
Dynamic Charging on the Go: Optimizing Mobile Charging Stations for
Electric Vehicle Infrastructure
Suhas Jain and Arobinda Gupta
Dept. of Computer Science & Engineering, Indian Institute of Technology Kharagpur, WB-721302, India
Keywords:
Electric Vehicle, Mobile Charging Station, Charging Request, Scheduling.
Abstract:
With the growing adoption of electric vehicles (EVs) as an eco-friendly and sustainable means of transporta-
tion, availability of adequate EV charging infrastructure has become very important. While fixed charging
stations are the primary means for public charging, they can be effectively augmented by mobile charging
stations. In this paper, we address the problem of planning and operating a mobile charging station fleet by an
operator. We propose an algorithm for the operator to use for route planning of the MCSs and for scheduling
charging requests of EVs to them to try to maximize the number of charging requests served. Detailed simu-
lation results are presented in different realistic scenarios to show that the proposed algorithm works well.
1 INTRODUCTION
Electric vehicles (EVs) are being increasingly seen as
the future of transportation towards a more sustain-
able future, with the global EV market growing at
a fast rate. EVs are primarily charged at home us-
ing slow charging options, or at fixed charging sta-
tions (FCSs) installed at designated locations offering
fast charging options. As the adoption of EVs grows,
the availability and accessibility of adequate charging
points will become pivotal factors in the widespread
acceptance of EVs. However, fixed charging stations
are anchored to specific locations, which presents a
number of challenges, such as lack of universal ac-
cessibility, space availability, high setup cost etc.
Mobile charging stations (MCSs) have been pro-
posed as a versatile and innovative solution to these
challenges. MCSs can be built using conventional
vehicles carrying batteries for charging, with plug-
in charging capabilities for EVs to charge. They can
park anywhere with enough space to charge EVs, and
can bring charging facilities directly to the EV user,
regardless of their locations, thereby providing easy
access to EV charging. MCSs can be swiftly de-
ployed to areas experiencing high demand or in ar-
eas where the charging infrastructure is inadequate or
overloaded. They can also be used to provide emer-
gency charging services to stalled vehicles with little
or no charge left.
In this paper, we consider an MCS operator with
a fleet of MCSs, and address the problem of dispatch-
ing the MCSs to different locations in a city to serve
EV charging requests. Specifically, we first formu-
late the problem of planning the placement of MCSs
at different locations in a city and scheduling EVs to
a suitable MCS for charging. We then propose an al-
gorithm called GoMCS for the problem that attempts
to maximize the number of requests served while try-
ing to optimize average distance travelled by MCSs
and average waiting times of EVs. Detailed simula-
tion results are presented to show that the proposed
algorithm performs well compared to an existing al-
gorithm.
2 RELATED WORK
The existing literature in the area of mobile EV charg-
ing can be broadly classified into two parts, design
of MCS infrastructure, and dispatch and operation
of MCSs (the focus of this work). Several existing
works have looked at different aspects of MCS dis-
patch and operation such as path planning, deciding
priority of EVs to be charged, deciding charging lo-
cations and times etc., to optimize various objectives
such as serving the most number of customers, mini-
mizing wait time for customers, maximizing profit for
MCS operators etc. (Atmaja and Mirdanies, 2015;
Cui et al., 2018; Tang et al., 2020; Raboaca et al.,
2020; Moghaddam et al., 2021; Jeon and Choi, 2021;
Kong, 2019; El-Fedany et al., 2021; Zhang et al.,
466
Jain, S. and Gupta, A.
Dynamic Charging on the Go: Optimizing Mobile Charging Stations for Electric Vehicle Infrastructure.
DOI: 10.5220/0013286400003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 466-473
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

2020; Liu et al., 2022; Wang et al., 2019; Liu et al.,
2018). The algorithms differ in assumptions made
and target parameters chosen.
Among the works mentioned above, only (Liu
et al., 2018) and (Tang et al., 2020) address online
route planning and operation of MCSs. The work
in (Liu et al., 2018) focus on using demand and dis-
tance based routing algorithms for MCSs, but does
not propose any mechanism for finding the optimal
MCS for a particular request. The work in (Tang
et al., 2020) formulates the problem as a mixed in-
teger linear programming problem which is not scal-
able to a large number of requests and MCSs. We
aim to build efficient heuristic algorithms which per-
form both route planning of MCSs and scheduling of
charging requests in an online manner at scale.
3 PROBLEM SPECIFICATION
We consider EVs moving in a city, with an MCS op-
erator providing mobile charging service to the EVs.
MCSs are charging stations with limited charge ca-
pacity (from batteries carried on vehicles) that move
within the city. Their states are always known to the
MCS operator, including remaining charge, location,
and availability. While the capacity of an MCS to
charge EVs depends on the capacity of batteries it car-
ries, the MCS itself is assumed to be gas-powered;
hence, it is assumed to have no range limitation for
its own movement. An MCS can only charge EVs at
one or more of a set of predefined fixed charging loca-
tions. We assume that at a time, only one MCS can be
parked at one of these locations. The charging service
is provided for a fixed duration in a day, broken up
into T time instants. At the start of a day, all MCSs
are fully charged and stationed at their home depot.
