
Belief Re-Use in Partially Observable Monte Carlo Tree Search
Ebert Theeuwes
1 a
, Gabriele Venturato
1 b
and Gavin Rens
2 c
1
KU Leuven, Dept. of Computer Science, B-3000 Leuven, Belgium
2
Computer Science Division, Stellenbosch University, Stellenbosch, South Africa
Keywords:
Partially Observable Markov Decision Processes, Monte Carlo Tree Search, Locality-Sensitive Hashing,
Transposition Nodes, Belief Re-Use.
Abstract:
Partially observable Markov decision processes (POMDPs) require agents to make decisions with incomplete
information, facing challenges like an exponential growth in belief states and action-observation histories.
Monte Carlo tree search (MCTS) is commonly used for this, but it redundantly evaluates identical states
reached through different action sequences. We propose Belief Re-use in Online Partially Observable Plan-
ning (BROPOP), a technique that transforms the MCTS tree into a graph by merging nodes with similar
beliefs. Using a POMDP-specific locality-sensitive hashing method, BROPOP efficiently identifies and reuses
belief nodes while preserving information integrity through update-descent backpropagation. Experiments on
standard benchmarks show that BROPOP enhances reward performance with controlled computational cost.
1 INTRODUCTION
Partially observable Markov decision processes
(POMDPs) (Smallwood and Sondik, 1973) are noto-
riously used to model problems where an agent needs
to make sequential decisions (planning) in a partially
observable stochastic environment. In these prob-
lems, the agent only has a ‘belief’ about the cur-
rent state that is represented by a belief state, that
is, a probability distribution over all possible ex-
plicit states. POMDPs are hard problems (Papadim-
itriou and Tsitsiklis, 1987; Mundhenk et al., 2000).
Their belief state space grows exponentially on the
number of state variables (curse of dimensionality),
and also the number of action-observation histories
suffers from an exponential growth (curse of his-
tory) (Kaelbling et al., 1998). Monte Carlo tree
search (MCTS) is a standard technique to tackle these
‘curses’, both in planning (Silver and Veness, 2010;
Browne et al., 2012) and in reinforcement learn-
ing (Schrittwieser et al., 2020). However, when dif-
ferent action-observation sequences lead to the same
state, they are still treated as separate nodes in the
MCTS tree, meaning they are expanded and evalu-
ated multiple times. This is further complicated by
the fact that POMDPs work on an uncountable set of
a
https://orcid.org/0009-0009-2220-5166
b
https://orcid.org/0000-0002-0048-0898
c
https://orcid.org/0000-0003-2950-9962
belief states, where a slight variation in the belief dis-
tribution can correspond to the same explicit state.
Therefore, we propose a new technique for Be-
lief Re-use in Online Partially Observable Planning
(BROPOP), where we move from an MCTS tree to
a graph, by merging nodes that correspond to simi-
lar beliefs. Specifically, we leverage locality-sensitive
hashing (LSH) (Datar et al., 2004) by introducing our
novel POMDP-specialized hashing algorithm to ef-
ficiently compare a new node with all the existing
ones already in the MCTS graph. Moreover, we ad-
dress the problem of backpropagating the values in
this graph in an update-descent fashion (Czech et al.,
2021), which ensures limited information leakage.
Finally, we evaluate our method on a set of stan-
dard POMDP benchmarks, showing that belief re-use
positively impacts reward performance while keeping
the computational performance under control.
2 BACKGROUND
2.1 Partially Observable Markov
Decision Processes
POMDPs model the same underlying problem as
Markov decision processes (MDPs), but they add par-
tially observable states observed via noisy sensors.
634
Theeuwes, E., Venturato, G. and Rens, G.
Belief Re-Use in Partially Observable Monte Car lo Tree Search.
DOI: 10.5220/0013265200003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 634-645
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
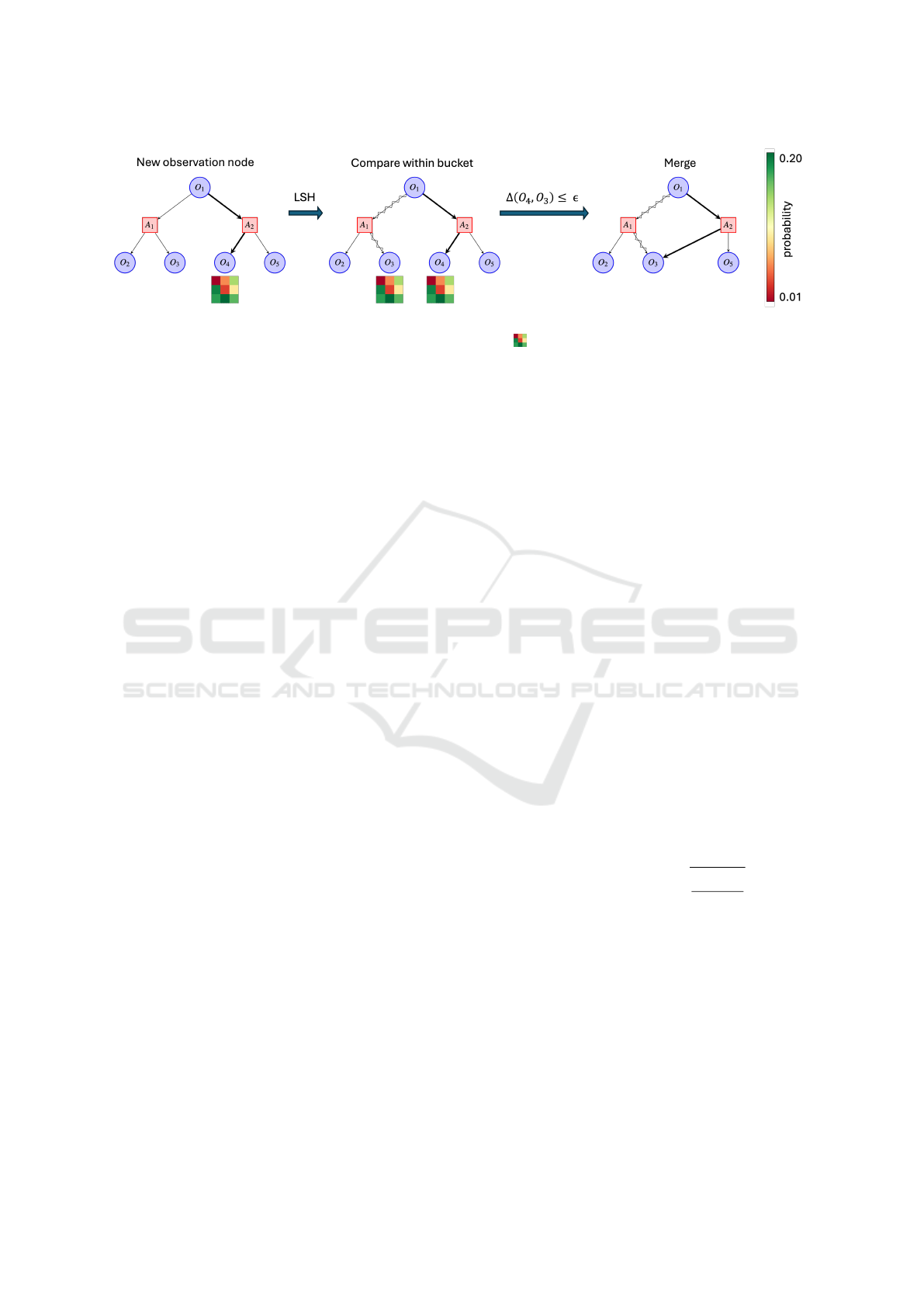
Figure 1: Our proposed method, BROPOP. When a new observation node O
4
is added to the Monte Carlo search tree, we use
locality-sensitive hashing (LSH) to efficiently compare the belief state ( ) of O
4
with the ones that are hashed into the same
‘bucket’ (O
3
). A similarity distance measure, ∆, is used to decide whether to merge two nodes if they are within a given ε
threshold.
