
Comparison of Parametrization Approaches for Scenario-Based Testing
Christoph Glasmacher
a
, Marcel Sonntag
b
and Lutz Eckstein
Institute for Automotive Engineering, RWTH Aachen University, Steinbachstraße 7, Aachen, Germany
Keywords:
Scenario, Testing, Parametrization, Simulation, Automated Driving.
Abstract:
Scenario-based testing is a promising approach to assess and assure the safety of automated and connected
driving functions. In this approach, test scenarios are often described in an abstract way. Norms sometimes
even provide certain parameter values for, e.g., approaching maneuvers in lane-keeping situations. However,
the type of parametrization is often not fully specified - neither in databases nor in regulations. This paper
assesses differences in possible types of parametrizations for test scenarios and gives guidance about the im-
portance to choose a suitable parametrization for individual use cases. For this, different parametrization types
are categorized. The effects on the outcome of tests are investigated in a comprehensive study simulating
435,456 test cases in the CARLA simulator. Thereby, 8 different systems under test are investigated to ob-
serve the outcome on different parametrizations on intersections. The results show a high influence of the
parametrizations for different systems under test on the test outcomes leading to the need for carefully select-
ing a suitable parametrization approach.
1 INTRODUCTION
Due to technological advancements in machine learn-
ing and sensor systems, the development of auto-
mated driving systems (ADSs) sped up and first appli-
cations are introduced to the market (Mercedes-Benz
AG, 2024; Waymo LLC, 2024). For the introduction
and extension of them, it is required by regulatory
bodies to assess the safety of ADSs before market in-
troduction (UNECE, 2021). To cope with the com-
plexity of today’s traffic, scenario-based approaches
such as (PEGASUS Project Consortium, 2019) or
(Galbas et al., 2022) have emerged in recent years to
facilitate those safety analyzes. Scenario-based ap-
proaches also made it into standardization (Interna-
tional Organization for Standardization, 2022a) and
legislation (UNECE, 2021). Within scenario-based
testing, one goal is to derive the suitable scenarios
to represent the related operational design domain
(ODD) for a given use case or application (e.g., mo-
torway chauffeur) as realistically and completely as
possible. Based on those scenarios, ADSs are to be
tested in simulation as well as in real-world condi-
tions.
Substantial research has been performed on iden-
tifying and systematizing these scenarios (or scenario
a
https://orcid.org/0000-0003-4826-9706
b
https://orcid.org/0009-0003-1247-1782
categories) to represent the ODD (Weber et al., 2023a;
de Gelder et al., 2022). Using these scenarios for
testing purposes requires defining models represent-
ing them. Usually, these models consist of parame-
ters defining characteristics, such as the starting con-
ditions of actors involved. To generate concrete or
logical scenarios, parameter values or ranges are as-
signed to these models. Research has also been per-
formed on parameter value assignment (Glasmacher
et al., 2023b). However, there is no common ground
on how to define the models representing the scenar-
ios, e.g., in simulations to achieve meaningful out-
comes. In other words, there is no common ground
in which way and with which parameters (not the val-
ues of them) should define the scenarios for testing
to allow deriving valid conclusions for the specified
test case. This task is called scenario parametriza-
tion. Standards like OpenSCENRIO XML (ASAM
e.V., 2024) define a common language for scenario
modelling for simulations, but no guidance is given
on how to do the parametrization, i.e., how to define
the scenario elements in detail to, e.g., define dynamic
objects in the surrounding of the system under test
(SuT). One recent study (de Gelder and Camp, 2024)
provides first analyzes on this topic, considering dif-
ferent levels of detail of scenario parametrization of
those objects. This is analyzed for scenarios in longi-
tudinal traffic. However, different degrees of reactiv-
Glasmacher, C., Sonntag, M. and Eckstein, L.
Comparison of Parametrization Approaches for Scenario-Based Testing.
DOI: 10.5220/0013282200003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 439-447
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
439

ity of those objects or the general availability to react
are not analyzed. The dynamic objects could be de-
fined, e.g., using fixed trajectories or arbitrarily com-
plex driver models. The influence of these types of
parametrizations remains unclear in simulation out-
comes.
In this work, we systematically define and cate-
gorize relevant terms and representations for scenario
parametrization (see Section 3). Based on this cat-
egorization, three different scenario parametrizations
of the same scenario are set up for testing in simula-
tion, considering different degrees of reactivity of the
dynamic objects in the surrounding of the SuT (see
Section 4). Those parametrizations are analyzed by
conducting an extensive experiment. The three dif-
ferent parametrizations combined with four different
implementations of an SuT behavior as well as param-
eter values sampled from defined parameter ranges
result in more than 400,000 simulated cases. This
allows an extensive analysis of the influence of the
parametrizations on simulation outcomes under vary-
ing conditions. The results (see Section 5) show that
the choice of the scenario parametrization has signif-
icant influence on the test results with respect to the
number and characteristics of the resulting collisions.
Based on this, guidance is given on how to select a
suitable scenario parametrization for the intended use
(see Section 6).
2 STATE OF THE ART
In recent years, several publications on scenario-
based testing have been made, applying the developed
concepts to different use cases for scenarios. In order
to structure this first, an overview of some of these
various use cases is provided. Based on this, a de-
tailed look is taken at their parametrization and the
differences are elaborated.
2.1 Scenario-Based Testing and
Applications
Due to the high complexity of today’s traffic, regu-
lar testing approaches solely based on on-road test-
ing are not applicable for testing ADSs, as the re-
quired mileage to be able to derive valid conclusions
is within an unreasonable order of magnitude (Winner
et al., 2018). Thus, scenario based approaches were
introduced to enable a more systematic way for test-
ing relevant situations (PEGASUS Project Consor-
tium, 2019). A scenario, as defined in ISO 34501 (In-
ternational Organization for Standardization, 2022b),
is a sequence of scenes usually including the au-
tomated driving system(s) / subject vehicle(s), and
its/their interactions in the process of performing the
dynamic driving task (DDT).