MCSs travel to different locations to charge EVs as
directed by the MCS operator. If an MCS runs out of
charge, it goes to its closest depot to get charged, and
then services requests again.
Each EV move from a source to a destination lo-
cation. If the remaining charge is deemed to be insuf-
ficient, EVs make charging requests with details of
their requirements to the MCS operator’s central con-
trol system. The central system sends a response to
the request immediately accepting or rejecting it. If
the system accepts a request, it is always served.
The road network in the city is modeled as a di-
rected graph G = (N , E), where N denotes the set
of nodes, and E denotes the set of roads. The nodes
can be vehicle locations, charging stations, depot lo-
cations, charging locations, or source/destination lo-
cations.
The set of electric vehicles is denoted as V .
A vehicle v ∈ V is represented by the tuple
⟨cap
v
, soc
t
v
, loc
t
v
, s
v
, d
v
, c
v
⟩, where cap
v
is the bat-
tery capacity (kWh) of v, soc
t
v
is the state of charge
(SoC) of v at time t (charge remaining as a percentage
of total charge), loc
t
v
is the location of v at time t, s
v
is
the average speed of the vehicle, d
v
is the discharging
rate (battery discharged per unit distance), and c
v
is
the charging rate (battery charged per unit time).
Let M be the set of all MCSs. An MCS m ∈ M
at a particular time t, is represented by the tuple
⟨ dep
m
, cap
m
, soc
t
m
, loc
t
m
, s
m
, out
m
, c
m
, cout
m
,
req list
t
m
, path
t
m
⟩, where dep
m
is the home depot of
m, cap
m
is the effective battery capacity (kWh) of m
(to charge EVs), soc
t
m
is the state of charge (SoC) of
m, loc
t
m
is the location of m at time t, s
m
is the av-
erage speed of m, out
m
is the number of outlets/ports
in m which can be used for charging, c
m
is the rate at
which m can get charged, cout
m
is the rate at which m
can charge a vehicle (in kWh per unit time), path
t
m
is
the future path planned for m at time t (a sequence of
tuples, each with a location, starting time and ending
time denoting the duration the MCS will stay in that
location), and req
list
t
m
is the requests scheduled at
the MCS at time t. The requests are stored as an array
of 2-tuples, containing the starting time at which the
vehicle is scheduled to start, and the time at which the
charging will end.
Let R be the set of all charging requests.
A request r ∈ R is represented by the tuple
⟨ time
r
, v
r
, curr soc
r
, des soc
r
, req loc
r
,
des loc
r
, dev
r
, wait
r
⟩, where time
r
is the time at
which the request is made, v
r
is the EV which has
made the request, curr soc
r
is the current SoC of the
EV requesting charge, des soc
r
is the desired SoC of
the EV requesting charge, req loc
r
is the current lo-
cation of the EV when the request is made, des loc
r
is the destination location of the EV, dev
r
is the max-
imum extra distance the EV is willing to travel for
charging, and wait
r
is the maximum time the vehicle
can wait at the charging location. Let L (L ⊂ N ) be
the set of all charging locations. MCSs can charge
EVs only at one of these locations.
The output of any algorithm for the MCS alloca-
tion problem is a |M |×|V |×|L|×T matrix S , where
S[m, v, l, t] = 1 if and only if MCS m is charging the
EV v placed at charging location l at time t, 0 other-
wise. The problem is to compute a schedule for plac-
ing the set of MCSs at the set of locations for charging
the vehicles in the set V such that the number of ve-
hicles charged is maximized. Formally, the goal is to
maximize
∑
m∈M
∑
v∈V
∑
l∈L
∑
t∈T
Dynamic Charging on the Go: Optimizing Mobile Charging Stations for Electric Vehicle Infrastructure
467

(S[m, v, l, t] = 0 ∩ S[m, v, l, t + 1] = 1)
subject to the following constraints:
1. An EV can be in at most one location at one time
being charged by at most one MCS.
2. An MCS can be in at most one location at a point
of time.
3. For each MCS, the total charge provided to all
EVs is less than or equal to its capacity.
4. At a time each MCS can charge at most as many
EVs as the number of ports it has.
5. At most one MCS can be located at a charging
location at a time.
6. If an MCS starts charging an EV, it charges the
EV fully (upto its desired final SoC) without in-
terruption.
7. An MCS must have enough time to move between
two charging locations if it is charging EVs at both
locations at different times.
8. An EV must have enough charge left to reach its
assigned charging location.
9. The extra distance travelled by the EV must be
less than the maximum extra distance allowed in
the request.
10. The maximum time spent at the charging location
must be less than the maximum waiting time al-
lowed in the request.
4 GoMCS ALGORITHM
In this section, we present a heuristic algorithm,
GoMCS, for maximizing the number of charging re-
quests served. The algorithm is divided into two parts,
planning the routes of the MCSs and scheduling the
charging requests made by EVs to MCSs. The algo-
rithms for both these parts are described next.
4.1 Route Planning of MCS
For this part, we assume that the estimated demands at
future points in time at various locations are available.
