
Lower Leg Joint Strategies in the Outside Pass in Soccer
Yudai Yamamoto
1 a
, Viktor Koz
´
ak
2 b
and Ikuo Mizuuchi
3 c
1
Department of Food and Energy Systems Science, Tokyo University of Agriculture and Technology, Naka-cho 2-24-16,
Koganei-shi 184-0012, Tokyo-to, Japan
2
Czech Institute of Informatics, Robotics, and Cybernetics, Czech Technical University in Prague, Jugosl
´
avsk
´
ych Partyz
´
an
˚
u
1580/3, 160 00 Praha 6, Czech Republic
3
Department of Mechanical Systems Engineering, Tokyo University of Agriculture and Technology, Naka-cho 2-24-16,
Koganei-shi 184-0012, Tokyo-to, Japan
Keywords:
Medial Collateral Ligament, Lateral Collateral Ligament, Outside Pass, Strategies, Reinforcement Learning.
Abstract:
We study the leg motion for an outside pass in soccer, observing four different movement strategies. The aim
of this research is to validate the presence of these four strategies by training an agent with a higher reward
for kicking a faster ball. Additionally, we aim to explore the role of the collateral ligaments’ stiffness in the
outside pass. We built two leg models: (a) a two-degree-of-freedom leg model that applies torque around the
hip joint, and (b) a three-degree-freedom leg model that applies pitch-roll-yaw torque around the hip joint and
pitch torque around the knee joint. We trained a Deep Deterministic Policy Gradient (DDPG) agent using
these models and analyzed the torques around the hip and knee joints, as well as the ball velocity after the leg
loses contact with the ball. We observed three strategies similar to human behavior throughout agent learning.
1 INTRODUCTION
There are various types of passes in soccer, and each
pass is determined based on strategies. When focus-
ing on an outside pass without curve – where the ball
is kicked with the outside of the foot – we observe
four strategies: pulling the thigh backward diagonally,
bending the knee, stopping the thigh’s acceleration,
and stretching the knee suddenly. (Fig. 1). The body
motion can be studied using a mechanism embedded
in the human body called kinetic chain. The trans-
mission of the accumulated energy through kinetic
links and radiated energy at the time of ball throw
is demonstrated in (Senoo et al., 2008). The human
body has ability to store potential energy using its
elasticity (Chiras, 2018)(Ker et al., 1987)(Woo et al.,
1993)(Levin et al., 1927), We hypothesize that liga-
ment elasticity plays a role in energy accumulation
during the backward swing of the leg. For swing mo-
tion, using a robot by stopping the base link and ac-
celerating the end link is realized (Xu et al., 2007).
Furthermore, the use of elastic joint oscillation to
throw a faster ball by increasing the mechanical en-
a
https://orcid.org/0009-0004-1961-1992
b
https://orcid.org/0000-0001-8405-269X
c
https://orcid.org/0000-0003-4657-2613
Figure 1: Four strategies of an outside pass in soccer are as
follows:(1-1) Pulling the thigh backward diagonally rotat-
ing the hip joint around the roll-pitch-yaw axes and the knee
joint around the roll-pitch axes, (1-2) Bending the knee ro-
tating knee joint around the pitch axis, (2-1) Stopping the
thigh’s acceleration rotating the hip joint around the roll
axis , and (2-2) Stretching the knee suddenly rotating the
knee joint around the pitch axis.
ergy has been demonstrated (Hondo and Mizuuchi,
2012). We assume that ligaments facilitate the ex-
change of kinetic and potential energy between the
thigh and shin, enabling the leg movement to effi-
ciently convert into the shin’s kinetic energy. Studies
on muscle tendon utilization during kicking (Cerrah
et al., 2011) , jumping (Fukasawa, 2000), and step-
Yamamoto, Y., Kozák, V. and Mizuuchi, I.
Lower Leg Joint Strategies in the Outside Pass in Soccer.
DOI: 10.5220/0013306700003911
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 18th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2025) - Volume 1, pages 495-503
ISBN: 978-989-758-731-3; ISSN: 2184-4305
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
495
ping (Wiesinger et al., 2017)(Aeles and Vanwanseele,
2019) highlight the role of elastic elements. However,
research specifically focusing on ligament in sports
activities remains limited. In the case of an outside
pass, kicking the ball with the outside of the foot
may cause knee oscillation around the roll axis. The
goal of our research is to validate the presence of four
strategies in reinforcement learning agent with kick-
ing faster ball higher reward. Furthermore, we aim to
reveal the roles of collateral ligaments located on me-
dial and lateral side of the knee in an outside pass in
soccer.
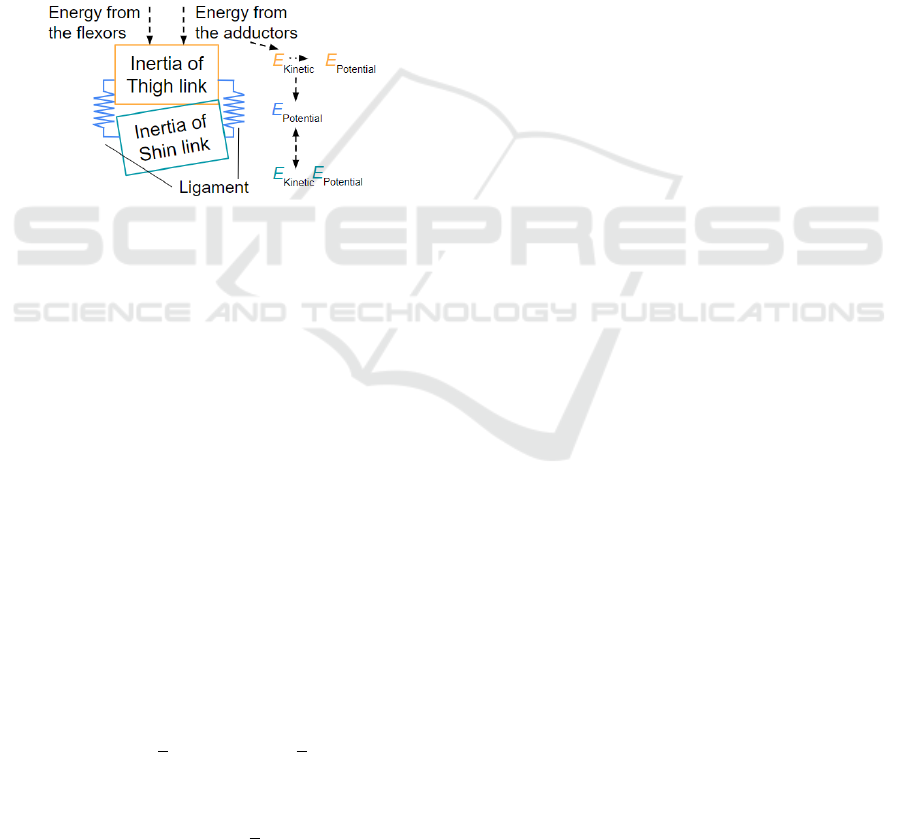
2 THE STRATEGIES
Figure 2: The four strategies collectively increase the ki-
netic energy of the shin, directing it towards the ball.
