
One-Shot Polarization-Based Material Classification
with Optimal Illumination
Miho Kurachi
1
, Ryo Kawahara
2 a
and Takahiro Okabe
3 b
1
Department of Artificial Intelligence, Kyushu Institute of Technology, Iizuka, Fukuoka 820-8502, Japan
2
Graduate School of Informatics, Kyoto University, Sakyo-ku, Kyoto 606-8501, Japan
3
Information Technology Track, Okayama University, Kita-ku, Okayama 700-8530, Japan
Keywords:
Material Classification, Polarization, Illumination, Margin Maximization.
Abstract:
Image-based classification of surface materials is important for machine vision applications such as visual
inspection. In this paper, we propose a novel method for one-shot per-pixel classification of raw materials
on the basis of polarimetric feature such as the degree of linear polarization (DoLP) and the angle of linear
polarization (AoLP). It is known that the polarimetric feature depends not only on the intrinsic properties
of surface materials but also on the directions and wavelengths of light sources. Accordingly, our proposed
method jointly optimizes the non-negative light source intensities for feature extraction and the discriminant
hyperplane in the feature space via margin maximization so that the appearances of different materials are
discriminative. We conducted a number of experiments using real images captured by using a light stage, and
show that our method using a single input image works better than/comparably to the existing methods using
a single/multiple input images.
1 INTRODUCTION
Classifying material categories such as metals and
plastics, materials themselves such as iron and alu-
minum, and their surface states such as rust, cracks,
and scratches are important for computer vision ap-
plications such as visual inspection of metallic sur-
faces (Zheng et al., 2002; Pernkopf and O’Leary,
2003) and printed circuit boards (Tominaga and
Okamoto, 2003; Ibrahim et al., 2010). In this
study, we focus on planar and unpainted raw mate-
rials, and achieve appearance-based per-pixel mate-
rial classification that works in a non-contact and non-
destructive manner.
The polarimetric properties of reflected light such
as the degree of linear polarization (DoLP) and the
angle of linear polarization (AoLP) play important
roles for material classification (Wolff, 1990; Chen
and Wolff, 1998). It is known that the DoLP of the
reflected light depends on the refractive index of a
surface material and differently behaves for specu-
lar and diffuse materials, and the AoLPs of specular
and diffuse materials are different by π/2 (Shurcliff,
a
https://orcid.org/0000-0002-9819-3634
b
https://orcid.org/0000-0002-2183-7112
1962). The latter is because specular reflectance (re-
flectivity)/diffuse reflectance (transmissivity) is max-
imal when the polarization direction is perpendicu-
lar/parallel to the outgoing plane according to the
Fresnel equations.
In general, the reflected light observed on an ob-
ject surface consists of a diffuse reflection component
and a specular reflection component, and the mixture
ratio of those components depends also on the illumi-
nation condition. Specifically, the mixture ratio de-
pends on both the direction and wavelength of a light
source through the roughness and spectral reflectance
of the surface. Therefore, the apparent DoLP and
AoLP depends not only on the intrinsic properties,
i.e. the refractive index, roughness, and spectral re-
flectance of the object surface but also on the direc-
tions and wavelengths of light sources (Kondo et al.,
2020; Ichikawa et al., 2023).
Accordingly, we propose a novel method for
polarization-based per-pixel material classification
with the optimal illumination. We consider the 7D
polarimetric feature space on the basis of the polari-
metric image captured by using a polarization cam-
era with a four linear polarization filter. We show the
relationship between the illumination condition, i.e.
the intensities of multi-spectral and multi-directional
738
Kurachi, M., Kawahara, R. and Okabe, T.
One-Shot Polarization-Based Material Classification with Optimal Illumination.
DOI: 10.5220/0013312700003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
738-745
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

light sources and the polarimetric feature, and jointly
optimize both the illumination condition for feature
extraction and the discriminant hyperplane in the fea-
ture space via margin maximization. Moreover, we
impose the non-negativity constraints on the light
source intensities, and achieve one-shot material clas-
sification that is applicable to dynamic objects as well.
The existing techniques for polarization-based
material classification (Chen et al., 2009; Liang et al.,
2022) often assume passive illumination, and then do
not optimize the illumination condition under which
input images are taken. In the context of material
classification based on grayscale/color images (Gu
and Liu, 2012; Liu and Gu, 2014; Wang and Okabe,
2017), the illumination condition is optimized so that
the appearances of different materials are discrimina-
tive, but they do not utilize polarimetric clues. In con-
trast to those existing methods, our proposed method
takes both the polarimetric clues and the illumination
condition into consideration.
