
Towards Human Posture Detection Based on Differential Measurements
Using Wearable Barometric Pressure Sensors
Nico Graum
¨
uller
1 a
, Constantin Gis
1
, Franziska Geiger
2 b
, Iman Soodmand
2 c
,
Maeruan Kebbach
2 d
, Rainer Bader
2
, Christian Haubelt
1 e
and Florian Gr
¨
utzmacher
1 f
1
Institute of Applied Microelectronics and Computer Engineering, University of Rostock, 18059 Rostock, Germany
2
Department of Orthopaedics, Rostock University Medical Center, 18057 Rostock, Germany
Keywords:
Posture Detection, Barometric Pressure Sensors, Wearable Sensors, Differential Height Measurements.
Abstract:
The detection of human postures is a well-studied research area that is closely related to human activity recog-
nition. Recent advantages of MEMS-based barometric pressure sensors have made them an interesting addi-
tional sensing modality apart from IMU-based approaches. State-of-the-art barometric pressure sensors allow
for measuring changes in barometric pressure corresponding to height differences in the range of centimeters.
However, they are susceptible to environmental pressure changes, which can significantly influence the appli-
cation. Therefore, we propose a posture detection approach based on differential height measurements from
multiple body-worn barometric pressure sensors. We conducted an initial laboratory study with 13 subjects
(eight males and four females), evaluating standing, sitting, and lying down postures using four body-worn
barometric pressure sensors positioned at the head, hip, wrist, and ankle. Our results demonstrate that only
two sensors are needed to separate the studied postures in the feature space. Furthermore, the differential
height measurement approach can compensate for environmental pressure influences to an insignificant level
w.r.t. posture separability in our setup. The efficacy of our proposed approach is further substantiated by the
observed separability of sitting on a bed and a chair for each subject individually.
1 INTRODUCTION
Barometric pressure sensors have found their way into
Human Activity Recognition (HAR) systems since
the 1990s (Manivannan et al., 2020). Due to their
ability to capture atmospheric pressure, which de-
creases with increasing altitude, they deliver valu-
able information on the altitude of a person when at-
tached or worn, e.g., in a smartwatch (Afram et al.,
2022). State-of-the-art Micro-Electro-Mechanical
Systems (MEMS) barometric pressure sensors, such
as the BMP581 from Bosch Sensortec (Bosch Sen-
sortec GmbH, 2024), can measure pressure changes
corresponding to height differences of a few cen-
timeters and are nowadays ubiquitous in devices like
smartphones or smartwatches. This makes them a
a
https://orcid.org/0009-0001-8914-3280
b
https://orcid.org/0009-0005-2473-6957
c
https://orcid.org/0000-0003-4919-5446
d
https://orcid.org/0000-0001-9564-7963
e
https://orcid.org/0000-0002-1568-5423
f
https://orcid.org/0000-0003-0370-222X
valuable option for enhancing HAR and smart health
monitoring systems in terms of detection accuracy. In
contrast to standard inertial measurement unit (IMU)-
based approaches, which are only able to detect rel-
ative movements or absolute orientations, barometric
pressure sensors are able to provide absolute height
information along the gravitational axis.
The present paper proposes human posture detec-
tion based on height differences between body parts
obtained from multiple body-worn barometric pres-
sure sensor measurements. This can be seen as a
first step towards the aforementioned improvement of
HAR systems, which we suspect will be especially
useful for distinguishing activities that share a similar
movement profile within IMU data but are performed
with different body postures.
Our paper is structured as follows: Section 2 ex-
plains related literature and how our contribution dif-
fers. Section 3 describes our proposed concept. Our
feasibility study is described in section 4 followed by
the evaluation of the acquired results in section 5. Fi-
nally, we discuss our findings in section 6 and present
conclusions in section 7.
1002
Graumüller, N., Gis, C., Geiger, F., Soodmand, I., Kebbach, M., Bader, R., Haubelt, C. and Grützmacher, F.
Towards Human Posture Detection Based on Differential Measurements Using Wearable Barometric Pressure Sensors.
DOI: 10.5220/0013273000003911
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 18th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2025) - Volume 1, pages 1002-1011
ISBN: 978-989-758-731-3; ISSN: 2184-4305
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

2 RELATED WORK
The related literature to our approach can be catego-
rized into three topics: general human posture detec-
tion approaches, IMU-based HAR and health moni-
toring approaches including barometric pressure sen-
sors, and applications based only on barometric pres-
sure sensors. In the following, the related literature
will be discussed in that order.
The predominant posture detection approach in
the literature is based on camera recordings. Many
different posture detection applications exist in this
field, such as human fall detection (Sun and Wang,
2020) or posture estimation for sports activities
(Nadeem et al., 2021). For a detailed overview, read-
ers are referred to the survey (Ma et al., 2022).
However, camera-based systems are usually more
expensive and require complex camera alignment and
optical markers, which can be hidden during pos-
tures or behind objects. This limits camera-based ap-
proaches to laboratory conditions making wearable
sensor-based posture detection an interesting alterna-
tive, which is practically not limited to stationary se-
tups.
While some existing approaches incorporate only
accelerometers to detect the tiltation of the human
body for posture estimation (Chopra et al., 2016) or
to infer the posture by multiple accelerometers (Wang
et al., 2016b), others combine them with additional
sensor modalities, e.g., electromyography sensors at-
tached to the upper limb in combination with ac-
celerometers to infer the upper body posture (Li et al.,
2021). Similar to our proposed approach, some other
studies suggest to infer body postures by distance
measures between wearable sensors. In (Vecchio
et al., 2017), ultra-wideband trackers have been used
to calculate distances, and in (Matsumoto and Takano,
2016), the Received Signal Strength Indicator (RSSI)
of Bluetooth Low Energy (BLE) beacons have been
used. The survey on wearable sensor-based human
motion and posture monitoring in (Huang et al., 2023)
shows that barometric pressure sensors play no signif-
icant role in existing posture detection approaches.
