
Routing and Charge Planning Strategies for Ridesharing EV Fleets
Ashutosh Singh and Arobinda Gupta
Dept. of Computer Science & Engineering, Indian Institute of Technology Kharagpur, WB-721302, India
Keywords:
Electric Vehicle, Ridesharing Fleet, Request Assignment, Charge Scheduling.
Abstract:
Ridesharing systems have become an important part of urban transportation. At the same time, electric vehicle
(EV) adoption is also growing at a fast pace as an eco-friendly and sustainable transportation option. To operate
a ridesharing system with EV fleets, scheduling an EV fleet to serve passenger requests requires consideration
of both the requests, and the available charge and potential future charge requirements of the EVs. In this
paper, we address the problem of scheduling EVs by a ridesharing operator, and propose four algorithms
that schedule passenger requests while taking into consideration charging requirements of the EVs. Detailed
simulation results are presented on a real world data set to show that the algorithms perform well.
1 INTRODUCTION
Ridesharing systems have become an important part
of urban transportation, providing on-demand, conve-
nient, and accessible transportation services to pas-
sengers, reshaping the way people move within cities.
Within this evolving landscape, Electric Vehicle (EV)
fleets can play a pivotal role offering a sustainable and
eco-friendly solution to meet the demands of rideshar-
ing. An EV fleet is a collection of electric vehicles
that are owned, operated, or managed by a single cen-
tral entity such as a ridesharing service operator.
A ridesharing operator receives passenger re-
quests for rides and schedules vehicles under its con-
trol based on different criteria/constraints. In compar-
ison to a fleet of non-EV vehicles, scheduling an EV
fleet should consider both passenger requests, and the
current available charge and potential future charge
requirements of the EVs. As the operator controls all
the EVs, it can have complete knowledge about the
EVs at any point in time, which includes their loca-
tion, current charge levels etc. This can allow the op-
erator to plan routes and manage charging schedules
of the EVs more efficiently, leading to lower operating
costs. The focus of this paper is addressing the prob-
lem of scheduling passenger requests by a ridesharing
operator with EV fleet while considering the charging
needs of the EVs under different constraints.
The problem addressed can be divided into two
parts, the assignment of EVs to passenger requests,
and scheduling the charging of EVs at appropriate
charging stations at appropriate times. The first part
of the problem closely resembles the Vehicle Routing
Problem (VRP), a well-studied optimization problem
in logistics and several works have addressed differ-
ent variants of the problem. Mor et al. (Mor and
Speranza, 2020) provide a comprehensive survey of
the existing works on the vehicle routing problem.
Similarly, the fleet charging problem has also been
investigated, Ma et al. (Ma and Fang, 2022) pro-
vide a survey of the recent developments in this area.
However, there has been very little work at the inter-
section of these two problems. Solving the EV fleet
scheduling problem with passenger requests needs to
consider both – the aspect of vehicle assignment and
routing, and the aspect of charge scheduling. The
few works that have addressed both these issues si-
multaneously (Lu et al., 2012; Chen et al., 2018;
Zalesak and Samaranayake, 2021; Yu et al., 2021)
mostly formulate the problem as a mixed-integer lin-
ear programming (MILP) problem and use optimiza-
tion solvers to solve the problem, or use a reinforce-
ment learning approach. These approaches have an
exponential time complexity in terms of the problem
size, and only work when the problem size (number
of EVs, requests, etc.) is small, thus making these
approaches non-scalable. Also, most of these works
solve the offline version of the problem, and have ex-
plored a limited set of objective functions.
In this paper, we address the problem of assign-
ing EVs to passenger requests while taking into con-
sideration the charge availability and charging needs
of the EVs. We propose an entirely algorithmic ap-
proach to the two parts of the online version of the
76
Singh, A. and Gupta, A.
Routing and Charge Planning Strategies for Ridesharing EV Fleets.
DOI: 10.5220/0013282100003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 76-87
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

problem, exploring new objective functions. In par-
ticular, we propose two strategies each for assigning
passenger requests to EVs and for scheduling EVs
for charging, and consequently, four algorithms using
their combination for the overall problem addressed
that tries to maximize the number of requests served.
Detailed simulation results are presented on a real-
world dataset to show that the algorithms perform
quite well.
The rest of the paper is organized as follows. Sec-
tion 2 provides a brief overview of related works in
the area. Section 3 presents the formal definition of
the problem. Section 4 presents the proposed algo-
rithms. Detailed simulation results are shown in Sec-
tion 5. Finally, Section 6 concludes the paper.
2 RELATED WORKS
The problem of charging EV fleets have been exten-
sively investigated, both in the area of planning the
charging infrastructure (the number and location of
charging stations, size of EV fleet, charging station
equipment, etc.) (H
¨
all et al., 2018; Zhang et al., 2020;
Schiffer and Walther, 2018; Guo et al., 2021; She-
hadeh et al., 2021; Wu et al., 2021), location-routing
optimization (Schiffer and Walther, 2017; Hua et al.,
2019; Stumpe et al., 2021; Ma and Xie, 2021), and
operational planning such as making decisions on
vehicle routes, charging time and place, amount of
charge etc. (Chen et al., 2016; Zalesak and Sama-
ranayake, 2021; Wang et al., 2018; Lin et al., 2021;
Shi et al., 2020; Guo and Xu, 2022; Lin et al., 2018;
Kullman et al., 2022).
In the area of EV fleet charging while serving pas-
senger requests, which is the focus of this paper, Lu
et al. (Lu et al., 2012) introduce a dispatching policy
designed to optimize electric taxi operations by fac-
toring in taxi demand, the state of charge of electric
taxis, and the presence of battery charging/switching
stations. The primary goal is to minimize recharg-
ing waiting times, ultimately increasing the number
of working hours for taxi drivers. Chen et al. (Chen
et al., 2018) develop a mathematical model to ad-
dress the optimal routing and charging of EV fleets
within a road network, considering factors such as EV
charging rates, charging costs, and state-of-charge re-
quirements. The primary objective is to minimize a
weighted combination of route distances, travel times,
and charging expenses while ensuring that all passen-
ger requests are met. Zalesak et al. (Zalesak and
Samaranayake, 2021) focus on an online electric ve-
hicle ride-sharing system, where real-time customer
requests arrive with specific entry times, origins, and
destinations. The primary objective was to minimize
the cost of accommodated trips while penalizing un-
served requests. Yu et al. (Yu et al., 2021) tackle
the dynamic optimization problem of maximizing to-
tal profit in a vehicle dispatching system by consid-
ering various factors such as customer requests, EV
charging rates, and penalties for dispatching time and
delays. The primary objective is to determine optimal
vehicle dispatching, relocation, and recharging deci-
sions to maximize revenue while minimizing penal-
ties. As observed earlier, these works are not scal-
able to large number of EVs and requests, and most
of these works solve the offline version of the prob-
lem.
3 PROBLEM FORMULATION
We consider a city with a set of fixed charging sta-
tions located at specific locations in the city, where a
ridesharing service operator operates a fleet of EVs to
service passenger requests. The total duration of op-
eration (for example, from 6 am to 8 pm in a day etc.)
is broken up into T time instants. The road network in
the city is modeled as a directed graph G = (N , A),
where N denotes the set of vertices or nodes, and A
is the set of edges (roads between nodes). The nodes
can be charging stations, pickup or dropoff locations,
or other geographical locations of relevance. The dis-
tance between two nodes i and j is denoted by d(i, j).
Note that due to the nature of roads, it may happen
that d(i, j) ̸= d( j,i).
