Exploring Shared Gaussian Occupancies for Tracking-Free,
Scene-Centric Pedestrian Motion Prediction in Autonomous Driving
Nico Uhlemann
a
, Melina W
¨
ordehoff
b
and Markus Lienkamp
c
Technical University of Munich, School of Engineering & Design, Department of Mobility Systems Engineering, Institute of
Automotive Technology and Munich Institute of Robotics and Machine Intelligence (MIRMI), Germany
Keywords:
Pedestrian Motion Prediction, Gaussian Occupancy, Scene-Centric, Autonomous Driving.
Abstract:
This work introduces a scalable framework for pedestrian motion prediction in urban traffic, tailored for real-
world applications in autonomous driving. Existing methods typically predict either individual objects, cre-
ating challenges with higher agent counts, or rely on discretized occupancy maps, sacrificing precision. To
overcome these limitations, we propose a scene-centric transformer architecture with a cluster-based training
approach, capturing pedestrian dynamics through combined probability distributions. This strategy enhances
prediction efficiency as groups of nearby agents are unified into a shared representation, thus reducing compu-
tational load while still maintaining a continuous output format. Additionally, we investigate a tracking-free
design, exploring the feasibility of accurate predictions based solely on object lists without explicit object as-
sociation. To assess predictive performance, we compare our approach to state-of-the-art trajectory prediction
methods, analyzing several metrics while keeping practical applications in mind. Evaluations on a dedicated
pedestrian benchmark derived from the Argoverse 2 dataset demonstrate the model’s strong predictive accu-
racy and highlight the potential for tracking-free future developments.
1 INTRODUCTION
Autonomous driving has received significant attention
in both industry and research due to its potential to en-
hance traffic flow, improve mobility for individuals,
and offer economic benefits (Hussain and Zeadally,
2019). However, integrating autonomous vehicles
(AVs) into complex urban environments presents sub-
stantial challenges, especially in accurately predict-
ing pedestrian motion which is crucial for its safety.
Pedestrians, a particularly vulnerable group of road
users, face a high risk of fatality in accidents and of-
ten exhibit seemingly unpredictable movement pat-
terns as they are unconstrained by predefined lanes or
non-holonomic limitations (Schuetz and Flohr, 2024).
Motion prediction for autonomous driving has
been extensively studied, with deep learning methods
becoming the state of the art. These approaches fall
into two categories: individual trajectory prediction
and environmental occupancy prediction. Trajectory-
based methods assign uni- or multimodal predictions
to each pedestrian (Ridel et al., 2018), requiring accu-
a
https://orcid.org/0009-0006-8774-7888
b
https://orcid.org/0009-0009-0553-7265
c
https://orcid.org/0000-0002-9263-5323
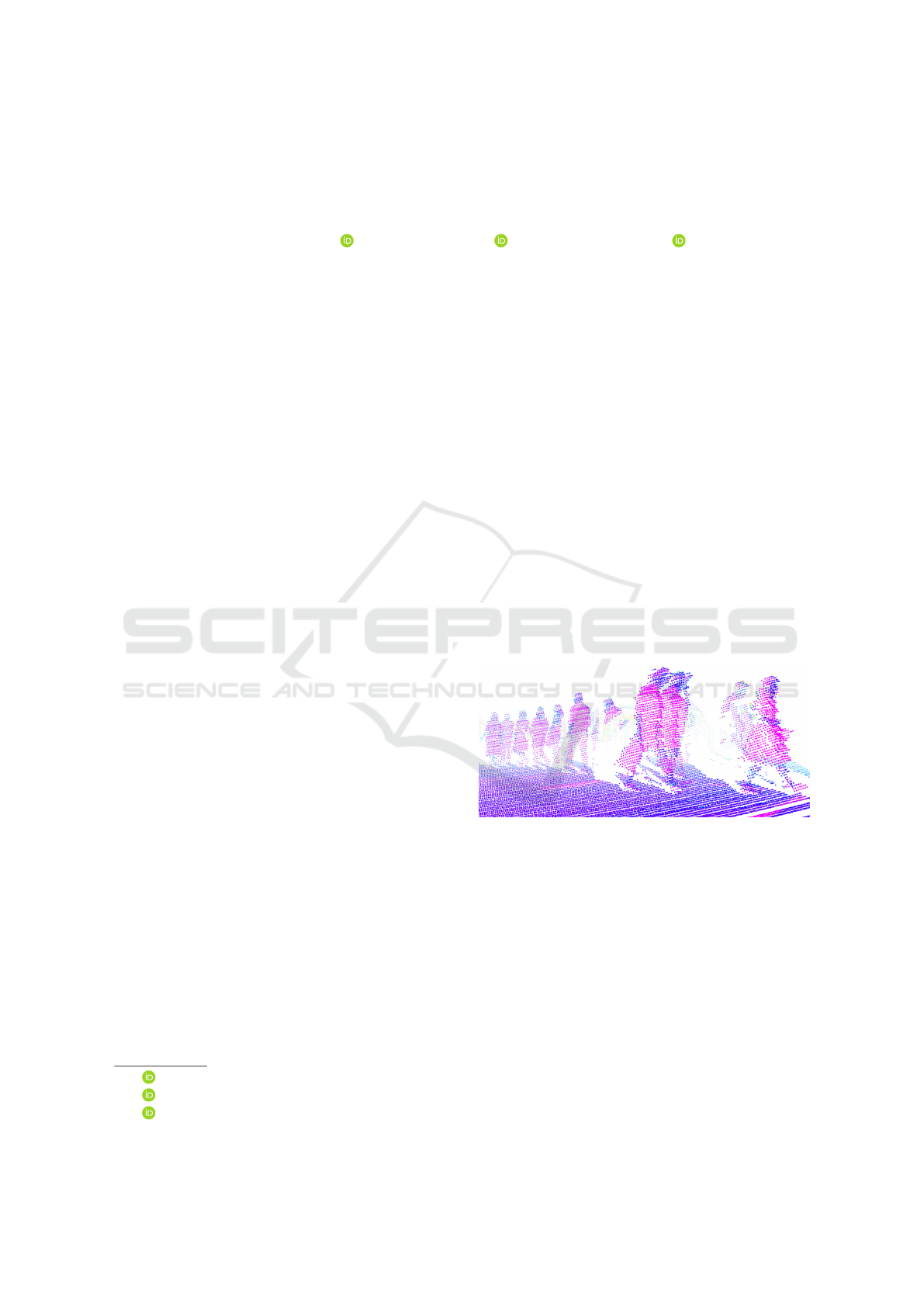
Figure 1: Dense pedestrian crowd crossing the street in
front of the ego vehicle captured by a LiDAR sensor.
rate tracking to model interactions (Uhlemann et al.,
2024). However, tracking becomes challenging in
dense urban settings and for higher agent counts as
seen in Figure 1. In contrast, occupancy-based meth-
ods predict environments holistically, representing
spaces as occupied or unoccupied (Huang et al., 2023)
while often using grid-based formats from a bird’s-
eye-view (BEV) (Rudenko et al., 2021). These meth-
ods face trade-offs between computational efficiency
and spatial precision which is determined by the grid
resolution (Luo et al., 2021).
To address these limitations, this paper introduces
a continuous, probabilistic occupancy approach for
pedestrian motion prediction in urban traffic. By
100
Uhlemann, N., Wördehoff, M. and Lienkamp, M.
Exploring Shared Gaussian Occupancies for Tracking-Free, Scene-Centric Pedestrian Motion Prediction in Autonomous Driving.
DOI: 10.5220/0013288900003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 100-112
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

leveraging mixture models, our model incorporates
uncertainty and achieves accurate and scalable results
through a compact network. Unlike traditional meth-
ods, we minimizes tracking dependency by directly
processing object lists which offers practical advan-
tages in urban scenarios. To our knowledge, this
continuous probabilistic occupancy framework, com-
bined with a tracking-free variation, is a novel contri-
bution to the field yet to be explored. The key contri-
butions of this work are summarized as follows:
• Occupancy Representation: We propose a novel
occupancy representation inspired by mixture
models, using shared probability distributions in-
stead of grid-based methods. By clustering nearby
pedestrians and predicting their motion collec-
tively, our approach reduces computational de-
mands as agent counts increase.
• Model Architecture: We develop a compact,
scene-centric method utilizing a transformer-
based architecture that achieves state-of-the-art
accuracy while being scalable regarding the num-
ber of agents considered.
• Tracking Dependency: Evaluating both,
tracking-dependent and tracking-free approaches,
we showcase that competitive performance can be
achieved without an explicit object association.
2 RELATED WORK
The prediction of pedestrian and vehicle trajectories
in autonomous driving has been widely studied,
with a focus on models that address the inherent
uncertainty in future motion. This section introduces
relevant approaches forming the basis of our pre-
diction framework, complemented by an overview
presented in Figure 2.
