Double Q-Learning for a Simple Parking Problem:
Propositions of Reward Functions and State Representations
Przemysław Kle¸sk
a
Faculty of Computer Science and Information Technology, West Pomeranian University of Technology in Szczecin,
ul.
˙
Zołnierska 49, 71-210 Szczecin, Poland
Keywords:
Car Parking, Double Q-Learning, Neural Approximations, Parameterized Reward Functions, State
Representations.
Abstract:
We consider a simple parking problem where the goal for the learning agent is to park the car from a range
of initial random positions to a target place with front and back end-points distinguished, without obstacles
in the scene but with an imposed time regime, e.g. 25s. It is a sequential decision problem with a continuous
state space and a high frequency of decisions to be taken. We employ the double Q-learning computational
approach, using the bang–bang control and neural approximations for the Q functions. Our main focus is laid
on the design of rewards and state representations for this problem. We propose a family of parameterized
reward functions that include, in particular, a penalty for the so-called “gutter distance”. We also study several
variants of vector state representations that (apart from observing velocity and direction) relate some key points
on the car with key points in the park place. We show that a suitable combination of the state representation
and rewards can effectively guide the agent towards better trajectories. Thereby, the learning procedure can be
carried out within a reasonably small number of episodes, resulting in high success rate at the testing stage.
1 INTRODUCTION
Driving a car can be seen as a sequential decision
problem that can be subjected to reinforcement learn-
ing (RL) algorithms, Q-learning in particular. Deci-
sions in such a task are commonly called “microde-
cisions” because of their high frequency
1
. Human
drivers also take many small decisions in order to:
correct velocity or direction, glance in the mirror, start
to brake, react to other vehicles movement, etc. Some
of those are half-conscious or reflexive decisions (Sall
et al., 2019; Sprenger, 2022).
In this paper we consider a simplified variant of
the car parking problem, where the goal for the learn-
ing agent is to drive the car from an initial position
(drawn from a certain random distribution) to the tar-
get park place with front and back end-points distin-
guished, and to fully stop the car there. No obstacles
are present in the scene but the task must be com-
pleted within an imposed time limit, e.g. 25 s. Fig. 1
provides an example illustration of this problem set-
ting — the non-filled light blue rectangle represents
a
https://orcid.org/0000-0002-5579-187X
1
Despite the name, gaps between decision moments are
not necessarily at the level of microseconds.
the park place (with ‘F’ and ‘B’ letters denoting its
front and back) and the dashed border marks the re-
gion of random initial positions for the car
2
.
Figure 1: Example illustration of the simple car parking
problem.
We implement the bang–bang control scenario in
this paper. This means that there exists a finite set
2
The car’s initial direction angle is also drawn from a
certain random range.
156
KlÈl’sk, P.
Double Q-Learning for a Simple Parking Problem: Propositions of Reward Functions and State Representations.
DOI: 10.5220/0013302100003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 156-171
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

of acceleration vectors (or equivalently force vectors)
that can be applied on the car at decision moments.
An applied acceleration can be either completely on
or off. Fractional application is not permitted. In
Fig. 1, the dark green line is the current velocity vec-
tor — the car is traveling roughly forwards (to the left
of the image); whereas the red line, directed almost
oppositely, represents the imposed acceleration vec-
tor — the car starts to brake and gently turn left as it
is approaching the park place. Light orange and green
curves mark traces of front and back wheels, respec-
tively. Gray lines represent vectors pointing from the
car corners to their ideal positions in the park place.
The general computational approach that we have
employed in the reasearch underlying this paper
is compliant with the double Q-learning technique
(Hasselt, 2010; Hasselt et al., 2016). This means there
are two approximators of the Q function involved.
We use several-layers-deep, dense neural networks
with ReLU activations as approximators. One net-
work is used for making decisions during the parking
attempts, and simultaneously for learning via expe-
rience replay. Weights of that network are updated
quite frequently. The second network, with the same
structure, stays frozen for long periods and plays the
role of a “pseudo-oracle”. It serves the purpose of
providing stable target values for the supervised learn-
ing of the first network. After suitably many training
steps, the target network gets switched — that is, the
weights from the online network are copied to the tar-
get network.
1.1 A “Needle in a Haystack”
Motivation
The main points of interest in this paper are reward
functions and state representations for the defined
parking problem. It should be well understood that in
rich environments with continuous state spaces, sim-
ple non-informed reward functions do not work well.
Imagine a car parking agent that starts wandering ran-
domly 10 meters away from the park place. If, for
example, that agent is rewarded solely with a −∆t
value after each small time step in which he did not
succeed to “land” in the park place (e.g. −0.1 s re-
ward for the time consumed per step), then clearly he
should not be expected to learn anything. The func-
tion being approximated is flat almost everywhere.
The fact that the success event requires the car to be
accurately placed (with only a small deviation toler-
ated distance- and angle-wise), and moreover fully
stopped, makes such an event extremely unlikely to
be discovered accidentally — just like a “needle in a
haystack”. Naturally, one might try to extend the −∆t
reward with an extra summand that estimates the re-
maining time needed to reach the target. This could
be done e.g. based on the remaining straight-line dis-
tance and assuming some average velocity while ma-
neuvering. As we show in the paper, such an exten-
sion is only a minor improvement, not sufficient to
significantly speed up the learning process.
1.2 Main Contribution
In the paper we propose and study a parameterized
reward function for the parking problem, with three
penalty terms pertaining to: (a) the straight-line dis-
tance, (b) the angular deviation between direction
vectors of the car and the park place, and (c) an ad-
ditional quantity named the “gutter distance”. We
indicate good proportions between those terms, rep-
resented by suitable penalty coefficients discovered in
experiments.
Furthermore, we experiment with several vari-
ants of state representations with information re-
dundancy that constitute the input to neural models.
Apart from the car direction and velocity, the rep-
resentations include additional vector-based informa-
tion that relates key points on the car with key points
in the park place. Our results demonstrate that a suit-
able combination of the state representation and re-
wards can effectively guide the parking agent towards
better trajectories. Thereby, the learning quality is im-
proved and the process can be carried out within a
reasonably small number of episodes.
2 PRELIMINARIES
2.1 Q Functions
Given a policy P — a mapping from the set of states
to the set of actions, the Q
P
(s,a) function is de-
fined to return the expected sum of all future rewards
R
t+1
,R
t+2
,.. . (random variables), discounted expo-
nentially by a decay rate γ ∈ [0,1), conditional on the
fact that at the starting state S
t
= s one performs action
a, and from thereafter follows the policy P :
3
Q
P
(s,a)=E
R
t+1
+γR
t+2
+γ
2
R
t+3
+···|S
t
=s,A
t
=a;P
.
(1)
This means that for all attained subsequent states s
t+k
,
k = 1,2,. .. , the agent takes actions a
t+k
yielded by
the policy: a
t+k
= P (s
t+k
), whereas the initial action
3
Capital letters under the expectation E(·) in (1) repre-
sent random variables and lowercase ones their realizations
i.e. the values attained.
Double Q-Learning for a Simple Parking Problem: Propositions of Reward Functions and State Representations
157

a can be arbitrary, not necessarily compliant with the
policy.
In environments with stochastic transitions and re-
wards, an action a performed by the agent in a state
s can result in various pairs (r,s
′
) of the reward value
and the next state; sometimes differing only slightly.
In such a case, the recursive definition of the optimal
action value Q
∗
(s,a), known as the Bellman optimal-
ity equation, takes into account the probabilities (or
densities) of transitions, and is:
Q
∗
(s,a) =
∑
r
∑
s
′
P(r,s
′
|s,a)
r + γ max
a
′
Q
∗
(s
′
,a
′
)
, or
(2)
Q
∗
(s,a) =
ZZ
r,s
′
p(r,s
′
|s,a)
r + γ max
a
′
Q
∗
(s
′
,a
′
)
dr ds
′
.
(3)
In deterministic environments, a fixed (s,a) pair al-
ways produces a specific next pair of (r,s
′
), and the
Bellman equation reduces to:
Q
∗
(s,a) = r(s
′
) + γmax
a
′
Q
∗
(s
′
,a
′
), (4)
where for our purposes we choose to write r(s
′
), un-
derstood as r(s
′
) ≡ r(s,a), to represent the fact that
our deterministic rewards shall be implied by the
reached state s
′
alone.
2.2 Double Q-Learning
In contrast to small grid environments, where Q val-
ues can be updated in lookup tables inductively with-
out special risks, reinforcement learning for larger
problems, based on Q function approximation, re-
quires caution due to potential violations of the ele-
mentary i.i.d. principle of machine learning. It states
that data examples ought to be independent and iden-
tically distributed. There are three elements that may
contribute to the violation of i.i.d.
Firstly, consecutive states along a certain trajec-
tory are obviously not independent, but highly cor-
related. An approach that diminishes this problem
is experience replay (Mnih et al., 2013; Mnih et al.,
2015; Hasselt et al., 2016). It collects the experience
quadruplets — state, action, reward, next state — into
a large buffer, and from time to time triggers the train-
ing based on a random data subsample drawn from
this buffer independently and with repetitions (a boot-
strap batch). This effectively decorelates the data.
Secondly, suppose that
b
Q(s,a;
b
w) denotes our
working model parameterized by weights
b
w. With
this model we would like to approximate Q
∗
(s,a) for
all (s,a), i.e. to have
b
Q(s,a;
b
w) ≈ Q
∗
(s,a). Suppose
also that (s
i
,a
i
,r
i
,s
′
i
) is a single i-th experience drawn
from our buffer. To train
b
Q using this experience, one
needs to prepare a certain target value y
∗
i
for the input
pair (s
i
,a
i
), so that the supervised regression task can
be performed. Mathematically, such a target value is
implied by the right-hand-side of Bellman equation
(4) — the ideal target value. Therefore, it may seem
the task is to minimize the following squared error
b
Q(s
i
,a
i
;
b
w) − (r
i
+ γ max
a
′
Q
∗
(s
′
i
,a
′
)
| {z }
y
∗
i
)
2
(5)
with respect to
b
w. Doing so, e.g. by means of the
stochastic gradient descent, would mean to update
weights e.g. as follows:
b
w :=
b
w − η
b
Q(s
i
,a
i
;
b
w) − (r
i
+γmax
a
′
Q
∗
(s
′
i
,a
′
))
· ∇
b
w
b
Q(s
i
,a
i
;
b
w), (6)
where η ∈ (0,1] stands for a learning rate constant
and ∇
b
w
b
Q(·) for the gradient of our approximator. Yet,
in practice it is impossible to prepare the target y
∗
i
as
shown in (5), because true oracles Q
∗
do not exist and
we simply do not know the value of Q
∗
(s
′
i
,a
′
). . . One
could be tempted to set y
∗
i
:= r
i
+ γmax
a
′
b
Q(s
′
i
,a
′
;
b
w)
instead. But that would mean that the target values
one tries to approximate with model
b
Q are themselves
computed using
b
Q. This phenomenon, known as a
“pursuit of non-stationary target”, may lead to an un-
stable learning process.
The idea behind double Q-learning solves this
problem by introducing the second model, say
e
Q(·;
e
w), that can be regarded as a pseudo-oracle serv-
ing the purpose of providing a stable second summand
for the target values as follows (Hasselt, 2010; Hasselt
et al., 2016; Mnih et al., 2013):
y
∗
i
:= r
i
+ γ max
a
′
e
Q(s
′
i
,a
′
;
e
w). (7)
For neural networks applied as approximators, the
e
Q model is often referred to as the ‘target network’,
while the main operating model
b
Q as the ‘online net-
work’.
