
Real-Time Cyclist Prioritization with Fuzzy Logic-Based Signal
Control
Sarah Salem
a
, Pascal Leone
b
and Axel Leonhardt
c
Institute of Transport and Spatial Planning, University of the Bundeswehr Munich, Munich, Bavaria, Germany
Keywords: Cycling Priority, Fuzzy Logic, Traffic Signal Control.
Abstract: The integration of cycling into urban traffic systems has increased significantly. Which drives the expansion
of dedicated bicycle lanes at intersections to accommodate the growing cyclist volumes while ensuring
traffic efficiency and safety. Addressing cyclists’ priority at signalized intersections presents a complex
challenge, necessitating tailored traffic signals and control methods. This research proposes a cycling
priority strategy for isolated intersections, using fuzzy logic to make high-quality decisions regarding cyclist
priority while minimizing delays for all road users. The methodology involves developing a fuzzy logic-
based cyclist priority strategy, using input variables such as vehicle queue and cyclist queue to determine
cyclist priority. The evaluation, conducted using VISSIM microscopic traffic simulation, demonstrates that
the proposed fuzzy logic-based control system effectively reduces delays and stops for cyclists, with an
optimal preference threshold (P*) value of 0.7 balancing the needs of both cyclists and motor vehicles.
Sensitivity analysis against traditional control methods further emphasises the potential of the fuzzy logic
approach to enhance overall traffic efficiency and promote sustainable urban mobility.
a
https://orcid.org/0009-0004-5581-9192
b
https://orcid.org/0009-0005-6265-1815
c
https://orcid.org/0009-0000-1382-3231
1
INTRODUCTION
Sustainable transportation is critical in metropolitan
areas to address pollution and traffic congestion.
Cycling has gained popularity due to its health
benefits, low emissions, and efficient use of road
space. However, integrating bicycles into traffic
systems, especially at intersections prioritising motor
vehicles, remains challenging. In Germany, cyclist
demand is particularly high, exceeding 800 cyclists
per hour per direction in Munich and 1,000 in Berlin
during peak summer hours (München, 2023;
Senatsverwaltung für Umwelt, 2023). These volumes
emphasise the need for improved cyclist
accommodation in traffic management systems and
infrastructure.
Studies show that stops and delays significantly
impact cycling experiences. Börjesson and Eliasson
(2012) revealed that cyclists perceive a one-minute
stop as equivalent to 3.1 minutes of cycling, reflecting
the greater effort and hazards associated with
interruptions (Börjesson and Eliasson, 2012). Fioreze
et al. (2019) found that cyclists often overestimate
waiting times by up to five times the actual duration
(Fioreze, 2019). Strategies like reducing signal cycle
lengths or extending green phases for cyclists are
cost-effective solutions to improve conditions, while
extensive infrastructure changes, such as segregating
bike and car flows, require higher investments (Gillis
et al., 2020; Poliziani et al., 2022).
The first section of this paper will review the
body of research on bike prioritising and traffic
signal regulation. The fuzzy logic-based (FL-based)
control system’s design and approach, including the
choice of input variables, membership functions, and
rule base, will next be presented. Subsequently, the
article will provide an overview of the simulation
environment and showcase the findings of research
that compares the suggested system with
conventional traffic signal control techniques. The
study will conclude with a discussion of the
findings’ implications and recommendations for
further research directions.
This study proposes a FL-based cyclist priority
strategy to address these issues. FL, a robust
490
Salem, S., Leone, P. and Leonhardt, A.
Real-Time Cyclist Prioritization with Fuzzy Logic-Based Signal Control.
DOI: 10.5220/0013292500003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 490-497
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
artificial intelligence method for handling imprecise
data (Zadeh, 1975), is ideal for managing the
complexities of traffic flow. The system integrates
cyclist-specific factors like speed, acceleration, and
safety to improve travel experiences, reduce delays,
and promote sustainable transportation.
2
LITERATURE REVIEW
In recent years, the integration of bicycles into
traffic systems has gained attention, driven by the
growth of dedicated bicycle lanes at intersections
(Portilla et al., 2016; Wang et al., 2019). This
reflects efforts to accommodate increasing number
of cyclists while ensuring safe and efficient traffic
flow. Specialised traffic signals and control
strategies are essential for integrating bicycles
smoothly into intersections (Portilla et al., 2016).
For instance, Wang et al. (2019) proposed a group-
based signal timing model focusing on safety in
mixed traffic (Wang et al., 2019), while Portilla et
al. (2016) developed a predictive control system to
manage interactions between bicycles and vehicles
(Portilla et al., 2016).
FL has emerged as an effective tool for traffic
signal optimisation (Koukol et al., 2015; Pandey et
al., 2017). Introduced by Zadeh (1975), FL provides
a framework to manage uncertainties and imprecise
data in traffic systems (Zadeh, 1975). Studies have
used FL to prioritise specific road users, such as
emergency vehicles and public transit (Ikidid et al.,
2021; Chuo et al., 2022). Chuo et al. (2022)
demonstrated the use of FL for adaptive traffic
control, showing reduced delays and congestion by
dynamically adjusting signal timings based on queue
lengths (Chuo et al., 2022). Similarly, Nae and
Dumitrache (2019) applied FL to optimise signal
timings in urban intersections, significantly reducing
wait times and queues (Nae and Dumitrache, 2019).