While the term scenario is rather well-defined, the
process of parametrization of scenarios is not defined
precisely, leading to inconsistent use. Some use the
term for the process of selecting specific parameter
values from given ranges to come to concrete scenar-
ios (Bach et al., 2016). Others are using the term for
the process of identifying parameters that represent
the desired scenarios in a meaningful way (de Gelder
and Camp, 2024).
2.2 Different Parametrizations
When defining scenarios for simulation, models for
the actors involved are to be defined to model their
individual behavior. These models can have varying
complexity, leading to different parameters that are to
be defined. This is an important part of the scenario
parametrization.
The most common standard for defining scenar-
ios for simulations is the ASAM OpenSCENARIO
XML standard (ASAM e.V., 2024). It allows differ-
ent ways for the representation of the actors’ behavior.
First, fixed trajectories can be used defining dynamic
states of the actors at consecutive positions over time.
Second, behavior can be defined using predefined ac-
tions and triggers, allowing actors to react to defined
circumstances and interactions. Third, custom con-
trollers can be specified to model further interactions.
Those different possibilities lead to the need for se-
lecting an appropriate approach for the desired use,
which might require different models for defining the
actors’ behaviors.
Within the V4SAFETY project, for the purpose of
prospective safety impact assessment, different cate-
gories of models based on the actors’ reactivity have
been defined (Fahrenkrog et al., 2024). Within the de-
fined baseline generation approaches, one can either
use pre-simulation or in-simulation approaches. For
the former, the characteristics of the object’s trajec-
tory are defined before the simulation is started. For
the latter, the trajectories are defined during the sim-
ulation based on the actual interactions. Triggers and
actions might define this behavior. This implies that
different approaches require different parametriza-
tions of scenarios, leading to the need of defining dif-
ferent parameters.
In addition, different levels of detail of modelling
objects’ behavior can be considered. Within the study
of (de Gelder and Camp, 2024), the influence of this
on simulation results is analyzed for the scenarios de-
fined in the regulation UN ECE R157 (UNECE, 2021)
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
440

focussing on longitudinal traffic. This includes, e.g.,
different ways of parametrizing lane changes within
cut-in scenarios. A substantial influence of the differ-
ent parametrization approaches on the test outcomes
is shown. Though, the general influence of different
parametrizations, e.g., considering objects’ reactivity,
is not discussed in current research.
This stresses the need of further investigating
the influence of different scenario parametrizations
to give guidance on how to select appropriate ap-
proaches.
3 DEFINITION AND
CATEGORIZATION OF
PARAMETRIZATIONS
Section 2.2 shows that scenarios are often described
in different ways. In order to systematize different
types, definitions are first discussed. Based on these,
different categories of scenario parametrization are
used to describe them.
3.1 Definitions
Although terms such as “parameter” or abstraction
levels for scenarios are frequently used in ISO doc-
uments (International Organization for Standardiza-
tion, 2022b), the level of detail leaves space for mis-
interpretation in the following methodology. To avoid
this, definitions are set up for the task of parametriza-
tion in the same manner as for the distinction of types
of logical scenarios as in (Glasmacher et al., 2023a):
• Scenario Parameter: Scenario parameters are el-
ements of a logical or concrete scenario which
quantify its characteristics (incl. involved actors).
• Scenario Parametrization: Process of modeling
a logical scenario with a set of parameters without
assigning concrete values, ranges or distributions.
• Scenario Parameter Value Assignment: Param-
eter value assignment describes the assignment of
values, ranges or distributions to predefined sce-
nario parameters.
Using an analogy with mathematics, parametriza-
tion opens up the vector space that may be designed to
represent the real world. The assignment of the values
or ranges then only sets a point or a body in the (high-
dimensional) spanned space, which then represents a
concrete or logical scenario.
3.2 Categorization of Parametrization
Approaches
Scenarios are described differently in the literature
depending on the use case. In the context of this
paper, categories for the parametrization of scenar-
ios that contain parameters are of particular interest.
We distinguish among three categories for scenario
parametrization: level of abstraction, degree of reac-
tivity, and type of description language.
The category of abstraction levels is traditionally
used frequently and encompasses the level of detail.
Common levels are functional, abstract, logical and
concrete. As the level of detail increases with lower
abstraction level, information must be added to make
the description complete.
We define reactivity as the interactivity of the sce-
nario elements to actions of the system under test. If a
scenario consists exclusively of predefined elements,
there is no reactivity of the scenario elements and the
control loop of action and reaction of the scenario el-
ements is not closed in the simulation. Thus, it is e.g.
a direct replay of a recorded scenario. On the other
side of the spectrum, all scenario elements would re-
act to actions of the ego over the entire time span of
the scenario. This is the case for road users, for exam-
ple, if they continuously adjust to the ego’s behavior
and adapt their own behavior. Further gradations are
possible between these two extremes.
The last category is the description language.
Based on the selected parameters, the reactivity and
the resulting level of abstraction, this can be selected
to allow an (machine readable) interpretation of the
scenario. Scenario description languages such as
ASAM OpenScenario XML/ DSL or proprietary de-
scriptions define those languages.
