
Upside-Down Reinforcement Learning for More Interpretable Optimal
Control
Juan Cardenas-Cartagena
1,2
, Massimiliano Falzari
1,3
, Marco Zullich
1
and Matthia Sabatelli
1
1
Bernoulli Institute, University of Groningen, Groningen, The Netherlands
2
Wisenet Center, University of Agder, Grimstad, Norway
3
Data & Analytics R&I, ENGINEERING, Rome, Italy
Keywords:
Upside-Down Reinforcement Learning, Neural Networks, Random Forests, Interpretability, Explainable AI.
Abstract:
Model-Free Reinforcement Learning (RL) algorithms either learn how to map states to expected rewards or
search for policies that can maximize a certain performance function. Model-Based algorithms instead, aim
to learn an approximation of the underlying model of the RL environment and then use it in combination with
planning algorithms. Upside-Down Reinforcement Learning (UDRL) is a novel learning paradigm that aims
to learn how to predict actions from states and desired commands. This task is formulated as a Supervised
Learning problem and has successfully been tackled by Neural Networks (NNs). In this paper, we investigate
whether function approximation algorithms other than NNs can also be used within a UDRL framework.
Our experiments, performed over several popular optimal control benchmarks, show that tree-based methods
like Random Forests and Extremely Randomized Trees can perform just as well as NNs with the significant
benefit of resulting in policies that are inherently more interpretable than NNs, therefore paving the way for
more transparent, safe, and robust RL.
1 INTRODUCTION
The dramatic growth in adoption of Neural Net-
works (NNs) within the last 15 years has sparked
the necessity for increased transparency, especially in
high-stake applications (HLEG, 2019; Agarwal and
Mishra, 2021): NNs are indeed considered to be black
boxes whose rules for outputting predictions are non-
interpretable to humans. The quest for transparency
considers two different routes: interpretability and ex-
plainability (Broniatowski et al., 2021). Interpretabil-
ity is defined as an inherent property of a model, and
it is well known that NNs lie very low on the inter-
pretability spectrum, whereas other methods, like de-
cision trees and linear models, are generally consid-
ered highly interpretable (James et al., 2013). Ex-
plainability, on the other hand, pertains to a series of
techniques that can be applied in a post-hoc fashion,
typically after a model has been trained, in order to
gain human-understandable insights on its inner dy-
namics. The downside of these techniques is that they
often approximate complex model dynamics; and is-
sues such as unfaithfulness (Nauta et al., 2023; Mir
´
o-
Nicolau et al., 2025) arise. So, while NNs can of-
ten offer accurate solutions and state of the art per-
formance, interpretability has to be achieved through
inherently transparent models. When it comes to
high-stake applications Rudin (2019) argues that in-
terpretability is generically a more important prop-
erty than explainability. Among such high-stake ap-
plications, we can find the management of decision
making systems that are applied to a large variety of
domains, ranging from healthcare to energy manage-
ment and even financial risk assessment. Interest-
ingly, the recent marriage between Deep and Rein-
forcement Learning (DRL), has led to the develop-
ment of several systems that have successfully been
applied to these high-stake decision making prob-
lems. Examples of such applications go from the
aforementioned medical domain (Yu et al., 2021) to
particle physics (Degrave et al., 2022), infrastruc-
ture management planning (Leroy et al., 2024) and,
of course, autonomous driving (Sallab et al., 2017).
Unfortunately, despite working really well in prac-
tice, DRL algorithms carry over some of the limita-
tions that characterize NNs, therefore resulting in au-
tonomous agents whose optimal decision making ca-
pabilities are not interpretable nor fully explainable.
While Glanois et al. (2024) survey the efforts made
by researchers to use interpretable models, such as
rules-based methods or formulas, to explain transi-
tions or policies, it is worth mentioning that within the
extremely rapidly growing research landscape of Re-
inforcement Learning (RL), scientific works that are
Cardenas-Cartagena, J., Falzari, M., Zullich, M. and Sabatelli, M.
Upside-Down Reinforcement Learning for More Interpretable Optimal Control.
DOI: 10.5220/0013299400003890
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 859-869
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
859
focused on this area are at the present moment rather
limited.
Contributions. In this paper, we aim to make one
step forward toward the development of more trans-
parent optimal decision making agents. To achieve
this, we rely on a newly introduced learning paradigm
that aims to solve typical RL problems from a
pure Supervised Learning perspective called Upside
Down Reinforcement Learning (UDRL) (Schmidhu-
ber, 2019). While originally designed for being cou-
pled with NNs, we show that an UDRL approach can
also be successfully integrated with inherently more
interpretable machine learning models, like forests of
randomized trees. Despite not being as interpretable
as simple decision trees (James et al., 2013), this fam-
ily of techniques still offers an intrinsic tool for global
feature importance, such as mean decrease in impu-
rity, thus offering an edge over NNs in terms of inter-
pretability (Ibrahim et al., 2019) and design of trans-
parent autonomous agents.
2 UPSIDE-DOWN
REINFORCEMENT LEARNING
2.1 The UDRL Framework
The concept of Upside-Down Reinforcement Learn-
ing (UDRL) was first introduced by Schmidhuber
(2019), and its idea is remarkably straightforward:
tackling Reinforcement Learning problems via Su-
pervised Learning (SL) techniques. To understand
how this can be achieved, let us introduce the typical
Markovian mathematical framework on which pop-
ular RL algorithms are based. We define a Markov
Decision Process (MDP) (Puterman, 2014) as a tuple
M = ⟨S , A, P , R ⟩ where S corresponds to the state
space of the environment, A is the action space mod-
eling all the possible actions available to the agent,
P : S × A × S → [0, 1] is the transition function and
R : S × A × S → R is the reward function. When
interacting with the environment, at each time-step t,
the RL agent performs action a
t
in state s
t
, and tran-
sitions to state s
t+1
alongside observing reward signal
r
t
. The goal is then to learn a policy π : S → ∆(A)
which maximizes the expected discounted sum of re-
wards E
π
[
∑
∞
k=0
γ
k
r
t+k
], with γ ∈ [0, 1). It is well
known that when it comes to RL, differently from the
Dynamic Programming setting, the transition func-
tion P and the reward function R are unknown to the
agent. To overcome this lack of information, the agent
can either learn to predict expected rewards, assuming
the model-free RL set-up, or learn to predict s
t+1
and
r
t
, assuming a model-based RL setting.
In UDRL the agent doesn’t do either, and its main
goal is learning to predict actions instead. Given a
typical RL transition τ = ⟨s
t
, a
t
, r
t
, s
t+1
⟩, an UDRL
agent uses the information contained within τ to learn
to map a certain state s
t
, and reward r
t
to action
a
t
. Formally, this corresponds to learning a function
f (s
t
, r
t
) = a
t
, a task that can be seen as a classic SL
problem where the goal is that of building a function
f : X → Y , where X and Y are the input and output
spaces defining the SL problem one wants to solve.