We briefly discuss later two heuristic implementations
for computing this estimate. We note that this heuris-
tic can be replaced by any other estimate of future
demand using past data, the route planning algorithm
just assumes that such an estimate is available.
At the start of each day, an MCS starts at its home
depot, and then, for the whole day, follows a path
planned at the start of the day itself. This path is
followed till the day ends or till the MCS runs out
of charge to give. The algorithm presented next for
route planning of one MCS is repeated for all MCS
independently, i.e., without any consideration of other
MCSs whose paths may have already been planned.
While planning the path of an MCS, it is ensured
that when an MCS reaches a charging location, it
stays there for a fixed amount of time ∆. After this,
it can move to another location or plan to stay for an-
other ∆ time at that same location. The MCS may
move to a nearby location if the demand at the current
location is low and the estimated future demand at the
nearby location indicates it may have unmet demand.
Thus, a mechanism is needed that quantifies demand
in an area and how much of it can be met by nearby
MCSs. The route planning algorithm assumes the ex-
istence of a function GETDEMAND(l, t
1
, t
2
) that can
give the demand at a location l at a future time du-
ration from t
1
to t
2
. Possible implementations of the
function for both offline and online cases is discussed
later in the section.
The path is planned one ∆ interval at a time. Sup-
pose the path of the MCS is already planned till a par-
ticular time. To find the next location (for the next
∆ interval), the demand for the next ∆ interval at all
locations, including the current location, is calculated
using the GETDEMAND function. The location which
has the highest unmet demand, will be picked as the
location for the next ∆ amount of time, and inserted
in the future path list of the MCS. The MCS actually
stays at the next location for a time less than ∆, as the
MCS will take a time equal to the travel time from the
current location to the next location to reach it. This
process continues in an iterative manner for each ∆
interval till the path has been planned for the whole
day.
While computing the demand for the next ∆ in-
terval at a location l, the travel time from the current
location to l is actually subtracted from ∆. Thus, the
time for which the demand is calculated is actually
less than ∆, and this duration decreases further with
increasing distance from the current location as the
travel time increases, causing the demand computed
to be lower also. This in turn reduces the chance that
an MCS will be sent to a location that is far away from
its current location, reducing its travel time.
A sketch of two implementations of the GETDE-
MAND function are briefly discussed next; the full de-
tails are omitted due to lack of space. The first is an
offline one that assumes that all future requests are
known a-priori. A request is considered to be eligible
for computing demand at a location l for a given inter-
val of time τ if (i) the request originates within τ, (ii)
the EV can reach l with its remaining SoC, and (iii) l
satisfies the maximum extra travel distance constraint.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
468

If this request can be served by more than one MCS
nearby, its contribution to the total demand is taken to
be inversely proportional to the number of MCSs that
can service this request. The function returns the total
demand over all eligible requests for l for the duration
τ.
The second implementation assumes that the
charging request patterns for the recent past duration
is available. The core idea of this heuristic is derived
from (Liu et al., 2018), which is modified to match
our system model. For each location l, we first count
the number of requests in each day in the ∆ duration
under consideration that could be served at l without
violating the distance constraint, and an exponential
moving average of this data is taken as the estimate of
the demand d
l
at l for that duration. It is assumed fol-
lowing (Liu et al., 2018) that the demand at a location
i can shift to a nearby location j with a probability
given by P(i, j) =
e
dist(i, j)
∑
l∈L
e
dist(i, j)
. Given the above, the
demand at any location l is now updated by adding
d
loc
× P(loc, l) to d
l
for every other location loc. Fi-
nally, as this demand at l can be serviced by multiple
MCS in the vicinity, the demand is divided by the sum
of a weight for every MCS to get the final estimate of
the demand at l for the duration under consideration.
The weight for an MCS captures the potential of the
MCS to service the requests, and is given by the ra-
tio of the overlap time of the MCS with the duration
under consideration if the MCS is moved to l from its
current location, and the current distance of the MCS
from l. The intuition is that an MCS that is far away
from l has less chance of servicing the demand at l.
When the SoC (of the battery for charging the
EVs) of an MCS falls below a threshold, the MCS
visits the depot nearest to its current location. After it
recharges fully, its original planned path is discarded,
and a new route is planned for it to service requests
for the rest of the day again using the same algorithm
described above.
We will refer to the algorithm using the offline de-
mand estimation as GoMCS-Offline and the one using
the online demand estimate simply as GoMCS in the
rest of this paper.
4.2 Scheduling EV Requests
The output of the route planning algorithm is the route
followed and location of every MCS at each time in-
stant. With this information, the charging requests
made by EVs are considered in increasing order of
request time. To schedule a request, an appropriate
MCS and its location is found first and then a charging
slot is assigned to the EV at that MCS in that location.
Each MCS is first checked to see if it is eligible for
servicing the request. An MCS is eligible to charge an
EV at a location, at a particular charging slot within
the time duration it is scheduled to be at that loca-
tion, if and only if (i) the EV can reach the location of
the MCS with its remaining SoC without violating the
maximum extra distance travel constraint, (ii) there is
enough charge left in the MCS to service the EV re-
quest (considering all already accepted EV requests),
(iii) the allocated slot will not violate the maximum
waiting time constraint of the EV, and (iv) the EV can
finish charging within the duration of stay of the MCS
at that location. Travel times, current SoC, SoC after
reaching the location, and the required charging time
of the EV can be easily computed for performing this
eligibility check.