4 EXPERIMENT
The influence of different parametrization approaches
on a simulation result is assessed within an experi-
ment to investigate whether there is a relevant influ-
ence on the outcome of a potential assessment of a
SuT focussing on the aspect of reactivity. In the ex-
periment, a total of 435,456 scenarios are generated,
simulated and evaluated to evaluate the influence of a
wide range of combinations within and between dif-
ferent parametrization approaches. Within those sce-
narios, aspects with potentially high influence on the
simulation result as the parametrization approach, un-
derlying parameters and the system under test are var-
ied for a comprehensive assessment. After setting up
the scenarios (Section 4.1) and SuTs (Section 4.2),
Comparison of Parametrization Approaches for Scenario-Based Testing
441
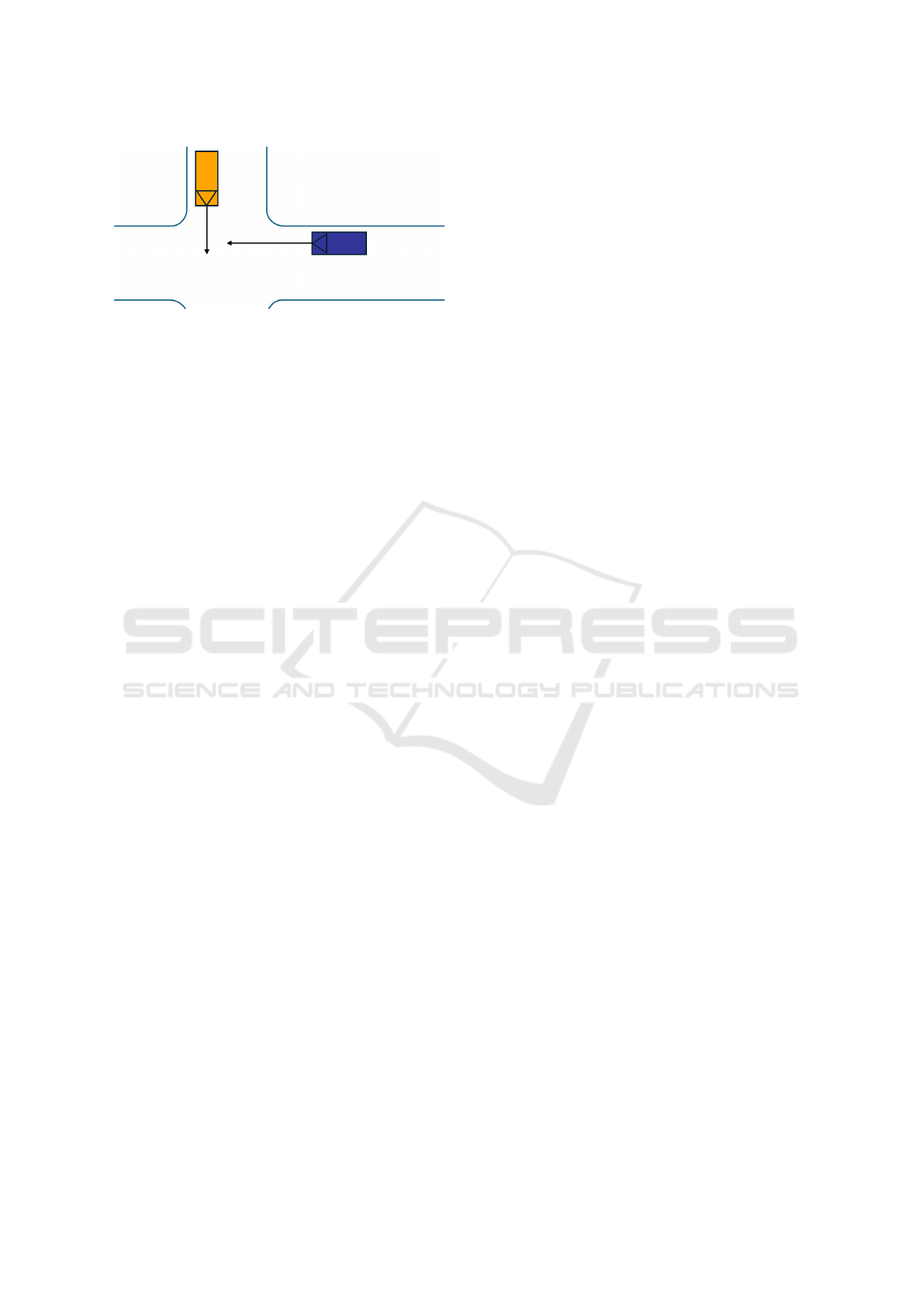
Figure 1: Constellation of ego road user (blue) and conflict-
ing road user (orange).
each system under test is confronted with the scenar-
ios using the simulation platform CARLOS (Geller
et al., 2024) which is based on the CARLA simulator.
They are assessed based on crashes and impact speeds
since those are some of the most common metrics for
assessing safety.
4.1 Scenario Parametrization and
Parameter Value Assignment
Assessing a scenario with multiple characteristics can
become a high dimensional problem. This increases
even more if multiple parametrization approaches and
different SuTs should be assessed. To limit this com-
plexity, one specific abstract scenario is chosen. We
decided to assess the scenario ego passing straight
with intersecting object from right passing straight
according to (Weber et al., 2023b) due to the high
relevance in recent assessments. It is designed with
vehicles for both road users, but since the models
don’t account for this difference, conclusions should
be equally valid for other road user types such as
VRUs or other situations (e.g. including occlusions).
The scenario is applied to the four-arm intersection
Frankenburg of the inD dataset (Bock et al., 2020).
The constellation is shown in Figure 1.
According to Section 3.2 numerous possible
parametrizations exist. The focus of this experiment
is to investigate the influence of different reactivi-
ties within the defined scenario. Thus, three differ-
ent parametrizations for the conflicting road user (ob-
ject) in the same abstract scenario are set up accord-
ing to the reactivity. The focus of this experiment is
on the object’s velocity (-profile) while keeping the
same path:
• Constant Velocity: As a representative of the
fixed trajectory approach, the object is modeled
with a constant velocity not reacting to the behav-
ior of the ego vehicle.
• Synchronization: For this approach, the behav-
ior can be subdivided into two phases: before and
after a locally fixed synchronization point for the
object. Before this point, the object tries to pro-
voke a collision (PL = 0) with the ego by acceler-
ating or decelerating. After synchronization, the
velocity does not change anymore. Thus, reactiv-
ity of the object is given to a certain point.
• Adaptive Function: This approach is compara-
ble to the synchronization approach, but always
tries to create a collision under given acceleration
constraints without stopping this synchronization
at a certain point. This reflects the highest degree
of reactivity.