While intuitive and easy to understand, the function
defined above does not account for long-horizon re-
wards, which are crucial for most optimal control
problems. Therefore, it needs to be slightly modified.
This can be achieved by introducing two additional
variables that come with the name of commands: d
r
and d
t
. They correspond to the desired reward d
r
the
agent wants to achieve within a certain time horizon
d
t
when being in state s
t
. Based on this, we can define
the ultimate goal of a UDRL agent as that of learn-
ing f (s
t
, d
r
, d
t
) = a
t
. This function f comes with the
name of behavior function and, ideally, if learned on
a large number of transitions τ, it can be queried in
such a way that it can return the action that achieves
a certain reward in a certain state in a certain number
of time-steps. To better understand the role of this
behavior function, let us consider the simple MDP
represented in Figure 1, where states are denoted as
nodes and edges are represented by the actions a the
agent can take, alongside the rewards r
t
the agent ob-
serves.
s
0
s
1
s
2
s
3
a
1
r
t
= 2
a
2
r
t
= 1
a
3
r
t
= −1
Figure 1: A simple MDP whose behavior function f is sum-
marized in Table 1.
A fully trained behavior function that correctly
models the dynamics of this MDP is summarized in
Table 1.
Related Work. The first successful application of
the UDRL paradigm can be found in the work of Sri-
vastava et al. (2019), who showed that a UDRL agent
controlled by a neural network could outperform pop-
IAI 2025 - Special Session on Interpretable Artificial Intelligence Through Glass-Box Models
860

Table 1: A tabular representation of the behavior function f
that correctly models the dynamics represented in the MDP
visualized in Figure 1. For example, let us consider that
the agent is in state s
0
and that its goal is that of obtaining
a desired reward of d
r
= 2 in one time-step d
t
, then when
queried this function should return a
1
. Note how the infor-
mation contained within s
0
, concatenated to d
r
and d
f
, con-
stitutes a training sample that can be used in an SL setting
for predicting a
1
.
State d
r
d
t
Action a
s
0
2 1 a
1
s
0
1 1 a
2
s
0
1 2 a
1
s
1
-1 1 a
3
ular model-free RL algorithms such as DQN and PPO
on both discrete and continuous action space environ-
ments. The same paper also highlights the potential of
UDRL when it comes to sparse-reward environments.
UDRL has been subsequently applied by Ashley et al.
(2022) and Arulkumaran et al. (2022) with the latter
work showcasing how this learning paradigm can be
successfully extended to a setting of offline RL, im-
itation learning, and even meta-RL. While the term
UDRL has only been introduced very recently, it is
worth mentioning that some of its core ideas can
be associated with the fields of goal-conditioned or
return-conditioned RL (Liu et al., 2022; Furuta et al.,
2021). In this learning set-up agents need to learn ac-
tions constrained to particular goals, which may come
in the form of specific rewards in given states, usu-
ally from hindsight information. Besides these works,
UDRL has, to the best of our knowledge, seldom
been applied in other studies if not for comparing it
with other similar techniques, such as the Decision
Transformer (Chen et al., 2021). This highlights how
UDRL is still an underexplored technique that is still
far from expressing its potential.
3 METHODS
In all of the applications above of UDRL, f comes
in the form of a neural network, a choice motivated
by the recent successes that this family of machine
learning techniques has demonstrated when it comes
to RL problems modeled by high-dimensional state
and action spaces. However, the UDRL formalism in-
troduced by Schmidhuber (2019) allows for using any
machine learning algorithm suitable for solving SL
tasks. Yet, to the best of our knowledge, no such study
exists. In what follows, we start by exploring whether
five different SL algorithms can be effectively cou-
pled with the UDRL framework and therefore provide
a valuable alternative to NNs. A brief description of
these algorithms, alongside an explanation about why
they were chosen, is presented hereafter.
3.1 Algorithms
Tree-Based Algorithms. The first two studied al-
gorithms can be categorized under the tree-based
Reinforcement Learning umbrella and are Random
Forests (RFs) (Breiman, 2001) and Extremely Ran-
domized Trees (ETs) (Geurts et al., 2006). Differ-
ent from neural networks, both methods are nonpara-
metric and build a model in the form of the average
prediction of an ensemble of regression trees. Be-
fore the advent of neural networks, they both provided
a valuable choice of function approximation within
the realm of approximate Reinforcement Learning
(Busoniu et al., 2017) and have successfully been
used for solving several optimal control problems.
For example, RFs were successfully coupled with
the popular Q-Learning algorithm by Min and Elliott
(2022), which showed on-par performance to that of
Deep-Q Networks on two of the three studied bench-
marks. They were also successfully used in a multi-
objective setting by Song and Wang (2024), who
optimized multiple objectives in a multistage medi-
cal multi-treatment setting. Regarding ETs, the ar-
guably most successful application is that presented
by Ernst et al. (2005), where ETs were used to con-
struct the popular Fitted Q Iteration algorithm for the
batch RL setting. ETs have since then been suc-
cessfully used for solving several RL tasks, ranging
from the design of clinical trials (Ernst et al., 2006b;
Zhao et al., 2009) to the management of intensive care
units (Prasad et al., 2017) and even autonomous driv-
ing (Mirchevska et al., 2017). Among the benefits
of this family of techniques Wehenkel et al. (2006)
highlight their universal approximation consistency,
alongside their interpretability, two properties which,
in the UDRL context, could allow learning an inter-
pretable and transparent behavior function f .
Boosting Algorithms. The third and fourth stud-
ied behavior functions are ensemble methods that fall
within the boosting family of algorithms. Differ-
ently from the aforementioned tree-based algorithms,
which construct the trees independently and in par-
allel, boosting techniques build the trees sequentially,
with the main goal of having each new tree learn from
the errors of the previous one. While several boost-
ing algorithms exist, in this paper we consider the
two arguably most popular ones: AdaBoost (Freund
et al., 1996) and XGBoost (Friedman, 2001). Both of
these algorithms have successfully been used in RL
Upside-Down Reinforcement Learning for More Interpretable Optimal Control
861

(Brukhim et al., 2022), although their RL applications
are scarcer compared to RFs and ETs. Yet, we be-
lieve that within the UDRL setting, they both could
be used for effectively learning the behavior function
f . As was described in Table 1, a typical UDRL be-
havior function is trained on data that comes in tabular
form, a data type on which boosting algorithms typi-
cally perform very well and can even outperform NNs
(Shwartz-Ziv and Armon, 2022).