Let V denote the set of all EVs belonging to
the fleet. All EVs are assumed to be identical, and
are centrally controlled by the ridesharing operator.
Each EV can serve only one passenger request at a
time. An EV v ∈ V can be represented as a tuple
⟨s
v
, loc
v,t
, soc
v,t
, u, b⟩, where s
v
∈ N denotes the start
location of the EV, loc
v,t
denotes the location of the
EV v at time t, soc
v,t
denotes the state of charge (SOC)
of the EV v at time t (battery charge remaining as
a percentage of the total battery capacity), u denotes
the speed of the EV (assumed to be constant when the
EV moves), and b denotes the charge consumption
per unit distance (assumed to be constant). Thus the
time taken to travel from node i to j is t
i, j
= d(i, j)/u.
Also, the battery consumption while travelling from
node i to j is given by β
i, j
= b · d(i, j ). The battery
capacity of all vehicles is denoted by Q (in kWh).
Let S be the set of all fixed charging stations
(FCS). A charging station s ∈ S can be represented
as a tuple ⟨loc
s
, c
s
, α
s
, q
s,t
⟩, where loc
s
∈ N denotes
the location of the charging station s, c
s
denotes the
capacity of the charging station s (the maximum num-
Routing and Charge Planning Strategies for Ridesharing EV Fleets
77

ber of vehicles that can be charged at the charging sta-
tion at the same time), α
s
denotes the charging rate of
the charging station, and q
s,t
denotes the number of
vehicles in the queue for charging at the charging sta-
tion s at time t. Every charging station follows the
First Come, First Serve (FCFS) policy for servicing
charging requests.
Let R be the set of all passenger requests that
are received over the time period under considera-
tion. Each request r ∈ R can be represented as a tu-
ple ⟨e
r
, pick
r
, drop
r
⟩, where e
r
denotes the time the
request is raised, pick
r
∈ N denotes the pickup lo-
cation, and drop
r
∈ N denotes the drop-off location.
The time when an EV arrives at the pickup location
for request r is denoted as a
r
. We also impose a QoS
constraint on serving passenger requests in the form
of a maximum waiting time parameter, t
max
w
, within
which a passenger needs to be picked up after making
a request. Note that given an arbitrary set of passenger
requests and a number of EVs, it may not be possible
to serve all requests. If it is not possible to assign a
vehicle to a request satisfying this QoS requirement,
then that request is rejected.
The output variables for the problem can be rep-
resented by the following matrices, which cover the
state of all EVs over all time instants.
1. V × T matrix Avail, where Avail[v,t] = 1, if vehi-
cle v is available for serving a passenger request
at time t, 0 otherwise.
2. V × T matrix MovingToFCS, where
MovingToFCS[v,t] = 1, if vehicle v is mov-
ing towards a charging station at time t, 0
otherwise.
3. V ×T matrix WaitFCS, where WaitFCS[v,t] = 1,
if vehicle v is waiting for its turn, in the queue, at
a charging station at time t, 0 otherwise.
4. V × T matrix MovingToPickup, where
MovingToPickup[v,t] = 1, if vehicle v is
moving towards a pickup location of a passenger
at time t, 0 otherwise.
5. V × S × T matrix Charging, where
Charging[v, s,t] = 1, if vehicle v is being charged
at charging station s at time t, 0 otherwise.
6. V × R × N matrix Req, where Req[v, r,t] = 1, if
vehicle v is assigned to passenger request r at
time t, 0 otherwise. The time that a vehicle v is
assigned to a request r includes all time instants
starting from the time the decision of assigning v
to r is made till the passenger is dropped off at
the dropoff locaton of r; thus it includes the time
when v is moving towards the pickup location of
the r, and the actual journey time from the pickup
location to the dropoff location.
The primary objective of the problem is to max-
imize the number of passenger requests served. Let
I
v,r,t
denote an indicator variable that takes a value 1
if Req[v,r,t] = 1 and Req[v, r,t − 1] = 0, 0 otherwise.
The number of requests served is then given by
Num
Served =
∑
v∈V .r∈R ,t∈T
I
v,r,t
Hence, the objective is to maximize Num Served sub-
ject to the following constraints.
1. If a passenger request is served, it must be served
by exactly one EV.
∀r ∈ R , ∀t
1
,t
2
∈ T, ∀v
1
,v
2
∈ V , (Req[v
1
,r,t
1
] =
Req[v
2
,r,t
2
] = 1) =⇒ (v
1
= v
2
)
2. A request can be assigned to a vehicle only if it is
free.
∀r ∈ R , ∀v ∈ V , ∀t ∈ T, (Req[v, r,t] = 1 ∧
Req[v, r,t − 1] = 0) =⇒ (Avail[v,t − 1] = 1)
3. Any vehicle can serve only one request at a time.
∀v ∈ V , ∀r
1
,r
2
∈ R , ∀t ∈ T, (Req[v,r
1
,t] =
Req[v, r
2
,t] = 1) =⇒ (r
1
̸= r
2
)
4. Once a request is assigned to a vehicle, it stays
assigned to the same vehicle till the vehicle
reaches the request’s dropoff location.
∀r ∈ R , (∃v ∈ V , t ∈ T, Req[v, r,t] =
1 ∧ Req[v,r,t − 1] = 0) =⇒ ((∀t
′
∈
[t,t
d
], Req[v,r,t
′
] = 1) and Req[v,r,t
d
+ 1] = 0)
where t
d
is the dropoff time of the corresponding
request.
5. If a request r is accepted, then the passenger
should not have to wait for more than t
max
w
time,
i.e., the pickup location should be visited by the
vehicle before (e
r
+t
max
w
).
∀r ∈ R , (∃v ∈ V ∃t ∈ T, (Req[v,r,t] =
1 ∧ Req[v, r,t − 1] = 0) =⇒ (∃t
′
∈
[t, e
r
+t
max
w
], loc
v,t
′
= pick
r
).
6. A request is accepted by a vehicle only if it has
enough charge left to reach the nearest charging
station after dropping the passenger.
∀v ∈ V , ∀r ∈ R , (∃t ∈ T, (Req[v,r,t] =
1 ∧ Req[v,r,t − 1] = 0) =⇒ (soc
v,t
≥
b × (d(loc
v,t
, pick
r
) + d(pick
r
,drop
r
) +
d(drop
r
, loc
s
min
))), where s
min
=
argmin
s∈S
d(drop
r
, loc
s
) (the charging station
nearest to the dropoff location).
7. At any time instant, an EV can be in exactly one
of the following states: available (idle), moving to
an FCS, waiting at an FCS, being charged at an
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
78

FCS, or assigned to a passenger request.
∀v ∈ V , ∀t ∈ N, Avail[v,t]+MovingToF CS[v,t]
+ WaitFCS[v,t] +
∑
s∈S
Charging[v, s,t]
+
∑
r∈R
Req[v, r,t] = 1
8. Each charging station can charge a maximum of
c
s
EVs simultaneously.
∀s ∈ S , ∀t ∈ T,
∑
v∈V
Charging[v, s,t] ≤ c
s
9. An EV will not be charged while it is serving a
passenger request.
∀v ∈ V , ∀r ∈ R , ∀t ∈ T, ∀s ∈ S , (Req[v,r,t] ∧
Charging[v, s,t]) = 0
10. When an EV starts charging at a charging station,
it stops charging only when its SOC reaches
100%.