Two approaches for updating
e
Q are met in prac-
tice. In the first one,
e
Q stays frozen for a long period
(so that many training steps of
b
Q can take place us-
ing stable targets) and then
e
Q gets replaced by mak-
ing a hard switch of weights:
e
w :=
b
w. In the second
approach,
e
Q is updated slowly, but continuously, to-
wards
b
Q via a moving average, e.g:
e
w := 0.999
e
w +
0.001
b
w. This way or another, the idea with two mod-
els stabilizes significantly the learning process (Fujita
et al., 2021; Kobayashi and Ilboudo, 2021).
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
158

The third element that endangers the i.i.d. is more
subtle. It pertains to the max operator present in (7),
which under the stochastic setting is biased towards
overestimations of future rewards. Both mathematical
and empirical evidence support this claim (Thrun and
Schwartz, 1993; Hasselt, 2010; Hasselt et al., 2016;
Sutton and Barto, 2018). The following simple, yet
elegant, trick circumvents the problem. Noting that
(7) can be equivalently rewritten as
y
∗
i
:= r
i
+ γ
e
Q
s
′
i
, argmax
a
′
e
Q(s
′
i
,a
′
;
e
w);
e
w
, (8)
one prefers instead to use the following estimation of
the target value:
y
∗
i
:= r
i
+ γ
e
Q
s
′
i
, argmax
a
′
b
Q(s
′
i
,a
′
;
b
w);
e
w
. (9)
It means the online model
b
Q is still used to pick
the ‘best’ next action, but the value of that action
is estimated with the target model
e
Q. An apt anal-
ogy to it is a situation where two measurement in-
struments (e.g. scales for measuring weights in kilo-
grams), each biased with a certain stochastic error, are
used to discover a maximum value over a certain col-
lection of objects. Using one instrument to indicate
the ‘argmax’ and the other to indicate the value for
this argument is a practical protection against the sta-
tistical overestimation.
3 RELEVANT WORK
First of all, it should be clearly remarked that our di-
rect research interests are not located in the domain
of AGVs (autonomous ground vehicles) but in rein-
forcement learning itself. We focus on the design of
reward functions in RL problems, where an immedi-
ate reward signal is not present or is extremely sparse
(“needle in a haystack”). Therefore, the simple park-
ing problem should be treated as a toy example serv-
ing that purpose in this research. Readers directly in-
terested in recent advances in the realm of AGVs and
APSs (automatic parking systems) can be addressed
e.g. to two works (Zeng et al., 2019; Cai et al., 2022)
that employ geometric methods and control theory,
or to (Chai et al., 2022; Li et al., 2018) where neu-
ral networks are applied to approximate near-optimal
trajectories; the latter involves also RRTs (Rapidly-
exploring Random Trees).
As regards the general topic of rewards in RL
(without connection to the parking problem), worth
attention is a recent paper due to Sowerby, Zhou and
Littman (Sowerby et al., 2022). It discusses how
reward-design choices impact the learning process
and tries to identify principles of good reward design
that quickly induce target behaviors. Moreover, us-
ing concepts of action gap and subjective discount,
the authors propose a linear programming technique
to find optimal rewards for tabular environments.
As regards works with similarity to ours and per-
taining to both contexts — rewards and RL-based
parking — the following two can be pointed: (Aditya
et al., 2023; Zhang et al., 2019). In (Aditya et al.,
2023), Aditya et al. also employ the double Q-
learning. Their simulated parking lot contains ob-
stacles (other cars parked), but it has a fixed lay-
out and a predefined loop path along which the car
cruises before it finds a free spot. Only then, the ac-
tual RL-based parking maneuvers begin. The reward
function from (Aditya et al., 2023) involves distance
and angle deviation and decays exponentially as those
quantities increase. The authors report 95% success
rate after 24 hours of training (Intel Core i5-1135G7
CPU, IRIS Xe GPU). Unfortunately, no details on
the neural network structure are provided. In (Zhang
et al., 2019), Zhang et al. apply the policy gradient
approach using a two-layer deep network with 100
and 200 ReLU-activated neurons, respectively. Their
hand-crafted reward function contains four pieces of
information: closeness to the slot center, ‘parallelism’
of car and park main axes, penalties for line-pressing
and side deviations. Experiments include scenes with
60
◦
, 45
◦
and 30
◦
initial angles between the car and the
parkplace. The reported results focus on final devia-
tions from the wanted goal position which range from
about 0.37m to 0.48 m sideways and are up to ≈ 1m
lengthwise.
Obviously, due to different environment settings
and the problem itself, it is impossible to fairly
compare our results against the ones from (Aditya
et al., 2023; Zhang et al., 2019). On one hand,
the lack of obstacles is a clear simplification in our
problem variant; on the other, we take into account a
demanding time limit and a broader range of initial
angles and positions (some of them remote) —
hence, an environment that requires more exploration
from the RL perspective and more capable models
to suitably approximate Q values over a richer state
space. We remind that in (Aditya et al., 2023; Zhang
et al., 2019) the actual parking maneuvers start in
the close proximity of the goal. Yet, if despite all
differences the raw numbers were to be compared,
then we can report obtaining 7 models with success
rates exceeding 95% (two of them reaching 99%)
having the final deviations of at most 41 cm for both
axes. Each model was trained for only 10 k episodes
and ≈5 h (all details in Section 7).
Double Q-Learning for a Simple Parking Problem: Propositions of Reward Functions and State Representations
159

We believe an important distinction of our re-
search is that we do not work with a single reward
function with fixed coefficients as it was the case in
(Aditya et al., 2023; Zhang et al., 2019) (a dogmatic
approach). Instead, we work with a parameterized
family of reward functions and discover good propor-
tions between the involved quantities over multiple
experiments.
4 NOTATION, SETTINGS,
PHYSICS
We start this section by providing the link to the
repository of the project associated with this paper:
https://github.com/pklesk/qlparking. It provides access
to source codes, logs for selected models and videos
with parking maneuvers. The implementation has
been done in the Python programming language. All
settings pertaining to physics and car behavior are de-
fined in the script ./src/defs.py.
Our car model for simulations is of length l =
4.405m and width w = 1.818 m. µ
0
= 0.6 and µ
1
=
0.3 denote its coefficients of static and kinetic fric-
tion, respectively. We do not specify the car’s mass,
since we are going to operate only on accelerations
rather than forces (masses not needed). The gravita-
tional acceleration constant is denoted by g and for
computations equal to 9.80665m/s
2
.
The complete information about the car’s position
and orientation is defined by its current center point
⃗x and a unit direction vector
⃗
d (ahead direction at
which the car is looking). Additionally, where use-
ful, we write
⃗
d
R
to denote the unit vector pointing to
the right of the car.
⃗
d becomes
⃗
d
R
after 90
◦
clockwise
rotation. The car’s velocity vector is denoted by ⃗v.
All of the above are planar vectors (with two Carte-
sian coordinates), which means the surface of simu-
lated scenes is treated as flat. Where mathematically
needed, the notation additionally includes a time sub-
script e.g. ⃗x
t
,
⃗
d
t
,⃗v
t
, or is overloaded to writings such
as ⃗x
|s
,
⃗
d
|s
,⃗v
|s
, to be read as ‘in state s’, if we need to
explicitly emphasize the dependence on a state.
As regards the park place, it is of length l
p
=
6.10m and width w
p
= 2.74 m, with position and ori-
entation described, analogically, by vectors ⃗x
p
,
⃗
d
p
,
⃗
d
p,R
, remaining constant in time (the park place does
not move). Therefore, the ideal position for the car
to be parked at is described by the following corner
points:
⃗x
p,FL
=⃗x
p
+ 0.5 l
⃗
d
p
− 0.5 w
⃗
d
p,R
, (front-left)
⃗x
p,FR
=⃗x
p
+ 0.5 l
⃗
d
p
+ 0.5 w
⃗
d
p,R
, (front-right)
⃗x
p,BL
=⃗x
p
− 0.5 l
⃗
d
p
− 0.5 w
⃗
d
p,R
, (back-left)
⃗x
p,BR
=⃗x
p
− 0.5 l
⃗
d
p
+ 0.5 w
⃗
d
p,R
. (back-right).
In accordance with the bang–bang control sce-
nario, we define the set of three magnitudes for the
forward-backward accelerations:
a
−1,·
=−7.0m/s
2
,a
0,·
=0.0m/s
2
,a
+1,·
=+8.0m/s
2
,
(10)
and three magnitudes for the side accelerations (turn-
ing):
a
·,−1
=−1.0m/s
2
,a
·,0
=0.0m/s
2
,a
·,+1
=+1.0m/s
2
.
(11)
Therefore, the following set of 9 possible actions
becomes generated via the Cartesian product of the
above two sets:
A =
n
⃗a
j,k
= a
j,·
⃗
d + a
·,k
⃗
d
R
:
( j, k) ∈ {−1,0,1}×{−1, 0,1}
o
. (12)
More simply, the set of actions can be treated equiva-
lently to 9 symbolic directions {↙,↓, ↘,←, ◦,→,↖
,↑,↗}, meaning: ‘backwards left’, ‘backwards’, . . . ,
‘forwards right’, with the empty action ‘◦’ represent-
ing no acceleration applied.
The time step chosen for simulations was
δt=25 ms. Algorithm 1 presents the basic computa-
tions that take place when the time moment becomes
switched from t to t + δt, performed to update the
car’s velocity, position and direction, based on the ap-
plied acceleration vector ⃗a
t
∈A with static and kinetic
friction taken into account.
4
The chosen δt = 25 ms means that 40 ‘microde-
cisions’ per second could potentially be taken by the
agent. Such a granularity seems a bit too fine for the
parking task. One reason is that the imposed acceler-
ations would change very fast and unrealistically un-
der the bang–bang control. The second is that human
drivers do not take decisions so frequently. There-
fore, to make the agent more human-like, the time
gap between steering steps was defined as ∆t = 4 δt =
100ms. This implies ten decisions per second taken
by the agent.
5
4
To avoid modelling static frictions directed sideways,
a simple condition prevents the vehicle from making in-
stantaneous turns at low velocities (so that it does not
behave like a military tank): if ∥v
t
∥ < 0.75 m/s (see
defs.CAR_MIN_VELOCITY_TO_TURN) then only longitudinal compo-
nents of imposed side components are ignored.
5
see constants: QL_DT = 0.025 and QL_STEERING_GAP_STEPS = 4
in the ./src/main.py
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
160
if ∥⃗v
t
∥ = 0.0 and ∥⃗a
t
∥ > 0.0 then
α
0
:= min{µ
0
g/∥⃗a
t
∥,1.0};
⃗a
t
:= (1.0 − α
0
)⃗a
t
;
end
α
1
:= 0.0;
if ∥⃗v
t
∥ > 0.0 then
∥ ¯v∥ := ∥⃗v
t
+ 0.5⃗a
t
δt∥;
α
1
:= min{µ
1
gδt/∥¯v∥,1.0};
end
⃗x
t+δt
:=⃗x
t
+ (1.0 − α
1
)(⃗v
t
δt + 0.5⃗a
t
δt
2
);
⃗v
t+δt
:= (1.0 − α
1
)(⃗v
t
+⃗a
t
δt);
if ∥⃗v
t+δt
∥ > 0.0 then
⃗
d
t+δt
:= sgn
⟨⃗v
t+δt
,
⃗
d
t
⟩
⃗v
t+δt
/∥⃗v
t+δt
∥;
end
Algorithm 1: Single step of simulation (updates of car
physics.