POMDPs (Smallwood and Sondik, 1973) are repre-
sented by the tuple (S, A, T, R, Z, O), where, S is the
set of states, A is the set of actions and Z is the set of
observations. The transition function T : S ×A ×S →
[0, 1] specifies the probability T (s, a, s
′
) of ending up
in state s
′
after executing an action a in state s. The
reward function R: S ×A → R specifies the reward
R(s, a) of executing action a in state s. The observa-
tion function O: S×A×Z →[0, 1] specifies the proba-
bility O(s
′
, a, z) of observing z when executing action
a and ending up in state s
′
.
As an example, imagine a robot in a grid world
that is equipped with a noisy sensor. The robot does
not know in which state it is, but after taking an ac-
tion, it will get an observation from the environment
(via its noisy sensor), which will tell the robot some-
thing about its actual state via its observation func-
tion. The job of a planner algorithm is to find the
optimal policy, that is, the best action in each state.
This is done by taking into account the uncertainty of
the current state. A belief state is a probability dis-
tribution over all possible states, represented as a list
of state-probability pairs (s, b(s)) for each state s ∈ S.
Each pair (s, b(s)) indicates the probability b(s) that
the agent is in state s. By making use of the transi-
tion and observation function, we are able to keep the
belief state up to date throughout the problem. The
update of the belief state is done as follows (Somani
et al., 2013):
b
t
(s
′
) = ηO(s
′
, a
t−1
, z
t
)
∑
s∈S
T (s, a
t−1
, s
′
)b
t−1
(s),
where b
t
(s) denotes the probability (belief) of being
in the state s at time t, and η is a normalization con-
stant. The full belief state b
t
= τ(b
t−1
, a
t−1
, z
t
) at time
t is the calculation of b
t
(s
′
) for each state s
′
.
2.2 Partially Observable Monte Carlo
Planning
Monte Carlo tree search (MCTS) is a tree search algo-
rithm that was designed to be an efficient alternative
to full scale tree search while still converging to the
optimal policy at infinity (Browne et al., 2012). The
MCTS algorithm operates by generating the search
tree in a step-by-step manner. Each iteration con-
sists out of four steps (Levine, 2017; Browne et al.,
2012): (i) Tree traversal/Selection, (ii) Node expan-
sion, (iii) Rollout/Simulation, (iv) Backpropagation.
For POMDPs, such an MCTS tree contains obser-
vation nodes (with a belief state) and action nodes.
Observation nodes represent the current observation.
These nodes are followed by action nodes, represent-
ing each possible action (see Figure 1).
Partially Observable Monte-Carlo Planning
(POMCP) is an algorithm introduced by Silver and
Veness (2010), that uses MCTS for online planning
in POMDPs. The selection step (i) is to branch down
the tree until reaching a leaf node. This tree traversal
is done by repeatedly choosing the next action node
from the current observation node by the use of the
UCB1 (Saffidine et al., 2012) function:
UCB1(x) = µ(x) + c ·
s
ln(p(x))
n(x)
,
where µ(x) is the average reward attached to the ac-
tion node x. Each action node starts with µ set to
zero and is updated in the backpropagation step. c
is the exploration constant that balances the trade-
off between exploration and exploitation. The visi-
tation count of a node x, denoted by n(x), represents
the number of times the node was visited in the al-
gorithm. It also gets updated in the backpropagation
step. p(x) is the total number of payoffs, that is, the
number of times the node was considered to be tra-
versed. Because each action node has only one parent
Belief Re-Use in Partially Observable Monte Carlo Tree Search
635

observation node, this value is just the visitation count
of the parent observation node. When the desired
action node is chosen, we make use of a generator
function to generate a possible next observation. This
observation is sampled according to the correct prob-
abilities in order to find the next observation node,
which also generates an immediate reward that gets
accumulated for later. Upon reaching a leaf node, a
node expansion (ii) is done, which creates a new ob-
servation node action nodes pair. If the desired depth
has not yet been reached, a random simulation (iii)
is performed. Finally, the accumulated rewards are
propagated back (iv) in the tree to update the average
rewards and visitation counts. These accumulated re-
wards are also discounted such that steps farther in the
future have smaller weight.
2.3 Similarity Distance Measures
In order to re-use observation nodes, a measure of
similarity between belief states is essential. This re-
quires distance measures that quantify the difference
between two probability distribution vectors (belief
states). In this work, we consider the following dis-
tance measures.
2.3.1 Euclidean Distance
The Euclidean distance (Cohen et al., 1997) measures
the length of a straight line connecting two points in a
Euclidean space:
d(p, q) =
v
u
u
t
k
∑
i=1
(p
i
−q
i
)
2
.
2.3.2 Hellinger Distance
The Hellinger distance (Chen et al., 2019) is an f-
divergence. This means it was specifically designed to
measure the difference between two probability distri-
bution vectors. It is defined by the following formula:
H(p, q) =
1
√
2
v
u
u
t
k
∑
i=1
(
√
p
i
−
√
q
i
)
2
.
We can rewrite it by using the Euclidean distance:
H(p, q) =
1
√
2
d(
√
p,
√
q). (1)
2.3.3 Jensen–Shannon Divergence
The Jensen–Shannon divergence (Chen et al., 2019)
is a symmetric variant of the Kullback–Leibler diver-
gence (Kullback, 1951). It is also an f-divergence and
has the following formula:
JSD(p ∥ q) =
1
2
D
KL
(p ∥m) +
1
2
D
KL
(q ∥ m),
where, m is:
m =
p + q
2
,
and D
KL
is the Kullback–Leibler divergence:
D
KL
(p ∥q) =
k
∑
i=1
p
i
log
p
i
q
i
.
We do not use Kullback–Leibler divergence by itself
because it is asymmetric, meaning that it produces
different results based on argument order. While this
can be useful in likelihood theory with distinct prior
and posterior distributions (Shlens, 2014), our ap-
proach merges observation nodes without such dis-
tinction, making a symmetric measure more suitable.
