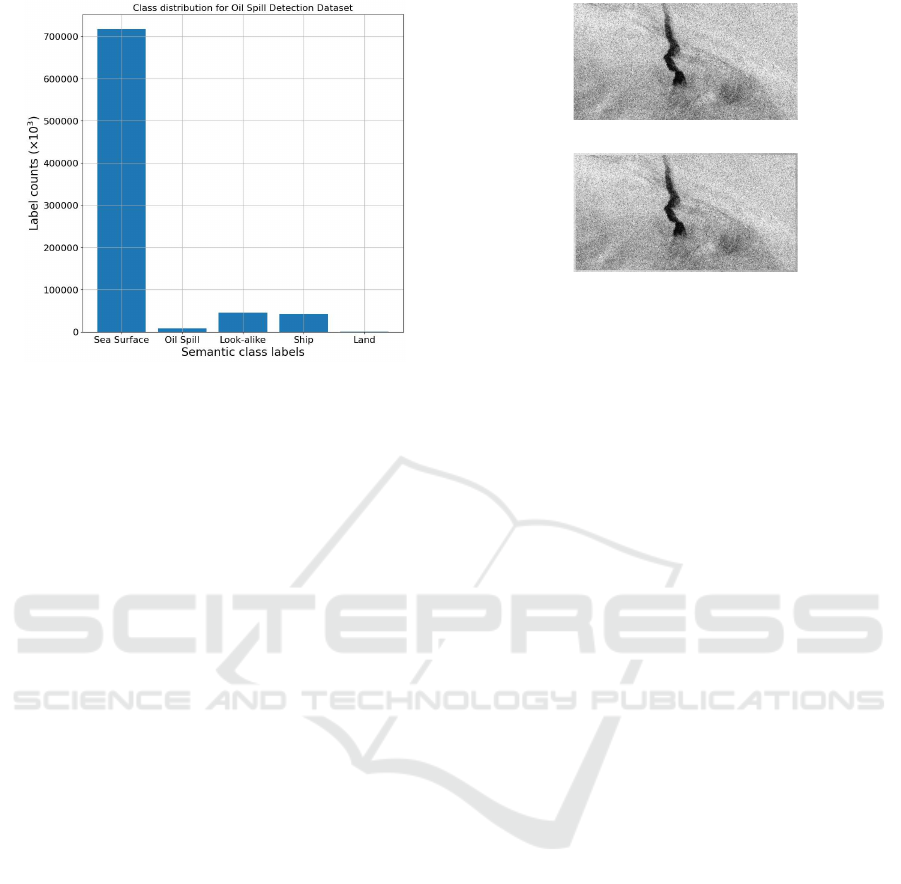
Figure 1: Plot showing the distribution of the semantic
classes in the Oil Spill Detection Dataset.
bers the other labeled semantic classes in the dataset.
The class of interest in this particular research is “Oil
Spill”, whose occurrence in the dataset is shallow. In
this research, we attempt to train models optimized
for detecting this class. The images in the dataset
are 1250 × 650 in W × H, where W and H represent
the width and height of the image, respectively. In
the work of this article, the training dataset (1002 im-
ages), provided by default, was further split randomly
into 95% (951 images) and 5% (51 images) for —
training and validation sets, respectively. This was
done to perform a 5-fold cross-validation with ran-
domized validation sets.
3.2 Image Preprocessing & Data
Augmentation
In their research, Marios Krestenitis et al. used
smaller image patches to train various models
(Krestenitis et al., 2019). The smallest and largest im-
age patch sizes used in their research were 320 × 320
and 336 × 336, respectively. In the work of this ar-
ticle, the original images, in 1250 × 650 dimensions,
are padded with patches on all the 4 sides of the image
to produce resulting images of 1280 × 672. An orig-
inal sample image from the training set and its corre-
sponding padded image are shown in Figures 2(a) and
2(b), respectively. So, higher resolution images are
used as input to the models, compared to those used
by Marios Krestenitis et al. (Krestenitis et al., 2019).