However, barometric pressure sensors have al-
ready been widely investigated for tracking human ac-
tivities. The work of Manivannan et al. (Manivannan
et al., 2020) provides a good overview of the research
topics and challenges regarding the usage of baromet-
ric pressure sensors for HAR. Many approaches pre-
sented in the literature fuse sensor data of barometric
sensors with other sensing modalities like IMUs.
Most common approaches make use of additional
barometric pressure sensors in order to detect if a per-
son is inside or outside of a building and its transitions
(Zhu et al., 2020) or different modes of vertical trans-
portation, e.g., riding an elevator (Liu et al., 2018),
climbing up and down (Nam and Park, 2013; Xu and
Qiu, 2021; Leuenberger et al., 2014), or floor local-
ization (Xu et al., 2017; Liu et al., 2014). This also
includes studies on vertical velocity and height infor-
mation (Sabatini and Genovese, 2014). The same idea
was also applied to activities that involve the vertical
displacements of the entire body, i.e., falling detection
(Bianchi et al., 2010; Wang et al., 2016a; Ejupi et al.,
2017b; Pierleoni et al., 2016).
In (Ejupi et al., 2017a), (Mass
´
e et al., 2016), (Xie
et al., 2018), and (Mass
´
e et al., 2015), a single baro-
metric pressure sensor in combination with IMU sen-
sors was used to classify sit-to-stand and stand-to-
sit transitions. While this can be categorized as a
posture change detection, the single sensor approach
lacks a reference and might lead to misclassifications,
especially when sitting or lying surfaces are at dif-
ferent heights or environmental disturbances through,
for example, opening or closing doors or windows
are present. In contrast, our approach uses multiple
barometric sensors for differential pressure evalua-
tion. This leads to the detection of relative height dif-
ferences, which helps to distinguish postures indepen-
dent of the altitude at which the postures are adopted
and allows the removal of disturbances common to all
pressure sensors. This compensation approach has al-
ready been suggested in (Audisio, 2024) for tracking
the body’s center of mass during human activities, al-
though it has not been implemented and tested yet.
Other studies that involve multiple barometric
pressure sensors for HAR classification are (Makma
et al., 2021) and (Moncada-Torres et al., 2014). While
in (Makma et al., 2021), the difference of a single
body-worn barometric pressure sensor to a stationary
wall-mounted reference sensor is utilized, (Moncada-
Torres et al., 2014) used the altitude changes relative
to the individual arithmetic mean of multiple body-
worn barometric pressure sensors. In contrast, our
approach utilizes the relative differences between all
body-worn barometric pressure sensors to cancel out
environmental influences affecting all sensors and in-
fer the adopted body posture.
Finally, examples of applications that use baro-
metric pressure sensors only include altimetry mea-
surement systems (Bolanakis, 2017b; Bolanakis,
2017a) and the detection of opening and clos-
ing events of doors inside a building (Wu et al.,
2015). Furthermore, in (Bollmeyer et al., 2013) and
(Bollmeyer et al., 2014), altitude information of a per-
son in medical applications is calculated based on dif-
ferential measurements. Again, only one body-worn
sensor is used together with a stationary reference
Towards Human Posture Detection Based on Differential Measurements Using Wearable Barometric Pressure Sensors
1003

measurement. In (Vanini et al., 2016), the barometric
pressure sensor of a smartphone is used to distinguish
between standing/walking on level ground and climb-
ing stairs, riding an elevator, and riding a cable car.
Ghimire et al. (Ghimire et al., 2016) studied the clas-
sification of motion states (resting, walking, riding an
elevator) using a single body-worn barometric pres-
sure sensor. Similarly, in (Mass
´
e et al., 2014), a single
trunk-worn barometric pressure sensor is used to dis-
tinguish standing and sitting activities. The most sim-
ilar approach regarding the measurement of differen-
tial pressure between multiple body-worn barometric
pressure sensors was proposed by Sun et al. in (Sun
et al., 2019). They used two body-worn barometric
pressure sensors to detect a person’s falling in differ-
ent scenarios by calculating the height information of
a waist-worn sensor to a reference sensor attached to
the shoes. Although they state that the reference sen-
sor can be mounted stationary or removed completely,
the detection accuracy may drop. This substantiates
the potential of our proposed approach to differential
barometric pressure measurements for detecting hu-
man postures, which can be seen as an extension of
the aforementioned approaches towards detecting hu-
man postures.
3 CONCEPT
As described earlier, our approach is based on multi-
ple barometric pressure sensors attached to different
body parts, which gives us the following advantages:
Differential Height Measurements: between the
sensors can be extracted from the minor relative
changes in barometric pressure due to different pos-
tures. Recent MEMS-based sensors enable us to mea-
sure pressure changes corresponding to a few cen-
timeters, which lies in the range needed to detect
height differences between body parts.
Compensation of Environmental Influences: will
be enabled due to the correlation of disturbances in all
accelerometers. Besides useful information regard-
ing the pressure on different body parts, the data also
contains disturbances induced by events in the envi-
ronment of the measurement setup. These could be
caused by opening or closing doors or windows in
the building or by barometric pressure changes due
to weather conditions like wind. We suspect that
these events influence the barometric pressure mea-
surements of all sensors similarly, enabling the elimi-
nation by considering only the height differences.
(a)
(b)
Figure 1: (a) Examined body postures standing, sitting, and
lying (b) Visualization of the placement of the four body-
worn sensors (red) at the head, wrist, hip, and ankle as well
as the reference sensor placed on the ground (blue). The
reference sensor is not involved in the posture detection but
is used to evaluate environmental influences in barometric
pressure. (Created in BioRender. Geiger, F. (2024) https:
//BioRender.com/f38h800).