Bhatia and Aggarwal (2020) highlighted the
environmental benefits of FL-based controllers and
suggested IoT integration for enhanced traffic
management (Bhatia and Aggarwal, 2020).
FL has also shown promise in transit and cyclist
prioritisation. Stevanovic and Teodorović (2022)
developed a Type-2 FL strategy to balance transit
and traffic delays, improving public transportation
operations while minimising disruptions to other
road users (Stevanovic and Teodorović, 2022). Vial
et al. (2023) explored cyclist prioritisation using
connected autonomous vehicles (CAVs) and noted
potential challenges, such as inconsistent
prioritisation and increased delays for cars (Vial et
al., 2023). Other approaches include using sensors
for cyclist priority during specific conditions, like
rain, or providing “green waves” via radar or mobile
apps (Fietsberaad, 2012; Verbeeke, 2020; Lai,
2021). However, cyclists’ low adoption of mobile
apps creates communication gaps, reducing their
effectiveness (Vial et al., 2023).
Integrating bicycles into urban traffic systems
through advanced strategies like FL is critical for
creating safer, more efficient traffic management.
These systems must balance the needs of all road
users, prioritising cyclists without significantly
disrupting motorised traffic (Gillis et al., 2020;
Poliziani et al., 2022).
3
METHODOLOGY
This research investigates a strategy to prioritise
cyclists at isolated intersections, adapting the
approach by Stevanovic and Teodorović (2022). The
primary objective is to develop a system using
approximate reasoning to make high-quality
decisions about cyclists’ priorities while minimising
delays for all road users.
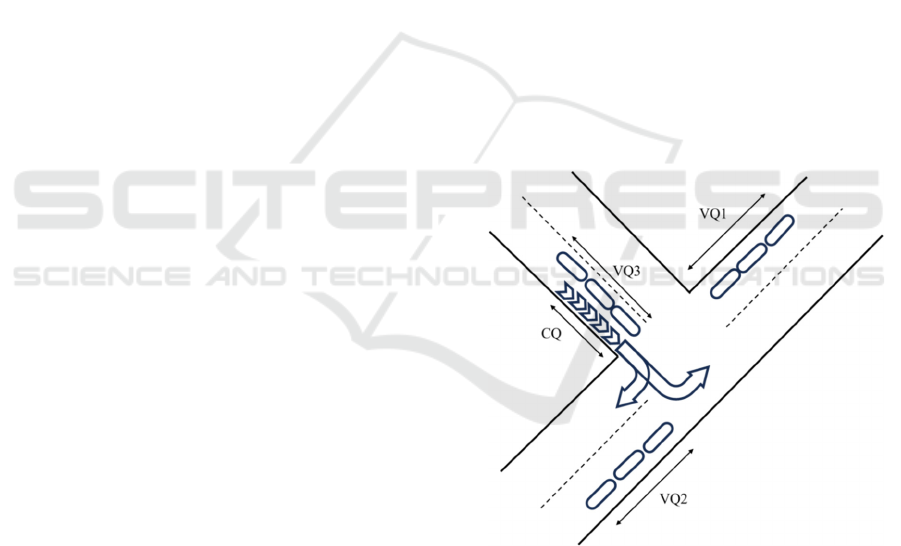
Figure 1: Intersection Layout.
3.1
Fuzzy Logic Control
The system’s core component is FL, introduced by
Zadeh (1973). Fuzzy rules use descriptive
expressions like small, medium, or large to
categorise linguistic input and output variables,
creating a fuzzy control algorithm that quantifies
these expressions using fuzzy sets. This study
employs the fuzzy Mamdani logic method, also
known as the Max-Min method.