K-Nearest Neighbour. The final considered algo-
rithm is K-Nearest Neighbour (KNN) (Cover and
Hart, 1967), a popular clustering method rooted in
instance-based learning. While its applications when
it comes to RL are rather limited, made some excep-
tions for its integration within some model-free algo-
rithms (Mart
´
ın H et al., 2009; Shah and Xie, 2018),
this algorithm was chosen as it provides a straightfor-
ward non-parametric baseline that can be effectively
used for assessing the performance of the previously
introduced tree-based and boosting methods.
3.2 Environments
We evaluate the performance of the abovementioned
algorithms on three popular optimal control bench-
marks of increasing difficulty. The benchmarks are
CartPole (Barto et al., 1983), Acrobot (Sutton,
1995) and Lunar Lander and are all provided by the
OpenAI-Gym package. Each environment is summa-
rized in Table 2, where we describe its key compo-
nents, by specifically focusing on the state space S
representation, as this information will play an im-
portant role in Section 5 of the paper.
3.3 Experimental Setup
We train each behavior function on the aforemen-
tioned optimal control tasks five times with five differ-
ent random seeds by following the algorithmic guide-
lines described by Srivastava et al. (2019), the full
pseudo-code of our UDRL implementation can be
found in the Appendix 6. Each algorithm is allocated
a budget of 500 training episodes, as this is a num-
ber of episodes that are known to be sufficient for re-
sulting in successful learning for most popular DRL
algorithms. When it comes to the NN, the behavior
function comes in the form of a multi-layer percep-
tron with three hidden layers, activated by ReLU ac-
tivation functions. The size of each hidden layer is 64
nodes and the popular Adam algorithm with a learn-
ing rate of 0.001 is used for optimization. The net-
work is implemented in the PyTorch deep-learning
framework (Paszke et al., 2017). All other behavior
functions are implemented with the Scikit-Learn
package (Pedregosa et al., 2011) and we adopt the de-
fault hyperparameters that are provided by the library.
Exploration of all agents is governed via the popular
ε-greedy strategy with the value of ε set constant to
0.2 throughout training. Lastly, as is common prac-
tice, all behavior functions are trained on UDRL tran-
sitions that are stored in an Experience-Replay mem-
ory buffer which has a capacity of 700.
4 RESULTS
We now provide an analysis of the performance of the
six different tested behavior functions f . Our analy-
sis is twofold: first, we focus on the performance ob-
tained at training time, while later we focus on the
performance obtained at inference time.
Training. Our training curves are reported in Fig-
ure 2 where for each algorithm we show the average
reward obtained per training episode over five differ-
ent training runs. We can start by observing that on
the CartPole task the best-performing behavior func-
tions appear to be RFs, ETs, and XGBoost, as they all
obtain training rewards of ≈ 150. The performance of
these ensemble methods is therefore better than that
obtained by the NN, which, despite showing some
faster initial training, obtains a final reward of ≈ 100.
The KNN and AdaBoost behavior functions on the
other hand show less promising results as their perfor-
mance only marginally improves over training. When
it comes to the Acrobot task we can observe that this
time the best performing algorithm is the NN, as it
converges to a training reward of ≈ −150. Among
the tree-based methods, the RF behavior function is
the one performing best, obtaining training rewards
of ≈ −200. A similar performance is also obtained
by the XGBoost algorithm. ETs and AdaBoost even-
tually perform very similarly although the ET al algo-
rithm converges significantly faster. Similar to what
was observed on the CartPole task, the worst per-
forming algorithm is again the KNN behavior func-
tion. On the Lunar Lander environment we can ob-
serve that all tested behavior functions are able to im-
prove their decision making across episodes. There-
fore, suggesting that there is no algorithm that signif-
icantly outperforms all of the others.
Inference. While the results presented above are
promising and possibly suggest that in the UDRL
context the behavior function f does not have to nec-
essarily come in the form of a neural network, it is
essential to investigate how general and robust this
IAI 2025 - Special Session on Interpretable Artificial Intelligence Through Glass-Box Models
862
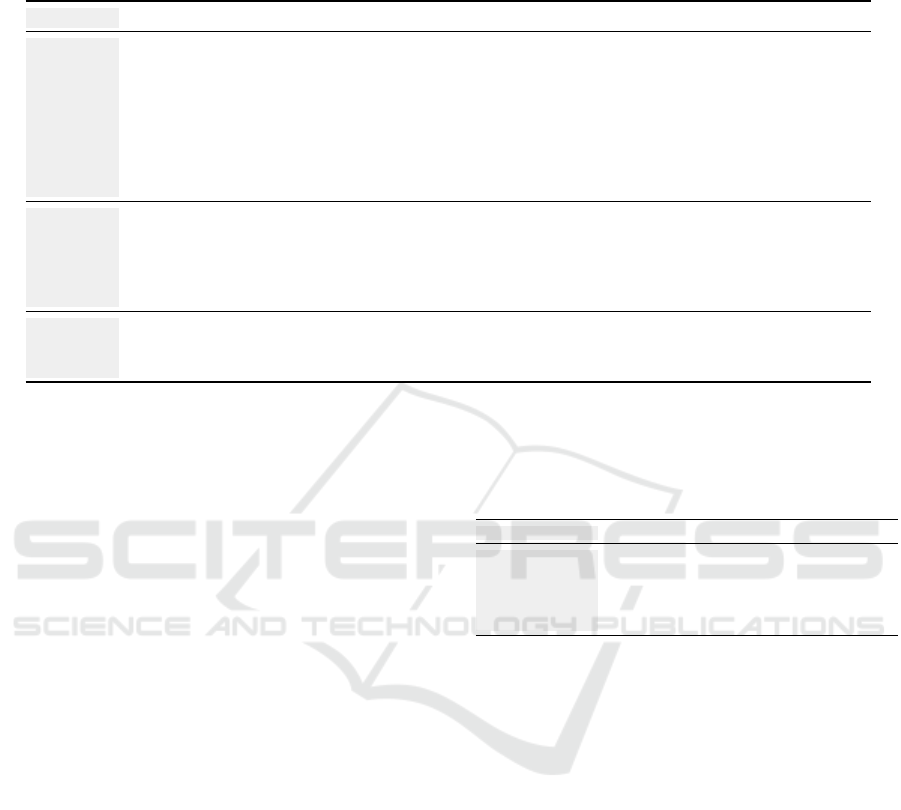
Table 2: An overall description of the CartPole, Acrobot, and Lunar Lander environments used in our experiments. For
each environment, we report information regarding its state S and A action spaces, together with the rewards that the agent
receives while interacting.