Table 1: Execution sequence of the user study.
1. Standing 6. Sitting on a bed
2. Sitting on a chair 7. Lying down on a bed
3. Standing 8. Sitting on a bed
4. Lying down on a bed 9. Standing
5. Standing
4 EXPERIMENTS
4.1 User Study
The aim of the experiment is to assess how well a
person’s posture can be inferred from multiple body-
worn barometric pressure sensors. To this end, our
study was conducted under laboratory conditions,
minimizing additional environmental influences as
much as possible. Therefore, the experiments were
conducted in a computer lab on the second floor of a
4-floor building with an approximate area of 85 m
2
and a ceiling height of 3.30 m. The doors and win-
dows were kept closed during the experiments, and
the air conditioning was turned off to minimize envi-
ronmental influences on the barometric pressure. The
experiments were conducted from 10 am to 4 pm,
and the room temperature varied between 21.1
◦
C and
21.5
◦
C during the experiment.
The study involved 13 healthy subjects (eight
males and five females) with an average age of
BIOSIGNALS 2025 - 18th International Conference on Bio-inspired Systems and Signal Processing
1004

34.6±9.6 years. Ethical approval was granted by the
Ethics Committee of the Rostock University Medi-
cal Center, Germany (A 2024-0138). The average
body height was 181±13 cm, with the tallest subject
measuring 208 cm and the shortest subject measuring
161 cm. The subjects were instructed to follow a pre-
defined sequence of nine postures specified in Table
1, which involved standing, sitting on a chair, sitting
on a bed, and lying on a bed. In our setup, a field cot
served as the bed. The postures are displayed in Fig-
ure 1a. In order to capture execution variations of the
same subject, the sequence was repeated three times
per subject, and each posture was held for approxi-
mately 10 s. In the first trial, no specific instructions
were given on how to sit, stand, or lay down. For the
second and the third trial, the following instructions
were given to the subject:
• standing straight with hands hanging down beside
the body
• sitting straight with hands on the knees
• lying flat on the bed with the hands resting beside
the body
The chair and the field cot were placed close to each
other to minimize transition times. Measured from
the floor, the height of the chair was 48 cm, and the
height of the field cot was approximately 40 cm.
4.2 Hardware Setup
The hardware setup for our study consisted of four
wearable sensor nodes attached to the human body
and a single sensor node on a fixed location on the
floor within a perimeter of 2 m from the subject. The
latter was implemented to analyze environmental in-
fluences on the barometric pressure data unaffected
by the subject’s movement. Note that the pressure
data from the reference sensor is not required or used
for our posture detection, which permits mobile ap-
plications. As can be seen in Figure 1b, the sensors
were attached to the head, hip, wrist, and ankle using
hook-and-loop fasteners. Each sensor node consists
of a BMP581 barometric pressure sensor from Bosch
Sensortec GmbH, Reutlingen, Germany. The sensor
nodes attached to the hip and the head, as well as the
reference sensor on the floor (in the following referred
to as hub nodes), were additionally equipped with
a microcontroller board based on an nRF52832 mi-
crocontroller with integrated BLE chip from Nordic
Semiconductors. The sensor nodes at the ankle and
wrist were wired to the hub nodes at the hip and the
head, respectively. The hub nodes sampled the baro-
metric pressure sensors via I²C at a rate of 12 Hz and
sent the data wirelessly to a laptop via BLE. Each
barometric pressure sample was transmitted in an in-
dividual BLE packet. The Unix timestamp on the lap-
top at the arrival of each BLE packet was used as the
timestamp for each pressure sample.
To annotate the data with corresponding ground
truth labels, we marked the recorded postures by
implementing two recording states, switched via a
button press. The state (posture or transition) was
recorded together with the barometric pressure data
and their timestamps and was used to distinguish
between posture and transitions. Together with the
known execution sequence of postures, all posture
states were annotated with their corresponding label
in post-processing. It is important to note that the in-
structor first switched the recording state from posture
to transition before instructing the subject to change
to the next posture in the sequence and switched back
to the posture recording state after the subject took its
instructed position. This way, no transitions are con-
tained in the posture-labeled data.
4.3 Data Processing
Due to manufacturing tolerances, there are variations
in barometric pressure measurements between differ-
ent sensors, even when placed at the exact altitudes.
To compensate for these variations, we calibrated the
sensor nodes before each recording of a subject. Af-
terwards, the data was resampled by linear interpola-
tion, and the height differences were calculated.
4.3.1 Calibration
Before each subject’s trial, all sensor nodes were
placed on the ground, and a short sequence of pres-
sure values was collected. The mean pressure val-
ues over the recording were calculated for each sen-
sor, and the absolute differences to the ankle sensor
were calculated. This absolute difference was then
subtracted from the measured pressure sequences in
all other sensors to compensate for absolute pressure
offsets. This calibration between the sensors attached
to the body allows for posture detection independent
of any stationary sensors.
4.3.2 Height Differences
In order to calculate height differences between the
sensor nodes, first their absolute altitude w.r.t. sea
level has been calculated by the barometric formula
using equation (1), with subscript b denoting values
for the lowest atmospheric layer from 0-11,000 m
above sea level, P
b
being the static pressure at sea
level (here: P
b
= 1, 013.25 hPA), T
b
being the stan-
dard temperature at sea level (here: T
b
= 288.15 K),
Towards Human Posture Detection Based on Differential Measurements Using Wearable Barometric Pressure Sensors
1005

L
b
being the standard temperature lapse rate (here:
L
b
= 0.0065
K
m
), h
b
being the height at the bottom of
atmospheric layer (here: h
b
= 0 m), R the universal
gas constant (R = 8.3145
J
mol·K
), g
0
gravitational ac-
celeration (g
0
= 9.80665
m
s
2
), and M molar mass of air
(M = 0.0289644
kg
mol
).
h = h
b
+
T
b
L
b
·
1 −
P
P
b
−R·L
b
g
0
·M
(1)
From the absolute altitude values, height differences
between the individual sensor nodes have been calcu-
lated.
