
Improving Geometric Consistency for 360-Degree Neural Radiance
Fields in Indoor Scenarios
Iryna Repinetska
2
, Anna Hilsmann
1 a
and Peter Eisert
1,2 b
1
Fraunhofer Institute for Telecommunications, Heinrich Hertz Institute, Berlin, Germany
2
Department of Computer Science, Humboldt University, Berlin, Germany
Keywords:
Novel View Synthesis, Neural Radiance Fields, Geometry Constraints, 360-Degree Indoor Dataset.
Abstract:
Photo-realistic rendering and novel view synthesis play a crucial role in human-computer interaction tasks,
from gaming to path planning. Neural Radiance Fields (NeRFs) model scenes as continuous volumetric func-
tions and achieve remarkable rendering quality. However, NeRFs often struggle in large, low-textured areas,
producing cloudy artifacts known as ”floaters” that reduce scene realism, especially in indoor environments
with featureless architectural surfaces like walls, ceilings, and floors. To overcome this limitation, prior work
has integrated geometric constraints into the NeRF pipeline, typically leveraging depth information derived
from Structure from Motion or Multi-View Stereo. Yet, conventional RGB-feature correspondence methods
face challenges in accurately estimating depth in textureless regions, leading to unreliable constraints. This
challenge is further complicated in 360-degree ”inside-out” views, where sparse visual overlap between ad-
jacent images further hinders depth estimation. In order to address these issues, we propose an efficient and
robust method for computing dense depth priors, specifically tailored for large low-textured architectural sur-
faces in indoor environments. We introduce a novel depth loss function to enhance rendering quality in these
challenging, low-feature regions, while complementary depth-patch regularization further refines depth con-
sistency across other areas. Experiments with Instant-NGP on two synthetic 360-degree indoor scenes demon-
strate improved visual fidelity with our method compared to standard photometric loss and Mean Squared
Error depth supervision.
1 INTRODUCTION
Neural Radiance Fields (NeRFs) provide a novel so-
lution to a fundamental challenge in computer vision:
generating new views from a set of posed 2D images
(Arandjelovi
´
c and Zisserman, 2021). By modeling a
scene as a continuous volumetric function and encod-
ing it into the weights of a neural network, NeRFs
achieve a remarkable balance between geometry and
appearance representation (Mildenhall et al., 2021).
This technology offers substantial benefits across ap-
plications such as virtual reality, augmented reality,
and robotics, where high-fidelity visualization is crit-
ical.
While NeRFs produce realistic renderings across
diverse settings, indoor environments with large,
low-textured surfaces—such as walls, floors, and
ceilings—present unique challenges. These areas
a
https://orcid.org/0000-0002-2086-0951
b
https://orcid.org/0000-0001-8378-4805
often lack distinctive visual features, which signif-
icantly hinders NeRF’s ability to accurately recon-
struct the scene, leading to potential inaccuracies that
compromise the quality of the final render (Wang
et al., 2022). This often leads to undesired artifacts
in the rendered views, with one of the most common
being ”floaters” (Roessle et al., 2022). They appear
as cloudy, erroneous, detached elements within the
scene, significantly degrading the visual quality and
realism of the generated views. Their occurrence is
closely tied to irregularities in density distribution,
stemming from inaccurate geometric estimates dur-
ing color-driven optimization (Roessle et al., 2022).
Imposing geometric constraints through depth super-
vision mitigates these issues, typically involving the
comparison of rendered depth with ground truth data
during the training process (Deng et al., 2022). How-
ever, acquiring accurate depth priors is an inherently
challenging task, as most depth estimation methods
rely on visual cues such as texture, edges, and shading
to determine depth, often leading to inaccuracies in
Repinetska, I., Hilsmann, A. and Eisert, P.
Improving Geometric Consistency for 360-Degree Neural Radiance Fields in Indoor Scenarios.
DOI: 10.5220/0013301500003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
725-734
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
725

featureless areas (Gasperini et al., 2023)—a common
characteristic of many views in indoor datasets. Ad-
ditionally, capturing views with a 360-degree camera
further complicates the task. Since the ”inside-out”
viewing direction results in sparse visual overlap be-
tween adjacent images, it is harder to align features
across views (Chen et al., 2023).
To overcome these challenges, we introduce an
efficient method for extracting dense depth priors
specifically for large planar architectural surfaces in
indoor spaces, such as ceilings, walls, and floors,
which are particularly susceptible to floaters. Our
approach is tailored to indoor environments, requir-
ing basic conditions that are easily met in typical
settings, such as aligning the Z-axis with the floor
plane normal. We assume the scene to be captured
by a 360-degree camera which efficiently scans the
entire rooms while being moved through the scene.
Mounted on a tripod or stand, it enables straightfor-
ward estimation of the ground plane. Additionally,
we assume that the room’s height is known or can
be measured, which is generally true for most indoor
settings. Our method is also supported by semantic
segmentation information of the image data, provid-
ing class labels for wall, floor, and ceiling. Given
the advanced state of current semantic segmentation
techniques, numerous pre-trained models are avail-
able that can generate segmentation masks for these
classes without requiring a computationally intensive
training process (Chen et al., 2017), (Ronneberger
et al., 2015), (Badrinarayanan et al., 2017).
Recognizing that architectural surfaces delineate
the boundaries of an indoor scene, we introduce a loss
function that encourages the alignment of a ray’s ter-
mination with these boundary surfaces—walls, floor,
and ceiling. This function also promotes the correct
distribution of volumetric densities along the ray, en-
suring that the regions the ray passes through before
hitting a boundary represent empty space, while den-
sity increases sharply at the boundary surfaces.