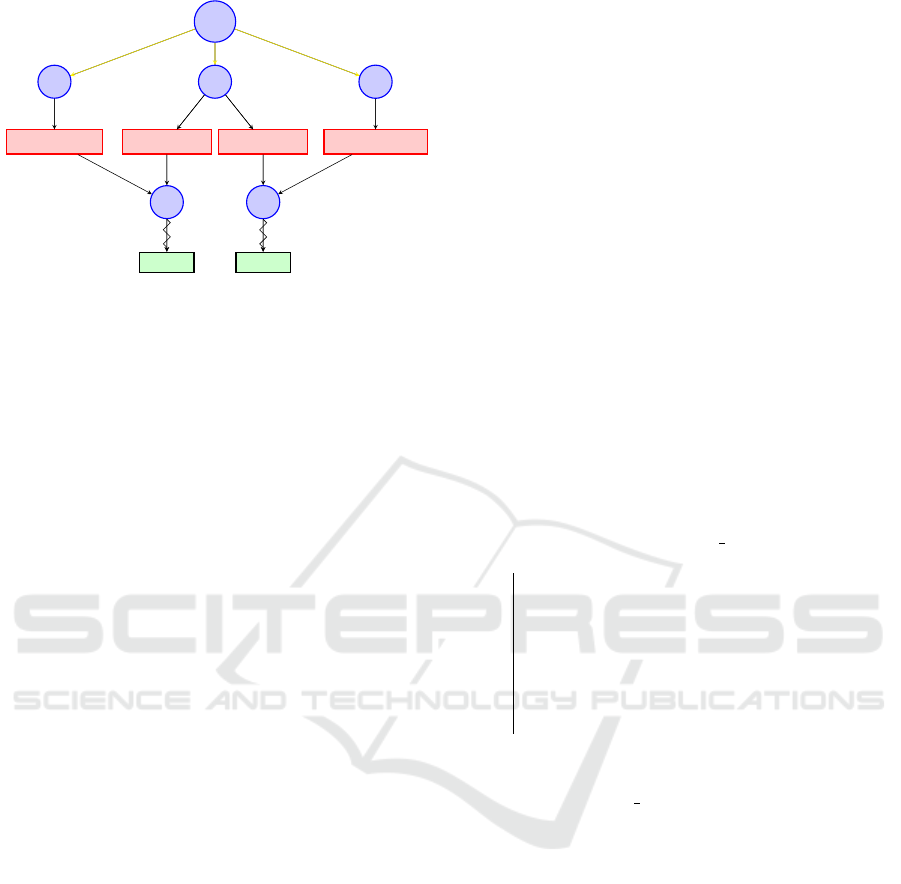
2.4 Information Leak Problem
There is an intrinsic problem to backpropagating in an
MCTS graph, that is, where certain nodes have mul-
tiple parent nodes, compared to an MCTS tree. This
is known as the information leak problem (Saffidine
et al., 2012), visualized in Figure 2. For the sake of
simplicity, the discount factor here is set equal to 1
and there are no immediate rewards. Imagine being in
observation node O
2
, one can either go to action node
A
2
or A
3
. Here, the action node A
2
is always selected,
because of the higher average reward (µ) and a lower
visitation count (n). By bad luck, action node A
3
got
an average reward of 0.4 over a limited amount of 6
visitations. However, action node A
3
actually leads
to a higher expected reward. The intrinsic problem is
that sufficient information is actually in the tree, but it
is just not accessible from action node A
3
, because it
was backpropagated to action node A
4
instead. Exam-
ining A
4
, we see that it has the highest average reward
in the observable tree. All its rewards were also back-
propagated through observation node O
5
. If we com-
pute the average rewards of O
5
’s child action nodes,
weighted by their visitation counts, we find that ac-
tion node A
3
actually is superior. Thus, although this
information is present in the tree, it is not accessible
from A
3
(because the rewards were backpropagated to
A
4
instead), creating the information leak problem.
3 RELATED WORK
Similar node re-use techniques have already been re-
searched for games. In this setting, a node that gets
re-used is called a transposition node. This occurs for
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
636
Root
O
1
A
1
(µ:0.5, n:17)
O
2
A
2
(µ:0.5, n:5)
O
4
E = 0.5
A
3
(µ:0.4, n:6)
O
5
E = 0.6
O
3
A
4
(µ:0.66, n:21)
Figure 2: Information leak problem. The yellow lines repre-
sent underlying paths from the root to the observation node.
The zigzag lines point to the expected reward of going down
that path.
example in the game of chess, where a specific board
state can be reached via a variety of different move
combinations. Instead of doing search separately for
all nodes representing this board state, it is better to
merge them together in one transposition node. Nev-
ertheless, there are still notable differences between
MCTS trees for games and POMDPs. First, games
have a different tree structure (no observation and ac-
tion nodes but separate nodes for each player). Sec-
ond, a discount factor is not used when backpropagat-
ing in games. That is because one is only concerned
with winning the game (and thus backpropagating a
win, loss or draw), and not with maximizing some
long term reward.
Saffidine et al. (2012) introduce a framework for
transposition nodes in MCTS trees for games, that
deals with the information leak problem. They solve it
by introducing a new measure for representing the av-
erage reward at a certain edge. It is called the adapted
score and makes use of a hyperparameter for the
depth. This adapted score is calculated every time one
needs the average reward for the UCB1 function. It is
calculated by using the average rewards for all edges
deeper in the tree, until the desired depth is reached.
This method can deal with the information leak, but
it will create a big overhead to recalculate this score
over and over again. Choe and Kim (2019) intro-
duce a new backpropagation scheme. What they do is
standard update-descent backpropagation (backprop-
agating according to the path one descends from) but
upon reaching a transposition node, they do update-
all (backpropagating to all accessible nodes) until a
certain height is reached. This will ensure that the
average rewards suffer less from information leak.
However, it suffers from the bad side effects associ-
ated with update-all, such as overhead, as described
by Saffidine et al. (2012). Finally, Czech et al. (2021)
measure the information leak in a node above a trans-
position node during tree traversal. This can be done
by comparing their average rewards with each other.
When the difference between them is larger than some
threshold, we know that there is a leak of information.
When this is measured, the search is stopped and a
correction value is backpropagated instead.
4 BROPOP
The main idea of belief re-use is that if two beliefs are
similar enough, then they should be merged into the
same node. Specifically, given that a belief is a proba-
bility distribution represented as a vector, the smaller
the distance between two vectors, the more similar
they are. This means that when the distance between
two belief states is smaller than a certain threshold,
their observation nodes should be merged together.
This happens in the Merge procedure, accessed in Al-
gorithm 1.
Data: o
node
, a
node
, z
Result: New observation node o
node2
Initialization: o
node2
← get child(a
node
, z);
if o
node2
is nothing then
b ← τ(o
node
.b, a
node
.a, z);
create o
node2
;
o
node2
.b ← b;
o
node2
.n ← 0;
o
node2
.z ← z;
push(a
node
.c, o
node2
);
Merge(o
node2
);
end
return o
node2
;
Algorithm 1: The Get o
node
procedure, to create, and pos-
sibly merge, a new observation node, given the current ob-
servation o
node
and action a
node
nodes, as well as the obser-
vation from the environment z. For a given node, .b is the
belief, .a is the action, .c is the list of children and .n is the
visitation count.
In the Merge procedure, the observation node is
hashed to its bucket and then compared with all nodes
in there. If its distance with one node is smaller than
a certain threshold, they should be merged together.
The factorization of the belief state space into buckets
is performed via LSH.
Our method consists of two main novelties. First,
we use locality-sensitive hashing (LSH) to efficiently
compare a new observation node to already existing
nodes in the MCTS graph. Second, we use a back-
propagation technique with minimum overhead to up-
date the information in the nodes. Their synergy in
an MCTS-like algorithm resulting in Belief Re-use in
Online Partially Observable Planning (BROPOP).