5 PARAMETERIZED REWARD
FUNCTION
As stated in the motivation, our goal is to propose
such a reward function that shall guide the agent to-
wards better trajectories more quickly while perform-
ing the Q-learning. Apart from −∆t (time consumed
between decision steps) and the remaining distance
∥⃗x −⃗x
p
∥, two more quantities will be taken into ac-
count. Moreover, we want our final function to pre-
serve a consistent physical interpretation of the “neg-
ative time”, and thus be expressible, e.g., in seconds.
First, we define the angular deviation φ(
⃗
d) be-
tween direction vectors of the car and the park place,
based on their inner product:
φ(
⃗
d) = arccos⟨
⃗
d,
⃗
d
p
⟩ ∈[0,π]. (13)
⃗
d
p
, being a constant, is not specified as an explicit
argument of φ.
The car is considered successfully parked if the
following conditions are met:
∥⃗x −⃗x
p
∥ ⩽ 0.15 w
p
and φ(
⃗
d) ⩽ π/16 and ∥⃗v∥ = 0.0.
(14)
The tolerance constants
6
present in (14) imply that the
car’s center can deviate from the park place center by
at most 15% of the place width (≈41 cm) and also that
the angle between the car’s direction and the optimal
direction can deviate by at most 11.25
◦
.
We are now going to define a quantity named the
“gutter distance”. It represents the distance between
the car’s center point and its projection onto the axis
6
defs.CONST_PARKED_MAX_RELATIVE_DISTANCE_DEVIATION = 0.15
defs.CONST_PARKED_MAX_ANGLE_DEVIATION = np.pi / 16
defined by the park place
7
, and can be computed as:
g(⃗x) =
9 ⟨
⃗
d
p,R
,⃗x
p
⟩+⟨
⃗
d
p,R
,⃗x ⟩
∥
⃗
d
p,R
∥
=
⟨
⃗
d
p,R
,⃗x−⃗x
p
⟩
. (15)
Intuitively, the presence of this quantity in the re-
ward should help the learning agent distinguish better
between less and more promising states as regards the
future trajectory needed to complete the task. For ex-
ample, states where the car is quite far from the park
place but approximately on the right track to approach
the target (small “gutter distance”) are more promis-
ing (Fig. 2b) than states where the car is near the park
place but deviated sideways (Fig. 2a). In the latter
case, more maneuvering needs to be invested to com-
plete the task (note distances and
b
Q values reported in
the figure).
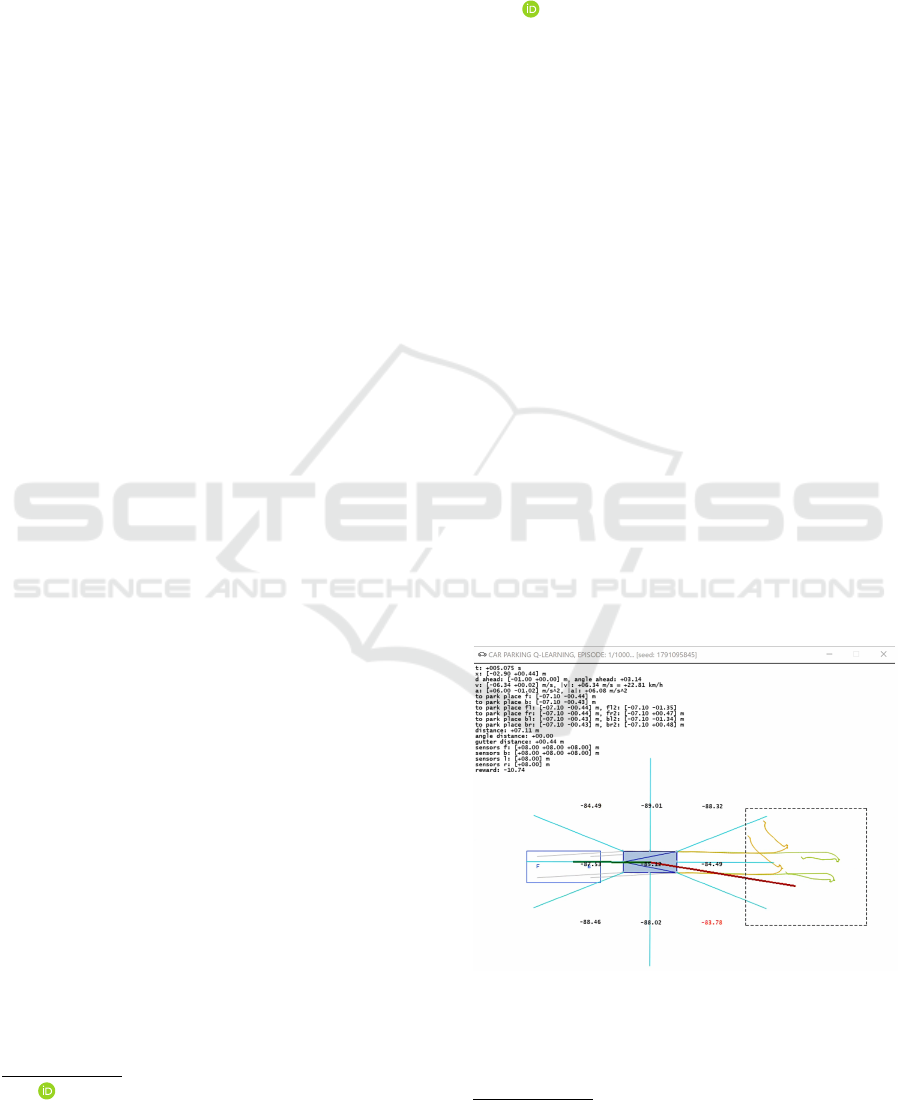
(a) dist. ≈2.49 m, gutter dist. ≈2.38 m, max
a
b
Q(s,a;
b
w)≈ −294.54
(b) dist. ≈16.11 m, gutter dist. ≈0.39 m, max
a
b
Q(s,a;
b
w)≈ −242.57
Figure 2: Comparison of two states: (a) with small straight-
line distance but future trajectory demanding, (b) with large
straight-line distance but future trajectory easy (small gutter
distance).
7
the axis passing through points F (front) and B (back)
Double Q-Learning for a Simple Parking Problem: Propositions of Reward Functions and State Representations
161

Finally, we propose the following parameterized
function that rewards the agent for being in state s
′
(after taking action a in s):
r(s
′
)=
0; if car successfully parked in s
′
,
9
∆t+λ
d
∥⃗x
|s
′
−⃗x
p
∥
|
{z }
distance
+λ
φ
φ(
⃗
d
|s
′
)/π
| {z }
normed
angular deviation
+λ
g
g(⃗x
|s
′
)
|{z}
gutter distance
;
(16)
where parameters λ
d
,λ
φ
,λ
g
⩾ 0 are penalty coeffi-
cients. Figures 3, 4 show example plots of (16) when
⃗x
p
=(0.0,0.0),
⃗
d
p
=(−1.0,0.0).
(λ
d
,λ
φ
,λ
g
) (λ
d
,λ
φ
,λ
g
) (λ
d
,λ
φ
,λ
g
)
= (1.0,1.0, 1.0) = (1.0,2.0, 4.0) = (1.0,4.0, 2.0)
φ = π/8 φ = π/8 φ = π/8
Figure 3: Shapes of reward function (16) for different
penalty coefficients λ
d
,λ
φ
,λ
g
and a fixed angle φ = π/8 .
λ
d
= 1.0,λ
φ
= 16.0,λ
g
= 2.0
φ = 0/4π φ = 1/4π φ = 2/4π φ = 3/4π
41.5
41.5
33.2
-
33.2
16.6
-20 -10 0 10 20
-20
-10
0
10
20
41.5
41.5
-
33.2
33.2
-16.6
-20 -10 0 10 20
-20
-10
0
10
20
41.5
41.5
24.9
-20 -10 0 10 20
-20
-10
0
10
20
41.5
41.5
24.9
-20 -10 0 10 20
-20
-10
0
10
20
Figure 4: Contours of reward function (16) for different
angles φ and penalty coefficients fixed to λ
d
= 1.0, λ
φ
=
16.0,λ
g
= 2.0.
One should note that −∆t summand, rather than
−δt, takes part in (16). This means that for s
t
= s,
the actual reward is collected in state s
′
=s
t+∆t
=s
t+4δt
,
i.e., at the next decision moment, and the intermediate
physical states s
t+δt
, s
t+2δt
, s
t+3δt
are not rewarded.
Though a meaningful interpretation of reward is
not a must in many RL applications, we note that
(16) is interpretable and expressible in time units.
If e.g. λ
d
= 2.0 then the second summand rewritten
equivalently to ∥⃗x
|s
′
−⃗x
p
∥
(1/λ
d
) can be seen as the
ratio: distance / velocity, and interpreted as estimated
future time needed to cover the remaining distance
when traveling on average at velocity 1/λ
d
= 0.5 m/s
while maneuvering. Similarly, the reciprocal 1/λ
g
can be understood as average velocity at which the
agent is able to correct one unit of the gutter distance.
The smaller that velocity is, the higher the importance
of the gutter summand. Deviation φ is a unitless real
number, hence 1/λ
φ
can be seen as an angular veloc-
ity expressed in 1/s units. We decided to norm this
quantity to [0,1] interval (division by π). Thus, the λ
φ
itself can be also interpreted as the time required to
correct the maximum possible deviation of 180
◦
.
6 STATE REPRESENTATIONS
In this section we propose 13 variants of state repre-
sentations for the considered parking problem. The
representations are feature vectors that constitute in-
puts to neural models
b
Q and
e
Q. The nature and in-
formativeness of inputs obviously have a strong im-
pact on the quality of approximations. Yet, without
an experiment it is usually not clear whether particu-
lar pieces of information facilitate or hinder the task.
We take under consideration both the
globally-oriented features that capture a bird’s-eye
view of the environment, and locally-oriented fea-
tures computed relative to the agent. A minimalistic
representation could include: the car’s heading angle
ψ (computed with respect to the global coordinate
system by means of arctan2 function), the signed
magnitude of velocity along that angle, and vectors
⃗
f ,
⃗
b pointing from the car’s front and back central
points, respecitvely, to their counterparts in the park
place (relative features):
⃗
f =⃗x
p
+ 0.5l
⃗
d
p
−
⃗x + 0.5l
⃗
d
,
⃗
b =⃗x
p
− 0.5l
⃗
d
p
−
⃗x − 0.5l
⃗
d
.
Therfore, the minimalistic representation of a state s
can be:
(ψ,±∥⃗v∥,
⃗
f ,
⃗
b)
|s
. (17)
The above compact notation should be understood
as a concatenation of two scalars and two vectors,
thereby yielding a total of 6 real-numbered features.
An equivalent representation but expressed only in
terms of vectors could be:
(
⃗
d,⃗v,
⃗
f ,
⃗
b)
|s
. (18)
It has 8 features with some redundancy, since
⃗
d =
±⃗v/∥⃗v∥.