To further address flawed density distribution in
other areas, we implement a patch-based depth reg-
ularization method that utilizes bilateral or joint bi-
lateral filtering to smooth out depth inconsistencies
while preserving edge information.
To evaluate our approach, we created two syn-
thetic 360-degree indoor scenes. Rather than rely-
ing on stitched panoramic views, we propose an un-
conventional method that uses a series of unstitched
views, facilitating precise estimation of both extrinsic
and intrinsic camera parameters—critical for NeRFs
pipelines—and avoiding the geometric distortions in-
troduced by the typical stitching process. Addition-
ally, we assume the 360-degree camera is mounted on
a movable stand, enabling efficient capture of an en-
tire room and supporting dense depth estimation of
architectural surfaces.
Our results, demonstrated on a 360-degree in-
door dataset with Instant-NGP, show that incorpo-
rating depth supervision with our planar architec-
tural depth priors improves visual quality compared to
methods that rely solely on photometric loss. More-
over, our proposed depth loss for boundary surfaces
outperforms Mean Squared Error (MSE) loss on both
datasets, yielding superior visual coherence. Addi-
tionally, integrating our patch-based depth regular-
ization techniques further refines results, enhancing
depth consistency across the scene. Last but not least,
training with depth supervision using our depth pri-
ors accelerates the process, further enhancing the ef-
ficiency of our approach.
In summary, the main contributions of this work
are as follows:
• The generation of a synthetic 360-degree indoor
dataset, comprising two distinct scenes, which we
intend to make publicly available to support future
research.
• The design of an algorithm for producing dense
depth priors on planar architectural surfaces, such
as walls, ceilings, and floors.
• The formulation of a new depth loss function tai-
lored for these planar boundary surfaces.
• The development of a patch-based depth regular-
ization technique, incorporating bilateral and joint
bilateral filters.
2 RELATED WORK
Research to enhance NeRFs rendering quality has led
to various depth regularization and depth supervision
methods aimed at improving rendering quality by re-
fining the scene’s geometry.
Implicit regularization approaches leverage pre-
trained models to encode geometry and appearance
priors. For instance, Pixel-NeRF (Yu et al., 2021) di-
rectly integrates features from a convolutional neu-
ral network (CNN) trained on multiple scenes to
condition the NeRF model, while DietNeRF (Jain
et al., 2021) incorporates a regularization term in its
loss function to enforce consistency between high-
level features across both known and novel views.
However, these regularization methods often strug-
gle when applied directly to indoor datasets due to
domain gaps, as the CNNs are typically pre-trained
on ImageNet (Deng et al., 2009), which predomi-
nantly features natural images. Bridging this gap can
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
726

be resource-intensive and may require additional fine-
tuning (Chen et al., 2023).
Explicit regularization methods specifically target
high-frequency artifacts by smoothing inconsisten-
cies between adjacent regions. RegNeRF (Niemeyer
et al., 2022), for example, enforces similarity con-
straints on neighboring pixel patches, while InfoN-
eRF (Kim et al., 2022) minimizes a ray entropy model
to maintain consistent ray densities across views.
Although regularization techniques can enhance
rendering quality to some degree, their overall im-
pact remains limited (Chen et al., 2023). In contrast,
depth supervision addresses sparse scenarios and re-
gions with less prominent visual features by providing
a stronger optimization signal through an additional
depth constraint that leverages depth priors and en-
sures consistency between rendered and ground truth
depth (Rabby and Zhang, 2023). For instance, DS-
NeRF (Deng et al., 2022) and Urban-NeRF (Rematas
et al., 2022) incorporate a depth loss that adjusts the
predicted depth to match available sparse depth data.
In the context of indoor scene synthesis, notable
research efforts such as Dense Depth Priors (Roessle
et al., 2022) and NerfingMVS (Wei et al., 2021) have
proposed methods to enhance NeRF performance by
transforming sparse data points—typically a byprod-
uct of the Structure from Motion preprocessing step
used for estimating camera poses—into dense depth
maps using a monocular depth completion model.
In the first approach, these dense depth priors are
leveraged to guide the NeRF optimization process,
effectively accounting for uncertainty in depth esti-
mation while minimizing the error between predicted
and true depth values (Roessle et al., 2022). Nerf-
ingMVS (Wei et al., 2021) builds on this by cal-
culating loss through comparisons between rendered
depth and learned depth priors, incorporating confi-
dence maps to weigh the reliability of the depth es-
timates. These supervision strategies generally yield
superior results compared to those relying solely on
sparse depth points (Wang et al., 2023a). However,
their limitation lies in a lack of view consistency, as
each view is processed individually during the depth
completion step. StructNeRF (Chen et al., 2023) ad-
dresses this by incorporating photometric consistency,
comparing source images with their warped counter-
parts from other viewpoints in visually rich regions.
To handle non-textured areas, it introduces a regular-
ization loss that enforces planar consistency, encour-
aging points within regions identified by planar seg-
mentation masks to lie on a single plane. This ap-
proach helps maintain multi-view consistency, though
the warping process significantly increases computa-
tional cost (Wang et al., 2023c). Notably, methods
that utilize depth supervision struggle in areas with
low visual features, either because they inherit lim-
itations from Structure from Motion or Multi-View
Stereo depth estimates, or, as in the case of Struct-
NeRF, rely on warping for photometric consistency.