Component CartPole Acrobot Lunar Lander
States S Continuous 4D vector:
- x: Cart Position
- ˙x: Cart Velocity
- θ: Pole Angle
-
˙
θ: Pole Angular Velocity
Continuous 6D vector:
- sinθ
1
: Sine of the first link
- cosθ
1
: Cosine of the first link
- sinθ
2
: Sine of the second link
- cosθ
2
: Cosine of the second link
-
˙
θ
1
: Angular velocity of first link
-
˙
θ
2
: Angular velocity of second link
Continuous 8D vector:
- x: X position
- y: Y position
- ˙x: X linear velocity
- ˙y: Y linear velocity
- θ: Angle
-
˙
θ: Angular velocity
- Left and right leg contact points
Actions A Discrete:
0: Push left
1: Push right
Discrete:
0: Torque left
1: No torque
2: Torque right
Discrete:
0: Do nothing
1: Fire left engine
2: Fire main engine
3: Fire right engine
Rewards r
t
+1 for every step taken -1 for every step until the goal is reached +100 for successful landing
-100 for crash landing
Reward for firing engines and leg contact
behavior function is. Note that, as was described
in Section 3.3, the results presented in Figure 2 are
computed at training time, which means that the re-
ported performance is representative of the ε-greedy
exploration strategy that the algorithms follow whilst
training. As a result, the performance presented in
the above-mentioned training curves is only partially
representative of the final performance of the differ-
ent algorithms. To quantitatively assess how well
the trained behavior functions have actually mastered
the three different optimal control environments, one
needs to query these functions. Recall, that based
on the formalism explained in Section 2, the ultimate
goal of UDRL is that of learning a behavior function
f , that once queried with a state coming from the en-
vironment s
t
can return action a
t
achieving desired
reward d
r
in time horizon d
t
. Therefore, to test the in-
ference capabilities of the different behavior functions
it is crucial to define d
r
and d
t
. For the CartPole task
this is straightforward as it is well known that given
the episodic nature of the problem, the maximum cu-
mulative reward an agent can obtain is that of 200. It
follows that all behavior functions are queried with d
r
and d
t
set to 200. When it comes to the Acrobot and
Lunar Lander environments, which differently from
CartPole are non-episodic tasks, setting d
r
and d
t
re-
quires some extra care. As one wants to avoid queer-
ing the behavior function with desired commands c
that are unrealistic and not supported by the environ-
ment, we decided to set d
r
and d
t
to the most com-
mon used values that were used throughout the last
100 episodes, as we believe they are fairly represen-
tative of the final performance of the algorithms. For
each behavior function and environment, we report
the exact form of f (s
t
, d
r
, d
t
) in Table 3.
Table 3: The form of the behavior function f that is used at
inference time by each algorithm on the three tested envi-
ronments.
Behaviour Function CartPole Acrobot Lunar Lander
Neural Network f (·,200, 200) f (·, −63, 64) f(·, 49, 101)
Random Forest f (·, 200,200) f (·, −79, 82) f (·, 57, 102)
Extra-Trees f (·, 200,200) f (·, −75, 77) f (·, 34, 118)
AdaBoost f (·, 200,200) f (·, −77, 81) f (·, 45, 118)
XGBoost f (·, 200,200) f(·, −114, 120) f (·, 136,389)
KNN f (·, 200,200) f(·, −129, 132) f (·, 62,112)
The results obtained at inference time are pre-
sented in Table 4 where we report the average cumu-
lative reward that is obtained by the behavior func-
tion presented in Table 3 which is queried 100 times.
The results of the best performing behavior function
are presented in a green cell, whereas the ones of the
second best performing one are reported in a yellow
cell. On the CartPole task we can observe that the
overall best performing behavior function is the one
coming in the form of a NN, followed by the one
modeled by the XGBoost algorithm, as both behavior
functions fully solve the presented task by obtaining
a final cumulative reward of ≈ 200. The performance
of the tree-based algorithms is slightly lower, and a
bit more unstable as shown by the larger standard de-
viations, however, it can still be stated that both al-
gorithms have learned how to balance the cart suc-
cessfully. Good performance was also obtained by
the AdaBoost algorithm, albeit not on par with that
of the aforementioned tree-based algorithms. Finally,
the KNN behavior function remains the worst per-
forming algorithm as was already highlighted when
discussing the first plot presented in Figure 2, where
Upside-Down Reinforcement Learning for More Interpretable Optimal Control
863
0
250 500
0
100
200
Episode
Reward
CartPole
0
250 500
−500
−250
−50
Episode
Acrobot
0
250 500
−250
−150
−50
Episode
Lunar Lander
NN RF ET
AdaBoost XGBoost
KNN
Figure 2: Comparison of the performance of the six different tested behavior functions (NN, RF, ET, KNN, AdaBoost, and
XGBoost) on the three OpenAI Gym environments: CartPole, Acrobot, and Lunar Lander. The results are shown in terms
of rewards per episode and are averaged over five different training runs.
the algorithm barely improved its decision making
over time. When it comes to the Acrobot task, we
can again see that the best performing behavior func-
tion is that modeled by a NN which obtains final test-
ing rewards of ≈ −75. RFs, ETs, and XGBoost all
perform similarly, although their final performance
is slightly worse compared to that of NNs given fi-
nal testing rewards of ≈ −100. Again, we can note
that the results obtained by the AdaBoost algorithm
are not on-par with those obtained by the tree-based
methods and that the KNN algorithm is overall the
worse performing algorithm. On the arguably most
complicated Lunar Lander environment, we can see
that the best performing behavior function is the one
modeled via RFs, which obtains a final performance
of ≈ −54. Similarly to what was observed on the
CartPole task the second best performing algorithm
is XGBoost, and perhaps surprisingly the third best
performing algorithm is AdaBoost. Arguably even
more surprising is the fact that on this task the KNN
behavior function managed to actually improve its
performance over time, and that the behavior function
modeled by the NN is the overall worst performing al-
gorithm.
5 INTERPRETABILITY GAINS
While RFs and ETs did not significantly outperform
their NN counterparts in terms of final performance,
it is worth noting that this family of techniques has
much more to offer regarding interpretability than
NNs as it allows us to get global explanations for the
behavior function, which in the case of NNs is not
straightforward. In this section, we aim to shed some
light on what makes the aforementioned tree-based
behavior functions able to solve the optimal control
tasks described in Section 3.2 almost optimally. To
this end, we rely on the work of Louppe et al. (2013):
for different states of the tested environments, we
compute feature importance scores that are estimated
as mean impurity decrease. We compute these scores
at inference time, based on the experimental protocol
that was discussed in the second paragraph of Section
4. We present a qualitative analysis that shows how
for different states of the environments, sampled at
different stages of the RL episode, the feature impor-
tance scores change and can highlight which features
of the state space S are the most relevant for the be-
havior function.
