Behaviour and Execution Semantics of Extended Sequence Edges in
Business Processes
Thomas Bauer
Hochschule Neu-Ulm, University of Applied Sciences, Wileystr. 1, 89231 Neu-Ulm, Germany
Keywords: Business Process, Flexibility, Control Flow, Sequence, Time, Workflow Engine.
Abstract: At business processes (BP), activities are usually considered as atomic units. This results in unnecessary re-
strictions, e.g. when modelling sequences of activities. Here, flexibility can be increased by allowing that a
sequence edge refers to the start and to the end events of their source and target activity arbitrarily. This allows
additional execution orders at the runtime of the BP, i.e. the end users have more flexibility at BP execution.
Nevertheless, we respect all modelled control flow conditions, as well as time constraints defined between
activities (e.g. minimum time intervals). A process engine requires a formal execution semantics, to be able
to control such a BP automatically. Therefore, in this paper, we develop corresponding execution rules. Fur-
thermore, we present measures that enable the process engine to delay and to speed up the start and the com-
pletion of activities in order to respect the modelled time constraints.
1 INTRODUCTION
The aim of our project CoPMoF (Controlable Pre-
Modeled Flexibility) is to increase the flexibility at
the execution of business processes (BP). However,
dynamic changes (Reichert and Weber, 2012) shall
not be used for this purpose. Instead, flexibility re-
quirements, that are expectable for a BP, are pre-mod-
elled already at build time. Later, at runtime, it is only
necessary to use (apply) this flexibility. This is much
easier for the end users and causes less effort. In ad-
dition, such flexibility is only available at process
points where it is desired in fact (i.e. intended and ap-
proved by the responsible person). The CoPMoF pro-
ject investigates which types of flexibility are usually
required and how they can be pre-modelled. This con-
cerns the control flow of BP (e.g. optional and alter-
native activities) (Bauer, 2024, 2021, 2020) as well as
other process perspectives (e.g. alternative actor as-
signments) (Bauer, 2019).
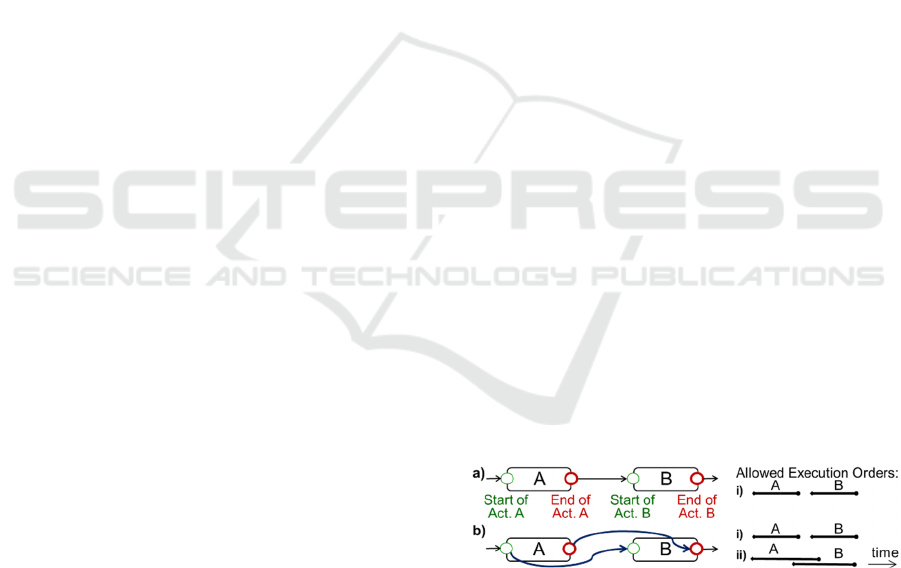
A possibility to increase flexibility is to extend the
capabilities of sequence edges: Normally, the activi-
ties of a BP are considered as atomic units at BP mod-
elling (Russell and Hofstede, 2006). Therefore, at a
sequence edge, the preceding Act. A must be com-
pleted before the succeeding Act. B can be started (cf.
Fig. 1a). In more detail, however, an activity consists
of a start event and an end event. This level of detail
is typically used for logging (i.e. writing the log file)
in process management systems (PMS). Furthermore,
such events are used at process mining (Dakic et al.,
2018; Zerbino et al., 2021). However, these events
usually cannot be used arbitrarily to model control
flow edges (Russell and Hofstede, 2006). Instead, se-
quence edges must always start from an end event of
an activity and must have a start event as target (cf.
Fig. 1a). This shall be extended so that they can start
and end at any event type (Fig. 1b). With the depicted
edges, the execution order ii) becomes possible, addi-
tionally. Furthermore, the approach presented in this
paper allows to define arbitrary temporal dependen-
cies between start and end events of activities.
Figure 1: 1a) Classic Sequence Edge b) Sequence Edges
with Extended Behaviour.
A BP for the development of electronic components
(e.g. of a vehicle) is used to explain how the addi-
tional edge types can be used (cf. Fig. 2a). From
Act. A to Act. B the classic sequence Edge was
modelled (edge type EndBeforeStart with the mean-
ing the end event of the preceding activity must occur
before the succeeding activity can be started.). In this
BP, after the design of the overall architecture
Bauer, T.