To confirm the effectiveness of our proposed
method, we conducted a number of experiments us-
ing the images captured by using a polarization cam-
era and an LED-based light stage, i.e. multi-spectral
and multi-directional light sources. We show that the
performance of our method using a single input im-
age is better than/comparable to those of the existing
methods using a single/multiple input images.
The main contributions of this study are twofold.
First, we propose a novel method for one-shot per-
pixel material classification based on the polarimet-
ric clues under the optimal illumination. Specifically,
we show the relationship between the intensities of
multi-spectral and multi-directional light sources and
the polarimetric feature, and jointly optimize both the
non-negative illumination condition for feature ex-
traction and the discriminant hyperplane in the feature
space via margin maximization. Second, we experi-
mentally show that our method using a single input
image works better than/comparably to the existing
methods using a single/multiple input images.
2 RELATED WORK
2.1 Polarization-Based Classification
In general, the reflected light observed on an object
surface consists of a diffuse reflection component and
a specular reflection component. It is known that the
DoLP of the reflected light depends on the refractive
index of a surface material and differently behaves
for specular and diffuse components, and the AoLPs
of those components are different by π/2 (Shurcliff,
1962). The seminal works by Wolff (Wolff, 1990)
and Chen and Wolff (Chen and Wolff, 1998) study
those properties of specular and diffuse reflection
components, and propose polarization-based methods
for classifying metals and dielectrics. Unfortunately,
however, their methods require a number of images
taken under varying polarization states, and then have
difficulties in classifying materials of objects in mo-
tion.
The polarimetric properties are often combined
with the other modalities for material classification.
Chen et al. (Chen et al., 2009) show the effective-
ness of multi-spectral and polarimetric imaging for
classifying material categories. Recently, Liang et
al. (Liang et al., 2022) show the effectiveness of
multi-spectral and polarimetric images for material
segmentation. They assume passive illumination, and
then do not optimize the illumination condition under
which input images are taken. On the other hand, our
proposed method optimizes active illumination so that
the appearances of different materials are discrimina-
tive, since the polarimetric properties such as DoLP
and AoLP depends not only on the intrinsic proper-
ties of the object surface but also on the directions
and wavelengths of light sources.
2.2 Illumination Optimization
In general, the coded illumination using multiple light
sources is efficient in terms of SNR (Signal-to-Noise
Ratio) and the number of required images. It is
shown that the coded illumination is effective for im-
age acquisition (Schechner et al., 2003), BRDF (Bidi-
rectional Reflectance Distribution Function) measure-
ment (Ghosh et al., 2007), shape recovery (Ma et al.,
2007), and spectral reflectance recovery (Park et al.,
2007). Whereas those methods optimize the coded il-
lumination for reconstructing signals with high SNRs,
our proposed method optimizes the illumination con-
dition in terms of discriminative ability.
The coded illumination is utilized also for mate-
rial classification. Gu and Liu (Gu and Liu, 2012)
and Liu and Gu (Liu and Gu, 2014) propose an ap-
proach to per-pixel classification of raw materials
based on spectral BRDFs. Specifically, they optimize
the intensities of multi-spectral and multi-directional
light sources for two/multi-class classification via lin-
ear SVMs/Fisher LDA. Unfortunately, however, their
methods require two/multiple images taken under ac-
tual light sources with non-negative intensities, since
they allow the optimal intensities could be negative.
Wang and Okabe (Wang and Okabe, 2017) achieve
per-pixel material classification from a single color
image by jointly optimizing the light source inten-
One-Shot Polarization-Based Material Classification with Optimal Illumination
739

sities and the disctiminant hyperplane with the non-
negative constraints on the light source intensities. In
contrast to those methods, our method takes account
of the polarimetric clues as well as the illumination
condition into consideration.
3 PROPOSED METHOD
3.1 Setup
Similar to the existing techniques (Gu and Liu, 2012;
Liu and Gu, 2014; Wang and Okabe, 2017), we
assume that objects of interest are planar and un-
painted raw materials. Our proposed method illumi-
nates those objects by using a light stage with L light
sources, and then capture the images of them by us-
ing a polarization camera with a four linear polariza-
tion filter. We denote the four pixel values observed
at a certain surface point through the four linear po-
larization filter (0
◦
, 45
◦
, 90
◦
, and 135
◦
) by i
1
, i
2
, i
3
,
and i
4
1
. Unless otherwise noted, we omit the pixel’s
index since we address per-pixel classification.
Our proposed method uses the L images, each of
which is captured under each light source, for train-
ing. On the other hand, our method uses a single im-
age, which is captured under the L light sources with
the optimal intensities, for test.