Trajectory Prediction. The most common
approach to predict pedestrian motion is through
spatial-temporal paths, called trajectories. Here,
unimodal predictions anticipate a deterministic
outcome, corresponding to the most likely action
(Becker et al., 2019; Zamboni et al., 2022). While
sufficient for slow-moving objects like pedestrians,
particularly for prediction horizons of up to 6 s (Uh-
lemann et al., 2025), more dynamic agents, such as
cyclists and vehicles, require representations capable
of capturing diverse potential futures (Huang et al.,
2022). Multimodal trajectory prediction addresses
this need by assigning each agent a set of trajectories,
often with associated probabilities (Ngiam et al.,
2022; Gilles et al., 2022a) and linked to discrete
actions or maneuvers, such as turning, lane-changing,
or stopping (Lefevre et al., 2014). Generative
models, such as Generative Adversarial Networks
(GANs) and Conditional Variational Autoencoders
(CVAEs), are frequently employed to generate these
representations (Mohamed et al., 2022). GANs use
a generator-discriminator architecture where the
generator proposes candidate trajectories, and the
discriminator evaluates their plausibility against real
data (Goodfellow et al., 2020). Examples include
Social GAN (Gupta et al., 2018) and Social-BIGAT
(Kosaraju et al., 2019), which incorporate social in-
teractions using attention mechanisms or graph-based
structures. CVAEs encode agent positions into a
latent space and decode potential futures (Sohn et al.,
2015). Previous works such as BiTraP (Yao et al.,
2021), ExpertTraj (Zhao and Wildes, 2021), and
AgentFormer (Yuan et al., 2021) demonstrate that
modeling latent variables as Gaussian distributions
reduces false positives compared to non-parametric
distributions. Although generative models effectively
capture complex distributions, they face challenges
such as mode collapse, where predicted trajectories
lack diversity and require extensive sampling, leading
to increased randomness and computational overhead
(Huang et al., 2023; Gilles et al., 2022a).
Non-Parametric Prediction. Probabilistic
re-presentations, such as occupancies, offer a way to
capture the diversity of scenarios beyond trajectories
by predicting the behavior of all objects in a scene
collectively (Toyungyernsub et al., 2022). The
most common non-parametric approach discretizes
the surrounding space into grid cells of equal size
(Gulzar et al., 2021). Although focusing on single
pedestrians, Ridel et al. (Ridel et al., 2020) em-
ploy a Convolutional Long Short-Term Memory
(ConvLSTM) network to predict future occupancies
by assigning binary occupation probabilities to
grid cells at each timestep. Similarly, Lange et al.
(Lange et al., 2021) extend this idea using continuous
probabilities. Jain et al. advance this further with
DRF-Net (Jain et al., 2019), a ResNet-based model
that integrates semantic and dynamic information
into a 3D spatio-temporal tensor. Although precise
tracking is still required, the method exceeds the
previously best performance. As seen with Y-Net
(Mangalam et al., 2021), grid-based methods are
also used to model uncertainty where epistemic and
aleatoric uncertainties are distinguished, leading
to the assignment of long-term goals to individual
grid cells. Other models, such as HOME (Gilles
et al., 2021) and THOMAS (Gilles et al., 2022b),
utilize grid maps for efficient trajectory sampling.
Exploring Shared Gaussian Occupancies for Tracking-Free, Scene-Centric Pedestrian Motion Prediction in Autonomous Driving
101
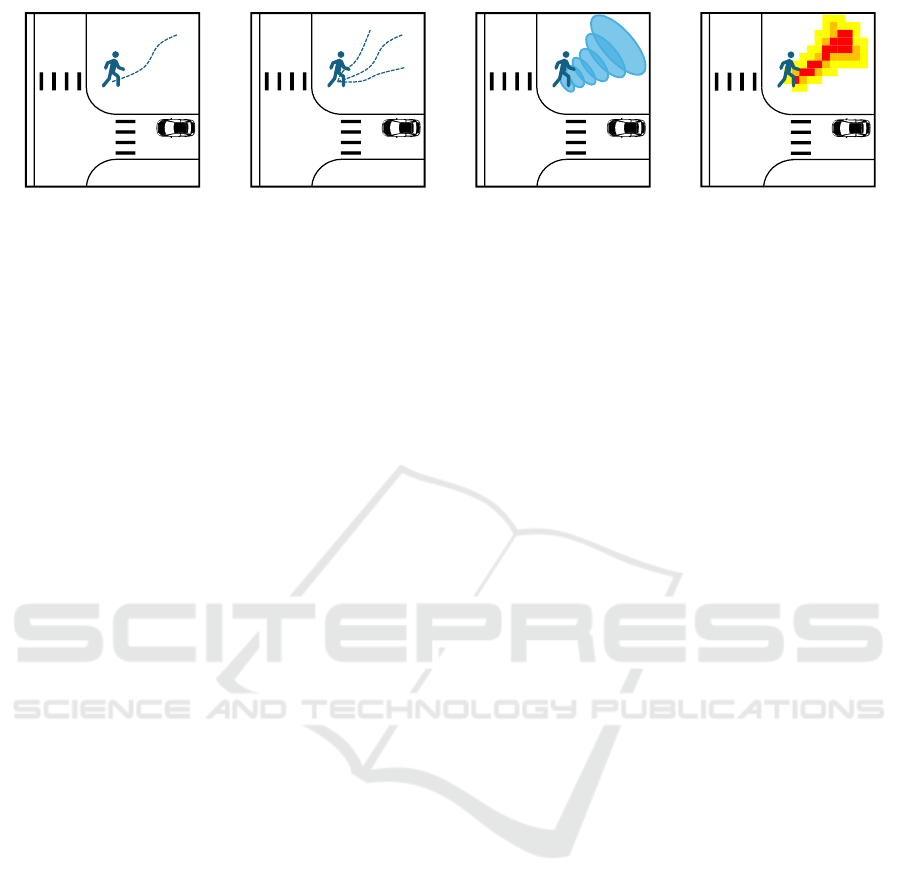
Unimodal Trajectories Multimodal Trajectories Multimodal Parametric
Distributions
Multimodal Non-
parametric Distributions
Figure 2: Overview of various unimodal and multimodal output representations. The two images on the left represent
trajectory-based methods, while the two on the right depict parametric and non-parametric occupancy approaches.
To enhance safety while still primarily predicting
detected objects in the whole scene, Luo et al. (Luo
et al., 2021) introduce a method to explicitly consider
undetected instances through a graph representation.
Moving to a scene-centric perspective, Toyungy-
ernsub et al. (Toyungyernsub et al., 2022) predict
occupancies from raw point clouds without requiring
object classifications. To separate dynamic from
static objects, a semantic segmentation process is
employed, followed by the prediction of moving
objects using the Dempster–Shafer Theory (DST).
Mahjourian et al. (Mahjourian et al., 2022) extend
this representation by proposing occupancy flow
fields to predict directional movements, enabling
collision-free path predictions for multiple agents.
While non-parametric methods provide a potential
framework for instance- and tracking-free develop-
ments, they are limited by the inherent inaccuracy of
discretized representations.
Parametric Prediction. Gaussian Mixture Mod-
els (GMMs) represent a parametric variant to occu-
pancy prediction methods, where spatial probabilities
are represented using Gaussian components, each de-
fined by their mean and standard deviation in a con-
tinuous 2D space (McLachlan and Basford, 1988).
These models capture spatial complexity within a
scene with fewer components and in a less sparse for-
mat, providing computational efficiency and high ac-
curacy compared to non-parametric approaches. As
such, they are often used as intermediate representa-
tions during the trajectory generation as seen in meth-
ods like Trajectron++ (Salzmann et al., 2020), Proph-
Net (Wang et al., 2023), and MTR++ (Shi et al.,
2024). In these approaches, Gaussian components are
estimated for each agent before sampling diverse tra-
jectories to produce multimodal outputs. While para-
metric models effectively integrate spatial uncertainty
(Wiest et al., 2012), their application to represent oc-
cupancies in an object-invariant, scene-centric man-
ner has yet to be explored.
3 METHODOLOGY
This section outlines our experiments, starting with
the problem formulation and the dataset preprocess-
ing. We then introduce our input features, the oc-
cupancy representation, and the model architecture.
Lastly, we explain the training procedure and evalu-
ation process, ensuring comparability with trajectory
prediction methods.
3.1 Problem Formulation
The problem of probabilistic pedestrian prediction is
defined as follows: Given a 2D map of the traffic
environment and sets of observed positions X
i
1:T
=
{p
i
1
, p
i
2
, . . . , p
i
T
} for B agents (i ∈ B) over time horizon
T , for each future timestep t predict the most likely
positions
ˆ
Y
1:D
t
= {p
1
t
, p
2
t
, . . . , p
D
t
} for A predictable
pedestrians represented by D probability distributions
where A ⊆ B. The idea is to combine pedestrians who
are in close proximity, modeling them with a single
distribution and avoiding unnecessarily detailed pre-
dictions. Each position at timestep t is parameterized
by Cartesian coordinates p
t
= {x
t
, y
t
} ∈ R
2
.
For predictable pedestrians, the observed time
horizon T contain ten entries sampled at 10 Hz re-
sulting in a motion history of one second. In accor-
dance with the Argoverse 2 motion forecasting chal-
lenge, predictions are generated for six seconds into
the future. While the available sampling frequency
equals 10 Hz, the ground-truth positions Y
1:A
T +1:T +T
p
=
{p
1
T +1:T +T
p
, p
2
T +1:T +T
p
, . . . , p
A
T +1:T +T
p
} are sampled
at the lower frequency of 1 Hz. This choice was made
given the lower velocities of pedestrians compared
to other traffic participants, balancing computational
load and accuracy, and to improve generalization by
preventing overfitting on the noisy data annotations.
As a result, the prediction horizon T
p
is defined by six
timesteps.
Simplifying the notation, X and Y represent the
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
102
observed and ground-truth trajectories, respectively,
and
ˆ
Y denotes the predicted future probability distri-
butions. The loss aims to minimize the distance be-
tween predicted distributions
ˆ
Y and ground-truth tra-
jectories Y for all predictable pedestrians.