These approaches are detailed by defining param-
eters and assigning parameter values. For the parame-
ter value assignment, initial conditions are set equally
for the different approaches in a realistic range for
intersections. Besides these, specific parameters are
set for the individual approaches if necessary (Ta-
ble 1). To enable a simple sampling approach while
still generating crashes easily and allowing compar-
isons, whenever possible, parameters are set in a way
that the actors reach the conflict after a defined time.
This means, for example, that the initial position is
calculated based on the sampled initial velocity in the
way, that the actor reaches the conflict area after a de-
fined timespan, taking the sampled priority level into
account.
The desired conflict is described with a predicted
priority level (PrPL). According to (Hu and Li, 2017)
this is defined in the interval [−1,1]. However, to de-
scribe also near misses, this is extended to [−1.5,1.5].
Using a uniform sampling, 6,804 concrete sce-
narios are created for the constant velocity approach,
20,412 for the synchronization approach and 27,216
for the adaptive approach. This sampling approach
ensures a good comparability between approaches
and does not include bias due to the parameter value
assignment.
4.2 Systems Under Test
The experiment is conducted with different SuTs, as
different characteristics of a SuT might lead to differ-
ent effects of parametrization approaches:
• No reaction (NR): As a baseline, this system un-
der test does not react on the object.
• Autonomous Emergency Braking System
(AEB): An AEB system is defined with a
time-to-collision (TTC) threshold (T TC < 1s)
and a distance headway (DHW) threshold
(DHW < 3m). Once one condition is reached, an
emergency breaking maneuver is performed.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
442
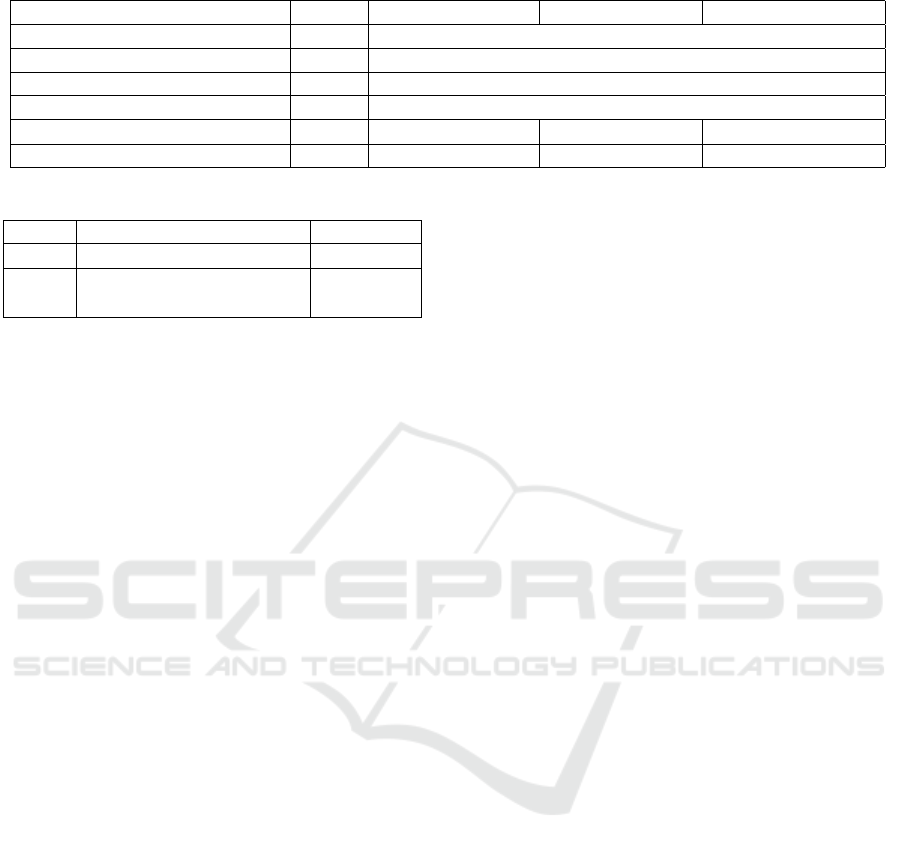
Table 1: Parameter ranges for experimental setup.
Parameter Unit Constant velocity Synchronization Adaptive Function
Predicted pre-crash time [s] [0.3, 5.0]
v
ego,init
[m/s] [3.0, 20.0]
v
ob ject,init
[m/s] [3.0, 20.0]
Predicted Priority Level [-] [-1.5, 1.5]
Max. acceleration [m/s
2
] - [9.81] [1.0, 9.81]
Synchronization time to conflict [s] - [0, 2.0] -
Table 2: Logic system under tests.
SuT Logic Acc.
AEB T TC<1.0s ∨ DHW <1.5m -9.81 m/s
2
Assist
PrPET <1.0 ∧ PrPL>1.1
PrPET <1.0 ∧ PrPL<1.1
2 m/s
2
-2 m/s
2
• Intersection Assist (As): An intersection as-
sist (Assist) does not only break, but acceler-
ates and decelerates based on the predicted post-
encroachment-time (PrPET) and a predicted pri-
ority level (PrPL, (Hu and Li, 2017)) with a
smaller acceleration/ deceleration to avoid a con-
flict (see Table 2).
• AEB and Assist (A-As): Both AEB and Assist
are used in combination. Once the AEB is acti-
vated, it overrides the Assist function.
For each SuT, two variants are set up to acknowl-
edge different approaching maneuvers for intersec-
tions. This is done by defining a target speed to
which the system under test decelerates when ap-
proaching the intersection. Such a behavior can re-
flect approaching an intersection on a minor or prior-
ity road. The approaching target speed is either set
to const meaning that it does not intent to reduce the
speed or to 3m/s for a more cautious approaching ma-
neuver when the SuT might need to yield. Taking the
number of different scenarios and the different SuTs
into account, 435,456 test cases are set up and simu-
lated in the CARLOS simulation environment.