3.2 Two-Class Classification
Feature Space and Discriminant Hyperplane:
We consider the 7D polarimetric feature on the ba-
sis of the polarimetric image as (i
1
,i
2
,i
3
,i
4
,ρ,c,s)
⊤
.
Here, ρ is the DoLP, c = cos(2φ), and s = sin(2φ) re-
spectively, where φ (−π/2 ≤ φ ≤ π/2) is the AoLP.
Note that c and s are continuous at φ = ±π/2.
Our proposed method finds the linear discriminant
hyperplane defined by
4
∑
d=1
w
′
d
i
d
+ ||w
w
w||
2
(w
′
5
ρ + w
′
6
c + w
′
7
s) + b = 0 (1)
in the 7D feature space. Here, we call the set of light
source intensities w
w
w = (w
1
,w
2
,w
3
,...,w
L
)
⊤
the light
source vector and the set of the weights of the polari-
metric features w
w
w
′
= (w
′
1
,w
′
2
,w
′
3
,...,w
′
7
)
⊤
the polari-
metric vector, and b is the bias. We explain the reason
why the 2-norm of the light source vector ||w
w
w||
2
is re-
quired later.
1
We assume that the four pixel values are obtained per
pixel via demosaicing.
Polarimetric Feature and Illumination:
We denote the four set of pixel values observed un-
der each of the L light sources with unit intensity as
x
x
x
d
= (x
d1
,x
d2
,x
d3
,...,x
dL
)
⊤
(d = 1, 2, 3, 4). Accord-
ing to the superposition principle of illumination, the
pixel value i
d
captured under the L light sources is
represented as
i
d
= w
w
w
⊤
x
x
x
d
(2)
by using the light source vector w
w
w. Note that eq.(2)
is the projection from 4L-dimensional space to 4D
space, and it acts as the feature extraction.
Substituting eq.(2) into eq.(1), we can rewrite the
linear discriminant hyperplane as
4
∑
d=1
w
′
d
w
w
w
⊤
x
x
x
d
+ ||w
w
w||
2
×
(w
′
5
ρ(w
w
w) + w
′
6
c(w
w
w) + w
′
7
s(w
w
w)) + b = 0. (3)
Here, ρ(w
w
w), c(w
w
w), and s(w
w
w) explicitly describe that
those features depend on the light source vector w
w
w,
but we omit (w
w
w) unless otherwise noted to make the
notation simpler.
Joint Optimization:
Our proposed method jointly optimizes both the illu-
mination condition, i.e. the light source vector w
w
w and
the discriminant hyperplane, i.e. the pair of the polari-
metric vector w
w
w
′
and the bias b via margin maximiza-
tion. In the 7D feature space, the distance between a
point (i
1
,i
2
,i
3
,i
4
,ρ,c,s)
⊤
and the discriminant hyper-
plane in eq.(3) is given by
|
∑
4
d=1
w
′
d
w
w
w
⊤
x
x
x
d
+ ||w
w
w||
2
(w
′
5
ρ + w
′
6
c + w
′
7
s) + b|
||w
w
w||
2
2
||w
w
w
′
||
2
2
.
(4)
Note that we can set the numerator to 1 for the set
of points nearest to the discriminant hyperplane, i.e.
support vectors without loss of generality in the same
manner as the formulation of SVMs (Vapnik, 1998).
This is because both the first and second terms of the
numerator are proportional to the overall scales of w
w
w
and w
w
w
′
.
Hence, the optimization results in
min
w
w
w,w
w
w
′
,b,{ξ
n
}
1
2
||w
w
w||
2
2
||w
w
w
′
||
2
2
+
α
N
N
∑
n=1
ξ
n
(5)
subject to
y
n
"
4
∑
d=1
w
′
d
w
w
w
⊤
x
x
x
nd
+ ||w
w
w||
2
×
(w
′
5
ρ
n
+ w
′
6
c
n
+ w
′
7
s
n
) + b
≥ 1 − ξ
n
(n = 1, 2, 3, ..., N), (6)
ξ
n
≥ 0 (n = 1,2,3,...,N), (7)
w
l
≥ 0 (l = 1,2,3,...,L). (8)
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
740
Here, y
n
and ξ
n
are the label (+1 or -1) and the slack
variable of the n-th sample. We denote the number of
training samples and the weight of the penalty term
by N and α/N respectively. In order to achieve one-
shot classification, we impose the non-negativity con-
straints on the light source intensities in eq.(8).