Since no additional synchronization between sen-
sor hub nodes was implemented, barometric pres-
sure data was sampled equidistantly but not necessar-
ily at the exact same time between different sensor
hub nodes. To calculate height differences at specific
timestamps, the absolute height measurements from
all sensors were resampled at a common time base
using linear interpolation between samples.
5 EVALUATION
The raw pressure values were calibrated to the ankle
sensor as described in section 4.3.1 and are displayed
in Figure 2 for trial 1 of subject 2. The sections high-
lighted in green mark the transition phases when the
subject changes between the postures. Each colored
line denotes one of the pressure sensor readings, and
the transparent numbers denote the execution order
according to Table 1. Note that the reference sen-
sor (purple) is only included for the visual analysis
of environmental pressure fluctuations. As this sen-
sor is stationary on the floor, the measured pressure
is expected to be constant during the trial. However,
throughout the trial, the graph shows larger bumps
from approximately 5-25 s, 45-55 s, and 110-135 s.
We assume this is caused by events in the building
that were outside of our control, e.g., opening/closing
doors or windows in other rooms or corridors. The
pressure changes due to posture changes, e.g., be-
tween phases 5, 6, and 7 (standing, sitting, and lying
down), are in the same order of magnitude, further
substantiating our motivation for using height differ-
ences between sensors for the classification. While
the observed disturbances significantly influence the
absolute pressure, the relative pressure differences be-
tween the sensors remain nearly the same.
Figure 3 is similar to Figure 2 except that each
colored line now represents the height differences be-
tween the sensors attached to subject 2 during trial 1.
It can be seen that the calculation of height differences
compensates external influences in barometric pres-
sure to the greatest extent (cf. Figure 2). This shows
that the external variations influence all attached sen-
sors similarly. Overall, minor fluctuations remain vis-
ible in all graphs, likely caused by the noise of the
sensors and insufficient sensor synchronization. Nev-
ertheless, these fluctuations are significantly smaller
than the differences in height caused by different pos-
tures.
Similarly to Figure 2, the postures can be visually
inferred from the graphs. As expected, the height dif-
ferences between head and ankle, wrist and ankle, and
hip and ankle decrease when transitioning from stand-
ing (phases 1, 3, and 5) to sitting (phases 2, 6, and 8)
and to lying down (phases 4 and 7). The height dif-
ference between head and hip and between head and
wrist remains nearly the same between standing and
sitting but decreases when lying down. In contrast,
the height difference between hip and wrist does not
substantially change between the postures. Interest-
ingly, minor differences are visible between phases 2
and 6, where the subject sat on the chair and the bed,
respectively. As the bed’s surface was lower than the
chair’s surface, the height difference between hip and
ankle and between head and ankle are less for sitting
on the bed (phases 6 and 8).
To select the most suitable sensors for posture
detection, the distributions of the height differences
between all body-worn sensors are depicted as his-
tograms in Figure 4. The x-axis marks the distance
calculated for the corresponding sensor combination,
the y-axis shows the number of occurrences in our
dataset, and the color denotes the corresponding pos-
tures: standing (blue), sitting (orange and green), and
lying down (red). Looking at the distribution of the
height difference between wrist and hip, a straightfor-
ward separation of the postures is impossible, as the
distributions for the different postures significantly
overlap. In contrast, the distributions of the height
differences between head and ankle and between hip
and ankle show a clear separation between the pos-
tures. This could allow for a simple classification us-
ing a threshold even without normalizing the sensor
height differences to the corresponding body height.
Similar to before, when looking at the difference in
height between head and ankle and between hip and
ankle, minor differences are visible between distribu-
tions for sitting on the chair and sitting on the bed, al-
though they have a significant overlap. The difference
between the distributions becomes even more evident
when looking at the subjects individually. This is an
interesting result as the height difference between the
chair and the bed was only 8 cm. However, we sus-
pect that discrimination in non-laboratory conditions,
BIOSIGNALS 2025 - 18th International Conference on Bio-inspired Systems and Signal Processing
1006
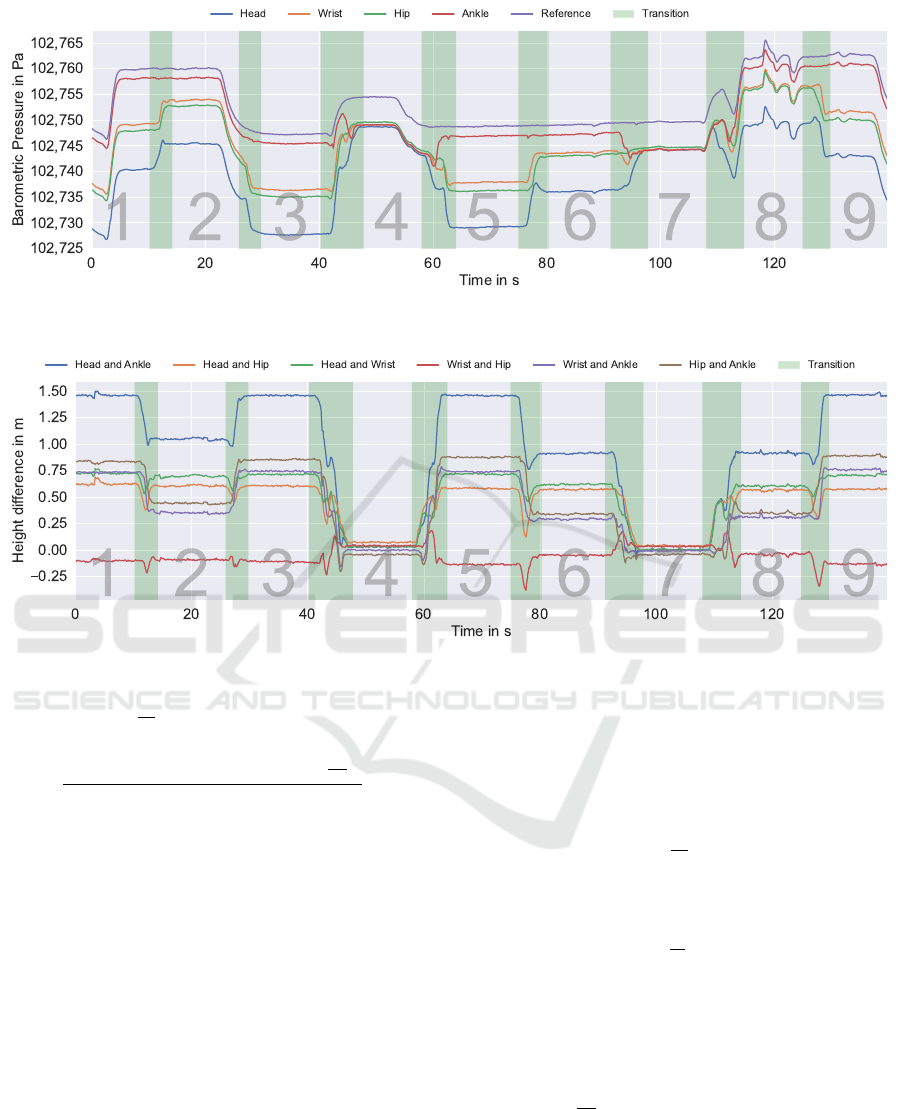
Figure 2: Pressure values calibrated to the ankle sensor for subject 2 in trial 1.