3.2 Preprocessing and Input Features
We use a pedestrian benchmark (Uhlemann et al.,
2025) based on the Argoverse 2 Motion Forecasting
Dataset (Wilson et al., 2021) as it provides a diverse
and rich collection of pedestrian trajectories in urban
traffic environments. Since the provided data is in an
agent-centric format, the first step contained center-
ing the coordinate frame around the ego vehicle to
allow for the prediction of shared distributions. To
focus on relevant agents only, predictions are limited
to pedestrians within a 50 m radius of the ego vehi-
cle (Zhou et al., 2022). This range ensures a balance
between prediction accuracy and computational effi-
ciency, as it captures over 80 % of pedestrians. The
information for each agent is stored in a social ma-
trix of shape 33 × 21, where the first dimension cor-
responds to the maximum number of pedestrians ob-
served within that radius. The second dimension en-
codes the features for each agent i shown in Equation
1. Here, the agent type (pedestrian, vehicle, motorcy-
clist, cyclist, or bus) and the historical trajectory are
considered. To align with previous methods, the ob-
servation length is limited to ten timesteps, as this du-
ration is considered sufficient for the prediction task
(Ettinger et al., 2021).
[type
i
, x
i
T
, y
i
T
, x
i
T −1
, y
i
T −1
, . . . , x
i
T −9
, y
i
T −9
] (1)
The arrangement of the social matrix entries is de-
termined by sorting agents by type and their distance
from the ego vehicle (Uhlemann et al., 2025). This
ensures that predictable pedestrians are prioritized
for inclusion in the prediction process, followed by
other agents they may interact with. While this rep-
resentation relies on precise tracking, an alternative,
tracking-free method was implemented. In this ap-
proach, only three features [type
i
, x
i
t
, y
i
t
] are recorded
for each agent i at each timestep t, resulting in a ma-
trix of dimensions 10 × 33 × 3. Afterward, the ob-
served agents are sorted by distance from the ego at
each timestep, eliminating explicit object association.
To evaluate this method’s effectiveness and assess the
model’s reliance on tracking overall, a comparison
with a random sorting approach is conducted as well.
The map is represented using semantic polygons,
each defined by several edge vectors. Semantic types
include drivable areas, lane segments, and pedestrian
crossings. To consider this information, a map ma-
trix of dimensions 730× 6 is constructed, focusing on
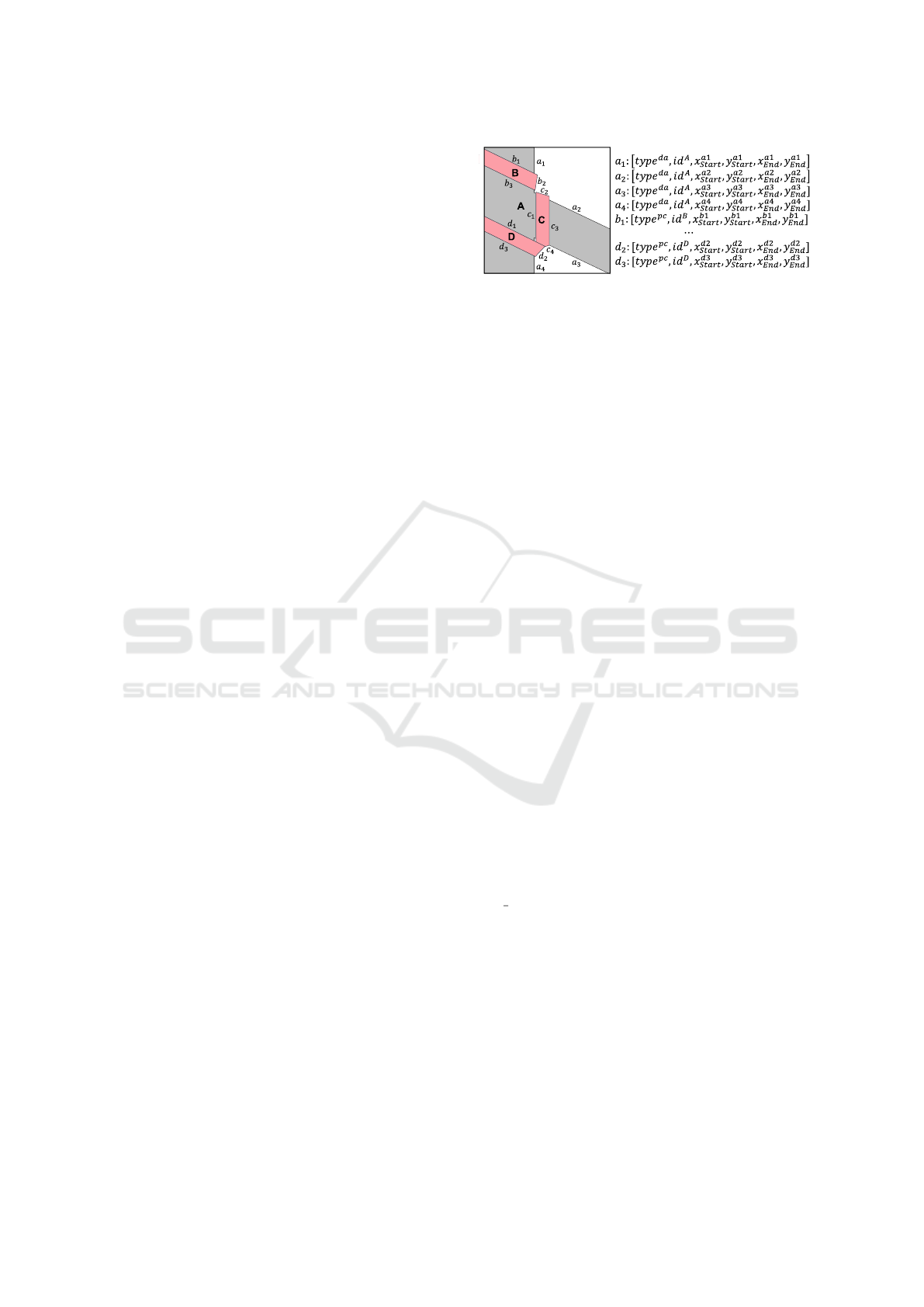
Figure 3: Example for a vectorized map as contained in the
Argoverse 2 dataset, depicting a grey polygon for the driv-
able area A and red ones for pedestrian crossings B, C, and
D. Corresponding edges for each polygon are depicted with
small letters. On the right side, the generated map feature
matrix used as input for our model is shown.
edges within a 70 m radius of the ego vehicle. This
radius builds on the 50 m radius of the social matrix,
with an extra 20 m to provide predictable pedestrians
with additional context. On average, 730 edges fall
within this range, determining the matrix’s first di-
mension. If more edges are present, only the 730 clos-
est are retained, sorted by distance to the ego vehicle.
The second dimension corresponds to the features of
each vector, which include the semantic type, the el-
ement id, and scene-centric x- and y-coordinates for
each edge’s start- and endpoints. Figure 3 illustrates
this representation alongside an exemplary map, with
a grey polygon for drivable area A and red ones for
crosswalks B, C, and D.
3.3 Occupancy Generation
As one of the main contributions of this work, we
introduce a concept for continuous, probabilistic oc-
cupancy prediction focused on both individuals and
object groups. Instead of learning distributions from
scratch, ground-truth clusters are generated as a ba-
sis for the training. Among various clustering meth-
ods (Rupali Nehete, 2016), the Density-Based Spatial
Clustering of Applications with Noise (DBSCAN)
algorithm (Ester et al., 1996) was selected for its
ability to identify clusters without prior knowledge
of their number. It requires only two parameters:
min samples, defining the minimum points for a clus-
ter, and eps, describing the maximum distance be-
tween two points in the same cluster. Inspired by
GMMs, each cluster is represented as a Gaussian dis-
tribution, with the mean and standard deviation de-
fined by its center and maximum spread. This is in
contrast to previous methods, where each individual
has a separate GMM assigned (Wiest et al., 2012;
Salzmann et al., 2020). Overall, this approach inte-
grates both, spatial uncertainty and enhanced robust-
ness against noisy training data into the predicted out-
put (Karle et al., 2022; Guo et al., 2019).
Ground-truth distributions are generated using
Exploring Shared Gaussian Occupancies for Tracking-Free, Scene-Centric Pedestrian Motion Prediction in Autonomous Driving
103
(a) Results for DBSCAN with eps = 1.5. The pedestrian
group only forms a cluster for the first two timesteps al-
though belonging together for the whole duration.
(b) Results for DBSCAN with eps = 2.0. The pedestrian
group is clustered together for all timesteps while still keep-
ing the individual to the left separate.
Figure 4: Comparison of outcomes for the DBSCAN clus-
tering algorithm with two different distance thresholds. The
scenarios depict three pedestrians visualized by red dots
crossing the road over a crosswalk.
DBSCAN with min
samples = 1 and eps = 2.0 de-
fined as Euclidean distance, ensuring agents within a
2 m radius are grouped while preserving sparsely pop-
ulated clusters. The 2 m radius was determined em-
pirically through observations, balancing meaningful
cluster formation while preserving distinct intentions
of individuals as shown in Figure 4. Here, three
pedestrians visualized with red dots cross the street
along a crosswalk, with two pedestrians belonging to
a group. While setting eps = 1.5 results only in partial
clusters being formed, eps = 2.0 combines the two
humans to a single distribution across all timesteps.
The last step involves determining the mean and
covariance of each cluster, such that a Gaussian distri-
bution can be formed. The location can be calculated
as the average of all positions within the cluster, while
the standard deviation can be obtained by the maxi-
mum distance (max) in the x- and y-directions from
the cluster center. Additionally, a margin of 0.5 m is
added to this value to incorporate a safety margin as
well as to account for the dimensions of human bod-
ies.