Research on 360-degree panorama NeRF-based
view synthesis, similar to the pinhole camera model,
widely applies additional depth supervision for op-
timization (Gu et al., 2022), (Wang et al., 2023b),
(Kulkarni et al., 2023). While PERF (Wang et al.,
2023b) estimates depth using a 360-degree depth esti-
mator, Omni-NeRF (Gu et al., 2022) and 360Fusion-
NeRF (Kulkarni et al., 2023) derive depth maps by
projecting 2D image pixels onto a spherical surface
and analyzing the intersections of rays with the scene
geometry from multiple views. However, since our
work involves images prior to their assembly into a
360-degree panorama and adheres to the pinhole cam-
era model, research focused on spherical projections
is not directly related to our scenario.
Compared to previous methods, our approach to
computing architectural priors for indoor scenes and
utilizing boundary loss shares similarities with Dense
Depth Priors (Roessle et al., 2022) and NerfingMVS
(Wei et al., 2021), as it follows the depth supervi-
sion approach using depth maps. Similar to Struct-
NeRF (Chen et al., 2023), we employ fundamental
architectural principles to address non-textured areas.
Unlike other studies, our approach imposes reliable
geometric constraints in featureless regions of large
architectural planes, without dependence on the inac-
curacies associated with photometric consistency in
these areas, thereby efficiently and effectively tack-
ling challenges in low-feature regions. Our depth
regularization technique shares conceptual similari-
ties with RegNeRF (Niemeyer et al., 2022) in its use
of patches. However, our approach not only smooths
out noise but also better preserves edges, enhancing
depth consistency without sacrificing structural detail.
3 DATASET
Our focus is on capturing indoor scenarios using a
360-degree camera. To cover the entire space, we
recommend a mounted, movable setup. Rather than
working with a stitched 360-degree panorama, we
propose using a series of individual raw views prior
to their assembly (see Figure 1). While unconven-
tional, this approach has the potential to significantly
improve the accuracy of extrinsic and intrinsic data
compared to a stitched panorama—essential for the
NeRF pipeline—and, consequently, enhance the over-
all quality of NeRF-rendered scenes (Gu et al., 2022).
Improving Geometric Consistency for 360-Degree Neural Radiance Fields in Indoor Scenarios
727

Hence, we generated a custom dataset in Blender
comprising two synthetic indoor scenes: a bedroom
(6×8×3.8 m) and a living room (10×10×3.4 m). Both
scenes are modeled with the floor at Z = 0 and the
origin at the center of the floor, with orthogonal co-
ordinate axes and the positive Z-axis extending up-
ward. Individual images of an unstitched 360-degree
panorama were captured using Blender’s perspective
camera with a 27
◦
horizontal and 40
◦
vertical field of
view. Each 360-degree horizontal sweep consisted of
15 images, spaced at 24
◦
intervals, with 5 additional
images covering the ceiling by first rotating the cam-
era upward and tilting it in four directions. A 3
◦
over-
lap between adjacent images ensured seamless assem-
bly. Cameras were positioned in a grid pattern across
the scene with random noise added for realism.
The living room dataset comprises 1200 training
images and 540 evaluation images, while the bedroom
dataset includes 840 training images and 300 evalu-
ation images. Each RGB image, at a resolution of
1080×1920 pixels, is provided with camera param-
eters, depth maps, and segmentation maps for pla-
nar architectural surfaces such as floors, ceilings, and
walls.
4 METHODOLOGY
In this section, we outline our methodology for en-
hancing NeRF rendering quality in indoor environ-
ments, specifically focusing on reducing cloudy arti-
facts, commonly called ”floaters”, that often appear
on featureless surfaces. Our approach incorporates
custom depth estimation techniques for planar archi-
tectural surfaces, such as walls, floors, and ceilings,
along with a loss function tailored for boundary re-
gions. Moreover, we propose a depth regularization
technique that complements the previous approach by
refining rendering quality across the entire scene.
We begin by discussing depth supervision tech-
niques, followed by an introduction of a novel depth
estimation method explicitly designed for planar ar-
chitectural surfaces in indoor scenes. Next, we in-
troduce a boundary loss function that enforces spa-
tial constraints, improving depth accuracy along ar-
chitectural boundaries. Finally, we outline our custom
patch-based depth regularization method.
4.1 Depth Supervision
Depth supervision is an effective approach to mitigate
floating artifacts by comparing rendered and ground
truth depth (Wang et al., 2023a). It constrains the den-
sity distribution, enforcing geometric consistency.
Specifically, the color
ˆ
C(r) and depth
ˆ
D(r) of a
pixel along a ray r are rendered by NeRFs as follows:
ˆ
C(r) =
N
∑
i=1
w
i
c
i
, (1)
ˆ
D(r) =
N
∑
i=1
w
i
t
i
, (2)
where
ˆ
C(r) is the final color rendered for the pixel
along ray r, and
ˆ
D(r) is the estimated depth from the
camera to the pixel along ray r. Here, N denotes the
number of samples along r.
The weight for the i-th sample, representing the
contribution of a sample i along the ray r to the final
color and depth values for the corresponding pixel, is
defined as:
w
i
= T
i
α
i
. (3)
The transmittance T
i
at sample i, indicating the
probability of light reaching the sample unimpeded,
is defined as:
T
i
= exp
−
i−1
∑
j=1
σ
j
∆
j
!
. (4)
The opacity α
i
at sample i represents the likeli-
hood that light is absorbed or scattered at sample i
and is given by:
α
i
= 1 − exp(−σ
i
∆
i
). (5)
Further, σ
i
is the volume density at sample i and
∆
i
= t
i+1
− t
i
is the distance between adjacent sam-
ples. Here, c
i
represents the RGB color, and t
i
is the
distance from the camera origin to the i-th sample.