The rotational stiffness of the knee joint having two
collateral ligaments is non-linear. However for the
purpose of this research, the difference between non-
linear and linear joint stiffness is negligible. We mod-
eled the knee joint as two rigid links connected by a
torsional linear spring. The system’s equation of mo-
tion can be expressed as:
M
M
M(
(
(q
q
q)
)
)
¨
q
q
q + c
c
c(
(
(q
q
q,
,
,
˙
q
q
q)
)
) − τ
τ
τ
g
(
(
(q
q
q)
)
) = τ
τ
τ
p
(
(
(q
q
q,
,
,
˙
q
q
q)
)
) + u
u
u (1)
where q
q
q ∈ R
3
represents the generalized coordinates.
M
M
M(
(
(q
q
q)
)
) is the 3 × 3 inertia matrix, and c
c
c(
(
(q
q
q,
,
,
˙
q
q
q)
)
) ∈ R
3
is the Coriolis matrix. The terms τ
τ
τ
g
(
(
(q
q
q)
)
) and τ
τ
τ
p
(
(
(q
q
q,
,
,
˙
q
q
q)
)
)
are 3-dimensional vectors representing external joint
torques due to gravity, elasticity, and viscosity. Lastly,
u
u
u is the input torque vector. The total energy of
translational and rotational kinetic energy K(q
q
q,
˙
q
q
q), the
gravitational potential energy of the thigh and shin
U
Gravity
(q
q
q), and the ligament elastic potential energy
U
Elastic
(q
q
q) are expressed as follows:
K(q
q
q,
˙
q
q
q) =
1
2
v
v
v
T
COM
m
m
mv
v
v
COM
+
1
2
ω
ω
ω
T
I
I
Iω
ω
ω (2)
U
Gravity
(q
q
q) = −mg
g
gh
h
h (3)
U
Elastic
(q
q
q) =
1
2
kθ
θ
θ
2
(4)
where m is the mass, v
v
v
COM
is the center of mass
(COM) velocity, ω
ω
ω is the angular velocity, I
I
I is the
inertia tensor, h
h
h is the COM height, k is the knee
stiffness around roll axis, and θ
θ
θ is the knee roll an-
gle. Fig. 2 illustrates the energy flow between the
thigh and shin. Energy from the hip joint adductors
and knee joint flexors is transferred into the kinetic
and potential energy of the thigh, K
T high
and U
T high
(Pulling the thigh backward diagonally and bending
the knee). This increases the kinetic energy and ini-
tiates the kinetic chain. At the same time the hip
joint rotates around yaw axis to guide the kinetic en-
ergy toward the ball. Hip abduction and flexion are
small, with most of the energy goes to thigh’s kinetic
energy, K
T high
. This kinetic energy K
T high
then con-
verted into the potential energy of the ligaments and
muscle-tendon complex. By suddenly stopping the
motion of the hip joint along the roll, pitch, and yaw
axes, the kinetic energy is transferred to the lower
leg (Stopping the thigh’s acceleration). Consequently,
this action causes the knee joint to accelerate toward
the ball (Stretching the knee suddenly). After strik-
ing the ball, the leg does not swing through, reduc-
ing the thigh’s kinetic energy, K
T high
, and increasing
the shin’s kinetic energy, K
Shin
, and its potential en-
ergy due to gravity, U
Shin
. These four strategies col-
lectively work to increase the shin’s kinetic energy,
K
Shin
, and resulting in a faster ball. Taking the deriva-
tive of the kinetic energy in Eq. (2) with respect to
time t yields:
˙
K =
˙
v
v
v
T
COM
m
m
mv
v
v
COM
+
˙
ω
ω
ω
T
I
I
Iω
ω
ω (5)
The factors influencing the change in kinetic en-
ergy (K
Shin
) during swing motion have been studied
to explore methods for increasing the kinetic energy
of the end link (Asaoka and Mizuuchi, 2017). El-
ements such as angular acceleration, angular veloc-
ity, and the moment arm affect the energy transfer
rate within the leg. Studies on throwing (Tomohisa
et al., 1997)(Kozo and Takeo, 2006) and kicking mo-
tions (Kozo et al., 2007) have examined the energy
flow. Regardless of the scale of motion, even in out-
side pass, the acceleration and deceleration of the leg
ensure that kinetic energy flows from the thigh to the
shin.