∀v ∈ V , ∀s ∈ S, ∀t ∈ T, (Charging[v, s,t] =
1 ∧ Charging[v,s,t − 1] = 0) =⇒
((∀t
′
∈ [t,t
d
], Charging[v, s,t
d
] =
1) and Charging[v,s,t
d
+ 1] = 0) where
t
d
= t + (100 − soc
v,t−1
) ∗ Q/α
s
The constraints on the system can be categorized
as passenger request constraints (Constraints 1 to 6),
constraints on movement of EVs (Constraint 7), and
battery/charging constraints (Constraints 8 to 10).
While maximizing the number of requests served
is the primary objective, it is also important to have
lower average waiting time of all requests served (in-
dicating how fast an EV arrived at the pickup location
after a passenger request is made) and lower average
distance travelled by an EV during which it does not
serve any passenger requests (a measure of wasted
travel).
4 ALGORITHMS
In this section, four heuristic algorithms are presented
for assigning EVs to passenger requests and schedul-
ing the EVs for charging. We first present two policies
for the assignment of EVs to passenger requests (Sec.
4.1), Nearest Feasible EV Assignment and Dropoff
Demand Based EV Assignment. We then present
two policies for charge scheduling of the EVs (Sec
4.2): Waiting Time Based Charging Policy and SOC
Comparison Based Charging Policy . Based on these
policies, the following four algorithms for assigning
EVs to passenger requests and scheduling the EVs for
charging are proposed, simply by taking all combina-
tion of the policies.
• [C1: Nearest, Waiting Time] - Nearest Feasible
EV Assignment, Waiting Time Based Charging
Policy.
• [C2: Nearest, SOC Comparison] - Nearest Fea-
sible EV Assignment , SOC Comparison Based
Charging Policy.
• [C3: Dropoff Demand Based, Waiting Time] -
Dropoff Demand Based EV Assignment, Waiting
Time Based Charging Policy.
• [C4: Dropoff Demand Based, SOC
Comparison] - Dropoff Demand Based EV
Assignment, SOC Comparison Based Charging
Policy.
Sec 4.3 also proposes an optimization based on
routing idle EVs to specific locations in advance that
may prove helpful in some specific scenarios. This
optimization can be used with any of the above men-
tioned four algorithms.
4.1 Assignment of EVs to Passenger
Requests
Passenger requests arrive in the system in an online
manner. For each request received, a feasible set of
EVs is determined first, and then an EV is chosen
from this set for serving the request based on some
policy. An EV is said to be feasible for a request if all
of the following conditions are satisfied:
• The EV is currently available, i.e., it is not as-
signed to any other request and has not been dis-
patched for charging.
• The time taken for the EV to reach the pickup lo-
cation of the request is less than or equal to the
maximum waiting time of the request.
• After dropping the passenger at the dropoff loca-
tion of the request, the EV would have sufficient
charge left to reach the nearest charging station.
After determining the set of feasible EVs for a re-
quest, we consider two alternative policies to assign
an EV from the set of feasible EVs to the request.
Nearest Feasible EV Assignment. In this policy,
the EV in the feasible set that is closest to the
pickup location of the request is assigned to serve
the request. The intuition behind this is that it
minimizes the wait time for the passenger, and the
EV can complete this trip faster (compared to any
other EV), and hence can become ready again for
serving further requests sooner.
Dropoff Demand Based EV Assignment. In this
policy, an EV is assigned from the feasible set
based on an estimate of the future demand of
Routing and Charge Planning Strategies for Ridesharing EV Fleets
79

EVs at the drop location. If the estimated future
demand is deemed to be high at the drop location,
then we assign the feasible EV with the highest
SOC to the current request. Otherwise, we assign
the feasible EV with the lowest SOC to the
request. The intuition behind dispatching the EV
with the highest SOC is that if the demand at the
drop location is high, then after completing this
request, the EV can be assigned another request
closer to the drop location. On the other hand, we
send the EV with the lowest SOC if the demand is
low, so that after completing the current request,
the EV can go for charging if needed.
The demand at a location varies with different pa-
rameters such as the time of the day, day of the
week etc. To estimate the future demand at a lo-
cation,, we use a simple estimate based on the
past request data seen so far. To calculate the de-
mand at a location n, the set of all requests seen
so far (totalReq) is considered. From all such re-
quests, the number of requests (numRadiusReq)
with their pickup locations within a fixed ra-
dius (DEMAND RADIUS) of the location n, are
counted. The demand at location n is then esti-
mated as the ratio numRadiusReq/totalReq. If
this ratio is higher than a threshold, the demand
is said to be high; otherwise the demand is taken
as low. It is important to note that while we have
used a simple scheme to estimate the demand,
any other method that gives a demand estimate
for a place and time using past data can be eas-
ily plugged into our proposed algorithms.
4.2 Charge Scheduling Policies
The charge scheduling policy determines when an EV
should go for charging. The EV always goes to the
closest charging station for charging, and gets charged
till its SOC reaches 100%. The following two charg-
ing policies are proposed.
4.2.1 Waiting Time Based Charging Policy
In this policy, an EV is dispatched for charging if the
following conditions are satisfied:
• The SOC of the EV is below a threshold
HIGH S OC, and at least one of the following two
conditions hold:
– The SOC of the EV is less than a threshold
(MIN SOC).
– The EV has been idle (not servicing any re-
quest) for more than a threshold amount of time
(CHARGE MAX WAIT ).
The intuition behind this policy is straightforward. An
EV with a low charge should go for charging as oth-
erwise it cannot serve any request anyway. In addi-
tion, even if an EV has sufficient charge, it can still
go for charging if the demand is low (high idle time),
thereby utilizing the idle time to get more charge to
be able to serve future requests better. The parame-
ter HIGH SOC is kept high so that an EV with high
charge does not go for charging even if it is idle for a
long time.
4.2.2 SOC Comparison Based Charging Policy
In this policy, an EV v is dispatched for charging if
the following conditions hold:
• The SOC of v is below a threshold HIGH SOC,
and at least one of the following two conditions
hold:
– The SOC of v is less than a threshold
(MIN SOC).
– v has been idle (not servicing any request)
for more than a threshold amount of time
(CHARGE MIN WAIT ), and of all EVs within
a fixed radius (CHARGE RADIUS) of the
current location of v, at least a fraction
(HIGHER SOC RAT IO) has SOC higher than
v.
The intuition here is similar to the earlier policy, ex-
cept that it is also ensured that when an EV is sent
for charging, there are some EVs in its neighborhood
that can serve a probable future request with pickup
location around the EV being sent for charging. The
wait time parameter in this policy should typically be
less than that considered in the previous policy, as the
additional condition ensures that there are sufficient
number of EVs available for serving requests even if
this EV goes to charge after waiting a smaller amount
of time.
4.3 Routing Idle EVs
We also propose an additional optimization, which
proves beneficial in some scenarios. It can be used
with any of the proposed algorithms. Essentially,
some idle EVs can be routed to locations where the
future demand is anticipated to be high, so that when a
passenger request does come, there is a higher chance
of finding a free EV close by to service the request.
Again, since the future demand cannot be known ex-
actly in advance, it is approximated using the past
demand. The optimization consists of the following
steps.
• Finding the locations with the highest predicted
demand: For each location n, a small time win-
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
80

dow (ROUTING WINDOW) in the recent past is
considered, and all requests that have arrived in
this window are considered. Out of these requests,
we count the number of requests that could be
reached by an EV before the maximum wait time,
had an EV been standing at location n. This gives
the number of eligible requests in a neighbour-
hood. This, divided by the current number of EVs
within a reachable distance of location n, gives the
demand estimate.
