
FlowAct: A Proactive Multimodal Human-Robot Interaction System
with Continuous Flow of Perception and Modular Action Sub-Systems
Timoth
´
ee Dhaussy, Bassam Jabaian and Fabrice Lef
`
evre
Laboratoire Informatique d’Avignon, Avignon University, France
Keywords:
HRI, Robotics, Multimodal Perceptions, Proactive.
Abstract:
The evolution of autonomous systems in the context of human-robot interaction systems requires a synergy
between the continuous perception of the environment and the potential actions to navigate or interact with it.
In this paper we present FlowAct, a proactive multimodal human-robot interaction architecture, working as an
asynchronous endless loop of robot sensors into actuators, and organized by two controllers, the Environment
State Tracking (EST) and the Action Planner. Through a series of real-world experiments, we exhibit the
efficacy of the system in maintaining a continuous perception-action loop, substantially enhancing the respon-
siveness and adaptability of autonomous pro-active agents. The modular architecture of the action subsystems
facilitates easy extensibility and adaptability to a broad spectrum of tasks and scenarios. The experiments
demonstrate the ability of a Pepper robot governed by FlowAct to intervene proactively in laboratory tests
and in the field in a hospital waiting room to offer participants various services (appointment management,
information, entertainment, etc.).
1 INTRODUCTION
Human-robot Interaction (HRI) has undergone a
transformative journey, evolving from basic, task-
oriented engagements to sophisticated, context-aware
interactions that mirror human-like dynamism (Grau
et al., 2021). As robots become an integral part of
our daily environments, there is a growing demand for
systems that can continuously perceive, comprehend,
and act within their surroundings in a way that is both
intuitive and adaptive (Chen et al., 2018). The con-
cept of continuous perception, where an autonomous
entity is perpetually sensing and interpreting its envi-
ronment, has become a fundamental pillar for mod-
ern HRI systems (Salomon, 1997). This is a depar-
ture from traditional systems that predominantly op-
erated in a reactive mode, responding to stimuli based
on preset algorithms or rules.
The compartmentalization of specific functionali-
ties into distinct modules, such as those for movement
or speech, has been recognized as a crucial advance
in the field (Tek
¨
ulve et al., 2019). This modular ap-
proach not only ensures that the system remains rele-
vant in various scenarios, but also facilitates the seam-
less integration of new functionalities and the opti-
mization of existing ones (Garrell et al., 2017).
In this paper, we present FlowAct, a proactive
multimodal system that exemplifies the fusion of con-
tinuous perception with action planning and moni-
toring. Anchored in the Environment State Tracker,
FlowAct offers a representation of its surroundings,
setting the stage for more informed and dynamic in-
teractions, which can be proactively triggered.
2 RELATED WORK
In the recent decades, interactive robots designed for
interacting with humans have found widespread ap-
plications across diverse sectors. They are increas-
ingly being used in service-oriented roles, such as
serving as waiters in restaurants (Gasteiger et al.,
2023), working as customer guides in shopping
malls (Kanda et al., 2009b), or assisting passengers
in train stations (Shiomi et al., 2011) to name a
few. Moreover, these systems have made significant
inroads into the healthcare sector (Barakova, 2011;
Diehl et al., 2014; Molina et al., 2018).
To build an HRI system, the architecture should
integrate various software components to facilitate
efficient and concurrent execution of multiple tasks.
These systems must possess key capabilities, in-
cluding recording historical events (Prescott et al.,
2019b), and constructing representations of others’
Dhaussy, T., Jabaian, B. and Lefèvre, F.
FlowAct: A Proactive Multimodal Human-Robot Interaction System with Continuous Flow of Perception and Modular Action Sub-Systems.
DOI: 10.5220/0013265700003905
In Proceedings of the 14th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2025), pages 771-779
ISBN: 978-989-758-730-6; ISSN: 2184-4313
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
771

actions, beliefs, desires, and intentions (McCann and
Bratman, 1991). In their paper, Moulin-Firer et
al. (Moulin-Frier et al., 2018) propose a cognitive
architecture organization based on Distributed Adap-
tive Control (DAC) (Verschure et al., 2003; Verschure
et al., 2014) that deals with the processing of states
of the world, or exteroception, the self, or intercep-
tion, and action. Furthermore, the RoboCog model
of the ADAPTA project (Romero-Garc
´
es et al., 2015)
enabled a sales robot to persuade potential customers
to approach a sales booth. This robot was capable
of identifying customers, gauging their willingness to
follow, and responding to specific queries.
The BRILLO (Rossi et al., 2022) architecture for
a bartender social robot follows a three-layer organi-
zation for its architecture: the execution layer, con-
text awareness and decision-making layer, and per-
cepts layer, all implemented within the Robot Op-
erating System (ROS), an efficient software with li-
braries and tools to build robot applications. Although
the architectures described above are specifically de-
signed and adapted to a particular application task,
they share a common processing structure with three
layers: the perception layer, the representation layer,
and the action layer. Our model was developed with
this foundational concept in mind. Nevertheless, it
was designed to be entirely task-independent, modu-
lar, and oriented towards process flow. Consequently,
the stream of multimodal perception-actions is con-
tinuously processed, facilitating proactive action de-
cisions through persistent monitoring of the perceived
environment.