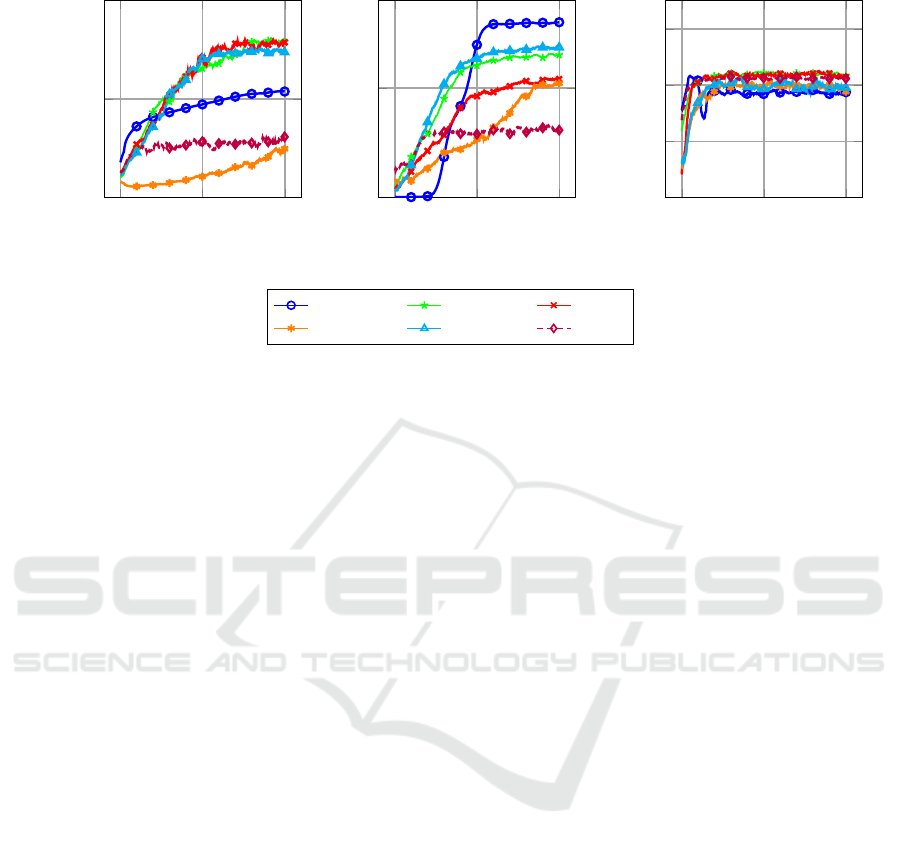
We start by discussing the scores obtained on the
CartPole task by an RF behavior function. These re-
sults are summarized in Figure 3. Overall we can ob-
serve that out of the four different features modeling
the state space, the highest importance score through-
out an episode is always associated with the pole an-
gular velocity θ feature, as demonstrated by all three
histogram plots of Figure 3. This feature appears to
play an even more significant role when the pole on
top of the cart is in an out-of-balance position (see
first plot of Figure 3). We can also observe that at
the very beginning of the episode (last plot of Fig-
ure 3), high-importance scores are associated with the
feature denoting the position of the cart x, although
the more the agent interacts with the environment, the
less important this feature becomes.
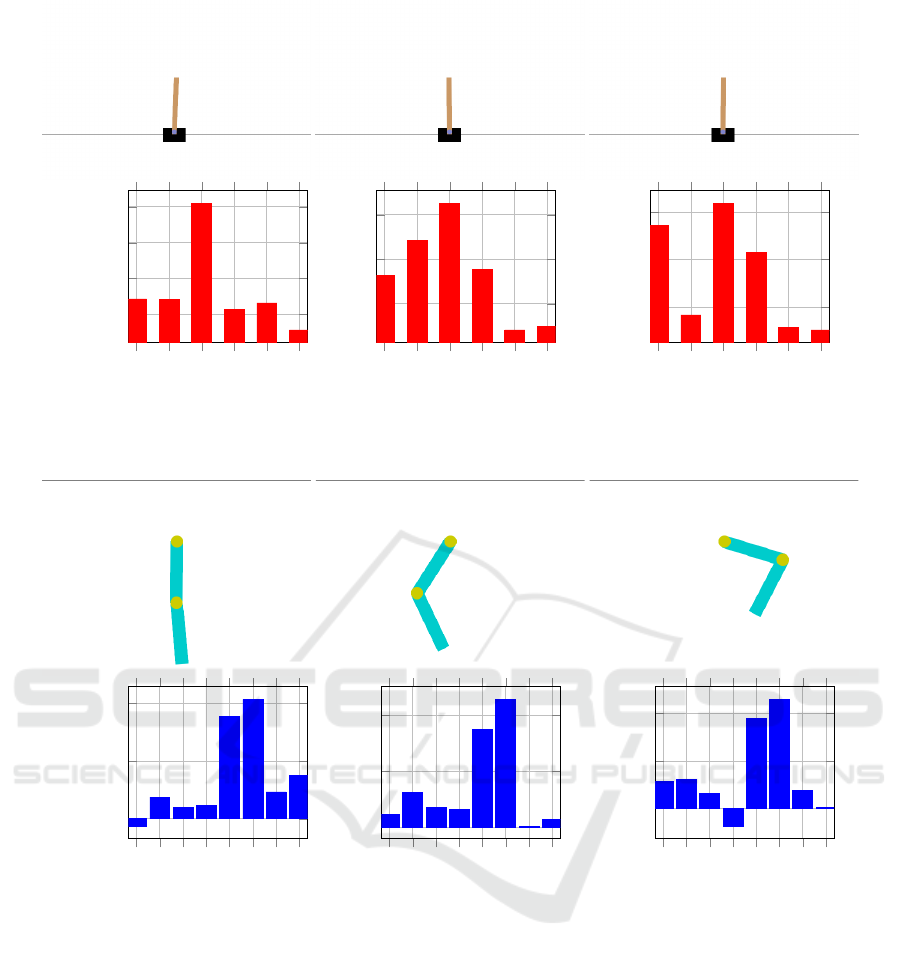
On the Acrobot environment, where we report
IAI 2025 - Special Session on Interpretable Artificial Intelligence Through Glass-Box Models
864

Table 4: The results of the six tested behavior functions obtained at inference time, namely when the behavior function f
gets queried with the desired reward d
t
and desired time horizon d
t
commands described in Table 3. The best performing
algorithm is reported in a green cell, whereas the second best performing algorithm is reported in a yellow cell.
Behavior Function CartPole Acrobot Lunar Lander
Neural Network 199.93 ± 0.255 −75.00 ± 15.36 −157.04 ± 71.26
Random Forest 188.25 ± 13.82 −100.05 ± 62.80 −54.74 ± 96.22
Extra-Trees 181.56 ± 31.63 −100.00 ± 93.72 −127.79 ± 49.19
AdaBoost 168.61 ± 31.02 −109.00 ± 63.70 −108.26 ± 80.71
XGBoost 199.27 ± 4.06 −100.00 ± 34.71 −76.96 ± 89.69
KNN 85.11 ± 50.30 −160.50 ± 36.66 −128.47 ± 47.49
feature importance scores for the ET behavior func-
tion, we can observe from the results presented in Fig-
ure 4 that the most important features are by far the
ones representing the two angularComparison with
State of the Art velocities of the two links (
˙
θ
1
and
˙
θ
2
). These two features are consistently associated to
the two highest importance scores, no matter at which
stage of the episode the agent is.