• Finding an idle EV to route to the location with
the highest predicted demand: All EVs that are
idle, that have their SOC above a threshold, and
the number of available EVs in their neighbour-
hood (within a radius NEARBY RADIUS) above
a threshold (MIN NEARBY EVS) are considered
to be candidate EVs for routing. Out of these, the
EV closest to the location with the highest pre-
dicted demand is chosen and sent to that location.
Note that in this case, EVs can move from one lo-
cation to another without being assigned to a pas-
senger request and even if it is not dispatched for
charging.
5 SIMULATION RESULTS
The proposed algorithms are evaluated by simulating
them on a real-world dataset. We consider the map of
Manhattan in New York. The area considered spans
around 41 km
2
. Request patterns are obtained from
the New York City Taxi Trip Dataset (Donovan and
Work, 2016). This dataset contains information about
multiple yellow taxi trips on each day from 2010 to
2013. From this dataset, the day of 15 January, 2013,
is chosen for sampling requests. Only requests that
are made between 7 am and 7 pm are considered,
which gives a total of 266704 requests on this day.
The dataset gives the pickup and dropoff coordinates
(latitude and longitude), the pickup and dropoff times,
the time taken to complete the trip, and the trip dis-
tance. These pickup and dropoff coordinates serve
as nodes on the map. Some random coordinates on
the map are also chosen to serve as nodes for plac-
ing charging stations and choosing initial position of
the EVs. For a pickup-dropoff node pair, the distance
between them, and the time it would take to reach
one node from the other, is known directly from the
dataset. For any other pair of nodes, the distance be-
tween them is taken to be the geodesic distance be-
tween them (the minimum distance between the nodes
on the surface of the earth). The time to travel from
one node to the other is calculated by dividing the
geodesic distance by the constant speed of the EV.
The values of the parameters related to charging
stations and EVs are shown in Table 1. For all EV
parameters, we consider values similar to an average
real-world EV, for ex. Nissan Leaf (Nissan, 2023).
Table 1: Parameter values for experimental setup.
Charging Stations
Capacity 1
Charging Rate 40 kW per hour
EVs
Initial SOC 100%
Battery Capacity 40 kWh
Speed 25 km/h
Range with full charge 240 km
Other Constants
DEMAND RADIUS 1 km
DEMAND THRESHOLD 0.1
HIGH SOC 80%
MIN SOC 20%
CHARGE MAX WAIT 1 hr
CHARGE MIN WAIT 10 min
CHARGE RADIUS 5 km
HIGHER SOC RATIO 0.5
The number of EVs are varied from 5 to 40. EVs
have random starting points on the map. The num-
ber of charging stations is kept constant at 10, whose
locations are randomly chosen on the map of Manhat-
tan. A fixed number of requests are sampled from the
entire set of requests on the specified day between 7
am and 7 pm. In particular, the number of requests
sampled are taken as 500 and 1000. The maximum
wait time is kept fixed at 15 minutes for each request.
Three datasets for evaluation are constructed first
from the total number of requests in the original
dataset. For the first dataset, requests are sampled uni-
formly from the total pool of requests. For the second
dataset, requests are sampled to ensure a proper mix
of various trip distances, and for the third dataset, re-
quests are sampled so that they form a specific pattern.
The exact details of how the requests are chosen are
mentioned before presenting the results for the corre-
sponding scenarios. As mentioned, for each dataset,
two values are used for the number of requests sam-
pled, 500 and 1000. The simulation results are shown
on these three datasets separately, which we refer to as
Scenario 1, Scenario 2, and Scenario 3. It may also be
noted that the results with the optimization of routing
idle EVs included is shown for Scenario 3 only, as for
the first two scenarios, it does not provide much ben-
efit due to the absence of any specific request/demand
pattern. All four algorithms are run on each of the
three scenarios. All results reported are the average
Routing and Charge Planning Strategies for Ridesharing EV Fleets
81
over 10 runs.
The following metrics are measured to evalu-
ate the performance of the proposed algorithm: the
number of requests served, average waiting time per
served request, average extra distance travelled per
EV, and average time spent charging per EV. The first
three metrics have been mentioned earlier to be ob-
jectives of interest. We also measure the average time
spent charging per EV, as this parameter is important
for maintaining EV availability and reducing down-
time.
5.1 An Upper Bound for the Number of
Requests Served
In order to get an estimate of how well the proposed
algorithms perform, we try to calculate a loose upper
bound on the number of requests that can be served
by all the EVs for comparison. We first calculate the
maximum total distance all EVs could travel had they
been continuously moving. The trips (requests) are
then sorted in non-decreasing order of their trip dis-
tance (distance between pickup and dropoff). The re-
quests are served in this order until the maximum total
distance is exceeded or all requests have been served.
This calculation does not consider the waiting time
for a request (basically, the maximum waiting time
allowed is taken as infinite), ignores the actual order-
ing of the requests, and also does not consider the dis-
tances involved in going to charging stations. How-
ever, it takes into account an important component of
the total travel distance – moving from the dropoff lo-
cation of the last request to the pickup location of the
next request. This is approximated using the median
dropoff-pickup distance of all dropoff-pickup pairs.
Experimentally, too, the actual value comes to be very
close to this. Since the requests are considered in
non-decreasing order of trip distance, we call this the
Shortest Trip First (STF) bound.
To see why the STF bound is an upper bound for
the number of requests served, we note that the bound
firstly removes all restrictions on serving a request,
such as the restriction on maximum waiting time, so
all requests are eligible to be served. Secondly, the
actual request arrival times are ignored, thereby elim-
inating the times an EV has to wait for requests to
arrive, and they can continuously serve requests. Fi-
nally, the idea that serving requests in increasing or-
der of their trip times is always at least as good as any
other ordering of the requests is fairly common in the
realm of greedy algorithms, and can be proved using
a simple exchange argument.
