
Class-Specific Dataset Splitting for YOLOv8: Improving Real-Time
Performance in NVIDIA Jetson Nano for Faster Autonomous Forklifts
Chaouki Tadjine
1,2 a
, Abdelkrim Ouafi
2 b
, Abdelmalik Taleb-Ahmed
1 c
and Yassin El Hillali
1 d
1
Univ. Polytechnique Hauts-de-France, CNRS, Univ. Lille, UMR 8520 - IEMN - Institut d’Electronique de
Microelectronique et de Nanotechnologie, Valenciennes, F-59313, Hauts-de-France, France
2
Univ. Mohamed Khider Biskra, Department of Electrical Engineering, Faculty of Sciences and Technology, LVSC - Lab.
Vision et Syst
`
emes de Communication, 07000, Biskra, Algeria
fi
Keywords:
YOLOv8, LOCO Dataset, Object Detection, Autonomous Forklifts, Real-Time Inference, NVIDIA Jetson
Nano.
Abstract:
This research examines a class-specific YOLOv8 model setup for real-time object detection using the Logistics
Objects in Context dataset, specifically looking at how it can be used in high-speed autonomous forklifts to
enhance obstacle detection. The dataset contains five common object classes in logistics warehouses. It is
divided into transporting tools (forklift and pallet truck) and goods-carrying tools (pallet, small load carrier,
and stillage) to meet specific task needs. Two YOLOv8 models were individually trained and implemented
on the NVIDIA Jetson Nano, with each one specifically optimized for a tool category. Using this approach
tailored to specific classes resulted in a 30.6 percent decrease in inference time compared to training a single
YOLOv8 model on all classes. Task-specific detection saw a 74.4 percent improvement in inference time
for transporting tools and 56.2 percent improvement for goods-carrying tools. Furthermore, the technique
decreased the hypothetical distance traveled during inference from 45.14 cm to 31.32 cm and even as low as
11.55 cm for transporting tools detecting while still preserving detection accuracy with a minor drop of 1.25%
in mean average precision. The integration of these models onto the NVIDIA Jetson Nano made this approach
compatible for future autonomous forklifts and showcases the potential of the technique to improve industrial
automation. This study demonstrates a useful and effective method for real-time object detection in intricate
warehouse settings by matching detection tasks with practical needs.
1 INTRODUCTION
The technology of object detection is crucial for au-
tomating logistics warehouses, allowing self-driving
forklifts to move through intricate surroundings, mon-
itor products, and dodge obstacles instantly (Zaccaria
et al., 2020). Quick and precise object detection
is crucial for keeping operations efficient, avoiding
accidents, and ensuring smooth processes, particu-
larly when forklifts are moving at increased veloci-
ties. The Logistic Objects in Context (LOCO) dataset,
created for logistics object detection tasks, consists of
five equipments in warehouse settings: forklift, pal-
let truck, pallet, small load carrier (SLC), and stillage
(Mayershofer et al., 2020). The dataset has unbal-
a
https://orcid.org/0009-0000-6110-9956
b
https://orcid.org/0000-0002-6083-1688
c
https://orcid.org/0000-0001-7218-3799
d
https://orcid.org/0000-0002-3980-9902
anced annotations, whereas the premilinary annota-
tions are demonstrated in Figure 1.
Figure 1: LOCO dataset annotations.
788
Tadjine, C., Ouafi, A., Taleb-Ahmed, A. and El Hillali, Y.
Class-Specific Dataset Splitting for YOLOv8: Improving Real-Time Performance in NVIDIA Jetson Nano for Faster Autonomous Forklifts.
DOI: 10.5220/0013308700003905
In Proceedings of the 14th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2025), pages 788-793
ISBN: 978-989-758-730-6; ISSN: 2184-4313
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

In the state-of-the-art works related to the LOCO
dataset (Savas and Hinckeldeyn, 2022; Khalfallah
et al., 2024; Clavero et al., 2024), they train an ob-
ject detection model to detect all five object classes at
once, which is not the optimal and efficient choice to
use in for every specific warehouse task. For instance,
it is crucial to identify equipment such as pallets,
small load carriers, and stillages used for transporting
goods in picking operations that prioritize identify-
ing items for shipping. Identifying moving equipment
like forklifts and pallet trucks is essential for safely
navigating and avoiding obstacles in warehouse ac-
tivities.