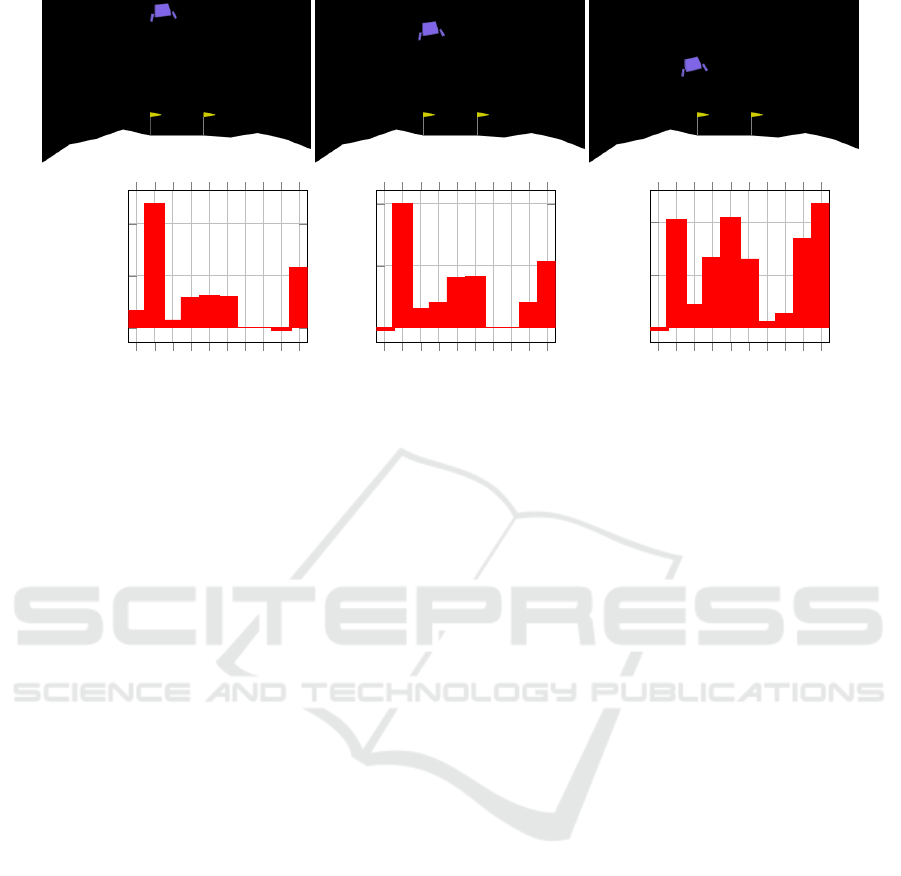
Finally, when it comes to the Lunar Lander envi-
ronment we have observed that by far the most impor-
tant feature of the environment is the one representing
the y position of the spaceship that is being controlled
by the agent. This can be seen in all three histograms
presented in Figure 5. Intuitively this is also a result
that seems to make sense, as the goal of the agent is
that of controlling the spaceship which is approach-
ing the moon’s surface from above. Interestingly, we
can also note that the features modeling the left and
right contact points of the spaceship, l
c
and l
r
, have
very low importance scores no matter how close the
spaceship is to the surface. Furthermore, it can also
be observed that when the spaceship is still far from
approaching the moon’s ground the importance scores
of the features denoting the linear velocity ( ˙y), as well
as the angle θ and angular velocity
˙
θ of the spaceship
are fairly low. However, as highlighted by the third
plot of Figure 5 this changes once the spaceship is
about to land.
As the results presented in Figures 3, 4 and 5 are
only a snapshot of the full agent-environment inter-
action, we refer the reader to the webpage of this
project
1
where we release all trained behavior func-
tions whose inference performance can be tested in
the browser alongside the computation of the feature
importance scores for all states encountered by the
agent.
1
https://vimmoos-udrl.hf.space/
6 DISCUSSION & CONCLUSION
In this paper, we have explored the potential that Up-
side Down Reinforcement Learning has to offer when
it comes to the design of interpretable and transparent
autonomous agents. We have shown that the behav-
ior function f , which plays a crucial role in this novel
learning paradigm, does not have to strictly come in
the form of a neural network as originally described
by Schmidhuber (2019) and that tree-based ensem-
ble methods, together with boosting algorithms, can
perform just as well. We have also provided ini-
tial promising insights suggesting that behavior func-
tions coming in the form of Random Forests and Ex-
tremely Randomized Trees can have much more to
offer in terms of interpretability than their neural net-
work counterparts. Based on these results we fore-
see several promising avenues for future work. The
main, rather obvious, limitation of this paper is that it
considers overall simple optimal-control benchmarks,
which are far in terms of complexity from the RL en-
vironments that the DRL community adopts as test
beds. How well UDRL agents trained with RFs and
ETs would perform on high-dimensional and spa-
tially organized state spaces such as those modeled
by the popular Atari Arcade Learning Environment
is unknown. While it is well known that convolu-
tional neural networks have become the go-to design
choice when it comes to these types of problems, it is
worth mentioning that other valid alternatives could
be explored. For example, in the contexts of forests
of randomized trees, one could consider the work of
Mar
´
ee et al. (2005) and extend it from the value-based
RL setting, where it has shown promising results on
rather complex environments (Ernst et al., 2006a),
to the UDRL one. Next to scaling and generalizing
the results presented in this study to more complex
tasks, we believe another promising direction for fu-
ture work revolves around coupling the tree-based be-
havior functions with other explanation tools. Tech-
niques such as the recently introduced DPG (Arrighi
Upside-Down Reinforcement Learning for More Interpretable Optimal Control
865
x
˙x
θ
˙
θ
d
r
d
t
5
10
15
20
Importance
x
˙x
θ
˙
θ
d
r
d
t
5
10
15
x
˙x
θ
˙
θ
d
r
d
t
5
10
15
Figure 3: Feature importance scores coming from a trained RF behavior function computed for three different states of the
CartPole environment. In the first state, the agent decided to push the cart to the left, whereas in the second and third states,
the cart was pushed to the right.
sinθ
1
cosθ
1
sinθ
2
cosθ
2
˙
θ
1
˙
θ
2
d
r
d
t
0
10
20
Importance
sinθ
1
cosθ
1
sinθ
2
cosθ
2
˙
θ
1
˙
θ
2
d
r
d
t
0
10
20
sinθ
1
cosθ
1
sinθ
2
cosθ
2
˙
θ
1
˙
θ
2
d
r
d
t
0
10
20
Figure 4: Feature importance scores coming from a trained ET behavior function computed for three different states of the
Acrobot environment. In the first state, the agent decided to not apply any torque, while in the second and third states left
and right torques were applied respectively.
et al., 2024) which helps with the identification of
salient nodes in forests of randomized trees, or the
more popular Shapley values (Winter, 2002) along-
side their extensions (Muschalik et al., 2024) come
to mind. Lastly, it is worth highlighting the over-
all good performance obtained by the XGBoost al-
gorithm. While we have focused our interpretability
analysis on RFs and ETs, it is well-known that this al-
gorithm also has a lot to offer regarding feature impor-
tance scores. In the future, we aim to provide a thor-
ough comparison between different, inherently inter-
pretable behavior functions, to further identify which
state space components of an RL environment are the
most important ones to a UDRL agent.