Behaviour and Execution Semantics of Extended Sequence Edges in Business Processes.
DOI: 10.5220/0013272200003929
In Proceedings of the 27th Inter national Conference on Enterprise Information Systems (ICEIS 2025) - Volume 2, pages 829-836
ISBN: 978-989-758-749-8; ISSN: 2184-4992
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
829

(Act. B), the control units are developed (Act. C). To
save development time (concurrent engineering),
however, these activities shall be performed in an
overlapping manner. For this reason, the type “Start-
BeforeStart” was used for the Edge . This means
that the execution of Act. B must start before the start
of Act. C. Therefore, Act. C can already be started af-
ter the start of Act. B, i.e. it does not have to wait for
its completion. The same applies to Act. D in relation
to Act. C (Edge ). However, because of Edge , it
is additionally defined that the test of the developed
control units can only be completed after their devel-
opment (Act. C) was completed. Finally, the Edge
specifies a maximum time for the execution of the
whole BP, because Act. D must be completed at least
120 days after the start of Act. A.
The additional edge types can also be used in
combination with more complex process structures as
Split- and Join-Nodes. The (condensed) BP for vehi-
cle delivery of Fig. 2b is used to explain the purpose
of such edges. Vehicle production is completed with
the final inspection (Act. A). Then, vehicle delivery
and invoicing take place in parallel: A vehicle, that
shall be delivered to a customer, is cleaned by the
truck driver in Act. B (e.g. removing any rubbish left
in the vehicle). This must be done before the transport
(Act. C) is completed since he is not able to clean the
vehicle afterwards. However, it is allowed that Act. B
and Act. C are performed in an overlapping manner,
e.g. by cleaning the vehicle during a transport break.
Therefore, the type EndBeforeEnd is used for
Edge . In addition, the vehicle transport (Act. C)
must start before Act. D (inform customer about de-
livery) starts (StartBeforeStart for Edge ). In the
case of an earlier notification, the risk of a misinfor-
mation would be too high, because before the vehicle
transport starts, there is still a high probability that the
transport will be cancelled (e.g. because the truck is
not available or is broken). Several edges with a new
edge type have an AND-Join (end of parallelism) as
target: Before the Act. F (handover to customer) can
be started, Act. C and Act. D must be completed (
and ). In addition, it is necessary that Act. E was at
least started (Edge ), i.e. an employee of the branch
was instructed to create the invoice. But, in order to
prevent that the customer has to wait unnecessarily,
then Act. F can be started already (e.g. with the ex-
planation of vehicle functions). However, this Act. F
can only be completed after the invoice has been
handed over. Since it must be created and printed be-
forehand, the completion of Act. F requires the com-
pletion of Act. E (EndBeforeEnd at Edge ).
Similar requirements are also known from project
management (Wysocki, 2019). There, sequence de-
pendencies can refer to any start and end events of
tasks, as well. This results in four possible combina-
tions: finish-to-start, finish-to-finish, start-to-start,
and start-to-finish (Wysocki, 2019). These corre-
spond to the four types of sequence edges of CoPMoF
(cf. Section 2.1). In addition, minimum and maxi-
mum time intervals between start and end events can
be defined at project management, as well. Their pur-
pose is to determine the critical path of a project, i.e.
the required execution time. In contrast, at CoPMoF,
the new edge types reduce the execution time of a BP
by enabling more parallelism at the execution of ac-
tivities. Of course, defined time constraints shall also
be respected. Similar orders, as enabled by the new
edge types we introduce with CoPMoF, are also de-
scribed in Allen's interval algebra (Allen, 1983) (e.g.
overlaps and during, cf. Fig. 3c).
(Bauer, 2023) presents examples of BP from prac-
tice, where extended sequence edges are useful. Fur-
thermore, the resulting requirements were explained.
However, until now, there exists no research that de-
velops a method that enables a PMS to control the ex-
ecution of corresponding BP (at runtime). This paper
handles this research gap: It describes how a PMS can
delay or speed up the start or end of activities. In ad-
dition, we develop an execution semantics for BP
with extended sequence edges and time conditions.
The latter is required by the PMS to determine activ-
ities, that are executable concerning the control flow,
and the associated points in time.
Figure 2: Example Processes with Extended Sequence Edges and a Time Edge.
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
830

In Section 2, relevant preliminary work from the
project CoPMoF is presented and the general state of
the art is discussed. Section 3 explains the behaviour
of the PMS at runtime. For this purpose, in particular,
a formal execution semantics is defined. The article
concludes with a summary and an outlook.
2 BASICS AND LITERATURE
This section presents preliminary work of our project
CoPMoF and the state of research and technology.
2.1 Preliminary Work
The basic idea of extended sequence edges is that they
can arbitrarily refer to the start and end events of their
source and target activities. We have already pub-
lished this idea in (Bauer, 2023). Furthermore, this
paper presents example scenarios where extended se-
quence edges are required. They are used to demon-
strate that (the already mentioned) four types of se-
quence edges, temporal constraints with minimum
and maximum durations, and the combination of
these are required, in practice.