Among these eligible MCSs, the ones with lower
loads are considered to be better as they will have less
waiting time. For calculating load, the sum of two
load indicators is taken, the current load and the esti-
mated future load. The current load is given simply by
the number of requests already scheduled at the MCS
at that location. For future load, the GETDEMAND
function defined earlier is used. The future load is
estimated in the interval between the time of the re-
quest and the time at which the charging of the EV
will be completed if the MCS being evaluated is cho-
sen. The MCS and its location that gives the low-
est sum is chosen as the MCS and location for the
EV to charge. Note that given the eligibility criteria
for MCS described above, the EV is guaranteed to be
able to complete its charging at that location, though
the waiting time may vary.
Once the MCS and its location are chosen, a
charging slot is assigned to the EV for charging. As
EVs can take different amounts of time to reach the
location, if the slots are allocated in First Come, First
Serve order, then a request that originates later but
closer to the location might start charging earlier than
the original request. This can be a problem as the
starting time of charging of a request must be known
for sure before responding to the request. The prob-
lem of assigning charging slots can be modelled as an
overlapping intervals problem. At any point of time,
the requests scheduled at an MCS can be modelled as
time intervals, and the number of overlapping inter-
vals can never be more than the number of ports on
the MCS. So, to schedule a request, we need to find
the earliest time after the vehicle reaches the MCS, at
which at least one port is available for a certain period
of time. This is a well-known algorithmic problem to
solve and is not further elaborated here.
Dynamic Charging on the Go: Optimizing Mobile Charging Stations for Electric Vehicle Infrastructure
469
5 SIMULATION RESULTS
The proposed algorithm is evaluated using detailed
simulations under different scenarios. The charging
request data used is sourced from a Kaggle Competi-
tion on EV Charging Station Usage of Palo Alto, Cal-
ifornia, USA (Kaggle, 2023). The distance between
any two points is obtained by using OSRM (OSRM,
2024). The parameters used for the simulation are
shown in Table 1.
Table 1: Parameter Values for Simulation.
Parameter Value
Number of charging locations 200
Number of depots 5
Speed of movement of EVs 45 km/h
Speed of movement of MCSs 30 km/h
Mileage of the EVs 5 km/kWh
Charging rate of EVs 6 kW
Charging rate of MCS 45 kW
Battery capacity of the MCS 90kWh
Number of ports on the MCS 4
The length of the interval ∆ 2 hrs
Active time in a day 18 hrs
Number of requests 2000, 4000
Number of MCS 20, 40
The depots and the charging locations are ran-
domly chosen from the 200 candidate locations. It
is ensured that the distance between any two depots
or charging locations is more than a threshold value,
which is defined based on the number of depots and
charging locations.
The request times of the charging requests are dis-
tributed throughout the day in the dataset. The loca-
tion of the EV and its destination are randomly sam-
pled from the candidate locations while making sure
the distance between them is at least 5 km. The rest of
the parameters are uniformly generated in the ranges
mentioned in Table 2. The spatial distribution of the
requests is varied in three different scenarios:
• Scenario 1: Random Charging Requests
• Scenario 2: Urban Commute Charging Requests
• Scenario 3: Repetitive Random Charging Re-
quests
More details on how these patterns are generated are
discussed in the relevant subsections later.
Table 2: Range for request parameters.
Parameter Range
Current SoC [0.5 − 0.8] ∗ req charge
r
Desired SoC ([1− 2]) ∗ req charge
r
Max Extra Distance [2 km, 0.5 ∗ dist
r
]
Max Waiting Time [0.2 − 0.3] ∗ charge time
r
where dist
r
is the distance and req charge
r
is the
charge required for the EV in request r to reach its
destination, and charge time
r
is its charging time to
the desired SoC.
To evaluate the performance of the algorithms, the
following metrics are used: percentage of total re-
quests served, average waiting time of the EVs, and
the variation in the number of requests served by dif-
ferent MCSs. The results show the comparison be-
tween three algorithms: (i) GoMCS, (ii) GoMCS-
Offline and (iii) the algorithm proposed in (Liu et al.,
2018) which is referred to as GSDD. Each result re-
ported is the average of 10 runs.
5.1 Scenario 1: Random Charging
Requests
This scenario considers charging requests from EVs
occurring at random locations with random destina-
tions without any pattern or correlation between the
requests.