3 FlowAct MODEL
3.1 Overview
In this section, the specific features of FlowAct, a sys-
tem designed to serve as a continuous conduit for sen-
sory inputs and their resulting actions, are introduced.
Four next sections provide a more precise insight into
the implementation of the FlowAct layers.
In FlowAct, the agent interacts with the world
by executing an infinite loop, with sensors providing
inputs and actuators delivering outputs. The cogni-
tive architecture comprises three stages: perceiving
the world through visual and audio sensors, repre-
senting the internal scene for the agent, and mak-
ing decisions of actions to act on the world (move,
speak, touch, etc.), as illustrated in Figure 1. As
such, this overall structure follows the standard loop
of cognitive architectures (perception, representation,
and action) (Moulin-Frier et al., 2018; Rossi et al.,
2022). Moreover, a modular approach is imple-
mented, wherein distinct modules are connected with
controllers that fulfill essential functions within the
architecture. This configuration facilitates the adap-
tation of modules to meet any particular cognitive re-
quirements. The information requisite and dissemi-
nated at each stage is transmitted via dedicated mem-
ory zones or blackboards (referred to as ”topics”),
rendering it accessible to all controllers and permit-
ting stringent regulation of production and consump-
tion conditions, such as creation and modification
timestamps, as well as access priority lists.
FlowAct separates the perception layer into two
sub-levels, ”raw perceptions” and ”refined percep-
tions”. The concept of raw perception refers to the
agent’s raw sensory data reflecting the quintet of hu-
man senses, especially auditory and visual, as well as
perceptions directly derived from these senses, such
as depth vision. These elementary perceptions are in-
tercepted by the ”perception refinement modules,” a
set in which raw data are distilled, producing an en-
hanced interpretative layer of the environment, called
”refined perceptions.”
The EST controller functions in a continuous way,
assimilating raw and refined perceptions to build a dy-
namic representation of the environment. It is also
tasked with memory management and can interface
with a database to store or retrieve specific knowl-
edge, helping to interpret the current state of the
world, such as the tracking of individuals or objects.
This controller employs various environmental mod-
ules, including the re-identification of individuals and
the allocation of perceptions, to update the scene anal-
ysis while taking into account its historical context.
The environment state is available to the Action
Planner controller, the strategic core of FlowAct. This
module is responsible for the analysis of environmen-
tal data and the planning of action strategies, inform-
ing the action modules asynchronously. It has the
unique ability to reflect on future actions while ex-
ecuting current actions. The action modules, acting
as the actuators of the system, transmit precise be-
havioral directives to the robotic agent, thus realizing
the transition from the environmental state to action
within this autonomous loop.
3.2 Robot Perceptions
Although the FlowAct architecture is not contingent
on a particular robotic platform, the experiments con-
ducted in this study employ Pepper, a robot devel-
oped by Softbank Robotics. Consequently, the imple-