Belief Re-Use in Partially Observable Monte Carlo Tree Search
637

4.1 Locality-Sensitive Hashing
A major time drawback of merging observation nodes
is the overhead from comparing nodes. That is be-
cause we need to compare each new observation
node with each existing observation node. By us-
ing locality-sensitive hashing (LSH), this overhead
is heavily reduced. LSH is a hashing technique that
takes in as input a vector (i.e. a belief) and returns a
bucket, represented by an integer. LSH tries to maxi-
mize the probability of a hash collision occurring be-
tween similar vectors. A hash collision happens when
distinct vectors get assigned the exact same bucket.
This way, a specific bucket will only contain vectors
that are similar or close to one another.
According to the definition of LSH, the collision
probability of two vectors x and y is proportional to
the similarity between them (Charikar, 2002):
Pr [h(x) = h(y)] ∝ sim(x, y).
These collision probability functions can further be
manipulated by using multiple instances of the same
hash function. This means that two vectors only col-
lide when they have the same bucket for every used
hash function. For example, when one would use N
of such hash functions, the collision probability will
take the following value:
Pr [h
N
(x) = h
N
(y)] = Pr [h(x) = h(y)]
N
.
4.1.1 Using the Similarity Distance Measures
Euclidean Distance. To hash observation nodes
based on the Euclidean distance between their be-
lief states, we use the following formula proposed by
Datar et al. (2004) for a belief state v:
h
a,b
(v) =
a ·v + b
r
. (2)
In this formula, the parameters are defined as follows:
• a: A randomly generated vector of the same di-
mensions as v, its entries are drawn i.i.d. from a
standard Gaussian distribution.
• b: A real number that is selected uniformly from
[0, r].
• r: A chosen real number that determines the bin
width.
Note that a and b are fixed throughout the entire algo-
rithm. In this function, each vector v will be projected
on the same one dimensional ‘line’. This ‘line’ will
be divided in equal segments of width r. The parame-
ter b is just a bias term. When taking the floor of this
function, the output will be an integer specifying the
bin or bucket of the observation node. The exact colli-
sion probability function, together with its derivation,
can be found in Datar et al. (2004).
Hellinger Distance. Since the Hellinger distance is
closely related to the Euclidean distance (see equation
1), we can easily adapt the previous hash function (in
equation 2) (Chen et al., 2019):
h
H
a,b
(v) =
a ·
√
v + b
r
. (3)
In fact, we do not even have to create a new hash func-
tion:
h
H
a,b
(v) = h
a,b
(
√
v).
The behavior of the related collision probability func-
tion is similar to the one for the Euclidean distance
and be found in Chen et al. (2019).
Jensen-Shannon Divergence. There is no direct re-
lation between Jensen-Shannon divergence and ei-
ther Euclidean or Hellinger distance. There is also
no currently known LSH technique that is able to
fully capture the Jensen-Shannon divergence (Mao
et al., 2017). However, Jensen-Shannon divergence
has an upper and lower bound relative to the squared
Hellinger distance (Chen et al., 2019):
LH
2
(p, q) ≤ JSD(p ∥ q) ≤ H
2
(p, q),
with:
L = −ln
1
2
.
The proof for this can be found in Chen et al. (2019).
We can now use the same LSH function as the one
used for the Hellinger distance in equation 3. For the
collision probability function, we use two functions to
establish upper and lower bound probabilities. This is
detailed in Chen et al. (2019).
4.1.2 Using the Deterministic Part of Belief
States
Most POMDP problems contain both non-
deterministic and deterministic information within
their belief states. The deterministic part allows
100% certainty about some aspects of the agent’s
current state. For instance, if the agent’s position is
known, only states matching this position will have
non-zero entries in the belief state. One should never
merge two belief states that are not equal in their
deterministic part. This is an extra check that we add
in the merging algorithm.
This concept can also optimize the LSH by cre-
ating a bucket for each deterministic component of
the belief state, like a bucket for each position. To
make optimal use of LSH, this approach should be
combined with the earlier proposed hash functions.
This is done by first hashing to an overarching bucket
(by
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
638

Data: o
node
Result: The best action
if terminal(o
node
.b) then
return nothing;
end
while not Timeout() do
s ∼ o
node
.b;
Simulate(o
node
, s, 0);
end
a
node
← argmax
a
node
∈o
node
.c
a
node
.µ;
return a
node
.a;
Algorithm 2: Search.
Data: s, d
Result: Cumulative reward from the rollout
if terminal(s) or γ
d
< ε then
return 0;
end
a ∼ π
random
(s);
s
′
, z, r ∼Generator(s, a);
return r + γ· Rollout(s
′
, d + 1);
Algorithm 3: Rollout.
the deterministic part) and then to a sub-bucket (by
previous hash functions). If there are too many de-
terministic states to allow a bucket for each position,
similar positions can be grouped into shared buckets.
4.2 Backpropagation
The approach introduced in Czech et al. (2021) is
the most complete. We can backpropagate without
any extra overhead, in a true update-descent fash-
ion. Meanwhile, the extra overhead in tree traversal is
limited (and sometimes even compensated for when
search is cut off). All this while still dealing with the
information leak problem in an effective manner.
We apply these insights to POMDPS in our newly
introduced BROPOP procedure, encoded in Algo-
rithms 1 through 5. The procedure starts from the
Search method (Algorithm 2). In BROPOP, we store
the average reward and visitation count per observa-
tion in each action node. They get updated during
backpropagation (Algorithm 4) along with the total
visitation count and overall average reward for the ac-
tion node. We also store an average reward in the
observation nodes from now on. The information
leak between an action node and its child (transposi-
tion) observation node can now be calculated (Algo-
rithm 5). This is done by subtracting the correspond-
ing observation average reward in the action node
from the average reward in the observation node. The
calculation is valid because the visitation count for the
observation node is either equal to or greater than that
Data: trajectory, rewards
Result: Updated MCTS tree
Initialization: R ← 0, µ
target
← nothing;
o
node2
← pop(trajectory);
while trajectory is not empty do
r ← pop(rewards);
a
node
← pop(trajectory);
o
node
← pop(trajectory);
if µ
target
is not nothing then
µ
δ
← µ
target
−a
node
.µ.o
node2
;
µ
φ
← a
node
.n.o
node2
·µ
δ
+ o
node2
.µ;
µ
φ
← max(µ
min
, min(µ
φ
, µ
max
));
R ← µ
φ
;
end
R ← r + γR;
o
node
.n ← o
node
.n + 1;
a
node
.n ← a
node
.n + 1;
a
node
.µ ← a
node
.µ +
R−a
node
.µ
a
node
.n
;
o
node
.µ ← o
node
.µ +
R−o
node
.µ
o
node
.n
;
R
ao
←
R−a
node
.R
B
γ
;
a
node
.n.o
node2
← a
node
.n.o
node2
+ 1;
a
node
.µ.o
node2
←
a
node
.µ.o
node2
+
R
ao
−a
node
.µ.o
node2
a
node
.n.o
node2
;
o
node2
← o
node
;
if transposition(o
node
) then
µ
target
← o
node
.µ;
else
µ
target
← nothing;
end
end
Algorithm 4: Backpropagation.
of the corresponding observation in the action node.
When the information leak is greater than a certain
threshold, tree traversal is stopped and a correction
value is backpropagated. This in order to adjust the
average reward of the corresponding observation in
the action node to match that of the observation node.