In all of the three scenarios next, in the plot for the
percentage of requests served, we also show the STF
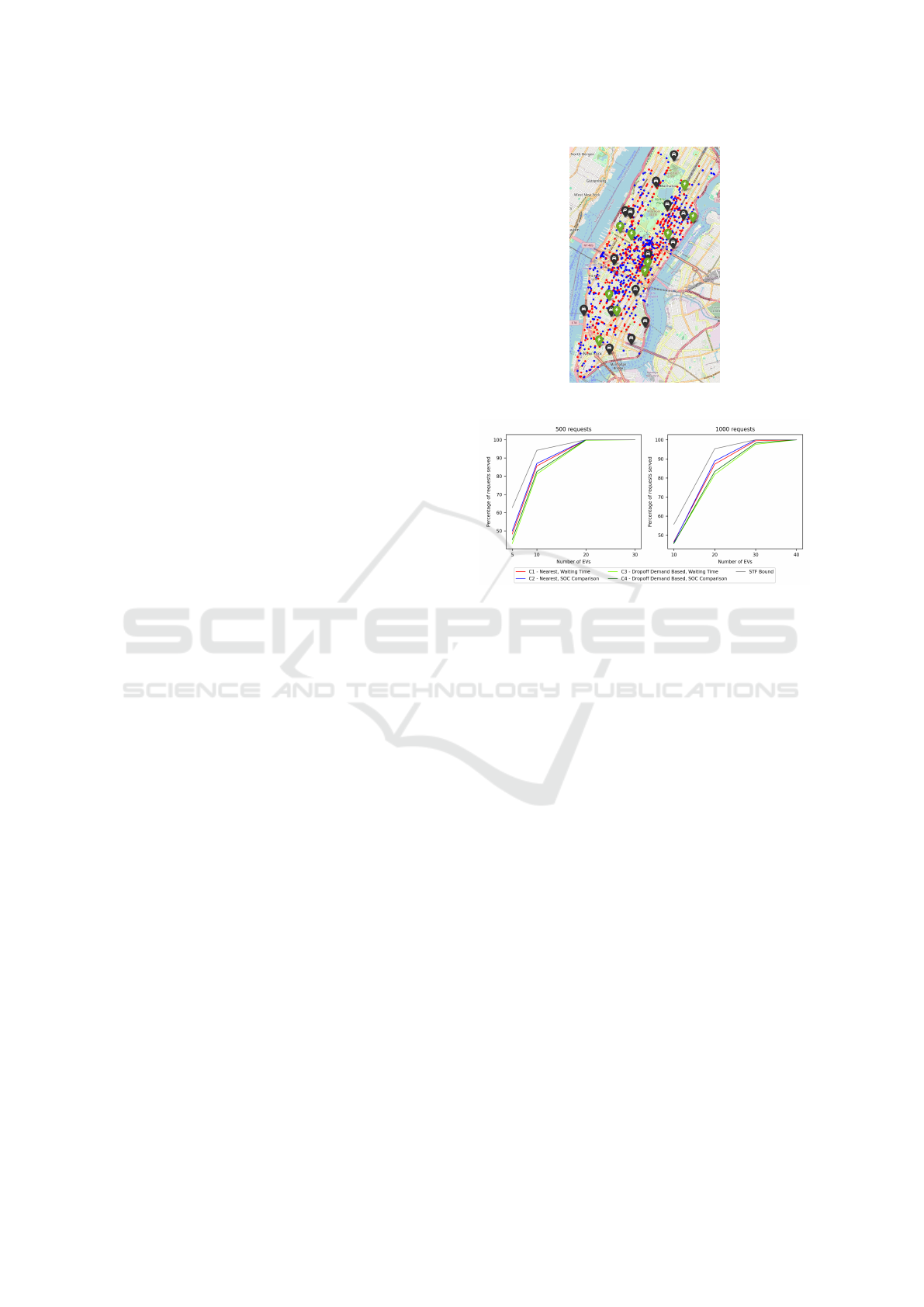
Figure 1: Request Pattern for Scenario 1.
Figure 2: Percentage of requests served.
bound value in gray color.
5.2 Scenario 1 - Uniform Sampling
In this case, 500 and 1000 requests are sampled uni-
formly from the entire set of requests on the speci-
fied day, between 7 a.m. and 7 p.m. Sampling re-
quests uniformly maintains the same proportion of re-
quests according to the distance between the pickup
and dropoff location, as in the original dataset. It is
seen that around 88% of the requests chosen have a
trip distance of less than 5 km, 10% of the requests
have a trip distance in the range of 5 to 10 km, and
the rest 2% have a trip distance of more than 10 km.
The request pattern is shown on the map in Fig.
1. Red dots represent pickup locations, and blue dots
represent dropoff locations. The green icons with the
lightning signs denote charging stations, and the black
icons with the cars show the initial position of the
EVs.
Fig. 2 shows the variation in the percentage of re-
quests served with the number of EVs. It is observed
that in both cases, the number of requests served in-
creases with the number of EVs as expected. There
is no significant difference in the number of requests
served between the four algorithms, though it can be
seen that Algorithm C2 has the highest number of re-
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
82
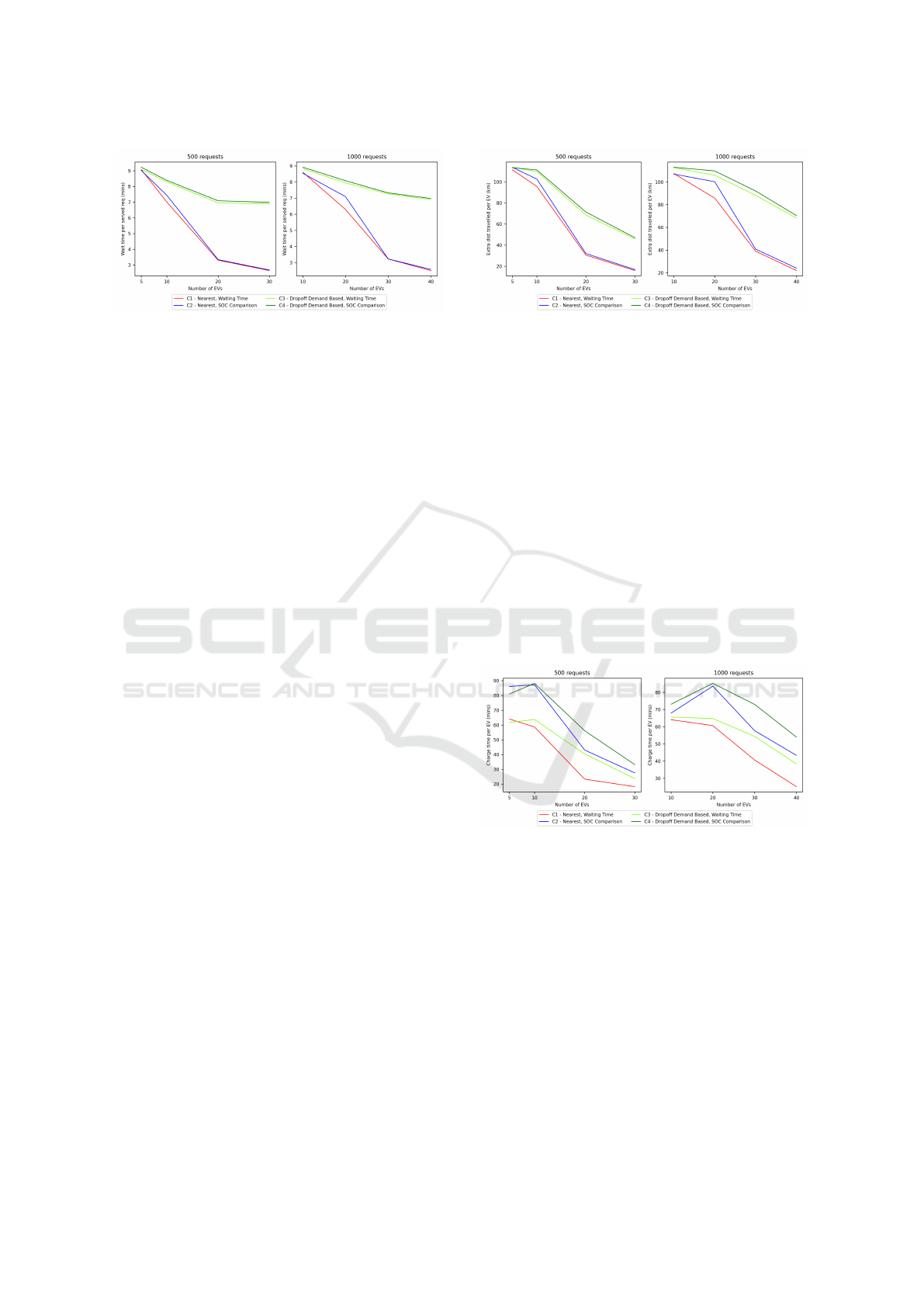
Figure 3: Waiting time per served request.
quests served, followed by C1, C4, and C3 in that or-
der. This shows that the algorithms with SOC com-
parison based charging policy perform better, com-
pared to their waiting time based counterparts. This
is likely because when there are sufficient number of
EVs for serving requests, idle EVs who have other
EVs in its neighborhood with higher SOC can go for
charging and be better prepared for serving other re-
quests in future. It is also seen that the demand based
EV assignment policy performs slightly worse be-
cause in this dataset used, the demand at all locations
is more or less uniform, and there is no specific pat-
tern in the requests. In comparison to the STF bound,
it is seen that with 500 requests, the best algorithm
falls short of the STF bound by around 12% with 5
EVs and by around 7% with 10 EVs. With 1000 re-
quests, the best algorithm falls short of the STF bound
by around 9% with 10 EVs and by around 7% with 20
EVs. Considering the number of assumptions and re-
laxations made while calculating the bound, it can be
argued that the proposed algorithms perform consid-
erably well.