We use an alternative optimization technique for
solving the above optimization, because when one
of the light source vector w
w
w and the pair of the po-
larimetric vector and the bias {w
w
w
′
,b} is fixed, it
approximately results in the quadratic programming
with respect to the other. Specifically, we iteratively
update one of them; we fix w
w
w and update {w
w
w
′
,b}
via quadratic programming, and then we fix {w
w
w
′
,b}
and {ρ(w
w
w),c(w
w
w),s(w
w
w)} by using w
w
w computed at the
previous iteration and update w
w
w via quadratic pro-
gramming. In our current implementation, we set
the initial condition of the light source vector w
w
w to
(1,1,1,...,1)
⊤
.
3.3 Multi-Class Classification
Combination of Two-Class Classification:
We combine the two-class classifiers for multi-class
classification on the basis of binary tree. Let us con-
sider 4-class classification for example. First, we
find the two-class classifier that discriminates the four
classes (A, B, C, and D) into {A, B} and {C, D}. Sec-
ond, we find the two-class classifier that discriminates
A and B, and the two-class classifier that discrimi-
nates C and D. In general, we require M = (K − 1)
two-class classifiers for K-class classification.
Discriminant Hyperplanes:
In a similar manner to the two-class classifier for-
mulated by eq.(3), we represent the m-th (m =
1,2,3,...,M) linear discriminant hyperplane as
4
∑
d=1
w
′
md
w
w
w
⊤
x
x
x
d
+ ||w
w
w||
2
×
(w
′
m5
ρ(w
w
w) + w
′
m6
c(w
w
w) + w
′
m7
s(w
w
w)) + b
m
= 0.
(9)
Here, w
w
w
′
m
and b
m
are the m-th polarimetric vector and
bias. Note that we achieve one-shot multi-class clas-
sification by sharing a single light source vector w
w
w
among M classifiers.
Joint Optimization:
We jointly optimize the light source vector w
w
w and the
set of the polarimetric vector and bias {w
w
w
′
m
,b
m
} (m =
1,2,3,...,M) in a similar manner to the two-class clas-
sification. Specifically, the joint optimization is for-
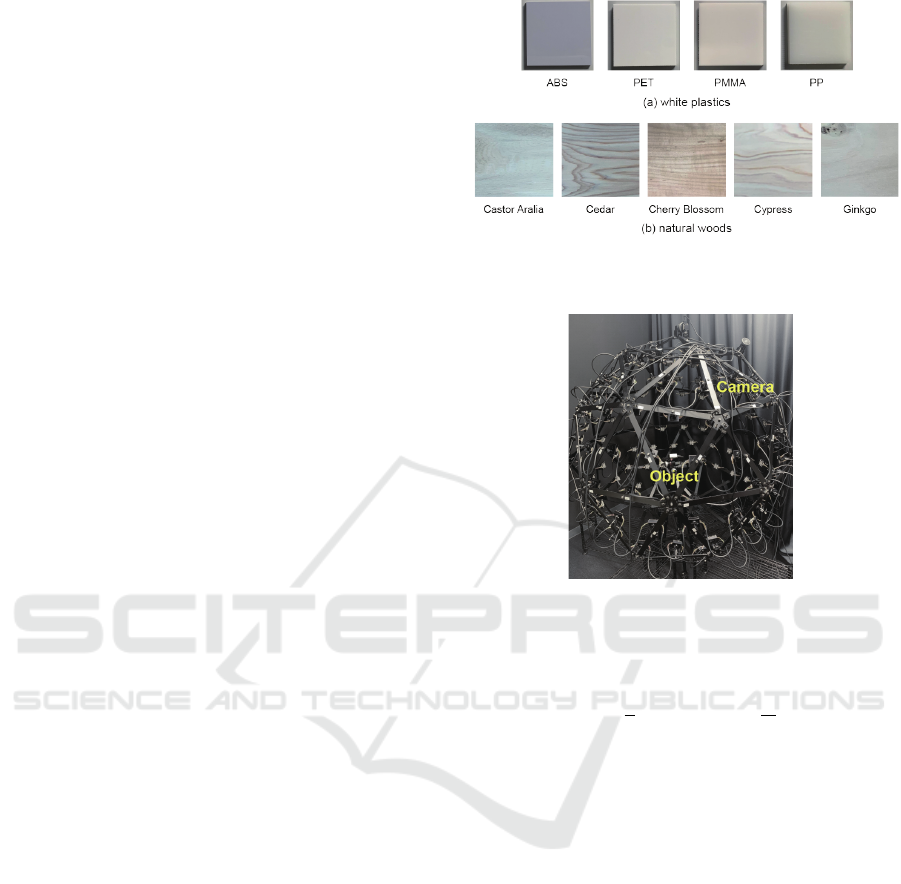
Figure 1: Two sets of raw materials with similar appear-
ances: (a) white plastics and (b) natural woods.