3 METHODS
We determined the spring constant of the knee joint
around the roll axis based on the human parameters
(Table 1). Using reinforcement learning, we explic-
itly can decide a cost function for four strategies, such
as kicking a faster ball quickly. The reward function
BIOINFORMATICS 2025 - 16th International Conference on Bioinformatics Models, Methods and Algorithms
496
(A)
(B)
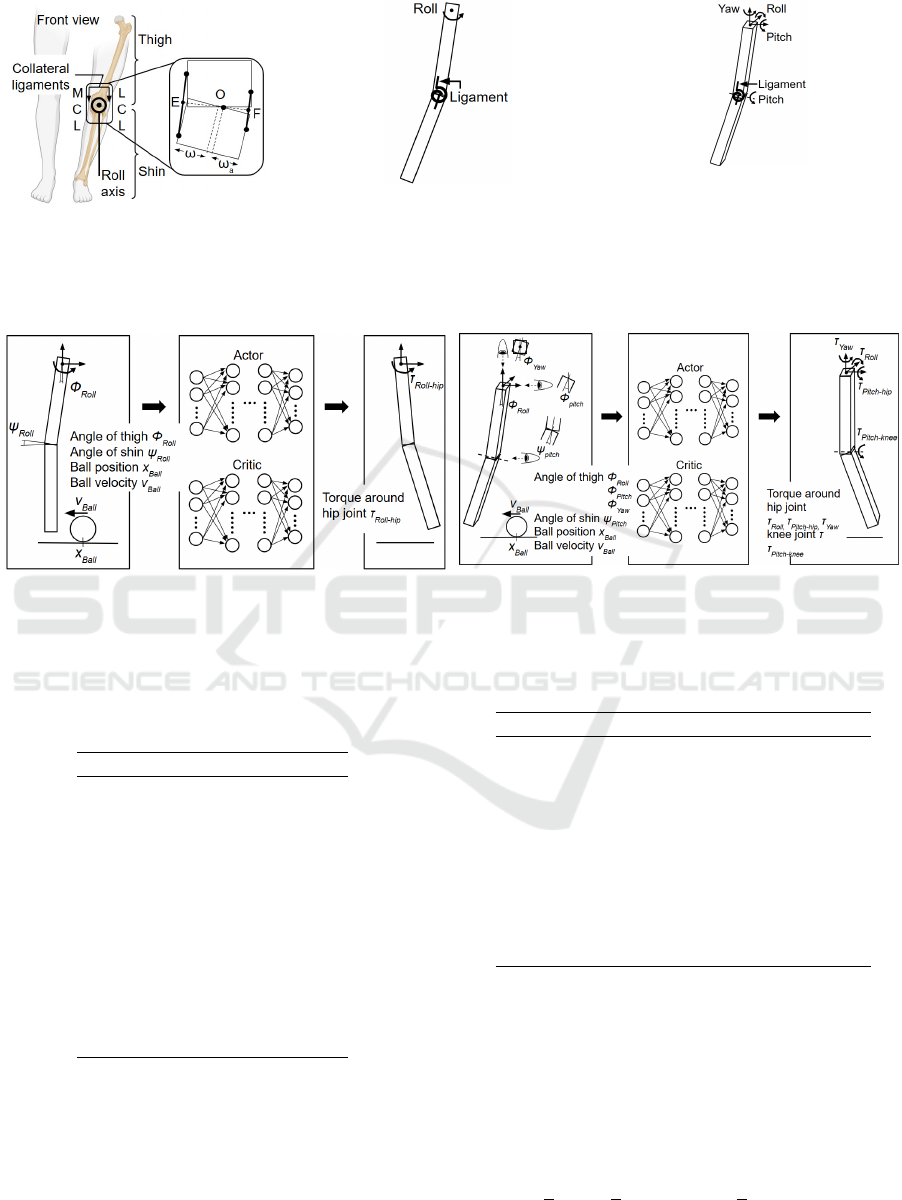
(a)Hip-Roll-Knee-Roll Leg Model
(C)
(b)Hip-RollPitchYaw-Knee-
RollPitch Leg Model
Figure 3: The medial collateral ligament (MCL) and lateral collateral ligament (LCL) are attached to the medial and lateral
sides of the knee joint. The stiffness of these ligaments is approximated as linear torsional stiffness for knee’s roll axis in both
(a) and (b).
(A) (B)
Figure 4: (A)The DDPG neural network model determines the torque input around the hip joint’s roll axis in knee model (a),
based on the angles of thigh and shin, the ball’s position, and its velocity. (B)The DDPG neural network model determines the
torque inputs around the hip and knee joints in knee model (b), based on the angles of the thigh and shin, the ball’s position,
and its velocity.
Table 1: Parameters of the leg and the ball (Ishii et al., 2009;
Herman, 2009; Ho-Jung and Dai-Soon, 2020; Christenson
and Casa, 2020; Nagurka et al., 2004).
Parameters Values
m
T high
7 kg
m
Shin
3.26 kg
m
Ball
0.43 kg
h
T high
0.4214 m
h
Shin
0.4231 m
w 0.0225 m
w
a
0.0147 m
l
MCL
68.99 × 10
−3
m
l
LCL
48.15 × 10
−3
m
k
MCL
71.97 × 10
3
N/m
k
LCL
69.70 × 10
3
N/m
k
Ball
10.88 × 10
3
N/m
was designed to ensure that the ball’s velocity after
impact is faster and that the range of motion of the
hip and knee joints remains within human limits (Ta-
ble 2). Under these conditions, we evaluated whether
the agent could gain a state-based action for the four
strategies.
Table 2: Human joint angle and torque limits.
Angle [deg] Torque [N · m]
Hip Joint
Flexion 132 105
Extension 15 158
Abduction 46 112
Adduction 23 76
Internal 38 84
External 46 67
Knee Joint
Flexion 154 126
Extension 0 229
3.1 Knee Joint Stiffness of Abduction
and Adduction
To simplify knee stiffness, we approximate the knee
as having a torsion spring instead of modeling it with
two ligaments. (Fig. 3(A)) Equating the potential en-
ergy of the ligaments to that of torsion spring gives
us
1
2
kθ
2
=
1
2
k
MCL
∆l
2
MCL
+
1
2
k
LCL
∆l
2
LCL
(6)
Lower Leg Joint Strategies in the Outside Pass in Soccer
497

where k represents the torsion spring constant, and θ
is the small flexion angle around the roll axis. k
MCL
and k
LCL
are the stiffness values of the two ligaments,
while ∆l
MCL
and ∆l
LCL
represent the elongations from
natural lengths. For small angles θ, ∆l
MCL
≈ |OE|θ,
∆l
LCL
≈ |OF|θ , where |OE| and |OF| are the moment
arms illustrated in Fig. 3(A).