The approach will decrease the number of simulations
and tree traversal steps needed. However, it only ad-
dresses information leaks when the problematic node
is first encountered. If the leak is severe enough to
prevent its selection, it will not be corrected. Never-
theless, this path should be visited by exploration in
normal circumstances.
During standard backpropagation (Algorithm 4),
whenever a transposition observation node is reached,
a similar process is performed. Instead of continu-
ing to backpropagate the current discounted accumu-
lated reward, a correction value is backpropagated in
the same manner, regardless of whether a threshold is
passed. All correction values in BROPOP are clipped
Belief Re-Use in Partially Observable Monte Carlo Tree Search
639

Data: o
node
, s, d
Result: One iteration
Initialization: trajectory ← [ ], rewards ← [ ];
while not (terminal(s) or γ
d
< ε or stop) do
if empty(o
node
.c) then
for a ∈A do
create a
node
;
a
node
.n ← 0;
a
node
.µ ← 0;
a
node
.a ← a;
a
node
.R
B
← get R
B
(a, o
node
);
push(o
node
.c, a
node
);
end
end
a
node
← argmax
a
node
∈o
node
.c
a
node
.µ +
c
q
ln(o
node
.n)
a
node
.n
;
s
′
, z, r ∼Generator(s, a
node
.a);
r ← a
node
.R
B
;
o
node2
← Get
o
node
(o
node
, a
node
, z);
if new(o
node2
) then
R ← Rollout(s
′
, d + 1);
r ← r + γR;
stop ← true;
else
if transposition(o
node2
) then
µ
δ
← o
node2
.µ −a
node
.µ.o
node2
;
if |µ
δ
| > µ
ε
then
µ
φ
←
a
node
.n.o
node2
·µ
δ
+ o
node2
.µ;
µ
φ
← max(µ
min
, min(µ
φ
,
µ
max
));
r ← r + γµ
φ
;
stop ← true;
end
end
end
push(trajectory, o
node
);
push(trajectory, a
node
);
push(rewards, r);
o
node
← o
node2
;
s ← s
′
;
d ← d + 1;
end
push(trajectory, o
node2
);
Backpropagation(trajectory, rewards);
Algorithm 5: Simulate.
between the minimum and maximum possible reward
in the tree, in order to still backpropagate realistic val-
ues that could actually exist.
4.3 Limitations
When there exists an action node pointing to a trans-
position observation node much deeper in the tree,
the backpropagated correction value may be signif-
icantly smaller than the reward that would be back-
propagated in a full rollout. That is because the cor-
rection is based on fewer accumulated rewards due to
the tree’s nearing maximum depth. Even in future it-
erations, when the algorithm progresses further into
the tree from that observation node, the backpropa-
gated correction value will still be limited by the cur-
rent average reward. This will slow down the con-
vergence to optimum. Generally, this does not pose
a big issue as in order for (observation) nodes to be
able to be merged together, their deterministic part of
the belief state should match (cf. Section 4.1.2). This
means that they likely have similar depths when being
merged together. Even when they are not at a similar
depth of the tree, it is highly unlikely that a large dis-
crepancy in accumulated rewards would occur. That
is because the amount of (reoccurring) accumulated
rewards is limited in most problems. Such a discrep-
ancy only occurs when a reoccurring immediate re-
ward is present in (almost) every time step, as is the
case for the Tag problem (cf. Section 5.1.3), where
a −1 penalty is given at each step. In real-world ap-
plications, recurring rewards are rarely essential and
can often be removed without altering the problem’s
objective. Thus, while this issue could arise, it is gen-
erally an unlikely concern in real-world problems.
5 EXPERIMENTS
We use POMCP (Silver and Veness, 2010) as base-
line, as implemented in Sunberg et al. (2024). The
experiments were all implemented and ran in the Ju-
lia programming language version 1.9.3. The system
on which these tests were ran has the following speci-
fications: Intel(R) Core(TM) i7-10510U CPU @ 2.30
GHz, RAM: 16,0 GB.
5.1 Problem Settings
The following subsections will each describe a bench-
mark problem used for our experiments. In Table 4,
one can find an overview.
5.1.1 RockSample
This POMDP problem was developed by Smith and
Simmons (2012) as a scalable benchmark. It models a
rover robot that operates on a square grid world tasked
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
640

Table 1: Data Summary: RockSample(5, 5).
Percentile Distance Measure
Reward Merges Time [s]
Mean StdDev Mean StdDev Mean StdDev
0 Euclidean 14.4 6.86 636.55 501.47 14.69 18.01
Hellinger 17.3 7.23 699.35 660.09 17.90 33.71
Jensen-Shannon 14.7 5.77 834.28 832.82 15.20 19.39
1 Euclidean 15.3 6.74 1386.63 1337.06 14.02 12.92
Hellinger 14.7 6.43 1048.75 979.02 11.50 10.52
Jensen-Shannon 16.0 7.78 1303.44 1598.90 15.63 23.50
2 Euclidean 15.5 7.83 1291.76 1059.06 11.25 10.67
Hellinger 16.5 6.87 1633.39 1324.11 10.27 5.38
Jensen-Shannon 16.8 6.80 1628.10 1415.46 9.79 5.40
3 Euclidean 14.0 6.96 1462.33 1210.54 9.87 11.17
Hellinger 17.7 7.23 1228.65 1114.52 16.23 33.03
Jensen-Shannon 16.6 8.31 1472.01 920.92 10.26 11.84
4 Euclidean 14.1 5.88 1020.32 1069.20 9.34 13.16
Hellinger 16.5 8.33 1282.70 987.50 10.46 10.57
Jensen-Shannon 18.3 8.53 1243.98 946.15 9.55 11.52
5 Euclidean 12.5 4.58 501.56 829.64 7.41 11.94
Hellinger 17.9 10.18 1559.18 1125.35 11.84 15.95
Jensen-Shannon 15.5 7.57 1263.04 948.64 9.51 9.33
6 Euclidean 13.7 6.30 515.96 736.72 5.84 5.11
Hellinger 17.8 7.73 1189.23 873.76 9.15 5.64
Jensen-Shannon 15.5 6.26 1182.24 1123.16 8.34 7.00
7 Euclidean 13.1 7.06 709.35 909.56 6.58 4.86
Hellinger 16.8 7.77 1247.31 888.33 8.45 4.30
Jensen-Shannon 18.0 7.39 977.93 903.55 9.42 5.20
8 Euclidean 12.7 5.66 358.35 385.31 10.51 36.08
Hellinger 18.4 6.62 1065.37 787.49 10.78 13.16
Jensen-Shannon 19.1 6.98 1300.58 993.94 10.94 6.13
/ POMCP 11.1 3.14 0.00 0.00 8.05 4.88
with sampling good rocks and ignoring bad rocks.
Rocks are randomly placed in the grid world. The
rover knows both its own position and the positions of
all the available rocks; it does not know which rocks
are considered good or bad. The rover is equipped
with a noisy long-range-sensor that can check a spe-
cific rock for its goodness. The accuracy of the sensor
decreases exponentially in proportion to the distance
between the rover and the rock. The problem is rep-
resented as RockSample(n, k), where n represents the
n ×n size of the world and k represents the number
of rocks. Finally, the initial belief state b
0
will take a
uniform distribution over the 2
k
different rock states.