Fig. 3 shows the variation in the average waiting
time per served request with the number of EVs. It
is seen that for both the algorithms with the nearest
EV assignment strategy, the waiting time decreases
rapidly with an increase in the number of EVs. With
more EVs available, the average distance between a
vehicle and a passenger requesting a ride is likely to
decrease, which would lead to a decrease in the wait-
ing time of the passenger. Also, the waiting time of
the algorithms with the demand based EV assignment
policy is higher, compared to the algorithms with the
nearest EV assignment scheme. This arises for the ob-
vious reason that in the nearest EV scheme, the near-
est EV is sent for a passenger request, and so, obvi-
ously the waiting time would have been more if any
other EV was sent.
Figure 4: Extra distance travelled per EV.
Fig. 4 shows the variation in the extra distance
travelled per EV with the number of EVs. It can be
seen that the extra distance travelled by EVs is higher
for the algorithms with the demand based EV assign-
ment scheme, compared to the nearest EV assignment
scheme. This is understandable as the EV being sent
to a pickup location has to travel more in this case,
compared to the case if the nearest EV was sent. Also,
the extra distance travelled in the case of the algo-
rithms with the SOC comparison based charging pol-
icy is slightly higher than those with the waiting time
based charging policy. This is because, in the former
scheme, the EVs go for charging more frequently as it
has less strict conditions for an EV to go for charging.
Thus, the distance travelled while reaching the charg-
ing station adds to the extra distance travelled in this
case.
Figure 5: Time spent charging per EV.
Fig. 5 shows the variation in the time spent charg-
ing per EV with the number of EVs. We can observe
that the average charging time per EV for the wait-
ing time based charging policy decreases with an in-
crease in the number of EVs. With more EVs, the
load on each EV decreases, thus the SOC of EVs de-
creases slowly, and the EVs do not need to charge as
frequently as they would have to had the load on each
EV been high. However, for the SOC comparison
based charging policy, there is a small spike when the
number of EVs increases from 5 to 10 in case of 500
requests and from 10 to 20 in case of 1000 requests.
This is because now, for each EV, there are possibly
more EVs with a higher SOC in its neighborhood,
Routing and Charge Planning Strategies for Ridesharing EV Fleets
83
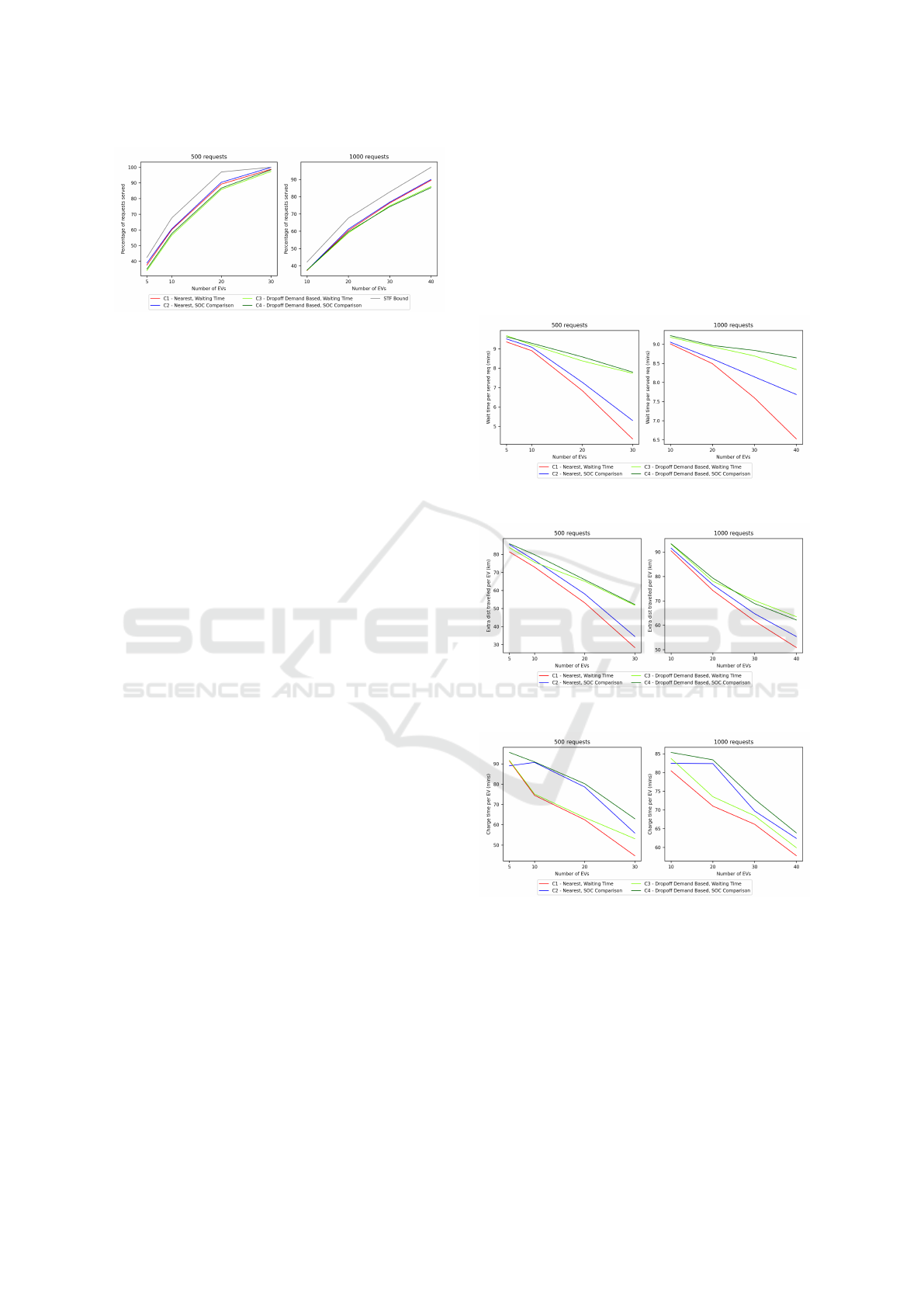
Figure 6: Percentage of requests served.
thus leading to the charging conditions being fulfilled
more often, leading to higher charge time. It then de-
creases again because the number of EVs becomes
a more dominant factor compared to the increased
charging time. Also, with more requests, the charg-
ing time increases, as with more load on the system,
each EV serves more requests and loses charge faster,
hence needing to charge more frequently. Another
important observation is that the time spent charg-
ing is higher for algorithms with the SOC comparison
based charging policy. With a higher number of EVs,
more often than not, EVs have other EVs near them,
and the waiting time in the SOC comparison policy
is lower than that in the waiting time policy. So, the
conditions to decide whether to go for charging be-
come less strict in the SOC comparison based policy,
leading to a higher time spent charging by the EVs.