However, the meaning of the four edge types was
defined only informally. Similar as in Fig. 3, for each
type, the possible execution orders were listed and the
intended behaviour was explained:
1. EndBeforeStart: The end of Act. A must happen
before the start of Act. B. This corresponds to a clas-
sic sequence edge, cf. (Russell and Hofstede, 2006).
2. EndBeforeEnd: The end of Act. A must happen
before the end of Act. B
3. StartBeforeStart: The start of Act. A must happen
before the start of Act. B
4. StartBeforeEnd: The start of Act. A must happen
before the end of Act. B
Figure 3: Types of Sequence Edges between Act. A and B.
The behaviour of the time constraints was described
only in text form, as well, since the meaning of a min-
imum or maximum time interval is obvious.
The process engine of a PMS requires an algo-
rithm to be able to control the execution of BP in-
stances. An explanation, that can only be understood
by humans, is not sufficient for this purpose. There-
fore, in this paper, we develop a formal execution se-
mantics (i.e. rules) for activity instances, that can be
used by such a process engine. These rules consider
the four types of sequence edges as well as minimum
and maximum time intervals between arbitrary start
and end events of activities.
2.2 Technology and Research
Commercial PMS are often based on standardized BP
modelling languages such as BPEL (OASIS, 2007)
and BPMN (OMG, 2011). These standards provide
sequence edges that allow only pure sequential orders
of activities (Type 1 in Section 2.1). An AND-Split
enables overlapping execution, but each execution or-
der is allowed for activities of different parallel
branches. There are no building blocks that realize the
behaviour of the Types 2 to 4 introduced in the previ-
ous section (e.g. StartBeforeStart).
In BPMN, maximum time intervals can be real-
ized by an intermediate timer event (OMG, 2011), ad-
ditional paths, and an escalation activity. This allows
to enforce maximum time intervals. However, such
an approach results in complex process graphs that
may be too confusing for “normal BP designers”.
(Russell and Hofstede, 2006) present control flow
patterns that enable many execution orders of activi-
ties. As mentioned above, activities are considered as
atomic units. Therefore, sequence edges cannot refer
to arbitrary start and end events of activities. Thus,
the Types 2 to 4 of Section 2.1 are not respected.
At case handling (Aalst et al., 2005), the state of
activity input data determines whether it can be
started. An actor can decide to start an activity as soon
as the required input data are available. (Hewelt and
Weske, 2016) extend such approaches by allowing to
model a lifecycle for data and to introduce own activ-
ity execution states. Both can be used to define when
an activity can be started, i.e. this is not defined by
control flow edges. With this approach, StartBefore-
Start dependencies (Type 3) can be realized.
Constraint-based approaches (Reichert and We-
ber, 2012) define the control flow with rules that re-
strict the allowed execution orders. Since these con-
straints refer to whole activities, dependencies of
Types 2 to 4 cannot be modelled here, as well.
Behaviour and Execution Semantics of Extended Sequence Edges in Business Processes
831
(Heinlein, 2001) enables the definition of arbi-
trary dependencies between the start and the end of
activities (including Types 2 to 4). However, this ap-
proach does not define dependencies between activi-
ties of the same process instance, but between activi-
ties of different process instances and even different
process templates. As such dependencies do not be-
long to a single process graph, they cannot be mod-
elled as (graphical) control flow edges. Instead, regu-
lar expressions are used for this purpose.
(Lanz et al., 2010) presents design patterns for de-
fining minimum and maximum time intervals be-
tween activities. They can arbitrarily refer to the start
and the end events of their predecessor and their suc-
cessor activity. Thus, all four edge types of Sec-
tion 2.1 are covered. However, the temporal con-
straints are not discussed in the context of control
flow edges and no execution semantics is presented.
3 BEHAVIOR AT RUNTIME
This section explains how a PMS can control BP in-
stances that contain the new types of edges. First, we
describe how the start or completion of activities can
be delayed or accelerated. Then, after defining some
basics, a formal execution semantics is presented.
3.1 Activity Start and end Times
If an activity shall not be started yet (e.g. due to a
minimum time interval in Case A2 of Fig. 4), it is not
inserted into the worklists of the users (as always at
PMS). If an activity can be started earlier (e.g. due to
a new type of sequence edge in Case B1), a corre-
sponding entry is created already. If the start of an ac-
tivity must happen earlier (Case B2), the PMS “en-
forces” this through escalations (Aalst et al., 2007).
Escalations were already used by many PMS today.
Thereby, messages were sent (automatically and
timely) to the potential actors, to their supervisors, or
to process administrators, in order to remind them of
the upcoming deadline. The timely completion of ac-
tivities (D2) can be “enforced” through escalations, as
well. If an activity must not be completed yet (C1 and
C2), for example, the “end button” of the correspond-
ing activity programme can be disabled (“greyed
out”). As this may confuse the user, additional infor-
mation should be displayed that explains why it is not
yet allowed to complete this activity.
