
Genetic Algorithm for Optimal Response Time Scheduling of Electric
Vehicle Model
Zouhaira Abdellaoui
1a
and Houda Meddeb
2
1
University of Tunis El-Manar1, National Engineering School of Tunis – ENIT, Communication Systems Research
Laboratory SYSCOM - LR-99-ES21, Tunis-Belvédère, BP 1002, Tunisia
2
University of Lorraine, Automatic Research Center of Nancy, CRAN, UMR 7039, Cosnes and Romain, France
Keywords: DDS, Electric Vehicles, FlexRay, Genetic Algorithm (GA), Optimization, QOS, Suspension Model, SAE
Benchmark.
Abstract: Genetic Algorithms (GAs) are widely recognized for their ability to solve complex optimization problems.
Gas are an effective computational tool designed to identify optimal solutions for optimization issues in
electrical vehicle. In this context, we have developed GA for optimizing the response time based on static
scheduling suspension model of SAE Benchmark electric vehicles. The implemented architecture consists
of multiple nodes connected via the Real- Time middleware Data Distribution Service (DDS) and the
protocol FlexRay in order to benefit from their high speed and QoS.
a
https://orcid.org/0000-0003-2638-3911
1 INTRODUCTION
Traditional vehicles have been gradually supplanted
by electric vehicles (EVs) due to a major revolution
in the automotive sector (Putrus et al.,2009-
Clement-
Nyns and all, 2010
). This progress has led to the
development of sophisticated internal networks
within vehicles, enhancing their overall functionality
and capabilities and highlighting importance of real
time electronic systems in modern vehicle design
and operation.
In recent years, Genetic Algorithms (GAs) have
emerged as a valuable tool in the design of electric
vehicles. These algorithms are being applied to
optimize several crucial parameters. GAs have
proven to be powerful optimization tools, able to
identify solutions for scheduling problem that
enhance multiple aspects of electric vehicle
performance (Chandra et al., 2022).
In this study, we adopted GAs to optimize the
parameters that minimize the suspension model
response time in electrical vehicle. Our architecture
is based on a modern vehicle of SAE Benchmark.
This approach includes multiple nodes connected
through the the real-time communication protocol
FlexRay and the middleware Data Distribution
Service (DDS); which is elaborated in (Abdellaoui
and Hasnaoui, 2019).
Data Distribution Service (DDS) is a standard
middleware, developed by the Object Management
Group (OMG); it is used for real-time, scalable, and
high-performance data exchange between distributed
systems. DDS is frequently employed in large-scale
systems with many nodes that need to
communicate with each other, where reliability, low
latency, and efficient communication are critical
(Abdellaoui and Hasnaoui, 2019). However,
FlexRay is a high-speed communication real time
protocol used in automotive networks. It was
developed as a robust, flexibility, deterministic and
fault-tolerance communication system especially for
modern vehicles. It is very important in safety-
critical systems.
In this work, we developed a GA to estimate
optimal periods of tasks that minimize the Worst
Case Response Time (WCRT) in order optimize the
response time of suspension model of a modern
vehicle of Society of Automotive Engineers (SAE)
Benchmark; this algorithm is applied on the static
scheduling method of electric vehicles. In fact,
optimizing task response times in automotive
electrical systems can guarantee enjoyable driving
experience, performance improvement, extended
476
Abdellaoui, Z. and Meddeb, H.
Genetic Algorithm for Optimal Response Time Scheduling of Electric Vehicle Model.
DOI: 10.5220/0013276200003928
In Proceedings of the 20th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2025), pages 476-483
ISBN: 978-989-758-742-9; ISSN: 2184-4895
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

battery life (Elsayed et al., 2014). The developed
architecture of GA with DDS on top of the FlexRay
bus helped us to provide a data-centric infrastructure
used in fault-tolerant system and automotive domain
whilst taking into account QoS of DDS.
This paper is structured as follows: Section 2
discusses related works. Section 3 presents the
structure design of DDS middleware QoS on
FlexRay protocol network. Section 4 is dedicated for
Genetic Algorithm method. However, the last
section discusses simulation results of suspension
model to evaluate GA performances.
