
PIMAEX: Multi-Agent Exploration Through Peer Incentivization
Michael K
¨
olle, Johannes Tochtermann, Julian Sch
¨
onberger, Gerhard Stenzel, Philipp Altmann and
Claudia Linnhoff-Popien
Institute of Informatics, LMU Munich, Munich, Germany
fi
Keywords:
Multi-Agent Reinforcement Learning, Intrinsic Curiosity, Social Influence.
Abstract:
While exploration in single-agent reinforcement learning has been studied extensively in recent years, consid-
erably less work has focused on its counterpart in multi-agent reinforcement learning. To address this issue,
this work proposes a peer-incentivized reward function inspired by previous research on intrinsic curiosity and
influence-based rewards. The PIMAEX reward, short for Peer-Incentivized Multi-Agent Exploration, aims to
improve exploration in the multi-agent setting by encouraging agents to exert influence over each other to
increase the likelihood of encountering novel states. We evaluate the PIMAEX reward in conjunction with
PIMAEX-Communication, a multi-agent training algorithm that employs a communication channel for agents
to influence one another. The evaluation is conducted in the Consume/Explore environment, a partially observ-
able environment with deceptive rewards, specifically designed to challenge the exploration vs. exploitation
dilemma and the credit-assignment problem. The results empirically demonstrate that agents using the PI-
MAEX reward with PIMAEX-Communication outperform those that do not.
1 INTRODUCTION
One of the main challenges in Reinforcement Learn-
ing (RL) is the exploration vs. exploitation dilemma;
that is, an RL agent must find a suitable trade-off be-
tween exploratory and exploitative behavior to avoid
getting stuck in local optima. This is especially im-
portant for hard exploration problems, which often
exhibit sparse or deceptive rewards; that is, rewards
may occur rarely or be misleading. This issue is
also related to another important problem in RL, the
credit-assignment problem: if a long sequence of ac-
tions without any direct reward must be taken to even-
tually obtain a reward, RL agents might fail to assign
credit to those non-rewarding actions that are tempo-
rally distant from the eventual reward.
In such problems, naive approaches based purely
on random exploration, such as ε-greedy policies, of-
ten fail to learn successful policies. Consequently,
many approaches have been proposed to tackle these
challenges. While much work in single-agent RL has
focused on intrinsic curiosity rewards and novelty of
encountered states to aid exploration, there is consid-
erably less literature aimed specifically at multi-agent
exploration. This is likely because the state space
of multi-agent RL (MARL) systems grows exponen-
tially with the number of agents, making exploration
in this setting a much harder problem than in single-
agent RL.
Inspired by previous work in intrinsic curiosity
and influence-based rewards, this work proposes a
peer-incentivization scheme, in which an agent re-
wards its peers for influencing it to discover novel
states. Accordingly, the main contribution of this
work is the formulation of a multi-agent social in-
fluence peer reward function, the PIMAEX reward,
aimed at improving exploration in multi-agent set-
tings with sparse or deceptive rewards. Additionally,
a multi-agent Reinforcement Learning algorithm em-
ploying this reward, PIMAEX-Communication, is in-
troduced. The PIMAEX reward is a specific instance
of a generalized multi-agent social influence peer re-
ward function, also introduced in this work, com-
prising three terms α, β, and γ. The α term is es-
sentially the influence reward introduced by (Jaques
et al., 2018), while the γ term is comparable to that
in (Wang et al., 2019) and was part of the proposed
future work in (Jaques et al., 2018). Therefore, the
contribution lies in the β term, which, to the best of
the author’s knowledge, has not yet been proposed, as
well as in the generalized formulation combining all
three terms in a weighted sum.
To evaluate PIMAEX-Communication, this work
uses the Consume/Explore environment, a partially
572
Kölle, M., Tochtermann, J., Schönberger, J., Stenzel, G., Altmann, P. and Linnhoff-Popien, C.
PIMAEX: Multi-Agent Exploration Through Peer Incentivization.
DOI: 10.5220/0013260000003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 572-579
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

observable multi-agent environment with deceptive
rewards, designed specifically to address the ex-
ploration vs. exploitation dilemma and the credit-
assignment problem.
Section 2 reviews research on intrinsic curiosity,
influence-based rewards, and multi-agent exploration.
Section 3 introduces the PIMAEX reward and algo-
rithm. Section 5 outlines the experimental setup. Sec-
tion 6 compares results with baselines. Section 7 sum-
marizes contributions and future work.
2 RELATED WORK
The PIMAEX reward function is inspired by two main
areas in reinforcement learning: intrinsic curiosity re-
wards, which encourage exploration, and influence-
based rewards, where agents receive rewards based
on the impact of their actions on peers. This section
explores these areas, with intrinsic curiosity rewards
in Section 2.1 and influence-based rewards in Sec-
tion 2.3. Influence-based rewards naturally apply to
multi-agent reinforcement learning, where they assist
with coordination and cooperation. An overview of
the related cooperative MARL approaches is given in
Section 2.2, focusing on methods most relevant to the
mechanisms proposed in this work.