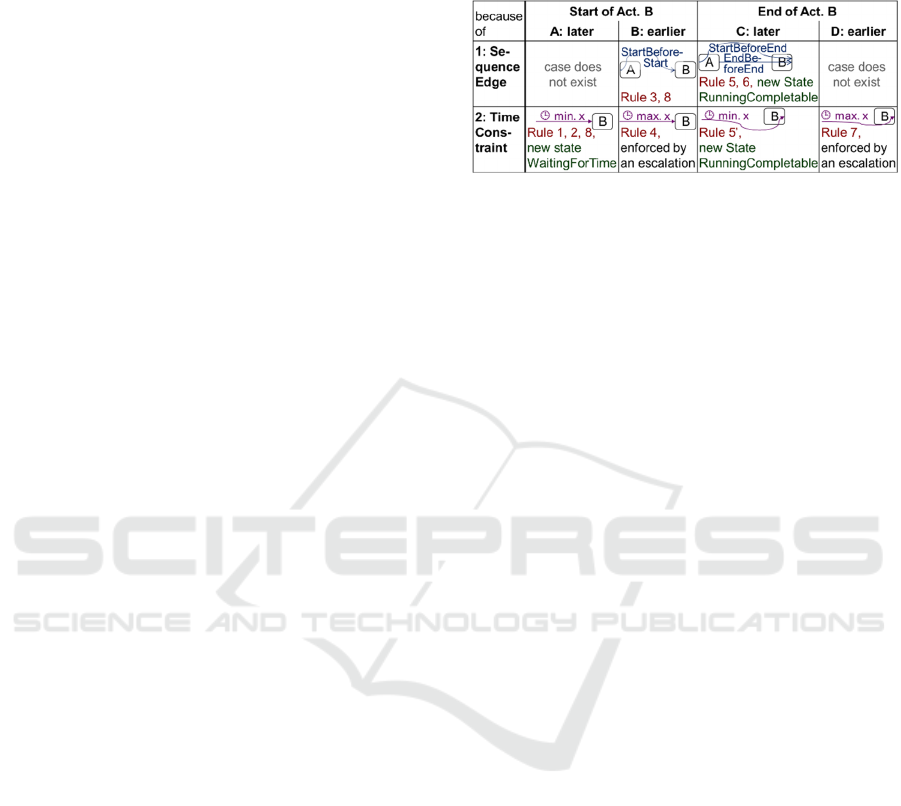
Fig. 4 contains cases where additional execution
rules are required for the process engine (e.g. Case
B1). These rules are explained in the following. To
improve readability, the numbers of these new rules
are shown in Fig. 4. For cases where an additional ex-
ecution state for activity instances becomes necessary
(A2 and C1/2), this is also depicted in Fig. 4:
Figure 4: Overview of the Cases.
3.2 Definitions
In the following, the usual definitions (OMG, 2011;
Reichert and Dadam, 1998; Weske, 2019) for BP and
execution states of activity instances are extended, so
that they can be used as a basis for developing execu-
tion rules for the new edge types.
Def. 1: Process template and instance, activity states:
A process template PT=(N, C, T) consists of a set of
nodes N, a set of control flow edges C, and a set of
time edges T.
A process instance PI=(PT, State) consists of a pro-
cess template PT and a set of activity states (State).
Each activity a∈N can have a different state State(a).
Activities can have the states shown in Fig. 6, i.e.
∀a∈N applies: State(a)∈{Inactive, WaitingForTime,
Active, Running, RunningCompletable, Completed}
The PMS knows the current state of each activity
and changes these states during the execution of the
process instance by using predefined execution rules.
This allows the PMS to control the execution order of
the activities, insert entries into worklists, start activ-
ity programs (e.g. forms), call automatically executed
services, etc.
Def. 2: A control flow edge c∈C is defined as
c = (SourceAct, TargetAct, Type) with:
SourceAct: the source activity of the edge
TargetAct: the target activity of the edge
Type: the type of edge with Type∈{StartBeforeStart,
StartBeforeEnd, EndBeforeStart, EndBeforeEnd}
In Def. 1, control flow and time edges are realized
as different types of edges. The reason for this sepa-
ration is that the existence of a time edge between two
activities does not always imply that there exists a se-
quence edge with the same type: In Fig. 5, the start of
Act. B must occur at latest (i.e. max.) 10 hours after
the end of Act. A (time edge with the classic type
EndBeforeStart). However, to speed up the BP exe-
cution, it is allowed that Act. B starts before the end
of Act. A, i.e. there is no control flow edge of this type
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
832

EndBeforeStart between these activities (but a control
flow edge with type StartBeforeStart, cf. Fig. 5).
Figure 5: Example for Activities Connected with a Time
Edge but not with a Control Flow Edge of the same Type.
Def. 3: A time edge t∈T is defined as t ={SourceAct,
TargetAct, Type, MinTime, MaxTime} with:
SourceAct, TargetAct, and Type: as defined in Def. 2
MinTime: the minimum time interval defined for this
edge
MaxTime: the maximum time interval defined for this
edge
For edges without a corresponding time constraint,
MinTime or MaxTime has the value undef.
To be able to use this information in the execution
rules, it can be accessed by functions with the same
name. For example, SourceAct(c) returns the source
activity of the edge c and State(a) returns the current
execution state of Act a.