2 LITERATURE REVIEW
2.1 Genetic Algorithm Approach
It is Genetic algorithms were developed by John
Holland in 1975 (
Holland, 1975).
In genetic algorithm (GAs) terminology, a
chromosome represents an individual solution. A
collection of these individuals creates a population.
Each chromosome within this population is a
potential solution for the problem to be solved
(
Chuan-Kang, 2005).The process begins by generating
an initial set of potential solutions, referred to
population. The algorithm then simulates natural
evolution by applying selection, crossover, and
mutation operators to create a new generation for
offspring solutions. The solution's effectiveness and
performance is evaluated using a problem-specific
objective function, which quantifies how well it
addresses the given challenge.
The fitness value, or objective function, of an
individual fixed its chances of survival into the next
generation. Achieving an optimal balance between
exploitation and exploration, by adjusting crossover
and mutation probabilities, can ensure high-quality
offspring and accelerates convergence in
optimization algorithms. In contrast, poorly
considered reproduction probabilities may result in
undesirable convergence to a local optimum.
This evolutionary approach allows the algorithm
to iteratively improve its solutions over multiple
generations. Genetic algorithms are effective for
many problems, including scheduling, optimization
and control.
2.2 Genetic Algorithm Applications
Genetic algorithms are considered as global search
heuristics. In fact, it is a search technique process
employed in computing to find solutions for
optimization and search problems.
GA is applied in Real Time Systems, to generate
a result which satisfies timing constraints. In
(Madureira and all, 2002), authors used GA for
assigning task priorities and offsets in order to
guarantee real time timing constraints, running on
standard Real-Time Operating System (RTOS). GAs
are also applied in planning of Robot Path based on
sensor under real-time unstructured environment
(Yasuda and Takai, 2001). Besides, job scheduling
approves again the feasibility of genetic algorithm
for the resolution of real scheduling problems, which
is solved using a set of static scheduling by GA
(Madureira et al., 2002). The authors in (Chandra
and Lalwani, 2022) implemented Genetic Algorithm
for control parameters setting optimization in hybrid
and parallel EVs. GA algorithm was proposed to
reduce FC (Engine Fuel Consumption and
emissions) using standard criteria.
3 FLEXRAY PROTOCOL AND
MIDDLEWARE DDS IN
AUTOMOTIVE NETWORKS
3.1 The Middleware DDS
We find different classes of middleware such as
DCOM, RMI, CORBA and RPC. They provide a
remote synchronous invocation method. They have
typically built on top of TCP and QoS. Also, they
are familiar with the OO programming model and
they are considered as the most-suited to closely-
coupled and smaller systems. Data Distribution
Service (DDS) is ) a real time middleware and an
open standard managed by the Object Management
Group (OMG), used as an API above operating
system (OS) and peripheral drivers that resume
common interaction patterns. DDS is the first
general-purpose standard middleware that addresses
hard real-time requirements in data-centric
applications and has a large number of configuration
parameters QoS which help developers to complete
maintainability of object state and its control in the
system. That’s why; it became actually the standard
in embedded systems. It dissociates the low-level
architecture and design of application (software
components). It isolates the design and the
validation of SW-components from hardware. It
allows the description of hardware architecture
independently of software application. Actually,
electrical vehicles have higher build complexity and
Genetic Algorithm for Optimal Response Time Scheduling of Electric Vehicle Model
477

software system than a commercial aircraft. This is
why middleware DDS is integrated, since it can
manage this complexity by reuse of software
components and exchangeability (Xiao et al, 2022).
DDS’s DCPS (Data-Centric Publish-subscribe layer)
consists of Publsiher, Subscriber, Domain-
Participant, Topic, DataWriter and DataReader
entities. The idea is to broadcast data directly from a
publisher to all its subscribers without intermediate
servers. DDS is the best middleware that can be
incorporated in an electrical vehicle to interface the
infrastructure low- level. In fact DDS have (Putrus et
al.,2009):
•
Self-healing communication: In case the
network is repaired, the network will
quickly find new nodes and will work again
thanks to the built-in discovering entities
•
Support for custom fault-tolerance:
Implementations can add freely further fault
tolerance such as FFT (Xiao et al, 2024)
•
The support of many network interfaces like
in FlexRay channels (channel-A and
Channel-B) as well as redundant Data
Readers and Data Writers on each node
results in networks completely separate.