mentation details provided will be based on this plat-
form, while maintaining general applicability. Pep-
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
772
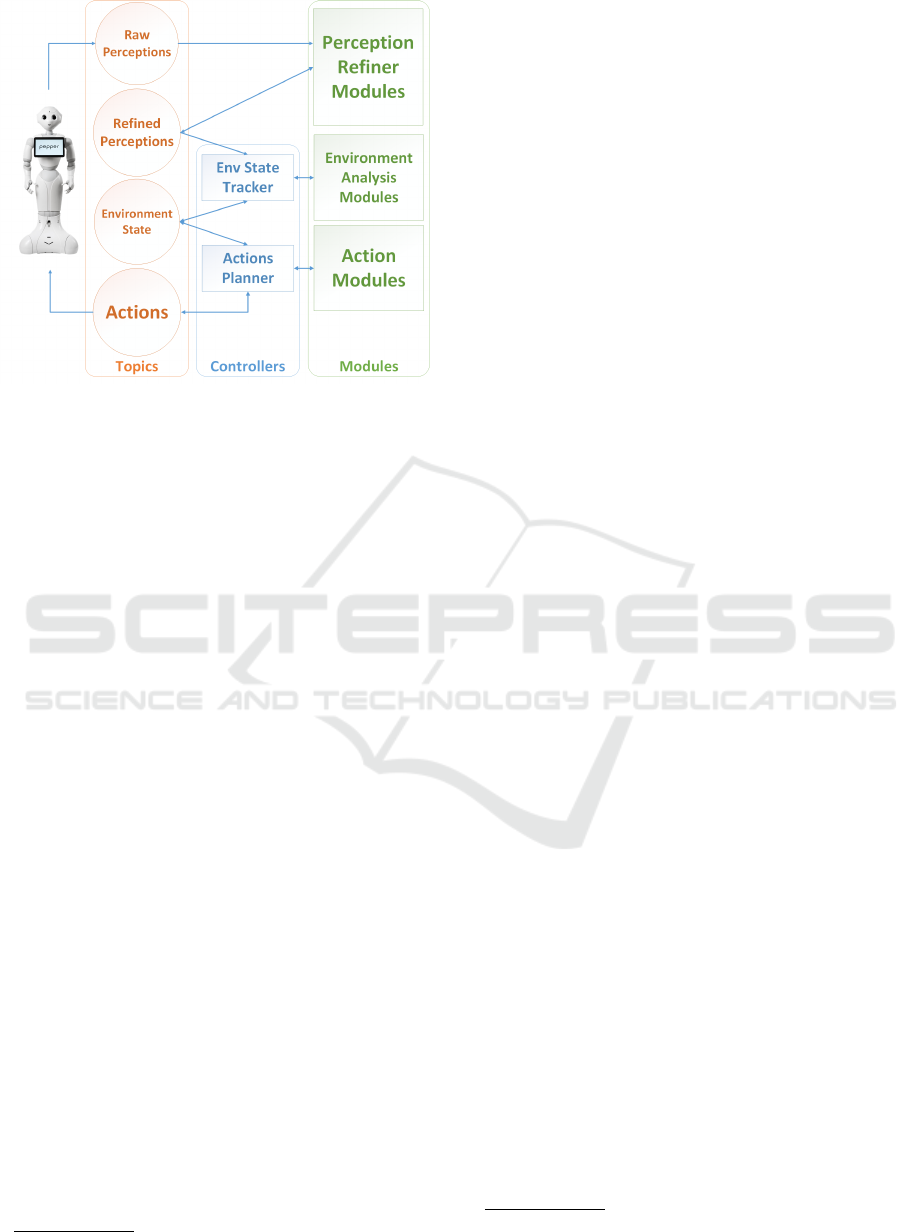
Figure 1: Overview of the FlowAct architecture, a continu-
ous perception/action loop.
per is equipped with an array of four microphones,
two loudspeakers, and three tactile sensors. Nonver-
bal communication is activated by LED clusters lo-
cated in the eyes, on the shoulders, and around the ear
speakers. Robot perception is aided by two 640x480
resolution cameras, strategically placed on the fore-
head and mouth, and an ASUS Xtion 3D sensor in one
eye, essential for localization and navigation. Given
its size, the forehead camera is ideal for HRI, aligned
with the average human body height. Pepper runs un-
der the NAOqi OS operating system, a GNU/Linux
distribution based on Gentoo. For our experiment,
NAOqi 2.5.5 is used, coupled with ROS
1
, so that the
perceptions received and sent by NAOqi pass through
topics (the message-passing framework implemented
within ROS). These initial sensory data collected by
the robot’s primary sensors are defined as ’raw per-
ceptions.’
3.3 Perception Refiner Modules
The FlowAct methodology encompasses the aug-
mentation of the principal raw perceptions acquired
by the agent, thereby facilitating the generation of a
comprehensive scene analysis. This is accomplished
through the implementation of perception refinement
modules. These modules systematically process
and enhance the initial dataset, resulting in a more
sophisticated and insightful collection of perceptions,
referred to as ’refined perceptions.’ Subsequently, the
refined perceptions are amalgamated with the raw
perceptions and transmitted to the environment state
tracker, which constructs a scene representation based
1
https://wiki.ros.org/
on this synthesized data. In our implementation, the
following modules are used:
• Voice Activity Detection: detects speech seg-
ments in raw data, based on an adaptive threshold
on energy of the sound signal.
• Person Tracker: combines the location of the
person and the extraction of body keypoint fea-
tures from an implementation of Yolov7 (Wang
et al., 2022) with a Deepsort algorithm (Wojke
et al., 2017) to track the identity of the people
present in the images captured by the camera.
• Gaze Tracker: uses the RT Gene’s ROS pack-
age (Fischer et al., 2018) which transforms the
image stream into various facial descriptors, gaze
orientation, head pose, and the position of key fa-
cial points.
• Speaker Diarization: is based on a temporal
audio-visual fusion model for multi-user speaker
diarization (Dhaussy et al., 2023b). The method
identifies dominant speakers and tracks them over
time by measuring the spatial coincidence be-
tween sound locations and visual presence.
• Interaction Acceptance Belief (IAB): infers the
level of IAB (Dhaussy et al., 2023a) which com-
monly answers the question ’What are the chances
of my interaction to be accepted by the targeted
user’ and is mainly based on the gaze of the user.
• Automatic Speech Recognition (ASR): based
on API calls sending the speech segments (de-
tected by the VAD module) to recognizers (such
as GoogleCloud speech recognition
2
or a local
OpenAI Whisper
3
whenever user’s privacy is at
stake).
3.4 Representation of the Environment
The EST controller is tasked with the construction
of an accurate temporal representation of the scene.