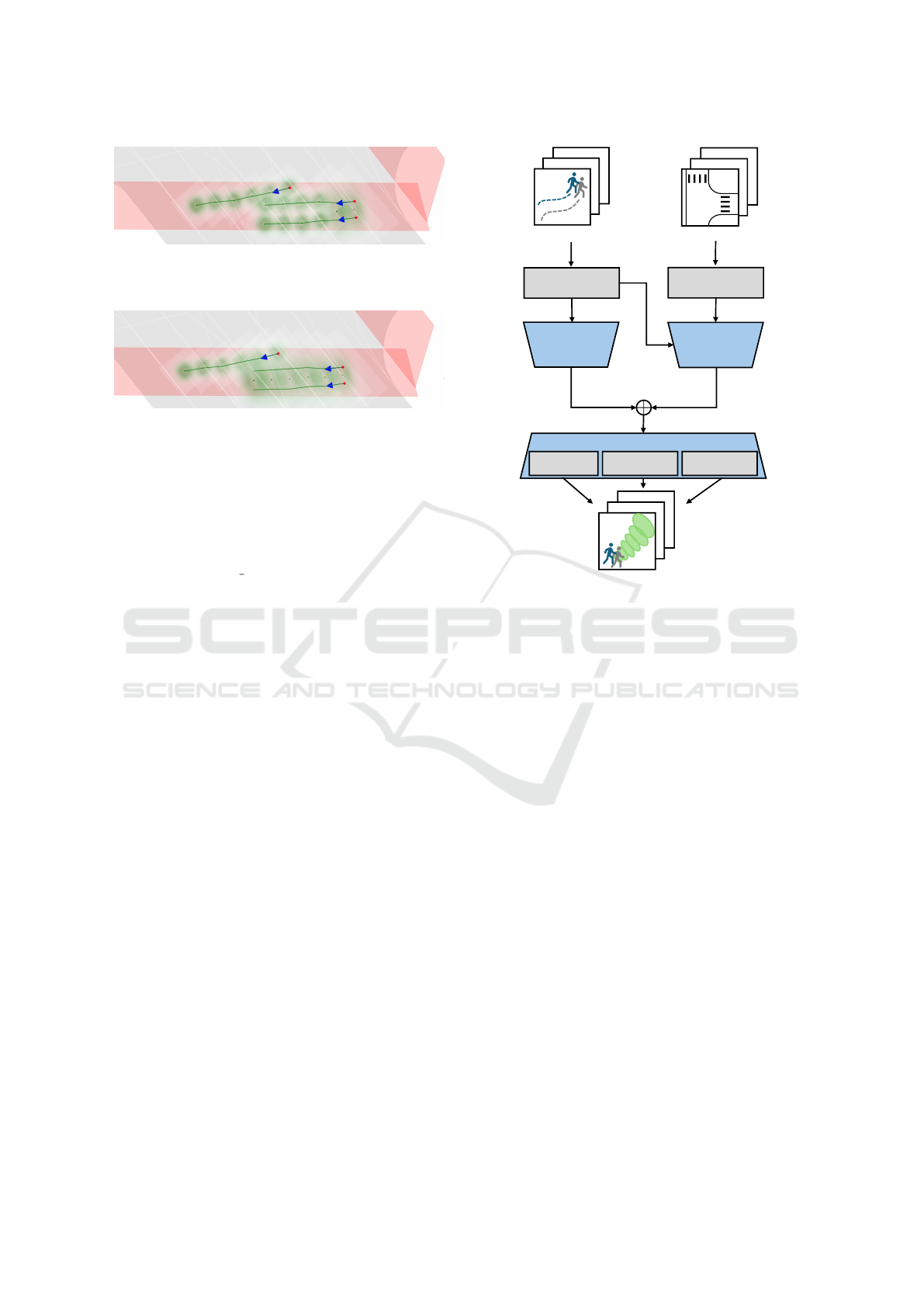
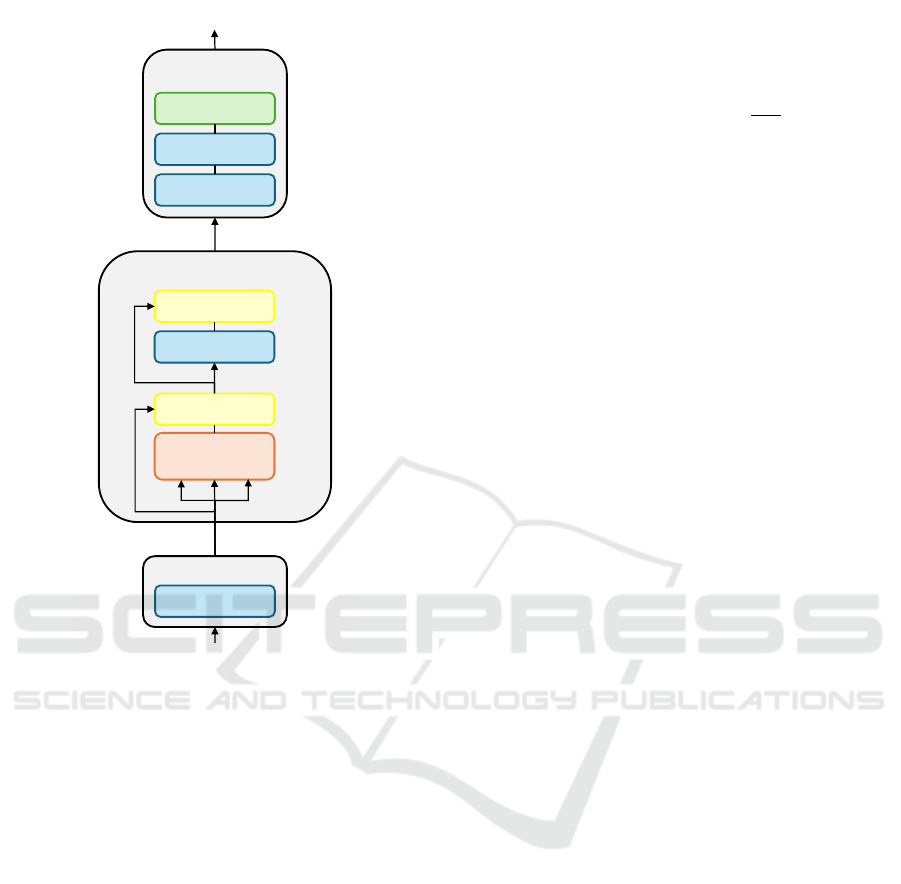
3.4 Model Architecture
To implement the model architecture, we follow pre-
vious approaches (Lan et al., 2024; Wang et al., 2023;
Salzmann et al., 2020), where two separate encoders
for social and semantic information are employed,
facilitating parallel encoding as shown in Figure 5.
The social encoder extracts the agent features and in-
Embedding
[N, 33, 128]
[N, 730, 128]
Query
[N, 2, 18, 18]
Concatenate
Predictions
[N, 33, 21]
Map Tensor
Social
Encoder
Map
Encoder
Embedding
Social Tensor
[N, 730, 6]
[N, 2, 18, 18]
[N, 4, 18, 18]
Probability
Decoder
Mean Scale
Figure 5: Overview of the proposed model architecture.
teractions from the social matrix (Yuan et al., 2021;
Zhou et al., 2023), while the map encoder extracts
spatial and semantic information from the map ma-
trix and models the agent-map interactions. The de-
coder receives the concatenated output of both en-
coders and predicts the agents’ future distributions for
the next six seconds using a fully-connected architec-
ture. Both encoders are inspired by Snapshot (Uhle-
mann et al., 2025), while the decoder is inspired by
HiVT (Zhou et al., 2022).
The social encoder is depicted in Figure 6 and em-
beds the input tensor via a fully-connected layer with
layer normalization, expanding the feature dimension
to 128. Multi-head self-attention is applied through a
single transformer layer with eight heads, incorporat-
ing skip connections, layer normalization, and linear
layers (Vaswani et al., 2017). After post-processing
to further embed relevant features, the dimension is
reduced to N × 2 × 18 × 18. The map encoder shares
the same architecture, with the only difference being
the use of a cross-attention module to both extract
semantic information and model agent-map dynam-
ics. Social embeddings act as queries, while map em-
beddings serve as keys and values (Uhlemann et al.,
2025; Zhou et al., 2023). For the tracking-free ver-
sion, both encoders require slight modifications due
to the differently shaped input tensor. Here, the input
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
104
Feature
Encoding
Transformer Layer
x L
Input Embedding
Social Tensor
[N, 33, 21]
Linear + Norm
Multi-Head
Attention
Linear + Norm
Linear + Norm
Conv + Norm
Add + Norm
Linear
Add + Norm
[N, 33, 128]
[N, 33, 128]
[N, 2, 18, 18]
Figure 6: Detailed architecture of the social encoder block.
tensor has the dimensions N × 10 × 33 × 3, which is
reshaped to N × 330 × 3 to align with the proposed
layout. Similarly, the output of the map encoder is
adapted to handle the N × 330 × 128 embedding for-
mat. After concatenating both encoder outputs along
the channel dimension, producing a tensor of shape
N × 4 × 18 × 18, the latent features are passed to the
decoder.
The decoder refines the latent representation
through an initial upsampling and encoding step
where a transposed convolution layer followed by
two convolutional layers in conjunction with batch
normalization are used. Afterward, two linear lay-
ers with layer normalization are employed for fea-
ture sharing before being fed into three separate feed-
forward stages to generate the existence probability,
mean, and scale parameter of each Gaussian distribu-
tion (Wang et al., 2023; Shi et al., 2024; Lin et al.,
2024). In contrast to traditional mixture models, we
allow the likelihood of each distribution to be within
[0, 1] to model individual occupancies, which is ac-
complished by using a sigmoid function. The output
dimensions of our model are N × D for distribution
probabilities, N × D × T
p
× 2 for their 2D positions,
and N × D × T
p
× 4 for the covariance matrix, ensur-
ing positive definiteness. The covariance matrix Σ is
parameterized as
σ
2
x
r
r σ
2
y
with ρ =
r
σ
x
σ
y
and r describ-
ing the covariance between x and y. With this setup,
our model has 585445 parameters in total.