Figure 2: Our Kyutech-OU light stage II for illuminating an
object of interest located at the center.
mulated as
min
w
w
w,w
w
w
′
m
,b,{ξ
mn
}
M
∑
m=1
1
2
||w
w
w||
2
2
||w
w
w
′
m
||
2
2
+
α
N
N
∑
n=1
ξ
mn
!
(10)
subject to
y
mn
"
4
∑
d=1
w
′
md
w
w
w
⊤
x
x
x
mnd
+ ||w
w
w||
2
×
(w
′
5
ρ
mn
+ w
′
6
c
mn
+ w
′
7
s
mn
) + b
m
≥ 1 − ξ
mn
(m = 1, 2, 3, ..., M) (n = 1,2,3,...,N), (11)
ξ
mn
≥ 0
(m = 1, 2, 3, ..., M) (n = 1,2,3,...,N), (12)
w
l
≥ 0 (l = 1,2,3,...,L). (13)
In a similar manner to the two-class classifica-
tion, we solve the above optimization via an alter-
native optimization technique. Specifically, we set
the initial condition of the light source vector w
w
w to
(1,1,1,...,1)
⊤
, and then iteratively update the set of
{w
w
w
′
m
,b
m
} (m = 1, 2, 3, ..., M) by fixing w
w
w and vice
versa.
One-Shot Polarization-Based Material Classification with Optimal Illumination
741
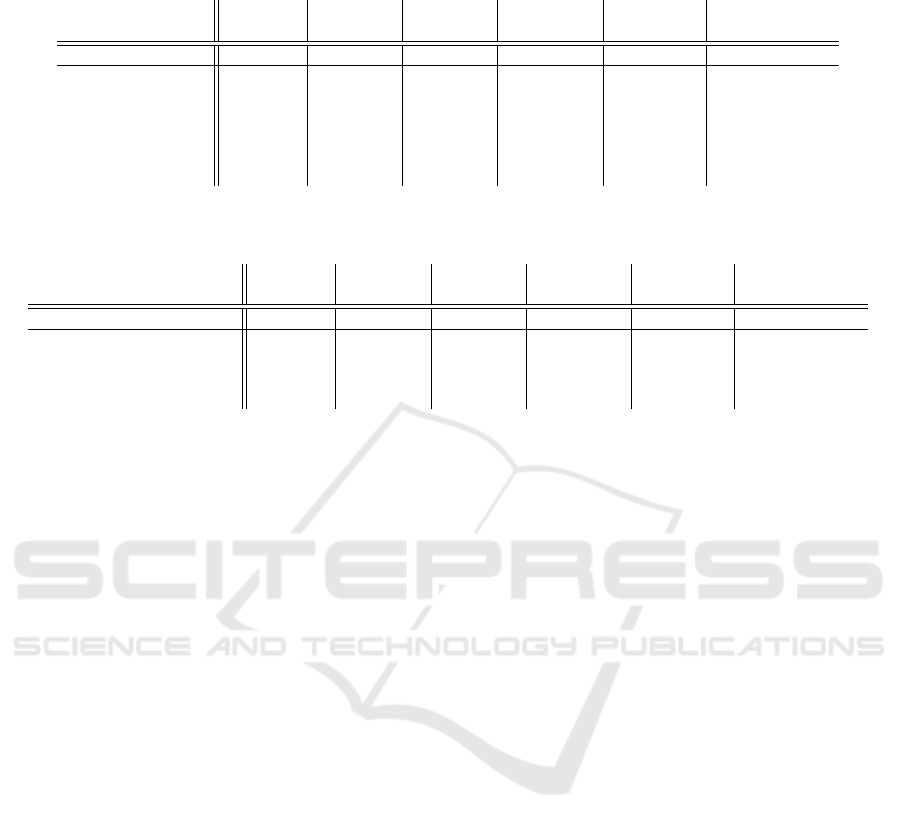
Table 1: The classification accuracies (%) of the two-class classification for the white plastics: ours, ours with fixed w
w
w
′
, ours
with fixed w
w
w, Gu and Liu, SegFormer with s
0
, and SegFormer with (s
0
,s
1
,s
2
) from left to right.