5 RESULTS
According to the experiment description in Section 4,
the test cases created are evaluated a posteriori us-
ing various metrics. Whereas mainly results based on
accidents are shown in this section, analysis of vari-
ous TTX metrics such as TTC, THW, PET, but also
metrics with predictions such as PrPET and PrPL are
incorporated in the conclusion. However, due to the
limited space and similar statements, the focus within
the results is on collisions. For this purpose, the crash
ratio and collision speeds are primarily taken into ac-
count.
The influence of individual parameter values are
not analyzed below, but rather the influence of the
parametrization on the outcome of the scenario. Ac-
cordingly, the respective scenarios are not considered
individually, but the results are aggregated. The re-
sults are clustered in two sections: the influence of the
parametrization approach itself, and the influence of
certain parameters in combination with the approach.
5.1 Influence of Parametrization
The comparison of the different parametrizations
shows differences in the output of a simulation de-
pending on the parametrization approach and the SuT
used. These differences are not linear in each case,
they partly counteract each other and depend on indi-
vidual parameters (see Figure 2).
In order to assess the effects of different
parametrizations more deeply, a baseline is used as
the cases with the object road user with constant ve-
locity parametrization and with a SuT with no reac-
tion. Figure 2 shows for this baseline (two left blue
bars) that all generated cases with −1 < PL < 1 re-
produce a crash and according to the definition for
PL = −1.5 and PL = 1.5 no crashes are detected. For
PL = −1 and PL = 1, crashes are mostly detected but
not always due to numerical inaccuracies, since this
mathematical limiting case is extremely unstable. Al-
ready in the baseline, it can be seen that different SuTs
show significantly different crash rates depending on
the defined target speed (ts) for entering the intersec-
tion.
If we look at the changes caused by the influence
of the other parametrization approach on this base-
line, we can see significant differences depending on
the behavior of the SuT. As expected, the synchro-
nization approach produces more crashes compared
to the baseline if no AEB is included since it reacts to
the behavior of the SuT til a certain point to provoke
the desired constellation - in this case a conflict sit-
uation. Less crashes are produced for the SuTs with
AEB especially at PL > 0 since the object want to pro-
voke a PL = 0 and so makes it easier for the AEB to
Comparison of Parametrization Approaches for Scenario-Based Testing
443
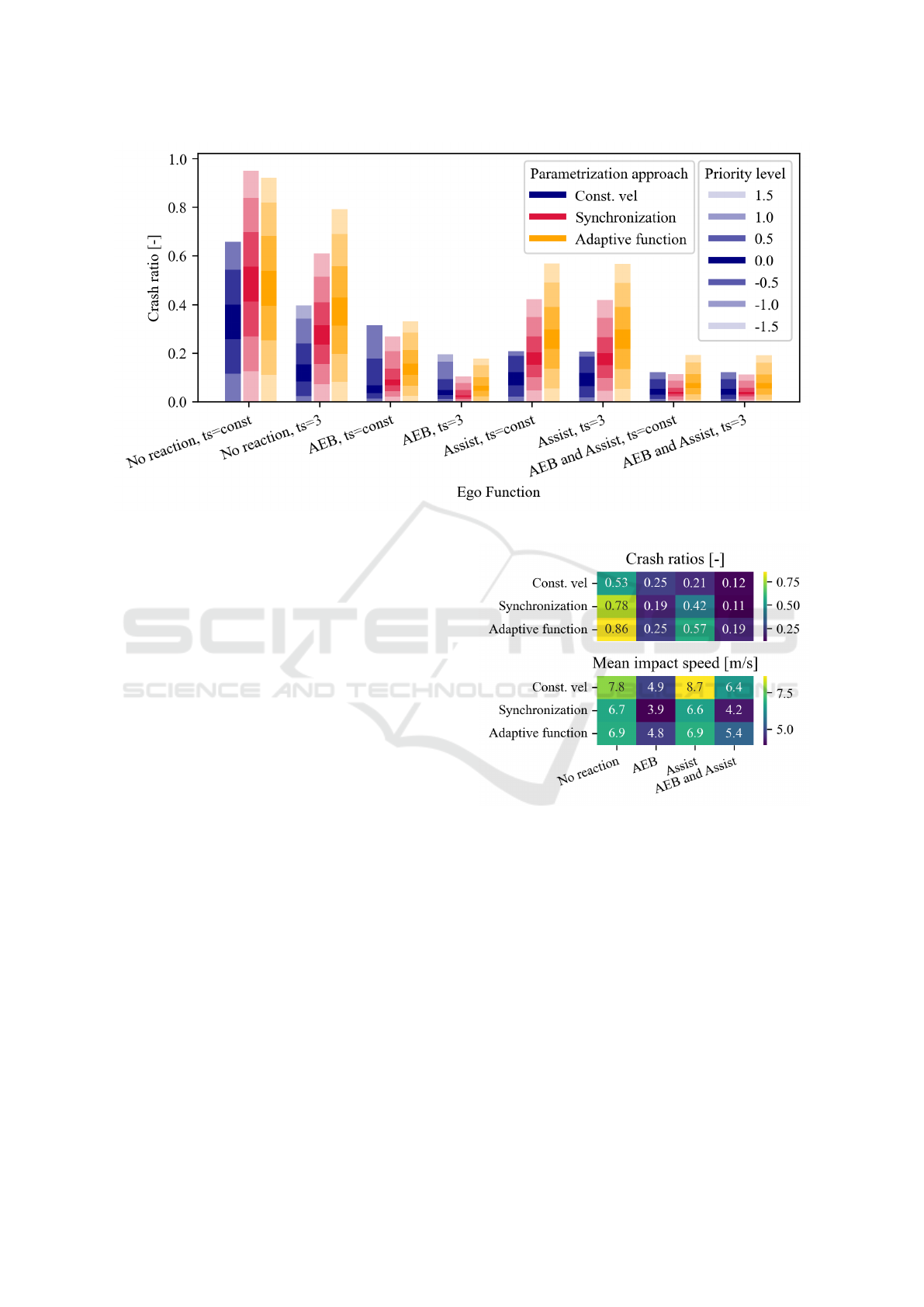
Figure 2: Influence of different parametrizations and SuTs on the case results.
prevent these cases. The adaptive approach produces
generally even more collisions than the synchroniza-
tion parametrization approaches. This is due to the
fact that in this case a collision is provoked up to the
conflict point and not only a prior point in time. In this
case the SuT can only prevent a collision by stopping
before entering the conflict area or if the initial con-
ditions don’t allow a conflict. This can be the case if
the pre-crash time is relatively short and PL /∈ [−1,1]
is selected. So, for a predefined SuT we can already
see a significant influence of the parametrization ap-
proach on the simulation outcome.