3.5 Training Procedure
Using the generated ground-truth clusters as detailed
in Section 3.3, a direct comparison between clusters
and predicted distributions as seen in Figure 7 be-
comes possible. Here, three ground-truth positions
(red crosses) are represented by two ground-truth
clusters as depicted by the green ellipses around their
mean locations. Further, two predicted distributions
are visualized in blue and purple with corresponding
mean positions and covariances. While a direct com-
parison between ground-truth clusters and predicted
distributions is possible, the order of the predictions
should not influence the outcome.
To guarantee permutation invariance, we were in-
spired by object detection frameworks like DETR
(Carion et al., 2020) which use the Hungarian Al-
gorithm to match predicted and ground-truth bound-
ing boxes. Adopting this approach, a cost matrix is
created by calculating the pairwise distance between
each ground-truth cluster and the predicted ones. To
handle padded values and non-valid predictions with
probabilities below 0.5, we assign a value of 1 × 10
4
to these entries, encouraging associations between
non-valid elements. For the example in Figure 7, this
method would lead to a 2×2 cost matrix. After the as-
sociation is made through the Hungarian Algorithm,
the loss is computed by comparing ground-truth and
predicted distributions across three parameters: loca-
tions, covariances, and probabilities. Although we
initially considered the Kullback-Leibler divergence
for efficiency, its sensitivity to disjoint distributions
led us to separate the optimization of location and co-
variance. This results in a loss function with three
individual terms weighted by λ:
Loss = λ
loc
L
loc
+ λ
cov
L
cov
+ λ
pi
L
pi
(2)
The location loss L
loc
is computed as the Eu-
clidean distance for valid ground-truth clusters, while
the covariance loss L
cov
is optimized using the L2
norm over the variance and correlation dimensions
in x- and y-direction. Subsequently, these two terms
are averaged across all timesteps t and distributions
D. For the optimization of the probability loss L
pi
,
we compute the L1 distance between the ground-truth
Exploring Shared Gaussian Occupancies for Tracking-Free, Scene-Centric Pedestrian Motion Prediction in Autonomous Driving
105
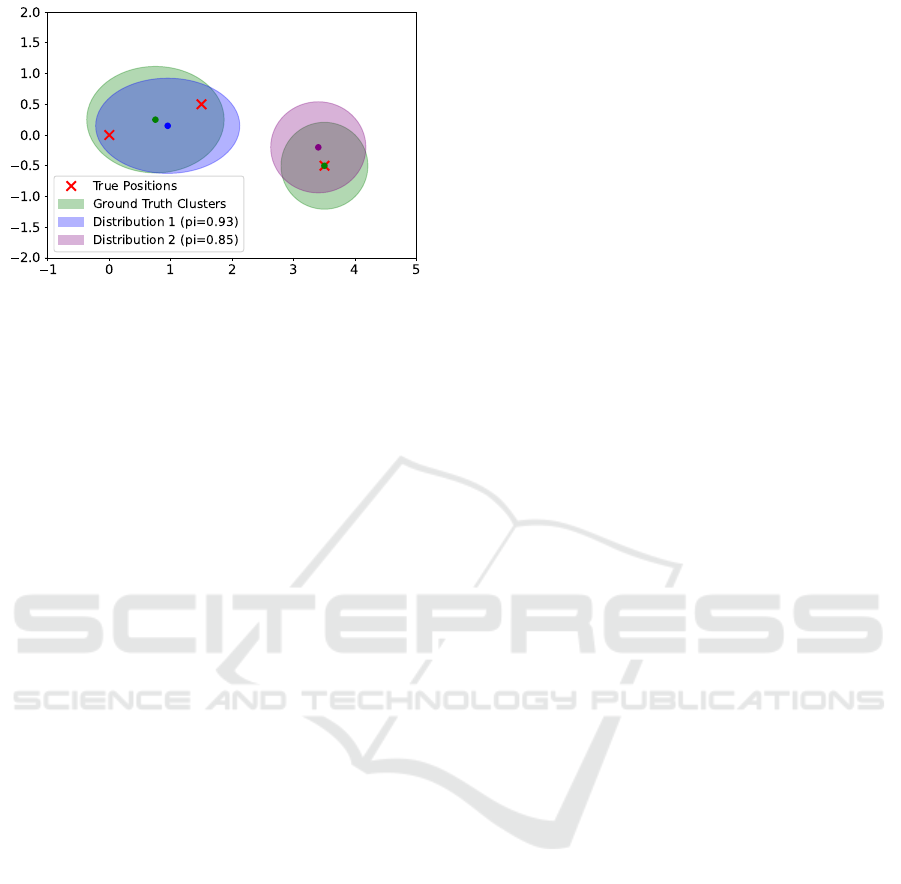
Figure 7: Exemplary ground-truth clusters and predicted
distributions. In this example, the left ground-truth cluster
should be associated to distribution 1, while the right should
be matched with distribution 2.
mask and predicted probabilities, guiding valid pre-
dictions toward one and padding toward zero. Rather
than calculating the average, we sum values across
distributions such that incorrect predictions have a
higher impact. For the example in Figure 7, the prob-
ability loss is given by L
pi
= (1−0.93)+(1−0.85) =
0.22.
To train the network, we choose a batch size of
128, balancing generalization and memory efficiency.
Starting with a learning rate of 6 × 10
−3
, the rate de-
cays if the validation loss shows no improvement over
five epochs. For the optimizer, we select AdamW
(Loshchilov and Hutter, 2019). Our framework is
developed in PyTorch (Paszke et al., 2019) utiliz-
ing a single NVIDIA Tesla V100 GPU with 16 GB
RAM. With this setup, the training terminated after
100 epochs on average.
3.6 Metrics and Evaluation
To evaluate the model’s performance, we use the Av-
erage Displacement Error (ADE) and Final Displace-
ment Error (FDE). The ADE measures the average
Euclidean distance between ground truth and predic-
tions across the prediction horizon, while FDE only
considers the final predicted position. For multimodal
predictors, we select the most likely of six predicted
trajectories to better represent a real-world applica-
tion rather than the Best-of-K approach as commonly
adopted. Additionally, we use the Miss Rate (MR)
to determine the quantity of predictions closely fol-
lowing the ground truth. Following the Argoverse 2
(Wilson et al., 2021) convention, we evaluate the MR
for the final timestep and define a miss if the pre-
diction is farther than two meters from the ground
truth. This aligns with group behavior dynamics as
agents can be clustered into one distribution within a
two-meter radius. Nevertheless, an implementation of
the MR averaged over all timesteps is also provided,
giving insight into the error accumulation over time.
To compare our framework with traditional methods
and observed ground-truth trajectories, we employ a
sampling-based approach drawing 50 random sam-
ples from each distribution at every timestep. After-
ward, for each ground-truth position we compute the
minimum and maximum distances to the nearest pre-
dicted distribution. This way, a broader measure of
distribution accuracy can be achieved since potential
false negatives are accounted for. Finally, using these
two distances, we calculate the four previously intro-
duced metrics for each scene, providing a more com-
prehensive comparison to trajectory-based prediction
methods.
4 RESULTS
After having presented our methodology, we now
compare our model to state-of-the-art prediction ap-
proaches given the metrics presented in Section
3.6. Alongside, we present the performance of the
tracking-free implementations and analyze two sce-
narios in a qualitative manner.
4.1 Quantitative Comparison
We evaluate our approach by comparing it to the
Constant Velocity (CV) baseline and the state-of-the-
art motion prediction models SIMPL (Zhang et al.,
2024), QCNet (Zhou et al., 2023), and Snapshot (Uh-
lemann et al., 2025). For better comparability, Snap-
shot is evaluated both at 10 Hz and 1 Hz. As previ-
ously mentioned, we report the accuracy of our model
based on the closest (min) and farthest (max) of 50
generated samples. Table 1 summarizes the results on
the test set of the Argoverse 2 pedestrian benchmark,
including the three model variations outlined in Sec-
tion 3.2: Randomly sorted social inputs (No Tracking
& Sorting), inputs sorted by distance without explicit
object association (No Tracking), and inputs incorpo-
rating tracked object histories.