5.3 Scenario 2 - Sampling Based on Trip
Distance
In this case, we sample the requests such that 1/3
rd
of
the requests have their trip distance (distance between
pickup and dropoff) less than 5 km, another 1/3
rd
of
the requests have their trip distance between 5 and 10
km, and the remaining 1/3
rd
of the requests have their
trip distance greater than 10 km. Thus the trip dis-
tances are more widely distributed, and also allows
for evaluating the performance when there are more
number of longer trips.
Fig. 6 shows the variation in the percentage of
requests served with the number of EVs. As ex-
pected, the percentage of requests served increases
with an increase in the number of EVs for all the al-
gorithms. The algorithms with the SOC comparison
based charging policy perform slightly better, as in
this case there are more trips with longer distances,
causing them to run out of charge and go for charging
more often. This makes them better prepared for ac-
cepting future requests with long trip distances. For
both 500 and 1000 requests, the best algorithm falls
short of the STF bound by 3-7% only depending on
the number of EVs, showing that the proposed algo-
rithms perform quite well.
Fig. 7, Fig. 8, and Fig. 9 show the variation in
average waiting time per served request, average ex-
tra distance travelled per EV, and average time spent
charging per EV respectively with the number of EVs.
The trends observed here are similar to that of the pre-
vious scenario, for similar reasons as explained ear-
lier.
Figure 7: Waiting time per served request.
Figure 8: Extra distance travelled per EV.
Figure 9: Time spent charging per EV.
5.4 Scenario 3 - Sampling Based on
Pickup Location
In this scenario, we choose a 6 km
2
area at the centre
of Manhattan, and sample requests such that 70% of
requests have their pickup location inside this desig-
nated area, and the rest 30% have their pickups out-
side this designated area. Often, in the real world, it
happens that for particular times of a day, there is one
area where traffic is concentrated (for example, the
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
84
downtown area of a city), and most people request
rides starting from that area. The request sampling
attempts to model this scenario where demand is con-
centrated more in certain areas.
For this scenario, we also perform additional sim-
ulations with the optimization of routing idle EVs en-
abled. However, due to space constraint, we report
results with the optimization enabled only for the best
performing strategy (C4 - Dropoff Demand Based and
SOC Comparison).
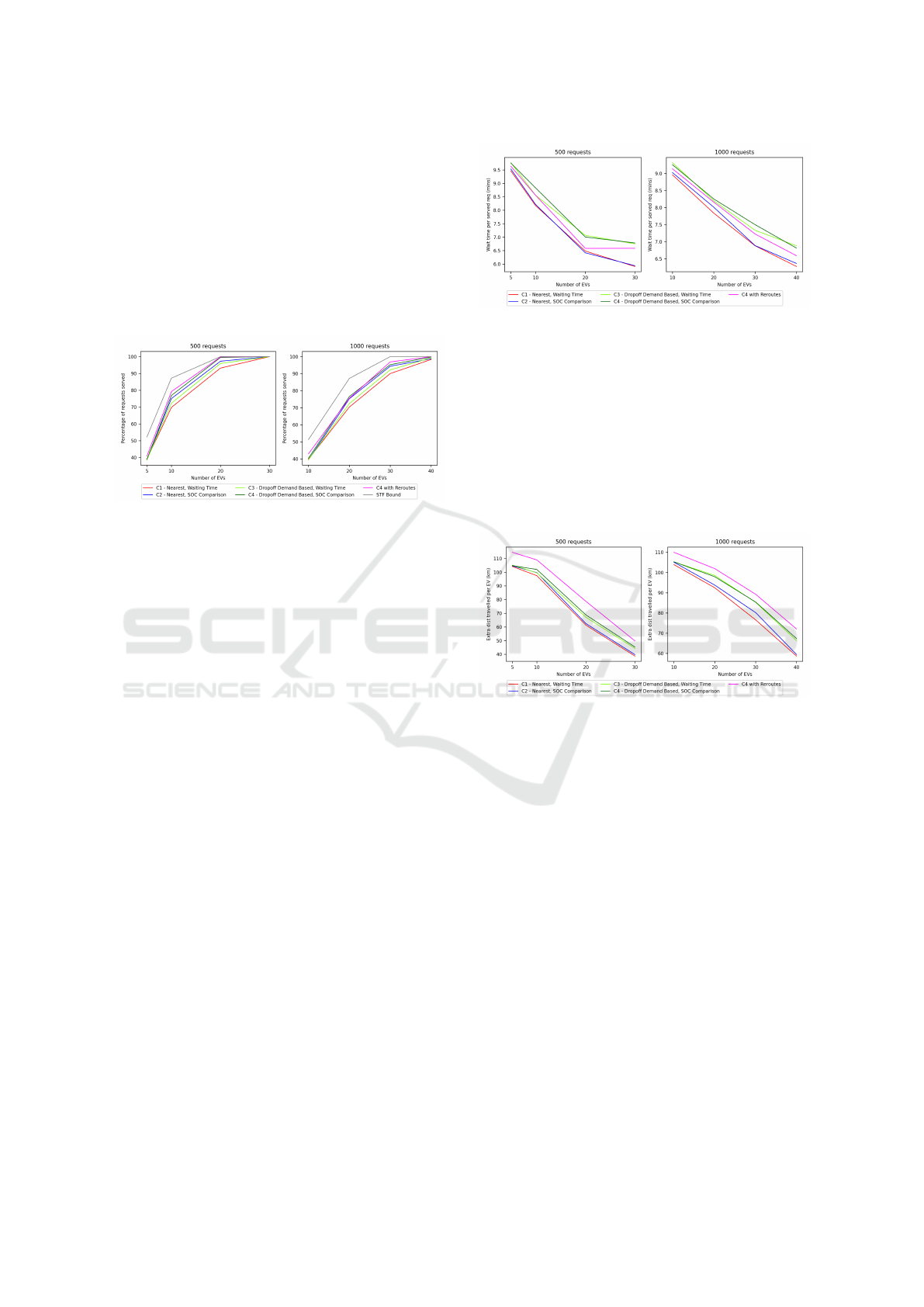
Figure 10: Percentage of requests served.
Fig. 10 shows the variation in the percentage of
requests served with the number of EVs. It can be
seen that in this case, C4 performs the best, followed
by C2, C3, and C1 in that order. We also observe that
C4, with the optimization of routing idle EVs to ar-
eas of high demand, gives a 2-3% boost, compared
to C4 without it. This is expected as the demand is
mostly concentrated in one region in this case, and
hence routing EVs back to the area of the city where
there is higher demand helps in serving more requests.
It is seen that the strategies with the demand based
EV assignment perform better than their nearest EV
counterparts, because there is a very distinct demand
pattern in the dataset in this case. Also, the SOC com-
parison based charging policy performs better as com-
pared to the waiting time based policy as more of-
ten than not, after dropping off a passenger, the EV
will not get another request near that dropoff loca-
tion, because the pickups are mostly concentrated in
one area. So, they will need to travel some extra dis-
tance to go back to the location with more requests to
serve the next request. Since with the SOC compar-
ison based policy, EVs go for charging more often,
fewer requests are rejected because of the EVs hav-
ing insufficient SOC to reach a pickup location that is
far, thus leading to more requests being served. With
500 and 1000 requests, the best algorithm falls short
of the STF bound by 11-14% and 5-11% respectively,
depending on the number of EVs. This again shows
that the proposed algorithms perform quite well in
this scenario also.
Figure 11: Waiting time per served request.