Real-Time Cyclist Prioritization with Fuzzy Logic-Based Signal Control
491
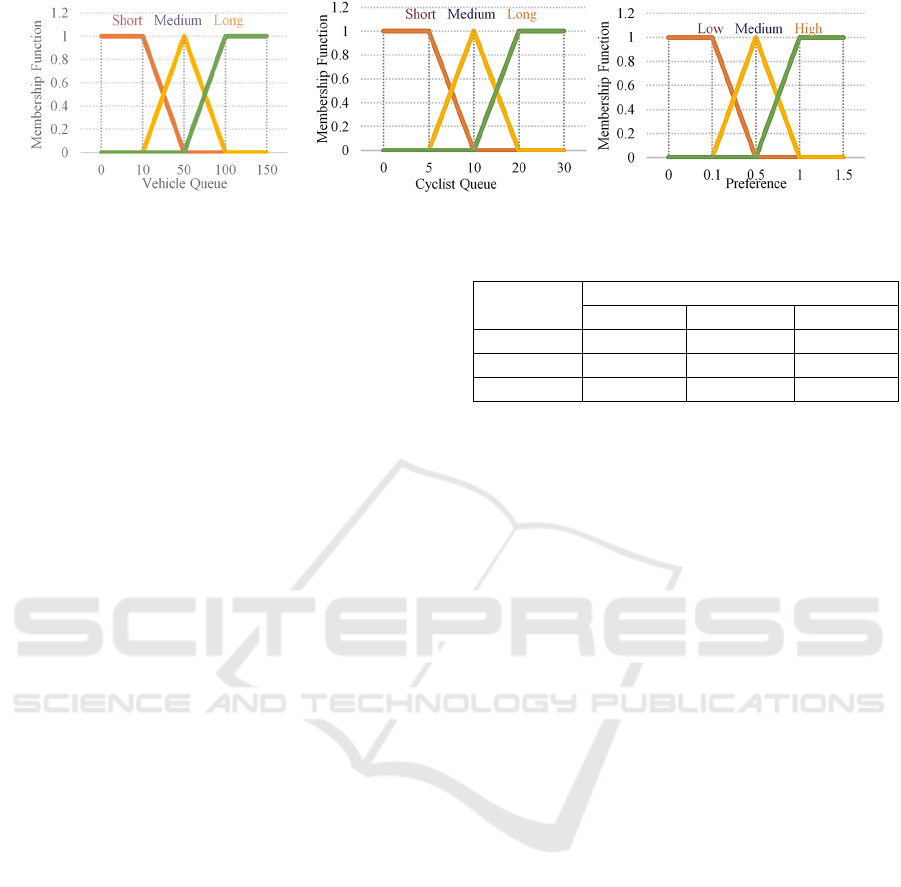
Figure 2: Membership Functions.
The cyclist priority strategy based on FL
includes two input variables—vehicle queue (VQ)
and cyclist queue (CQ)—and one output variable,
preference (P), which represents the percentage
preference to prioritise cyclists. VQ is the sum of
vehicle queue lengths in competing stages (VQ =
VQ1 + VQ2 + VQ3), as shown in Figure 1. At a
signalised intersection, vehicle/cyclist queue length
is defined as the distance from the stop line to the
rear of the last vehicle/cyclist waiting in any lane
during a red signal phase. Intelligent transportation
system technologies, such as smart roadside sensors
and advanced surveillance cameras, are being widely
adopted globally. These traffic cameras can function
independently or enhance the capabilities of other
smart roadside sensors, enabling the measurement
and detection of queue lengths in designated traffic
lanes with greater accuracy (Makino et al., 2018;
Umair et al., 2021).
The fuzzy sets for this system use triangle-
shaped membership functions, as shown in Figure 2,
to describe different categories. For vehicle queues
(VQ), there are three categories: Short, Medium, and
Long. These categories correspond to queue lengths
of 0 to 10 meters for Short, 10 to 50 meters for
Medium, and 50 to 100 meters for Long. Similarly,
for cyclist queues (CQ), the membership functions
define Short (0 to 5 meters), Medium (5 to 10
meters), and Long (10 to 20 meters). The output
variable, called “Preference,” is also divided into
three categories: Low, Medium, and High. This
variable determines how much priority cyclists
should get. The system uses an inference engine
with a set of rules to decide the level of preference
based on the input values for VQ and CQ. For
instance, if the vehicle queue is short but the cyclist
queue is long, the system gives high priority to
cyclists. On the other hand, if both queues are
medium, the system assigns a medium level of
priority to cyclists. The centroid method is used for
defuzzification, determining the crisp output value
by finding the “centre” of the area under the curve
formed by the membership functions.
Table 1: Fuzzy Rules.
Bike Q
Vehicle Q
Short Medium Long
Short Mediu
m
Low Low
Medium Hi
g
hMediu
m
Low
Long Hi
g
hHi
g
h Mediu
m
3.2
Cyclist Prioritization Strategy
Figure 3 shows a Pseudo code for the proposed
control strategy’s formulation through descriptive
rules. The decision on whether a cyclist approaching
the intersection should pass without stopping is
based on the detectors’ VQ and CQ values. A higher
CQ value increases the cyclist’s preference to pass
without stopping, while a higher VQ value decreases
this preference. The preference P (%) to prioritize
the cyclist can be low, medium, or high. If the FL-
calculated preference P exceeds a predetermined
threshold value P*, the cyclist should take priority.
The parameter P* value significantly impacts cyclist
and car delays. When cyclists are given priority,
actions are taken to allow them to pass through the
intersection without stopping. The cyclist signal
group extends its green light until the cyclist queue
clears or the maximum green time for that stage is
reached. If the cyclist signal group is showing a red
light, it transitions to a green light. This thorough
approach ensures a robust analysis and evaluation of
the proposed cyclist priority strategy, aiming to
improve the integration of cyclists into urban traffic
systems while maintaining overall traffic efficiency.