In order to meet these specific requirements, we
suggest categorizing the objects based on their us-
age: either for transporting (forklift and pallet truck)
or carrying goods (pallet, small load carrier, and stil-
lage). This categorization helps in focusing on object
detection by aligning it with task requirements, which
may reduce computational burden.
Our approach utilizes this categorization by cre-
ating individual YOLOv8 models for each category,
enabling detection specific to the task. The effective-
ness of this approach was assessed in improving in-
ference efficiency and preserving detection accuracy.
By utilizing the trained models on the NVIDIA Jetson
Nano, we assessed how well they can achieve quicker
inference times while maintaining the necessary prac-
ticality for autonomous forklift operations within dy-
namic warehouse settings.
Lightweight models like YOLOv8n are ideal for
edge devices like the NVIDIA Jetson Nano to attain
real-time performance due to their blend of speed and
accuracy (Asdikian et al., 2024). In this research, we
taught YOLOv8n models using the class-specific par-
tition of the LOCO dataset and assessed their results
in relation to real-time object tracking and obstacle
evasion. The focus on the Jetson Nano was on achiev-
ing fast inference time and high accuracy, essential
for high-speed forklifts. Quicker inference times are
important because they enable vehicles to react faster
to obstacles, enhancing safety and efficiency in logis-
tic operations. By looking into the prototyping works
for forklift automation (Mohamed et al., 2018; Behrje
et al., 2018; Cidal et al., 2019; Zaccaria et al., 2021),
the only forklift that has publicly available top speed
is Jungheinrich EVT 216, whereas this forklift has
maximum speeds of 11 km/h, which is around 3.055
m/s. Therefore, we considered it as reference speed
in our evaluations.
2 METHODOLOGY
The proposed method in our approach is to sepa-
rate the dataset objects leading to train two fine-tuned
YOLOv8 models, whereas they can be used depend-
ing on the requested task, however they can be com-
bined to work same as single model trained for all the
dataset at once. The figure 2 summarizes the func-
tionality of the proposed method.
2.1 Dataset Preparation
The LOCO dataset has five classes with unbalanced
annotations, it was split into 60% for training, 25% for
validation, and 15% for testing. Due the unbalanced
nature of the dataset, the splitting was an annotation-
based split, ensuring that each class was proportion-
ally represented in the training, validation, and testing
sets. This approach preserves the class distribution
across all phases of model development.
From this annotated split, we divided the dataset
by isolating the annotations of forklifs and pallet
trucks (transporting tools) to train it in one model.
The remaining three classes (goods carrier tools) were
used to train a second model. This approach en-
sured that we maintained the same annotations for
each class across all models, which was crucial for
conducting a fair comparison between the combined
and split model approaches. Table 1 represents the
data fed into the models.
2.2 Model Settings
We chose YOLOv8n for our tests because of its com-
pact design, which makes it ideal for running on the
limited resources of the Jetson Nano. YOLOv8n nor-
mally uses a 640x640 input image resolution, find-
ing a middle ground between detection precision and
computational speed.
Initially, we trained YOLOv8n on the complete
dataset with a standard resolution of 640x640 for all
five classes in our evaluation. We fine-tuned the class-
specific split models by adjusting the resolution ac-
cording to the class distribution. The model trained on
the two-class subset (tools for transporting) utilized
a smaller image size of 256x256, while the model
trained on the three-class subset (tools for carrying
goods) used a larger resolution of 384x384. This
method guaranteed that the total resolution of both di-
vided models was 640x640, ensuring a fair compari-
son in total resolution.