Consequently, it collects refined perceptual data,
maintains a historical record, orchestrates the flow of
perceptions, and delivers a comprehensive represen-
tation of the environment. Within this asynchronous
gathering of perceptions, it systematically aligns and
organizes these perceptions to synchronously deliver
its representation of the environment.
EST is therefore responsible for associative mem-
ory (Prescott et al., 2019a), a concept that defines
the ability to link two initially unrelated elements,
2
https://cloud.google.com/speech-to-text
3
https://github.com/openai/whisper
FlowAct: A Proactive Multimodal Human-Robot Interaction System with Continuous Flow of Perception and Modular Action Sub-Systems
773

such as a name and an unknown face. In this con-
text, we employ specific ”Environment analysis mod-
ules,” like person re-identification, which tracks users
in the scene, or perception assigner, tasked with link-
ing each detected user to a known or new identity.
In particular, in the task targeted in our experi-
ments (Section 4), the environment representation fo-
cuses on a single subject type: users detected within
images. Each user is associated with attributes such
as their IAB value, the number of times they have
been engaged, their corresponding utterances, and the
agent’s state. This latter includes information about
its spatial position, current and past actions, most re-
cent utterance, the user it is currently interacting with,
and its current state (observation, engaged, return to
its watchtower position, engaging user).
3.5 Decision Layer
The agent’s behavioral dynamics are orchestrated
through the synergistic operation of the Action Plan-
ner controller and a suite of Action modules. The Ac-
tion Planner serves as the cerebral core, permanently
rendering decisions to either stay put, initiate interac-
tion, return to a predefined (observation) position, or
continue the current interaction. Decisions are seam-
lessly transmitted to the Action modules, each de-
signed to spring into operation responsive to the delin-
eated behavior. Building upon the framework estab-
lished by Kanda et al. (Kanda et al., 2009a), we con-
ceptualize the outputs of the action planner as ’global
behavior’. To adhere to this global behavior, the ’local
behaviors’ are relayed via action modules. These lo-
cal behaviors are characterized by their more granular
and atomic nature. For example, the action ’continue
interaction’ implies the speaking module to answer
when it detects a user utterance. The engagement be-
havior in the tested system is governed by a series of
rules based on the level of the IAB model in the re-
fined perceptions, coupled with implicit engagement
requests from the user (a raised hand for instance).
The action planner frequency is 0.5Hz.
For our experimental setup, we have implemented
two pivotal Action modules:
Moving Module: capable of executing two distinct
actions. Firstly, it engages with a specified individ-
ual by aligning the robot’s orientation towards the tar-
get and proceeding to within 0.7 meters. Secondly,
it navigates the robot back to its initial observational
position. The system is equipped with internal states
that ensure the robot remains stationed at its standby
location and is engaged in a navigational sequence;
Speaking Module: This module regulates interaction
with users, initiating a conversational cycle once en-
gagement is achieved and the communication param-
eters are defined by the action modules. Responses
are generated through an API call to a large lan-
guage model (LLM), such as Vicuna
4
configured as
a conversational assistant, such as with the role-play
zero-shot setting (Njifenjou et al., 2024). Termination
of the conversation is dependent upon the identifica-
tion of specific keywords or user disengagement, in-
cluding a 10-second interval of non-response. Addi-
tionally, this module updates internal state indicators,
namely ’is speaking’ and ’in a conversation’, to reflect
active speech and participation by the robot, thereby
ensuring continuity in action planning decisions.
These modules collectively embody an agent’s
behavior as a sophisticated interaction of decision-
making processes, supported by a feedback mecha-
nism that enhances the agent’s environmental aware-
ness and adaptability progressively.
4 EXPERIMENTS
The experiments conducted to evaluate the implemen-
tation of FlowAct are executed in two distinct phases.
The initial phase involves a controlled experiment
within a laboratory setting, where individuals simu-
late the role of patients. This phase facilitates the test-
ing and refinement of the system’s functionalities, en-
abling the observation of interactions and responses
of the proactive social robot within a controlled en-
vironment. The subsequent phase is carried out in a
real-world setting, specifically within a hospital, in-
volving actual patients. This phase seeks to assess the
system under real-world conditions, considering un-
predictable variables and the diversity of human in-
teractions that may arise. This bifurcated approach
will not only technically validate the system but also
collect feedback on the user experience, ensuring the
robot’s capability to effectively perform its social role
in a hospital context. The modules are slightly mod-
ified between the laboratory experiment and the hos-
pital experiment to ensure the anonymity of hospital
patients; Google Speech-to-Text is replaced with the
local version of Whisper.
4.1 Laboratory Experiments
4.1.1 Scenario
To evaluate the effectiveness of the proposed model,
we implemented the proactive interaction loop within
a real-world setting, specifically designed to replicate
4
https://lmsys.org/blog/2023-03-30-vicuna/
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
774

Figure 2: Screenshot of a scene, with anonymised faces,
showing the IAB value for each person detected. Red box
indicates a person available for engagement.
a scenario where patients await their appointments in
a hospital waiting room. To emulate the role of pa-
tients for this investigation, a cohort of diverse partic-
ipants was enrolled, including 20 individuals, 14 men
and 6 women, all in the age range [22, 52]. Only 3 of
them were familiar with robotics.