2.1 Intrinsic Motivation: Curiosity
Intrinsic curiosity rewards are widely used to drive
exploration, particularly in challenging environments.
These rewards supplement or sometimes replace the
environment’s reward by incentivizing agents to seek
novelty. Two common methods are count-based ex-
ploration and prediction-error exploration. Count-
based methods compute novelty by counting state vis-
its, e.g., by giving a reward proportional to
1
√
N(s)
.
However, this approach is feasible only in small state
spaces and relies on approximations, such as density
models or hash functions, in larger spaces (Bellemare
et al., 2016; Ostrovski et al., 2017; Tang et al., 2016).
Prediction-error methods, introduced by Schmid-
huber (Schmidhuber, 1991), reward agents based on
the error of a learned model predicting future states.
High prediction errors signify novel states, making
this method effective for exploration. Variants of
this approach use forward dynamics models to pre-
dict next states (Oudeyer et al., 2007; Stadie et al.,
2015) or inverse dynamics models to avoid uncontrol-
lable environmental factors (Pathak et al., 2017). To
overcome issues like the ”noisy TV problem” (Burda
et al., 2018), where agents get attracted to random,
high-error stimuli, Burda et al. propose Random Net-
work Distillation (RND) (Burda et al., 2018). In
RND, a randomly initialized neural network serves as
the target for a second network to predict, with pre-
diction errors used as curiosity rewards. This method
is computationally light, but requires observation and
reward normalization to avoid inconsistencies (Burda
et al., 2018).
2.2 Multi-Agent Cooperation and
Coordination
Influence-based rewards are part of broader MARL
approaches that promote agent cooperation. Many
methods leverage centralized training and decentral-
ized execution (CTDE), sharing Q-networks across
agents and decomposing centralized Q-functions (Fu
et al., 2022; Foerster et al., 2017; Rashid et al., 2018).
Communication between agents is also common for
improved coordination (Peng et al., 2017; Sukhbaatar
et al., 2016). Another approach involves counterfac-
tual reasoning to determine individual agent contribu-
tions in the absence of explicit individual rewards, as
in (Foerster et al., 2017). Peer incentivization, where
agents can reward or penalize others, is a relevant di-
rection (Yang et al., 2020; Schmid et al., 2021).
2.3 Social Influence
In settings where agents maximize their own rewards,
social influence can encourage collaboration without
a central reward. Jaques et al. (Jaques et al., 2018)
propose rewarding agents based on the influence they
exert on other agents’ policies, measured via coun-
terfactual reasoning. They evaluate influence by con-
ditioning one agent’s policy on another’s actions and
comparing it with a counterfactual scenario where the
influence is removed. This discrepancy quantifies in-
fluence and encourages coordination by maximizing
mutual information.
In Jaques et al.’s experiments, agents either influ-
ence others through discrete message communication
or use models to predict others’ actions. In the lat-
ter, agents employ a Model of Other Agents (MOA)
to relax the need for centralized training. They note
that social influence reduces policy gradient variance,
which can increase with the number of agents (Lowe
et al., 2017).
Influence-Based Multi-Agent Exploration
Wang et al. (Wang et al., 2019) address limita-
tions in single-agent curiosity by proposing two ap-
proaches: exploration via information-theoretic in-
PIMAEX: Multi-Agent Exploration Through Peer Incentivization
573

fluence (EITI) and exploration via decision-theoretic
influence (EDTI). EITI uses mutual information to
quantify how an agent’s actions affect others’ learning
trajectories, while EDTI introduces the Value of Inter-
action (VoI), which evaluates the long-term influence
of one agent on another’s expected return, including
both extrinsic and intrinsic factors. They achieve this
using neural networks to approximate transition dy-
namics for large state spaces, thereby allowing EITI
and EDTI to be applied to complex environments.
3 PEER-INCENTIVIZED
MULTI-AGENT EXPLORATION
In multi-agent RL, exploration is significantly more
challenging than in single-agent scenarios because the
joint state space grows exponentially with the num-
ber of agents. As state transitions depend on joint ac-
tions, it is improbable that one agent alone can cover
much of the state space, so coordinated multi-agent
exploration is often essential. Although many works
address single-agent exploration or multi-agent coor-
dination, relatively few focus specifically on multi-
agent exploration (Section 2).
Building on prior work in intrinsic curiosity and
influence-based rewards, we introduce the Peer Incen-
tivized Multi-Agent Exploration (PIMAEX) reward
function (Section 3.1). PIMAEX rewards an agent
for influencing others to visit novel or rarely visited
states. It is a specific instance of a generalized multi-
agent social influence reward function (also intro-
duced in Section 3.1), general enough to encompass
approaches from (Jaques et al., 2018; Wang et al.,
2019) and to allow various influence measures and
communication channels.