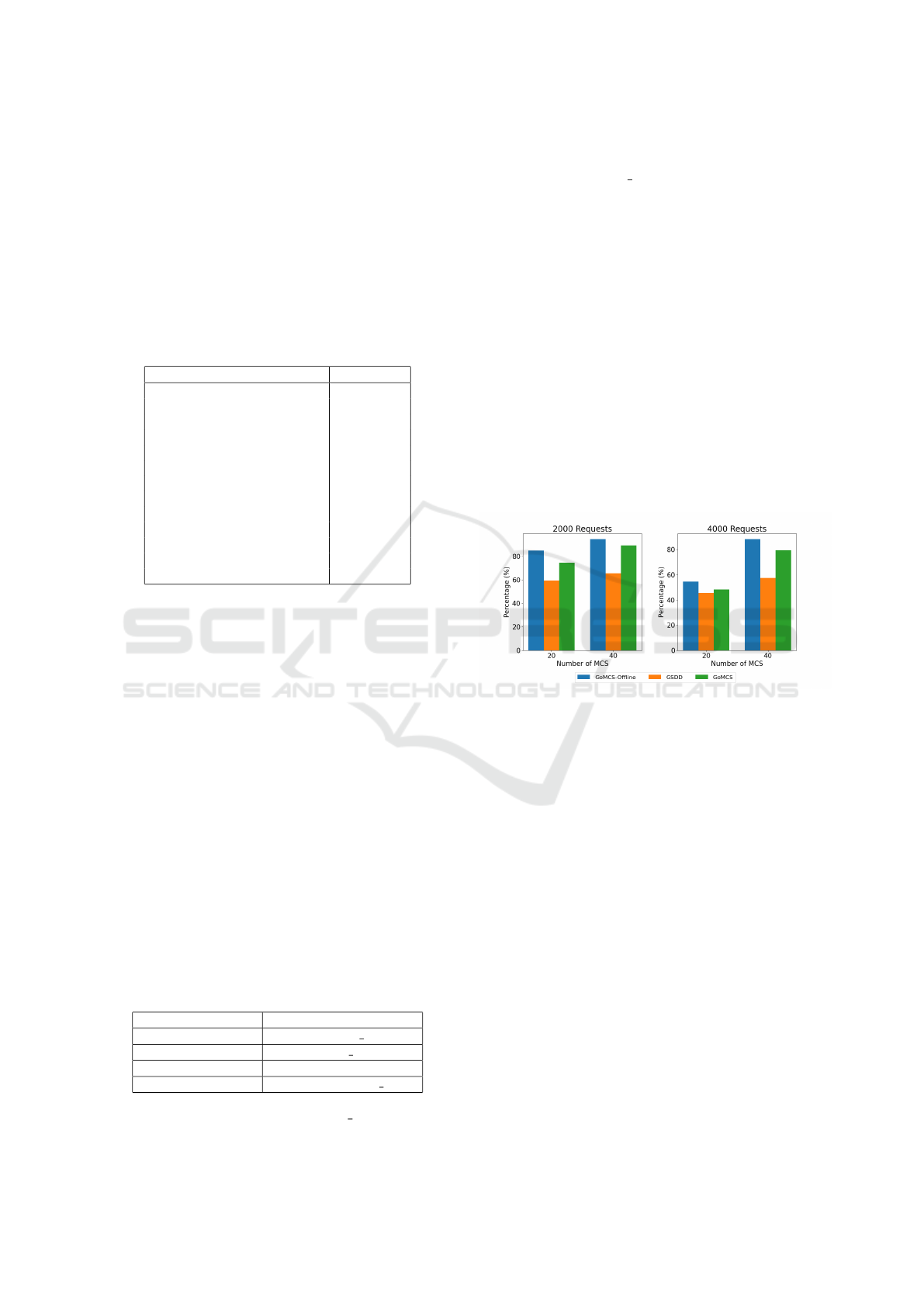
Figure 1: Percentage of requests served.
Fig. 1 shows the percentage of requests served for
varying number of MCSs and requests. It is seen that
as we increase the number of MCSs, the percentage
of served requests always increases as expected. Note
that irrespective of the number of MCSs, there may
always be some requests where either the remaining
charge is too low or the constraints are too strict for
the EV to reach any of the MCSs. It is seen that
GoMCS performs much better than GSDD and worse
than GoMCS-Offline. The increase for GoMCS is
also lower when MCSs are increased in the case of
2000 requests because each incremental MCS serves
fewer requests compared to the previous one, as fewer
total requests remain to be served.