The participants, which consisted mainly of aca-
demics and students from our institution, gave their
written consent to participate in this study. Further-
more, written informed consent was obtained from
individuals for the publication of any identifiable im-
ages or data that could be included in publications re-
lated to the experiment.
The participants were positioned in the vicinity of
the robotic entity (3-4 meters radius), either seated or
standing. Thereafter, they were instructed to adopt
one of the following behaviors, which are intended
to represent different levels of signals for proactive
engagement:
• Engage in dialogues with individuals seated adja-
cent to them;
• Engage in active utilization of mobile devices, for
instance, playing games or browsing the web;
• Exhibit a passive behavior, maintaining a stance
of idleness and portraying a waiting state devoid
of any particular engagement or activity;
• Display cues of interest and attentiveness towards
the robotic agent;
• Initiate interaction with the robotic agent by seek-
ing its attention or assistance, and requesting in-
formation, guidance, or support.
Upon concluding an interaction, the robot returns
to its observation position to initiate another engage-
ment. The participants are then instructed to resume
their designated scenarios, which may have been in-
terrupted during the interaction, once the robot reverts
to its original position. Participants were instructed to
speak only during their interaction with the agent or
when communicating with an individual seated next
to them as part of the scenario. Their speaking turn
during an interaction is indicated by an image dis-
played on the agent’s tablet.
Each scenario encompasses a blend of passive be-
havior towards the agent, along with active behaviors
such as showing interest or requesting interaction. A
scenario is considered complete either when a prede-
termined time limit is reached or after each participant
has been engaged by the robot.
4.1.2 Evaluation
To validate the functionality and usability of using
FlowAct for proactive robotic interaction, we per-
formed a thorough evaluation focusing on user experi-
ence to check the efficiency of the setup
5
. The experi-
ence is seen as a task in which the robot has to display
a proactive engagement behavior toward the humans
gathered in the room. The participants are informed
about the task of the robot and rate the questionnaire
accordingly to their posterior feelings.
The User Experience Questionnaire, as outlined
by Finstad’s (Finstad, 2010) study, was employed to
gauge users’ interactions with the system. Each ques-
tion represents a usability component evaluation of
the system. Following the order of the questionnaire,
we can measure effectiveness, satisfaction, overall
quality, and efficiency. The Usability Metric for User
Experience (UMUX), a concise and effective four-
item Likert scale, was utilized for the subjective eval-
uation of the application’s usability. This scale is
strategically crafted to yield insights comparable to
those derived from the more extensive 10-item sys-
tem usability scale (SUS), ensuring a thorough and
reliable assessment of user experience.
4.1.3 Laboratory Results
The average UMUX score of approximately 71 sug-
gests that, on a scale of 0 to 100, the overall usability
and user experience of the system being evaluated are
good. Regarding task performance, a significant ma-
jority of participants perceived the agent as effectively
fulfilling its intended role, as in the example shown in
Figure 2. The robot exhibited its ability to participate
in interactions within a hospital setting, demonstrat-
ing both reactive engagement in response to explicit
user cues and proactive engagement prompted by the
actor’s exhibited interest in the agent.
5
All data collected during these evaluations can be
made available for research purpose upon simple request
to the main author.
FlowAct: A Proactive Multimodal Human-Robot Interaction System with Continuous Flow of Perception and Modular Action Sub-Systems
775

Yet the general satisfaction with the system was
mixed. Although most of the participants did not
experience excessive frustration, notable instances of
frustration were primarily attributed to the response
latency of the agent, which typically ranged from 5
to 10 seconds. This delay was a consequence of the
computational demand for the LLM-based conversa-
tional agent. In particular, participants with previous
robotics experience expressed higher levels of frustra-
tion related to this latency.
In terms of usability, the consensus was that the
system was user-friendly and did not require specific
prerequisites for operation. During the experiments,
it was observed that the score of efficiency decreased
in situations where participants had to maintain eye
contact with the agent for longer than anticipated (of-
ten exceeding 10 seconds) or when they were required
to repeat themselves due to the robot’s inability to
comprehend their initial speech. In the course of
the conducted trials, each experiment was success-
fully executed, demonstrating engagement and inter-
action with each participant. In particular, in two in-
stances, the robot initiated interaction with individu-
als before they exhibited the reactive sign, typically a
raised hand signaling the agent. The users perceived
this preemptive interaction by the robot as proactive,
as it occurred in response to their demonstrated inter-
est prior to the conventional signal for engagement.