K = k
MCL
|OE|
2
+ k
LCL
|OF|
2
(7)
Assuming small values for θ, |OE| and |OF| can
be considered constant: |OE|
2
= 2w
2
(1 − w
a
)
2
+
(l
2
MCL
/2) and |OF| = 2w
2
w
2
a
+ (l
2
LCL
/2), where l
MCL
and l
LCL
are the natural lengths of each ligament.
Using this approximation, the knee joint stiffness is
about 137 Nm/rad.
3.2 Leg and Leg-Ball Contact Model
We used two types of leg models: (a) Hip-
Roll-Knee-Roll Leg Model (Fig. 3(B)) and (b)
Hip-PitchRollYaw-Knee-PitchRoll Leg Model (Fig.
3(C)). Both models consist of two rigid links. In leg
model (a), the hip and knee joints rotate around the
roll axis, Φ
Roll
and Ψ
Roll
, respectively (Fig. 4(A)).
In leg model (b), the hip joint moves around the pitch,
roll, and yaw axes, while the knee joint rotates around
the pitch and roll axes, Φ
ROll
, Φ
Pitch
, Φ
Yaw
, Ψ
Roll
, and
Ψ
Pitch
(Fig. 4(B)). When the knee joint flexes around
the pitch axis, the lengths of the anterior cruciate liga-
ment and posterior cruciate ligament change (Li et al.,
2004). However, in this study, we focus only on the
knee stiffness around the roll axis, which is set to 100
N/rad. The damping of both the hip and knee joints
is set to 0.1 Nm/deg/s (Herman, 2009). At around 0
degrees of shin flexion relative to the thigh, the rota-
tional point of the knee joint around the roll axis is
located about 32.6% of the distance from the lateral
to the medial epicondyle (Dhaher and Francis, 2006).
The Contact model between the leg and the ball is ex-
pressed as s(d, w) · (k · d), where s(d, w) is a function
that monotonically increases from 0 to 1 as the pene-
tration d is less than the transition region width w. We
set w to 10
−4
m and the ball stiffness k to 100 N/m.
3.3 Workflow of Reinforcement
Learning
We made a DDPG agent using the Simulink Re-
inforcement Learning Toolbox (MATLAB 2024a,
The MathWorks, Inc., Natick, Massachusetts, United
States). We used DDPG, one of the actor-critic meth-
ods, because actor-critic methods can explore the con-
tinuous actions (Grondman et al., 2012). To further
explore the actions, we set the StandardDeviation to
1 and the StandardDeviationDecayRate to 0, increas-
ing the amount of noise in Ornstein-Uhlenbeck Ac-
tion Noise. Regarding the environment setup, the leg
initially starts in a straight position to the ground, with
no angular velocity, while the ball is situated at 0.55
m from the leg and has velocity to move horizontally
toward the leg. To let the ball hit to the leg, we applied
a pulse input of 134 force toward the ball for 3 ms us-
ing the External Force and Torque block in Simulink.
The time step for the simulation was set to 0.1 s.
3.3.1 Hip-Roll-Knee-Roll Leg Model
The DDPG agent (Lillicrap et al., 2019) outputs a
continuous action of torque around the hip joint in
the roll axis, τ
Roll−hip
, based on observations such as
the thigh angle Φ
Roll
, shin angle Ψ
Roll
, ball position
X
Ball
, and ball velocity V
Ball
(Fig. 4(A)). The reward
for action is set as follows:
R =
(
10V
Ball
−t −100 Φ
Roll
̸∈ (−23
◦
,46
◦
)
10V
Ball
−t Φ
Roll
∈ (−23
◦
,46
◦
)
(8)
where V
Ball
represents the current velocity of the ball
when it leaves the ball, and t is the current simula-
tion time. Each episode ends when the ball position
reaches a distance of 0.8250 m from the leg or when
the number of thigh swings reaches to 10 times. The
torque around the hip joint ranges between −76 N· m
and 112 N· m (Lanza et al., 2021) (Table 2). The op-
timization algorithms for optimizing the loss of both
the actor and critic were Adam (Adaptive movement
estimation).
3.3.2 Hip-RollPitchYaw-Knee-RollPitch Leg
Model
The DDPG agent outputs continuous actions of torque
around the hip joint in the pitch τ
Pitch−hip
, roll τ
Roll
,
yaw τ
Yaw
axes, as well as around the knee joint in the
pitch axis τ
Pitch−knee
based on observations such as the
thigh angle Φ
Pitch
Φ
Roll
Φ
Yaw
, the shin angle Ψ
Pitch
,
ball position X
Ball
, and ball velocity V
Ball
(Fig. 4(B)).
We assume that we do not change anything depend
on the knee ligament condition when policy is built.
Additionally, to enhance learning efficiency, we did
not employ the knee joint roll angle Ψ
Roll
for obser-
BIOINFORMATICS 2025 - 16th International Conference on Bioinformatics Models, Methods and Algorithms
498
vations. The reward for the actions is set as follows:
R =
15V
Ball
−t − 200
Φ
Pitch
̸∈ (−132
◦
,15
◦
)
Φ
Roll
̸∈ (−46
◦
,23
◦
)
Φ
Yaw
̸∈ (−38
◦
,46
◦
)
Ψ
Yaw
̸∈ (0
◦
,154
◦
)
15V
Ball
−t
Φ
Pitch
∈ (−132
◦
,15
◦
)
Φ
Roll
∈ (−46
◦
,23
◦
)
Φ
Yaw
∈ (−38
◦
,46
◦
)
Ψ
Yaw
∈ (0
◦
,154
◦
)
(9)
where V
Ball
represents the current velocity of the ball
when it leaves the leg, and t is the current simula-
tion time. Each episode ends when the ball posi-
tion reaches a distance of 0.8250 m from the leg or
when the number of thigh swings reaches to 10 times.