4
EXPERIMENTAL SETUP
We selected the three-legged intersection at the
entrance of the University of the Bundeswehr Test
track as the model area to assess the effectiveness
and robustness of our proposed methodology. For
simplicity we assumed that the cyclists are coming
from one direction. This setup allows us to
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
492
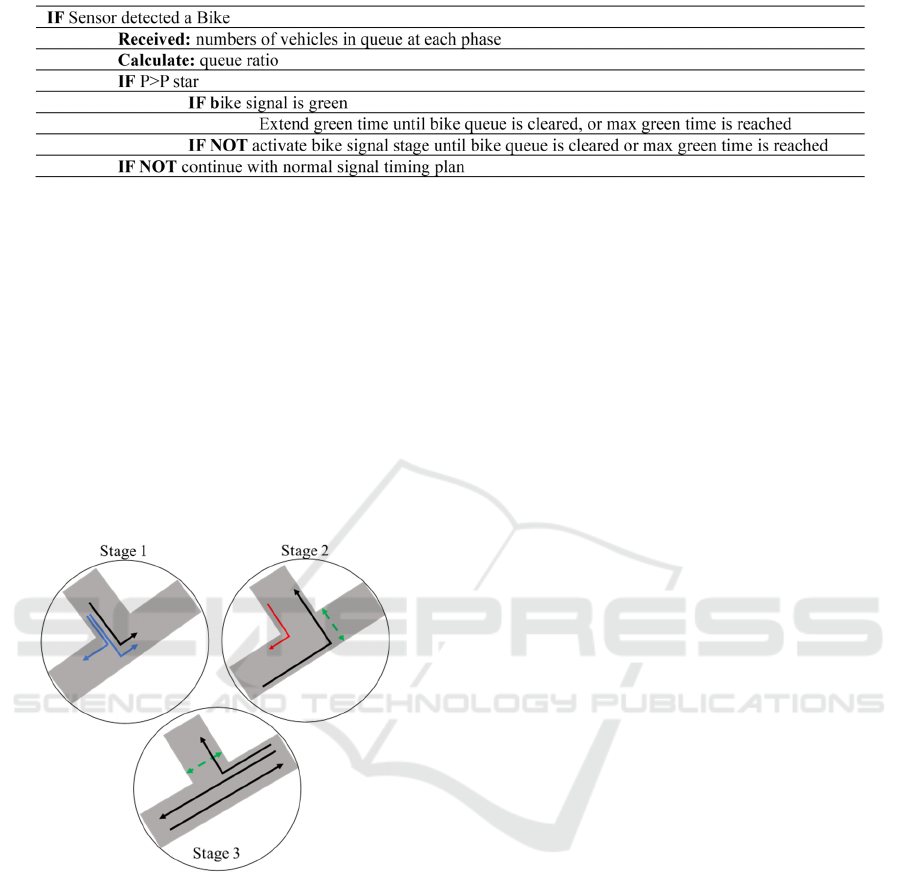
Figure 3: Pseudocode of FL-based Signal Control Strategy.
eventually test our algorithm on a real intersection.
We used the VISSIM microscopic traffic simulation
software by PTV AG, a tool commonly employed by
researchers in road traffic developments. VISSIM
features an intuitive graphical user interface (GUI)
for designing road network geometries and running
simulations. Additionally, the VISSIM-COM
interface creates a hierarchical
model enabling programmers to control simulator
functions and parameters initially set by the GUI.
Programmers can use any language that supports
COM objects, such as C++, Visual Basic, Java, or
Python.
Figure 4: Traffic Stages.
Signal data is managed by the VISSIG module,
with VAP defining control logic and VisVAP
offering a graphical interface. Static signal data is
stored in PUA files, while control logic is in VAP
files. By modifying VAP files, researchers can
evaluate and optimize signal control strategies,
adjusting parameterized stage lengths to improve
traffic flow and efficiency. This methodology allows
for a thorough evaluation of cyclist priority
strategies within urban traffic systems while
maintaining overall traffic efficiency. The control
logic encompasses three stages (Figure 4), with lane
widths between 2.75 and 3.50 meters and a vehicle
composition of 5% heavy goods vehicles (HGV) and
95% passenger cars, traveling at an average speed of
50 km/hr. Maximum green times are set at 30, 30,
and 40 seconds for stages 1, 2, and 3 respectively,
with minimum green times of 7, 4, and 10 seconds.
We utilize VISSIM to extract data on vehicle and
cyclist queues, as well as performance measures for
all road users.
The developed code implements a traffic signal
control algorithm that uses FL to prioritize traffic
flow based on real-time vehicle and cyclist queue
lengths. This program is designed to run every
second, ensuring timely traffic signal adjustments at
the intersection. It begins by defining several
constants necessary for its operation, including the
minimum and maximum green times for the three
traffic signal stages. These constants are parameters
for the FL subroutine and the main traffic control
logic, ensuring the program operates within set
limits. Figure 5 shows part of the signal control logic
implemented in the Vis-VAP module, with the FL
calculations executed using a Python script.
5
RESULTS AND ANALYSIS
This section evaluates the performance of the
proposed FL-based cyclist prioritization system
across various traffic scenarios. The results focus on
understanding the impact of the preference threshold
on key traffic metrics, such as delays and stops for
both cyclists and vehicles. The analysis also
compares the FL-based system’s performance
against traditional traffic control strategies to
highlight its relative advantages.