Fig. 11 shows the variation in the waiting time per
served request with the number of EVs. It is again ob-
served that the waiting time decreases rapidly with an
increase in the number of EVs. Also, comparing be-
tween C4 with and without the optimization enabled,
we see that the average waiting time for served re-
quests decreases on routing the idle EVs. Routing idle
EVs to areas with high demand allows requests to find
an EV both fast and close to the pickup location, thus
leading to a reduction in the waiting time.
Figure 12: Extra distance travelled per EV.
Fig. 12 shows the variation in the extra distance
travelled per EV with the number of EVs. Similar
to the previous two scenarios, the extra distance trav-
elled by EVs is higher for the algorithms with the de-
mand based EV assignment scheme, compared to the
nearest EV assignment scheme, as EVs have to travel
more to reach the pickup location in this case. Also,
the extra distance travelled by EVs increases on rout-
ing the idle EVs. This is understandable as now the
EVs are moving from their location to locations with
higher demand, thus contributing to the extra distance
travelled.
Routing and Charge Planning Strategies for Ridesharing EV Fleets
85

Figure 13: Time spent charging per EV.
Fig. 13 shows the variation in the time spent
charging per EV with the number of EVs. Again, it
can be seen that the average charging time per EV
decreases with an increase in the number of EVs as
expected. Also, time spent charging is higher when
we route the idle EVs because now they have to travel
more, leading to them running out of charge faster and
more frequently, thus leading to more frequent charg-
ing.
6 CONCLUSION
In this paper, we have addressed the problem of man-
agement of an EV fleet for ridesharing to satisfy pas-
senger requests. We presented a set of four algorithms
for the problem and presented detailed simulation re-
sults on a real world dataset to show that the algo-
rithms perform well. The work can be further ex-
tended by considering other objective functions such
as operator profit, passenger’s ride cost etc., and the
use of a set of mobile charging stations owned by the
fleet operator for EV charging to reduce operator cost.
REFERENCES
Chen, T., Zhang, B., Pourbabak, H., Kavousi-Fard, A.,
and Su, W. (2018). Optimal routing and charging of
an electric vehicle fleet for high-efficiency dynamic
transit systems. IEEE Transactions on Smart Grid,
9(4):3563–3572.
Chen, T. D., Kockelman, K. M., and Hanna, J. P. (2016).
Operations of a shared, autonomous, electric vehicle
fleet: Implications of vehicle & charging infrastruc-
ture decisions. Transportation Research Part A: Pol-
icy and Practice, 94:243–254.
Donovan, B. and Work, D. (2016). New
york city taxi trip data (2010-2013).
https://doi.org/10.13012/J8PN93H8.
Guo, G. and Xu, Y. (2022). A deep reinforcement learn-
ing approach to ride-sharing vehicle dispatching in au-
tonomous mobility-on-demand systems. IEEE Intel-
ligent Transportation Systems Magazine, 14(1):128–
140.
Guo, Z., Hao, M., Yu, B., and Yao, B. (2021). Robust
minimum fleet problem for autonomous and human-
driven vehicles in on-demand ride services consider-
ing mixed operation zones. Transportation Research
Part C: Emerging Technologies, 132:103390.
Hua, Y., Zhao, D., Wang, X., and Li, X. (2019). Joint in-
frastructure planning and fleet management for one-
way electric car sharing under time-varying uncertain
demand. Transportation Research Part B: Method-
ological, 128:185–206.
H
¨
all, C., Ceder, A., Ekstr
¨
om, J., and Quttineh, N.-H. (2018).
Adjustments of public transit operations planning pro-
cess for the use of electric buses. Journal of Intelligent
Transportation Systems, 23:1–15.
Kullman, N. D., Cousineau, M., Goodson, J. C., and Men-
doza, J. E. (2022). Dynamic ride-hailing with electric
vehicles. Transportation Science, 56(3):775–794.
Lin, B., Ghaddar, B., and Nathwani, J. (2021). Electric
vehicle routing with charging/discharging under time-
variant electricity prices. Transportation Research
Part C: Emerging Technologies, 130:103285.
Lin, K., Zhao, R., Xu, Z., and Zhou, J. (2018). Efficient
large-scale fleet management via multi-agent deep re-
inforcement learning. In 24th ACM SIGKDD Interna-
tional Conference on Knowledge Discovery & Data
Mining, page 1774–1783.
Lu, J.-L., Yeh, M.-Y., Hsu, Y.-C., Yang, S.-N., Gan, C.-H.,
and Chen, M.-S. (2012). Operating electric taxi fleets:
A new dispatching strategy with charging plans. In
2012 IEEE International Electric Vehicle Conference,
pages 1–8.
Ma, T.-Y. and Fang, Y. (2022). Survey of charging man-
agement and infrastructure planning for electrified
demand-responsive transport systems: Methodologies
and recent developments. European Transport Re-
search Review, 14.
Ma, T.-Y. and Xie, S. (2021). Optimal fast charging sta-
tion locations for electric ridesharing with vehicle-
charging station assignment. Transportation Research
Part D: Transport and Environment, 90:102682.
Mor, A. and Speranza, M. (2020). Vehicle routing problems
over time: a survey. 4OR, 18.
Nissan (2023). Nissan leaf features.
https://www.nissanusa.com/vehicles/electric-
cars/leaf/features.html.
Schiffer, M. and Walther, G. (2017). The electric loca-
tion routing problem with time windows and partial
recharging. European Journal of Operational Re-
search, 260(3):995–1013.
Schiffer, M. and Walther, G. (2018). Strategic planning
of electric logistics fleet networks: A robust location-
routing approach. Omega, 80:31–42.
Shehadeh, K. S., Wang, H., and Zhang, P. (2021). Fleet
sizing and allocation for on-demand last-mile trans-
portation systems. Transportation Research Part C:
Emerging Technologies, 132:103387.
Shi, J., Gao, Y., Wang, W., Yu, N., and Ioannou, P. A.
(2020). Operating electric vehicle fleet for ride-
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
86

hailing services with reinforcement learning. IEEE
Transactions on Intelligent Transportation Systems,
21(11):4822–4834.
Stumpe, M., R
¨
oßler, D., Schryen, G., and Kliewer, N.
(2021). Study on sensitivity of electric bus systems
under simultaneous optimization of charging infras-
tructure and vehicle schedules. EURO Journal on
Transportation and Logistics, 10:100049.
Wang, Y., Bi, J., Guan, W., and Zhao, X. (2018). Opti-
mising route choices for the travelling and charging of
battery electric vehicles by considering multiple ob-
jectives. Transportation Research Part D: Transport
and Environment, 64:246–261.
Wu, X., Feng, Q., Bai, C., Lai, C. S., Jia, Y., and Lai, L. L.
(2021). A novel fast-charging stations locational plan-
ning model for electric bus transit system. Energy,
224:120106.
Yu, G., Liu, A., Zhang, J., and Sun, H. (2021). Opti-
mal operations planning of electric autonomous ve-
hicles via asynchronous learning in ride-hailing sys-
tems. Omega, 103:102448.
Zalesak, M. and Samaranayake, S. (2021). Real time op-
eration of high-capacity electric vehicle ridesharing
fleets. Transportation Research Part C: Emerging
Technologies, 133:103413.
Zhang, H., Sheppard, C. J. R., Lipman, T. E., and Moura,
S. J. (2020). Joint fleet sizing and charging sys-
tem planning for autonomous electric vehicles. IEEE
Transactions on Intelligent Transportation Systems,
21(11):4725–4738.
Routing and Charge Planning Strategies for Ridesharing EV Fleets
87