Class-Specific Dataset Splitting for YOLOv8: Improving Real-Time Performance in NVIDIA Jetson Nano for Faster Autonomous Forklifts
789
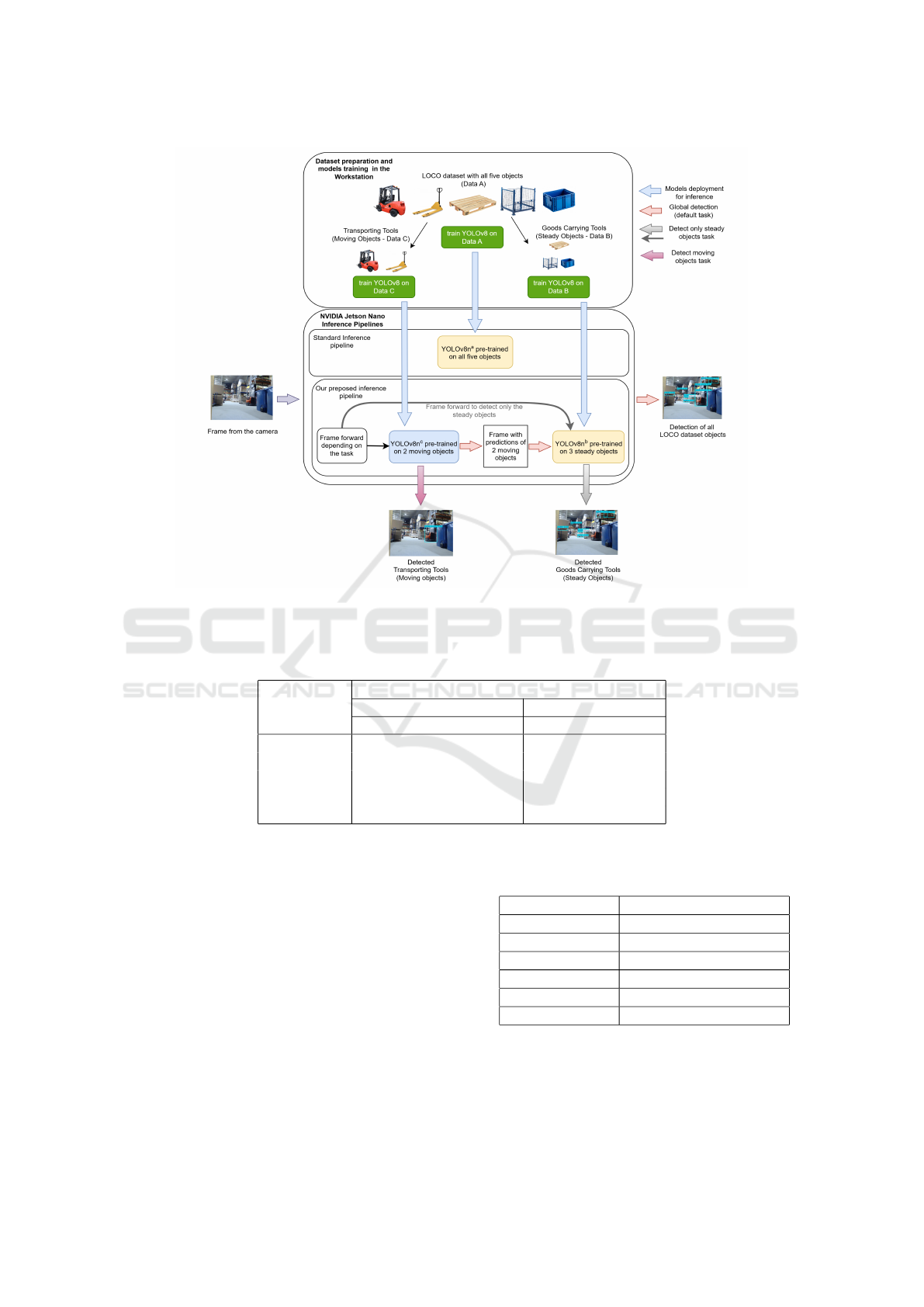
Figure 2: Proposed class-specific dataset splitting method on YOLOv8 for LOCO dataset.
Table 1: The used data for training, validation, and testing for YOLOv8n evaluation. YOLOv8n
a
is trained on data A.
YOLOv8n
b
is trained on data B, and YOLOv8n
c
is trained on data C. Data A is a combination of DATA B and C that contains
all classes.
Class
Data A
Data B Data C
Train Val Test Train Val Test
SLC 13303 5532 3316 – – –
Forklift – – – 353 153 92
Pallet 72306 30097 18042 – – –
Stillage 3247 1351 809 – – –
Pallet Truck – – – 1695 708 474
(–): No annotations for this class in the subset.
2.3 Experimental Setup
For model training, we utilized a workstation
equipped with a powerful GPU to ensure efficient
processing and faster training times for the YOLOv8
models. The specifications of the workstation are in
Table 2.
After the models training, we moved them to the
Jetson Nano for validation. We utilized the desig-
nated ultralytics docker container for the Jetson Nano
(Jocher et al., 2023). This method is required since
the Jetson Nano officially operates on Ubuntu 18.04,
which includes an incompatible Python version for
the YOLOv8 setup. The Docker container has Python
Table 2: Workstation Specifications for Model Training.