To realize the new types of sequence edges, we
extend the set of states of an activity instance. The
two additionally required states are coloured in Fig. 6.
Furthermore, edges are labelled with the numbers of
the corresponding rules (cf. Sections 3.3 to 3.7) that
are required to realize the new edge types. Rules that
are already known from classical PMS (OMG, 2011;
Reichert and Dadam, 1998; Weske, 2019), are not re-
peated in the following. Therefore, Fig. 6 also con-
tains edges without labels.
Figure 6: State Transition Diagram for Activity Instances.
3.3 Delayed Activity Start
Sequence Edge: It is not possible that an Act. B be-
comes startable later because of a new sequence edge
type, than with classic edges: The only new type that
refers to the start of its target Act. B is StartBefore-
Start. With an edge of this type, e.g. from Act. A to
Act. B (Case B1 in Fig. 4), Act. B can be started ear-
lier than with the classic edge type EndBeforeStart.
Time Edge: An Act. B can become startable later be-
cause it is the target activity of a time edge with a pre-
defined minimum time (A2 in Fig. 4). Since the delay
concerns the start of this activity, the edge can have
the type EndBeforeStart or StartBeforeStart.
To enable the PMS to handle such time edges at
runtime, the additional activity state WaitingForTime
is required (cf. Fig. 6): The process engine “remem-
bers” the fact that the preceding activity of Act. B was
already completed, by leaving the start state Inactive
for Act. B. If only control flow edges were respected,
the Act. B would be startable now, i.e. with the “clas-
sic” execution rules its state would change to Active.
However, this is not yet allowed because of the mod-
elled time constraint. This is signalled by the new
state WaitingForTime. The classic execution rule is
modified in such a way that the state Inactive is not
directly followed by Active. Instead, the state changes
to WaitingForTime first:
Rule 1: The edge c∈C is a “normal” control flow
edge with the target activity a, i.e. TargetAct(c)=a ∧
Type(c)=EndBeforeStart.
After completion of the source activity s of this edge,
Act. a changes to the state WaitingForTime:
If the Act. s=SourceAct(c) reaches State(s)=Com-
pleted, then the state of Act. a changes to State(a)=
WaitingForTime.
The transition from this state WaitingForTime to
Active is performed by Rule 2, as soon as all the min-
imum waiting times of the incoming time edges have
been reached. Then, Act. a can be actually executed.
Rule 2: Let T
a
be the set of time edges that are rele-
vant for the calculation of the earliest start time of an
Act. a with State(a)=WaitingForTime:
T
a
= {t
i
∈T | TargetAct(t
i
)=a ∧ Type(t
i
)∈{StartBefore-
Start, EndBeforeStart} ∧ MinTime(t
i
)≠undef}
Then, the earliest start time of Act. a results as the
largest (i.e. latest) time, that results from one of these
edges: EarliestStartTime
a
=
Max(ResultingTime
Min,Start
(t
i
)) ∀t
i
∈ T
a
For this purpose, the time ResultingTime
Min,Start
(t) that
results for the edge t is calculated by adding the min-
imum time defined for this edge t to the start or the
end time (depending on the edge type) of the source
activity of edge t:
ResultingTime
Min,Start
(t
i
) =
StartTime(SourceAct(t
i
)) + MinTime(t
i
)
if Type(t
i
) = StartBeforeStart
EndTime(SourceAct(t
i
)) + MinTime(t
i
)
if Type(t
i
) = EndBeforeStart
As soon as the EarliestStartTime
a
is reached (i.e. Cur-
rentTime ≥ EarliestStartTime
a
), the state of Act. a is
changed to Active: State(a) = Active.
Remark: If there do not exist such time edges (i.e.
T
a
={}), the calculation of the maximum (Max) results
in EarliestStartTime
a
=-∞. Since CurrentTime ≥ -∞ al-
ways holds, Act. a changes directly to State(a)=Ac-
tive, as soon as State(a)=WaitingForTime is reached.
This means that the state WaitingForTime is then not
relevant since it is left immediately.
The following variants of ResultingTime are re-
quired by Rules 4, 5' and 7: ResultingTime
Max,Start
(t
i
)
is calculated as described in Rule 2, but MaxTime(t
i
)
Behaviour and Execution Semantics of Extended Sequence Edges in Business Processes
833

(instead of MinTime(t
i
)) is added. Furthermore, Re-
sultingTime
Min,End
(t
i
) and ResultingTime
Max,End
(t
i
) are
calculated in the same way, but T
a
contains the edges
t
i
with Type(t
i
)∈{StartBeforeEnd, EndBeforeEnd}.
3.4 Earlier Activity Start
Sequence Edge: An Act. B can become executable
because of an edge of the type StartBeforeStart (Case
B1 in Fig. 4). Similar as at a classic sequence edge
(i.e. type EndBeforeStart, cf. Rule 1), its state must
change from Inactive to WaitingForTime (not yet Ac-
tive as explained in Section 3.3). This is realized by
the following execution rule:
Rule 3: The Act. a with State(a)=Inactive is the target
of the control flow edge c∈C of type StartBeforeStart,
i.e. TargetAct(c)=a ∧ Type(c)=StartBeforeStart.