The torque around the hip joint in the pitch, roll and
yaw axes ranges from −105 N· m to 158 N· m, from
−112 N· m to 76 N· m, and from −84 N· m to 67
N· m, respectively (Lanza et al., 2021)(Lindsay et al.,
1992)(Pontaga, 2004)(Dibrezzo et al., 1985).
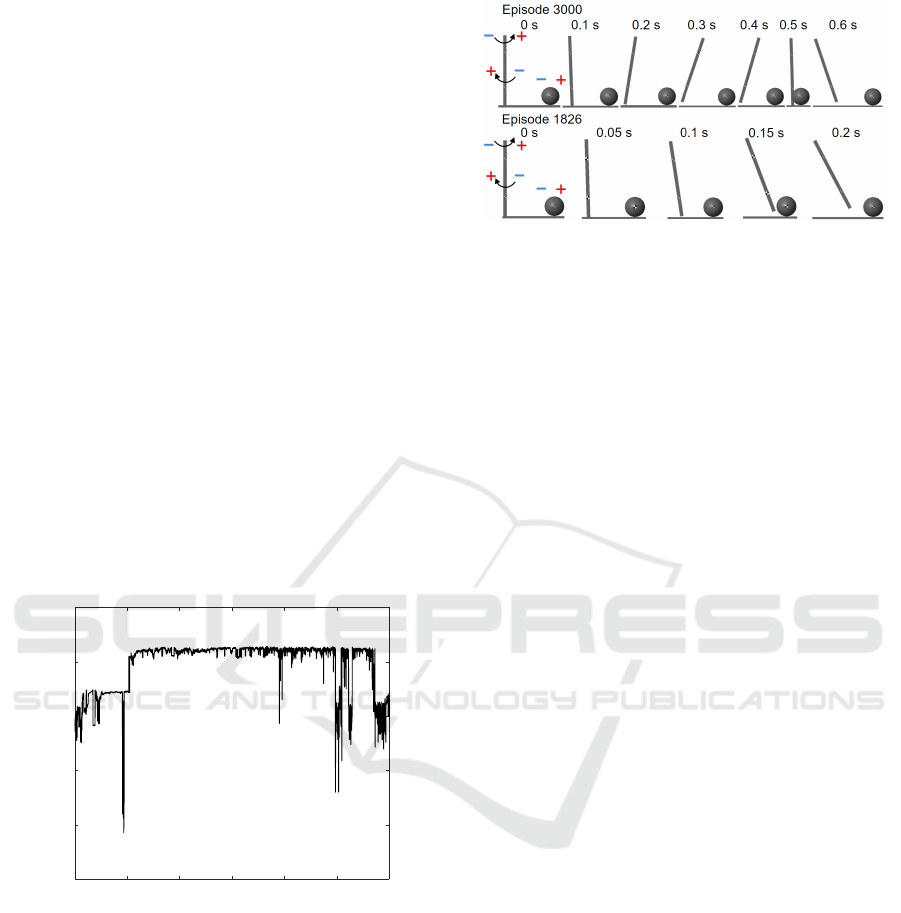
4 RESULTS AND DISCUSSIONS
0 500 1000 1500 2000 2500 3000
Number of Training Episodes
-150
-100
-50
0
50
100
Episode Reward Mean
Figure 5: Episode Reward Mean for (a) Hip-Roll-Knee-
Roll Leg Model.
4.1 Hip-Roll-Knee-Roll Leg Model
We trained the DDPG agent for 3000 episodes to en-
sure the reward had converged and the episode reward
mean converged around 500 episodes (Fig. 5). In
episode 3000, the agent applies a torque of 61.8 N · m
at 0 s, which reduces to −68.9 N ·m and then grad-
ually increases to 57.6 N ·m until the leg strikes the
ball at 0.49 s (Fig 7(C)). This torque sequence causes
the leg to move forward, then backward, and forward
again, which is pulling the thigh backward diagonally
Figure 6: Motion snapshots of model (a) at 3000 and 1826
episode.
(Fig. 6, Fig 7(A)). During this motion, the shin’s roll
angle oscillates due to ligament elasticity, which al-
lows the ligaments to hold potential energy until the
leg makes contact with the ball (Fig 7(B)). Pulling the
thigh backward diagonally causes this oscillation and
contributes to the onset of energy flow. After the leg
strikes the ball at 0.49 s, the hip torque around the
roll axis decreases, corresponding to the stopping the
thigh’s acceleration. This deceleration facilitates the
transfer of energy from the thigh to the shin. Addi-
tionally, it induces knee roll oscillation during con-
tact. The ball velocity reaches 6.13 m/s.
In 1826 episode, which achieved the highest
Episode Reward Mean, the agent applied a torque to
swing the leg to the ball with 110 N· m at 0.098 s.
This torque was reduced to 8.32 N· m at 0.18 s when
the leg contacts the ball (Fig. 7(F)). This reduction in
torque corresponds to stopping the thigh’s accelera-
tion (Fig 7(F)), enabling kinetic energy transfer from
the thigh to the shin and inducing oscillation of the
knee joint around roll axis (Fig 7(E)). Unlike 3000
episode, the hip joint angle increases monotonically,
and we did not observe the pulling the thigh back-
ward diagonally (Fig 7(D)). The ball’s velocity was
6.57 m/s when the leg lost contact.