NeRFs are optimized by enforcing rendered color
consistency through a photometric loss function,
commonly defined as the Mean Squared Error (MSE)
between the rendered and ground truth pixel colors
(Rabby and Zhang, 2023):
L
color
=
∑
r∈R
ˆ
C(r) −C(r)
2
2
, (6)
where R represents the set of rays in each training
batch, and C(r) and
ˆ
C(r) denote the ground truth and
predicted RGB colors for each ray r, respectively.
Depth supervision is applied by combining this
photometric loss with an additional depth loss:
L = λ
color
L
color
+ λ
depth
L
depth
, (7)
where λ
color
and λ
depth
are weighting factors that bal-
ance the contributions of the photometric and depth
losses, respectively.
In this work, we utilize an MSE loss to compare
the rendered and ground truth depths:
L
depth
=
∑
r∈R
ˆ
D(r) −D(r)
2
2
. (8)
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
728

Figure 1: Raw images captured with a pinhole camera model, showing unstitched frames prior to assembly into a 360-degree
panorama. The living room is depicted in the first two rows and the bedroom in the last two. The first 15 images (from top
left to bottom right) depict a 360-degree horizontal sweep, while the final 5 images capture the upper surroundings.
Here, D(r) and
ˆ
D(r) are the ground truth and pre-
dicted depths, respectively, for ray r from the ray
batch R .
However, depth supervision relies on accurate
ground truth depth data, which is often difficult to
obtain in real-world scenarios (Ming et al., 2021).
A common approach for acquiring depth priors for
NeRF is through Structure from Motion techniques,
particularly COLMAP, which generates depth infor-
mation as a byproduct of camera pose estimation
(Roessle et al., 2022). Since Structure from Motion
methods rely on keypoint matching across multiple
images to establish correspondences, they often strug-
gle on textureless areas lacking distinctive visual fea-
tures—a challenge especially pronounced in indoor
environments dominated by uniform architectural sur-
faces.
4.2 Depth Estimation for Planar
Architectural Surfaces
We propose a fast, simple, and computationally effi-
cient method to estimate depth in featureless indoor
regions such as walls, floors, and ceilings. The ap-
proach assumes the Z-axis origin is calibrated to lie
on the floor plane. If not, three non-collinear camera
positions at a constant height (e.g., tripod-mounted)
must be available. Room height must also be known,
along with semantic segmentation for wall, floor, and
ceiling classes, which can be efficiently generated us-
ing pretrained models such as DeepLab (Chen et al.,
2018).
Depth computation leverages the NeRF ray repre-
sentation (Mildenhall et al., 2021), defined as:
r(t) = o +td
unit
, (9)
where o is the camera origin and d
unit
is a unit vector
representing the ray direction. Using camera parame-
ters, the Euclidean depth t of a pixel P is determined
by setting one known component of its 3D world co-
ordinate (e.g., the Z-coordinate P
z
, which represents
Improving Geometric Consistency for 360-Degree Neural Radiance Fields in Indoor Scenarios
729
height in 3D space). Knowing t allows the recovery
of the remaining 3D coordinates of P.
For floors and ceilings, if the Z-axis origin lies
on the floor, floor depth can be computed directly
by setting P
z
= 0, while ceiling depth is computed
by setting P
z
to the ceiling height. Without calibra-
tion, the plane equation s
cam
is derived from three
non-collinear camera positions. Parallel planes are
then calculated at distances equal to the camera height
above and below s
cam
. The floor plane s
floor
is identi-
fied as the parallel plane that intersects the ray corre-
sponding to an arbitrary floor pixel. Next, the ceiling
plane s
ceil
is determined similarly, accounting for the
ceiling height relative to the camera.
To estimate wall depths, border pixels where walls
meet the ceiling and floor are first identified. Three
non-collinear points (two from one border and one
from the other) are selected to define the wall plane
s
wall
. Finally, depth for walls, ceiling, and floor is
computed as the Euclidean distance from the ray ori-
gins of pixels belonging to the corresponding segmen-
tation classes to their intersection points with the re-
spective planes.
4.3 Boundary Loss for Architectural
Surfaces
When a ray travels through open space within a room
and does not intersect any surface, its transmittance T
i
remains high, meaning the ray continues unimpeded
through the scene, while its opacity α
i
remains low,
reflecting the absence of intersecting material. This
combination of high transmittance and low opacity
produces low weights along the ray’s path (see eq.