Instead of
⃗
f ,
⃗
b, one can introduce four vectors
spanning between the corner points of the car and
their ideal target positions (also with redundancy),
namely:
⃗
f
L
=⃗x
p,FL
−⃗x−0.5(l
⃗
d−w
⃗
d
R
),
⃗
f
R
=⃗x
p,FR
−⃗x−0.5(l
⃗
d+w
⃗
d
R
),
⃗
b
L
=⃗x
p,BL
−⃗x+0.5(l
⃗
d+w
⃗
d
R
),
⃗
b
R
=⃗x
p,BR
−⃗x+0.5(l
⃗
d−w
⃗
d
R
). (19)
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
162

Alternatively, the following variation is also possible:
⃗
f
L,2
=⃗x
p,FL
−
⃗x+0.5l
⃗
d
,
⃗
f
R,2
=⃗x
p,FR
−
⃗x+0.5l
⃗
d
,
⃗
b
L,2
=⃗x
p,BL
−
⃗x−0.5l
⃗
d
,
⃗
b
R,2
=⃗x
p,BR
−
⃗x−0.5l
⃗
d
,
(20)
where the vectors point to the corners of the target
position but from the central front and central back
points on the car. We refer to them as ‘2nd-type’ cor-
ner vectors. These vectors provide a useful informa-
tion when the car is in the last phase of parking —
covering final meters along the right track either for-
wards or backwards. One should realize that in such
cases the angles ∠(
⃗
f
L,2
,
⃗
f
R,2
) and ∠(
⃗
b
L,2
,
⃗
b
R,2
) tend
to π i.e. 180
◦
. Note that it is not the case with the
first type of corner vectors. Fig. 5 illustrates different
types of discussed vectors.
Finally, the vector of features may also be ex-
tended with pieces of information that explicitly
take part in the reward function (16), namely:
∥⃗x−⃗x
p
∥,φ(
⃗
d), g(⃗x). Their presence potentially “re-
lieves” the neural model from computing them indi-
rectly (in intermediate layers). Yet again, such a claim
requires experimental confirmation. Table 1 lists all
representations used in experiments.
Table 1: Variants of state representations.
name
state representation
(pieces of information in state s)
# of
features
avms_fb (ψ, ±∥⃗v∥,
⃗
f ,
⃗
b)
|s
6
dv_fb (
⃗
d,⃗v,
⃗
f ,
⃗
b)
|s
8
dv_flfrblbr (
⃗
d,⃗v,
⃗
f
L
,
⃗
f
R
,
⃗
b
L
,
⃗
b
R
)
|s
12
dv_flfrblbr2s (
⃗
d,⃗v,
⃗
f
L
2
,
⃗
f
R
2
,
⃗
b
L
2
,
⃗
b
R
2
)
|s
12
dv_fb_d (
⃗
d,⃗v,
⃗
f ,
⃗
b,∥⃗x−⃗x
p
∥)
|s
9
dv_flfrblbr_d (
⃗
d,⃗v,
⃗
f
L
,
⃗
f
R
,
⃗
b
L
,
⃗
b
R
,∥⃗x−⃗x
p
∥)
|s
13
dv_flfrblbr2s_d (
⃗
d,⃗v,
⃗
f
L
2
,
⃗
f
R
2
,
⃗
b
L
2
,
⃗
b
R
2
,∥⃗x−⃗x
p
∥)
|s
13
dv_fb_da (
⃗
d,⃗v,
⃗
f ,
⃗
b,∥⃗x−⃗x
p
∥,φ(
⃗
d))
|s
10
dv_flfrblbr_da (
⃗
d,⃗v,
⃗
f
L
,
⃗
f
R
,
⃗
b
L
,
⃗
b
R
,∥⃗x−⃗x
p
∥,φ(
⃗
d))
|s
14
dv_flfrblbr2s_da (
⃗
d,⃗v,
⃗
f
L
2
,
⃗
f
R
2
,
⃗
b
L
2
,
⃗
b
R
2
,∥⃗x−⃗x
p
∥,φ(
⃗
d))
|s
14
dv_fb_dag (
⃗
d,⃗v,
⃗
f ,
⃗
b,∥⃗x−⃗x
p
∥,φ(
⃗
d),g(⃗x))
|s
11
dv_flfrblbr_dag (
⃗
d,⃗v,
⃗
f
L
,
⃗
f
R
,
⃗
b
L
,
⃗
b
R
,∥⃗x−⃗x
p
∥,φ(
⃗
d),g(⃗x))
|s
15
dv_flfrblbr2s_dag (
⃗
d,⃗v,
⃗
f
L
2
,
⃗
f
R
2
,
⃗
b
L
2
,
⃗
b
R
2
,∥⃗x−⃗x
p
∥,φ(
⃗
d),g(⃗x))
|s
15
7 MAIN EXPERIMENTS AND
RESULTS
Experimental Setup. To ensure a fair comparison
of different combinations of reward functions and
state representation, in all experiments we performed
a constant number of 10 k episodes (each with the
time limit of 25s to park the car) and we applied the
same structure for neural models. Training scenes
involved a park place with fixed settings of ⃗x
p
=
(−10.0,0.0),
⃗
d
p
= (−1.0,0.0) and random initial po-
sitions of the car drawn from uniform distributions:
⃗x ∼ U ([5.0, 15.0] × [−5.0, 5.0]), ψ ∼ U (
3
4
π,
5
4
π). For
testing, we used 1 k scenes generated by the same dis-
tributions but with different randomization seeds to
verify the generalization ability of obtained models.
Also, for several best models we performed additional
tests where the initial angle was drawn from a broader
distribution: ψ ∼ U(
1
2
π,
3
2
π), hence a range of 180
◦
instead of 90
◦
. Such tests verify the extrapolative gen-
eralization ability of models.
In each episode we collected experience quadru-
plets (s,a, r,s
′
) separated by time gaps of ∆t = 4δt.
At most 250 experiences could have been collected
per episode. Starting from episode 200 onwards, fit-
ting of the online model
b
Q was conducted every 20
episodes. In accordance with experience replay, each
fit was based on a bootstrap sample of 65 536 expe-
riences drawn from the buffer, with target values for
regression computed in compliance with formula (9)
using γ = 0.99. A single fit consisted of 1 epoch of
Adam SGD corrections (Kingma and Ba, 2014) using
minibatches of size 128. Starting from episode 1000
onwards, every 500 episodes we were switching the
target network
e
Q (to become a copy of
b
Q).
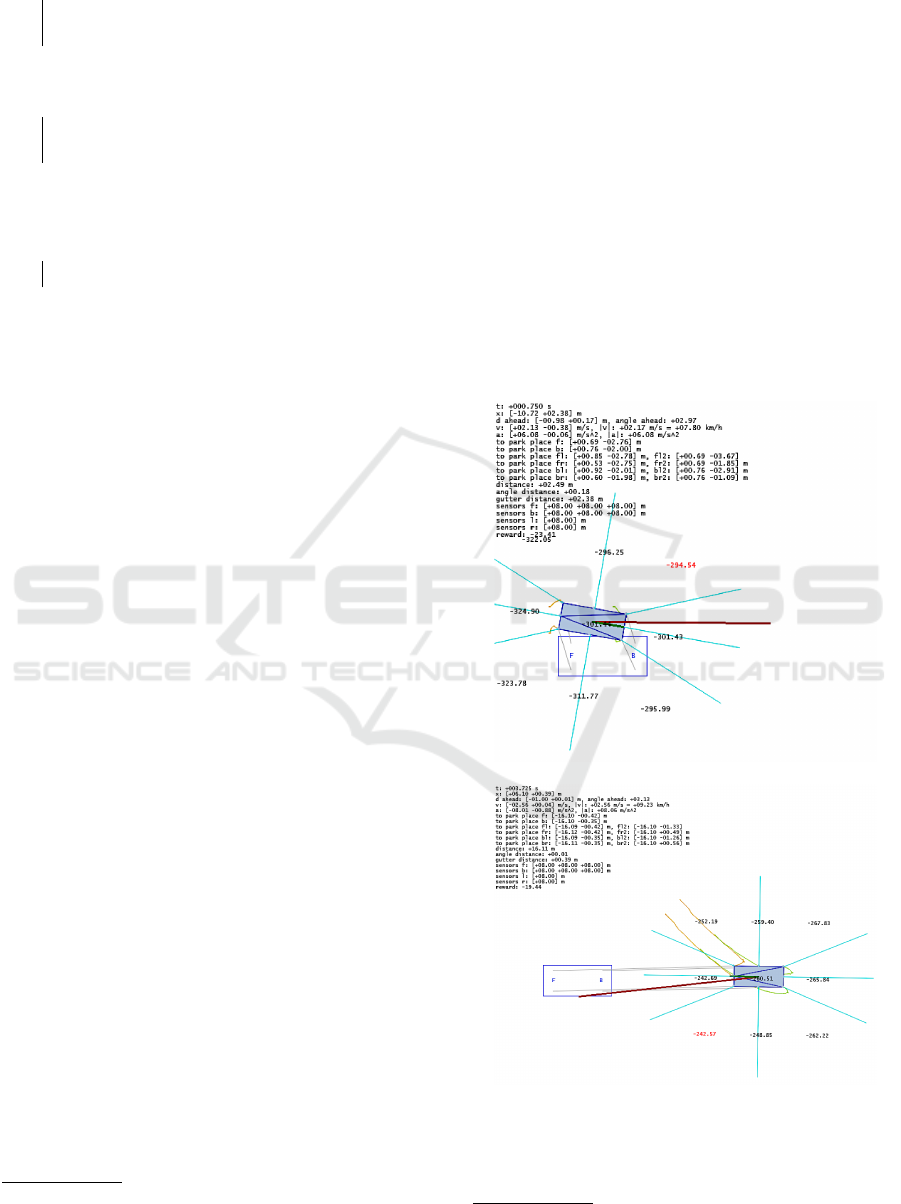
Modular Structure of Neural Models (Approxima-
tors). To remind, a
b
Q or
e
Q model takes as its in-
put a vector of features representing a state and re-
turns as the output a vector of predicted (approxi-
mated) action values, one value per each action in
A. Our Python implementation for such models —
class named qapproximations.QMLPRegressor — works
as a wrapper around a collection of standard MLP net-
works
8
. This means that in our experiments a single
b
Q (or
e
Q) model consisted, in fact, of 9 independent
substructures, or equivalently 9 subnetworks, that
did not share weights; see Fig. 6. Each substructure
corresponded to one action in A and was fit based on
experiences related to that action only. Hence, within
calls of fit(X, y, actions_taken) method, the mentioned
bootstrap samples containing 65536 examples were
being partitioned into 9 disjoint subsets (based on the
information from the last argument actions_taken), and
those subsets were still further partitioned into mini-
batches to perform an epoch of Adam algorithm.
We remark that in RL applications this kind of
modular structure for function approximators, some-
times called multi-head structure, is not new (Chen
et al., 2021; Mankowitz et al., 2018; Goyal et al.,
2019), but definitely less popular than the one with
shared hidden layers and weights (most of DQNs and
DDQNs (Mnih et al., 2013; Mnih et al., 2015; Has-
selt et al., 2016)). However, in our opinion, the popu-
8
sklearn.neural_network.MLPRegressor (Pedregosa et al., 2011)
Double Q-Learning for a Simple Parking Problem: Propositions of Reward Functions and State Representations
163
(a):
⃗
f ,
⃗
b (b):
⃗
f
L
,
⃗
f
R
,
⃗
b
L
,
⃗
b
R
(c):
⃗
f
L
2
,
⃗
f
R
2
,
⃗
b
L
2
,
⃗
b
R
2
Figure 5: Vectors (black segments) between key points on the car and the park place.