Focusing on the tracking-based model, being
shown in the last two rows of the chart, a spread
of approximately 0.8 m is observed between the min
and max ADE and FDE values, a range consis-
tent across all model variations. While this behav-
ior is discussed further in Section 5, we use the
minimal values as a proxy for the overall accuracy
when compared to trajectory-based methods. In terms
of ADE, our model scores last with an average er-
ror of 0.877 m, falling behind the CV baseline with
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
106
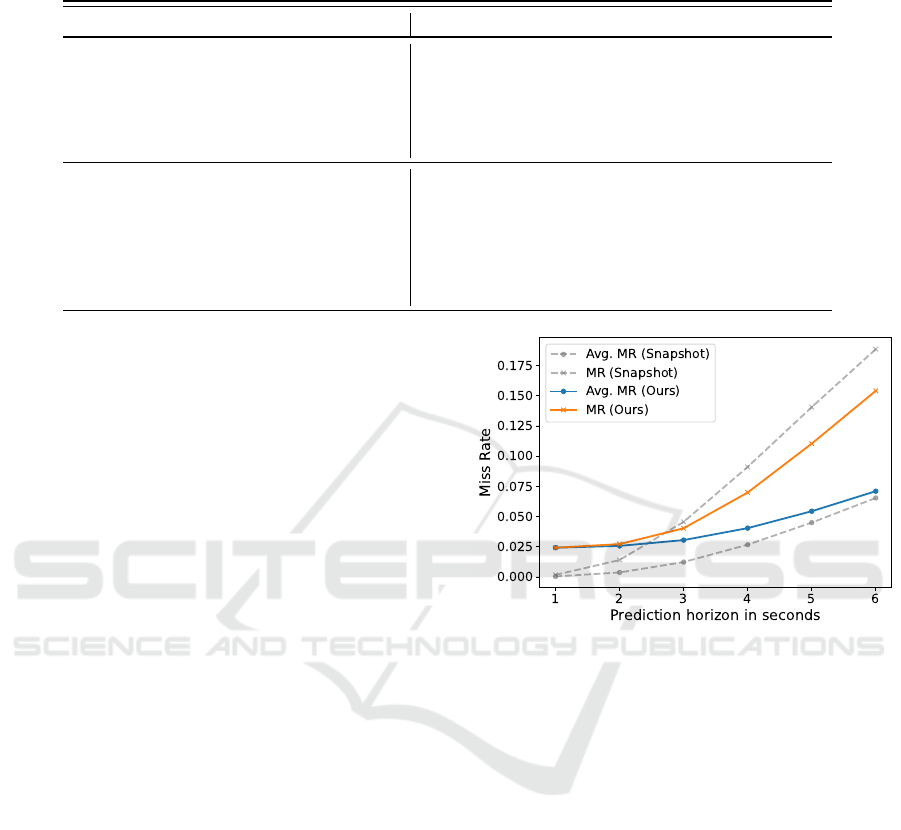
Table 1: Performance of different models as well as variations of our approach on the Argoverse 2 pedestrian benchmark. All
models in the top section of the chart are evaluated at 10 Hz unless stated otherwise.
Model ADE in m ↓ FDE in m ↓ Avg. MR ↓ MR ↓
CV 0.793 1.776 0.096 0.279
SIMPL (Zhang et al., 2024) 0.699 1.557 - 0.243
QCNet (Zhou et al., 2023) 0.693 1.474 - 0.217
Snapshot (1 Hz) (Uhlemann et al., 2025) 0.664 1.255 0.080 0.189
Snapshot (Uhlemann et al., 2025) 0.567 1.255 0.065 0.189
Ours (max) - No Tracking - No Sorting 2.316 2.938 0.376 0.521
Ours (min) - No Tracking - No Sorting 1.529 2.058 0.220 0.329
Ours (max) - No Tracking 1.731 2.291 0.215 0.371
Ours (min) - No Tracking 0.977 1.412 0.099 0.193
Ours (max) 1.651 2.129 0.194 0.337
Ours (min) 0.877 1.248 0.071 0.154
(0.793 m). The best results are achieved by Snap-
shot with 0.567 m, while the other models consis-
tently score below 0.7 m. However, when Snapshot
is evaluated at 1 Hz, the gap to our model narrows to
0.21 m, suggesting that its accuracy partly arises from
noise modeling at higher sampling rates. For the FDE,
the results differ: Here, our approach matches Snap-
shot with a slight advantage. This difference is fur-
ther highlighted in the MR metric, where our model
achieves the best performance by a significant mar-
gin, indicating its ability to capture overall dynamics
despite limitations in replicating precise trajectories.
Lastly, although Snapshot achieves the highest aver-
age MR at 10 Hz, our model excels again when it is
evaluated at the same sampling frequency of 1 Hz.
Examining the model variants shown in the last
six rows of Table 1, the model incorporating tracked
object histories achieves the best results. The No
Tracking variant, which sorts agents by distance, per-
forms comparably well, with a difference in ADE of
just 0.1 m and 0.164 m for the FDE, outperforming
QCNet. When considering the MR, while still lack-
ing behind the first version of our model, it achieves
a similar performance to Snapshot. In contrast, the
No Tracking & Sorting variation, using randomly dis-
tributed agents in the input tensor, performs signifi-
cantly worse for all metrics, with ADE and FDE val-
ues of 1.529 m and 2.058 m, respectively. Scoring
consistently lower than the CV baseline, it suggests
that the model struggles to predict accurate pedestrian
locations and actions, performing similar to the max-
imum values of the tracking-based version.
To better compare the performance of our occu-
pancy representation with trajectory prediction meth-
ods, we analyze the accuracy with respect to the MR
and the averaged MR for different prediction hori-
zons, as shown in Figure 8. Here, the accuracy
of our method is plotted with colored graphs, while
Figure 8: Prediction accuracy reported by the MR and the
average MR over the next 6 s for our method and Snapshot.
Snapshot’s scores are plotted in grey as a reference.
For predictions one second into the future, Snap-
shot achieves a near-perfect score for both metrics,
while our method shows a MR of 2.4 %. However,
at six seconds ahead, our model demonstrates a sim-
ilar average MR and outperforms Snapshot with re-
spect to the MR. Analyzing the overall trend of the
graphs, both models exhibit a constant incline over
time. However, Snapshot’s incline is steeper and be-
gins approximately one second earlier, resulting in a
higher MR starting from three seconds onward. For
the average MR, which aggregates results across all
previous timesteps, Snapshot benefits from its previ-
ously low values. Nonetheless, the results for the MR
indicate that the predicted occupancies can more ef-
fectively capture the future motion dynamics within
the observed scenes.
Exploring Shared Gaussian Occupancies for Tracking-Free, Scene-Centric Pedestrian Motion Prediction in Autonomous Driving
107

4.2 Qualitative Comparison
In this section, representative scenarios are examined
to gain deeper insights into the models’ behaviors and
to explore potential causes for the performance differ-
ences observed. Figure 9 illustrates two scenarios in-
volving pedestrians at intersections, featuring static,
linear, and non-linear motion patterns. In the first
scenario depicted on top, four pedestrians can and
are being predicted. The static pedestrian near the
right crosswalk is correctly anticipated as such, while
the group of pedestrians walking downward is repre-
sented by a shared linear distribution, accurately cap-
turing their group behavior. Although the prediction
slightly overestimates their speed, it successfully re-
flects their intention and is more accurate than Snap-
shot. However, the pedestrian at the top, exhibiting
starkly non-linear movement, is not accurately cap-
tured by either model, highlighting a general chal-
lenge in predicting such actions solely based on the
observed motion history.
In the second scenario, eight predictable pedestri-
ans are contained, which all are more or less repre-
sented by a distribution. Starting with the dynamic
pedestrians along the crosswalks, the top and bottom
ones’ directions are accurate but the speed is slightly
too fast. The pedestrian on the right, cutting cor-
ners to cross the top crosswalk, is more challeng-
ing to predict. Both models handle the initial two
timesteps well but fail to anticipate the directional
change. For the pedestrian in the top left, while the
predicted speed is still slightly too fast, our model
captures the action again more accurately than Snap-
shot. At the bottom right, three pedestrians, which
could have been combined into a single distribution
based on the ground truth, are instead predicted by
three individual distributions. Although not ideal,
this still reflects their intentions and does not pose
safety risks. However, the static pedestrian at the top
right, though correctly identified, is represented with
a distribution slightly shifted from its actual position.
While such shifts could be safety-critical near the ego
vehicle, we observe them only for more distant pre-
dictions, likely due to the scene-centric representation
used. In summary, our model performs well in most
cases, particularly for linear and static motion, though
predictions are sometimes slightly too fast or not op-
timally combined. For non-linear cases, where even
trajectory prediction models struggle, our approach
also encounters challenges, indicating inherent diffi-
culties in anticipating complex motion patterns based
on the provided data.
Figure 9: Two scenarios from the Argoverse 2 dataset, de-
picting predicted pedestrians visualized by red dots around
intersections. In both cases, the ground-truth distributions
and ground-truth trajectories are highlighted in green, while
the predicted distributions are marked in black. As refer-
ence, agent headings are indicated by blue arrows and pre-
dicted trajectories from Snapshot are shown in orange.
5 DISCUSSION
Based on the previous findings, this section discusses
our methodology and results in three key aspects: (1)
the evaluation of our occupancy representation com-
pared to traditional trajectory prediction methods, (2)
the applicability of our approach based on its accuracy
and runtime, and (3) the strengths and weaknesses of
employing a tracking-free approach, along with po-
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
108

tential areas for improvement.
5.1 Evaluation Procedure
As shown in Table 1, we use a min-max strategy
to quantify the variability in values predicted by our
occupancy method for a single individual. Across
all model variations, a moderate spread of approx-
imately 0.8 m for ADE and FDE can be observed,
which is consistent with our expectations. For single-
agent scenarios, even with perfect predictions, a de-
fault spread of 0.4 m arises from the safety margin
introduced during ground-truth generation in Section
3.3. For the multi-agent case, considering the com-
bined distribution of two pedestrians with a maximum
standard deviation of 1.5 m for eps = 2.0, a spread of
around 1.12 m is expected. Hence, the difference of
0.8 m indicates the tendency to predict bigger, shared
clusters, aligning with the intended outcome of our
approach. While the maximum distance quantifies
the distributions’ spread with respect to a single in-
dividual, it provides limited information about overall
accuracy, as some variability is inherent when com-
bining individuals into a shared distribution. There-
fore, a more suitable evaluation would quantify the
minimum and maximum values considering all agents
captured by a given Gaussian. As a result, focusing
on the minimal values for the comparison conducted
in this study offers a sufficient measure of accuracy.
Additionally, the fixed sample size of 50 provides
a built-in regularization, as smaller distributions are
more likely to yield smaller min values, while larger
distributions reduce this likelihood.