(3)), as there is minimal interaction to indicate bound-
aries, as depicted by the yellow downward arrows in
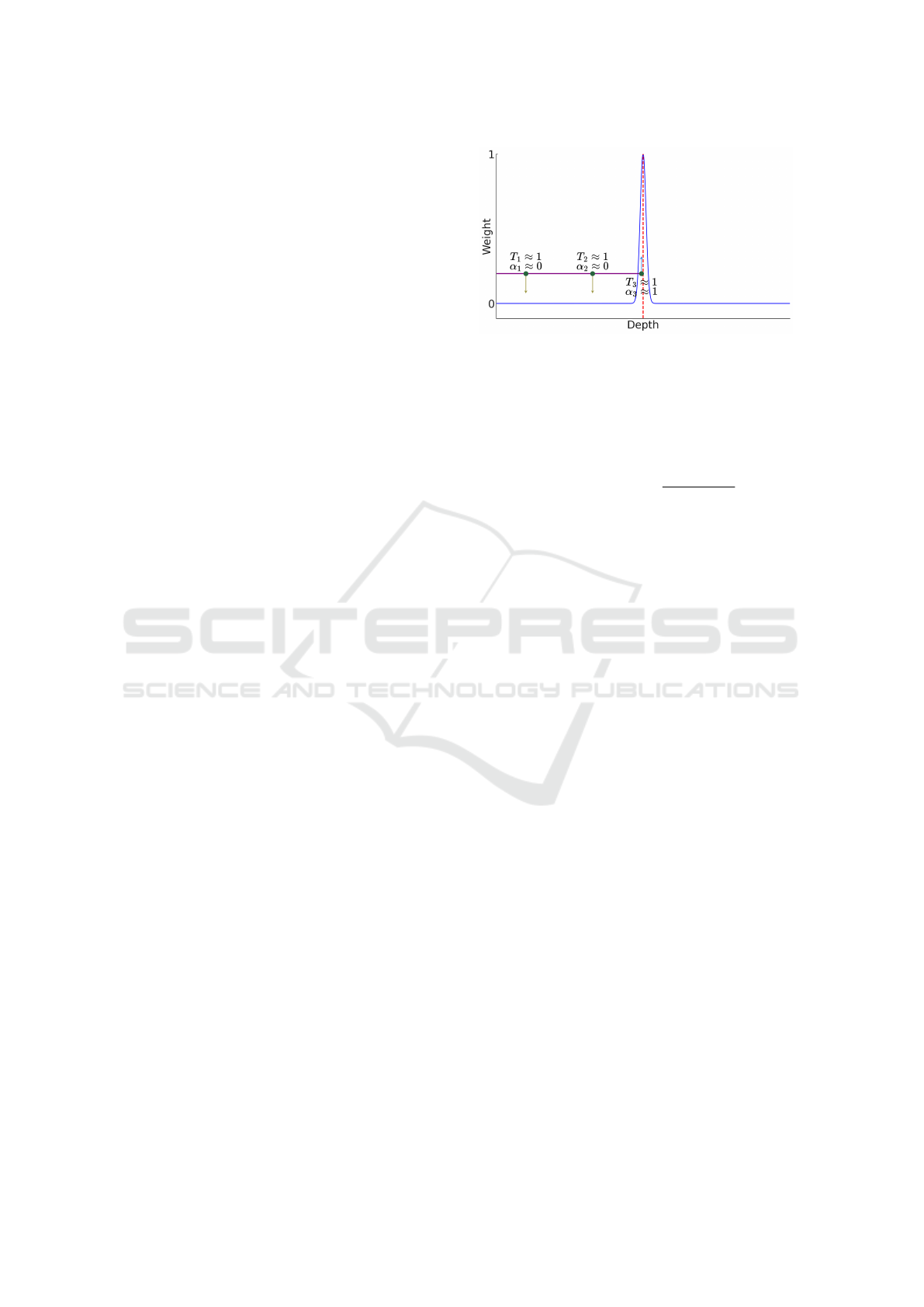
Figure 2.
However, as the ray reaches a boundary surface
(like a wall or ceiling), the interaction characteristics
change. The transmittance T
i
remains high initially,
as the ray is still progressing through space, but the
opacity α
i
begins to rise due to the increasing ma-
terial density encountered at the boundary. As illus-
trated by the upward blue arrow in Figure 2, this in-
crease in opacity correlates with higher weights near
the boundary, highlighting the role of these architec-
tural surfaces in defining the spatial limits within the
scene. When the ray finally intersects a boundary sur-
face, the weights along the ray peak, often reaching a
maximum (e.g., a weight of 1), as the ray’s traversal
is effectively complete (Szeliski, 2022).
Based on these observations, we introduce a
boundary loss function that leverages our architec-
Figure 2: Illustration of a Gaussian distribution modeling
the weight w
i
along a ray which hits the boundary surface
(e.g., a wall) depicted by the red dotted line. The purple
solid line indicates the ray with the green dots representing
samples.
tural depth priors:
L
bound
=
∑
r∈R
∑
i
w
i
− e
−
(t
i
− D(r))
2
2σ
2
2
, (10)
where D(r) is the ground truth depth of ray r from
ray batch R , w
i
is a weight corresponding to a point,
which is sampled on the ray r at the distance t
i
from
the ray origin.
For pixels corresponding to architectural surfaces,
the boundary loss penalizes weights of samples far
from the surface and boosts weights close to it, en-
forcing correct architectural constraints.
4.4 Patch-Based Depth Regularization
To complement our depth supervision on planar ar-
chitectural surfaces and mitigate rendering irregulari-
ties beyond these regions, we draw inspiration from
Reg-NeRF (Niemeyer et al., 2022) and propose a
depth regularization method that operates on image
patches. This approach promotes smooth and con-
sistent depth predictions across rendered views, ef-
fectively reducing noise and artifacts while preserv-
ing essential structural details. Specifically, we apply
a bilateral (Tomasi and Manduchi, 1998) or joint bi-
lateral filter (He et al., 2012) to regularize the depth
within each patch.
Filtering the Depth Patch. We begin by apply-
ing a bilateral or joint bilateral filter to a rendered
depth patch
ˆ
D(p), where p is a patch from the set P.
The bilateral filter accounts for both spatial proxim-
ity and depth similarity, while the joint bilateral fil-
ter additionally considers intensity similarity in the
corresponding RGB image. This method ensures that
the smoothing of depth values respects the structural
edges present in the image.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
730

Computing the Regularization Loss. For each
depth patch p ∈ P, we calculate the Mean Squared Er-
ror (MSE) between the original rendered depth patch
ˆ
D(p) and the filtered depth patch F (
ˆ
D(p)). We then
compute the average of these MSE losses across all
patches in P to obtain a single regularization term:
L
reg
=
1
|P|
∑
p∈P
1
|p|
∑
i, j
ˆ
D(p
i j
) − F (
ˆ
D(p))
i j
2
. (11)
This regularization term is incorporated into the
total loss function in the same manner as depth super-
vision (see eq. 7).