When investigating the influence of the
parametrization depending on different SuTs, a
similar conclusion can be drawn. However, there
is no clear correlation between the SuTs and
parametrization approaches affecting the crash rates
of the test cases. Although the synchronization
produces fewer crashes for SuTs compared to the
adaptive function, it is the opposite for the baseline
SuT since the synchronization includes on average
a higher acceleration intensity than the adaptive
approach within the study. Furthermore, the syn-
chronization approach produces even fewer crashes
compared to the baseline in those cases, in which
the synchronization is rather early and the change of
the object propagate until the conflict area no matter
how the SuT behaves. So, taking the influence of
the SuT in comparison with the parametrization into
account, the impact of the parametrization approach
on the simulation outcome becomes less predictable
between these SuTs.
Figure 3: Impact speed distributions of object in compari-
son to crash ratios.
These differences can be seen not only in the num-
ber of collisions, but also in the object road user’s
impact speed (see Figure 3). Thereby, it is not dis-
tinguished between different target velocities. This
shows that collisions not only occur at different fre-
quencies, but that the severity of a collision does not
change proportionally. Rather, a more differentiated
picture must be drawn. Although the highest colli-
sion speeds of the object road user are recorded for
the constant velocity, values for synchronization and
adaptive function are similar for the assist function
but significantly different for the AEB. This can be
explained partly by the different intensities of the ac-
celeration of the object within different parametriza-
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
444
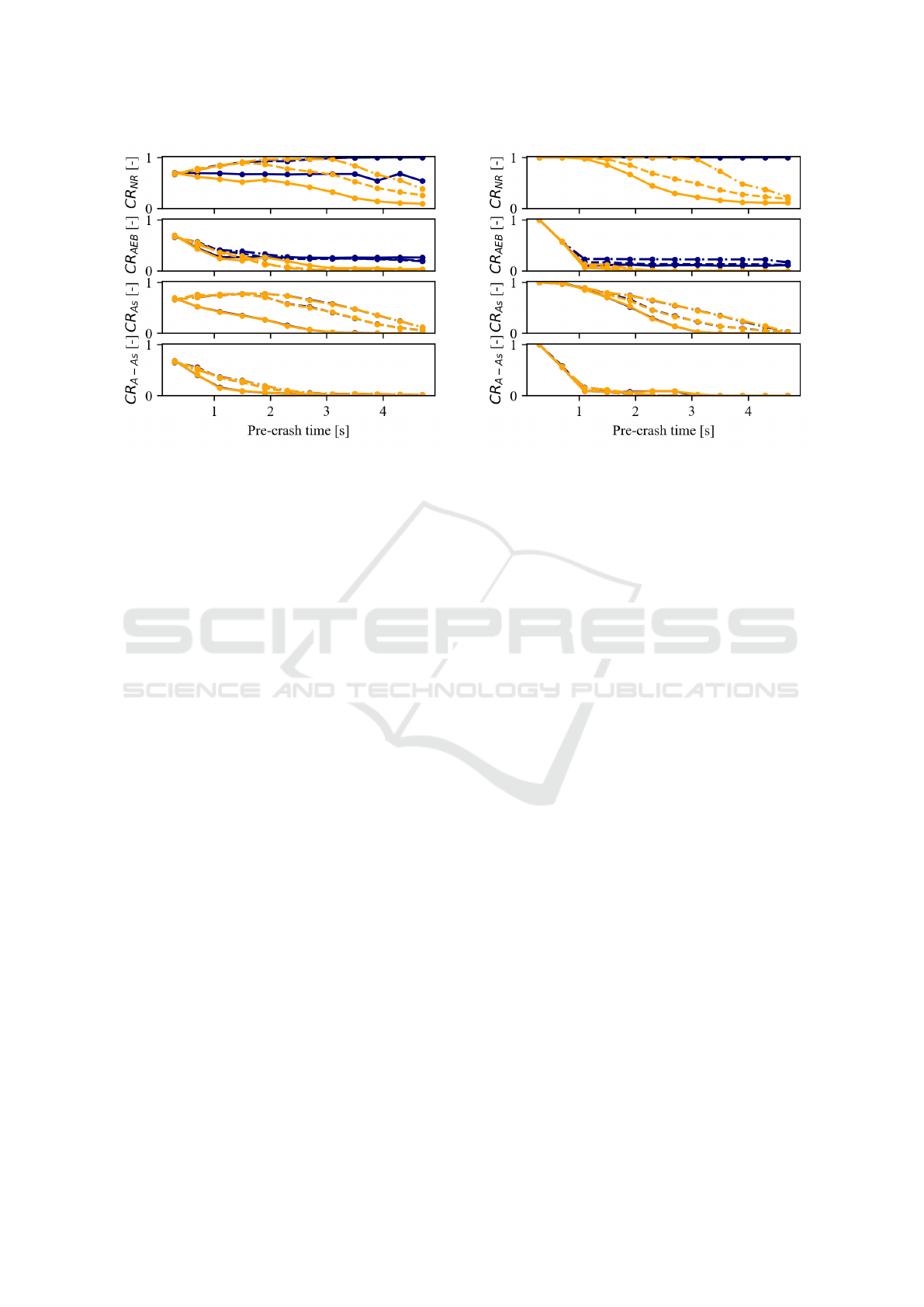
Figure 4: Pre-crash time influence for crash rates (CR) for
SuTs with different target speeds const (blue) and 3 m/s
(yellow) as well as constant velocity (solid), synchroniza-
tion (dashed) and adaptive (dotted dashed) averaged over
all investigated PLs.
tions. Furthermore, a shift can be explained by the
later reaction of an AEB which may be more often
after the synchronization point. This shows that the
quantitative influence of different parametrizations on
the evaluation of a scenario can be significant and dif-
ficult to estimate a priori, as various factors usually
have to be taken into account.