Even in the event of a complete network
failure, the system will continue to operate.
•
No single point of failure: DDS needs
«special" nodes, there for it can be
implemented without a single point of
failure thanks to publisher and subscriber
redundancy.
3.2 Flexray Protocol
We have chosen to work within a platform of a
vehicular network based on the extended SAE
BENCHMARK. In this system; a set of network
processors subsystems produces routing data. This
data must be distributed along the vehicular
network.
In fact, we have applied the studied approaches
on a new vehicle benchmark developed in
(Abdellaoui and Hasnaoui, 2019) and based on the
SAE Benchmark. However, this Benchmark was
designed to the best fit the CAN network and with
major modifications and adjustments it be adapted to
the FlexRay protocol.
The resulting architecture is composed of 15
nodes connected by the FlexRay bus. The main
objective of this architecture that we mentioned
previously is to guarantee better performance of the
vehicular network and ensure safety and reliability.
In each node we find an embedded a Real-Time
Operatng System and a publish/subscribe
middleware; in our case we are adapting the DDS as
middleware for developed and modern vehicle. That
will be the best manner to validate of our vehicle
system design. FlexRay Networks is one of the
newest X-by Wire communication systems that offer
high speed which reaches 20 bits/s thanks to its two
channels.
4 SUSPENSION MODEL AS DDS
ENTITIES AND STATIC
SCHEDULING MODEL
4.1 DDS Entities: Suspension Model
In an electric vehicle (EV), the suspension system
plays a crucial role in ensuring ride comfort,
handling stability, and maximizing the efficiency of
the vehicle’s electric power train. Given the unique
characteristics of EVs, their suspension systems
often incorporate specialized designs to address
challenges like battery weight, energy efficiency,
and precise handling. To evaluate this methodology,
we integrated DDS middleware into the vehicle
Blockset. This integration enables applications to
communicate by publishing data they produce and
subscribing to data types they consume. The DDS
middleware allows components in the vehicle
system to exchange information in a publish-
subscribe model, facilitating efficient data
distribution between different nodes of suspension
unit.
4.2 Static Scheduling Model
The Real-time networks protocol FlexRay use either
dynamic or static scheduling approach for
management task. In static scheduling,TDMA Time
Division Multiple Access (TDMA) technique is
employed (
ISO, 199). and tasks are scheduled based
on a time-triggered approach. Each message is
allocated a fixed interval time, "slot," within a
recurring time frame. While this approach ensures