Component Specification
CPU Intel Core i7-12700K
Memory 64GB DDR5 6000 MHz
GPU NVIDIA RTX 3090
Python version 3.8.19
PyTorch version 2.0.1
CUDA version 11.7
3.8.0 and CUDA 10.2, as well as PyTorch 1.11.0, to
guarantee compatibility and efficient execution of the
YOLOv8 models. Table 3 displays the Jetson Nano
specifications.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
790

Table 3: NVIDIA Jetson Nano 4GB Specifications.
Component Specification
GPU Tegra X1 (128-core Maxwell)
CPU Quad-core ARM Cortex-A57
Memory 4GB LPDDR4
Storage 32GB
Python Version 3.8 via docker
PyTorch Version 1.11.0
CUDA version 10.2
During validation, we set the batch size to one to
emulate the performance of frame-by-frame real-time
video processing. This configuration allows us to as-
sess how effectively the models can detect in a contin-
uous video stream, simulating real-world conditions
that autonomous forklifts would encounter in logistics
environments. Furthermore, we evaluated the model’s
efficiency for rapid forklift operations by calculating
the distance covered in each frame prediction.
In model assessment, we used Precision (P), Re-
call (R), and Mean Average Precision (mAP) as the
main metric, which are commonly used for com-
paring object detection models. These metrics of-
fer a thorough evaluation of precision among various
classes and aid in evaluating the efficiency of models
in identifying different objects in the logistics setting.
3 RESULTS AND DISCUSSION
We trained YOLOv8n in three settings and named our
pretrained models as YOLOv8n
a
, YOLOv8n
b
, and
YOLOv8n
c
. YOLOv8n
a
is the model that was trained
for all the objects in dataset. YOLOv8n
b
is trained on
goods-carrying objects. YOLOv8n
c
is model trained
on transporting tools. Table 4 showcases the accu-
racies and inference times obtained in the NVIDIA
Jetson Nano.
3.1 Detection Accuracy Comparison
The YOLOv8n
b
and YOLOv8n
c
Outperformed
YOLOv8n
a
when evaluated with precision, which
means the detections has less confusion over
YOLOv8n
a
. YOLOv8n
c
reached higher accuracy for
forklift detection in all evaluation matrices and out-
performed the YOLOv8n
a
on this class. However,
the other objects showed slightly lower mAP@50 and
recall results when using YOLOv8n
c
or YOLOv8n
b
compared to YOLOv8n
a
. Specifically, the accuracy
loss across classes ranged between approximately 1%
to 5% per class in mAP. Despite the modest accu-
racy losses in detecting other objects, our method
demonstrated enhanced detection performance for
high-resolution (1080p) for forklift detection us-
ing YOLOv8n
c
compared to YOLOv8n
a
as demon-
strated in figure 3. Nevertheless, the YOLOv8n
b
and
YOLOv8n
c
models showed lower performance when
480p resolution footage was employed, resulting in
more objects being missed compared to YOLOv8n
a
.
The reduced accuracy in YOLOv8n
b
and YOLOv8n
c
models is due to the smaller image sizes (256 and
384), leading to decreased detection reliability for ob-
jects at lower resolutions and far distances. Figure
4 displays the findings from detecting images with a
480p resolution.
3.2 Inference Time Comparison
YOLOv8n
b
demonstrated a noteworthy enhancement
with an inference time of 64.7 ms, which is a sig-
nificant improvement of approximately 56.2% com-
pared to YOLOv8n
a
with 147.7 ms. Specifically, the
time it takes to detect specialized forklifts and pallet
trucks using the YOLOv8n
c
model has been reduced
by 74.4%, now taking only 37.8 ms, showing a sig-
nificant increase in efficiency with customized mod-
els that have smaller image sizes. The data in table 5
displayed the overall time taken for inference by two
models compared to a model trained on 5 classes.
3.3 Inference Impact over High-Speed
Forklift
The combined inference time for YOLOv8n
b
and
YOLOv8n
c
models, trained on 3 and 2 classes respec-
tively, was significantly faster than the inference time
of YOLOv8n
a
, which was trained on all 5 classes.