To demonstrate this in practice, Section 4 presents
PIMAEX-Communication, a multi-agent training al-
gorithm inspired by (Jaques et al., 2018). It employs
a communication channel so agents can send mes-
sages, influencing one another’s behavior. Counter-
factual reasoning marginalizes the influence of each
agent’s message on others, enabling the PIMAEX re-
ward. As PIMAEX-Communication can work with
any actor-critic algorithm, we focus on the modifica-
tions needed for the communication channel, counter-
factual reasoning, and the PIMAEX reward rather than
on policy and value updates. These modifications af-
fect agents’ neural network inference functions and
the acting and learning components of the training
loop, discussed in Section 4.
3.1 Multi-Agent Social Influence
Reward Functions
We unify prior concepts (Jaques et al., 2018; Wang
et al., 2019) into a generalized social influence re-
ward. Within this framework, the PIMAEX reward
encourages exploration of novel states by combining
influence measures with intrinsic curiosity. Two influ-
ence types are included: policy influence (PI), akin to
causal influence in (Jaques et al., 2018), and value in-
fluence (VI), similar to the Value of Interaction (VoI)
in (Wang et al., 2019), detailed in Section 3.1.1.
3.1.1 Policy and Value Influence
Let in f o
j→i
denote information from agent j avail-
able to agent i at time t (e.g., past actions, observa-
tions, messages). An informed policy π
in f o
i
and value
function V
in f o
i
for agent i use both o
i
and in f o
j→i
.
The marginal policy π
marginal
j→i
and value V
marginal
j→i
ex-
clude in f o
j→i
, reflecting how i would behave if unin-
fluenced by j.
Marginal policies and values are computed by re-
placing in f o
j→i
with counterfactuals in f o
c f
j→i
and av-
eraging to remove its effect. Policy influence (PI)
measures the divergence between π
in f o
i
and π
marginal
j→i
,
while value influence (VI) is:
V I
j→i
= V
in f o
i
−V
marginal
j→i
(1)
Using D
KL
, policy influence is:
PI
D
KL
j→i
= D
KL
h
π
in f o
i
|π
marginal
j→i
i
, (2)
and using PMI,
PI
PMI
j→i
= log
p(a
i
, |, o
i
, in f o
j→i
)
p(a
i
, |, o
i
)
. (3)
3.1.2 Reward Functions
This unified social influence reward integrates direct
influence and the long-term value of that influence.
Following (Jaques et al., 2018; Wang et al., 2019),
agent j’s reward is:
r
j
=
∑
k̸= j
h
α ·PI
α
j→k
+ β ·PI
β
j→k
·r
w
k
+ γ ·V I
w
j→k
i
, (4)
where α, β, γ weight each term; PI
α
j→k
and PI
β
j→k
are influence measures like D
KL
or PMI; V I
w
j→k
is
weighted value influence; and r
w
k
is a weighted reward
stream for agent k.
PIMAEX uses both extrinsic and intrinsic rewards
within the weighted influence terms:
r
w
k
= β
env
·r
env
k
+ β
int
·r
int
k
V I
w
j→k
(5)
= γ
env
·VI
env
j→k
+ γ
int
·VI
int
j→k
. (6)
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
574

4 PIMAEX-COMMUNICATION
PIMAEX-Communication is a MARL algorithm in-
spired by (Jaques et al., 2018), where agents use dis-
crete communication policies and values. At each
timestep, agents emit discrete messages, forming a
communication channel for mutual influence. Coun-
terfactual reasoning is then employed to isolate the
effect of each agent’s message on others, enabling the
PIMAEX reward. PIMAEX-Communication can be
combined with any actor-critic approach, so details of
policy and value updates remain part of the underly-
ing method. Here, we focus on modifications needed
for communication, counterfactual reasoning, and the
PIMAEX reward.
4.1 Network Architecture
Two main modifications are required to implement
PIMAEX-Communication. First, each agent must
have a communication policy and value head, plus an
additional value head for intrinsic rewards. Second,
agents must input the joint communication observa-
tion (the concatenated message vector) to their net-
works. Following (Jaques et al., 2018), this message
vector is concatenated with environment features in
the last shared layer for all policy and value heads,
and an embedding layer is added between this shared
layer and the communication heads.
For marginal policy/value calculations, let N be
the number of agents, M the counterfactual mes-
sages per agent, and B the batch size. This creates
(N −1) ×M counterfactual observations per forward
pass. We compute the environment features once,
stack M copies, and merge batch dimensions for ef-
ficient batched calculations.
4.2 Actor and Learner
At each timestep, a PIMAEX-Communication actor
computes three value estimates (extrinsic, intrinsic,
and communication) and samples actions for both
communication and environment policies. For each
agent, M counterfactual communication actions are
also sampled (e.g., all possible discrete messages ex-
cept the one taken). These counterfactual vectors can
be centrally constructed or built individually by each
agent. Influence is computed on the actor side; in-
trinsic and PIMAEX rewards are computed on the
learner side, which uses Random Network Distillation
(RND)(Burda et al., 2018) to normalize intrinsic re-
wards. A one-step delay between communication ac-
tions and PIMAEX rewards aligns with (Jaques et al.,
2018). We use a weighted sum of environment, in-
trinsic, and PIMAEX rewards for the communication
policy; the environment policy uses environment and
intrinsic rewards only.