5 EXPERIMENTS
To evaluate the effectiveness of our approach in en-
hancing NeRF rendering quality in indoor environ-
ments, we conducted a series of experiments using
Instant-NGP (M
¨
uller et al., 2022) within the Nerfs-
tudio framework (Tancik et al., 2023). Instant-NGP
was chosen for its hash encoding, which captures ob-
jects of varying sizes, and occupancy grids, which fo-
cus computation on meaningful areas in indoor scenes
with significant empty space. Given computational
constraints, we downsampled our datasets by a factor
of two, resulting in a final resolution of 540x960 pix-
els. All models were trained on an NVIDIA GeForce
RTX 3090 GPU using the Adam optimizer with pa-
rameters β
1
= 0.9, β
2
= 0.99, and ε = 10
−8
. Neither
weight decay nor gradient clipping was applied. We
set the hash table size T to 22, the maximum resolu-
tion N
max
to 32,768, the density MLP to a depth of 2
and a width of 64, and the color MLP to a depth of
2 and a width of 128. These values were determined
through hyperparameter optimization. All other hy-
perparameters followed Nerfstudio defaults. It took
200,000 iterations to train the models with photomet-
ric loss on both scenes, with performance plateauing
beyond this point.
Patch-Based Depth Regularization. We imple-
mented patch-based regularization using the open-
source library Kornia, utilizing its default parameters
for bilateral and joint bilateral filters: a 9 × 9 kernel
size, range sigma (σ
color
) of 10 to control intensity
similarity, and spatial sigma (σ
space
) of 75 × 75 to de-
fine the spatial extent of the filter.
Training with patches significantly extended the
process, requiring additional time for the network to
capture global image structure. To address this, the
model was first trained to convergence with photo-
metric loss, followed by patch-based regularization
to refine details. We trained with a patch size of 16,
as larger patches (32 and 64) remained undertrained
even after 400,000 iterations and significantly in-
creased training time. The best results were achieved
with λ
color
= 1 and λ
reg
= 10
−7
for both bilateral and
joint bilateral loss. Models using these parameters
converged in 280,000 iterations. For comparison, we
implemented patch similarity constraints as described
in RegNeRF (Niemeyer et al., 2022), following the
same training strategy.
Depth Supervision with Planar Architectural
Depth Priors. As a preprocessing step, we computed
depth estimates for the floor, ceiling, and walls using
semantic segmentation generated in Blender. To eval-
uate the accuracy of these depth priors, we compared
them against Blender-generated depth maps as ground
truth. The results demonstrated high accuracy, with
Root Mean Square Error (RMSE) values of 2.786 mm
for the bedroom scene and 3.201 mm for the living
room scene.
Next, we incorporated these architectural depth
priors into the training process. Instant-NGP was
trained on both scenes with depth supervision, em-
ploying MSE and BoundL loss alongside the pri-
ors, continuing each model until convergence. For
models utilizing BoundL, we set δ to 1 mm. The
weight values for the losses were set to λ
color
= 10
and λ
depth
= 10 for the bedroom scene, and λ
color
= 1
and λ
depth
= 1 for the living room scene. Depth-
supervised models converged in only 120,000 itera-
tions, demonstrating the efficiency of incorporating
planar architectural depth priors into the training pro-
cess.
6 RESULTS
Renderings produced by our baseline model, which
relies solely on photometric loss, confirm our ini-
tial observation: ”floaters” are more common on tex-
tureless surfaces like walls, floors, and ceilings (see
Figure 4). In contrast, objects with rich visual fea-
tures—such as plants, books, and paintings—exhibit
fewer floaters, as shown in Figure 3. Notably, cloudy
artifacts consistently align with incorrect depth esti-
mations. This outcome underscores the limitations
of NeRFs when relying solely on RGB optimization
signals to accurately predict geometric constraints in
featureless regions. Interestingly, some inconsisten-
cies in the rendered depth maps did not produce visi-
ble artifacts in the color image, indicating a degree of
tolerance in NeRF’s volume rendering.
Visual observations reveal a noticeable reduction
in artifacts for depth-guided methods compared to
those without depth supervision (see Figure 5). More-
over, the BoundL loss demonstrates fewer artifacts
Improving Geometric Consistency for 360-Degree Neural Radiance Fields in Indoor Scenarios
731

Figure 3: Renderings with Instant-NGP trained on our 360-
degree indoor dataset using photometric loss show high vi-
sual fidelity on detail-rich areas.
Figure 4: Renderings produced by Instant-NGP trained on
our 360-degree indoor dataset with photometric loss are
displayed alongside their corresponding depth maps. Red
bounding boxes highlight floaters in front of walls, ceilings,
or floors, caused by incorrect depth estimations.
than MSE loss, producing cleaner and more accu-
rate renderings (see Figure 6). This is likely due to
BoundL’s ability to directly address the weights of
samples, effectively reducing ambiguity during the
volume rendering procedure.
To quantitatively compare our models, we em-
ploy standard view synthesis evaluation metrics: Peak
Signal-to-Noise Ratio (PSNR), Structural Similarity
Index Measure (SSIM), and Learned Perceptual Im-
age Patch Similarity (LPIPS). As expected, mod-
els with depth supervision outperform their counter-
parts, with BoundL loss (both with and without joint-
bilateral regularization) achieving the highest metrics.