Together, YOLOv8n
b
and YOLOv8n
c
have an infer-
ence time of 102.5 ms (64.7 ms for YOLOv8n
b
and
37.8 ms for YOLOv8n
c
), compared to 147.7 ms for
YOLOv8n
a
. This leads to a 30.6% improvement in
inference time, demonstrating that dividing the detec-
tion task among specialized models with lower reso-
lution can efficiently decrease processing time. This
increase in efficiency is particularly advantageous for
real-time tasks, as quicker detection can enhance the
responsiveness of autonomous systems, like forklifts
in warehouses with varying speeds.
The inference time of each YOLOv8 model used
in a forklift moving at 11 km/h (around 305.56 cm/s)
directly affects how frequently the system can iden-
tify and respond to obstacles. As an illustration,
YOLOv8n
b
takes 64.7 ms for inference, allowing
the forklift to move 19.77 cm in each inference cy-
cle. This enhances the forklift’s ability to detect ob-
jects effectively while moving. YOLOv8n
c
allows
the forklift to move 11.55 cm in one inference, de-
Class-Specific Dataset Splitting for YOLOv8: Improving Real-Time Performance in NVIDIA Jetson Nano for Faster Autonomous Forklifts
791

Table 4: Performance results for YOLOv8n
a
, YOLOv8n
b
, and YOLOv8n
c
across evaluation metrics (Precision, Recall, and
mAP50) with their inference times on NVIDIA Jetson Nano.
Class
YOLOv8n
a
YOLOv8n
b
YOLOv8n
c
Precision Recall mAP50 Precision Recall mAP50 Precision Recall mAP50
SLC 0.749 0.424 0.579 0.771 0.307 0.541 – – –
Forklift 0.854 0.497 0.685 – – – 0.887 0.562 0.725
Pallet 0.872 0.449 0.663 0.887 0.332 0.613 – – –
Stillage 0.881 0.508 0.711 0.900 0.442 0.685 – – –
Pallet Truck 0.820 0.503 0.666 – – – 0.837 0.442 0.643
Inference (ms) 147.7 64.7 37.8
Image size 640 384 256
(-): Model not trained for this class.
(a) YOLOv8n
a
(b) YOLOv8n
b
(c) YOLOv8n
c
Figure 3: Comparative detection results for 1080p image. YOLOv8n
c
gave best performance to detect pallet trucks.
(a) Detection result for YOLOv8n
a
(b) Detection result for YOLOv8n
b
(c) Detection result for YOLOv8n
c
Figure 4: Comparative detection results for 480p image. YOLOv8n
a
detected a pallet truck as a forklift.
Table 5: Combined models performance over single model.
Model Precision Recall mAP50 mAP50-95 Inference (ms)
YOLOv8n
a
0.8350 0.476 0.661 0.397 147.7
YOLOv8n
b+c
(ours) 0.8575 0.431 0.6485 0.392 102.5
creasing inference time to 37.8 ms giving faster up-
dates. This particular frequency is very beneficial
for quickly detecting nearby objects, minimizing the
chances of missing obstacles.
When YOLOv8n
b
and YOLOv8n
c
are combined,
their cumulative inference time of 102.5 ms leads to a
distance of 31.32 cm per inference cycle. Although
this is slower than YOLOv8n
c
alone, it remains a
substantial improvement over the YOLOv8n
a
model,
trained on all five classes, which has an inference time
of 147.7 ms and results in a distance of 45.14 cm per
inference. The increased time interval between frame
updates in YOLOv8n
a
may reduce the accuracy of ob-
stacle detection, as the forklift may travel a consider-
able distance before the next frame is analyzed by the
model. In fast-paced environments, this delay could
heighten the chance of quickly appearing obstacles.
Table 6 illustrates the distance covered during each
inference with a forklift moving at a speed of 11km/h.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
792

Table 6: Theoretical distance per inference for Forklift with
speed of 11km/h.