Figure 3: Height differences between the sensors calculated for subject 2 in trial 1.
Table 2: Values of
S
B
S
W
for each possible combination of sen-
sors.
Sensor Combination
S
B
S
W
Head and Ankle 2, 247 · 10
3
Head and Hip 386 · 10
3
Head and Wrist 478 · 10
3
Wrist and Hip 20 · 10
3
Wrist and Ankle 487 · 10
3
Hip and Ankle 495 · 10
3
where the subjects might sit differently (e.g., straight
vs. laid back), will be more difficult.
To determine a quantitative measure of posture
distinguishability, we utilized a metric that quantifies
the separability of data distributions, which is adopted
from multiclass linear discriminant analysis (Tharwat
et al., 2017). To this end, each posture (standing,
sitting, lying down) is considered a class. The vari-
ance between the classes S
B
and the variance within
the classes S
W
are calculated, and their ratio, which is
subject to maximization in linear discriminant analy-
sis, is used as a measure of separability. We calculated
S
B
and S
W
for the one-dimensional height differences
with the following equations, where X is the set of
samples x ∈ X, C is the set of classes c ∈ C, n
c
is the
number of samples belonging to c, N is the total num-
ber of samples N =
∑
c∈C
n
c
, µ
c
is the class mean of
all samples belonging to c with
µ
c
=
1
n
c
∑
j∈c
x
j
,
and µ is the mean of all samples
µ =
1
N
∑
x∈X
x .
S
B
=
∑
c∈C
n
c
(µ
c
− µ)
2
(2)
S
W
=
∑
c∈C
∑
j∈c
(x
j
− µ
c
)
2
(3)
We used
S
B
S
W
as a measure of separability between
the posture classes for each sensor combination. Note
that the measured height differences per subject were
normalized for the calculation by the overall height of
the corresponding subject to compensate for different
subject heights. The calculated values for all sensor
combinations are shown in Table 2.
Towards Human Posture Detection Based on Differential Measurements Using Wearable Barometric Pressure Sensors
1007
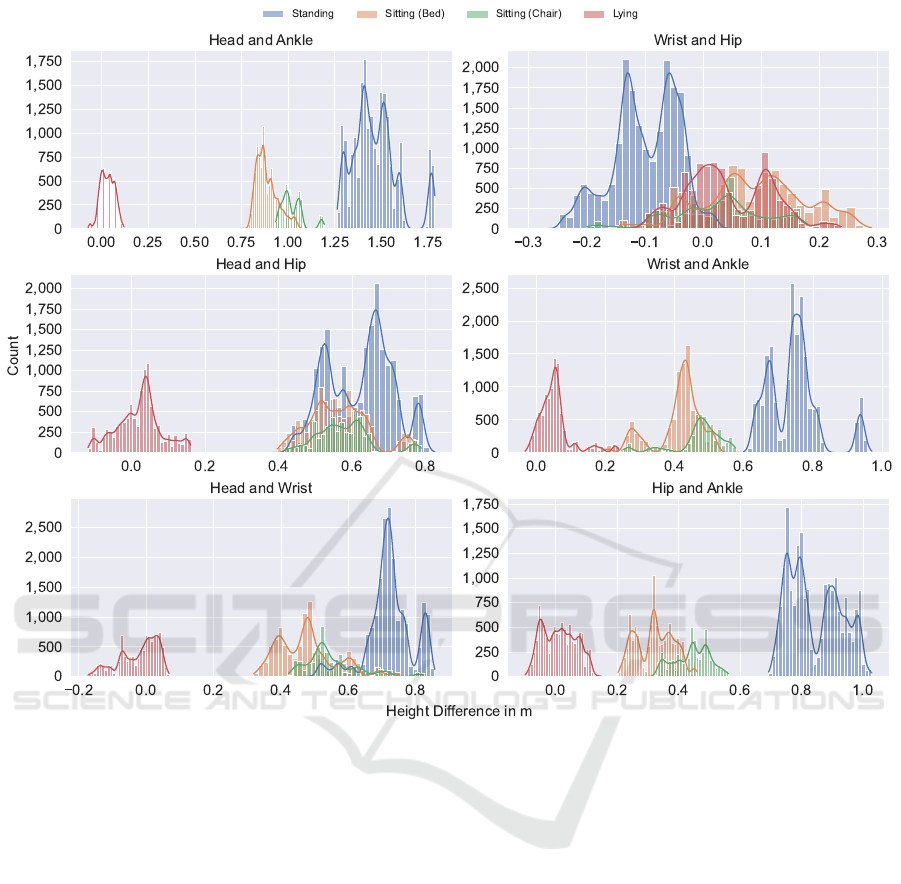
Figure 4: Distribution of postures over all height differences between the sensors.