5.1
Validation Analysis
This section presents the results of our evaluation of
the proposed FL for a traffic signal control program
with varying preference threshold P* values. The
objective of this evaluation is to understand how
different P* settings impact the average delays and
stops experienced by vehicles and bicycles. By
analysing these results, we aim to identify optimal
Real-Time Cyclist Prioritization with Fuzzy Logic-Based Signal Control
493
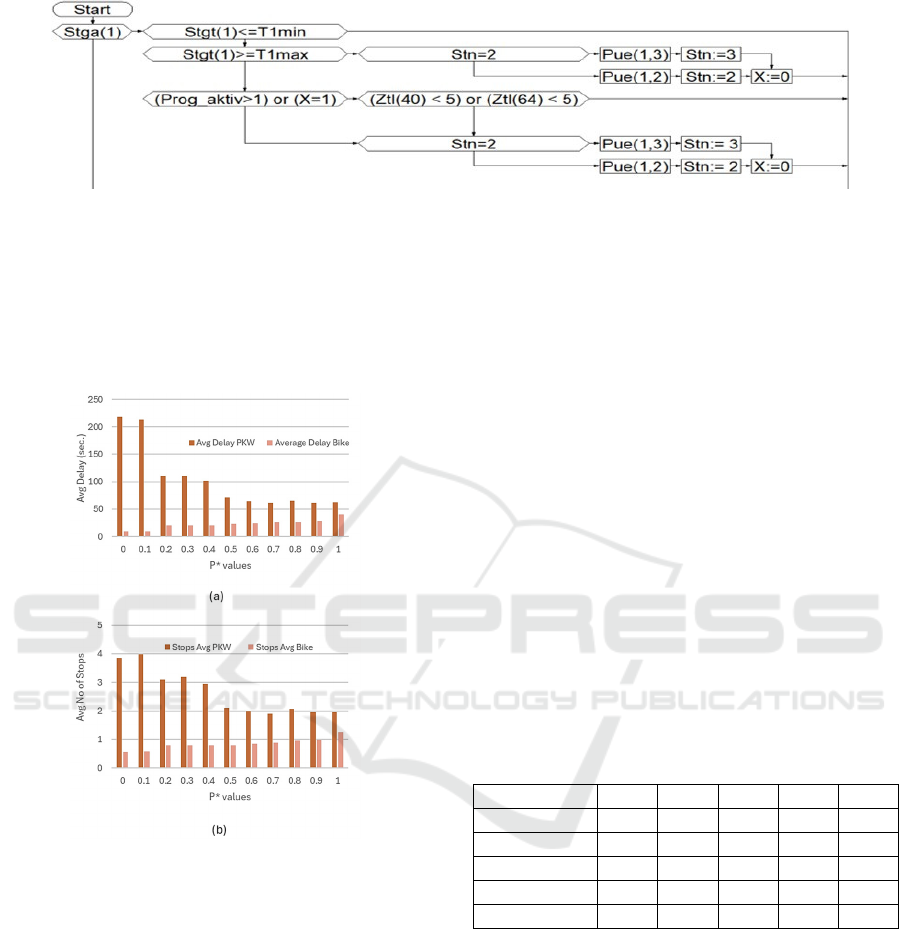
Figure 5: Example of the Logic implemented in VisVap.
configurations that balance the needs of different
road users and improve overall traffic efficiency.
Figures 6(a) and 6(b) illustrate the average delays
and average number of stops experienced by
personal cars (PKW) and bicycles under various P*
values, respectively.
Figure 6: Impact of Different P* Values on (a) Average
Delay and (b)Average Number of stops for Personal cars,
and Cyclists.
In Figure 6(a), the average delay for personal cars
shows a sharp decline as the P* value increases, with
the highest delay observed at P* = 0. This delay
decreases significantly up to P* = 0.3, after which the
reduction becomes more gradual, indicating a
balancing trend. For bicycles, the delay exhibits the
opposite behaviour: it is lowest at P* = 0 and steadily
increases with higher P* values, peaking at P* = 1.
This trend highlights how prioritising bicycles (lower
P* values) effectively minimises their delays while
increasing delays for personal cars.
Figure 6(b) shows the average number of stops
for personal cars and bicycles. Similar to the delay
trends, the number of stops for personal cars
decreases as P* values increase. The highest number
of stops is observed at P* = 0, while fewer stops
occur as P* approaches 1. Conversely, cyclists
experience the fewest stops at P* = 0, with the
number of stops gradually increasing as P* values
rise, reaching a maximum at P* = 1. These patterns
emphasize the trade-off in optimizing delays and
stops for either personal cars or bicycles, depending
on the prioritization set by the P* value.
Based on the results, a preference threshold of
P*= 0.7 was selected as the optimal setting. This
value balances minimizing delays and stops for both
personal cars and cyclists. While lower P* values
(closer to 0) strongly prioritize bicycles, they result
in significantly higher delays and stops for personal
cars. Conversely, higher P* values (closer to 1)
disproportionately favor personal cars at the expense
of bicycle delays. The intermediate value of P* = 0.7
offers a compromise, reducing the gap between the
two road user groups and achieving a more equitable
and efficient traffic management solution.
Table 2: Traffic Scenarios Data.