Fig. 2 shows the average waiting time of an EV
for varying number of MCSs and requests. It can be
seen that as the number of MCSs increases, the wait-
ing time decreases as the requests served per MCS de-
creases, causing lower queuing delay. When the num-
ber of requests is low, MCS ports are mostly empty,
so the wait time is mainly because of the MCS arriv-
ing at a location after the EV. As requests increase,
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
470
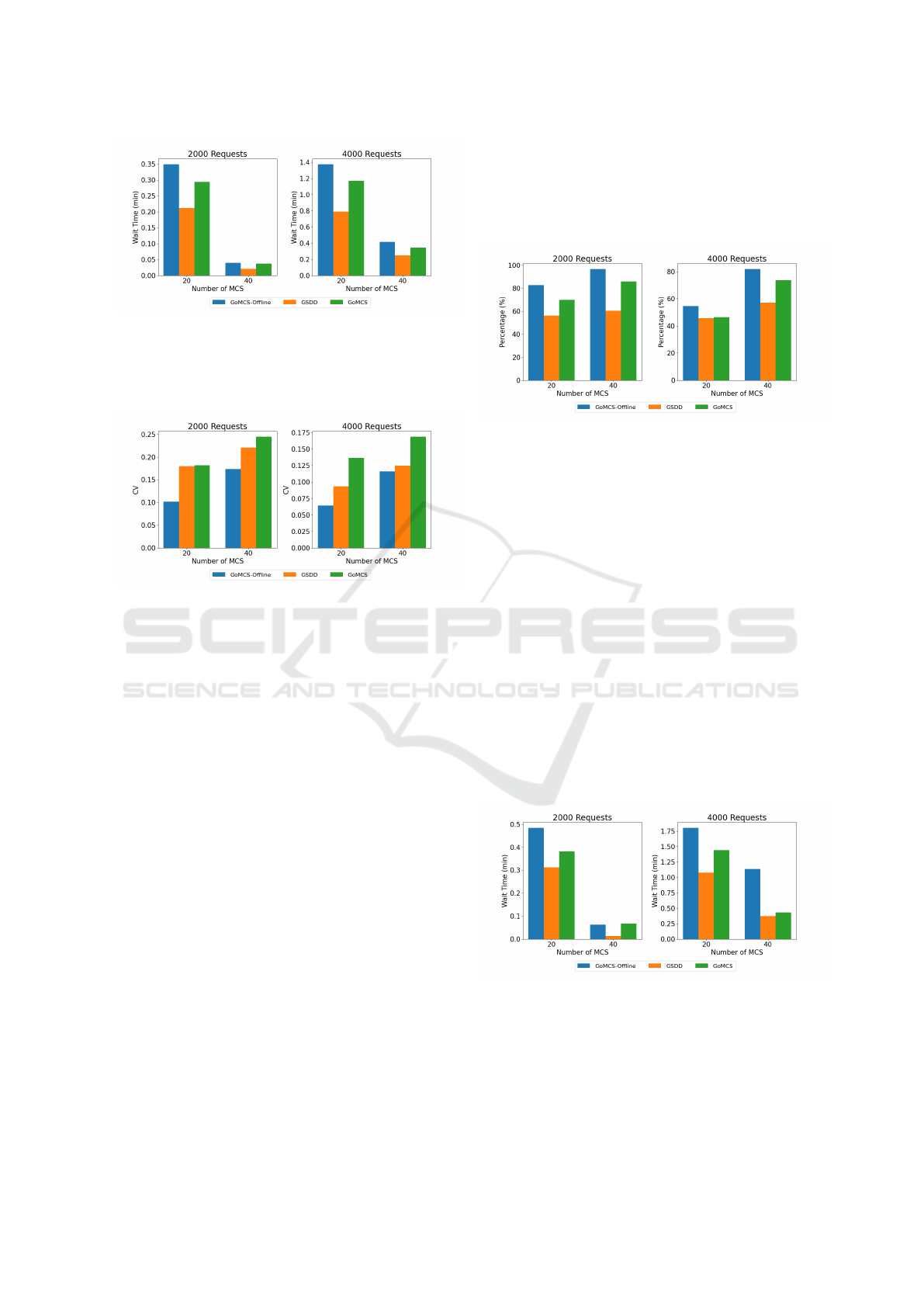
Figure 2: Average Waiting Time of EVs.
the EVs have to wait for free ports to start charging,
which increases the wait time; however this is again
reduced as the number of MCSs increase as expected.
Figure 3: Coefficient of Variance of Requests Served.
Fig. 3 shows the coefficient of variance (CV)
of requests served per MCS with varying number of
MCSs and requests. It is seen that the CV value
decreases with the number of requests and increases
with the number of MCS. This happens because when
there are multiple MCSs and fewer requests in the
same area, some MCSs may remain idle, leading to
a higher CV. GoMCS-Offline has the least variation,
which is expected as with exact knowledge of future
requests, it can distribute the requests to MCSs more
evenly.
5.2 Scenario 2: Urban Commute
Charging Requests
In this scenario, charging requests are simulated from
EVs traveling in a pattern similar to commuter pat-
terns in a metropolitan city. In the first half of the
day, people move from the suburbs (outskirts) to the
central part of the city for jobs, business etc., and the
opposite happens in the second half of the day. While
generating the dataset, the probability of picking up
a location as the starting or ending point is adjusted
according to its distance from the city center. In the
first half, the starting point of a request is chosen with
a probability that is directly proportional to its dis-
tance from the city center. Similarly, while picking
the destination, it is taken as inversely proportional to
the distance from the city center. This dataset tries
to represent the charging needs across a typical big
city, where the deployment of MCSs makes the most
sense.
Figure 4: Percentage of requests served.
Fig. 4 shows the percentage of requests served
for varying number of MCSs and requests. It is seen
that as we increase the number of MCSs, the percent-
age of requests served always increases as expected.
The GoMCS algorithm performs much better than
GSDD in this case also. One change to note is that
across most cases, the percentage of served requests
decreases from Scenario 1. This is because the MCSs
are not distributed according to the traffic patterns,
causing variation in use of MCSs.
Fig. 5 shows the average waiting time of an EV
for varying number of MCSs and requests. The trends
are similar to that in Scenario 1, for similar reasons.
The waiting time for all cases increases compared to
Scenario 1 as if the traffic is congested in a specific
area and a limited number of MCSs are in that area,
then the EVs will need to wait for a longer time. The
trends for the coefficient of variation are also similar
and is not shown separately here again.