The patch padding is done in such a way as to select
a patch of pixels with the sea surface. A random sam-
ple image from the training set is selected to make
this patching task more straightforward. Data aug-
mentation is applied to increase the size of the train-
(a)
(b)
Figure 2: (a) Example of an original image from the training
set. (b) A sample padded image from the training set.
ing dataset. Random horizontal and vertical flips are
applied only on the training set for data augmentation.
The images are normalized using the mean and stan-
dard deviation of the training set. Then, the normal-
ized images are used as input for the various models
used in this research.
3.3 Models
3.3.1 Residual Networks
Increasing the depth of the convolutional neural net-
works (CNNs) beyond a certain point adversely af-
fected the model’s accuracy due to the vanishing and
exploding gradient problems. To solve this, Residual
Network (ResNet) (He et al., 2015) was introduced
by Kaiming He et al. The ResNet consists of resid-
ual blocks that can learn identity mappings in case of
deeper networks where gradients can vanish. When
stacked, these residual blocks help mitigate the van-
ishing gradient problem by learning an identity func-
tion. Let us consider input x, and the desired mapping
from input to output is denoted by H(x). The residual
denoted by F(x) between the output H(x) and input x
can be computed using the equation (1)
F(x) = H(x) − x (1)
Hence, instead of using the original mapping, it can
be recast into residual mapping using the equation (2)
H(x) = F(x) + x (2)
To perform the above mapping, a constraint is that
F(x) and x should be of the exact dimensions. But
if that is not the case, then one can use a projection
vector W
s
to match the dimensions. This is shown in
equation (3).
y = F(x, {W
i
}) +W
s
x (3)
Oil Spill Segmentation Using Deep Encoder-Decoder Models
743

Kaiming He et al. (He et al., 2015) showed that it was
easier to learn the residual mapping than the original
mapping. In this article, various pre-trained variants
of ResNet models — ResNet-18, ResNet-34, ResNet-
50, and ResNet-101 encoders are used, i.e., without
the final classification layer that was used for ob-
ject recognition on the ImageNet dataset (Deng et al.,
2009; Russakovsky et al., 2015; He et al., 2015).
3.3.2 EfficientNet
Neural Architecture Search (NAS) was proposed to
optimize network architecture for image classifica-
tion by Zoph et al. (Zoph et al., 2017). The train-
ing bottlenecks of EfficientNet were addressed, and
EfficientNetV2 was proposed by Mingxing Tan et al.
(Tan et al., 2019; Tan and Le, 2021). The main
change was replacing the MBConv block of Efficient-
Net with a new block proposed by Mingxing Tan et
al., the FusedMBConv block, in the early layers. In
the MBConv block, a 3 × 3 depthwise convolution
layer was followed by a 1 × 1 normal convolution
layer. This was replaced in the FusedMBConv block
with a single fused 3 × 3 convolution layer. The other
changes in EfficientNetV2 were to use 3 × 3 kernel
sizes instead of larger kernel sizes but with more lay-
ers and a smaller expansion ratio for MBConv blocks
since smaller expansion ratios and removal of the last
stride-1 stage, which were optimizations towards a re-
duction of the memory access overhead (Tan and Le,
2021).
3.3.3 DeepLabV3 & DeepLabV3+
The output of the encoder was provided as the input
to the decoder, i.e., one of the decoders considered in
this research — DeepLabV3 and DeepLabV3+. In the
DeepLabV3 decoder, Atrous Spatial Pyramid Pool-
ing (ASPP) block was used (Chen et al., 2017; Chen
et al., 2016). This was a modification of earlier ver-
sions of the DeepLab decoder where atrous convo-
lution layers were used instead of standard convolu-
tion layers. A dilation rate is used in atrous or di-
lated convolution, which uses a larger view of pix-
els when the kernel is applied to the image. In this
ASPP block, there were four atrous convolution lay-
ers. ASPP has an average pooling layer applied on
the feature maps from the encoder block to provide
global context information. The outputs of all these
five layers of the ASPP block were concatenated, and
bilinear upsampling was applied to produce feature
maps with the exact dimensions of the input image
dimensions. There were some minor changes to the
DeepLabV3+ decoder when compared with that of
DeepLabV2 (Chen et al., 2017; Chen et al., 2018).