5.2 Implications on Parameter Value
Assignment
In addition to the aggregated influence of the
parametrization approach on a simulation outcome it-
self, we investigated how that effect varies depending
on the actual parameter values assignment. This in-
fluence is investigated by varying the pre-crash time
and PL. According to Figure 4, the number of crashes
with regard to the influence of the pre-crash time and
its dependency with parametrization approach and the
SuT can be significant. The figure shows that the dif-
ferent characteristics of a parametrization and an SuT
change based on the pre-crash time. While a similar
outcome can be observed for a pre-crash time close
to zero seconds, this changes with increasing time
and converges in some cases. With regard to the ef-
fects of the SuT, it can be observed that shorter re-
action times of SuTs such implemented in the AEB
lead to faster convergence, while the assist function
takes longer. We show that different effects work
against each other, especially with the more adaptive
parametrizations. For scenarios without a designed
collision, the state of conflict must first be reached,
Figure 5: Pre-crash time influence for PL = 0 distinguishing
target speed const (blue) and 3 m/s (yellow) as well as con-
stant velocity (solid), synchronization (dashed) and adap-
tive (dotted dashed).
resulting in more crashes (orange dotted dashed line
curve). Especially with long pre-crash times, how-
ever, the early influence of the delay towards the in-
tersection takes over the larger part, so that the curves
decrease again with longer lead times of scenarios.
Taking the PL as another parameter in combina-
tion into account, the picture can be drawn slightly
differently (see Figure 5). In this case, the effect of
the rise is eliminated, as collisions already occur at the
beginning and only the SuT can prevent them. How-
ever, the ability naturally goes hand in hand with the
time available and the intensity of the SuT, as well
as a counter movement of the parameterized object.
Accordingly, the influence of the parametrization is
shown. For example, the adaptive approach can en-
sure crashes for the longest pre-crash time, but falls
off relatively faster. This shows that the influence of
time also has a significant influence, which in turn de-
pends on the parametrization and the SuT. However,
it also shows that saturation effects occur with a suf-
ficiently long pre-crash time, but these make the sce-
nario less robust in relation to the originally desired
constellation and therefore depending on the proce-
dure harder to incorporate in a safety argumentation
or assessment. So, it can be shown that even individ-
ual parameter value assignments itself may have rel-
evant impacts varying depending on the parametriza-
tion.
Comparison of Parametrization Approaches for Scenario-Based Testing
445

6 DISCUSSION
The results show that not only the parameters itself,
but also the approach of parametrization can have a
significant influence on the simulation outcome. This
implies that the comparability of two analyses cannot
be described purely in terms of naming the outcome
of abstract scenarios. Similarly, a relative comparison
between a baseline and a SuT is not transferable as
the influence is not independent of the parametriza-
tion. Rather, for a direct comparison of both abso-
lute figures and relative evaluation a comparison of
the parametrization type of a scenario is also neces-
sary and should be presented transparently.
Furthermore, the analysis of the pre-crash time in
a scenario shows that its influence can be significant.
If it is too short, functions cannot react adequately. If
it is too long, instabilities can play a role depending
on the simulation model. Accordingly, this should be
considered in advance for a valid result.
The results are based on the comprehensive anal-
ysis of one abstract scenario. However, a generaliza-
tion of the discussed results is possible for several
reasons: On the one hand, the scenario used repre-
sents a frequently occurring case. On the other hand,
the models used to control road users are so general
that no assumptions were made about the type of road
user. Although there will be deviations for other road
users due to the dimensions, there is no reason to
assume that observed effects (possibly in a different
form) will not also be found in other scenarios and
may be even more significant depending on the com-
plexity.
Based on the results, multiple findings can be
summarized and recommendations can be derived:
• Different parametrizations produce fundamen-
tally different results. Accordingly, the design
should be closely coordinated with the purpose of
the test.
• It is not advisable to compare outputs from sce-
narios directly with each other without detailed
knowledge of their design, as these can differ.
• The longer the simulation, the less likely it is
that even small changes will affect an outcome.
Accordingly, the scenario should only be long
enough to see the desired effects.
• The pre-crash time before the effect to be inves-
tigated should be long enough to allow a reaction
within the scenario.
• For a good traceability and transparency, it is ad-
visable to document key design decisions of the
scenario parametrization.
As proposed in the first recommendation, the
choice of scenario parametrization should depend on
the use case, the purpose of the test, and the models
used. Therefore, based on our findings, we propose
questions which may guide in the selection of a proper
approach.
• Can the SuT (or any other reactive in-simulation
model) show any reaction because of the sce-
nario component? If no reaction is to be expected
within the scenario with regards to the scenario el-
ement, there is no need to generate a reactive sce-
nario and actions can be predefined. In this case,
further questions are not needed.
• Is the purpose of the scenario to challenge the SuT
as much as possible to test conflict avoidance? If
it should be used for a falsification of a SuT, the
other road users should try to provoke an accident
until the end. This leads to a high reacivity within
the scenario.
• Should the behavior of the scenario components
reflect usual/ realistic behavior? If that is the case,
an interactivity leading to a falsification may be
not suitable - neither may a purely trajectory fol-
lowing description be but a specific model may be
needed.