deterministic message transfer, it does not fully
exploit the available network bandwidth. In the
FlexRay protocol, all frames are designed with a
consistent and unchanging length. This
standardization ensures predictability and efficiency
in data transmission where each node employs a
sophisticated tracking system and maintains two
separate slot counters, known as vSlotCounters for
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
478
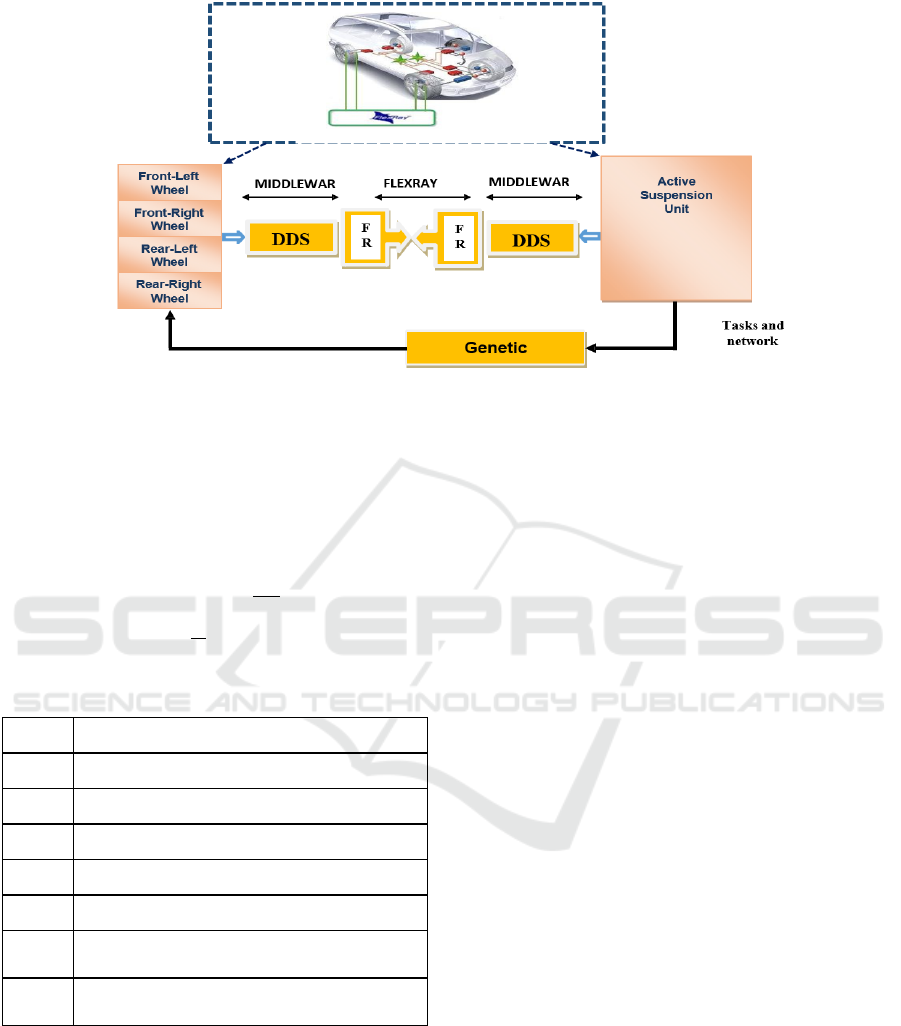
Figure 1: Application scenario: Suspension Model.
channel A and B, the two slot counters initialize at 1
and increment after each slot.Tasks in the static
segment are periodic and maintain the equal priority
across each communication cycle. The Worst Case
Response Time (WRST) calculated based on the
static scheduling model is shown below:
𝑅
=𝐶𝑆
+𝐶
+𝐵
+
𝐶𝑇
+
∑
𝐶𝑇
(1)
Table 1: Suspension Parameters.
𝐶𝑆
1
Costs associated to task switching
𝐶
𝑖
Worst-Case
computation time for tasks i,
B
i
Worst case of blocking time for the task
𝑇
𝑐𝑙𝑘
Clock period for a certain frequency
CT
c
Clock interrupt cost
Г
p
Periodic tasks set
𝑇
j
Minimum time among jobs, task
releases or task
p
eriods
CT
s
Moving cost for single task from
dela
y
queue to the run queue,
5 GA FOR SUSPENSION MODEL
OPTIMAL RESPONSE TIME IN
EVS
In this work, genetic algorithms are employed to
suspension model of electric vehicles in order to
optimize the response time related to each task.
5.1 Genetic Algorithm’s Architecture
The main purpose of this research is to find
tasks period of Suspension model to minimize their
response time. Let T be a decision variable
represented as a column vector with size n, which
specifies the periods for n tasks, and let R denote the
response time as defined in equation (1). There
for Suspension model can be outlined as shown in
the given equations:
min 𝑓(𝑇) =
∑
𝑅
(T) (2)
Under constraints of
5 ≤ 𝑇𝑖 ≤ 320 (3a)
𝑅𝑖 ≥ 𝑀𝑖𝑛_𝑠𝑒𝑝 (3b)
𝑅𝑖 ≤ 𝐷𝑖 ≤ 𝑇𝑖 (3c)
In Equation (2),
(
𝑇
)
represents the fitness of each
chromosome T in the population, calculated as
the total response time across all tasks. The
objective is to identify a vector T* which minimizes
this objective function
(
T
*
)
. T defined as solution
space is further constrained by a set of conditions
outlined in Equation (3). Four operators were
taken into account for the development
of
the
proposed
genetic
algorithm
as shown in figure 2.
The descriptions of these functions are:
Selection: It's a mechanism designed to enhance the
probability that superior solutions will reproduce
and transmit their beneficial traits to the next
generation. This process enables the identification of
the fittest individuals within the current population
to contribute to the formation of the subsequent
generation (
Kinnear, 1994).