Model mAP50 Inference (ms) Distance (cm)
YOLOv8n
a
0.661 147.7 45.14
YOLOv8n
b+c
(ours) 0.6485 102.5 31.32
YOLOv8n
b
(ours) 0.613 64.7 19.77
YOLOv8n
c
(ours) 0.684 37.8 11.55
4 CONCLUSIONS
This research findings confirmed that training the
YOLOv8 model with a class-specific dataset split
from the LOCO dataset greatly improved inference
efficiency, resulting in a 30.6% decrease in overall in-
ference time. Significantly, there were even more im-
provements in targeted detection tasks, with inference
times decreasing by 74.4% for transporting tools and
56.2% for carrying tools. When applied to a forklift
moving at a top speed of 11 km/h, this method re-
duced the distance covered per inference round from
45.14 cm to 31.32 cm, resulting in a minimum travel
distance of 11.55 cm when identifying transporting
equipment. Hence, these improvements were made
with only a 1.25% decrease in mAP, ensuring ade-
quate accuracy for real-world use.
In addition, the research discovered that decreas-
ing the image size setting in YOLOv8 resulted in a
notable decrease in inference times, which enhanced
its efficiency in real-time object detection. Yet, the
decrease in resolution led to failures in detection, es-
pecially for smaller objects. The results show that de-
creasing image size is most advantageous for datasets
with bigger object annotations, while the accuracy of
detection remains mostly unchanged. Hence, it is ad-
vised to utilize this technique in situations with high-
resolution photos and bigger objects to strike a perfect
equilibrium between speed of inference and perfor-
mance of detection.
ACKNOWLEDGEMENTS
We acknowledge the use of ChatGPT4o to enhance
the readability of our paper.
REFERENCES
Asdikian, J. P. H., Li, M., and Maier, G. (2024). Per-
formance evaluation of YOLOv8 and YOLOv9 on
custom dataset with color space augmentation for
Real-time Wildlife detection at the Edge. In 2024
IEEE 10th International Conference on Network Soft-
warization (NetSoft), pages 55–60. ISSN: 2693-9789.
Behrje, U., Himstedt, M., and Maehle, E. (2018). An Au-
tonomous Forklift with 3D Time-of-Flight Camera-
Based Localization and Navigation. In 2018 15th
International Conference on Control, Automation,
Robotics and Vision (ICARCV), pages 1739–1746.
Cidal, G. M., Cimbek, Y. A., Karahan, G., B
¨
oler, O. E.,
¨
Ozkardesler, O., and
¨
Uvet, H. (2019). A Study
on the Development of Semi Automated Warehouse
Stock Counting System. In 2019 6th International
Conference on Electrical and Electronics Engineering
(ICEEE), pages 323–326.
Clavero, C., Patricio, M. A., Garc
´
ıa, J., and Molina, J. M.
(2024). DMZoomNet: Improving Object Detection
Using Distance Information in Intralogistics Environ-
ments. IEEE Transactions on Industrial Informatics,
20(7):9163–9171. Conference Name: IEEE Transac-
tions on Industrial Informatics.
Jocher, G., Qiu, J., and Chaurasia, A. (2023). Yolov8 by
ultralytics. original-date: 2022-09-11T16:39:45Z.
Khalfallah, S., Bouallegue, M., and Bouallegue, K. (2024).
Object detection for autonomous logistics: A yolov4
tiny approach with ros integration and loco dataset
evaluation. Engineering Proceedings, 67(1).
Mayershofer, C., Holm, D.-M., Molter, B., and Fottner,
J. (2020). LOCO: Logistics Objects in Context. In
2020 19th IEEE International Conference on Machine
Learning and Applications (ICMLA), pages 612–617.
Mohamed, I. S., Capitanelli, A., Mastrogiovanni, F.,
Rovetta, S., and Zaccaria, R. (2018). Detection, local-
isation and tracking of pallets using machine learning
techniques and 2D range data.
Savas, R. and Hinckeldeyn, J. (2022). Critical Eval-
uation of LOCO dataset with Machine Learning.
arXiv:2209.13499 [cs].
Zaccaria, M., Giorgini, M., Monica, R., and Aleotti, J.
(2021). Multi-Robot Multiple Camera People Detec-
tion and Tracking in Automated Warehouses. In 2021
IEEE 19th International Conference on Industrial In-
formatics (INDIN), pages 1–6.
Zaccaria, M., Monica, R., and Aleotti, J. (2020). A Com-
parison of Deep Learning Models for Pallet Detection
in Industrial Warehouses. In 2020 IEEE 16th Interna-
tional Conference on Intelligent Computer Communi-
cation and Processing (ICCP), pages 417–422.
Class-Specific Dataset Splitting for YOLOv8: Improving Real-Time Performance in NVIDIA Jetson Nano for Faster Autonomous Forklifts
793