After the start of the source activity s of this edge, the
Act. a changes to the state WaitingForTime:
If the state of the activity s=SourceAct(c) changes to
State(s)=Running, then the state of Act. a is set to:
State(a)=WaitingForTime
Time Edge: If an Act. B has an incoming time edge
with a maximum time (B2 in Fig. 4), its start must be
enforced by escalations up to a certain point in time
(LatestStartTime
a
, see below). Thereby, only such
time edges are relevant that refer to the start of this
Act. B (i.e. types ...BeforeStart). The time Latest-
StartTime
a
is calculated as follows:
Rule 4: Let T
a
be the set of time edges relevant for
the calculation of the latest start time of Act. a:
T
a
= {t
i
∈T | TargetAct(t
i
)=a ∧ Type(t
i
)∈{StartBefore-
Start, EndBeforeStart} ∧ MaxTime(t
i
)≠undef}
Then, the latest start time of Act. a results as the
smallest (i.e. earliest) time, that results from one of
these edges: LatestStartTime
a
=
Min(ResultingTime
Max,Start
(t
i
)) ∀t
i
∈ T
a
As mentioned, this latest start time shall be en-
sured by escalations. Since some time may elapse af-
ter an escalation is triggered, before it is recognized
by the user and the activity is started in fact, the esca-
lation should be triggered timely before LatestStart-
Time
a
is reached. In some scenarios, in addition,
multi-level escalations (Aalst et al., 2007) can be use-
ful: For example, first an email is sent to the potential
actors of the activity. If the activity was not started
after a certain time, a responsible person (supervisor,
BP administrator) is informed. This must also be done
timely before LatestStartTime
a
is reached.
3.5 Delayed Activity Completion
Sequence Edge: The sequence edges shown in case
C1 of Fig. 4 (types ...BeforeEnd) can result in a de-
layed completion of their target B. That means, the
user may have already executed Act. B, but is not al-
lowed to finish it yet, because of such an edge. To
enable the process engine to recognize this case, we
introduce the new state RunningCompletable. During
its execution, Act. B initially has the state Running. It
can only be completed if its preceding Act. A, that is
connected with such an edge, has been started or com-
pleted. Then, the state of Act. B is changed to Run-
ningCompletable. Rule 5 realizes this state transition:
Rule 5: Let C
a
be the set of control flow edges that
are relevant for the completion of an Act. a with
State(a)=Running:
C
a
= {c
i
∈C | TargetAct(c
i
)=a ∧ Type(c
i
)∈{StartBe-
foreEnd, EndBeforeEnd}}
A state change for a is allowed as soon as all source
activities of these edges have been started (i) or fin-
ished (ii), i.e. all following conditions are fulfilled:
i) If ∀c
i
∈C
a
with Type(c
i
)=StartBeforeEnd applies:
State(SourceAct(c
i
)) ∈ {Running, RunningComplet-
able, Completed} and
ii) if ∀c
i
∈C
a
with Type(c
i
)=EndBeforeEnd applies:
State(SourceAct(c
i
)) = Completed,
then the state of Act. a is changed to:
State(a)=RunningCompletable
Remark: If there do not exist any control flow
edges of these types, whose target activity is Act. a
(i.e. C
a
={}), then the conditions i) and ii) are fulfilled.
Therefore, the state of Act. a changes to Running-
Completable immediately after Running is reached.
The following Rule 6 replaces the classic rule that
handles the completion of an activity. The main dif-
ference is that Rule 6 uses the (new) state Running-
Completable instead of the state Running.
Rule 6: If an Act. a has the state State(a)=Running-
Completable, the actor can complete this activity.
This results in a state change to: State(a)=Completed
If it is currently not allowed to complete an activ-
ity (i.e. it is still in the state Running instead of Run-
ningCompletable), this can be signalled to the actor,
for example, by deactivating the Ok / Complete but-
ton of the activity program or the corresponding entry
in the menu. Additionally, a help text (defined at build
time) shall be displayed, that explains why this activ-
ity cannot be finished yet. In order to enable such a
behaviour of the activity program, the interface (API)
of the PMS must provide functions to retrieve the
mentioned help text and to determine whether a par-
ticular activity can be terminated yet. The function for
the completion of an Act. a shall return an error if it
is already called at State(a)=Running.
Time Edge: Time edges with a predefined minimum
time also can delay the completion of the Act. B (cf.
C2 in Fig. 4). Here, these edges refer to the end of
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
834

Act. B, i.e. they have a type ...BeforeEnd. To respect
such edges, Rule 5 is extended by the additional con-
dition (iii), which must be fulfilled as well:
Rule 5': Let T
a
be the set of time edges with the target
activity a (with State(a)=Running) that are relevant
for the calculation of its earliest completion time:
T
a
= {t
i
∈T | TargetAct(t
i
)=a ∧ Type(t
i
)∈{StartBefore-
End, EndBeforeEnd} ∧ MinTime(t
i
)≠undef}
Then, the earliest completion time of Act. a results as:
EarliestCompletionTime
a
=
Max(ResultingTime
Min,End
(t
i
)) ∀ t
i
∈ T
a
iii) A state change for Act. a is allowed as soon as the
following condition is fulfilled:
CurrentTime ≥ EarliestCompletionTime
a
All conditions must be fulfilled to enable a state
change of Act. a, i.e. i) and ii) of Rule 5 as well as iii)
of Rule 5'. However, if no such time edges exist (i.e.