Genetic Algorithm for Optimal Response Time Scheduling of Electric Vehicle Model
479
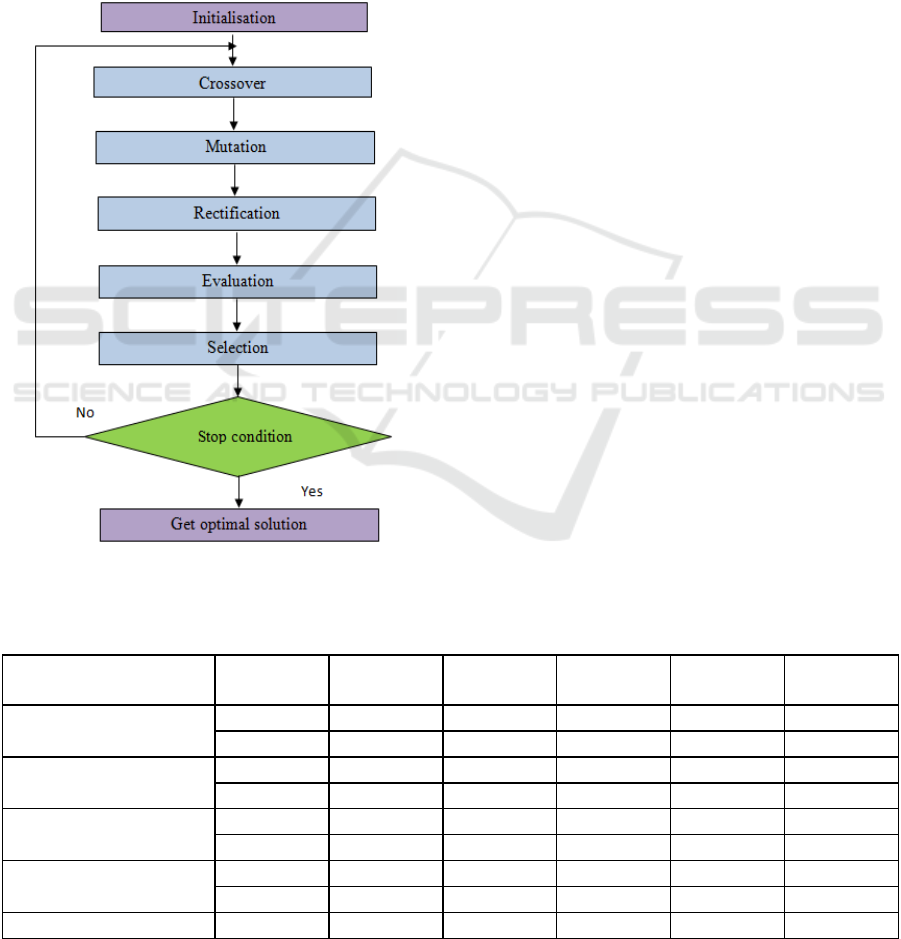
Crossover: Crossover in genetic algorithms (GAs)
is a key genetic operator that combines the genetic
information of two parent solutions to produce one
or more offspring solutions. This mimics the
biological reproduction process and helps in
exploring the solution space more effectively.
Mutation: It is applied at the gene level to the
chromosomes produced by the crossover operation.
It involves selecting a gene as a mutation point and
changing its value to a random integer in the range
of [5, 320]. Here, the lower bound indicates the
minimum value for the gene, while the upper one
signifies its maximum value.
Figure 2: Genetic Algorithm Flowchart.
Rectification: An additional adjustment mechanism
was required when the genetic values of an offspring
do not meet last constraints outlined in equations (3).
This led to the creation of a rectification function
that produces a modified population, denoted as 𝑸˜.
of size M which represents the set of n tasks periods.
𝑇
∈𝑄
is the rectified individual in these conditions:
If 𝑇
<5 then 𝑇
=5, (4)
If 𝑇
> 320 then 𝑇
= 320, (5)
If 𝑇
<𝐷
then 𝑇
=𝐷
, (6)
𝑇
= 𝑇
−𝑚𝑜𝑑
(
𝑇
,5
)
(7)
With , 𝑖 = 1,..,𝑛; 𝑘=1,….,𝑀 and the mod
is the operator which returns the remainder after
division of 𝑇
by 5.