The outputs of all five layers of the ASPP block were
concatenated, and bilinear upsampling by a factor of
4 was applied. To the corresponding features from
the encoder block, a 1 × 1 convolution was used to
balance the importance between the backbone’s low-
level features and the encoder block’s compressed se-
mantic features. The resulting features were concate-
nated with upsampled features followed by 3 convo-
lution layers to refine the concatenated features. This
connection from the encoder block and concatenation
was a minor change in the DeepLabV3+ decoder. The
resulting feature maps were upsampled using bilinear
upsampling to produce feature maps with the exact
dimensions of the input image dimensions.
3.4 Training Models
The following encoders are used in this research —
ResNet-18, ResNet-34, ResNet-50, ResNet-101, Effi-
cientNetV2S, and EfficientNetV2M (He et al., 2015;
Tan and Le, 2021). The pre-trained models trained on
the ImageNet dataset are used for the encoder mod-
els using transfer learning (Bengio, 2012; Deng et al.,
2009; Russakovsky et al., 2015). The following de-
coders are used in this research — DeepLabV3 and
DeepLabV3+ (Chen et al., 2017; Chen et al., 2018).
All the encoder-decoder models are trained end to end
for 100 epochs, and the hyperparameters are obtained
empirically. Mean categorical cross-entropy loss is
used since the dataset contained 5 semantic classes.
The categorical cross-entropy is given by Euqation 4
where c
i
denotes the encoded class and p
i
denotes the
probability of the class as predicted by the model for
every one of the n classes in the dataset. The Stochas-
tic Gradient Descent (SGD) optimizer is used with an
initial learning rate of 1 × 10
−2
, a momentum of 0.9,
and a weight decay of 1 × 10
−4
. Liang-Chieh Chen
et al. observed that the performance of the segmen-
tation model was higher when SGD was combined
with the Polynomial learning rate scheduler (Chen
et al., 2016). In this research, the SGD optimizer
is combined with a polynomial learning rate sched-
uler, where the learning rate decays in a polynomial
fashion. The Polynomial learning rate scheduler is
given by 5 where lr
0
is the initial learning rate, e is
the current epoch, T
e
is the total number of epochs,
and power controls the learning rate decay. Learning
may be hampered once the learning rate at any epoch
goes below a certain threshold and becomes closer to
zero. To avoid this, a minimum learning rate is used
as a threshold, and if the learning rate goes below the
threshold, the threshold learning rate is used. For the
Polynomial learning rate scheduler, the parameters —
lr
0
is set to 1 ×10
−2
, power is set to 0.9 and the min-
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
744

Table 1: Batch sizes of different models used for training.
Encoder Decoder #Params Batch
(millions) size
ResNet-18 DeepLabV3+ 12.34 32
ResNet-34 DeepLabV3+ 22.45 24
ResNet-50 DeepLabV3+ 25.07 8
ResNet-101 DeepLabV3+ 44.06 8
EfficientNetV2S DeepLabV3 21.42 8
EfficientNetV2M DeepLabV3 54.11 4
imum learning rate is set to 1 × 10
−6
.
CE(c, p) = −
n
∑
i=1
c
i
log(p
i
) (4)
lr = lr
0
× (1 −
e
T
e
)
power
(5)
A weight decay is used for regularization in the SGD
optimizer, a dropout layer with a dropout rate of 10%,
and data augmentation with horizontal and vertical
flips is used. Different batch sizes are used to train
different models as they differ in the number of pa-
rameters that require different amounts of Graphical
Processing Unit (GPU) memory. Table 1 shows the
batch size used to train different models. The Nvidia
V100 GPU available on the high-performance com-
puting cluster is used to train the models.