5.1.2 DroneSurveillance
The DroneSurveillance problem was first introduced
by Svore
ˇ
nov
´
a et al. (2015) as a case study POMDP
problem. This problem takes place in a scalable grid
world, in which two agents move. One of these agents
is the ground agent, which moves according to a ran-
dom policy. The other agent is the quadrotor agent,
for which the most optimal actions have to be found.
The goal of the quadrotor agent is to reach region B in
the grid world, which will normally be at the farthest
corner from its starting point, region A. The quadro-
tor agent should avoid flying directly over the ground
agent, failing to do so will result in the quadrotor be-
ing brought down by the ground agent. The quadrotor
agent knows where it is in the grid world and also
knows where region B is. The quadrotor agent does
not know the start location of the ground agent, nor
how it will move. The quadrotor is equipped with a
camera that has a 3 ×3 view in the grid world which
can tell it something about the current position of the
ground agent; receiving observations in {SW , NW ,
NE, SE, DET , OUT }. When the agent is in between
two quadrants, both have equal chance of being ob-
served. The initial belief state b
0
is a uniform proba-
bility distribution over all states where the quadrotor
is in region A, and the ground agent is anywhere in
the grid world.
5.1.3 Tag
The Tag problem is one of the most famous and oldest
benchmark POMDP problems, introduced by Pineau
et al. (2003). It again takes place in a grid world, but
this time it is not scalable. The ego agent is tasked
with tagging an opponent agent. The opponent agent
will try to move away from the ego agent, in order to
not be tagged. It will do so according to a known tran-
Belief Re-Use in Partially Observable Monte Carlo Tree Search
641
Table 2: Data Summary: DroneSurveillance 6 ×6.
Percentile Distance Measure
Reward Merges Time [s]
Mean StdDev Mean StdDev Mean StdDev
0 Euclidean 0.73 0.66 553.76 206.69 10.90 11.24
Hellinger 0.71 0.69 551.15 239.43 11.79 16.30
Jensen-Shannon 0.74 0.65 584.38 219.07 12.76 13.46
1 Euclidean 0.74 0.66 1017.38 444.64 9.98 11.79
Hellinger 0.79 0.59 1129.51 449.09 9.45 8.70
Jensen-Shannon 0.74 0.66 1177.81 528.67 10.77 10.80
2 Euclidean 0.73 0.65 1130.94 421.20 7.15 4.54
Hellinger 0.76 0.64 1516.12 731.33 9.64 10.68
Jensen-Shannon 0.72 0.67 1543.84 820.04 9.87 10.57
3 Euclidean 0.57 0.81 1503.03 1006.62 10.57 13.21
Hellinger 0.71 0.66 1765.80 1002.62 9.44 9.28
Jensen-Shannon 0.79 0.61 1875.21 1003.81 10.09 9.21
4 Euclidean 0.76 0.61 1508.47 819.56 8.58 8.72
Hellinger 0.69 0.63 1945.28 1292.40 10.03 11.57
Jensen-Shannon 0.80 0.55 1963.36 1184.90 9.69 9.77
5 Euclidean 0.73 0.65 1770.65 1125.08 10.30 10.63
Hellinger 0.68 0.66 2059.16 1343.59 9.40 9.86
Jensen-Shannon 0.74 0.63 1879.44 1068.32 8.22 8.95
6 Euclidean 0.78 0.58 1682.38 938.67 8.52 7.55
Hellinger 0.52 0.80 2018.88 1382.13 8.44 8.44
Jensen-Shannon 0.65 0.70 2046.74 1338.09 8.54 9.07
7 Euclidean 0.62 0.68 1984.19 1396.34 11.17 11.75
Hellinger 0.74 0.63 2249.08 1294.57 8.86 7.16
Jensen-Shannon 0.65 0.67 2213.59 1479.14 8.90 8.95
8 Euclidean 0.67 0.67 1942.06 1293.89 10.07 11.29
Hellinger 0.68 0.66 2444.46 1598.71 9.90 9.95
Jensen-Shannon 0.61 0.74 2401.23 1594.02 9.16 8.73
/ POMCP 0.48 0.86 0.00 0.00 4.29 1.97
sition function, that the ego agent can/should exploit.
After each move, the ego agent will get as observation
either its current position or it will be informed that it
shares its position with the opponent. The ego agent
will also be penalized for each move it takes, resulting
in a reoccurring immediate reward. The total size of
the grid world is 29 cells. For this problem to work, it
requires a different rollout strategy: instead of the nor-
mal random strategy, it should automatically tag when
the sampled state in the rollout has both agents shar-
ing a position. This is also done in other works deal-
ing with POMCP algorithms for Tag (Somani et al.,
2013). Changing the rollout strategy in this way helps
guide the agent to more optimal parts of the tree. Fur-
thermore, one needs to use a larger exploration value
c. The initial belief state b
0
is a uniform probability
distribution over all possible states. Both agents start
at random positions.
5.2 Experimental Results
To compare different similarity distance measures
uniformly, we use percentiles. That is because the
different similarity distance measures each have their
own range and behavior, making it difficult to com-
pare them for different thresholds. Percentiles are
calculated by first running a large amount (between
1000 and 10000 depending on the problem) of sim-
ulations, for each particular problem, and saving all
seen belief states in a list. This is followed by do-
ing a piece-wise comparison between all belief states
in the list, for the different similarity distance mea-
sures. The resulting distances are saved and sorted
by measure, enabling percentile-based thresholding.
For example, the 1st percentile corresponds to the dis-
tance at the index equal to 1% of the list’s length. All
zero distances are grouped at the zero percentile, with
percentiles counted from that point onward. To focus
on meaningful thresholds, we analyze only the first
eight percentiles plus the zero percentile. That is be-
cause higher percentiles lead to merging all observa-
tion nodes with the same determinism in their belief
state.
We run the experiments for the different similarity
distance measures and its corresponding percentiles
as thresholds for the merging. All algorithms use as
tree depth ε = 0.01. This in order to only stop the
search upon reaching a depth of which its immediate
reward will be discarded for 99% in the root when
backpropagating. The γ parameter is always set to
0.95.
Lastly, we evaluate how LSH can enhance this
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
642
Table 3: Data Summary: Tag (No BROPOP but normal backpropagation with merging).
Percentile Distance Measure
Reward Merges Time [s]
Mean StdDev Mean StdDev Mean StdDev
0 Euclidean −16.59 14.30 2658.45 1485.93 260.49 218.16
Hellinger −22.64 16.29 3240.55 1539.32 350.47 282.21
Jensen-Shannon −15.59 18.38 2442.27 1896.89 252.28 289.86
2 Euclidean −20.23 24.22 9759.14 12 776.80 411.96 535.99
Hellinger −34.95 33.19 16 323.00 14 948.60 690.89 646.92
Jensen-Shannon −26.64 28.86 13 264.40 13 263.10 468.42 500.56
4 Euclidean −46.64 32.45 26 658.50 18 161.00 867.95 607.82
Hellinger −43.36 33.76 21 387.00 14 359.00 684.41 522.43
Jensen-Shannon −39.95 32.86 22 070.10 16 410.90 682.25 553.26
6 Euclidean −42.95 33.45 19 834.10 13 644.50 541.12 427.20
Hellinger −48.82 31.89 23 382.40 13 708.30 627.46 466.13
Jensen-Shannon −48.27 32.65 24 269.60 15 721.30 715.28 534.02
/ POMCP −16.95 14.20 0.00 0.00 54.25 27.71
Table 4: POMDP benchmarks used are RockSample (RS),
DroneSurveillance (DS), and Tag. A problem is dynamic
when its environment changes during its execution without
that change being directly effected by the controlled agent.