5.2 Genetic Algorithm Application
Scenario
The scenario we have described, outlines a distributed
system for a vehicle's active suspension control
including Rear_Right_wheel, Front_Left_wheel,
Rear_Left_wheel and Front_Right_wheel,using real
time Data Distribution Service (DDS) middleware
and the protocol FlexRay networks.
The inputs for genetic algorithm employed for our
application are:
Task parameters that involve ID, data field
length, delay, deadline, clock period,
interrupt handling cost and clock interrupt.
Network parameters defined by the speed,
which vaires between 5 Mbit/s, 10 Mbit/s,
or 20 Mbit/s.
Its goal is to determine optimal task periods that
minimize response times, there by facilitating low-
latency signal transmission.
Table 2: Results of Suspension model with bus speed of 5 Mbit/s.
Tasks Message ID Size (byte) T (ms) D (ms) Min_Sep
(ms)
R (ms)
Front-leftwheel
module
9
1 20 5 0.0206 0.0206
23 2 10 10 0.0226 0.0227
Front-right wheel
module
10 1 20 5 0.0206 0.0206
24 2 10 10 0.0226 0.0227
Rear-leftwheel
module
11 1 75 5 0.0206 0.0206
25 2 10 10 0.0226 0.0227
Rear-right wheel
module
12 1 15 5 0.0206 0.0206
26 2 10 10 0.0226 0.0227
Active suspension unit 27 2 10 10 0.0226 0.0227
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
480
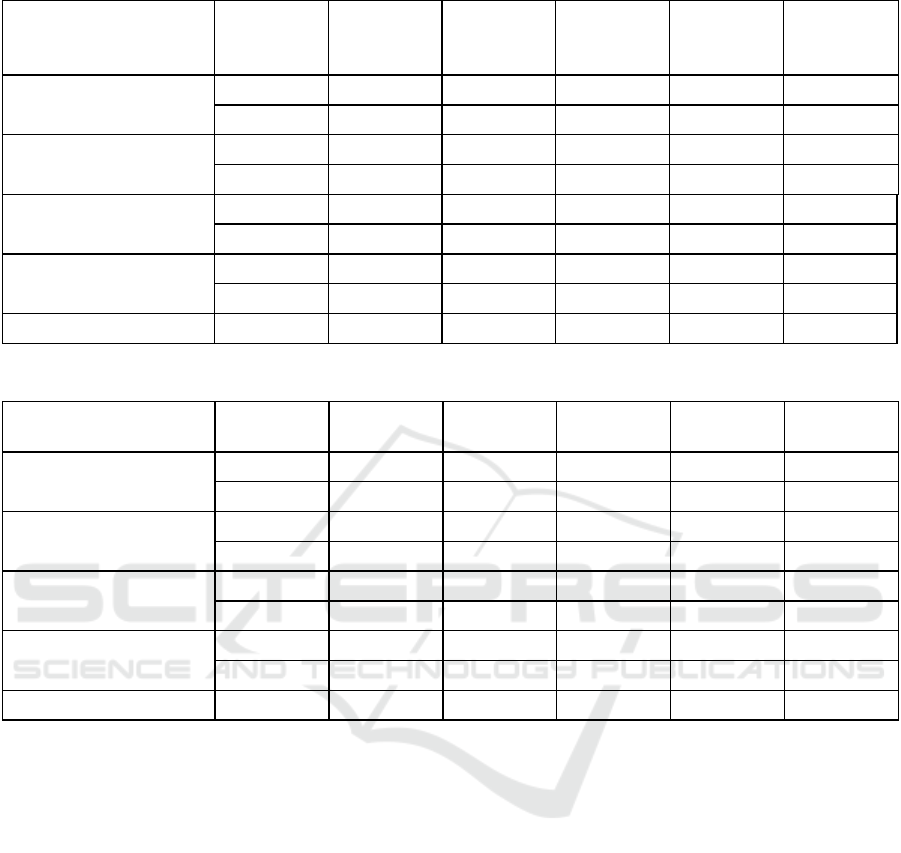
Table 3: Results of Suspension model with bus speed of 10 Mbit/s.