4.3 Technical Implementation Details
Our PIMAEX-Communication implementation
is built on acme(Hoffman et al., 2020) and
JAX(Bradbury et al., 2018). Because acme’s
PPO implementation (Schulman et al., 2017)
does not allow multiple value functions or reward
streams, we created a version permitting separate
policies, values, and weighted rewards. This flexible
implementation supports PPO, PPO+RND, and
PIMAEX-Communication, allowing distinct hyper-
parameters per reward, value, or policy. We also
adopted observation and reward normalization for
RND as recommended by (Burda et al., 2018).
5 EXPERIMENTAL SETUP
This section outlines the setup used to evaluate our
approach. We first introduce the Consume/Explore
environment (Section 5.1), a partially observable
multi-agent task designed to test the exploration-
exploitation dilemma and credit assignment. Then,
we detail agent configurations, including hyperpa-
rameters and network architectures, followed by our
evaluation methodology in Section 5.2, which covers
performance measures collected during training and
inference.
5.1 Consume/Explore Environment
The Consume/Explore environment challenges agents
with partial observability, a deceptive reward, and a
sequential social dilemma(Leibo et al., 2017), where
agents can cooperate or defect. Each of the N agents
owns a production line yielding C items every M
steps, stored in a depot with capacity S
max
. If the
depot is full, production pauses until space becomes
available. Agents start with S
init
items, and the param-
eters M, C
init
, C
max
, S
init
, S
max
control resource abun-
dance.
Agents have three actions: do nothing, consume
for reward R (if items are available), or explore to
eventually increase C but gain no immediate reward.
Increasing C requires c
max
successful explore ac-
tions; success depends on E (the coordination thresh-
old) and the number of simultaneous explore ac-
tions. Larger c
max
increases credit-assignment diffi-
culty. Unsuccessful exploration can incur a penalty
P.
PIMAEX: Multi-Agent Exploration Through Peer Incentivization
575
Our experiments used four agents per environ-
ment, with c
max
tuned so that increasing C by more
than two levels requires teamwork and E = 0.5 de-
manding at least two agents to explore simultane-
ously. Each agent’s five-element observation vector
includes three private elements (current supply, depot
capacity status, time to next yield) and two global el-
ements (current C and the count c toward C + 1). All
values are normalized to [0, 1].
5.2 Methodology
We evaluated PIMAEX-Communication alongside
two baselines: ’vanilla’ PPO and PPO+RND (using
Random Network Distillation(Burda et al., 2018)).
First, we ran exploratory training with ’vanilla’ PPO
to identify a challenging environment configuration
and used its hyperparameters (Table 2 in the Ap-
pendix) as a starting point. Next, we searched RND-
specific hyperparameters for PPO+RND (Table 3 in
the Appendix), then applied the best settings to all
PIMAEX-Communication agents. To isolate the ef-
fects of each PIMAEX term, we also trained ’single-
term’ agents using only one of α, β, or γ.
Each model was trained under three random seeds,
with results averaged. We evaluated inference perfor-
mance over 600 episodes per model (200 per seed),
also averaged. Key metrics include joint return (to
gauge team performance), individual returns (to see
division of labor), action statistics (consume vs. ex-
plore), state space coverage (measure of exploration),
and production yield (indicating cooperation). Faster
progression to higher yield levels implies stronger co-
ordination.
6 RESULTS
We compare the best-performing models of each
agent class: ’vanilla’ PPO, PPO with RND intrinsic
curiosity rewards (abbreviated as RND), and ’single-
term’ PIMAEX agents (PIMAEX α, PIMAEX β, and
PIMAEX γ). Hyperparameter settings for these mod-
els are given in Table 5 in the Appendix. As men-
tioned in the previous section, agent performance is
assessed using various measures, focusing on explo-
ration behavior.