3.5 Transfer Learning
Transfer learning is a machine learning approach that
simplifies the training of deep neural networks from
scratch (Bengio, 2012). Transfer learning allows us
to use a previously developed machine learning model
for a new but related task. This approach has gained
significant popularity in the field of computer vision,
primarily due to the impressive capability of CNNs to
adapt learned low-level feature extraction for various
tasks.
3.6 Evaluation Metrics
For evaluation of the performance of the models, In-
tersection over Union (IoU) is used (Krestenitis et al.,
2019). The mean IoU (m-IoU) is the mean of the IoU
of the different semantic classes in the dataset. The
class IoU is the IoU computed for a semantic class
individually.
4 RESULTS & DISCUSSION
4.1 Quantitative Analysis
A 5-fold cross-validation was performed to find the
deviation of the performance of the models on differ-
Table 2: Performance metrics of various models for a 5-fold
validation on the randomized validation sets.
Encoder Decoder m-IoU (%)
ResNet-18 DeepLabV3+ 67.345 ± 1.407
ResNet-34 DeepLabV3+ 67.522 ± 3.898
ResNet-50 DeepLabV3+ 67.578 ± 3.631
ResNet-101 DeepLabV3+ 68.152 ± 2.470
EfficientNetV2S DeepLabV3 60.668 ± 2.796
EfficientNetV2M DeepLabV3 58.997± 3.021
ent random validation splits. Table 2 shows the per-
formance metrics of the various models for a 5-fold
validation on the randomized validation sets. For all
the models, there is a significant deviation of m-IoU
(greater than 1%) across the 5-fold validation. This is
expected since the dataset was highly imbalanced and
was split randomly into training and validation sets.
Some splits would have higher m-IoU than others, de-
pending on the division of the samples and their dis-
tribution of semantic classes. Hence, the m-IoU of the
validation set depends on the split in cross-validation
experiments.
Table 3 shows the performance metrics of the best-
performing model for each of the models on the test
set with 110 images. The best m-IoU on the test set
was 64.868% for the model with the ResNet-50 en-
coder and DeepLabV3+ decoder. This model’s per-
formance is slightly lower than the best-performing
model from the previous research by Mario Kresteni-
tis et al., which scored m-IoU of 65.06% on the test
set (Krestenitis et al., 2019). Table 1 also shows the
number of parameters in various models. If the model
with EfficientNetV2M encoder and DeepLabV3 de-
coder with 54.11 million parameters and the model
with ResNet-50 encoder and DeepLabV3+ decoder
with just 25.07 million parameters are considered,
their performances are 55.504% and 64.868% respec-
tively. This shows that increasing the number of pa-
rameters in a model would not necessarily improve
the model’s performance for every task.
Table 3: Performance metrics of the best-performing model
for each model on the test set with 110 images.
Encoder Decoder m-IoU (%)
ResNet-18 DeepLabV3+ 59.647
ResNet-34 DeepLabV3+ 60.843
ResNet-50 DeepLabV3+ 64.868
ResNet-101 DeepLabV3+ 64.677
EfficientNetV2S DeepLabV3 55.492
EfficientNetV2M DeepLabV3 55.504
Table 4 shows the classwise performance metrics
of the best-performing models on the test set with 110
Oil Spill Segmentation Using Deep Encoder-Decoder Models
745
images, i.e., the model with ResNet-50 encoder and
DeepLabV3+ decoder from this research and best-
performing model from Marios Krestenitis et al. re-
search. Marios et al. best model scored a class IoU of
53.38% and 55.40% for the “oil spill” and “oil spill
look-alike” classes, respectively (Krestenitis et al.,
2019). On the other hand, the best-performing model
from this research scored a class IoU of 61.549%
and 40.773% for the “oil spill” and “oil spill look-
alike” classes, respectively. Although the model from
this research scored lower for the “oil spill look-
alike” class, it still scored higher for the “oil spill”
class, which is of more interest. Another observa-
tion is that the performance of detection of “ship”
is more remarkable for the best-performing model
from this research when compared with that of the
best-performing model from Marios Krestenitis et al.,
with class IoU of 33.378% and 27.63% respectively.