Tasks Message ID Size(byte) T(ms) Delay(ms) Min
separation
(ms)
R(ms)
Front-leftwheel
module
9
1 140 5 0.0103 0.0105
23 2 125 10 0.0113 0.0115
Front-right wheel
module
10 1 20 5 0.0103 0.0105
24 2 20 10 0.0113 0.0115
Rear-leftwheel module 11 1 140 5 0.0103 0.0105
25 2 130 10 0.0113 0.0115
Rear-right wheel
module
12 1 20 5 0.0103 0.0105
26 2 20 10 0.0113 0.0115
Active suspension unit 27 2 10 10 0.0113 0.0115
Table 4: Results of Suspension model with bus speed of 20 Mbit/s.
Tasks Message ID Size(byte) T(ms) D(ms) Min_Sep
(ms)
R(ms)
Front-leftwheel
module
9
1 75 5 0.0052 0.0053
23 2 45 10 0.0057 0.0058
Front-right wheel
module
10 1 160 5 0.0052 0.0053
24 2 270 10 0.0057 0.0058
Rear-leftwheel module 11 1 5 5 0.0052 0.0053
25 2 45 10 0.0057 0.0058
Rear-right wheel
module
12 1 235 5 0.0052 0.0053
26 2 105 10 0.0057 0.0058
Active suspension unit 27 2 10 10 0.0057 0.0058
6 EVALUATION OF SUSPENSION
MODEL SIMULATION
RESULTS
For this evaluation, our application is presented by
the standard SAE Benchmark model using
middleware DDS, FlexRay real-time protocol as
communication support and GA to estimate the
worst-case response time (WCRT) for
communication tasks across suspension's nodes.
6.1 Suspension Simulation Results
The genetic algorithm was performed with a
population size of 30 and 300 iterations. The results
are displayed in the following tables.
The results confirm that DDS Quality of Service
(QoS) requirements are effectively met, especially
those concerning deadline and minimum separation,
while accounting for latencies introduced by the
FlexRay. The objective function evolution for the
suspension node is illustrated in figure 3.
6.2 GA Performance Evaluation with
Suspension Model
To evaluate the GA's performance, tests were
conducted with different population sizes and bus
speeds. The table shows the results for the
suspension-model.
Table 5 reveals that convergence time tends to
increases as the population size grows. Moreover,
the proposed GA occasionally converges to a local
optimum. However, a population size of 30 yielded
the global optimum. Cost or objective function
evolution for suspension model is illustrated in
figure Figure 4.
Genetic Algorithm for Optimal Response Time Scheduling of Electric Vehicle Model
481

Figure 3: Objective function Evolution for Suspension model.
Table 5: Algorithm Performance Results in function of bus speed and population size.
Bus speed 5Mb/s et iteration 300
Population 10 30 50 70 100 120
Convergence time 10.31 59.99 80.93 168.15 312.43 451.31
Objective function 0.1962 0.1959 0.1966 0.1963 0.1961 0.1961
Bus speed 10Mb/s
Population 10 30 50 70 100 120
Convergence time 8.71 52.59 123.81 220.65 325.74 470.29
Objective function 0.0995 0.0995 0.1004 0.1004 0.1004 0.1000
Bus speed 20Mb/s
Population 10 30 50 70 100 120
Convergence time 10.62 37.06 67.50 136.54 237.65 375.69
Objective function 0.0511 0.0502 0.0502 0.0502 0.0511 0.0511
Figure 4: Objective function evolution for Suspension
model.
In a second scenario, we defined the stopping
criterion as the verification of constraint (3a). The
algorithm halts once it finds a solution that satisfies
this constraint. The adopted algorithm was
implemented for suspension nodes, and the results
for a bus speed of 5 Mb/s are presented in table 6:
Table 6: Performance of GA in function of population
size.
Bus speed 5Mb/s
Population 10 30 50 70 100
Convergence
Time
3.43 10.12 24.07 67.41 99.10
Objective
function
0.196
3
0.196
3
0.196
3
0.196
3
0.196
3
Iteration
number
123 90 100 127 114
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
482

7 CONCLUSION
This work introduces a novel approach of genetic
algorithm based on the static scheduling model of
SAE Benchmark electric vehicle EVs. The design
integrates the Real-Time protocol FlexRay with
Data Distribution Service middleware.