Base 1 2 3 4
North-East 500 1000 500 500 500
West-East 600 600 600 600 1200
North-West 300 300 600 300 300
East 400 400 400 800 400
Cyclists 500 500 500 500 500
To validate the effectiveness of our proposed
logic and optimize its parameters, we compared the
average delay and stops produced by the fuzzy logic
(FL) controller (with P* = 0.7) to a fixed control
plan and a strategy from the German traffic light
guidelines (RiLSA). RiLSA is a technical standard
in Germany that includes specifications and
recommendations for planning and operating traffic
signals. The specific strategy used for comparison is
RiLSA Freigabezeitanpassung (FZA), which adjusts
the green time for each signal group based on
inbound gap time data. This strategy extends the
green time for a signal group with detected demand
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
494
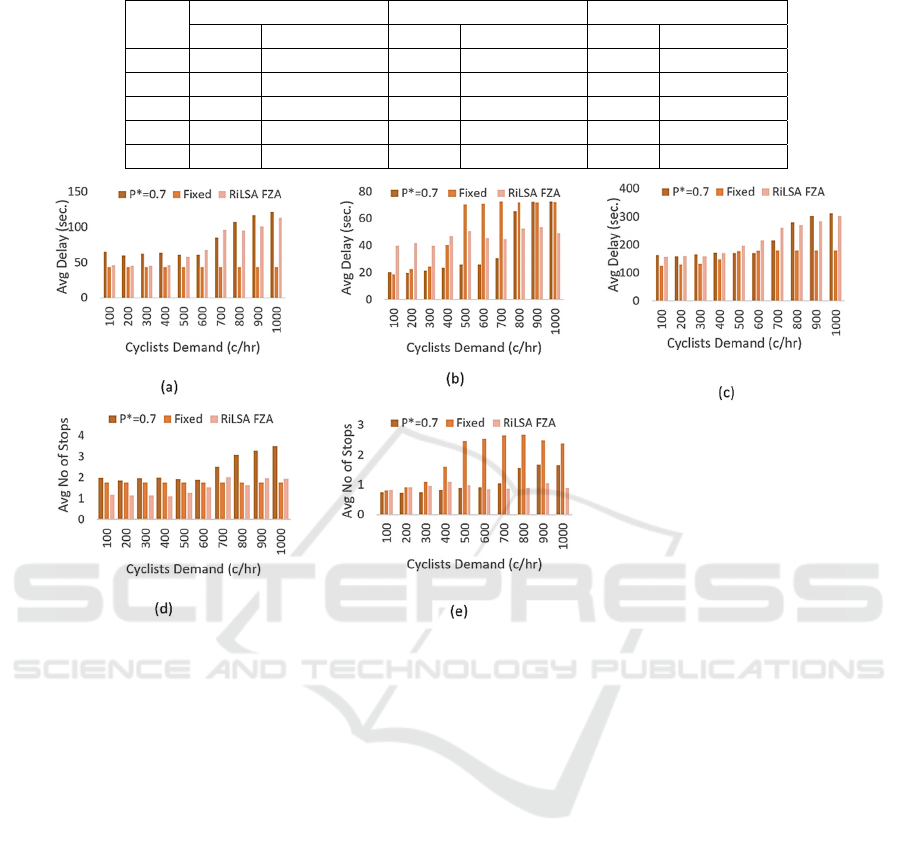
Table 3: Comparison of Average Delay and Person Delay.
Avg Delay Vehicles Avg Delay Cyclists Person Delay
Fixed RiLSA FZA Fixed RiLSA FZA Fixed RiLSA FZA
Base 0.40 0.05 -0.63 -0.49 -0.13 -0.15
1 0.78 -0.21 -0.60 -0.34 0.07 -0.24
2 0.89 0.10 -0.63 -0.58 0.14 -0.13
3 1.46 0.07 -0.62 -0.46 0.43 -0.05
4 0.62 0.55 -0.66 -0.53 0.04 0.15
Figure 7: The Effect of Cyclist Demand on Various Traffic Performance Metrics. (a) Avg Delay for Vehicles, (b) Avg
Delay for Cyclists, (c) Avg person Delay including Pedesterians, (d) Avg no of Stops for Vehicles, (e) Avg no of Stops for
Cyclists.
(in this case, cyclists) within pre-defined minimum
and maximum limits, without altering the stage
sequence. To comprehensively evaluate
performance, we employed metrics such as average
vehicle delay, total cyclist delay, and overall person
delay, assuming an average vehicle occupancy rate
of 1.5 passengers per vehicle. Table 2 outlines the
different demand scenarios used in this evaluation.
In this analysis, negative values indicate that the
FL controller produces less delay compared to the
baseline strategies, while positive values indicate an
increase in delay. Our results demonstrate that the
proposed logic significantly outperforms both the
RiLSA and fixed-time controllers in reducing the
average delay for cyclists across all demand
scenarios. However, this improvement for cyclists
comes at the cost of a slight increase in the average
delay for personal cars. These results suggest that
the FL controller effectively prioritizes cyclists,
reducing their delays even under varying traffic
volumes. As shown in Table 3, the proposed logic
not only significantly reduces delays for cyclists but
also improves overall person delay. While delays for
personal cars increase slightly, the pronounced
benefits for cyclists result in a more favorable
overall performance. This highlights the ability of
the proposed traffic signal control program to
balance the trade-offs between different road users,
optimizing delays for cyclists without neglecting the
needs of vehicles and pedestrians.