5.2 Model Performance
The qualitative analysis of the scenarios in Figure 9
shows that more straightforward linear or static cases
are generally well captured, albeit not always per-
fectly combined. However, more dynamic scenarios
present challenges, as our method, as well as compa-
rable trajectory prediction methods, struggle to antic-
ipate complex motion patterns based on the provided
data. These findings align with the quantitative re-
sults in Section 4.1, showing that while trajectory pre-
diction models exhibit low ADE values due to their
detailed output representation, our approach captures
the overall scene dynamics equally well, offering a
comparable or better FDE and MR. Therefore, incor-
porating additional contextual cues or raw sensor data
might be necessary as neither model architecture nor
output representation seems to make a difference. Re-
gardless, as our model is technically still an unimodal
predictor, the uncertainty-based occupancy modeling
seems to enhance the safety for vulnerable road users,
as the MR is notably improved for prediction horizons
beyond 2 s shown in Figure 8. For a practical applica-
tion though, it needs to be guaranteed that each pedes-
trian is covered at least by one predicted distribution
as highlighted in Figure 9.
Besides accuracy, the inference speed of our ap-
proach is important to allow for real-time predic-
tions. Here, we measured an average inference time
of 8.97 ms on a NVIDIA Tesla V100 GPU to pre-
dict the whole scene. Thanks to the scene-centric
representation, this value remains constant regardless
of the number of agents, as predictions are gener-
ated in parallel. While the presented method accom-
modates 33 agents only, this framework can easily
be extended due to the flexible input structure em-
ployed. Although the current performance already
meets the requirements of real-time systems operat-
ing at 10 Hz, further optimizations, such as an im-
proved preprocessing or a low-level implementation
promise further enhancements. Moreover, the abil-
ity to predict shared distributions contributes to the
scalability of our method. While the groups in Fig-
ures 9 (top) and 11 are successfully combined, reduc-
ing computational load, the three static individuals in
Figure 9 (bottom) provide an exception. We noticed
that these typically occur for agent groups either far-
ther from the ego vehicle, or containing more than
two entities. The former is likely due to less accurate
observations at greater distances, while the latter re-
flects the rarity of larger groups in the dataset. Hence,
to address these limitations, alternative datasets with
more diverse scenarios need to be explored. Despite
these challenges, the results demonstrate the viability
of this approach as a foundation for future work.
5.3 Tracking-Free Approach
The results in Table 1 indicate that both tracking-free
implementations cannot match the version utilizing
tracked inputs, but we think that the underlying rea-
sons differ. The random-ordering variant performs the
worst, which is expected: Although transformer ar-
chitectures are permutation-invariant (Vaswani et al.,
2017), the input order matters during the embedding
generation performed by the fully connected layer
employed. While this might be partially compen-
sated for in the training process, architectural changes
would be required to handle these inputs effectively.
Therefore, sorting by distance offers a practical com-
promise by enforcing a deterministic input order,
scoring only slightly below the tracked implemen-
tation and requiring little computational overhead.
While this could be seen as a form of tracking as of-
Exploring Shared Gaussian Occupancies for Tracking-Free, Scene-Centric Pedestrian Motion Prediction in Autonomous Driving
109

ten the distance between individuals and the AV re-
mains consistent for several observations, that is not
the case as no explicit object associations are made
across timesteps. Remarkably, although this variant
does not match the tracked version’s MR, its perfor-
mance remains comparable to, or better than, all tra-
jectory prediction methods evaluated. Therefore, it
offers a promising and practically viable option for
future developments.
The reasons for this performance can be found in
Figure 11, comparing the prediction outcomes of the
three variations side by side. Starting with the bottom
one showcasing the tracked version, the predicted dis-
tributions almost perfectly match ground-truth ones.
This becomes a bit worse when only sorting is used
as shown in the center image. Although the individ-
ual is still accurately predicted, the group dynamics
are slightly off while still being correctly summarized.
On the contrary, the model using randomly ordered
agents does not recognize the group at all, only pre-
dicting the two pedestrians in the top. While we al-
ready covered the cause for this behavior above, we
observe that the sorting variant seems to have difficul-
ties associating cluster centers and motion for groups
larger than two. This is likely due to the limited
samples available for such groups and the continu-
ous scene-centric representation, making it difficult
for the model to generalize for these cases. With suf-
ficient data, this performance gap could potentially
be closed. Besides, future improvements might in-
clude tailored training strategies, architectural modifi-
cations to enhance the feature sharing during the em-
bedding, or alternative scene representations. Here,
object locations could serve as anchors for distribu-
tions, simplifying the cluster assignment.
6 CONCLUSIONS
This work introduces a promising framework for
tracking-free, shared probabilistic occupancy predic-
tion. While not the most accurate in terms of ADE,
our method outperforms trajectory-based approaches
in FDE and MR, effectively capturing scene dynam-
ics and unpredictable behaviors to enhance safety.
Due to its scene-centric design and the prediction of
shared group distributions, an average inference time
of 8.97 ms per scene is achieved. While the absence
of tracked motion results in a slight performance
drop, a competitive MR compared to other models is
achieved, highlighting its potential. Future improve-
ments could focus on incorporating contextual data
(e.g., traffic light states, raw point clouds) and refin-
ing the input representation for improved handling of
Figure 10: Comparison of all three model variations for
a single scenario, being random sorting, distance-based
sorting, and tracking implementation from top to bottom.
Here, ground-truth distributions and trajectories are shown
in green, whereas predicted distributions are highlighted in
black. As a reference, Snapshot’s predictions are marked in
orange.
tracking-free features.
ACKNOWLEDGMENTS
As the first author, Nico Uhlemann initiated the idea
of this paper and contributed essentially to its concep-
tion, implementation, and content creation. Melina
W
¨
ordehoff made vital contributions during the de-
sign, implementation and analysis of the proposed
approach. Markus Lienkamp shaped the research
project and critically revised the outlined work. As a
guarantor, he accepts responsibility for the overall in-
tegrity of the paper. This research was funded by the
Central Innovation Program (ZIM) under grant No.
KK5213703GR1.
REFERENCES
Becker, S., Hug, R., H
¨
ubner, W., and Arens, M. (2019).
Red: A simple but effective baseline predictor for
the trajnet benchmark. In Computer Vision – ECCV
2018 Workshops, pages 138–153. Springer Interna-
tional Publishing.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
110

Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kir-
illov, A., and Zagoruyko, S. (2020). End-to-end ob-
ject detection with transformers. In Computer Vi-
sion – 16th European Conference, Proceedings Part I,
volume 12346, pages 213–229. Springer International
Publishing and Imprint Springer.
Ester, M., Kriegel, H.-P., Sander, J., and Xu, X. (1996).
A density-based algorithm for discovering clusters in
large spatial databases with noise. In KDD’96: Pro-
ceedings of the Second International Conference on
Knowledge Discovery and Data Mining, pages 226–
231. AAAI Press.
Ettinger, S., Cheng, S., Caine, B., Liu, C., Zhao, H., Prad-
han, S., Chai, Y., Sapp, B., Qi, C., Zhou, Y., Yang, Z.,
Chouard, A., Sun, P., Ngiam, J., Vasudevan, V., Mc-
Cauley, A., Shlens, J., and Anguelov, D. (2021). Large
scale interactive motion forecasting for autonomous
driving : The waymo open motion dataset. In 2021
IEEE/CVF International Conference on Computer Vi-
sion, Proceedings, pages 9690–9699. IEEE.
Gilles, T., Sabatini, S., Tsishkou, D., Stanciulescu, B.,
and Moutarde, F. (2021). Home: Heatmap output
for future motion estimation. In 2021 IEEE Interna-
tional Intelligent Transportation Systems Conference
(ITSC), pages 500–507. IEEE.
Gilles, T., Sabatini, S., Tsishkou, D., Stanciulescu, B.,
and Moutarde, F. (2022a). Gohome: Graph-oriented
heatmap output for future motion estimation. In 2022
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 9107–9114. IEEE.
Gilles, T., Sabatini, S., Tsishkou, D., Stanciulescu, B., and
Moutarde, F. (2022b). THOMAS: Trajectory heatmap
output with learned multi-agent sampling. In Interna-
tional Conference on Learning Representations.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2020). Generative adversarial networks. Com-
mun. ACM, 63:139–144.
Gulzar, M., Muhammad, Y., and Muhammad, N. (2021). A
survey on motion prediction of pedestrians and vehi-
cles for autonomous driving. IEEE Access, 9:137957–
137969.
Guo, Y., Kalidindi, V. V., Arief, M., Wang, W., Zhu, J.,
Peng, H., and Zhao, D. (2019). Modeling multi-
vehicle interaction scenarios using gaussian random
field. In 2019 IEEE Intelligent Transportation Sys-
tems Conference, pages 3974–3980. IEEE.
Gupta, A., Johnson, J., Fei-Fei, L., Savarese, S., and
Alahi, A. (2018). Social gan: Socially acceptable
trajectories with generative adversarial networks. In
2018 IEEE/CVF Conference on Computer Vision and
Pattern Recognition, Proceedings, pages 2255–2264.
IEEE.
Huang, R., Zhuo, G., Xiong, L., Lu, S., and Tian, W. (2023).
A review of deep learning-based vehicle motion pre-
diction for autonomous driving. Sustainability, page
14716.
Huang, Y., Du, J., Yang, Z., Zhou, Z., Zhang, L., and Chen,
H. (2022). A survey on trajectory-prediction methods
for autonomous driving. IEEE Transactions on Intel-
ligent Vehicles, 7(3):652–674.