T
a
={}), the calculation of the maximum results in the
value -∞, again. Therefore, the ≥ condition for Cur-
rentTime is fulfilled, and thus also the condition iii).
The same Act. a can be the source and the target
activity of a time edge t
i
∈T
a
with type StartBefore-
End. This represents the important special case that a
minimum execution duration is defined for this
Act. a, e.g. the duration for an adhesive to dry. Rule 5'
respects this special case as well.
3.6 Earlier Activity Completion
Sequence Edge: It is not possible that an Act. a can
be completed earlier because of the new types of con-
trol flow edges, than at classic process models: At the
latter, the Act. a can be completed at any time after its
start. An earlier completion (i.e. before starting) does
not make sense. Therefore, the new types of control
flow edges cannot cause this case.
Time Edge: Time edges with a maximum time can
demand that an Act. B must be completed before a
certain point in time (cf. D2 in Fig. 4). These must be
edges that refer to the completion of Act. B (i.e. types
...BeforeEnd). Again, the PMS ensures timely com-
pletion through escalations. Rule 7 calculates the lat-
est possible point in time:
1
OR- and XOR-Join-Nodes have multiple incoming edges,
as well. For these, only those predecessor activities of the
Join-Node are relevant (i.e. are respected) that are located
in paths that are actually executed at this process instance.
Therefore, the sets S
End
and S
Start
shall not contain activities
from paths that are not executed.
2
In contrast to BPMN, Fig. 2b does not contain separate
gateway nodes (e.g. as in ADEPT (Reichert and Dadam,
1998)), because the execution of a gateway does not require
Rule 7: Let T
a
be the set of time edges that are rele-
vant for the calculation of the latest completion time
of Act. a:
T
a
= {t
i
∈T | TargetAct(t
i
)=a ∧ Type(t
i
)∈{StartBefore-
End, EndBeforeEnd} ∧ MaxTime(t
i
)≠undef}
Then the latest completion time LatestCompletion-
Time
a
of Act. a results as the smallest (i.e. earliest)
maximum completion time, that results from one of
these edges t
i
: LatestCompletionTime
a
= Min(ResultingTime
Max,End
(t
i
)) ∀ t
i
∈ T
a
3.7 Gateways
This section deals with process behaviour at gate-
ways, since the rules presented so far do not fully
cover this aspect. For activities that are located after
a Split-Node (e.g. Act. B, C, and E in Fig. 2b), no ex-
tensions are necessary, because such nodes have only
one preceding activity (e.g. the Split-Activity A in
Fig. 2b). Furthermore, the presented rules already
cover the cases of multiple incoming edges of the
types StartBeforeEnd and EndBeforeEnd (both by
Rule 5) as well as multiple incoming time edges
(Rules 2, 4, 5', and 7).
To improve readability, the case of multiple in-
coming sequence edges of the types EndBeforeStart
and StartBeforeStart was not respected by the Rules 1
and 3. This case occurs, for example, at an AND-Join
1
(cf. Act. F in Fig. 2b)
2
. Such an activity must wait for
several preceding activities. To enable this behaviour,
the Rules 1 and 3 are replaced by Rule 8 (shown be-
low). Here, the set S
End
contains all preceding activi-
ties that are connected with edges of the type EndBe-
foreStart and S
Start
activities connected with type
StartBeforeStart. Rule 8 respects that not only one
preceding Act. s (cf. Rules 1 and 3) must reach the
required state, but all activities of these two sets. In
the example of Fig. 2b, for Act. F the sets result as
S
End
={C, D} and S
Start
={E} (the latter because of
Edge ; the Edge is irrelevant for the startability
of Act. F).
Rule 8: Let C
End
be the set of “normal” control flow
edges with Act. a as target:
C
End
= {c
i
∈C | TargetAct(c
i
)=a ∧ Type(c
i
)=EndBe-
foreStart}
significant time. That means, its start and end events occur
almost simultaneously. Therefore, in our context, the addi-
tional gateway node and the additional edge would be irrel-
evant. (In Fig. 2b, using gateway nodes would result in an
AND-Join-Node with the incoming Edges ,, and an
additional outgoing edge to Act. F. The type (End- or Start-
BeforeStart) of this edge is irrelevant, because the start and
the end events of the gateway occur almost at the same
time.)