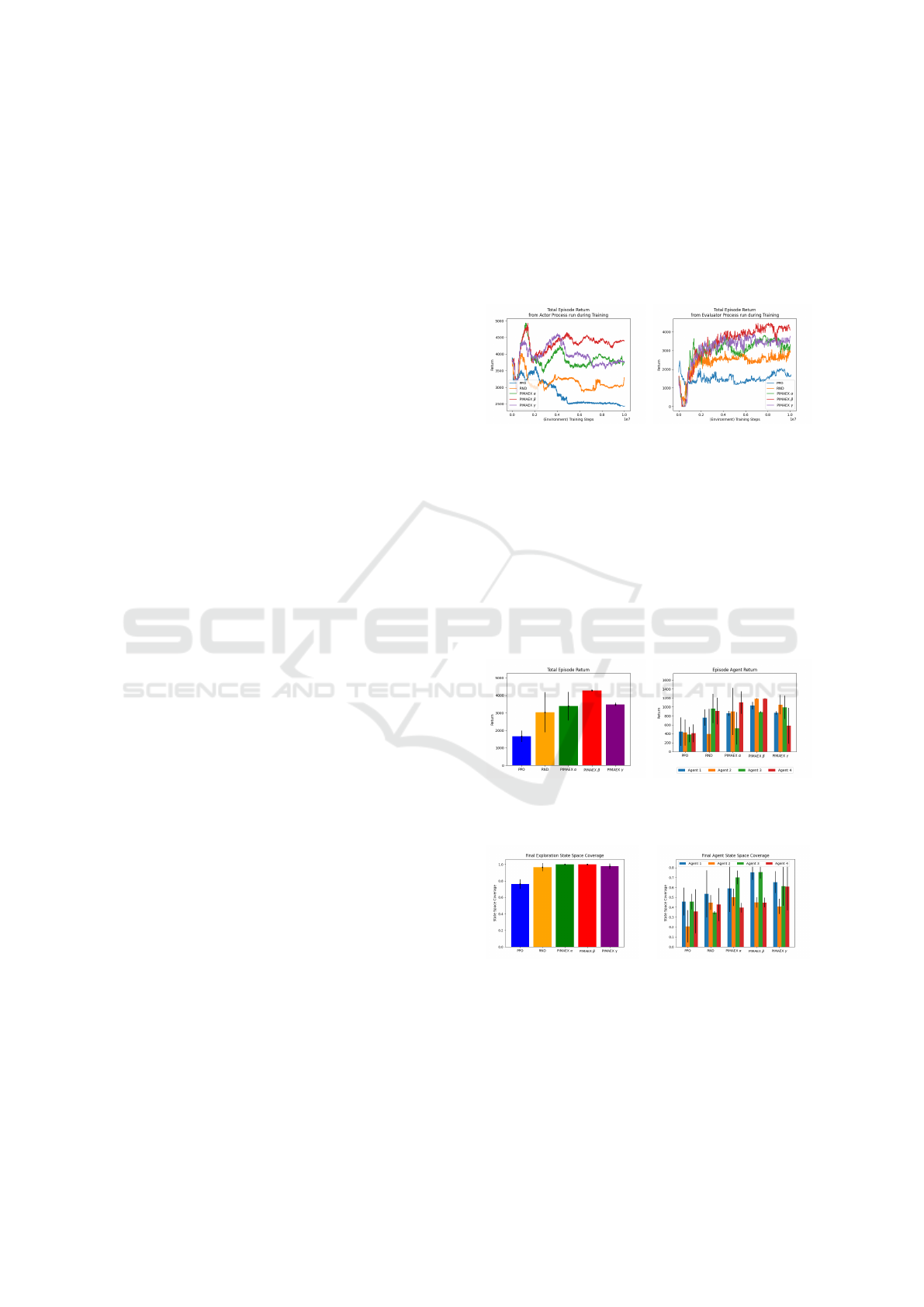
Fig. 1 displays the total episode return (joint re-
turn of all agents) over training. The left figure shows
return for actor processes (agents act stochastically),
and the right shows the evaluator process (agents act
greedily). ’Vanilla’ PPO agents fail to learn a success-
ful policy, performing worse as training progresses.
In contrast, curious agents (PPO+RND and PIMAEX
agents) initially prioritize maximizing intrinsic return,
resulting in low extrinsic return early on, likely due to
higher prediction error in the RND model at the start
of training. However, this does not hinder long-term
performance: PPO+RND outperforms ’vanilla’ PPO,
and is itself outperformed by ’single-term’ PIMAEX
agents, with PIMAEX β being the best-performing
method.
(a) Actor processes return (b) Evaluator process return
Figure 1: Overall return per episode for best training run of
each agent category.
These trends are confirmed in Fig. 2, which shows
mean and standard deviation of total joint episode
return and per-agent individual return at inference
time. Again, ’single-term’ PIMAEX agents, with PI-
MAEX β as the best, outperform PPO+RND, which
outperforms ’vanilla’ PPO. Notably, PIMAEX β ex-
hibits significantly less standard deviation than other
methods, a consistent pattern across all performance
metrics.
(a) Overall episode return (b) Per-agent episode return
Figure 2: Per-episode overall and per-agent returns from
evaluation runs.
(a) Exploration state space
coverage
(b) Agent state space cover-
age
Figure 3: Final state space coverage for best training run of
each agent category.