Hussain, R. and Zeadally, S. (2019). Autonomous cars: Re-
search results, issues, and future challenges. IEEE
Communications Surveys & Tutorials, 21(2):1275–
1313.
Jain, A., Casas, S., Liao, R., Xiong, Y., Feng, S., Segal,
S., and Urtasun, R. (2019). Discrete residual flow for
probabilistic pedestrian behavior prediction. In Con-
ference on Robot Learning.
Karle, P., Geisslinger, M., Betz, J., and Lienkamp, M.
(2022). Scenario understanding and motion predic-
tion for autonomous vehicles—review and compari-
son. IEEE Transactions on Intelligent Transportation
Systems, 23(10):16962–16982.
Kosaraju, V., Sadeghian, A., Mart
´
ın-Mart
´
ın, R., Reid,
I., Rezatofighi, S. H., and Savarese, S. (2019).
Social-BiGAT: multimodal trajectory forecasting us-
ing bicycle-GAN and graph attention networks. Cur-
ran Associates Inc.
Lan, Z., Jiang, Y., Mu, Y., Chen, C., and Li, S. E. (2024).
SEPT: Towards efficient scene representation learning
for motion prediction. In The Twelfth International
Conference on Learning Representations.
Lange, B., Itkina, M., and Kochenderfer, M. J. (2021). At-
tention augmented convlstm for environment predic-
tion. 2021 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), pages 1346–
1353.
Lefevre, S., Vasquez, D., and Laugier, C. (2014). A survey
on motion prediction and risk assessment for intelli-
gent vehicles. Robomech Journal, 1.
Lin, L., Lin, X., Lin, T., Huang, L., Xiong, R., and
Wang, Y. (2024). Eda: Evolving and distinct an-
chors for multimodal motion prediction. Proceed-
ings of the AAAI Conference on Artificial Intelligence,
38(4):3432–3440.
Loshchilov, I. and Hutter, F. (2019). Decoupled weight
decay regularization. In International Conference on
Learning Representations.
Luo, K., Casas, S., Liao, R., Yan, X., Xiong, Y., Zeng, W.,
and Urtasun, R. (2021). Safety-oriented pedestrian oc-
cupancy forecasting. In 2021 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 1015–1022.
Mahjourian, R., Kim, J., Chai, Y., Tan, M., Sapp, B.,
and Anguelov, D. (2022). Occupancy flow fields
for motion forecasting in autonomous driving. IEEE
Robotics and Automation Letters, 7(2):5639–5646.
Mangalam, K., An, Y., Girase, H., and Malik, J. (2021).
From goals, waypoints & paths to long term human
trajectory forecasting. In 2021 IEEE/CVF Interna-
tional Conference on Computer Vision, Proceedings,
pages 15213–15222. IEEE.
McLachlan, G. J. and Basford, K. E. (1988). Mixture
models: Inference and applications to clustering, vol-
ume 84. Dekker.
Mohamed, A., Zhu, D., Vu, W., Elhoseiny, M., and Claudel,
C. (2022). Social-implicit: Rethinking trajectory pre-
diction evaluation and the effectiveness of implicit
maximum likelihood estimation. In Computer Vision
Exploring Shared Gaussian Occupancies for Tracking-Free, Scene-Centric Pedestrian Motion Prediction in Autonomous Driving
111

– 17th European Conference, Proceedings, Part XXII,
page 463–479. Springer-Verlag.
Ngiam, J., Caine, B., Vasudevan, V., Zhang, Z., Chiang, H.-
T. L., Ling, J., Roelofs, R., Bewley, A., Liu, C., Venu-
gopal, A., Weiss, D., Sapp, B., Chen, Z., and Shlens, J.
(2022). Scene transformer: A unified architecture for
predicting multiple agent trajectories. In The Tenth In-
ternational Conference on Learning Representations.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., Desmaison, A., Kopf, A., Yang, E., De-
Vito, Z., Raison, M., Tejani, A., Chilamkurthy, S.,
Steiner, B., Fang, L., Bai, J., and Chintala, S. (2019).
Pytorch: An imperative style, high-performance deep
learning library. In Advances in Neural Information
Processing Systems, volume 32. Curran Associates,
Inc.
Ridel, D., Deo, N., Wolf, D., and Trivedi, M. (2020).
Scene compliant trajectory forecast with agent-centric
spatio-temporal grids. IEEE Robotics and Automation
Letters, 5(2):2816–2823.
Ridel, D. A., Rehder, E., Lauer, M., Stiller, C., and Wolf,
D. F. (2018). A literature review on the prediction of
pedestrian behavior in urban scenarios. 21st Interna-
tional Conference on Intelligent Transportation Sys-
tems (ITSC), pages 3105–3112.
Rudenko, A., Palmieri, L., Doellinger, J., Lilienthal, A.,
and Arras, K. (2021). Learning occupancy priors of
human motion from semantic maps of urban environ-
ments. IEEE Robotics and Automation Letters, pages
1–1.
Rupali Nehete, Y. G. (2016). A survey on trajectory cluster-
ing models. National Conference on Advancements in
Computer & Information Technology, (1):20–24.
Salzmann, T., Ivanovic, B., Chakravarty, P., and Pavone,
M. (2020). Trajectron++: Dynamically-feasible tra-
jectory forecasting with heterogeneous data. In Com-
puter Vision – 16th European Conference, Proceed-
ings, volume 12363, pages 683–700. Springer Inter-
national Publishing.
Schuetz, E. and Flohr, F. B. (2024). A review of trajec-
tory prediction methods for the vulnerable road user.
Robotics, 13(1):1.
Shi, S., Jiang, L., Dai, D., and Schiele, B. (2024). Mtr++:
Multi-agent motion prediction with symmetric scene
modeling and guided intention querying. IEEE trans-
actions on pattern analysis and machine intelligence,
46(5):3955–3971.
Sohn, K., Yan, X., and Lee, H. (2015). Learning structured
output representation using deep conditional gener-
ative models. In Proceedings of the 28th Interna-
tional Conference on Neural Information Processing
Systems, page 3483–3491. MIT Press.
Toyungyernsub, M., Yel, E., Li, J., and Kochenderfer, M. J.
(2022). Dynamics-aware spatiotemporal occupancy
prediction in urban environments. In 2022 IEEE/RSJ
International Conference on Intelligent Robots and
Systems (IROS), pages 10836–10841.
Uhlemann, N., Fent, F., and Lienkamp, M. (2024). Eval-
uating pedestrian trajectory prediction methods with
respect to autonomous driving. IEEE Transactions
on Intelligent Transportation Systems, 25(10):13937–
13946.
Uhlemann, N., Zhou, Y., Mohr, T., and Lienkamp, M.
(2025). Snapshot: Towards application-centered mod-
els for pedestrian trajectory prediction in urban traffic
environments. In Proceedings of the IEEE/CVF Win-
ter Conference on Applications of Computer Vision
Workshops. IEEE.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L., and Polosukhin, I.
(2017). Attention is all you need. In 31st Conference
on Neural Information Processing Systems.
Wang, X., Su, T., Da, F., and Yang, X. (2023). Proph-
net: Efficient agent-centric motion forecasting with
anchor-informed proposals. In 2023 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
Proceedings, pages 21995–22003. IEEE.
Wiest, J., Hoffken, M., Kresel, U., and Dietmayer, K.
(2012). Probabilistic trajectory prediction with gaus-
sian mixture models. In 2012 IEEE Intelligent Vehi-
cles Symposium (IV 2012), pages 141–146. IEEE.
Wilson, B., Qi, W., Agarwal, T., Lambert, J., Singh, J.,
Khandelwal, S., Pan, B., Kumar, R., Hartnett, A.,
Pontes, J. K., Ramanan, D., Carr, P., and Hays, J.
(2021). Argoverse 2: Next generation datasets for
self-driving perception and forecasting. In Proceed-
ings of the Neural Information Processing Systems
Track on Datasets and Benchmarks.
Yao, Y., Atkins, E., Johnson-Roberson, M., Vasudevan, R.,
and Du, X. (2021). Bitrap: Bi-directional pedes-
trian trajectory prediction with multi-modal goal es-
timation. IEEE Robotics and Automation Letters,
6(2):1463–1470.
Yuan, Y., Weng, X., Ou, Y., and Kitani, K. (2021). Agent-
former: Agent-aware transformers for socio-temporal
multi-agent forecasting. In 2021 IEEE/CVF Interna-
tional Conference on Computer Vision: ICCV 2021,
Proceedings, pages 9793–9803. IEEE.
Zamboni, S., Kefato, Z. T., Girdzijauskas, S., Nor
´
en, C.,
and Dal Col, L. (2022). Pedestrian trajectory pre-
diction with convolutional neural networks. Pattern
Recognition, 121:108252.
Zhang, L., Li, P., Liu, S., and Shen, S. (2024). Simpl:
A simple and efficient multi-agent motion prediction
baseline for autonomous driving. IEEE Robotics and
Automation Letters, 9(4):3767–3774.
Zhao, H. and Wildes, R. P. (2021). Where are you heading?
dynamic trajectory prediction with expert goal exam-
ples. In 2021 IEEE/CVF International Conference on
Computer Vision (ICCV), pages 7609–7618.
Zhou, Z., Wang, J., Li, Y.-H., and Huang, Y.-K.
(2023). Query-centric trajectory prediction. In 2023
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition Proceedings, pages 17863–17873.
IEEE.
Zhou, Z., Ye, L., Wang, J., Wu, K., and Lu, K. (2022).
Hivt: Hierarchical vector transformer for multi-agent
motion prediction. In 2022 IEEE/CVF Conference on
Computer Vision and Pattern Recognition, Proceed-
ings, pages 8813–8823. IEEE.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
112