4.2 Hospital Experiments
4.2.1 Scenario and Evaluation
Subsequent to the laboratory experiments confirm-
ing operational performance, the experimental proce-
dures were implemented in a hospital setting over a
consecutive three-day period. A total of 11 patients
were involved, 4 men and 7 women, resulting in a
total of 13 recorded interactions. The mean age of
the participants was 75 years, with ages ranging from
52 to 89 years. Of these 11 individuals, seven had
prior experience interacting with robotic systems. All
procedures conducted within the hospital setting were
previously approved by the hospital’s ethics commit-
tee.
The scenario at the hospital slightly differs
from the laboratory setup. To evaluate system’s
usability and proper functioning of the observation-
engagement-interaction loop, participants were
asked, in turns, to first demonstrate interest in engag-
ing the robot. If the robot did not engage proactively,
participants were instructed to call it reactively (using
a hand signal, for instance). Each scene involved one
or two individuals positioned in front of the robot.
The evaluation setup for the hospital experiments
differs slightly. The experiments are carried out us-
ing the SUS questionnaire (Brooke, 1995), preferred
by our psychologist partners at the hospital. The SUS
questionnaire is used to evaluate the perceptions of
robot performance by participants in the context of in-
teraction. The SUS questionnaire, similar to the pre-
viously used UMUX questionnaire, is a standardized
tool that is used to assess the usability of a system. It
consists of ten statements rated on a five-point Likert
scale, ranging from ”Strongly Disagree” to ”Strongly
Agree.” This scale collects quantitative data on var-
ious aspects of the interaction, such as ease of use,
perceived complexity, user confidence, and the learn-
ing curve. The scores are then converted into an over-
all score out of 100, making it easier to compare and
interpret the results.
4.2.2 Hospital Results
Despite our efforts and due to factors beyond our con-
trol related to the hospital context, this sample is still
too small to draw firm conclusions from the collected
observations. However, within the framework of this
paper, it allows us to establish the operational context
of the study and its practical implementation. Even
though experimental sessions are needed to comple-
ment this very preliminary set, in the meantime, ana-
lyzing the current results may still offer some insights
into the system’s current state and the possibility of
some immediate improvements before further collect-
ing real-world interactions.
The average SUS score obtained from the evalua-
tion is 59, indicating a moderate level of usability. Ac-
cording to the SUS scoring framework, scores close to
51 are considered ”fair” or ”so-so”, while 71 are gen-
erally interpreted as ”good” (Bangor et al., 2009). A
score of 59, therefore, suggests that the system under
evaluation presents notable usability challenges. This
score implies that users may experience difficulties in
interacting with the system, potentially affecting over-
all user satisfaction and engagement.
The average duration of the interactions is 4
′
2”.
The responses to the first question about general ac-
ceptance show that users are not yet ready to use the
robot regularly. This is despite the fact that the per-
ceived complexity is relatively low (Q2) and the ease
of use is acknowledged (Q3). Patients feel capable
of using the robot independently, but they believe that
the integration of services could be improved. This
sentiment is understandable given the observed slow-
ness of the robot’s movements and the response la-
tency of the language module. Although inherent er-
rors of the LLMs were present, the participants did
not overly penalize inconsistencies in the dialogues
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
776

Figure 3: Example sequence of anonymised images showing patients’ engagements the the hospital.
(Q6). In general, participants find this human-robot
interaction system simple and effective in terms of us-
ability, capable of building trust with the patient, but
they are not inclined to use it or face it frequently.
4.3 Data Analysis
During the experiments, the detection of a high IAB
value was prioritized to ensure patient engagement.
However, if patients had difficulty engaging, they had
the option to raise their hand to signal their willing-
ness to engage. As a result, only 23% of the inter-
actions were initiated by detecting a high IAB value,
while the remaining 77% were initiated at the implicit
request of the patients, through a hand gesture.
One primary reason was a too long activation time
for the IAB (in laboratory settings IAB could take up
to 5s before activation) and so participants were prone
to display a reactive hand gesture signal immediately
after showing (unanswered) signs of interest, such as
gazing toward the agent. Also, hospital experiments
took place in 3 different locations, with highly vary-
ing lighting conditions. So it made the IAB prediction
more complex because the gaze orientation module,
which feeds into the main module, is rather sensitive
to light. Thus, after analyzing the data, we observed
that successful engagement using proper IAB detec-
tion worked only in less than half of the interactions.
Additionally, the person detection module was also
challenged, as face detection is also sensitive to light-
ing conditions. These observations highlight the lack
of robustness in the current IAB model.
Figure (3) illustrates a sequence of successive pa-
tient engagements. Following the image sequence
from left to right and top to bottom, we observe that
the patient on the right is not initially detected cor-
rectly, preventing any interaction at first. The robot
starts in observation mode, where it detects a signal
from the user to initiate engagement, in this case, a
hand gesture. Once the conversation begins, the robot
decides to continue until the dialogue module consid-
ers the conversation to be completed. The robot then
returns to observation mode, waiting for a new signal
to engage a patient in a new conversation. This pattern
of ’observation post, engagement detection, interac-
tion, return to observation post’ represents the stan-
dard loop for the proactive objective of the agent in a
hospital waiting room. Interestingly, the person in the
white coat in the background is correctly detected but
is not considered engageable in photos 2 and 3. This
is likely due to her behavior on her phone, which does
not mark her as a potential target. In the last photo, we
FlowAct: A Proactive Multimodal Human-Robot Interaction System with Continuous Flow of Perception and Modular Action Sub-Systems
777

Table 1: Example of a conversation patient-robot.