4.2 Hip-RollPitchYaw-Knee-RollPitch
Leg Model
We tuned the hyperparameters (actor and critic learn-
ing rates and discount factor) using Bayesian opti-
mization in the Simulation Manager of MATLAB. We
set the actor learning rate, critic learning rate, and dis-
count factor in the range between 10
−3
and 1. We
set the metrics EpisodeReward to maximize it with a
maximum number of 30 trials. We tested two sets of
hyperparameters (Table 3). In the first set, we did not
observe the reward convergence while observe it in
the second set (Fig. 9). For the second set of tuned hy-
perparameters, We tuned the hyperparameters insert-
ing a Minibatch normalization layer between the fully
Lower Leg Joint Strategies in the Outside Pass in Soccer
499
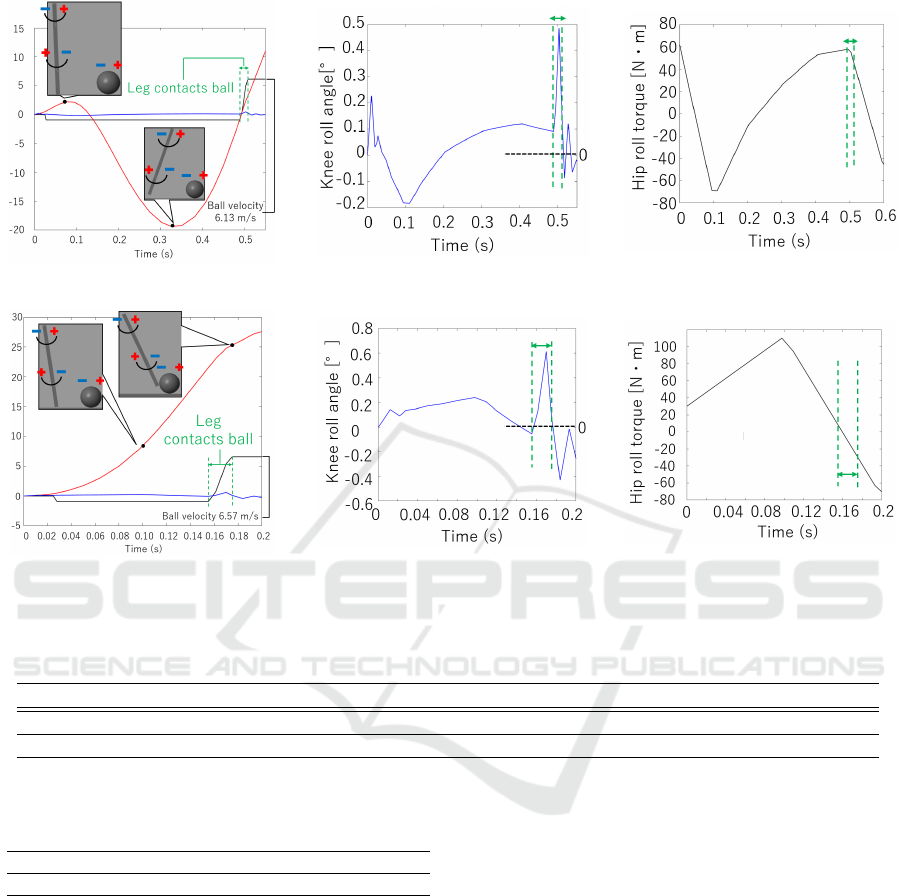
(A)
(B)
(C)
(D)
(E)
(F)
Figure 7: Ball velocity (black, (A)), thigh roll angle (red, (A)) and shin roll angle (blue, (A)(B)), along with hip roll torque
(black, (C)), at the 3000 episode. Same parameters at the 1826 episode for (D),(E), and (F) in the (a) leg model. The leg
makes contact with the ball between the green dotted lines.
Table 3: Tuned hyperparameters.
Actor learning rate Critic learning rate Discount factor Tuning with/without Batch Normalization
1 0.0712 0.0014 0.2440 Without
2 0.0014 0.0017 0.8534 With
Table 4: Ball velocity at 1826 episode of model (a) and at
2127 episode of model (b).
1826 episode (Model (a)) 2127 episode (Model (b))
6.57 m/s 6.39 m/s
connected layer and the nonlinear functions, Relu and
Tanh function.
In 3000 episode, the shin pitch torque starts at 12.7
N · m, increases to 26.1 N ·m at 0.1 s, and then de-
creases to 9.87 N · m by 0.15 s. The hip roll torque be-
gins at −22.2 N · m, decreases to −111.5 N · m at 0.1
s, and then rises to −30.2 N · m at 0.15 s (Fig. 8(I)).
This corresponds to the stopping the thigh’s acceler-
ation, causing the knee joint to rotate around the roll
axis. The leg makes contact with the ball below the
equilibrium angle of 0 deg ((Fig. 8(H))). The hip yaw
torque starts at −14.6 N · m, decreases to −21.3 N · m
at 0.1 s, and then rises to 6.08 N · m at 0.15 s. This
enables the foot to head outward as the knee joint ex-
tends (Fig. 10). We did not observe pulling the thigh
backward diagonally and the stretching the knee sud-
denly. The ball velocity reaches 5.84 m/s.
In 2127 episode, which achieved the highest
Episode Reward Mean, the shin pitch torque started at
5.21 N · m, increased to 22.8 N · m at 0.1 s, and then
decreased to 9.73 N · m by 0.15 s. The hip roll torque
began at −20.1 N · m, decreased to −111.8 N ·m at
0.1 s, and then increased to −34.6 N · m at 0.15 s.
This reduction corresponds to stopping the thigh’s ac-
celeration. (Fig. 8(L)). This action allows the kinetic
energy to transfer from the thigh to the shin, causing
the knee joint to oscillate around the roll axis (Fig.