5.2
Sensitivity Analysis Under
Different Cyclists Demand
The analysis conducted here aims to evaluate the
effect of cyclist demand on various traffic
performance metrics while maintaining vehicle
demand fixed. The comparison is made across three
strategies: FL with P* = 0.7, Fixed signal control, and
RiLSA FZA.
Figure 7 illustrates the performance of the FL
system across various traffic metrics under different
cyclist demand levels and in comparison with
Real-Time Cyclist Prioritization with Fuzzy Logic-Based Signal Control
495

traditional traffic control systems. For average delay
of vehicles (Figure 7a), the FL system shows a mode-
rate increase in delays as cyclist demand rises but
consistently maintains lower delays compared to the
fixed signal control. However, RiLSA FZA performs
better at higher cyclist demands, likely due to its lon-
ger green times allocated to clear queues efficiently.
In terms of average delay for cyclists (Figure 7b),
the FL system results in slightly higher delays
compared to RiLSA FZA, especially under higher
cyclist demand scenarios. This can be attributed to the
shorter green times allocated under FL, which aim to
balance traffic flow for both vehicles and cyclists. The
average person delay (Figure 7c), which includes
pedestrians, reflects a key trade-off between the three
strategies. While RiLSA FZA generally achieves the
lowest person delays, the FL system strikes a balance,
avoiding excessively high delays for vehicles. The
fixed signal control, in contrast, shows the highest
overall person delay, highlighting its limitations in
handling mixed traffic efficiently.
The average number of stops for vehicles (Figure
7d) shows that the FL system performs better than the
fixed signal control but is slightly less efficient than
RiLSA FZA at reducing stops as cyclist demand
increases, which indicates that FL provides smoother
vehicle flow. Finally, for the average number of stops
for cyclists (Figure 7e), the FL system shows
moderate performance, with fewer stops than the
fixed signal control but slightly more than RiLSA
FZA at higher cyclist demands. This is consistent with
the FL system’s balanced approach, which prioritizes
equitable green time distribution across all road users.
In summary, the fuzzy logic system demonstrates
a well-balanced approach to managing traffic at
intersections, effectively distributing green time
between vehicles, cyclists, and pedestrians. While it
may not outperform RiLSA FZA in cyclist-centric
scenarios, it provides a more equitable solution,
maintaining lower vehicle delays and fewer stops for
all road users compared to the fixed signal control.
As shown in Figure 8, the FL system activated
the bicycle signal less often than the RiLSA FZA
strategy, and the green time per actuation was
noticeably shorter. As cyclist demand increased, the
green time allocated per cyclist under FL stayed
fairly limited, ensuring that many cyclists could
cross during the green phase without excessively
prolonging the signal. This highlights how FL
prioritizes the efficient use of green time, enabling
cyclists to clear the intersection quickly, though this
comes at the cost of longer delays for larger cyclist
queues. In contrast, RiLSA FZA, which triggered
the bicycle signal more frequently, provided
significantly longer green times as demand grew.
This allowed it to clear larger queues in one cycle,
but it also sometimes resulted in unused green time
once all cyclists had passed. As a result, the green
time per cyclist under RiLSA FZA was higher
compared to FL. The shorter green times under FL
reflect its focus on balancing the needs of vehicles
and cyclists. By avoiding overly long green phases
for cyclists, FL minimizes excessive delays for
vehicles while maintaining fairness for all road
users. Although this approach might result in
slightly higher cyclist delays during periods of heavy
demand, it supports a more balanced distribution of
green time across the entire traffic system.
Figure 8: Effect of Cyclists Demand on Average Green
Time.
6
CONCLUSIONS
This study explored and tested a new way to prioritize
cyclists at traffic signals using fuzzy logic, a method
designed to handle the complexities of real-world
traffic. The system adjusts the signal timings dynami-
cally, taking into account the number of cyclists and
vehicles waiting at an intersection. The results indica-
te that this approach significantly reduces delays and
stops for cyclists, providing them with a smoother and
more efficient experience, while ensuring that vehicle
delays remain at acceptable levels. By maintaining
this balance, the system promotes a more equitable
traffic flow for all road users.
A key finding of the study was that a preference
threshold (P*) value of 0.7 worked best, ensuring
that cyclists and vehicles shared green time
equitably. While this approach slightly increased
delays for vehicles, it delivered noticeable
improvements for cyclists and reduced overall
delays for all road users. Compared to traditional
traffic control methods, this system stands out as a
practical solution to prioritize cyclists without
causing major disruptions to vehicle traffic.
The study also highlights the potential of fuzzy
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
496

logic to manage the unpredictable and ever-changing
nature of traffic. Its ability to adapt in real-time
makes it a significant improvement over fixed or
rigid systems. Beyond just benefiting cyclists, this
strategy supports larger sustainability goals,
encouraging more people to cycle by making it a
more attractive alternative to driving. This, in turn,
could help reduce emissions and contribute to
healthier urban environments.