Behaviour and Execution Semantics of Extended Sequence Edges in Business Processes
835

Let C
Start
be the set of edges of type StartBeforeStart
and Act. a as target:
C
Start
= {c
i
∈C | TargetAct(c
i
)=a ∧ Type(c
i
)=StartBe-
foreStart}
After the completion of all source activities s∈S
End
connected to Act. a with edges of C
End
and after the
start (i.e. state is at least Running) of all activities
s∈S
Start
connected with edges of C
Start
, Act. a changes
to the state WaitingForTime:
If ∀s∈S
End
with S
End
= {s∈N | ∃ c
i
∈C
End
∧ s= Source-
Act(c
i
)} holds State(s)=Completed and
if ∀s∈S
Start
mit S
Start
= {s∈N | ∃ c
i
∈C
Start
∧ s= Source-
Act(c
i
)} holds State(s) ∈{Running, RunningCom-
pletable, Completed},
then the state of Act. a changes to:
State(a)=WaitingForTime
4 SUMMARY AND OUTLOOK
The presented approach extends sequence edges by
allowing that they use the start and the end events of
their source and target activities arbitrarily. Further-
more, minimum and maximum time intervals can be
defined, which can also refer to these events arbitrar-
ily. We explain how a PMS can influence users (e.g.
through escalations) in such a way that all these mod-
elled conditions are met. In addition, the formal exe-
cution semantics of process engines is extended by
introducing additionally required activity instance
states and by defining further execution rules. This
enables a PMS to automatically control BP that con-
tain edges of the new types.
The presented rules still have to be evaluated tech-
nically by a prototype implementation. For this pur-
pose, ideally, they will be integrated into an existing
PMS that can be used in practice. This would also al-
low an evaluation of their suitability for BP designers
and end users. However, due to the complexity of pro-
cess engines, such an integration can usually only be
realized by the vendor of the PMS. This is the long-
term goal, as it makes the described functionalities
available to many users. An integration into a BP
modelling tool for pure BP documentation and opti-
mization (e.g. as an extension of BPMN (Bauer,
2025)) would be less complex. Even this is useful be-
cause it enables BP modelling with more details (i.e.
advanced activity orders and time intervals). By ana-
lysing the resulting BP models, later on, it can be de-
termined how often the new edge types are required
in practice. High demand may motivate PMS vendors
to implement them in their process engines.
REFERENCES
Aalst, W.M.P. van der, Rosemann, M., Dumas, M., 2007.
Deadline-based Escalation in Process-Aware Infor-
mation Systems. Decision Support Systems 492–511.
Aalst, W.M.P. van der, Weske, M., Grünbauer, D., 2005.
Case Handling: A New Paradigm for Business Process
Support. Data & Knowledge Engineering 53, 129–162.
Allen, J.F., 1983. Maintaining Knowledge about Temporal
Intervals. Communications of the ACM 26, 832–843.
Bauer, T., 2025. Extending BPMN to Enable the Pre-Model-
ling of Flexibility for the Control Flow of Business Pro-
cesses, Proc. ICEIS25. Porto
Bauer, T., 2024. A Formal Execution Semantics for Sophis-
ticated Dynamic Jumps within Business Processes, Proc.
ICEIS24. Angers, 634–642.
Bauer, T., 2023. Modelling of Advanced Dependencies Be-
tween the Start and the End of Activities in Business Pro-
cesses. Proc. ICEIS23. Prague, 457–465.
Bauer, T., 2022. Requirements for Dynamic Jumps at the Ex-
ecution of Business Processes. Proc. 12th Int. Sympo-
sium on Business Modeling and Software Design.
Bauer, T., 2021. Pre-modelled Flexibility for the Control-
Flow of Business Processes, in: Enterprise Information
Systems. Springer, pp. 833–857.
Bauer, T., 2020. Business Processes with Pre-designed Flex-
ibility for the Control-Flow. Proc. ICEIS20, 631–642.
Bauer, T., 2019. Pre-modelled Flexibility for Business Pro-
cesses. Proc. ICEIS19. Heraklion, 547–555.
Dakic, D., Stefanovic, D., Cosic, I., Lolic, T., Medojevic, M.,
2018. Business Process Mining Application: A Literature
Review. Proc. 29th DAAAM Int. Symposium on Intelli-
gent Manufacturing and Automation 866–875.
Heinlein, C., 2001. Workflow and Process Synchronization
with Interaction Expressions and Graphs. Proc. 17th Int.
Conf. on Data Engineering 243–252.
Hewelt, M., Weske, M., 2016. A Hybrid Approach for Flex-
ible Case Modeling and Execution. Proc. 14th Int. Conf.
on Business Process Management 38–54.
Lanz, A., Weber, B., Reichert, M., 2010. Workflow Time
Patterns for Process-Aware Information Systems. Proc.
Enterprise, Business-Process, and Information 94–107.
OASIS, 2007. Web Services Business Process Execution
Language Version 2.0.
OMG, 2011. Business Process Model and Notation (BPMN)
2.0.
Reichert, M., Dadam, P., 1998. ADEPTflex - Supporting Dy-
namic Changes of Workflows Without Losing Control.
Journal of Intelligent Information Systems 10.
Reichert, M., Weber, B., 2012. Enabling Flexibility in Pro-
cess-Aware Information Systems. Springer.
Russell, N., Hofstede, A.H.M., 2006. Workflow Control-
Flow Patterns: A Revised View. BPM Center Report.
Weske, M., 2019. Business Process Management: Concepts,
Languages, Architectures, 3rd ed. Springer.
Wysocki, R.K., 2019. Effective Project Management. Wiley.
Zerbino, P., Stefanini, A., Aloini, D., 2021. Process Science
in Action. Technological Forecasting and Social Change
172.
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
836