For the remaining classes, i.e., the “sea surface” and
“land”, the performances of the best-performing mod-
els from this research and Marios Krestenitis et al. are
comparable.
Table 4: Classwise performance metrics, i.e., the class IoU
of the best-performing model on the test set with 110 im-
ages.
Class IoU (%)
Our best Best model of
model Marios et al.
Semantic Class
Sea surface 96.422 96.43
Oil spill 61.549 53.38
Oil spill look-alike 40.773 55.40
Ship 33.378 27.63
Land 92.218 92.44
mean 64.868 65.06
4.2 Qualitative Analysis
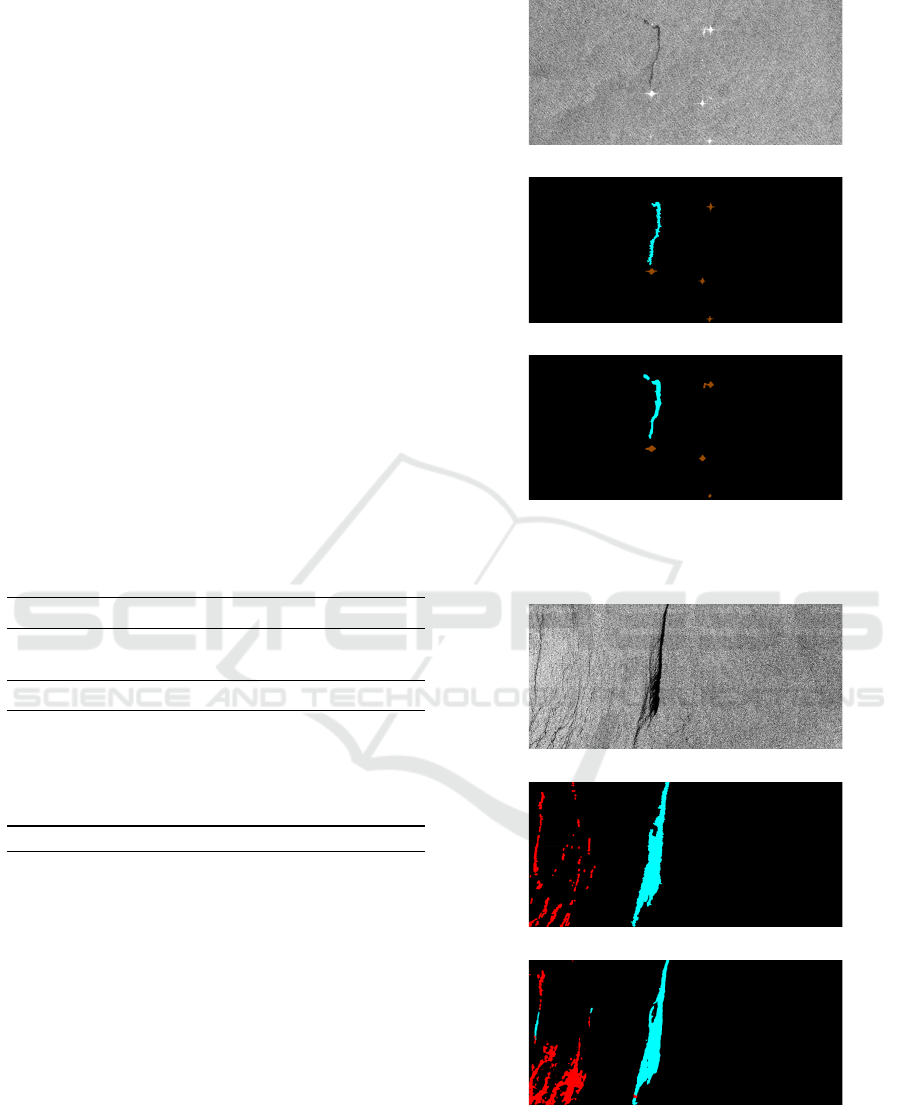
From the test sample shown in Figure 3(a), its ground-
truth mask shown in Figure 3(b) and its prediction
mask shown in Figure 3(c), it can be observed that