INPUT: state representation
7→
b
Q(s,↙;
b
w)
7→
b
Q(s,↓;
b
w)
s
.
.
.
.
.
.
.
.
.
7→
b
Q(s,↗;
b
w)
OUTPUT: predicted action values
Figure 6: Modular structure of the neural network representing the
b
Q model with 14 inputs (state representation) and consisting
of 9 independent substructures, one per each action.
lar structure has certain drawbacks related both to the
principles of machine learning and to convergence.
The most important one is the ambiguity on how to
prepare those entries of target vectors that are associ-
ated with non-taken actions. Note that only the taken
action entry is well-defined by the Bellman equation,
e.g. (9).
For the main experiments presented in this sec-
tion, we employed networks in which the mentioned
substructures consisted of 4 hidden dense layers,
each, with the following sizes — counts of neu-
rons: (256,128,64, 32), and with ReLU activations
(Nair and Hinton, 2010), as shown in Fig. 6. In the
output layer, the single neurons returning the pre-
dicted action values worked as linear combinations
of signals from the last hidden layer, i.e. without
any non-linear activation. This overall architecture
comprised the total of approximately
9
0.4 M network
parameters (weights). In the case of additional ex-
periments that we discuss in Section 8, we applied
larger networks with doubled sizes of hidden layers
(≈ 1.6 M weights).
Agent Behavior. The agent was picking actions ac-
cording to the ε-greedy approach, with the explo-
ration rate ε (probability of random action) drop-
ping linearly from 0.5 to 0.1 over all 10 k episodes.
After each 250 episodes, the subsquent episode
was presented as a video (Shinners, 2011), in
which the agent was taking only the greedy actions:
9
Number of weights varied slightly due to different state
representations, and hence different numbers of input sig-
nals.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
164
argmax
a∈A
b
Q(s,a;
b
w). Apart from that, we imple-
mented an additional mechanism in agent’s behavior
named anti-stuck nudge. It plays a small but impor-
tant role both while learning and testing, and makes
the agent apply a forward or backward acceleration
(random fifty-fity choice) if within the last 3 seconds
the car’s position stayed within a radius of 25 cm —
car stucked (see constants in the footnote
10
). This
mechanism counteracts a phenomenon of small local
undulations (tiny waves) present in the approximation
surface generated by the
b
Q model. Such undulations
may lead to oscillations in agent’s policy.
Main Results. We remark that all experiments can
be reproduced by the main script ./src/main.py, avail-
able in the repository. In the script, the simulation
and learning-related constants are prefixed by a QL_
string (e.g.: QL_RANDOM_SEED = 0, QL_DT = 0.25,
QL_GAMMA = 0.99, etc.). Based on those constants and
the car-related settings in ./src/defs.py, we have calcu-
lated 10-digit hashcodes to identify experiments. In
folder ./models_zipped one can find learning and test-
ing logs, and the models themselves (saved in both
binary or .json formats).
Table 2 gathers the main results. Columns 5 and 6
describe the quality of learning in terms of the final (at
episode no. 10 k) frequency of the ‘parked’ event and
its exponential moving average (EMA
11
). Obviously,
the most important measure is the success frequency
at the test stage, provided in the right-most column.
We have distinguished there experiments where that
frequency achieved at least: 50% (green color), 80%
(light red) and 95% (dark red).
We have experimented with different settings of
penalty coefficients (λ
d
,λ
φ
,λ
g
) of the reward func-
tion. The initial setting of (1,0,0), representing re-
wards based solely on the straight-line distance, led to
the worst agents. The subsequent settings of (1,1,0)
and (1,1, 1) indicated some improvement. From then
onwards, we experimented with various proportions
by doubling and quadrupling the penalty coefficients
(λ
d
=1 kept constant for reference). We should re-
mark that a single experiment lasted about 5h on
our computational environment
12
, hence, an exhaus-
tive search was not possible. The proportions discov-
10
QL_ANTISTUCK_NUDGE = True, QL_ANTISTUCK_NUDGE_STEERING
_STEPS = 2, defs.CAR_ANTISTUCK_CHECK_RADIUS = 0.25, defs.CAR
_ANTISTUCK_CHECK_SECONDS_BACK = 3.0
11
informing about the recent tendency in the frequency
of successful parking attempts
12
Hardware: Intel(R) Xeon(R) CPU E3-1505M v5 @
2.80GHz, 63.9 GB RAM, Quadro M4000M GPU. Soft-
ware: Windows 10, Python 3.9.7 [MSC v.1916 64 bit
(AMD64)], numpy 1.22.3, numba 0.57.0, sklearn 1.0.2.
ered in experiments 25–36, namely: (λ
d
,λ
φ
,λ
g
) =
(1,32,8), translated onto the best test results ob-
served.
As for state representations, the minimalistic one
avms_fb (involving the heading angle) turned out to
work the worst. Vector-based representations with
redundancy appeared to be better suited for neural
approximations. It is difficult to point out a clear
winner, but based on experiments 25–36, represen-
tations dv_fb, dv_flfrblbr2s_da and dv_flfrblbr2s_dag and
seem to be the best candidates. Those three repre-
sentations, combined with the (λ
d
,λ
φ
,λ
g
) = (1,32,8)
coefficients, produced the best performing models,
achieving high success rates at the test stage: 99.0%,
98.9% and 99.8%, respectively.
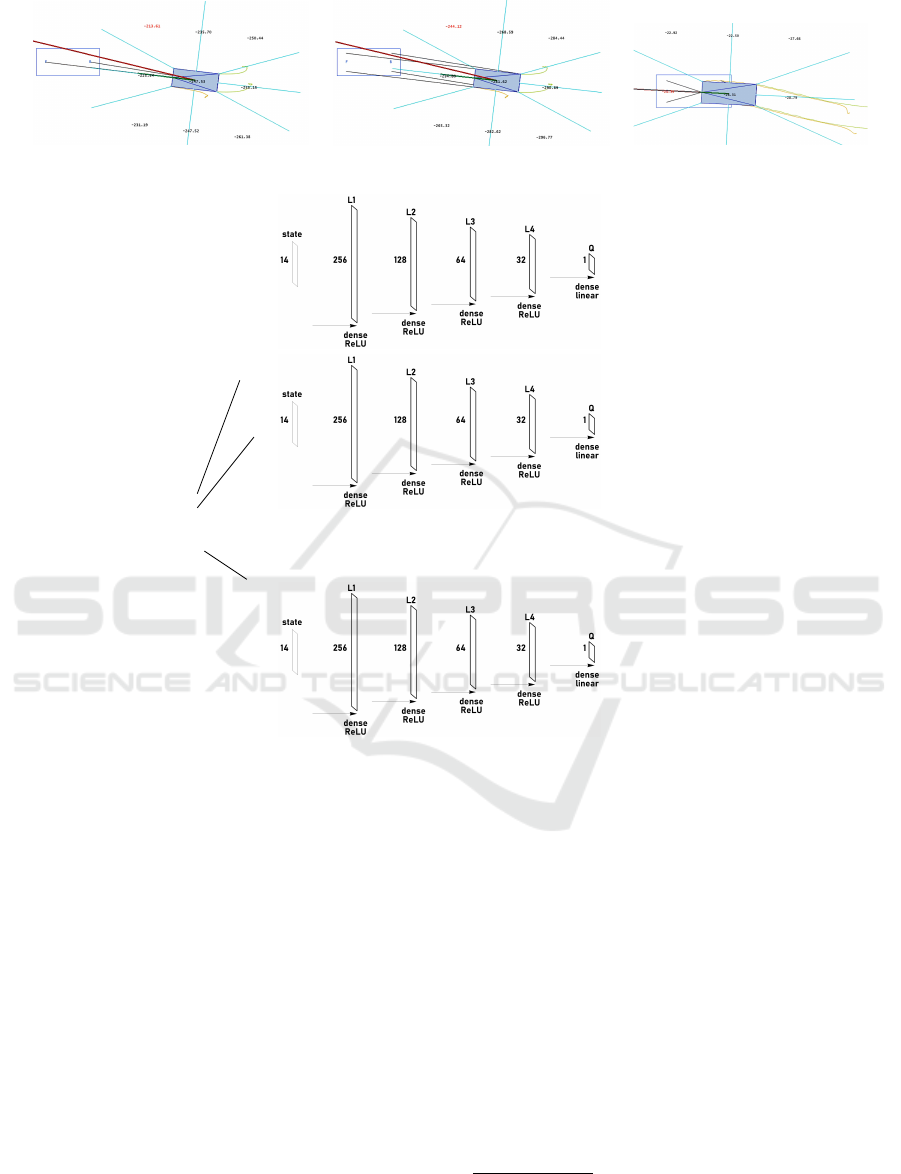
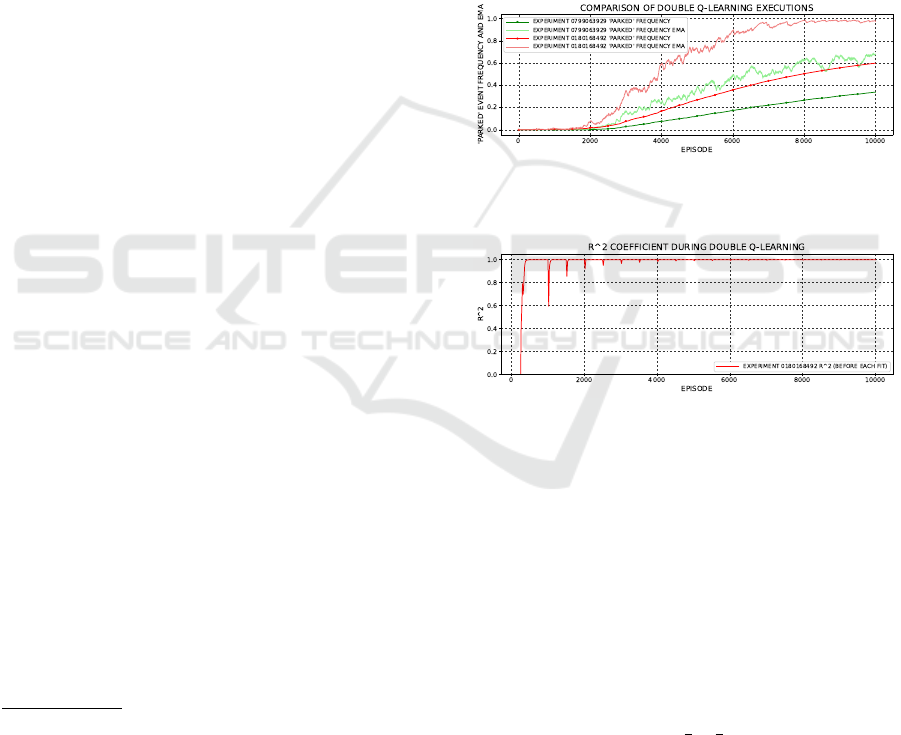
Figure 7: Comparison of two executions of double Q-
learning — experiments: 0799063929 vs. 0180168492.
Figure 8: Regression score R
2
(coefficient of determina-
tion) for the
b
Q model from experiment 0180168492, plotted
along double Q-learning.
Figures 7, 8 provide example plots of: ‘parked’
event frequency, its EMA, and R
2
regression score
along the progress of double Q-learning for selected
experiments. The characteristic peaks present in
Fig. 8 indicate the moments where the target model
e
Q was switched.