Our patch-based regularization methods deliver
consistent quality improvements across both indoor
scenes (see Table 1), achieving better metrics com-
(a) RGB (b) BoundL (c) RGB (d) BoundL
(e) RGB (f) BoundL (g) RGB (h) BoundL
Figure 5: Renderings with Instant-NGP trained on our 360-
degree indoor dataset, using photometric loss in (a), (c), (e),
and (g), and depth supervision with BoundL in (b), (d), (f),
and (h). Red bounding boxes highlight floaters, which are
minimized through depth guidance with planar architectural
depth priors and BoundL.
pared to RegNeRF’s depth patch regularization. This
advantage is likely due to the ability of bilateral and
joint-bilateral filtering to reduce noise while preserv-
ing sharp edge transitions and essential structural de-
tails. Moreover, joint-bilateral regularization demon-
strates additional gains over the bilateral approach.
Notably, performance metrics vary across scenes,
with the living room consistently outperforming the
bedroom. This is likely due to obstructions in the bed-
room—such as the large bed—limiting ray coverage
in occluded areas.
Further, depth-supervised models also demon-
strate faster convergence, requiring only 120,000 iter-
ations compared to 200,000 for models trained solely
on RGB loss (see Figure 6), and 280,000 iterations
for those using patch-based depth supervision. This
speedup is attributed to depth supervision, which en-
ables the model to quickly identify empty spaces, con-
centrate sampling on occupied regions, and provide a
stronger optimization signal (Deng et al., 2022).
7 CONCLUSIONS
This research tackles the challenge of textureless re-
gions for NeRF-based novel view synthesis in in-
door environments. To address this, we developed
a depth guidance approach for large planar surfaces,
such as walls, floors, and ceilings—regions where
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
732

Table 1: Quantitative comparison for 360-degree indoor scenes on the evaluation dataset. We report PSNR, SSIM and LPIPS.
”Arch. planar” refers to depth-guided methods that utilize depth priors for architectural planar surfaces.
Method
Bedroom Scene Livingroom Scene
PSNR ↑ SSIM ↑ LPIPS ↓ PSNR ↑ SSIM ↑ LPIPS ↓
Only RGB loss 31.163 0.749 0.378 34.008 0.856 0.268
Arch. planar + MSE 34.174 0.762 0.327 36.790 0.869 0.252
Arch. planar + BoundL 34.309 0.792 0.285 36.902 0.921 0.248
RegNeRF patch 30.830 0.750 0.361 34.033 0.858 0.259
Bilateral filter 31.890 0.750 0.359 35.200 0.858 0.256
Joint bilateral filter 32.709 0.763 0.342 36.127 0.871 0.256
Arch. planar + BoundL with joint
bilateral
34.410 0.765 0.281 36.935 0.898 0.245
(a) MSE (b) BoundL (c) MSE (d) BoundL
(e) RGB (f) BoundL (g) RGB (h) BoundL
Figure 6: Renderings with Instant-NGP trained on our 360-
degree indoor dataset: (a)-(d) compare depth supervision
methods, with MSE in (a) and (c), and BoundL in (b) and
(d). Red boxes highlight areas where MSE results exhibit
rendering artifacts that BoundL successfully mitigates. (e)-
(h) illustrate the faster convergence of models with depth
supervision, showing BoundL examples in (f) and (h) and
photometric loss in (e) and (g).
NeRFs often struggle. Specifically, we proposed an
efficient method to compute depth priors for the men-
tioned surfaces and introduced a depth loss func-
tion, BoundL, to enforce depth constraints on these
planar boundaries. This is complemented by our
patch-based regularization, which utilizes bilateral
and joint-bilateral filtering.
To evaluate our approach, we created a syn-
thetic indoor dataset comprising two distinct scenes
that simulate individual views within a 360-degree
panorama prior to assembly. Working with a series
of raw images captured with a pinhole camera model
aids in determining accurate image poses, eliminating
the need to account for geometric distortions in the fi-
nal 360-degree stitched panorama.
Our results demonstrate clear improvements in
rendering quality, both visually and quantitatively,
when incorporating our planar depth priors with depth
supervision through MSE and BoundL loss. Notably,
BoundL consistently outperforms MSE across both
scenes. Additionally, our patch regularization tech-
niques surpass RegNeRF’s patch depth constraints,
yielding subtle yet stable quantitative gains.
With all enhancements enabled, we achieved an
increase in PSNR of up to 3 dB compared to the base-
line model using only photometric loss. These im-
provements underscore the robustness and effective-
ness of our approach in refining NeRF rendering for
complex indoor environments.
Future work will extend our methods to real-world
data, with optimizations to account for noisy cam-
era parameters. Additionally, incorporating sparse
depth data from feature-rich regions and enforcing
strict planarity on other linear surfaces could further
improve model accuracy and rendering quality.
ACKNOWLEDGEMENTS
This work has partly been funded by the German
Federal Ministry for Digital and Transport (project
EConoM, grant no 19OI22009C) and the German
Federal Ministry of Education and Research (project
VoluProf, grant no. 16SV8705).
REFERENCES
Arandjelovi
´
c, R. and Zisserman, A. (2021). Nerf in
detail: Learning to sample for view synthesis.
arXiv:2106.05264.
Badrinarayanan, V., Kendall, A., and Cipolla, R. (2017).
Segnet: A deep convolutional encoder-decoder archi-
tecture for image segmentation. IEEE Trans. on Pat-
Improving Geometric Consistency for 360-Degree Neural Radiance Fields in Indoor Scenarios
733

tern Analysis and Machine Intelligence, 39(12):2481–
2495.
Chen, L.-C., Papandreou, G., Schroff, F., and Adam, H.
(2017). Rethinking atrous convolution for semantic
image segmentation. arXiv:1706.05587.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sep-
arable convolution for semantic image segmentation.
In ECCV.
Chen, Z., Wang, C., Guo, Y.-C., and Zhang, S.-H. (2023).