Ours Ours with Ours with Gu and Liu SegFormer SegFormer
fixed w
w
w
′
fixed w
w
w with s
0
with (s
0
,s
1
,s
2
)
Number of images single single single two single single
ABS vs. PET 100.00 100.00 100.00 100.00 87.99 99.94
ABS vs. PMMA 100.00 100.00 100.00 100.00 94.75 83.15
ABS vs. PP 99.94 100.00 99.88 100.00 99.61 90.38
PET vs. PMMA 100.00 99.94 86.22 96.27 53.28 50.67
PET vs. PP 100.00 100.00 100.00 100.00 99.87 83.96
PMMA vs. PP 100.00 100.00 100.00 100.00 99.66 99.98
Table 2: The classification accuracies (%) of the two-class classification for the natural woods: ours, ours with fixed w
w
w
′
, ours
with fixed w
w
w, Gu and Liu, SegFormer with s
0
, and SegFormer with (s
0
,s
1
,s
2
) from left to right.
Ours Ours with Ours with Gu and Liu SegFormer SegFormer
fixed w
w
w
′
fixed w
w
w with s
0
with (s
0
,s
1
,s
2
)
Number of images single single single two single single
Castor Aralia vs. Ginkgo 100.00 99.96 98.36 99.60 99.28 99.97
Cedar vs. Cypress 99.16 99.10 75.36 98.90 51.45 53.65
Cedar vs. Cherry Blossom 99.74 99.44 98.00 99.26 97.52 93.76
Cypress vs. Ginkgo 97.30 94.12 80.74 92.82 91.18 83.04
4 EXPERIMENTS
In this Section, we explain our experimental setup,
and then report our experimental results for two-class
classification and multi-class classification. We show
that the effectiveness of our proposed method is re-
markable, especially for more challenging scenarios,
i.e. one-shot multi-class classification.
4.1 Experimental Setup
We tested two sets of raw materials with similar ap-
pearances. One is the set of 4 white plastics: ABS,
PET, PMMA, and PP in Figure 1 (a). The other is the
set of 5 natural woods: Castor Aralia, Cedar, Cherry
Blossom, Cypress, and Ginkgo in Figure 1 (b). We
can see that the texture of Cedar, Cherry Blossom,
and Cypress are more prominent than that of Castor
Aralia and Ginkgo.
We captured the images of those objects by us-
ing a polarization camera of BFS-U3-51S5P-C from
FLIR and our Kyutech-OU light stage II in Figure 2.
Similar to the existing light stages (Gu and Liu, 2012;
Liu and Gu, 2014; Wang and Okabe, 2017), the light
stage consists of the LED clusters at different direc-
tions, and each cluster has narrow-band LEDs with
different spectral intensities. In our experiments, we
used the images taken under 92 (= L) light sources;
23 directions × 4 spectral intensities.
To confirm the effectiveness of our proposed
method, we compared the performances of the fol-
lowing six methods:
• Ours: Our method jointly optimizes the light
source vector w
w
w for feature extraction and the po-
latimetric vector w
w
w
′
(and the bias b) for the dis-
criminant hyperplane in the feature space. Ours
achieves one-shot classification by imposing the
non-negative constraints on the light source inten-
sities.
• Ours with fixed w
w
w
′
: This method is used for the
ablation study of the polarimetric feature. Specif-
ically, we fix the polarimetric vector as w
w
w
′
=
(1/4,1/4,1/4,1/4,0,0,0)
⊤
in our method. In
other words, it uses the s
0
component of the
Stokes vector under the optimized illumination.
• Ours with fixed w
w
w: This method is used for
the ablation study of the illumination optimiza-
tion. Specifically, we fix the light source vector
as w
w
w = (1,1,1,...,1)
⊤
in our method. In other
words, it uses the polarimetric feature under the
unoptimized illumination.
• Gu and Liu (Gu and Liu, 2012): This method
optimizes the light source intensities for material
classification on the basis of SVMs. Because the
non-negativity constraints are not imposed on the
light source intensities, it requires two images for
two-class classification, and (K + 1) images for
K-class classification when it combines two-class
classification in a one-vs-the-rest manner. In other
words, it require an additional image for compen-
sating virtual light sources with negative intensi-
ties.