Looking ahead, there’s room to refine this
system further. Future work could expand its design
to better include pedestrians and adapt to
intersections of different layouts. While this study
found that a P* value of 0.7 worked well, future
research could explore ways to make this value
adjustable in real time, optimizing performance
based on changing traffic conditions. The next step
will involve testing the system in a real-world
setting at the entrance of the University of the
Bundeswehr Test Track. These real-life trials will
help determine how effective and practical the
system is outside of simulation, paving the way for
broader adoption in urban traffic systems.
ACKNOWLEDGEMENTS
This research is part of the project MORE – Munich
Mobility Research Campus (MORE, 2023). The
project is funded by dtec.bw – Digitalization and
Technology Research Center of the Bundeswehr.
dtec.bw is funded by the European Union –
NextGenerationEU.
REFERENCES
Bhatia, M. S. and Aggarwal, A. (2020). Congestion
control by reducing wait time at the traffic junction
using fuzzy logic controller. International Journal of
Sensors, Wireless Communications and Control,
10(6):989–1000.
Börjesson, M. and Eliasson, J. (2012). The value of time
and external benefits in bicycle appraisal.
Transportation Research Part A: Policy and Practice,
46(4):673– 683.
Chuo, H. S. E., Seah, Y. E., Tan, M. K., Lim, K. G., Liau,
C. F., and Teo, K. T. K. (2022). On-demand priority traffic
optimizer with fuzzy logic microcontroller. In 2022
IEEE International Conference on Artificial Intelli-
gence in Engineering and Technology (IICAIET).
Fietsberaad (2012). Groningen gives cyclist the green light
more often. CROW.
Fioreze, T. (2019). Perceived waiting time versus actual
waiting time: a case study among cyclists in Enschede,
The Netherlands.
Gillis, D., Gautama, S., Van Gheluwe, C., Semanjski, I.,
Lopez, A. J., and Lauwers, D. (2020). Measuring
delays for bicycles at signalized intersections using
smartphone GPS tracking data. ISPRS International
Journal of Geo-Information, 9(3):174.
Ikidid, A., Fazziki, A. E., and Sadgal, M. (2021). A fuzzy
logic supported multi-agent system for urban traffic
and priority link control. Journal of Universal
Computer Science, 27(10):1026–1045.
Koukol, M., ZajíIková, L., Marek, L., and Tuček, P.
(2015). Fuzzy logic in traffic engineering: A review on
signal control. Mathematical Problems in
Engineering, 2015:1–14.
Lai, M. (2021). Intersection control for cyclists with
isignum.
Makino, H., Tamada, K., Sakai, K., and Kamijo, S.
(2018). Solutions for urban traffic issues by its
technologies. IATSS Research, 42(2):49–60.
München, L. (2023). Daten zum radverkehr.
Nae, A. C. and Dumitrache, I. (2019). Fuzzy-logic
adaptive control of traffic in an urban junction. U.P.B.
Sci. Bull., 81(2).
Pandey, S., Mathur, P., and Patil, T. (2017). Real time
traffic signal control using fuzzy logic controller:
Review. In Proceedings of the International
Conference on Innovations in Information, Embedded
and Communication Systems (ICIIECS).
Poliziani, C., Rupi, F., Schweizer, J., Saracco, M., and
Capuano, D. (2022). Cyclist’s waiting time estimation
at intersections, a case study with GPS traces from
bologna. In Transportation Research Procedia,
volume 62, pages 325–332.
Portilla, C., Valencia, F., Espinosa, J., Núñez, A., and De
Schutter, B. (2016). Model-based predictive control
for bicycling in urban intersections. Transportation
Research Part C: Emerging Technologies, 70:27– 41.
Senatsverwaltung für Umwelt, Mobilität, V.-u. K. (2023).
Fahrradverkehr in zahlen.
Stevanovic, A. and Teodorović, D. (2022). Type-2 fuzzy
logic based transit priority strategy. Expert Systems
With Applications, 187:115875.
Umair, M., Farooq, M. U., Raza, R. H., Chen, Q., and
Abdulhai, B. (2021). Efficient video-based vehicle
queue length estimation using computer vision and
deep learning for an urban traffic scenario. Processes,
9(10):1786.
Verbeeke, R. (2020). Green wave-apps for cyclists.
Vial, A., Salomons, M., Daamen, W., Van Arem, B.,
Hoogendoorn-Lanser, S., and Hoogendoorn, S. (2023).
Prioritizing cyclists at signalized intersections using
observations from connected autonomous vehicles.
Transportation Research Record: Journal of the
Transportation Research Board, 2677(12):29–43.
Wang, F., Tang, K., Li, K., Liu, Z., and Zhu, L. (2019). A
group-based signal timing optimization model
considering safety for signalized intersections with
mixed traffic flows. Journal of Advanced
Transportation, pages 1–13.
Zadeh, L. A. (1975). The concept of a linguistic variable
and its application to approximate reasoning—i.
Information Sciences, 8(3):199–249.
Real-Time Cyclist Prioritization with Fuzzy Logic-Based Signal Control
497