GA approach is applied on the Suspension model
to identify the optimal task periods which led to
minimize the required response time.
A performance evaluation is conducted to
validate the efficiency of the proposed approach in
the design of EVs.
ACKNOWLEDGMENTS
We wish to express our gratitude to the SYSCOM
ENIT members for their help and assistance.
REFERENCES
Putrus G. A., Suwanapingkarl P., Johnston D., Bentley E.
C., and Narayana M. (2009). “Impact of Electric
Vehicles on Power Distribution Networks”, in Proc.
IEEE Vehicle Power and Propulsion Conf., pp. 827-
831.
Clement-Nyns K., Haesen E., and Driesen J. (2010). “The
Impact of Charging Plug-In Hybrid Electric Vehicles
on a Residential Distribution Grid”, IEEE Trans.
Power Systems, vol. 25, pp. 371-380.
Chandra A., Lalwani J. and Jajodia B. (2022). “Towards
an Optimal Hybrid Algorithm for EV Charging
Stations Placement using Quantum Annealing and
Genetic Algorithms,”International Conference on
Trends in Quantum Computing and Emerging
Business Technologies (TQCEBT).
Abdellaoui Z. and Hasnaoui S. (2019). “DDS Middleware
On top of FlexRay Networks: Simulink Blockset
Implementation of Electrical Vehicle and its
Adaptation to DDS concept using the FlexRay
Protocol’’, International Journal of Soft Computing,
Soft Computing Volume 23, pages11539–11556.
Elsayed S. M., Sarker R. A., and Essam D. L. (2014), “A
new genetic algorithm for solving optimization
problems,” Engineering Applications of Artificial
Intelligence, vol. 27, pp. 57–69.
Holland J. H. (1975). Adaptation in natural and artificial
systems. Ann Arbor: University of Michigan Press.
Ting, Chuan-Kang (2005). “On the Mean Convergence
Time of Multi-parent Genetic Algorithms without
Selection”. Advances in Artificial Life: 403–412. ISBN
978-3-540-28848-0.
Madureira A., Ramos C., do Carmo Silva S. (2002). “A
Coordination Mechanism for Real World Scheduling
Problems using Genetic algorithms”, Evolutionary
Computation, 2002. CEC ’02. Proceedings of the
2002, Congress on, 1, pp 175 –180.
Yasuda, G. and Takai, H. (2001). “Sensor-based Path
Planning and Intelligent Steering Control of
Nonholonomic Mobile Robots”, Industrial Electronics
Society, 2001. IECON ’01. The 27th Annual
Conference of the IEEE, 1,Page(s): 317 -322,1.
Chandra A., Lalwani J. and Jajodia B. (2022), “Towards
an Optimal Hybrid Algorithm for EV Charging
Stations Placement using Quantum Annealing and
Genetic Algorithms,”International Conference on
Trends in Quantum Computing and Emerging
Business Technologies (TQCEBT)
Xiao H., et al. (2022)."Edge Intelligence: A
Computational Task Offloading Scheme for
Dependent IoT Application," in IEEE Transactions on
Wireless Communications, vol. 21, no. 9, pp. 7222-
7237, doi: 10.1109/TWC.2022.3156905.
Xiao H., et al. (2024). “VAAC-IM: Viewing Area
Adaptive Control in Immersive Media Transmission”.
In Proceedings of the 34th edition of the Workshop on
Network and Operating System Support for Digital
Audio and Video (NOSSDAV '24). Association for
Computing Machinery, New York, NY, USA, 8–14.
https://doi.org/10.1145/3651863.3651877.
International Standard Organization (1994), ISO 11519-2,
Road Vehicles - Low Speed serial data
communication- Part 2: Low Speed Controller Area
Network, ISO.
Kinnear K. E. (1994).’’A Perspective on the Work’’in this
Book. In K. E. Kinnear (Ed.), Advances in Genetic
Programming (pp. 3-17). Cambridge: MIT Press.
Genetic Algorithm for Optimal Response Time Scheduling of Electric Vehicle Model
483