• SegFormer (Xie et al., 2021) with s
0
: SegFormer
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
742
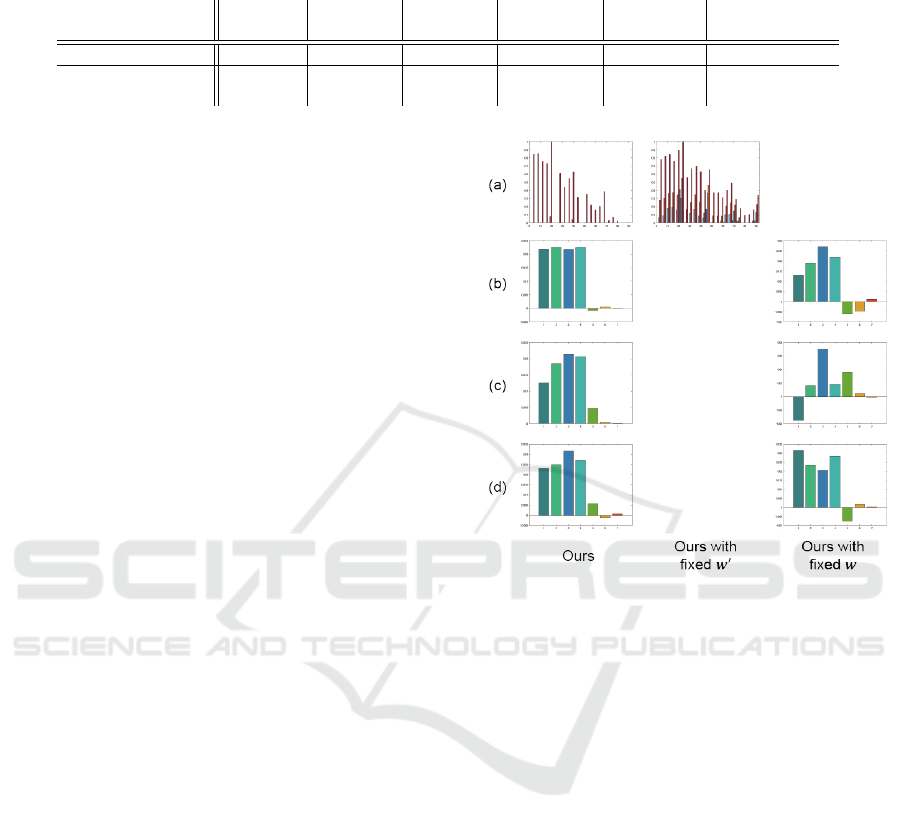
Table 3: The classification accuracies (%) of the four-class classification for (a) the white plastics and (b) the natural woods:
ours, ours with fixed w
w
w
′
, ours with fixed w
w
w, Gu and Liu, SegFormer with s
0
, and SegFormer with (s
0
,s
1
,s
2
) from left to right.
Ours Ours with Ours with Gu and Liu SegFormer SegFormer
fixed w
w
w
′
fixed w
w
w with s
0
with (s
0
,s
1
,s
2
)
Number of images single single single five single single
(a) White plastics 99.88 91.13 94.41 90.72 71.93 68.24
(b) Natural woods 87.91 81.02 72.06 96.49 68.48 68.02
is one of the state-of-the-art methods based on
transformer. To investigate the performance of
the deep learning-based method with intensity im-
ages, the input to SegFormer is the s
0
component
of the Stokes vector when w
w
w = (1, 1, 1, ..., 1)
⊤
.
• SegFormer (Xie et al., 2021) with (s
0
,s
1
,s
2
): To
investigate the performance of the deep learning-
based method with polarimetric images, the input
to SegFormer is the s
1
, s
2
, and s
3
components of
the Stokes vector when w
w
w = (1, 1, 1, ..., 1)
⊤
.
We used the MATLAB implementation (quad-
prog) of the inter-point-convex algorithm for the first
iteration followed by the active-set algorithm (Gill
et al., 1981) for the alternative optimization of eq.(5)
and eq.(10). We empirically set the parameter α in
those equations to 10
6
and 10
5
for the datasets of
white plastics and natural woods respectively. For all
of the above methods, we used 900/2,500 pixels per
plastics/woods material in the test phase. In the train-
ing phase, we used the other 400 pixels per material
for the above methods other than SegFormer.
We used 48 images with 900 pixels/88 images
with 2,500 pixels per plastics/woods material for
training SegFormer. We found that the performance
of SegFormer tends to depend on the initial condi-
tions to some extent. Then, we show the average of
five trials for the results of SegFormer in Section 4.2
and Section 4.3.
4.2 Two-Class Classification
First, in Table 1, we summarize the accuracies of the
two-class classification for the white plastics: ours,
ours with fixed w
w
w
′
, ours with fixed w
w
w, Gu and Liu (Gu
and Liu, 2012), SegFormer (Xie et al., 2021) with
s
0
, and SegFormer with (s
0
,s
1
,s
2
) from left to right.