relatively smaller areas of “oil spills” (in Cyan) along
with “ships” (in Brown) are detected by the model
with reasonable accuracy, for this sample. From Fig-
ures 4(a), 4(b), and 4(c), it can be observed that rel-
atively more significant areas of “oil spills” are de-
tected by the model with reasonable accuracy. In this
test sample, the model confuses the classes ”oil spill”
and ”oil spill look-alike,” resulting in portions of the
regions being predicted for both classes. However,
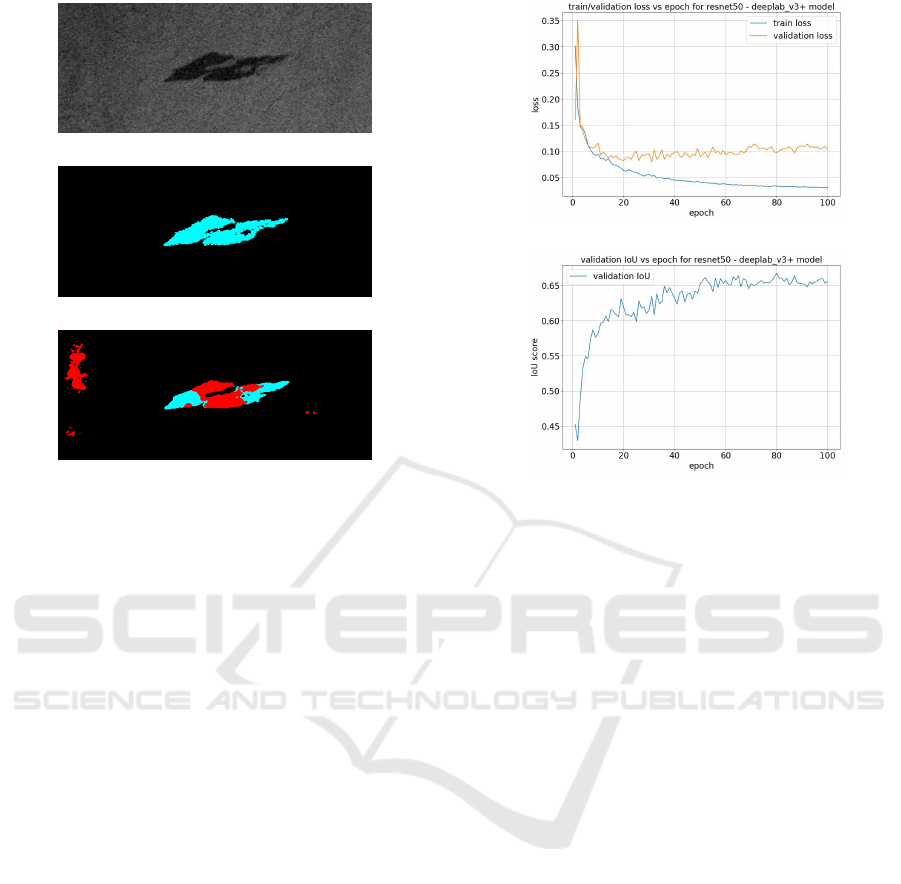
from Figures 5(a), 5(b), and 5(c), it can be observed
that relatively more significant areas of “oil spills” are
(a)
(b)
(c)
Figure 3: (a) Sample test image (b) Groundtruth (c) Pre-
dicted mask.