As expected, the highest value is obtained for the
height difference between the head and the ankle. The
second highest value is obtained for the height dif-
ference between hip and ankle, although the height
difference between wrist and ankle and between head
and wrist have similar values. The lowest value was
obtained for the height difference between the wrist
and the hip, which aligns with our initial visual anal-
ysis. This supports our previous assumption that the
height differences between head and ankle and be-
tween hip and ankle are best suited for separating the
postures.
Figure 5 displays the distributions for each pos-
ture along the height difference between head and
ankle (x-axis) and between hip and ankle (y-axis)
in a two-dimensional feature space. Both differ-
ences were scaled per subject according to their body
height, which causes slightly more compact distri-
butions. Consistently with the previous results, the
posture classes standing (blue), sitting (orange and
green), and lying (red) are clearly separated in the
feature space, which suggests a simple classification
using predefined thresholds or simple algorithms like
decision trees or a k-nearest-neighbor. Looking at
the separability of sitting on a chair and sitting on a
bed, we can see differences in the centroids of the
two-dimensional distributions. Nevertheless, there is
a significant overlap between the two distributions,
which would lead to a certain amount of misclassifi-
cations. Similar to previous analyses, the examination
of the graphs for individual subjects indicates better
separation of the distributions between sitting on the
chair and the bed. Although we have scaled the height
differences with the body height, the overlaps could
be caused by variations due to the sensor placement
on the subjects and the movement of the sensor dur-
ing the experiments.
BIOSIGNALS 2025 - 18th International Conference on Bio-inspired Systems and Signal Processing
1008

Figure 5: Distribution of the postures over the height differ-
ences between head and ankle as well as hip and ankle.
6 DISCUSSION
Our work presents a feasibility study targeting human
posture detection using barometric pressure sensors.
The novelty lies in using the differential altitudes be-
tween multiple barometric pressure sensors, which
are all directly attached to the subject. However, our
feasibility study has several limitations which require
further investigation.
Firstly, only three distinct static postures were
evaluated. Deciding between more similar postures
will be more challenging, but our analysis showed dif-
ferences between sitting on the bed and the chair, in-
dicating the significant potential of our approach.
Secondly, our differential approach showed ro-
bustness against the air pressure disturbances present
in our laboratory data, consistent with earlier
studies on barometer-based indoor floor localiza-
tion (Liu et al., 2014) and indoor altitude estima-
tion (Bollmeyer et al., 2014). Nevertheless, the effects
of more severe environmental disturbances of the air
pressure, as expected in real-world scenarios, require
further investigation.
Another limitation of our study is the uncompen-
sated pressure drift of the barometric pressure sen-
sors and the simplistic time synchronization between
the sensors. While the recordings were relatively
short in our experiments, the effects mentioned above
might lead to inaccuracies during long-term moni-
toring, which needs additional compensation. More-
over, our feasibility study excluded the classification
of transitions between postures, which would require
more sophisticated algorithms and introduce addi-
tional challenges, e.g., due to overlaps in the tran-
sitions. Also, the selected postures were limited in
their execution variation, and postures during activ-
ities, e.g., upright posture in activities like walking
or running, were not considered. This could intro-
duce additional disturbances, such as local baromet-
ric pressure changes, due to air compression in front
of a person. The influence on the local barometric
pressure is currently unknown to us. Still, we suspect
that the differential height approach might also help to
compensate for this effect under the assumption that
all sensor nodes are equally affected by this.
The abovementioned limitations highlight that our
work presents the first results towards a robust pos-
ture detection approach using the height differences
measured with multiple body-worn barometric pres-
sure sensors. However, the observed separability be-
tween the examined postures and the observed com-
pensatory ability of differential measurements in our
experiments motivate further research in this direc-
tion. Furthermore, contrary to standard IMU sensors,
which are only able to detect relative movements or
absolute orientations, our approach is able to deliver
an absolute height difference along the gravitational
axis.
7 CONCLUSION
In the paper at hand, we propose a posture detection
approach based on differential height measurements
from wearable barometric pressure sensors. We eval-
uated our approach in an initial user study with 13
subjects under laboratory conditions, examining the
postures of standing, sitting, and lying down on a bed
with barometric pressure sensors attached to the head,
hip, wrist, and ankle of each subject. Our evaluation
showed that a combination of two sensors is sufficient
to discriminate all examined postures in our experi-
ment. Furthermore, the proposed differential height
measurement approach successfully compensated for
environmental influences on the barometric pressure
sufficiently in our study. The separability of each sub-
ject’s sitting posture at different surface heights fur-
ther substantiates our proposed posture detection ap-
proach. In future work, we will concentrate on en-
hancing the robustness of our approach w.r.t. envi-
ronmental influences in real-life scenarios, as well as
its potential application to health monitoring appli-
cations, e.g., the estimation of joint angles. Further-
more, the improvement in distinguishability of activ-
ities in HAR systems by accurate posture detection
using barometric pressure sensors remains to be eval-
uated.
Towards Human Posture Detection Based on Differential Measurements Using Wearable Barometric Pressure Sensors
1009

ACKNOWLEDGEMENTS
This work is partially funded by the German Sci-
ence Foundation (DFG) - SFB 1270/2 - 299150580.