Differences in state space coverage are less pro-
nounced than those observed in returns. While fi-
nal exploration state space coverage varies slightly
among methods (except for PPO), differences are
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
576
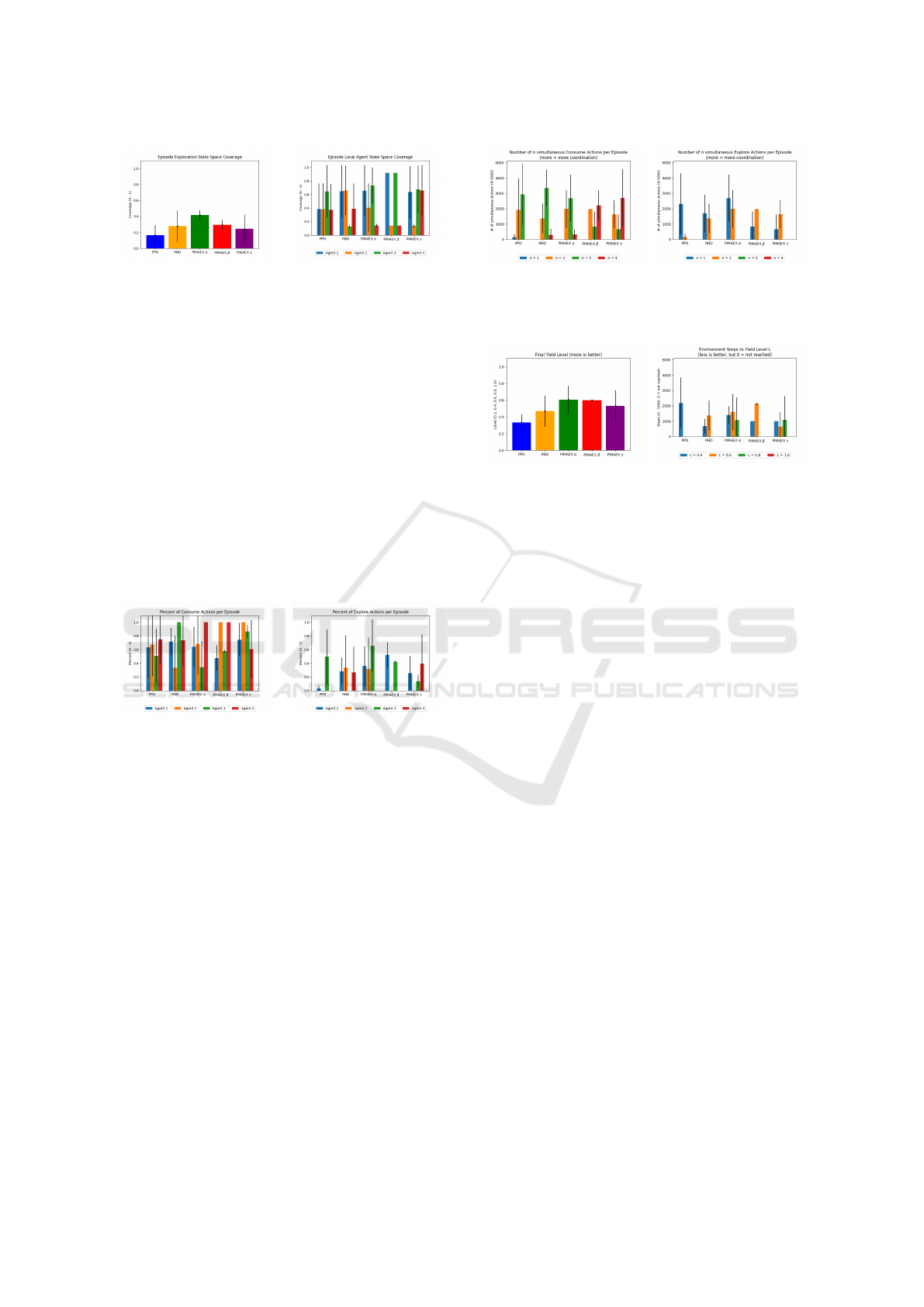
(a) Exploration state space
coverage
(b) Local agent state space
coverage
Figure 4: Per-episode exploration and local agent state
space coverage from evaluation runs.
more evident when examining coverage within an
episode. Here, PIMAEX α agents are the best explor-
ers, despite not participating in other agents’ intrin-
sic returns like the β and γ agents. This suggests that
influence rewards combined with individual curiosity
may suffice to enhance multi-agent exploration. No-
tably, PIMAEX β agents exhibit significantly reduced
standard deviation in both local agent state space cov-
erage within an episode and final agent state space
coverage after training.
An interesting observation is that PIMAEX β
agents appear to specialize in teams of two: agents
1 and 3 are the best explorers, while agents 2 and 4
explore less, especially within an episode.
(a) Consume actions per
agent
(b) Explore actions per agent
Figure 5: Per-episode percentage of consume and explore
actions per agent.
Fig. 5 confirms these findings. It shows that PI-
MAEX β agents 2 and 4 predominantly consume and
rarely explore. Again, PIMAEX α agents are the most
active explorers, followed by RND and PIMAEX γ.
This supports the hypothesis that participating in oth-
ers’ intrinsic returns does not necessarily promote
more exploration, and that individual intrinsic returns,
possibly combined with influence rewards, can drive
multi-agent exploration.
Examining the number of simultaneous consume
(left) or explore (right) actions in Fig. 6, none of
the agent classes coordinate explore actions in teams
larger than two, though they do so for consumption.
When focusing on pairs of simultaneous explore ac-
tions, PIMAEX agents explore in teams of two for
about one-third of the episode, closely followed by
RND. Again, PIMAEX β agents display considerably
less standard deviation than others.
(a) Simultaneous consume ac-
tions
(b) Simultaneous explore ac-
tions
Figure 6: Number of simultaneous consume and explore
actions per episode from evaluation runs.