(a)
(b)
(c)
Figure 4: (a) Sample test image (b) Groundtruth (c) Pre-
dicted mask.
not detected by the model with reasonable accuracy.
The model showcases a range of detections, including
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
746
(a)
(b)
(c)
Figure 5: (a) Sample test image (b) Groundtruth (c) Pre-
dicted mask.
highly accurate results as well as some less reliable
ones.
4.3 Learning Curves
Figure 6(a) shows the plot of losses for training
and validation sets vs. epoch for the model with
ResNet-50 encoder and DeepLabV3+ decoder, i.e.,
for the best-performing models from our experiments.
6(b) shows the plot of m-IoU for validation set vs.
epoch for the model with ResNet-50 encoder and
DeepLabV3+ decoder. The two learning curve fig-
ures show that the validation metrics converge, i.e.,
they do not deviate much after considerable learning.
However, some overfitting occurs as the gap between
the training and validation losses widens with an in-
crease in the number of epochs.
5 CONCLUSIONS
In the earlier research on the same topic and dataset,
high-dimensional images were divided into smaller
patches that served as input for the models. The best-
performing model achieved a mean Intersection over
Union (m-IoU) of 65.06% and a class IoU of 53.38%.
In contrast, this article utilized high-dimensional im-
ages as direct input to the model without partition-
ing them into patches. The best-performing model
in this study, which employed a ResNet-50 encoder
(a)
(b)
Figure 6: (a) Plot of training and validation losses for the
model with ResNet-50 encoder and DeepLabV3+ decoder.
(b) Plot of validation m-IoU for the model with ResNet-50
encoder and DeepLabV3+ decoder.
and a DeepLabV3+ decoder, achieved an m-IoU of
64.868% and a class IoU of 61.549% for the ”oil
spill” class. This represents a new benchmark result,
indicating that using high-dimensional images can en-
hance the performance of ”oil spill” detection. How-
ever, the dataset also contains samples from the ”oil
spill look-alike” class, which can create confusion for
the trained models, making it challenging to distin-
guish between the ”oil spill” and ”oil spill look-alike”
classes. There is potential for further experimentation
with various encoders and decoders to achieve bet-
ter results. Additionally, the current encoders and de-
coders used in this research could be improved by in-
corporating visual self-attention modules. These en-
hancements can be explored in future research follow-
ing the analysis presented in this article.
ACKNOWLEDGEMENTS
We thank the Center for Information Technology of
the University of Groningen for their support and for
providing access to the Peregrine high-performance
computing cluster. We also thank Marios Krestenitis
and Konstantinos Ioannidis for creating and providing
the dataset.
Oil Spill Segmentation Using Deep Encoder-Decoder Models
747

REFERENCES
Bengio, Y. (2012). Deep learning of representations for
unsupervised and transfer learning. In Guyon, I.,
Dror, G., Lemaire, V., Taylor, G., and Silver, D., edi-
tors, Proceedings of ICML Workshop on Unsupervised
and Transfer Learning, volume 27 of Proceedings of
Machine Learning Research, pages 17–36, Bellevue,
Washington, USA. PMLR.
Broekema, W. (2016). Crisis-induced learning and issue
politicization in the eu: The braer, sea empress, erika,
and prestige oil spill disasters. Public Administration,
94(2):381–398.
Chaurasia, A. and Culurciello, E. (2017). Linknet: Exploit-
ing encoder representations for efficient semantic seg-
mentation. CoRR, abs/1707.03718.
Chen, L., Papandreou, G., Kokkinos, I., Murphy, K.,
and Yuille, A. L. (2016). Deeplab: Semantic
image segmentation with deep convolutional nets,
atrous convolution, and fully connected crfs. CoRR,
abs/1606.00915.
Chen, L., Papandreou, G., Schroff, F., and Adam, H.