Furthermore, we acknowledge financial support from
the department ”Aging of the Individual and Soci-
ety” (AGIS, German: Altern des Individuums und der
Gesellschaft) of the University of Rostock, Germany,
due to the special dividend for smart health projects.
Lastly, we thank Bosch Sensortec GmbH, Germany,
for providing the required sensor hardware.
INSTITUTIONAL REVIEW BOARD
STATEMENT
The study was conducted in accordance with the Dec-
laration of Helsinki and approved by the Ethics Com-
mittee of the Medical Faculty, University of Rostock
(registration number A 2024-0138).
REFERENCES
Afram, R. M., Abd Al-Muhsen, G. S., Ali, Y. H., Bashar,
A.-S., Ahmed, W. R., Ali, H. A., Jasim, A. A.,
Josephine, R., Muslim, A. M., and Ali, E. H. (2022).
Real-time motion up and down activity recognition
based on smart phone and smart watch sensors. In
2022 4th International Conference on Current Re-
search in Engineering and Science Applications (IC-
CRESA), pages 240–244. IEEE.
Audisio, A. (2024). Tracking the Body Center of Mass
during simulated daily activities: a sensor fusion ap-
proach with barometric and inertial data. Phd thesis,
Politecnico di Torino.
Bianchi, F., Redmond, S. J., Narayanan, M. R., Cerutti, S.,
and Lovell, N. H. (2010). Barometric pressure and tri-
axial accelerometry-based falls event detection. IEEE
Transactions on Neural Systems and Rehabilitation
Engineering, 18(6):619–627.
Bolanakis, D. E. (2017a). Evaluating performance of
MEMS barometric sensors in differential altimetry
systems. IEEE Aerospace and Electronic Systems
Magazine, 32(9):34–39.
Bolanakis, D. E. (2017b). MEMS Barometers Toward Verti-
cal Position Detection: Background Theory, System
Prototyping, and Measurement Analysis. Synthesis
Lectures on Mechanical Engineering. Springer Inter-
national Publishing, Cham.
Bollmeyer, C., Esemann, T., Gehring, H., and Hellbr
¨
uck,
H. (2013). Precise indoor altitude estimation based
on differential barometric sensing for wireless medi-
cal applications. In 2013 IEEE International Confer-
ence on Body Sensor Networks, pages 1–6.
Bollmeyer, C., Pelka, M., Gehring, H., and Hellbr
¨
uck, H.
(2014). Evaluation of radio based, optical and baro-
metric localization for indoor altitude estimation in
medical applications. In 2014 International Confer-
ence on Indoor Positioning and Indoor Navigation
(IPIN), pages 132–141. IEEE.
Bosch Sensortec GmbH (2024). BMP581 – Barometric
Pressure Sensor. Revision 1.9.
Chopra, S., Kumar, M., and Sood, S. (2016). Wearable pos-
ture detection and alert system. In 2016 International
Conference System Modeling & Advancement in Re-
search Trends (SMART), pages 130–134. IEEE.
Ejupi, A., Brodie, M., Lord, S. R., Annegarn, J., Red-
mond, S. J., and Delbaere, K. (2017a). Wavelet-
Based Sit-To-Stand Detection and Assessment of Fall
Risk in Older People Using a Wearable Pendant De-
vice. IEEE Transactions on Biomedical Engineering,
64(7):1602–1607.
Ejupi, A., Galang, C., Aziz, O., Park, E. J., and Robi-
novitch, S. (2017b). Accuracy of a wavelet-based
fall detection approach using an accelerometer and
a barometric pressure sensor. In 2017 39th Annual
International Conference of the IEEE Engineering in
Medicine and Biology Society (EMBC), pages 2150–
2153. IEEE.
Ghimire, B., Nickel, C., and Seitz, J. (2016). Pedestrian
motion state classification using pressure sensors. In
2016 International Conference on Indoor Positioning
and Indoor Navigation (IPIN), pages 1–6.
Huang, X., Xue, Y., Ren, S., and Wang, F. (2023). Sensor-
based wearable systems for monitoring human motion
and posture: A review. Sensors, 23(22):9047.
Leuenberger, K., Gonzenbach, R., Wiedmer, E., Luft, A.,
and Gassert, R. (2014). Classification of stair ascent
and descent in stroke patients. In 2014 11th Interna-
tional Conference on Wearable and Implantable Body
Sensor Networks Workshops, pages 11–16. IEEE.
Li, X., Zhou, Z., Wu, J., and Xiong, Y. (2021). Human
posture detection method based on wearable devices.
Journal of healthcare engineering, 2021(1):8879061.
Liu, K., Wang, Y., and Wang, J. (2014). Differential baro-
metric altimetry assists floor identification in wlan lo-
cation fingerprinting study. Principle and Application
Progress in Location-Based Services, pages 21–29.
Liu, M., Li, H., Wang, Y., Li, F., and Chen, X. (2018).
Double-windows-based motion recognition in multi-
floor buildings assisted by a built-in barometer. Sen-
sors, 18(4):1061.
Ma, N., Wu, Z., Cheung, Y.-m., Guo, Y., Gao, Y., Li, J., and
Jiang, B. (2022). A survey of human action recog-
nition and posture prediction. Tsinghua Science and
Technology, 27(6):973–1001.
Makma, J., Thanapatay, D., Isshiki, T., Chinrungru-
eng, J., and Thiemjarus, S. (2021). Enhanc-
ing Accelerometer-based Human Activity Recogni-
tion with Relative Barometric Pressure Signal. In
2021 18th International Conference on Electrical
Engineering/Electronics, Computer, Telecommunica-
tions and Information Technology (ECTI-CON), pages
529–532.
Manivannan, A., Chin, W. C. B., Barrat, A., and Bouffanais,
R. (2020). On the Challenges and Potential of Using
BIOSIGNALS 2025 - 18th International Conference on Bio-inspired Systems and Signal Processing
1010

Barometric Sensors to Track Human Activity. Sen-
sors, 20(23):6786.