(a) Final yield level (b) Steps to reach yield level
Figure 7: Final yield level and steps to reach yield level
from evaluation runs.
7 CONCLUSION
This work introduced two reward functions: the
PIMAEX reward, a peer incentivization mechanism
based on intrinsic curiosity and social influence, and
a more generalized version usable by agents without
intrinsic curiosity (though not evaluated here). The
PIMAEX-Communication training algorithm, com-
patible with any actor-critic method, adopts a com-
munication mechanism from (Jaques et al., 2018) and
can be implemented easily atop existing algorithms.
The Consume/Explore environment presented in this
work is also a flexible tool for researching multi-
agent reinforcement learning. Empirically, PIMAEX-
Communication improves overall returns in the Con-
sume/Explore task compared to baselines without so-
cial influence. Notably, PIMAEX β achieves the high-
est return, though the findings indicate that participat-
ing in others’ intrinsic returns does not always yield
more exploration. Interestingly, PIMAEX α, which
relies only on social influence and individual curios-
ity, exhibits the strongest exploratory behavior, and
PIMAEX β shows the most stable policies.
However, this work has limitations. It uses only
small, feed-forward networks and evaluates PIMAEX
with PPO on a single task and limited training time.
Future work should explore larger or recurrent ar-
chitectures, alternative actor-critic methods (e.g., IM-
PALA(Espeholt et al., 2018)), and more complex
settings with larger state and action spaces or more
agents. Addressing these limitations will help deter-
PIMAEX: Multi-Agent Exploration Through Peer Incentivization
577

mine the broader effectiveness of PIMAEX in multi-
agent reinforcement learning.
ACKNOWLEDGEMENTS
This work is part of the Munich Quantum Valley,
which is supported by the Bavarian state government
with funds from the Hightech Agenda Bayern Plus.
This paper was partly funded by the German Federal
Ministry of Education and Research through the fund-
ing program “quantum technologies — from basic re-
search to market” (contract number: 13N16196).
REFERENCES
Bellemare, M. G., Srinivasan, S., Ostrovski, G., Schaul, T.,
Saxton, D., and Munos, R. (2016). Unifying count-
based exploration and intrinsic motivation.
Bradbury, J., Frostig, R., Hawkins, P., Johnson, M. J., Leary,
C., Maclaurin, D., Necula, G., Paszke, A., VanderPlas,
J., Wanderman-Milne, S., and Zhang, Q. (2018). JAX:
composable transformations of Python+NumPy pro-
grams.
Burda, Y., Edwards, H., Storkey, A., and Klimov, O. (2018).
Exploration by random network distillation.
Espeholt, L., Soyer, H., Munos, R., Simonyan, K., Mnih, V.,
Ward, T., Doron, Y., Firoiu, V., Harley, T., Dunning,
I., Legg, S., and Kavukcuoglu, K. (2018). Impala:
Scalable distributed deep-rl with importance weighted
actor-learner architectures.
Foerster, J., Farquhar, G., Afouras, T., Nardelli, N., and
Whiteson, S. (2017). Counterfactual multi-agent pol-
icy gradients.
Fu, W., Yu, C., Xu, Z., Yang, J., and Wu, Y. (2022). Re-
visiting some common practices in cooperative multi-
agent reinforcement learning.
Hoffman, M. W., Shahriari, B., Aslanides, J., Barth-Maron,
G., Momchev, N., Sinopalnikov, D., Sta
´
nczyk, P.,
Ramos, S., Raichuk, A., Vincent, D., Hussenot, L.,
Dadashi, R., Dulac-Arnold, G., Orsini, M., Jacq, A.,
Ferret, J., Vieillard, N., Ghasemipour, S. K. S., Girgin,
S., Pietquin, O., Behbahani, F., Norman, T., Abdol-
maleki, A., Cassirer, A., Yang, F., Baumli, K., Hen-
derson, S., Friesen, A., Haroun, R., Novikov, A., Col-
menarejo, S. G., Cabi, S., Gulcehre, C., Paine, T. L.,
Srinivasan, S., Cowie, A., Wang, Z., Piot, B., and
de Freitas, N. (2020). Acme: A research framework
for distributed reinforcement learning. arXiv preprint
arXiv:2006.00979.
Jaques, N., Lazaridou, A., Hughes, E., Gulcehre, C., Or-
tega, P. A., Strouse, D., Leibo, J. Z., and de Freitas,
N. (2018). Social influence as intrinsic motivation for
multi-agent deep reinforcement learning.
Leibo, J. Z., Zambaldi, V., Lanctot, M., Marecki, J., and
Graepel, T. (2017). Multi-agent reinforcement learn-
ing in sequential social dilemmas.
Lowe, R., Wu, Y., Tamar, A., Harb, J., Abbeel, P., and Mor-
datch, I. (2017). Multi-agent actor-critic for mixed
cooperative-competitive environments.
Ostrovski, G., Bellemare, M. G., Oord, A. v. d., and Munos,
R. (2017). Count-based exploration with neural den-
sity models.