8(K)). The leg makes contact with the ball at the equi-
librium angle of 0 deg. The hip pitch torque started at
1.75 N · m, decreasing to −31.0 N · m at 0.20 s. This
facilitates the internal rotation of the foot as the knee
BIOINFORMATICS 2025 - 16th International Conference on Bioinformatics Models, Methods and Algorithms
500
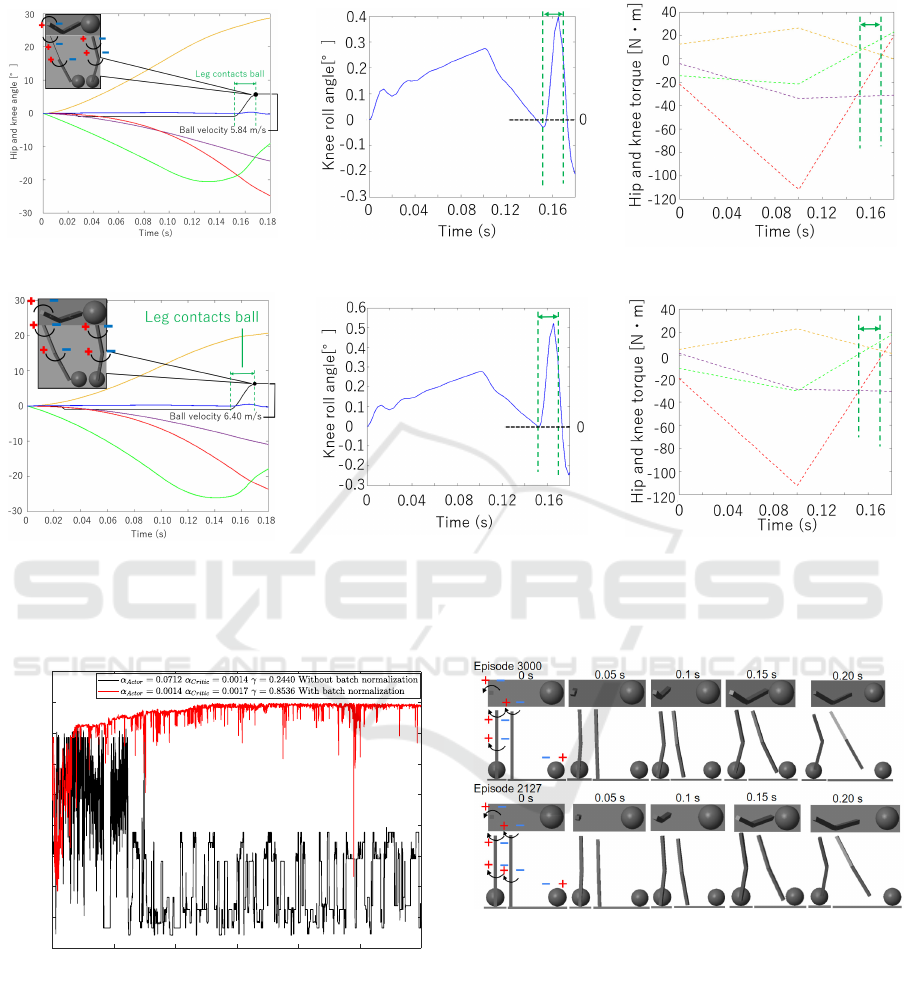
(G)
(H)
(I)
(J)
(K)
(L)
Figure 8: Ball velocity (black, (G)), thigh roll angle (red, (G)), thigh pitch angle (purple, (G)), thigh yaw angle (green, (G)),
shin roll angle (blue, (G) and (H)), shin pitch angle (yellow, (G)), along with hip roll torque (red, (I)), hip pitch torque (purple,
(I)), hip yaw torque (green, (I)), and knee pitch torque (yellow, (I)) at the 3000 episode. The same parameters are presented
for the 2127 episode in (J),(K), and (L) for the (b) leg model. The leg makes contact with the ball between green dotted lines.
0 500 1000 1500 2000 2500 3000
Number of Training Episode
-700
-600
-500
-400
-300
-200
-100
0
100
200
Episode Reward Mean
Figure 9: Episode Reward Mean for (b) Hip-RollPitchYaw-
Knee-RollPitch Leg Model.
joint extends. The hip joint angles increased mono-
tonically (Fig. 8(J)), and we did not observe pulling
the thigh backward diagonally and the stretching the
knee suddenly. The ball velocity reached 6.39 m/s.
Furthermore, we compared the ball velocity in 1826
episode of model (a) and 2127 episode of model (b),
the model (a) which leverages the stiffness of collat-
Figure 10: Motion snapshots of model (b) at 3000 and 2127
episode.
eral ligaments, produced a faster ball kick than the
model (b)(Table 4). Between the Fig. 7(E) and Fig.
8(K), the knee roll angle oscillates similarly; however,
the interaction phases differ. In the Fig. 8(K), the leg
makes contact with the ball at approximately 0 deg,
while in the Fig. 7(E), the leg exceeds 0 deg, oscil-
lating around the equilibrium angle of the knee. This
joint oscillation, driven by the ligaments, affects on
the ball velocity. These results suggest that utilizing
collateral ligaments leads to a faster ball.
Lower Leg Joint Strategies in the Outside Pass in Soccer
501

5 CONCLUSION
We confirmed that the agent developed strategies sim-
ilar to an outside pass in soccer. For the leg model (a),
episode 1826 showed stopping the thigh’s accelera-
tion while did not show pulling the thigh backward di-
agonally. 3000 episode included both. In contrast, leg
model (b) demonstrated bending the knee and stop-
ping the thigh’s acceleration at episodes 2127 and
3000, while we did not observe the pulling the thigh
backward diagonally and stretching the knee sud-
denly. Additionally, we observed that the leg model
(a), which utilizes the collateral ligaments’ stiffness,
resulted in a faster ball compared to leg model (b),
which is capable of moving in directions that do
not engage the collateral ligaments’ stiffness. We
achieved better understanding of the joint strategies
in an outside pass where ligaments involve, which is
beneficial for developing strategies to kick faster ball
with small motion. For future work, we aim to inves-
tigate whether oscillation around the roll axis of the
knee joint occurs in human. Additionally, we plan to
further explore strategies involving muscle strength-
ening and knee joint oscillation in other sports, such
as tennis and volleyball.