REFERENCES
Agarwal, S. and Mishra, S. (2021). Responsible AI.
Springer.
Arrighi, L., Pennella, L., Marques Tavares, G., and Bar-
bon Junior, S. (2024). Decision predicate graphs:
Enhancing interpretability in tree ensembles. In
World Conference on Explainable Artificial Intelli-
gence, pages 311–332. Springer.
Arulkumaran, K., Ashley, D. R., Schmidhuber, J., and Sri-
vastava, R. K. (2022). All you need is supervised
learning: From imitation learning to meta-rl with up-
side down rl. arXiv preprint arXiv:2202.11960.
Ashley, D. R., Arulkumaran, K., Schmidhuber, J., and Sri-
vastava, R. K. (2022). Learning relative return poli-
IAI 2025 - Special Session on Interpretable Artificial Intelligence Through Glass-Box Models
866
x
y
˙x
˙y
θ
˙
θ
lc
rc
d
r
d
t
0
10
20
Importance
x
y
˙x
˙y
θ
˙
θ
lc
rc
d
r
d
t
0
10
20
x
y
˙x
˙y
θ
˙
θ
lc
rc
d
r
d
t
0
5
10
Figure 5: Feature importance scores coming from a trained RF behavior function computed for three different states of the
Lunar Lander environment. In the first and second states, the agent decided to fire the main engine, while in the third state
it decided to fire the right engine.
cies with upside-down reinforcement learning. arXiv
preprint arXiv:2202.12742.
Barto, A. G., Sutton, R. S., and Anderson, C. W. (1983).
Neuronlike adaptive elements that can solve difficult
learning control problems. IEEE transactions on sys-
tems, man, and cybernetics, (5):834–846.
Breiman, L. (2001). Random forests. Machine learning,
45:5–32.
Broniatowski, D. A. et al. (2021). Psychological founda-
tions of explainability and interpretability in artificial
intelligence. NIST, Tech. Rep.
Brukhim, N., Hazan, E., and Singh, K. (2022). A boost-
ing approach to reinforcement learning. Advances
in Neural Information Processing Systems, 35:33806–
33817.
Busoniu, L., Babuska, R., De Schutter, B., and Ernst, D.
(2017). Reinforcement learning and dynamic pro-
gramming using function approximators. CRC press.
Chen, L., Lu, K., Rajeswaran, A., Lee, K., Grover, A.,
Laskin, M., Abbeel, P., Srinivas, A., and Mordatch, I.
(2021). Decision transformer: Reinforcement learn-
ing via sequence modeling. Advances in neural infor-
mation processing systems, 34:15084–15097.
Cover, T. and Hart, P. (1967). Nearest neighbor pattern clas-
sification. IEEE transactions on information theory,
13(1):21–27.
Degrave, J., Felici, F., Buchli, J., Neunert, M., Tracey, B.,
Carpanese, F., Ewalds, T., Hafner, R., Abdolmaleki,
A., de Las Casas, D., et al. (2022). Magnetic con-
trol of tokamak plasmas through deep reinforcement
learning. Nature, 602(7897):414–419.
Ernst, D., Geurts, P., and Wehenkel, L. (2005). Tree-based
batch mode reinforcement learning. Journal of Ma-
chine Learning Research, 6.
Ernst, D., Mar
´
ee, R., and Wehenkel, L. (2006a). Reinforce-
ment learning with raw image pixels as input state. In
Advances in Machine Vision, Image Processing, and
Pattern Analysis: International Workshop on Intelli-
gent Computing in Pattern Analysis/Synthesis, IWIC-
PAS 2006 Xi’an, China, August 26-27, 2006 Proceed-
ings, pages 446–454. Springer.
Ernst, D., Stan, G.-B., Goncalves, J., and Wehenkel, L.
(2006b). Clinical data based optimal sti strategies for
hiv: a reinforcement learning approach. In Proceed-
ings of the 45th IEEE Conference on Decision and
Control, pages 667–672. IEEE.
Freund, Y., Schapire, R. E., et al. (1996). Experiments with
a new boosting algorithm. In icml, volume 96, pages
148–156. Citeseer.
Friedman, J. H. (2001). Greedy function approximation: a
gradient boosting machine. Annals of statistics, pages
1189–1232.
Furuta, H., Matsuo, Y., and Gu, S. S. (2021). Generalized
decision transformer for offline hindsight information
matching. arXiv preprint arXiv:2111.10364.
Geurts, P., Ernst, D., and Wehenkel, L. (2006). Extremely
randomized trees. Machine learning, 63:3–42.
Glanois, C., Weng, P., Zimmer, M., Li, D., Yang, T., Hao,
J., and Liu, W. (2024). A survey on interpretable rein-
forcement learning. Machine Learning, pages 1–44.
HLEG, H.-L. E. G. o. A. (2019). Ethics guidelines for trust-
worthy ai.
Ibrahim, M., Louie, M., Modarres, C., and Paisley, J.
(2019). Global explanations of neural networks: Map-
ping the landscape of predictions. In Proceedings of
the 2019 AAAI/ACM Conference on AI, Ethics, and
Society, pages 279–287.
James, G., Witten, D., Hastie, T., Tibshirani, R., et al.
(2013). An introduction to statistical learning, vol-
ume 112. Springer.
Leroy, P., Morato, P. G., Pisane, J., Kolios, A., and Ernst, D.
(2024). Imp-marl: a suite of environments for large-
scale infrastructure management planning via marl.
Upside-Down Reinforcement Learning for More Interpretable Optimal Control
867

Advances in Neural Information Processing Systems,
36.
Liu, M., Zhu, M., and Zhang, W. (2022). Goal-
conditioned reinforcement learning: Problems and so-
lutions. arXiv preprint arXiv:2201.08299.
Louppe, G., Wehenkel, L., Sutera, A., and Geurts, P. (2013).
Understanding variable importances in forests of ran-
domized trees. Advances in neural information pro-
cessing systems, 26.