Each problem has different state (|S|), action (|A|), and ob-
servation (|Z|) space sizes.
RS(5, 3) RS(5, 5) DS 4 ×4 DS 6 ×6 Tag
|S| 201 801 257 1297 841
|A| 8 10 5 5 5
|Z| 3 3 6 6 30
Dynamic - - ✓ ✓ ✓
process by testing one Hellinger distance percentile
with various LSH methods. The LSH implementa-
tions considered are the ones where we only look at
the known deterministic part of the belief state, to-
gether with the Hellinger LSH method for the differ-
ent r values. We exclude standalone distance mea-
sure based LSH methods due to poorer time perfor-
mance than the hybrid approach. Other similarity
distance measures are not tested, as they all use the
same LSH foundation, making their results compara-
ble. The chosen Hellinger percentile that we choose
to look at is usually the one that gave the largest end
reward. We always use 3 hash functions in the LSH
implementation.
5.2.1 Reward Performance
As one can see from the data summaries in Ta-
bles 1 and 2, the reward performance has a substan-
tial increase for almost all percentiles and distance
measures. The only exception is the Tag problem,
where we got better results by just using the nor-
mal update-descent backpropagation algorithm with
merging, that is, without information leak check (Ta-
ble 3). Using this approach has no significant im-
provement over the POMCP algorithm, but there is
a significant time increase. When a reoccurring im-
mediate reward gets applied in each step, the mea-
Table 5: Use of LSH for RockSample(5, 3).
r
Reward Merges Time [s]
Mean StdDev Mean StdDev Mean StdDev
Determ. 14.5 5.92 425.61 259.69 4.44 1.83
0.1 13.6 5.95 446.34 354.47 4.80 2.53
0.25 14.1 5.34 415.75 354.12 6.95 2.84
0.5 13.4 5.17 363.65 233.95 7.27 3.79
1.0 13.2 4.90 409.38 258.27 7.84 10.41
2.0 13.8 5.28 461.26 313.93 4.91 2.18
3.0 13.5 5.39 392.73 210.99 4.70 3.75
4.0 14.1 5.34 434.98 233.34 5.18 2.69
No LSH 14.8 5.41 350.69 202.40 4.48 1.53
POMCP 10.8 2.73 0.00 0.00 3.26 2.14
Table 6: Use of LSH for RockSample(5, 5).
r
Reward Merges Time [s]
Mean StdDev Mean StdDev Mean StdDev
Determ. 16.8 8.39 1184.24 952.87 7.19 5.09
0.1 15.2 7.97 1441.86 1699.43 9.67 15.61
0.25 15.2 6.43 1479.90 1319.85 10.29 17.19
0.5 15.7 7.42 1380.89 1091.52 11.51 17.09
1.0 15.1 6.59 1278.23 1208.60 7.57 5.21
2.0 16.2 8.85 1180.00 948.68 11.49 22.89
3.0 16.0 7.91 1091.36 861.77 10.31 17.84
4.0 15.8 7.94 1136.94 1035.22 11.42 22.48
No LSH 17.9 10.18 1559.18 1125.35 11.84 15.95
POMCP 11.1 3.14 0.00 0.00 8.05 4.88
sure for the information leak can become meaning-
less. This can result in backpropagating a wrong cor-
rection value (cf. Section 4.3). We also do not report
a data summary for the smaller versions of the other
two problems (RockSample(5, 3) and DroneSurveil-
lance 4 ×4) because they show similar results as the
bigger ones.
5.2.2 Time Performance by Using LSH
The previously observed improvement in reward per-
formance came at the expense of time performance,
which worsened. Luckily, by using appropriate LSH
methods, time performance became of the same or-
Belief Re-Use in Partially Observable Monte Carlo Tree Search
643
Table 7: Use of LSH for DroneSurveillance 4 ×4.
r
Reward Merges Time [s]
Mean StdDev Mean StdDev Mean StdDev
Determ. 0.74 0.68 1377.88 239.25 0.63 0.34
0.1 0.62 0.79 1235.85 306.26 0.69 0.17
0.25 0.66 0.76 1309.75 308.44 0.65 0.14
0.5 0.60 0.80 1277.00 374.09 0.63 0.17
1.0 0.58 0.82 1275.23 314.93 0.68 0.19
2.0 0.64 0.77 1301.74 307.01 0.64 0.14
3.0 0.70 0.72 1349.49 264.25 0.66 0.12
4.0 0.76 0.65 1396.62 240.28 0.69 0.11
No LSH 0.76 0.65 1403.10 349.22 1.29 0.38
POMCP 0.58 0.82 0.00 0.00 0.71 0.15
Table 8: Use of LSH for DroneSurveillance 6 ×6.
r
Reward Merges Time [s]
Mean StdDev Mean StdDev Mean StdDev
Determ. 0.72 0.55 1219.38 759.16 4.27 2.70
0.1 0.82 0.54 1080.70 453.83 4.49 1.89
0.25 0.75 0.64 1138.66 514.12 4.48 1.91
0.5 0.80 0.57 1118.07 462.85 4.67 4.02
1.0 0.66 0.68 1204.82 715.23 4.37 2.58
2.0 0.70 0.69 1176.98 631.21 4.66 2.50
3.0 0.64 0.75 1184.94 586.59 4.78 2.67
4.0 0.68 0.69 1175.61 625.81 4.52 3.65
No LSH 0.79 0.59 1129.51 449.09 9.45 8.70
POMCP 0.48 0.86 0.00 0.00 4.29 1.97
der as for the standard (POMCP) algorithm. All while
keeping the superior reward performance. For smaller
problems, only doing LSH by using the determinis-
tic part of the belief state increased time performance
the most. Further hybrid approaches made no im-
pact or even worsened performance. That is because
the extra steps in calculating and accessing the right
bucket outweigh the lower number of nodes in that
bucket. This can be seen in Table 5, here time per-
formance is worse than BROPOP without LSH when
using the further hybrid approaches. Even using only
the known deterministic part for LSH fails to increase
time performance, as the problem is by itself already
small and fast. For the larger version of this problem
in Table 6, we do see a substantial increase in time
performance. The performance becomes even better
than the normal POMCP algorithm when only using
the known deterministic part. Similar behavior can be
seen in Tables 7 and 8. Here, using the known deter-
ministic part makes time performance better than nor-
mal POMCP. In addition, further hybrid approaches
do not improve performance. For larger problems,
hybrid approaches do outperform the standalone ap-
proach. This can best be seen for the Tag problem in
Table 9. Here we compare the results when using a
standard backpropagation scheme and merging.