• Is an adequate reaction model for scenario com-
ponents available? If that is the case, it may make
sense to go for a higher reactivity since the used
model.
When answering these questions, limitations may
arise due to missing information, trade-offs that have
to be made, or missing models. These limitations
should be made transparent to allow contextualization
of test results.
7 CONCLUSION
Within the paper the authors assessed the influence of
different parametrization approaches on the result of
an assessment. Therefore, the difference between a
parametrization approach and the actual parametriza-
tion is defined. Guidance is given which effects from
parametrization approaches should be considered for
different use cases. The influences of different ap-
proaches are shown in a large study assessing differ-
ent SuTs and parameter values. As one aspect, the
pre-crash time is shown as a relevant (meta) param-
eter affecting the outcome of a scenario. We show
that the parametrization has a relevant effect on the
outcome and should be chosen carefully. For this,
recommendations are finally given to account for the
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
446

capabilities of a SuT and the purpose of a test. It is es-
sential to carefully choose and adequately document
the parametrization approach to allow for a reliable
statement within a safety assessment or safety assur-
ance argumentation. These recommendations could
be detailed for specific use cases.
ACKNOWLEDGEMENTS
The work of this paper has been done in the context
of the V4SAFETY project which is funded by the Eu-
ropean Commission’s Horizon Europe Research and
Innovation Programme under grant agreement num-
ber 101075068. Views and opinions expressed, are
those of the author(s) only and do not necessarily re-
flect those of the European Union or the European
Climate, Infrastructure and Environment Executive
Agency (CINEA). Neither the European Union nor
the granting authority can be held responsible for
them.
REFERENCES
ASAM e.V. (2024). ASAM OpenSCENARIO® XML Ver-
sion 1.3.0.
Bach, J., Otten, S., and Sax, E. (2016). Model based sce-
nario specification for development and test of auto-
mated driving functions. In 2016 IEEE Intelligent Ve-
hicles Symposium (IV), pages 1149–1155.
Bock, J., Krajewski, R., Moers, T., Runde, S., Vater, L.,
and Eckstein, L. (2020). The ind dataset: A drone
dataset of naturalistic road user trajectories at german
intersections. In 2020 IEEE Intelligent Vehicles Sym-
posium (IV), pages 1929–1934.
de Gelder, E. and Camp, O. O. d. (2024). Scenario-
based assessment of automated driving systems: How
(not) to parameterize scenarios? arXiv preprint
arXiv:2409.01117.
de Gelder, E., Paardekooper, J.-P., Saberi, A. K., Elrofai, H.,
Camp, O. O. d., Kraines, S., Ploeg, J., and De Schut-
ter, B. (2022). Towards an ontology for scenario def-
inition for the assessment of automated vehicles: An
object-oriented framework. IEEE Transactions on In-
telligent Vehicles, 7(2):300–314.
Fahrenkrog, F., Fries, A., Das, A., Kalisvaart, S., Cha-
roniti, E., Op den Camp, O., et al. (2024). Draft
prospective safety assessment framework - method.
Milestone report MS10 of the Horizon Europe project
V4SAFETY.
Galbas, R., Reich, J., Schittenhelm, H., and Wagener, N.
(2022). Safeguarding methods for complex traffic sce-
narios for approval of automated driving functions.
ATZ worldwide, 124(9):56–61.
Geller, C., Haas, B., Kloeker, A., Hermens, J., Lampe, B.,
Beemelmanns, T., and Eckstein, L. (2024). Carlos: An
open, modular, and scalable simulation framework for
the development and testing of software for c-its. In
2024 IEEE Intelligent Vehicles Symposium (IV), pages
3100–3106. IEEE.
Glasmacher, C., Schuldes, M., Topalakatti, P., Hristov, P.,
Weber, H., and Eckstein, L. (2023a). Scenario-based
model of the odd through scenario databases.
Glasmacher, C., Weber, H., Schuldes, M., Wagener, N., and
Eckstein., L. (2023b). Generation of concrete param-
eters from logical urban driving scenarios based on
hybrid graphs. In Proceedings of the 9th Interna-
tional Conference on Vehicle Technology and Intel-
ligent Transport Systems - VEHITS, pages 215–222.
INSTICC, SciTePress.
Hu, M. and Li, Y. (2017). Drivers’ avoidance patterns in
near-collision intersection conflicts. In 2017 IEEE
20th International Conference on Intelligent Trans-
portation Systems (ITSC), pages 1–6.
International Organization for Standardization (2022a).
Road vehicles - safety of the intended functionality.
International Organization for Standardization (2022b).
Road vehicles - test scenarios for automated driving
systems - vocabulary.
Mercedes-Benz AG (2024). Drive pilot technology by
mercedes-benz. Accessed: 2024-11-08.
PEGASUS Project Consortium (2019). Pegasus method -
an overview. Technical report. Accessed: 2024-11-
04.
UNECE (2021). UN Regulation No. 157 on Automated
Lane-Keeping Systems (ALKS). Revision as of Jan-
uary 2023, adopted by UNECE’s World Forum for
Harmonization of Vehicle Regulations.
Waymo LLC (2024). Waymo driver. Accessed: 2024-11-
08.
Weber, H., Glasmacher, C., Schuldes, M., Wagener, N., and
Eckstein, L. (2023a). Holistic driving scenario con-
cept for urban traffic. In 2023 IEEE Intelligent Vehi-
cles Symposium (IV), pages 1–8.
Weber, H., Glasmacher, C., Schuldes, M., Wagener, N., and
Eckstein, L. (2023b). Holistic driving scenario con-
cept for urban traffic. pages 1–8.
Winner, H., Lemmer, K., Form, T., and Mazzega, J. (2018).
PEGASUS—first steps for the safe introduction of au-
tomated driving. In Lecture Notes in Mobility, pages
185–195. Springer International Publishing.
Comparison of Parametrization Approaches for Scenario-Based Testing
447