Table 3 reports the aforementioned test results on
extrapolative generalization. Based on the table, one
can see how frequently the best models were able to
park successfully starting from a broader range (180
◦
)
of random angles, ψ ∼ U (
1
2
π,
3
2
π).
Finally, in Fig. 9 we demonstrate several selected
trajectories obtained by the best model (0180168492)
during: the learning stage and the two testing stages.
We also encourage the reader to see the related sample
videos available in the repository by clicking on the
presented images (README.md).
Double Q-Learning for a Simple Parking Problem: Propositions of Reward Functions and State Representations
165
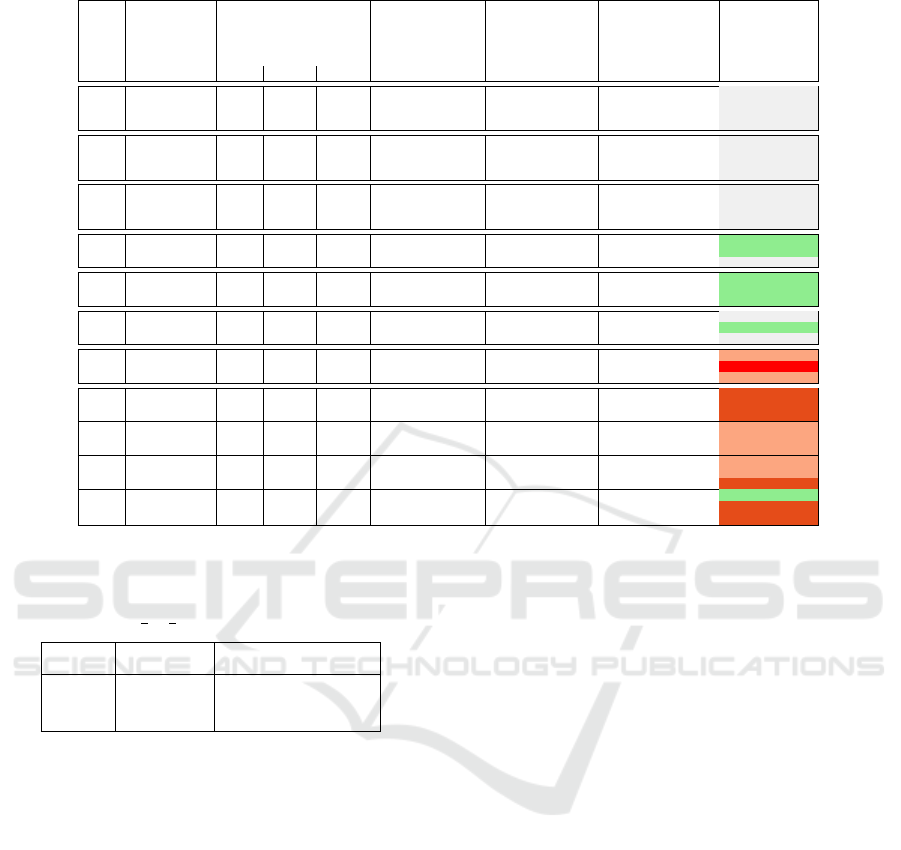
Table 2: Results of parking experiments (double Q-learning and testing).
no.
experiment
hash code
reward
parameters
state
representation
final frequency
of ‘parked’
event at
learning stage
final EMA
of ‘parked’
event frequency
at learning stage
frequency of
‘parked’
event at
test stage
λ
d
λ
φ
λ
g
1 0378634304 1.0 0.0 0.0 avms_fb 2.04% 1.30% 0.8%
2 1228517047 1.0 0.0 0.0 dv_fb 6.03% 14.68% 10.7%
3 3783388807 1.0 0.0 0.0 dv_flfrblbr 5.46% 18.34% 6.6%
4 3223156582 1.0 0.0 0.0 dv_flfrblbr2s 4.65% 15.24% 9.5%
5 1712051871 1.0 1.0 0.0 avms_fb 3.52% 6.00% 7.9%
6 2561934614 1.0 1.0 0.0 dv_fb 7.20% 15.31% 3.4%
7 0821839078 1.0 1.0 0.0 dv_flfrblbr 6.87% 19.87% 14.6%
8 0261606853 1.0 1.0 0.0 dv_flfrblbr2s 7.50% 20.92% 25.9%
9 3085463456 1.0 1.0 1.0 avms_fb 3.49% 10.07% 5.6%
10 3935346199 1.0 1.0 1.0 dv_fb 15.55% 45.24% 34.5%
11 2195250663 1.0 1.0 1.0 dv_flfrblbr 10.11% 24.66% 13.5%
12 1635018438 1.0 1.0 1.0 dv_flfrblbr2s 12.63% 30.23% 33.1%
13 0799063929 1.0 2.0 4.0 dv_fb 33.86% 67.76% 65.1%
14 3353935689 1.0 2.0 4.0 dv_flfrblbr 18.20% 37.67% 61.7%
15 2793703464 1.0 2.0 4.0 dv_flfrblbr2s 21.00% 39.74% 25.3%
16 3390133950 1.0 8.0 16.0 dv_fb 25.44% 46.08% 52.7%
17 0986779886 1.0 8.0 16.0 dv_flfrblbr 19.20% 54.06% 71.1%
18 0799450095 1.0 8.0 16.0 dv_flfrblbr2s 24.39% 46.27% 57.2%
19 0719075893 1.0 4.0 2.0 dv_fb 25.64% 56.98% 43.0%
20 3273947653 1.0 4.0 2.0 dv_flfrblbr 24.21% 52.50% 57.8%
21 2713715428 1.0 4.0 2.0 dv_flfrblbr2s 21.55% 51.01% 46.6%
22 3468419818 1.0 16.0 8.0 dv_fb 52.55% 89.12% 87.3%
23 1065065754 1.0 16.0 8.0 dv_flfrblbr 60.95% 91.31% 95.6%
24 0877735963 1.0 16.0 8.0 dv_flfrblbr2s 43.07% 81.47% 92.6%
25 3497227376 1.0 32.0 8.0 dv_fb 60.64% 98.39% 99.0%
26 1093873312 1.0 32.0 8.0 dv_flfrblbr 55.95% 95.68% 97.8%
27 0906543521 1.0 32.0 8.0 dv_flfrblbr2s 52.75% 96.37% 96.6%
28 2686104021 1.0 32.0 8.0 dv_fb_d 49.05% 93.32% 80.2%
29 3755253765 1.0 32.0 8.0 dv_flfrblbr_d 58.14% 94.19% 88.6%
30 4119951046 1.0 32.0 8.0 dv_flfrblbr2s_d 57.66% 96.22% 94.8%
31 2849328398 1.0 32.0 8.0 dv_fb_da 43.98% 88.94% 94.6%
32 1633232094 1.0 32.0 8.0 dv_flfrblbr_da 56.02% 95.71% 94.2%
33 0053945917 1.0 32.0 8.0 dv_flfrblbr2s_da 61.35% 97.80% 98.9%
34 0937679483 1.0 32.0 8.0 dv_fb_dag 32.05% 72.47% 74.6%
35 1893399723 1.0 32.0 8.0 dv_flfrblbr_dag 59.87% 91.10% 96.7%
36 0180168492 1.0 32.0 8.0 dv_flfrblbr2s_dag 59.92% 97.39% 99.8%
Table 3: Extrapolative generalization: results of best mod-
els from Table 2 on a broader range (180
◦
) of initial random
angles, i.e. ψ ∼ U(
1
2
π,
3
2
π).
experiment
hash code
state
representation
frequency of ‘parked’ event
at 2nd test stage
1893399723 dv_flfrblbr_dag 91.8%
1093873312 dv_flfrblbr 94.5%
0053945917 dv_flfrblbr2s_da 87.3%
3497227376 dv_fb 96.8%
0180168492 dv_flfrblbr2s_dag 89.9%
8 ADDITIONAL EXPERIMENTS
Arbitrary Initial Positions and Angles. Having
discovered the best performing combination of: re-
ward coefficients (λ
d
,λ
φ
,λ
g
) = (1, 32,8) and state
representation dv_flfrblbr2s_dag from the set of main
experiments (previous section), we performed addi-
tional experiments with more general scenes.
In the first additional setup the park place was
fixed in the middle of the scene, directed to the west:
⃗x
p
= (0.0,0.0),
⃗
d
p
= (−1.0,0.0); but the car’s ini-
tial position was entirely random within the region of
20 m × 20 m and with any heading angle within 360
◦
,
namely:
⃗x ∼ U ([−10.0,10.0] × [−10.0, 10.0]),
ψ ∼ U (0, 2π).
For reference, we preserved 10 k learning episodes,
but since the scenes became more general we
employed neural networks of larger internal ca-
pacity. The sizes of hidden layers in each
action-related substructure were doubled to become:
(512,256,128, 64). This translated onto approxi-
mately four times more network weights than before,
i.e. ≈ 1.6 M (because of dense layers). Also, we have
enlarged the batch samples in the experience replay
to the size 4 · 65 536 = 262 144. In consequence, the
time of one full experiment with 10 k episodes also
increased about four times, becoming ≈ 22 h.
The resulting model (0623865367) that we ob-
tained was able to perform complicated and very in-
teresting maneuvers, including e.g.: hairpin turns,
rosette-shaped turns, and zigzag patterns. Some of
its trajectories are illustrated in Fig. 10, for videos we
again address the reader to the repository. The suc-
cess rate for this model at test stage was 97.8% (over
1 k attempts with 25 s time limit).
Model Transfer to Rotation-Invariant State Rep-
resentation. Our second additional experiment
aimed to check if model 0623865367, described
in the previous paragraph, can be transferred to a
rotation-invariant state representation and perform
well without training on new testing scenes where not
only the car’s but also the park place’s position and
angle are arbitrary (within 20 m×20 m). More pre-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
166
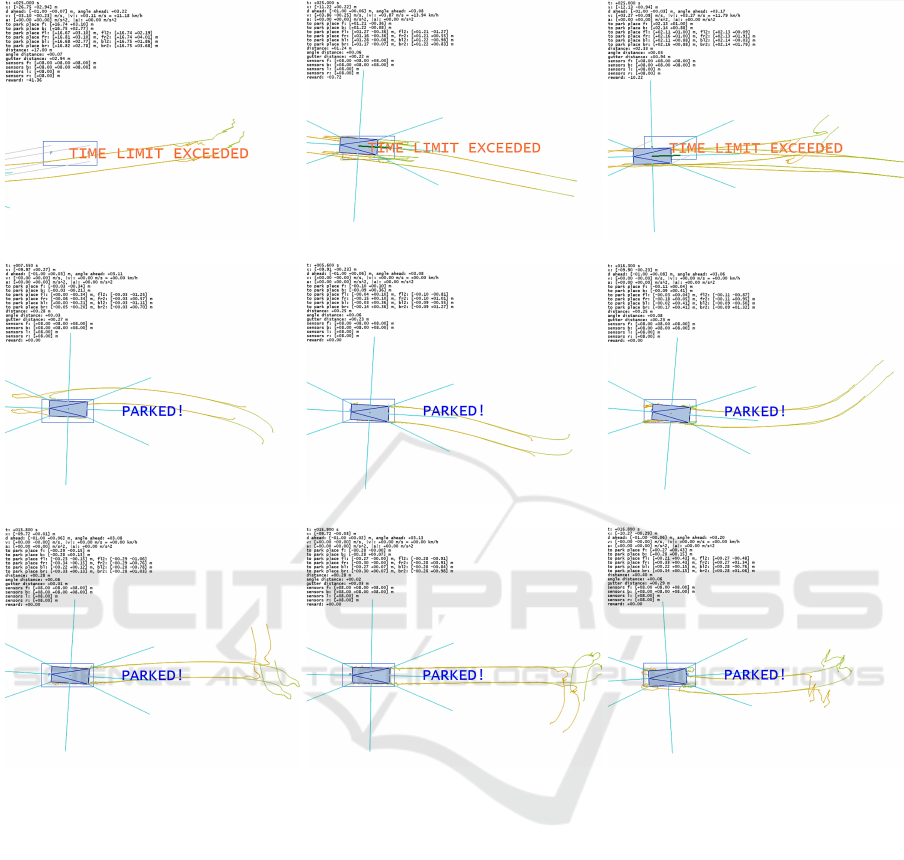
example trajectories while learning (up to episode no. 3000):
standard generalization tests (90
◦
range for initial random angles):
extrapolative generalization tests (180
◦
range for initial random angles):
Figure 9: Example trajectories at learning and testing stages (model: 0180168492).
cisely, we used the following distributions:
⃗x ∼ U ([−10.0,10.0] × [−10.0, 10.0]),
ψ ∼ U (0, 2π),
⃗x
p
∼ U([−10.0,10.0] × [−10.0,10.0]),
ψ
p
∼ U(0,2π).