Table 9: Use of LSH for Tag.
r
Reward Merges Time [s]
Mean StdDev Mean StdDev Mean StdDev
Determ. -21.40 22.21 3160.39 2112.10 77.30 53.49
0.1 -23.75 18.48 3426.90 1882.03 78.44 43.25
0.25 -19.62 16.03 3014.21 1672.90 68.70 36.42
0.5 -19.34 15.26 3038.50 1641.73 71.37 37.12
1.0 -20.19 16.22 3138.35 1703.19 75.85 41.88
2.0 -18.79 17.75 2880.32 1728.97 71.32 43.76
3.0 -20.85 16.60 3144.94 1720.55 75.45 41.25
4.0 -17.46 16.95 2764.52 1749.12 65.86 41.07
No LSH -22.64 16.29 3240.55 1539.32 350.47 282.21
POMCP -16.95 14.20 0.00 0.00 54.25 27.71
6 CONCLUSION
We reported on our investigation into the re-use of
nodes in MCTS for POMDPs. To our knowledge,
this is the first effort in this direction applied to
MCTS for POMDPs. Node merging (re-use) cre-
ates transposition nodes, complicating backpropaga-
tion. To address this, we adapted Czech et al. (2021)’s
method of tracking information leakage to enforce
earlier search termination. Additionally, we explored
locality-sensitive hashing (LSH) methods to mini-
mize comparisons and speed up search.
Tests on five POMDP benchmarks showed posi-
tive results: the new backpropagation algorithm gen-
erally outperformed POMCP in returns. Using ap-
propriate LSH methods, termination times matched
POMCP’s while maintaining superior reward perfor-
mance.
In standard MCTS algorithms, subtrees of actions
not selected for execution are typically pruned from
the root. However, with the addition of transposition
nodes, this approach becomes infeasible. An action
node in the pruned part of the tree may point to an
observation node still used in the active part, prevent-
ing straightforward pruning. Another challenge with
pruning is that it might remove nodes that could later
merge with nodes in the active part, losing opportuni-
ties for re-use. Based on these considerations and pre-
liminary experimental results, we chose not to prune
in this work. Future research could focus on devel-
oping an effective pruning approach for transposition
nodes in POMDP MCTS trees. Finally, this work ad-
dresses discrete state spaces only. Extending this ap-
proach to continuous spaces would require particle fil-
tering and progressive widening techniques (Fischer
and Tas, 2020).
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
644

ACKNOWLEDGEMENTS
This research has also received funding from the KU
Leuven Research Funds (C14/24/092, iBOF/21/075),
and from the Flemish Government under the ”Onder-
zoeksprogramma Artifici
¨
ele Intelligentie (AI) Vlaan-
deren” programme.
REFERENCES
Browne, C. B., Powley, E., Whitehouse, D., Lucas, S. M.,
Cowling, P. I., Rohlfshagen, P., Tavener, S., Perez, D.,
Samothrakis, S., and Colton, S. (2012). A survey of
monte carlo tree search methods. IEEE Transactions on
Computational Intelligence and AI in games, 4(1):1–43.
Charikar, M. S. (2002). Similarity estimation techniques
from rounding algorithms. In Proceedings of the thiry-
fourth annual ACM symposium on Theory of computing,
pages 380–388.
Chen, L., Esfandiari, H., Fu, G., and Mirrokni, V. (2019).
Locality-sensitive hashing for f-divergences: Mutual in-
formation loss and beyond. Advances in Neural Informa-
tion Processing Systems, 32.
Choe, J. S. B. and Kim, J.-K. (2019). Enhancing monte
carlo tree search for playing hearthstone. In 2019 IEEE
conference on games (CoG), pages 1–7. IEEE.
Cohen, D. et al. (1997). Precalculus: A problems-oriented
approach. (No Title).
Czech, J., Korus, P., and Kersting, K. (2021). Improving al-
phazero using monte-carlo graph search. In Proceedings
of the International Conference on Automated Planning
and Scheduling, volume 31, pages 103–111.
Datar, M., Immorlica, N., Indyk, P., and Mirrokni, V. S.
(2004). Locality-sensitive hashing scheme based on p-
stable distributions. In Proceedings of the twentieth
annual symposium on Computational geometry, pages
253–262.
Fischer, J. and Tas,
¨
O. S. (2020). Information particle filter
tree: An online algorithm for pomdps with belief-based
rewards on continuous domains. In International Confer-
ence on Machine Learning, pages 3177–3187. PMLR.
Kaelbling, L. P., Littman, M. L., and Cassandra, A. R.
(1998). Planning and acting in partially observable
stochastic domains. Artificial intelligence, 101(1-2):99–
134.
Kullback, S. (1951). Kullback-leibler divergence.
Levine, J. (2017). Monte Carlo Tree Search. https://www.
youtube.com/watch?v=UXW2yZndl7U. [Accessed 19-
07-2024].
Mao, X.-L., Feng, B.-S., Hao, Y.-J., Nie, L., Huang, H., and
Wen, G. (2017). S2jsd-lsh: A locality-sensitive hash-
ing schema for probability distributions. In Proceedings
of the AAAI Conference on Artificial Intelligence, vol-
ume 31.
Mundhenk, M., Goldsmith, J., Lusena, C., and Allender,
E. (2000). Complexity of finite-horizon markov deci-
sion process problems. Journal of the ACM (JACM),
47(4):681–720.
Papadimitriou, C. H. and Tsitsiklis, J. N. (1987). The com-
plexity of markov decision processes. Mathematics of
operations research, 12(3):441–450.
Pineau, J., Gordon, G., Thrun, S., et al. (2003). Point-based
value iteration: An anytime algorithm for pomdps. In
Ijcai, volume 3, pages 1025–1032.
Saffidine, A., Cazenave, T., and M
´
ehat, J. (2012). Ucd: Up-
per confidence bound for rooted directed acyclic graphs.
Knowledge-Based Systems, 34:26–33.
Schrittwieser, J., Antonoglou, I., Hubert, T., Simonyan, K.,
Sifre, L., Schmitt, S., Guez, A., Lockhart, E., Hassabis,
D., Graepel, T., et al. (2020). Mastering atari, go, chess
and shogi by planning with a learned model. Nature,
588(7839):604–609.
Shlens, J. (2014). Notes on kullback-leibler divergence and
likelihood. arXiv preprint arXiv:1404.2000.
Silver, D. and Veness, J. (2010). Monte-carlo planning in
large pomdps. Advances in neural information process-
ing systems, 23.
Smallwood, J. E. and Sondik, E. J. (1973). The optimal
control of partially observable markov processes over a
finite horizon. Operations Research, 21(5):1071–1088.
Smith, T. and Simmons, R. (2012). Heuristic search value
iteration for pomdps. arXiv preprint arXiv:1207.4166.
Somani, A., Ye, N., Hsu, D., and Lee, W. S. (2013). Despot:
Online pomdp planning with regularization. Advances in
neural information processing systems, 26.
Sunberg, Z. et al. (2024). GitHub - Juli-
aPOMDP/BasicPOMCP.jl: The PO-UCT algorithm
(aka POMCP) implemented in Julia — github.com.
https://github.com/JuliaPOMDP/BasicPOMCP.jl. [Ac-
cessed 22-07-2024].
Svore
ˇ
nov
´
a, M., Chmel
´
ık, M., Leahy, K., Eniser, H. F., Chat-
terjee, K.,
ˇ
Cern
´
a, I., and Belta, C. (2015). Temporal logic
motion planning using pomdps with parity objectives:
Case study paper. In Proceedings of the 18th Interna-
tional Conference on Hybrid Systems: Computation and
Control, pages 233–238.
Belief Re-Use in Partially Observable Monte Carlo Tree Search
645