(2017). Rethinking atrous convolution for semantic
image segmentation. CoRR, abs/1706.05587.
Chen, L., Zhu, Y., Papandreou, G., Schroff, F., and Adam,
H. (2018). Encoder-decoder with atrous separable
convolution for semantic image segmentation. CoRR,
abs/1802.02611.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In Proc. of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). ImageNet: A Large-Scale Hierarchical
Image Database. In CVPR09.
Deng, L. (2012). The mnist database of handwritten digit
images for machine learning research [best of the
web]. IEEE Signal Processing Magazine, 29(6):141–
142.
Dunnet, G. M., Crisp, D. J., Conan, G., Bournaud, R.,
Cole, H. A., and Clark, R. (1982). Oil pollution and
seabird populations. Philosophical Transactions of
the Royal Society of London. B, Biological Sciences,
297(1087):413–427.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep
residual learning for image recognition. CoRR,
abs/1512.03385.
Krestenitis, M., Orfanidis, G. A., Ioannidis, K., Avgeri-
nakis, K., Vrochidis, S., and Kompatsiaris, Y. (2019).
Oil spill identification from satellite images using
deep neural networks. Remote. Sens., 11:1762.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Pereira, F., Burges, C., Bottou, L.,
and Weinberger, K., editors, Advances in Neural In-
formation Processing Systems, volume 25. Curran As-
sociates, Inc.
LeCun, Y., Boser, B., Denker, J. S., Henderson, D., Howard,
R. E., Hubbard, W., and Jackel, L. D. (1989). Back-
propagation applied to handwritten zip code recogni-
tion. Neural Computation, 1(4):541–551.
LeCun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Lin, T., Maire, M., Belongie, S. J., Bourdev, L. D., Girshick,
R. B., Hays, J., Perona, P., Ramanan, D., Doll
´
ar, P.,
and Zitnick, C. L. (2014). Microsoft COCO: common
objects in context. CoRR, abs/1405.0312.
Long, J., Shelhamer, E., and Darrell, T. (2014). Fully
convolutional networks for semantic segmentation.
CoRR, abs/1411.4038.
Middlebrook, A., Ahmadov, R., Atlas, E., Bahreini, R.,
Blake, D., Brioude, J., Brock, C., de Gouw, J., Fahey,
D., Fehsenfeld, F., Holloway, J., Lueb, R., McKeen,
S., Meagher, J., Meinardi, S., Murphy, D., Parrish, D.,
Peischl, J., and Watts, L. (2010). Air quality impact
of the deepwater horizon oil spill (invited). AGU Fall
Meeting Abstracts, pages 02–.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. CoRR, abs/1505.04597.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., and Fei-Fei, L. (2015).
ImageNet Large Scale Visual Recognition Challenge.
International Journal of Computer Vision (IJCV),
115(3):211–252.
Sandler, M., Howard, A. G., Zhu, M., Zhmoginov, A., and
Chen, L. (2018). Inverted residuals and linear bottle-
necks: Mobile networks for classification, detection
and segmentation. CoRR, abs/1801.04381.
Shigenaka, G. (2009). Hindsight and foresight: 20 years
after the exxon valdez spill. USA: National Oceanic
and Atmospheric Administration, page 18.
Tan, M. and Le, Q. V. (2021). Efficientnetv2: Smaller mod-
els and faster training. CoRR, abs/2104.00298.
Tan, M., Pang, R., and Le, Q. V. (2019). Efficient-
det: Scalable and efficient object detection. CoRR,
abs/1911.09070.
Zhao, H., Shi, J., Qi, X., Wang, X., and Jia, J. (2016). Pyra-
mid scene parsing network. CoRR, abs/1612.01105.
Zoph, B., Vasudevan, V., Shlens, J., and Le, Q. V. (2017).
Learning transferable architectures for scalable image
recognition. CoRR, abs/1707.07012.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
748