REFERENCES
Aeles, J. and Vanwanseele, B. (2019). Do stretch-
shortening cycles really occur in the medial gastroc-
nemius? a detailed bilateral analysis of the muscle-
tendon interaction during jumping. Front Physiol.
Asaoka, T. and Mizuuchi, I. (2017). Generation of the
swing motion pattern of a multi-link robot for the ex-
plosive increase of the kinetic energy of the end-link
by exploiting dynamic coupling. Transactions of the
JSME (in Japanese).
Cerrah, A. O., Gungor, E. O., Soylu, A. R., Ertan, H., Lees,
A., and Bayrak, C. (2011). Muscular activation pat-
terns during the soccer in-step kick. Isokinetics and
Exercise Science.
Chiras, D. D. (2018). Human Biology. Jones Bartlett Learn-
ing.
Christenson, A. J. and Casa, D. J. (2020). Analysis on the
effect of ball pressure on head acceleration to ensure
safety in soccer. Proceedings.
Dhaher, Y. Y. and Francis, M. J. (2006). Determination
of the abduction-adduction axis of rotation at the hu-
man knee: helical axis representation. Journal of or-
thopaedic research : official publication of the Or-
thopaedic Research Society.
Dibrezzo, R., Gench, B. E., Hinson, M. M., , and King, J.
(1985). Peak torque values of the knee extensor and
flexor muscles of females. The Journal of orthopaedic
and sports physical therapy.
Fukasawa, S. (2000). Biomechanics in stretch-shortening
cycle exercise. Japanese Society of Physical Educa-
tion.
Grondman, I., Busoniu, L., Lopes, G. A. D., and Babuska,
R. (2012). A survey of actor-critic reinforcement
learning: Standard and natural policy gradients. IEEE
Transactions on Systems, Man, and Cybernetics, Part
C (Applications and Reviews).
Herman, I. P. (2009). Physics of the Human Body Biological
and Medical Physics, Biomedical Engineering. NTS.
Ho-Jung, C. and Dai-Soon, K. (2020). Mechanical proper-
ties and characteristics of the anterolateral and collat-
eral ligaments of the knee. Applied Sciences.
Hondo, T. and Mizuuchi, I. (2012). Realization method
of high kinetic energy utilizing elastic joints based on
feedback excitation control and analysis of equal en-
ergy hypersurfaces. Proceedings of the 2012 JSME
Conference on Robotics and Mechatronics.
Ishii, H., Yanagiya, T., Naito, H., Katamoto, S., and
Maruyama, T. (2009). Numerical study of ball behav-
ior in side-foot soccer kick based on impact dynamic
theory. J Biomech.
Ker, R. F., Bennett, M. B., Bibby, S. R., Kester, R. C., and
Alexander, R. M. (1987). The spring in the arch of the
human foot. Nature.
Kozo, N. and Takeo, M. (2006). A 3d dynamical model
for analyzing the motion-dependent torques of upper
extremity to generate throwing arm velocity during an
overhand baseball pitch. Jpn J Biomechanics Sports
Exerc.
Kozo, N., Yosuke, F., and Takeo, M. (2007). Analysis of
mechanical energy generation, transfer and causal en-
ergy sources in soccer instep kick. The Proceedings of
Joint Symposium: Symposium on Sports Engineering,
Symposium on Human Dynamics.
Lanza, M. B., Rock, K., Marchese, V., Addison, O., and
Gray, V. L. (2021). Hip abductor and adductor rate
of torque development and muscle activation, but not
muscle size, are associated with functional perfor-
mance. Frontiers in Physiology.
Levin, A., Wyman, J., and Hill, A. V. (1927). The viscous
elastic properties of muscle. Proceedings of the Royal
Society of London. Series B, Containing Papers of a
Biological Character.
Li, G., DeFrate, L. E., Sun, H., and Gill, T. J. (2004). In
vivo elongation of the anterior cruciate ligament and
posterior cruciate ligament during knee flexion. The
American journal of sports medicine.
Lillicrap, T. P., Hunt, J. J., Pritzel, A., Heess, N., Erez, T.,
Tassa, Y., Silver, D., and Wierstra, D. (2019). Contin-
uous control with deep reinforcement learning. arXiv.
Lindsay, D. M., Maitland, M., Lowe, R. C., and Kane, T. J.
(1992). Comparison of isokinetic internal and external
hip rotation torques using different testing positions.
Journal of Orthopaedic & Sports Physical Therapy.
Nagurka, M., , and Huang, S. (2004). A mass-spring-
damper model of a bouncing ball. Proceedings of the
2004 American Control Conference.
Pontaga, I. (2004). Hip and knee flexors and extensors bal-
BIOINFORMATICS 2025 - 16th International Conference on Bioinformatics Models, Methods and Algorithms
502

ance in dependence on the velocity of movements. Bi-
ology of Sport.
Senoo, T., Namiki, A., and Ishikawa, M. (2008). High-
speed throwing motion based on kinetic chain ap-
proach. 2008 IEEE/RSJ International Conference on
Intelligent Robots and Systems.
Tomohisa, M., Norihisa, F., Michiyoshi, A., Yasuo, K., and
Morhihiko, O. (1997). A three-dimensional analysis
on mechanical energy flows of torso and arm segments
in baseball throw. Japanese Journal of Physical Fit-
ness and Sports Medicine.
Wiesinger, H. P., Rieder, F., K
¨
osters, A., M
¨
uller, E., and
Seynnes, O. R. (2017). Sport-specific capacity to use
elastic energy in the patellar and achilles tendons of
elite athletes. Front Physiol.
Woo, S. L., Johnson, G. A., and Smith, B. A. (1993). Math-
ematical modeling of ligaments and tendons. Journal
of Biomechanical Engineering.
Xu, C., Ming, A., Maruyama, T., and Shimojo, M. (2007).
Motion generation for hyper dynamic manipulation.
Mechatronics.
Lower Leg Joint Strategies in the Outside Pass in Soccer
503