Structnerf: Neural radiance fields for indoor scenes
with structural hints. IEEE Trans. on Pattern Analysis
and Machine Intelligence.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In IEEE Conf. on Computer Vision
and Pattern Recognition, pages 248–255.
Deng, K., Liu, A., Zhu, J.-Y., and Ramanan, D. (2022).
Depth-supervised nerf: Fewer views and faster train-
ing for free. In IEEE/CVF Conference on Computer
Vision and Pattern Recognition, pages 12882–12891.
Gasperini, S., Morbitzer, N., Jung, H., Navab, N., and
Tombari, F. (2023). Robust monocular depth estima-
tion under challenging conditions. In Proc. IEEE/CVF
Int. Conf. on Computer Vision, pages 8177–8186.
Gu, K., Maugey, T., Knorr, S., and Guillemot, C. (2022).
Omni-nerf: neural radiance field from 360 image cap-
tures. In IEEE Int. Conf. on Multimedia and Expo
(ICME).
He, K., Sun, J., and Tang, X. (2012). Guided image filtering.
IEEE transactions on pattern analysis and machine
intelligence, 35(6):1397–1409.
Jain, A., Tancik, M., and Abbeel, P. (2021). Putting nerf on
a diet: Semantically consistent few-shot view synthe-
sis. In Proc. IEEE/CVF International Conference on
Computer Vision, pages 5885–5894.
Kim, M., Seo, S., and Han, B. (2022). Infonerf: Ray en-
tropy minimization for few-shot neural volume ren-
dering. In Proc. IEEE/CVF Conference on Computer
Vision and Pattern Recognition, pages 12912–12921.
Kulkarni, S., Yin, P., and Scherer, S. (2023). 360fusionnerf:
Panoramic neural radiance fields with joint guidance.
In IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS), pages 7202–7209.
Mildenhall, B., Srinivasan, P. P., Tancik, M., Barron, J. T.,
Ramamoorthi, R., and Ng, R. (2021). Nerf: Repre-
senting scenes as neural radiance fields for view syn-
thesis. Communications of the ACM, 65(1):99–106.
Ming, Y., Meng, X., Fan, C., and Yu, H. (2021). Deep
learning for monocular depth estimation: A review.
Neurocomputing, 438:14–33.
M
¨
uller, T., Evans, A., Schied, C., and Keller, A. (2022).
Instant neural graphics primitives with a multiresolu-
tion hash encoding. ACM Trans. on Graphics (TOG),
41(4):1–15.
Niemeyer, M., Barron, J. T., Mildenhall, B., Sajjadi, M. S.,
Geiger, A., and Radwan, N. (2022). Regnerf: Reg-
ularizing neural radiance fields for view synthesis
from sparse inputs. In Proc. IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
5480–5490.
Rabby, A. and Zhang, C. (2023). Beyondpixels: A com-
prehensive review of the evolution of neural radiance
fields. arXiv:2306.03000.
Rematas, K., Liu, A., Srinivasan, P. P., Barron, J. T.,
Tagliasacchi, A., Funkhouser, T., and Ferrari, V.
(2022). Urban radiance fields. In Proc. IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 12932–12942.
Roessle, B., Barron, J. T., Mildenhall, B., Srinivasan, P. P.,
and Nießner, M. (2022). Dense depth priors for neural
radiance fields from sparse input views. In Proc. Int.
Conf. on Computer Vision and Pattern Recognition.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In Proc. 18th Int. Conf. on Medical image
computing and computer-assisted intervention (MIC-
CAI), pages 234–241.
Szeliski, R. (2022). Computer vision: algorithms and ap-
plications. Springer Nature.
Tancik, M., Weber, E., Ng, E., Li, R., Yi, B., Wang, T.,
Kristoffersen, A., Austin, J., Salahi, K., Ahuja, A.,
et al. (2023). Nerfstudio: A modular framework
for neural radiance field development. In ACM SIG-
GRAPH 2023 Conference Proceedings, pages 1–12.
Tomasi, C. and Manduchi, R. (1998). Bilateral filtering for
gray and color images. In Proc. IEEE/CVF Interna-
tional Conference on Computer Vision.
Wang, C., Sun, J., Liu, L., Wu, C., Shen, Z., Wu, D., Dai,
Y., and Zhang, L. (2023a). Digging into depth priors
for outdoor neural radiance fields. In Proc. 31st ACM
Int. Conference on Multimedia, pages 1221–1230.
Wang, G., Wang, P., Chen, Z., Wang, W., Loy, C. C., and
Liu, Z. (2023b). Perf: Panoramic neural radiance field
from a single panorama. arXiv:2310.16831.
Wang, J., Wang, P., Long, X., Theobalt, C., Komura, T.,
Liu, L., and Wang, W. (2022). Neuris: Neural recon-
struction of indoor scenes using normal priors. In Eu-
ropean Conference on Computer Vision, pages 139–
155. Springer.
Wang, Y., Xu, J., Zeng, Y., and Gong, Y. (2023c).
Anisotropic neural representation learning for high-
quality neural rendering. arXiv:2311.18311.
Wei, Y., Liu, S., Rao, Y., Zhao, W., Lu, J., and Zhou, J.
(2021). Nerfingmvs: Guided optimization of neural
radiance fields for indoor multi-view stereo. In Proc.
IEEE/CVF International Conference on Computer Vi-
sion, pages 5610–5619.
Yu, A., Ye, V., Tancik, M., and Kanazawa, A. (2021). pix-
elnerf: Neural radiance fields from one or few im-
ages. In Proc. IEEE/CVF conference on computer vi-
sion and pattern recognition, pages 4578–4587.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
734