Speaker Dialogue turns
Patient Hello, I’m X, and you?
Pepper Hello, I am Pepper, the conversational robot of the hospital.
How can I help you today?
Patient I am too early for my appointment, what should I do while
I wait?
Pepper You are early for your appointment. You can take a mo-
ment to relax and wait for the medical staff to take you to
the consultation rooms at the scheduled time. This may
take between 5 minutes and half an hour, depending on the
number of consultations for the day.
Patient But how can I relax? What can I do to relax while I wait?
Pepper You can take a moment to relax while waiting for your con-
sultation by flipping through a book or listening to music.
The medical staff will take you to the consultation rooms at
the scheduled time.
Patient Can you play some music?
Pepper I can suggest playing music, but as a robot, I don’t have
access to a music system. Would you like me to talk to you
about music while you wait for your consultation?
Patient Sure.
Pepper How are you today?
observe that she moves closer to the engaged person
and is then detected as engageable by her IAB value,
which is consistent as she is directly looking at the
agent while assisting the user.
The dialogue in Table 1 is an example of a con-
versation between a patient and the agent. Pepper
demonstrates a good understanding of the user’s re-
quests and offers suggestions on how to pass the time
while waiting for a medical appointment. When the
user asks Pepper to play music, the robot explains
its technical limitations (lack of access to a music
system), but offers an alternative by suggesting they
could talk about music. This response shows that the
language model can handle technological limitations
while maintaining an engaging interaction. However,
it fails to follow up on the patient’s confirmation of
their desire to talk about music. This difficulty in
maintaining a coherent dialogue beyond a few ex-
changes indicates that improvements are needed in
how the chatbot handles conversation history. Despite
knowing all previous exchanges, it still struggles to
pursue a conversation to its logical conclusion.
During this trial, patient-robot conversations were
difficult due to the low volume and insufficient clarity
of the patients’ speech. Sometimes a simple repeti-
tion was enough, but often the transcriptions differed
significantly from the user’s actual utterance. This
complicated interactions with patients, highlighting
the need to improve the sound capture system for ef-
fective use with elderly individuals.
5 CONCLUSION
In summary, this research presents a system imple-
menting the FlowAct architecture, a preliminary ap-
proach in the field of continuous perception-action
systems within a robotic context for pro-active mul-
timodal HRI. Central to this study is the development
of a ROS architecture for a socially assistive robot, en-
gineered to provide efficient services while dynami-
cally and personally engaging users. The comprehen-
sive evaluation conducted in a controlled environment
not only validated the functionality of each module
but also the efficacy of the architecture as a whole.
Initial experimentation in simulated and real hospi-
tal settings has highlighted the system’s proficiency
in both proactive and responsive interactions with hu-
man participants. Some conditions, however, will re-
quire an improvement of some individual perception
and action modules to ensure greater public accep-
tance.
REFERENCES
Bangor, A., Kortum, P. T., and Miller, J. T. (2009). De-
termining what individual sus scores mean: adding
an adjective rating scale. Journal of Usability Stud-
ies archive, 4:114–123.
Barakova, E. I. (2011). Robots for social training of autistic
children. In 2011 World Congress on Information and
Communication Technologies, pages 14–19.
Brooke, J. (1995). Sus: A quick and dirty usability scale.
Usability Eval. Ind., 189.
Chen, M., Herrera, F., and Hwang, K. (2018). Cognitive
computing: Architecture, technologies and intelligent
applications. IEEE Access, 6:19774–19783.
Dhaussy, T., Jabaian, B., and Lef
`
evre, F. (2023a). Interac-
tion acceptance modelling and estimation for a proac-
tive engagement in the context of hri. In Proceedings
of the IEEE/CVF International Conference on Com-
puter Vision (ICCV) Workshops, pages 3069–3074.
Dhaussy, T., Jabaian, B., Lef
`
evre, F., and Horaud, R.
(2023b). Audio-visual speaker diarization in the
framework of multi-user hri. In ICASSP 2023 - 2023
IEEE International Conference on Acoustics, Speech
and Signal Processing (ICASSP), pages 1–5.
Diehl, J., Crowell, C., Villano, M., Wier, K., Tang, K., and
Riek, L. (2014). Clinical Applications of Robots in
Autism Spectrum Disorder Diagnosis and Treatment,
pages 411–422. Springer New York, New York, NY.
Finstad, K. (2010). The usability metric for user experience.
Interacting with Computers, 22:323–327.
Fischer, T., Chang, H. J., and Demiris, Y. (2018). Rt-
gene: Real-time eye gaze estimation in natural envi-
ronments. In Proceedings of the European Conference
on Computer Vision (ECCV).