Mar
´
ee, R., Geurts, P., and Wehenkel, J. P. L. (2005). Ran-
dom subwindows for robust image classification. In
2005 IEEE Computer Society Conference on Com-
puter Vision and Pattern Recognition (CVPR’05), vol-
ume 1, pages 34–40. IEEE.
Mart
´
ın H, J. A., de Lope, J., and Maravall, D. (2009). The
k nn-td reinforcement learning algorithm. In Methods
and Models in Artificial and Natural Computation. A
Homage to Professor Mira’s Scientific Legacy: Third
International Work-Conference on the Interplay Be-
tween Natural and Artificial Computation, IWINAC
2009, Santiago de Compostela, Spain, June 22-26,
2009, Proceedings, Part I 3, pages 305–314. Springer.
Min, J. and Elliott, L. T. (2022). Q-learning with online
random forests. arXiv preprint arXiv:2204.03771.
Mirchevska, B., Blum, M., Louis, L., Boedecker, J., and
Werling, M. (2017). Reinforcement learning for au-
tonomous maneuvering in highway scenarios. In
Workshop for Driving Assistance Systems and Au-
tonomous Driving, pages 32–41.
Mir
´
o-Nicolau, M., i Cap
´
o, A. J., and Moy
`
a-Alcover, G.
(2025). A comprehensive study on fidelity metrics
for xai. Information Processing & Management,
62(1):103900.
Muschalik, M., Baniecki, H., Fumagalli, F., Kolpaczki, P.,
Hammer, B., and H
¨
ullermeier, E. (2024). shapiq:
Shapley interactions for machine learning. In The
Thirty-eight Conference on Neural Information Pro-
cessing Systems Datasets and Benchmarks Track.
Nauta, M., Trienes, J., Pathak, S., Nguyen, E., Peters,
M., Schmitt, Y., Schl
¨
otterer, J., Van Keulen, M., and
Seifert, C. (2023). From anecdotal evidence to quan-
titative evaluation methods: A systematic review on
evaluating explainable ai. ACM Computing Surveys,
55(13s):1–42.
Paszke, A., Gross, S., Chintala, S., Chanan, G., Yang, E.,
DeVito, Z., Lin, Z., Desmaison, A., Antiga, L., and
Lerer, A. (2017). Automatic differentiation in pytorch.
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V.,
Thirion, B., Grisel, O., Blondel, M., Prettenhofer, P.,
Weiss, R., Dubourg, V., et al. (2011). Scikit-learn:
Machine learning in python. the Journal of machine
Learning research, 12:2825–2830.
Prasad, N., Cheng, L.-F., Chivers, C., Draugelis, M., and
Engelhardt, B. E. (2017). A reinforcement learning
approach to weaning of mechanical ventilation in in-
tensive care units. arXiv preprint arXiv:1704.06300.
Puterman, M. L. (2014). Markov decision processes: dis-
crete stochastic dynamic programming. John Wiley &
Sons.
Rudin, C. (2019). Stop explaining black box machine learn-
ing models for high stakes decisions and use inter-
pretable models instead. Nature machine intelligence,
1(5):206–215.
Sallab, A. E., Abdou, M., Perot, E., and Yogamani,
S. (2017). Deep reinforcement learning frame-
work for autonomous driving. arXiv preprint
arXiv:1704.02532.
Schmidhuber, J. (2019). Reinforcement learning upside
down: Don’t predict rewards–just map them to ac-
tions. arXiv preprint arXiv:1912.02875.
Shah, D. and Xie, Q. (2018). Q-learning with nearest neigh-
bors. Advances in Neural Information Processing Sys-
tems, 31.
Shwartz-Ziv, R. and Armon, A. (2022). Tabular data: Deep
learning is not all you need. Information Fusion,
81:84–90.
Song, Y. and Wang, L. (2024). Multiobjective tree-based re-
inforcement learning for estimating tolerant dynamic
treatment regimes. Biometrics, 80(1):ujad017.
Srivastava, R. K., Shyam, P., Mutz, F., Ja
´
skowski, W.,
and Schmidhuber, J. (2019). Training agents using
upside-down reinforcement learning. arXiv preprint
arXiv:1912.02877.
Sutton, R. S. (1995). Generalization in reinforcement learn-
ing: Successful examples using sparse coarse coding.
Advances in neural information processing systems, 8.
Wehenkel, L., Ernst, D., and Geurts, P. (2006). Ensembles
of extremely randomized trees and some generic ap-
plications. In Robust methods for power system state
estimation and load forecasting.
Winter, E. (2002). The shapley value. Handbook of game
theory with economic applications, 3:2025–2054.
Yu, C., Liu, J., Nemati, S., and Yin, G. (2021). Reinforce-
ment learning in healthcare: A survey. ACM Comput-
ing Surveys (CSUR), 55(1):1–36.
Zhao, Y., Kosorok, M. R., and Zeng, D. (2009). Reinforce-
ment learning design for cancer clinical trials. Statis-
tics in medicine, 28(26):3294–3315.
IAI 2025 - Special Session on Interpretable Artificial Intelligence Through Glass-Box Models
868

APPENDIX
Input: f
θ
: Behavior function (e.g., neural network, random forest)
Input: M : Memory buffer with capacity M
Input: ε: Exploration rate
Procedure Train
episodes
Initialize S, C , A ←
/
0,
/
0,
/
0 ; // Training data
foreach episode in episodes do
T ← Length(episode);
t
1
← RandomInt(0, T − 1);
t
2
← T ;
d
r
← Sum
t
2
i=t
1
reward
i
;
d
t
← t
2
−t
1
;
S ← S ∪ {state
t
1
};
C ← C ∪ {[d
r
, d
t
]};
A ← A ∪ {action
t
1
};
end
UpdateBehaviorFunction( f
θ
, S , C , A);
Procedure CollectEpisode
d
r
, d
t
s
0
← ResetEnvironment;
T ←
/
0 ; // Episode transitions
while not terminal do
c ← [d
r
, d
t
] ; // Command vector
if random or rand() < ε then
a ← RandomAction();
end
else
a ← f
θ
(s, c);
end
s
′
, r, done ← Step(a);
T ← T ∪ {(s, a, r)};
d
r
← d
r
− r ; // Update desired return
d
t
← max(d
t
− 1, 1) ; // Update desired horizon
s ← s
′
;
end
M ← M ∪ T ; // Store episode
Procedure SampleCommands
M
B ← GetBestEpisodes(M , k) ; // Get k best episodes
d
h
← MeanHorizon(B);
¯
R ← MeanReturn(B);
σ
R
← StdReturn(B);
d
r
← U(
¯
R,
¯
R + σ
R
) ; // Sample desired return
return d
r
, d
t
;
Algorithm 1: Upside-Down Reinforcement Learning.
Upside-Down Reinforcement Learning for More Interpretable Optimal Control
869