The rotation-invariant state representation, called
dv_flfrblbr2s_dag_invariant, can be introduced by finding
the park place rotation angle as
β = arctan2(−
⃗
d
p
) (21)
and then multiplying the vector components of
dv_flfrblbr2s_dag representation by a suitable rotation
matrix at every simulation step, as shown below.
state representation
dv_flfrblbr2s_dag_invariant:
M ·
⃗
d, M ·⃗v,M ·
⃗
f
L
2
,M ·
⃗
f
R
2
,M ·
⃗
b
L
2
,M ·
⃗
b
R
2
,
∥⃗x−⃗x
p
∥,φ(
⃗
d), g(⃗x)
|s
, (22)
where
M =
cosβ −sinβ
sinβ cosβ
(23)
is the rotation matrix.
Tests carried out for the transferred model on 1 k
scenes (log file 1168277942_t.log in the repository) re-
vealed the correct and again interesting behavior of
the agent. Selected examples of maneuvering trajec-
tories are illustrated in Fig. 12. The success rate we
obtained was 94.5% — slightly lower than in the pre-
vious case, but we believe still satisfactory taking into
Double Q-Learning for a Simple Parking Problem: Propositions of Reward Functions and State Representations
167
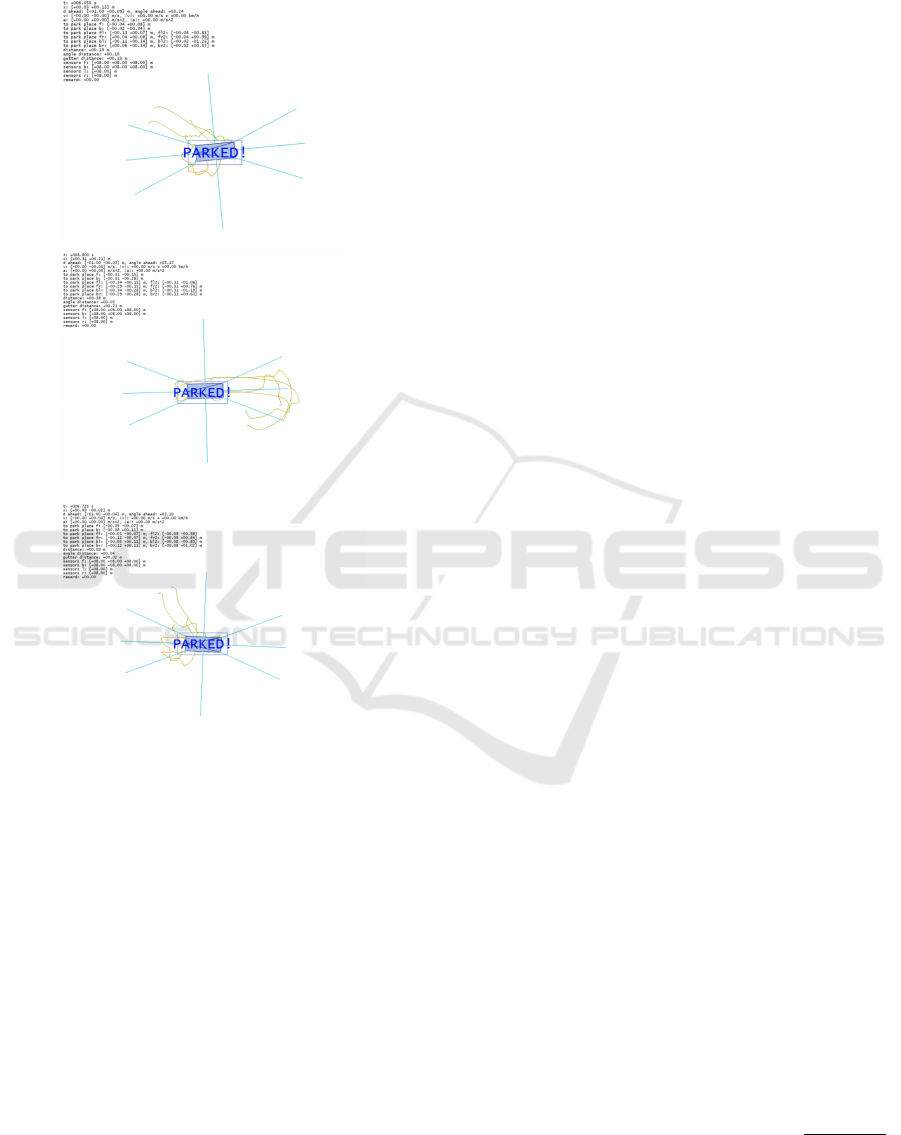
park place fixed in middle,
arbitrary car position within 20 m×20 m
and arbitrary angle within 360
◦
:
Figure 10: Example trajectories at test stage obtained by
the model trained on scenes with arbitrary initial car posi-
tion within 20 m×20 m and angle within 360
◦
(experiment
no. 0623865367).
account the facts that the model was not trained (just
transferred) and that it was submitted to new scenes,
not experienced before, with arbitrary park place ro-
tations and positions.
Obstacles and Sensors — Preliminary Attempts.
It is natural to ask whether the proposed reward func-
tion (16) could be applicable for scenes with obsta-
cles present. A complete answer to such a question
requires a thorough analysis and more experiments,
and we plan those to be our future research direc-
tion. Nevertheless, in this paragraph we report our
very first, preliminary attempts on this problem.
We are going to consider a scene with two obsta-
cles located sideways with respect to the target park
place — a common real-life situation where other cars
are parked in the adjacent spots. We are aware that
other arrangements of obstacles (e.g. front and rear
obstacles) might affect the results, especially having
the gutter distance in mind.
In the experiments to follow, the rotation-invariant
state representation was extended with 8 or 12 read-
ings from virtual sensors, represented graphically by
the blue beams around the car in figures, compris-
ing the total of 23 or 27 features (representation:
dv_flfrblbr2s_dag_invariant_sensors). Each sensor indi-
cates the distance to the closest obstacle along its di-
rection. The maximum reading of 8.0 m indicates no
obstacle seen within that distance.
To have a referential view on the applicabil-
ity of reward function (16), we have preserved
(λ
d
,λ
φ
,λ
g
) = (1, 32,8) — the best coefficients ob-
served in former experiments. Yet, in the presence
of obstacles there is now one new element that must
be considered, i.e. a reward for collision (in fact, a
penalty). Let us denote it by r
c
constant. Therefore,
the new reward function is of the following form with
three cases:
r(s
′
)=
0; if car successfully parked in s
′
,
r
c
; if car collided in s
′
,
9
∆t+λ
d
∥⃗x
|s
′
−⃗x
p
∥+ λ
φ
φ(
⃗
d
|s
′
)/π+ λ
g
g(⃗x
|s
′
)
.
(24)
It is difficult to say in advance what is a good choice
for the value of r
c
. For the purpose of preliminary
experiments described here, we picked r
c
to be equal
to −10
2
. This choice can be treated as a guess. In
fact, it is plausible that r
c
should somehow depend
on (λ
d
,λ
φ
,λ
g
). Note also that for any fixed choice
of r
c
there shall always exist some states s
′
, suitably
deviated from the ideal target position, such that
9
∆t+λ
d
∥⃗x
|s
′
−⃗x
p
∥+ λ
φ
φ(
⃗
d
|s
′
)/π+ λ
g
g(⃗x
|s
′
)
< r
c
,
which implies collisions not to be the worst possible
states. Obviously, in real life one prefers not to park
than to collide.
One more mathematical detail that needs to be
discussed. It pertains to collisions and the context
of episodic tasks. Suppose r
1
,.. ., r
T
is a sequence
of rewards — realizations of R
1
,.. ., R
T
random vari-
ables, and T stands for the last time index. In our
case T = 25s/∆t = 25s/(4δt) = 250. Suppose also,
a collision takes place at time index T
c
. Then the dis-
counted return the agent collects ought to be calcu-
lated as:
T
0
−1
∑
t=1
γ
t−1
r
t
+
T
∑
t=T
0
γ
t−1
r
c
=
T
0
−1
∑
t=1
γ
t−1
r
t
+ r
c
γ
T
0
−1
− γ
T
1 − γ
.
(25)
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
168
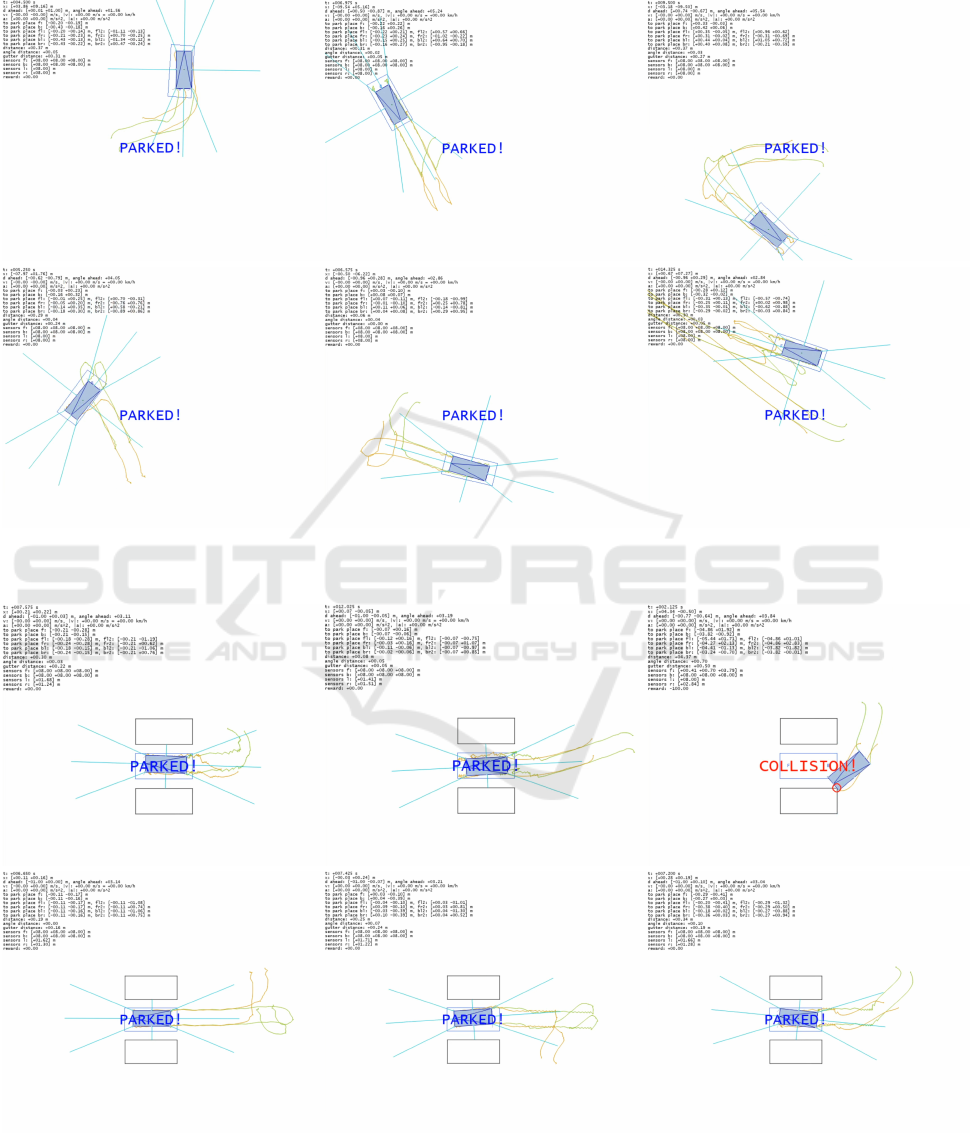
model transfer using rotation-invariant state representation,
arbitrary position and angle for both car and park place (within 20 m×20 m):
Figure 11: Example trajectories obtained at tests by model 0623865367 transferred to new scenes using rotation-invariant
state representation dv_flfrblbr2s_dag_invariant.