Figure 5: Average Waiting Time of EVs.
Dynamic Charging on the Go: Optimizing Mobile Charging Stations for Electric Vehicle Infrastructure
471
5.3 Scenario 3: Repetitive Random
Charging Requests
In this dataset, for the first few days, we generate re-
quests from EVs occurring at random locations with
random destinations without any discernible pattern
or correlation between successive requests. Then,
from a particular day onward, the requests lie within
a certain time and distance bound of the requests that
occur on the previous day and thus are similar. A
similarity index (s
i
) is defined which decides these
bounds on the time and distance, with 0 indicating
that the request pattern is completely random and 1
indicating that the request pattern of consecutive days
are exactly the same. The time and distance bounds
are set as 30 × (1 − s
i
) minutes and 5000 × (1 − s
i
)
meters respectively, where s
i
varies from 0 to 1.
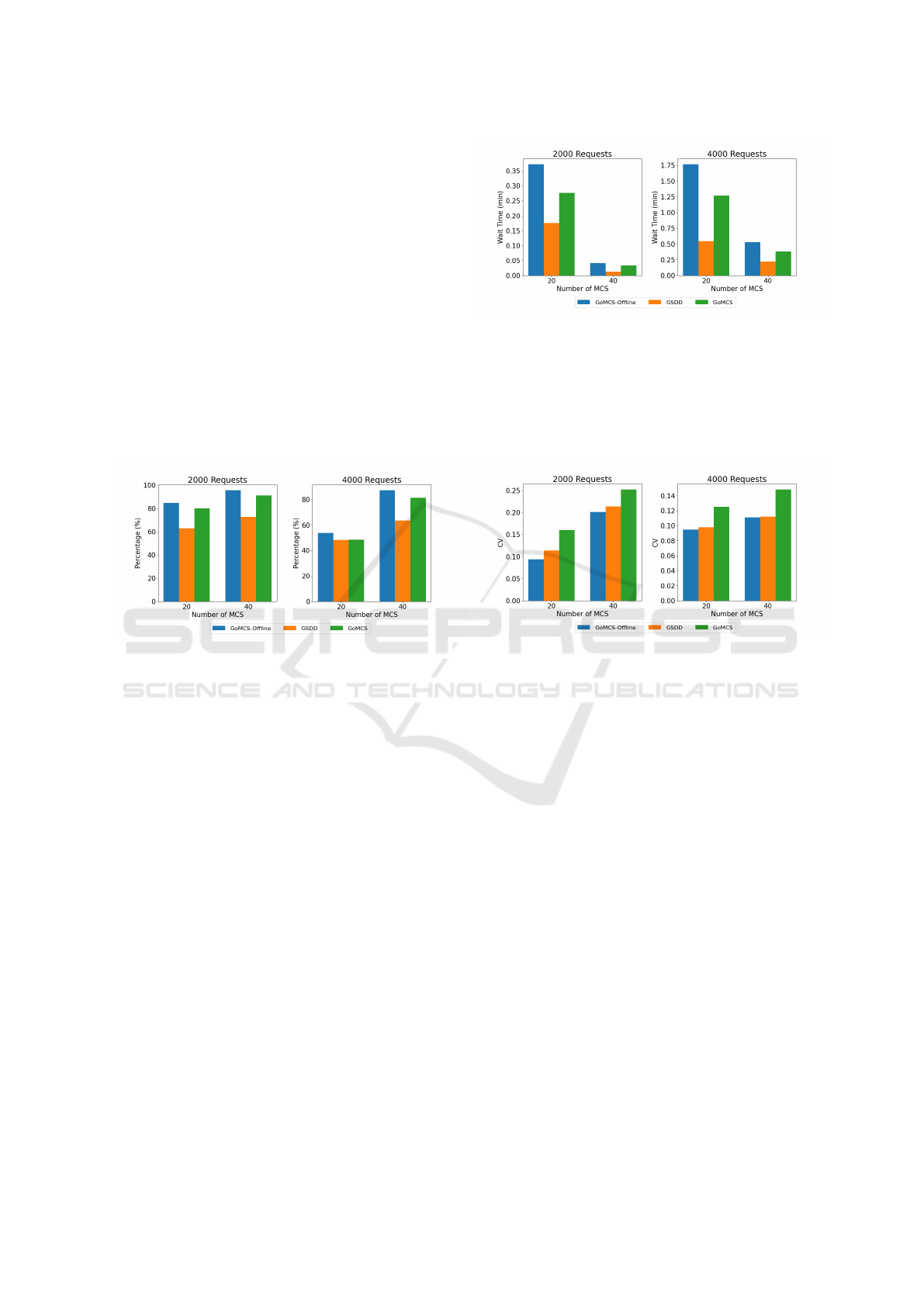
Figure 6: Percentage of requests served.
Fig. 6 shows the percentage of requests served for
different number of MCSs and number of requests.It
is seen that as we increase the number of MCSs, the
percentage of requests served always increases for
the same reason as described earlier. GoMCS per-
forms much better than GSDD in this case also. One
change to note in this case is that although the val-
ues for GoMCS-Offline remain almost the same, the
performance of both GoMCS abd GSDD algorithms
improves, with GoMCS performing almost as well as
GoMCS-Offline. This happens as the heuristic is able
to learn from past request patterns effectively.