Oudeyer, P.-Y., Kaplan, F., and Hafner, V. V. (2007). Intrin-
sic motivation systems for autonomous mental devel-
opment. IEEE Transactions on Evolutionary Compu-
tation, 11(2):265–286.
Pathak, D., Agrawal, P., Efros, A. A., and Darrell, T. (2017).
Curiosity-driven exploration by self-supervised pre-
diction.
Peng, P., Wen, Y., Yang, Y., Yuan, Q., Tang, Z., Long,
H., and Wang, J. (2017). Multiagent bidirectionally-
coordinated nets: Emergence of human-level coordi-
nation in learning to play starcraft combat games.
Rashid, T., Samvelyan, M., de Witt, C. S., Farquhar, G.,
Foerster, J., and Whiteson, S. (2018). Qmix: Mono-
tonic value function factorisation for deep multi-agent
reinforcement learning.
Schmid, K., Belzner, L., and Linnhoff-Popien, C. (2021).
Learning to penalize other learning agents. In Pro-
ceedings of the Artificial Life Conference 2021, vol-
ume 2021. MIT Press.
Schmidhuber, J. (1991). A possibility for implementing
curiosity and boredom in model-building neural con-
trollers. In Proceedings of the First International Con-
ference on Simulation of Adaptive Behavior on From
Animals to Animats, page 222–227, Cambridge, MA,
USA. MIT Press.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization al-
gorithms.
Stadie, B. C., Levine, S., and Abbeel, P. (2015). Incentiviz-
ing exploration in reinforcement learning with deep
predictive models.
Sukhbaatar, S., Szlam, A., and Fergus, R. (2016). Learning
multiagent communication with backpropagation.
Tang, H., Houthooft, R., Foote, D., Stooke, A., Chen, X.,
Duan, Y., Schulman, J., De Turck, F., and Abbeel, P.
(2016). #exploration: A study of count-based explo-
ration for deep reinforcement learning.
Wang, T., Wang, J., Wu, Y., and Zhang, C. (2019).
Influence-based multi-agent exploration.
Yang, J., Li, A., Farajtabar, M., Sunehag, P., Hughes, E.,
and Zha, H. (2020). Learning to incentivize other
learning agents.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
578

APPENDIX
Table 1: Environment hyperparameters and settings used by
all experiments.
Parameter Value
Number of agents (N) 4
Episode length in steps 5000
Reward per consumption (R) 1
Exploration failure penalty (P) 0
Production cycle time in steps (M) 10
Initial production yield level (C
init
) 1
Maximum production yield level (C
max
) 5
Initial supply (S
init
) 0
Maximum supply depot capacity (S
max
) 10
Exploration success threshold E 0.5
Num. of successful explore actions c
max
2000
Table 2: Common training hyperparameters and settings
used by all experiments. All training runs were repeated
with three seeds and results averaged.
Parameter Value
Environment training steps 1e7
Optimiser Adam
Learning rate 1e-4
Adam ε 1e-7
Max. gradient norm 0.5
Batch size 16
Unroll length 128
Num minibatches 4
Num epochs 4
Discount γ
E
0.999
GAE λ 0.95
Entropy cost 1e-3
PPO clipping ε 0.1
Num Actor Processes 16
Table 3: Training hyperparameters and settings used by all
PPO+RND experiments. Lists of values indicate these were
included in hyperparameter search, whereas all other values
remain fixed in all training runs.
Parameter Value
Intrinsic discount γ
I
0.99
Infinite time horizon for intrin-
sic return
True
Extrinsic and intrinsic reward
coefficients
[(2.0, 1.0), (1.0, 0.5)]
Max. abs. intrinsic reward [False, 1.0]
Separate neural network for in-
trinsic value
[False, True]
Proportion of experience used
for training RND predictor
[0.25, 1.0]
RND observation normalisa-
tion initialisation environment
steps
1e5
Table 4: Training hyperparameters and settings used by
all PIMAEX-Communication experiments. Lists of val-
ues indicate these were included in hyperparameter search,
whereas all other values remain fixed in all training runs.
Parameter Value
Communication discount γ
C
0.99
Communication entropy cost 7.89e-4
Communication loss weight [1.0, 0.0758]
Communication reward coefficients
(for extrinsic, intrinsic, and PIMAEX
rewards)
(0.0, 0.0, 2.752)
Policy influence measure [KL
D
, PMI]
Extrinsic and intrinsic reward coeffi-
cients
(1.0, 0.5)
Max. abs. intrinsic reward False
Separate neural network for intrinsic
value
False
Proportion of experience used for
training RND predictor
0.25
Table 5: Hyperparameters of best-performing PIMAEX
agents.
Parameter PIMAEX α PIMAEX β PIMAEX γ
Communication
loss weight
0.0758 1.0 0.0758
Policy in-
fluence
measure
KL
D
PMI -
Extrinsic/intrinsic
coefficients
for β and γ
- (0.0, 1.0) (0.0, 1.0)
α 1.0 0.0 0.00
β 0.0 1.0 0.00
γ 0.0 0.0 0.01
PIMAEX: Multi-Agent Exploration Through Peer Incentivization
579