park place fixed in middle with 2 obstacles 1 m sideways (model 2914586007)
Figure 12: Example trajectories obtained at tests by model 2914586007 for a scene involving 2 obstacles located 1 m to the
sides of the park place.
Double Q-Learning for a Simple Parking Problem: Propositions of Reward Functions and State Representations
169

It means that although a simulation as such stops at
the collision moment, the agent keeps on receiving
constant negative rewards for collision until the end
of episode. Note that this is consistent with the zero-
valued reward for successful parking which cancels
the tail of discounted rewards in a similar manner.
In the context of double Q-learning computations and
the formula (9) for the target regression values:
y
∗
i
:= r
i
+ γ
e
Q
s
′
i
, argmax
a
′
b
Q(s
′
i
,a
′
;
b
w);
e
w
,
the proper handling of the future returns for terminal
states can be achieved simply by replacing the
e
Q(·)
response as follows
y
∗
i
:= r
i
+ γ · 0, (26)
y
∗
i
:= r
i
+ γ · r
c
, (27)
for the successfully parked car and the collided car,
respectively.
We now move on to the details of this addi-
tional experiment. The park place was located at
⃗x
p
= (0.0,0.0) and directed along
⃗
d
p
= (−1.0,0.0).
Two obstacles were adjacent sideways to it, each 1 m
away from the park place border. Random distri-
butions for the initial car position and angle were:
⃗x ∼ U([5.0,15.0] × [−5.0, 5.0]), ψ ∼ U(
1
2
π,
3
2
π) —
i.e. a range of 180
◦
. In experiments involving 8 sen-
sors, their layout was (3, 3, 1): 3 in front, 3 in the
back, 1 at each side. In experiments involving 12 sen-
sors, their layout was (3, 3, 3).
Table 4: Results of preliminary experiments on
parking with obstacles. Reward function coeffi-
cients: (λ
d
,λ
φ
,λ
g
) = (1,32,8), state representation:
dv_flfrblbr2s_dag_invariant_sensors, batch size for
experience replay: 262k.
no.
experiment
hash code sensors
final frequency
of ‘parked’
event at
learning stage
final EMA
of ‘parked’
event frequency
at learning stage
frequency of
‘parked’
event at
test stage
episodes: 10k, NN: 9 × (256,128, 64, 32)
1 0809626551 (3, 3, 1) 32.29% 60.54% 42.3%
2 0501599417 (3, 3, 3) 39.60% 68.66% 57.8%
episodes: 20k, NN: 9 × (256,128, 64, 32)
3 2914586007 (3, 3, 1) 63.72% 73.59% 80.6%
4 2606558873 (3, 3, 3) 35.33% 40.71% 69.4%
episodes: 10k, NN: 9 × (512,256, 128, 64)
5 0726961302 (3, 3, 1) 21.70% 48.25% 56.4%
6 4063022036 (3, 3, 3) 16.18% 35.23% 41.0%
episodes: 20k, NN: 9 × (512,256, 128, 64)
7 2831920758 (3, 3, 1) 38.41% 56.85% 62.0%
8 1873014196 (3, 3, 3) 41.19% 59.48% 70.4%
Table 4 summarizes the results obtained in this
preliminary experiment (example trajectories shown
in Fig. 12). Overall, the results are not satisfactory but
also not too pessimistic. Six out of 8 models managed
to perform more than 50% successful parking ma-
neuvers at the test stage in the presence of obstacles.
The best observed model (2914586007) achieved the
success rate of 80.6%. The troubling aspect is that
no clear tendencies can be seen in the results, which
makes them difficult to understand. All the tested
settings (smaller / larger NNs, fewer / more sensors,
fewer / more training epsiodes) seem not to have a
clear impact on final rates. Therefore, as mentioned
before, the general problem setting — parking with
obstacles — is planned as our future research direc-
tion.
9 CONCLUSIONS AND FUTURE
RESEARCH
Within the framework of reinforcement learning, we
have studied a simplified variant of the parking prob-
lem (no obstacles present, but time regime imposed).
Learning agents were trained to park by means of
the double Q-learning algorithm and neural networks
serving as function approximators. In this context,
our main points of attention pertained to: reward
functions (parameterized) and state representations
relevant for this problem.
We have demonstrated that suitable proportions of
penalty terms in the reward function, coupled with in-
formative state representations, can translate onto ac-
curate neural approximations of long-term action val-
ues, and thereby onto an efficient double Q-learning
procedure for a car parking agent. Using barely 10 k
training episodes we managed to obtain high success
rates at the testing stage. In the main set of exper-
iments (Section 7) that rate was exceeding 95% for
several models, reaching 99% and 99.8% for two
cases.
In the additional set of experiments (Section 8) we
showed that using larger capacities of neural models
the agent was able to learn performing well in more
general scenes involving arbitrary initial positions and
rotations of both the park place and the car. In par-
ticular, the agent learned to perform complicated and
interesting maneuvers such as hairpin turns, rosette-
shaped turns, or zigzag patterns without supervision
— i.e. with being explicitly instructed about trajecto-
ries of such maneuvers.
Our future research shall pertain to a general park-
ing problem with obstacles present in the scenes and
sensor information included in state representation
(with time regime preserved). Preliminary results for
such a problem setting (Section 8) indicate the need
for more experiments and analysis. Also, it seems
appropriate to conduct in our future work a compar-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
170

ative evaluation of parking agents using such frame-
works as, for example, Farama
13
or a more general
MuJoCo
14
.
REFERENCES
Aditya, M. et al. (2023). Automated Valet Parking using
Double Deep Q Learning. In ICAECIS 2023, pages
259–264.
Cai, L. et al. (2022). Multi-maneuver vertical parking path
planning and control in a narrow space. Robotics and
Autonomous Systems, 149:103964.
Chai, R. et al. (2022). Deep Learning-Based Trajectory
Planning and Control for Autonomous Ground Vehi-
cle Parking Maneuver. IEEE Transactions on Automa-
tion and Science Engineering, 20:1633–1647.
Chen, X. et al. (2021). Independent Q-learning for Robust
Decision-Making under Uncertainty. In Proceedings
of the AAAI Conference on Artificial Intelligence, vol-
ume 35, pages 11598–11606.
Fujita, Y. et al. (2021). ChainerRL: A Deep Reinforcement
Learning Library. Journal of Machine Learning Re-
search, 22(77):1–14.
Goyal, A. et al. (2019). Modular deep reinforcement learn-
ing with functionally homogeneous modules. In Ad-
vances in Neural Information Processing Systems,
volume 32, pages 12449–12458.
Hasselt, H. (2010). Double Q-learning. In Advances in
Neural Information Processing Systems, volume 23.
Curran Associates, Inc.
Hasselt, H., van, Guez, A., and Silver, D. (2016). Deep
Reinforcement Learning with Double Q-Learning. In
Proc. of 30th AAAI Conf. on AI, pages 2094–2100.
Kingma, D. and Ba, J. (2014). Adam: A Method for
Stochastic Optimization. In ICLR (Poster). https:
//arxiv.org/pdf/1412.6980.pdf.
Kobayashi, T. and Ilboudo, W. (2021). t-soft update of tar-
get network for deep reinforcement learning. Neural
Networks, 136:63–71.
Li, Y. et al. (2018). Neural Network Approximation Based
Near-Optimal Motion Planning with Kinodynamic
Constraints Using RRT. IEEE Transactions on Indus-
trial Electronics, 65:8718–8729.
Mankowitz, D. et al. (2018). Multi-head reinforcement
learning. In Advances in Neural Information Process-
ing Systems, volume 31, pages 960–971.
Mnih, V., Kavukcuoglu, K., Silver, D., et al. (2013). Play-
ing Atari with Deep Reinforcement Learning. arXiv
1312.5602 cs.LG.
Mnih, V., Kavukcuoglu, K., Silver, D., et al. (2015).
Human-level control through deep reinforcement
learning. Nature, 518:529–533.
Nair, V. and Hinton, G. (2010). Rectified linear units im-
prove restricted Boltzmann machines. In ICML 2010,
pages 807–814.
13
https://github.com/Farama-Foundation/HighwayEnv
14
https://mujoco.org
Pedregosa, F. et al. (2011). Scikit-learn: Machine Learning
in Python. Journal of Machine Learning Research,
12:2825–2830.
Sall, R., Wagner, R., and Feng, J. (2019). Drivers’ Percep-
tions of Events: Implications for Theory and Practice.
In Proceedings of the Human Factors and Ergonomics
Society 2019 Annual Meeting, pages 1996–2000. Sage
Journals.
Shinners, P. (2011). PyGame. http://pygame.org/.
Sowerby, H., Zhou, Z., and Littman, M. (2022). Designing
Rewards for Fast Learning. arXiv 2205.15400 cs.LG.
Sprenger, F. (2022). Microdecisions and autonomy in self-
driving cars: virtual probabilities. AI & SOCIETY,
37:1–16.
Sutton, R. and Barto, A. (2018). Reinforcement Learning:
An Introduction. Bradford Books, 2 edition.
Thrun, S. and Schwartz, A. (1993). Issues in using function
approximation for reinforcement learning. In Pro-
ceedings of the 1993 Connectionist Models Summer
School.
Zeng, D. et al. (2019). A unified optimal planner for au-
tonomous parking vehicle. Control Theory and Tech-
nology, 17:346–356.
Zhang, P. et al. (2019). Reinforcement Learning-Based
End-to-End Parking for Automatic Parking System.
Sensors, 19:3996.
Double Q-Learning for a Simple Parking Problem: Propositions of Reward Functions and State Representations
171