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
778

Garrell, A., Villamizar, M., Moreno-Noguer, F., and San-
feliu, A. (2017). Teaching robot’s proactive behavior
using human assistance. International Journal of So-
cial Robotics, 9(2):231–249.
Gasteiger, N., Hellou, M., Lim, J. Y., MacDonald, B., and
Ahn, H. S. (2023). A theoretical approach to design-
ing interactive robots, using restaurant assistants as an
example. In 2023 20th International Conference on
Ubiquitous Robots (UR), pages 980–985.
Grau, A., Indri, M., Lo Bello, L., and Sauter, T. (2021).
Robots in industry: The past, present, and future of a
growing collaboration with humans. IEEE Industrial
Electronics Magazine, 15(1):50–61.
Kanda, T., Glas, D. F., Shiomi, M., and Hagita, N. (2009a).
Abstracting people’s trajectories for social robots to
proactively approach customers. IEEE Transactions
on Robotics, 25(6):1382–1396.
Kanda, T., Shiomi, M., Miyashita, Z., Ishiguro, H., and
Hagita, N. (2009b). An affective guide robot in a
shopping mall. In 4th ACM/IEEE Intl Conference on
Human-Robot Interaction (HRI), pages 173–180.
McCann, H. J. and Bratman, M. E. (1991). Intention, plans,
and practical reason. No
ˆ
us, 25(2):230.
Molina, J., Sierra Mar
´
ın, S., Munera, M., and Cifuentes G.,
C. (2018). Human robot interaction interface for a mo-
bility assistance device. In 1st International Seminar
on Rehabilitation and Assistive Robotics RAR2018.
Moulin-Frier, C., Fischer, T., Petit, M., Pointeau, G.,
Puigb
`
o, J.-Y., Pattacini, U., and ... (2018). Dac-h3: A
proactive robot cognitive architecture to acquire and
express knowledge about the world and the self. IEEE
Transactions on Cognitive and Developmental Sys-
tems, 10:1005–1022.
Njifenjou, A., Sucal, V., Jabaian, B., and Lef
`
evre, F. (2024).
Role-play zero-shot prompting with llms for open-
domain human-machine conversation.
Prescott, T., Camilleri, D., Martinez-Hernandez, U., Dami-
anou, A., and Lawrence, N. (2019a). Memory and
mental time travel in humans and social robots. Philo-
sophical Transactions B: Biological Sciences, 374.
Prescott, T. J., Camilleri, D., Martinez-Hernandez, U.,
Damianou, A., and Lawrence, N. D. (2019b). Mem-
ory and mental time travel in humans and social
robots. Philos. Trans. R. Soc. Lond. B Biol. Sci.,
374(1771):20180025.
Romero-Garc
´
es, A., Calderita, L. V., Mart
´
ınez-G
´
omez, J.,
Bandera, J. P., and Marfil, R. (2015). Testing a fully
autonomous robotic salesman in real scenarios. In
2015 IEEE International Conference on Autonomous
Robot Systems and Competitions, pages 124–130.
Rossi, A., Maro, M. D., Origlia, A., Palmiero, A., and
Rossi, S. (2022). A ros architecture for personalised
hri with a bartender social robot.
Salomon, R. (1997). Scaling behavior of the evolution strat-
egy when evolving neuronal control architectures for
autonomous agents. In Angeline, P. J., Reynolds,
R. G., McDonnell, J. R., and Eberhart, R., editors,
Evolutionary Programming VI, pages 47–57, Berlin,
Heidelberg. Springer Berlin Heidelberg.
Shiomi, M., Sakamoto, D., Kanda, T., Ishi, C. T., Ishiguro,
H., and Hagita, N. (2011). Field trial of a networked
robot at a train station. International Journal of Social
Robotics, 3(1):27–40.
Tek
¨
ulve, J., Fois, A., Sandamirskaya, Y., and Sch
¨
oner, G.
(2019). Autonomous sequence generation for a neu-
ral dynamic robot: Scene perception, serial order,
and object-oriented movement. Frontiers in Neuro-
robotics, 13.
Verschure, P. F. M. J., Pennartz, C. M. A., and Pezzulo,
G. (2014). The why, what, where, when and how
of goal-directed choice: neuronal and computational
principles. Philos. Trans. R. Soc. Lond. B Biol. Sci.,
369(1655):20130483.
Verschure, P. F. M. J., Voegtlin, T., and Douglas, R. J.
(2003). Environmentally mediated synergy between
perception and behaviour in mobile robots. Nature,
425(6958):620–624.
Wang, C.-Y., Bochkovskiy, A., and Liao, H.-Y. M. (2022).
Yolov7: Trainable bag-of-freebies sets new state-of-
the-art for real-time object detectors.
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple on-
line and realtime tracking with a deep association met-
ric.
FlowAct: A Proactive Multimodal Human-Robot Interaction System with Continuous Flow of Perception and Modular Action Sub-Systems
779