Mass
´
e, F., Bourke, A. K., Chardonnens, J., Paraschiv-
Ionescu, A., and Aminian, K. (2014). Suitability of
commercial barometric pressure sensors to distinguish
sitting and standing activities for wearable monitor-
ing. Medical Engineering & Physics, 36(6):739–744.
Mass
´
e, F., Gonzenbach, R., Paraschiv-Ionescu, A., Luft,
A. R., and Aminian, K. (2016). Wearable Baromet-
ric Pressure Sensor to Improve Postural Transition
Recognition of Mobility-Impaired Stroke Patients.
IEEE transactions on neural systems and rehabilita-
tion engineering: a publication of the IEEE Engineer-
ing in Medicine and Biology Society, 24(11):1210–
1217.
Mass
´
e, F., Gonzenbach, R. R., Arami, A., Paraschiv-
Ionescu, A., Luft, A. R., and Aminian, K. (2015).
Improving activity recognition using a wearable baro-
metric pressure sensor in mobility-impaired stroke pa-
tients. Journal of NeuroEngineering and Rehabilita-
tion, 12:72.
Matsumoto, M. and Takano, K. (2016). A posture detec-
tion system using consumer wearable sensors. In 2016
10th International Conference on Complex, Intelli-
gent, and Software Intensive Systems (CISIS), pages
526–531. IEEE.
Moncada-Torres, A., Leuenberger, K., Gonzenbach, R.,
Luft, A., and Gassert, R. (2014). Activity classifica-
tion based on inertial and barometric pressure sensors
at different anatomical locations. Physiological Mea-
surement, 35(7):1245.
Nadeem, A., Jalal, A., and Kim, K. (2021). Automatic
human posture estimation for sport activity recog-
nition with robust body parts detection and entropy
markov model. Multimedia Tools and Applications,
80:21465–21498.
Nam, Y. and Park, J. W. (2013). Child activity recogni-
tion based on cooperative fusion model of a triax-
ial accelerometer and a barometric pressure sensor.
IEEE journal of biomedical and health informatics,
17(2):420–426.
Pierleoni, P., Belli, A., Maurizi, L., Palma, L., Pernini,
L., Paniccia, M., and Valenti, S. (2016). A Wear-
able Fall Detector for Elderly People Based on AHRS
and Barometric Sensor. IEEE Sensors Journal,
16(17):6733–6744.
Sabatini, A. M. and Genovese, V. (2014). A Sensor Fu-
sion Method for Tracking Vertical Velocity and Height
Based on Inertial and Barometric Altimeter Measure-
ments. Sensors, 14(8):13324–13347.
Sun, G. and Wang, Z. (2020). Fall detection algorithm for
the elderly based on human posture estimation. In
2020 Asia-Pacific Conference on Image Processing,
Electronics and Computers (IPEC), pages 172–176.
IEEE.
Sun, Y., Lo, F. P.-w., Thiemjarus, S., and Lo, B. (2019).
Wearable fall detection system using barometric pres-
sure sensors and machine learning. In SENSOR-
COMM 2019: The Thirteenth International Confer-
ence on Sensor Technologies and Applications.
Tharwat, A., Gaber, T., Ibrahim, A., and Hassanien, A. E.
(2017). Linear discriminant analysis: A detailed tuto-
rial. AI communications, 30(2):169–190.
Vanini, S., Faraci, F., Ferrari, A., and Giordano, S. (2016).
Using barometric pressure data to recognize vertical
displacement activities on smartphones. Computer
Communications, 87:37–48.
Vecchio, A., Mulas, F., and Cola, G. (2017). Posture recog-
nition using the interdistances between wearable de-
vices. IEEE Sensors Letters, 1(4):1–4.
Wang, C., Lu, W., Narayanan, M. R., Chang, D. C. W.,
Lord, S. R., Redmond, S. J., and Lovell, N. H.
(2016a). Low-power fall detector using triaxial ac-
celerometry and barometric pressure sensing. IEEE
Transactions on Industrial Informatics, 12(6):2302–
2311.
Wang, J., Huang, Z., Zhang, W., Patil, A., Patil, K., Zhu,
T., Shiroma, E. J., Schepps, M. A., and Harris, T. B.
(2016b). Wearable sensor based human posture recog-
nition. In 2016 IEEE International conference on big
data (big data), pages 3432–3438. IEEE.
Wu, M., Pathak, P. H., and Mohapatra, P. (2015). Moni-
toring building door events using barometer sensor in
smartphones. In Proceedings of the 2015 ACM Inter-
national Joint Conference on Pervasive and Ubiqui-
tous Computing, UbiComp ’15, pages 319–323, New
York, NY, USA. Association for Computing Machin-
ery.
Xie, L., Tian, J., Ding, G., and Zhao, Q. (2018). Human ac-
tivity recognition method based on inertial sensor and
barometer. In 2018 IEEE International Symposium on
Inertial Sensors and Systems (INERTIAL), pages 1–4.
Xu, Y. and Qiu, T. T. (2021). Human activity recogni-
tion and embedded application based on convolutional
neural network. Journal of Artificial Intelligence and
Technology, 1(1):51–60.
Xu, Z., Wei, J., Zhu, J., and Yang, W. (2017). A robust
floor localization method using inertial and barome-
ter measurements. In 2017 International Conference
on Indoor Positioning and Indoor Navigation (IPIN),
pages 1–8. IEEE.
Zhu, Y., Luo, H., Zhao, F., and Chen, R. (2020). In-
door/outdoor switching detection using multisensor
densenet and lstm. IEEE Internet of Things Journal,
8(3):1544–1556.
Towards Human Posture Detection Based on Differential Measurements Using Wearable Barometric Pressure Sensors
1011