Fig. 7 shows the average waiting time of EVs for
varying number of MCSs and requests. From Fig. 2
and Fig. 7, it is seen that although the percentage of
requests served increases for GoMCS and GSDD, the
waiting times remain almost the same or decrease in
some cases. This shows that the algorithms are able
to better distribute the MCSs according to the traffic
patterns.
Figure 7: Average Waiting Time of EVs.
Fig. 8 shows the coefficient of variance (CV)
of requests served per MCS. for varying number of
MCSs and requests. The CV of GoMCS and GSDD
are both slightly less compared to Scenario 1, due to
better prediction of demand resulting in more even
distribution.
Figure 8: Coefficient of Variance of Requests Served.
For this scenario, the robustness of GoMCS to
deviations in the recurring spatiotemporal pattern of
requests is also evaluated for 2000 requests and 20
MCSs. GoMCS is run normally for a few days and
then, for a certain day, the request pattern is changed
to different patterns. In the first case, the start and end
points of the requests are generated randomly across
the city on each day. In the second case, the re-
quests are generated with the start points being closer
to the city center and the end points being away from
the city center. In the third case, the start points are
chosen away from the city center and the end points
closer to the city center. Table 3 shows the results.
As the MCSs are almost evenly distributed on a nor-
mal day, performance difference for the first case is
not significant. In the second case, the EVs are near
the center of the city, so the MCSs located in the out-
skirts are underutilized, and those near the center are
overloaded, which reduces the percentage of requests
served. When EVs move from outskirts of the city,
many trips still pass through the center of the city
so the MCSs in the city center are less underutilized;
hence the fall in performance is much less.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
472
Table 3: Robustness with Request Patterns.
Request Pattern % Served
Normal day (Recurring) 80.1
Random requests 78.8
Request mainly near city center 74.9
Request mainly from outskirts 77.1
REFERENCES
Atmaja, T. D. and Mirdanies, M. (2015). Electric vehicle
mobile charging station dispatch algorithm. Energy
Procedia, 68:326–335. 2nd International Conference
on Sustainable Energy Engineering and Application
(ICSEEA) 2014.
Cui, S., Zhao, H., and Zhang, C. (2018). Multiple types
of plug-in charging facilities’ location-routing prob-
lem with time windows for mobile charging vehicles.
Sustainability, 10(8).
El-Fedany, I., Kiouach, D., and Alaoui, R. (2021). A smart
coordination system integrates mcs to minimize ev
trip duration and manage the ev charging, mainly at
peak times. International Journal of Intelligent Trans-
portation Systems Research, 19.
Jeon, S. and Choi, D.-H. (2021). Optimal energy manage-
ment framework for truck-mounted mobile charging
stations considering power distribution system oper-
ating conditions. Sensors, 21(8).
Kaggle (2023). Ev charging station usage of california city.
https://www.kaggle.com/ds/3417518.
Kong, P.-Y. (2019). Autonomous robot-like mobile chargers
for electric vehicles at public parking facilities. IEEE
Transactions on Smart Grid, 10(6):5952–5963.
Liu, L., Xi, Z., Zhu, K., Wang, R., and Hossain, E. (2022).
Mobile charging station placements in internet of elec-
tric vehicles: A federated learning approach. IEEE
Transactions on Intelligent Transportation Systems,
23(12):24561–24577.
Liu, Q., Li, J., Sun, X., Wang, J., Ning, Y., Zheng, W.,
Li, J., and Liu, H. (2018). Towards an efficient and
real-time scheduling platform for mobile charging ve-
hicles. In Vaidya, J. and Li, J., editors, Algorithms and
Architectures for Parallel Processing, pages 402–416.
Springer International Publishing.
Moghaddam, V., Ahmad, I., Habibi, D., and Masoum,
M. A. (2021). Dispatch management of portable
charging stations in electric vehicle networks. eTrans-
portation, 8:100112.
OSRM (2024). Open source routing machine.
https://project-osrm.org/.
Raboaca, M.-S., Bancescu, I., Preda, V., and Bizon, N.
(2020). An optimization model for the temporary
locations of mobile charging stations. Mathematics,
8(3).
Tang, P., He, F., Lin, X., and Li, M. (2020). Online-to-
offline mobile charging system for electric vehicles:
Strategic planning and online operation. Transporta-
tion Research Part D: Transport and Environment,
87:102522.
Wang, F., Chen, R., Miao, L., Yang, P., and Ye, B.
(2019). Location optimization of electric vehicle
mobile charging stations considering multi-period
stochastic user equilibrium. Sustainability, 11(20).
Zhang, X., Cao, Y., Peng, L., Li, J., Ahmad, N., and Yu, S.
(2020). Mobile charging as a service: A reservation-
based approach. IEEE Transactions on Automation
Science and Engineering, 17(4):1976–1988.
Dynamic Charging on the Go: Optimizing Mobile Charging Stations for Electric Vehicle Infrastructure
473