Note that Gu and Liu requires two input images taken
under different illumination conditions but the other
methods use only a single image per tow-class clas-
sifier in the test phase. We tested the six pairs of the
four plastics: ABS vs. PET, ABS vs. PMMA, ABS
vs. PP, PET vs. PMMA, PET vs. PP, and PMMA vs.
PP from top to bottom.
Basically, we can see that the classification of the
white plastics is relatively easy. Although the accu-
racies are often saturated, we can see that ours works
Figure 3: The optimized parameters for the four-class clas-
sification of the white plastics: Ours, Ours with fixed w
w
w
′
,
and Ours with fixed w
w
w from left to right, and (a) the light
source vector w
w
w and the polarimetric vectors (b) w
w
w
′
1
, (c) w
w
w
′
2
,
and (c) w
w
w
′
3
.
better than ours with fixed w
w
w and Gu and Liu with
two input images. In addition, Table1 also shows that
ours outperforms SegFormer with s
0
and (s
0
,s
1
,s
2
);
it supports the effectiveness of the illumination opti-
mization.
Second, we summarize the accuracies of the two-
class classification for the natural woods in Table 2.
We tested the four pairs of the five natural woods:
Castor Aralia vs. Ginkgo, Cedar vs. Cypress, Cedar
vs. Cherry Blossom, and Cypress vs. Ginkgo from
top to bottom. We can see that our proposed method
works better than the other methods. Since the clas-
sification of the natural woods is more difficult than
the white plastics due to spatially-varying reflectance
properties, the effectiveness of our method is more
significant.
4.3 Multi-Class Classification
First, in Table 3 (a), we summarize the accuracies
of the four-class classification for the white plastics:
One-Shot Polarization-Based Material Classification with Optimal Illumination
743

Figure 4: The optimized parameters for the four-class clas-
sification of the natural woods: Ours, Ours with fixed w
w
w
′
,
and Ours with fixed w
w
w from left to right, and (a) the light
source vector w
w
w and the polarimetric vectors (b) w
w
w
′
1
, (c) w
w
w
′
2
,
and (c) w
w
w
′
3
.
Figure 5: The s
0
image and the labels of the white plastics
predicted by using the 6 methods: (a) PET, (b) PMMA, (c)
PP, and (d) ABS. Red, green, yellow, and blue stand for
PET, PMMA, PP, and ABS respectively.
ours, ours with fixed w
w
w
′
, ours with fixed w
w
w, Gu and
Liu (Gu and Liu, 2012), SegFormer (Xie et al., 2021)
with s
0
, and SegFormer with (s
0
,s
1
,s
2
) from left to
right. Note that Gu and Liu requires five input im-
ages taken under different illumination conditions but
the other methods use only a single image in the test
phase.
Comparing the performance of ours and those of
ours with fixed w
w
w
′
and ours with fixed w
w
w, we can see
the effectiveness of the joint optimization of the light
source vector w
w
w for feature extraction and the polati-
metric vector w
w
w
′
(and the bias b) for the discriminant
hyperplane in the feature space. In addition, we can
Figure 6: The s
0
image and the labels of the natural woods
predicted by using the 6 methods: (a) Cypress, (b) Ginkgo,
(c) Cedar, and (d) Castor Aralia. Red, green, yellow, and
blue stand for Cypress, Ginkgo, Cedar, and Castor Aralia
respectively.
see that ours with a single input image works better
than Gu and Liu with five input images. Table 3 (a)
also shows that ours outperforms SegFormer with s
0
and (s
0
,s
1
,s
2
).
Figure 3 shows the light source vectors and the
polarimetric vectors of ours, ours with fixed w
w
w
′
, and
ours with fixed w
w
w from left to right. We can see that
our light source vector is significantly different from
(1,1,1,...,1)
⊤
, but our polarimetric vector is not so
different from (1/4, 1/4, 1/4, 1/4, 0, 0, 0)
⊤
. There-
fore, for the white plastics, we can see that the opti-
mization of illumination condition is more important
than the use of the polarimetric feature.
Second, we summarize the accuracies of the four-
class classification for the natural woods in Table 3
(b). The four materials are Castor Aralia, Cedar, Cy-
press, and Ginkgo. Similar to the case of the white
plastics, we can see the effectiveness of the joint op-
timization of the light source vector w
w
w and the polati-
metric vector w
w
w
′
(and the bias b), because ours works
better than ours with fixed w
w
w
′
, and ours with fixed
w
w
w. We can also see that ours outperforms SegFormer
with s
0
and (s
0
,s
1
,s
2
). Since the classification of the
natural woods is more difficult than the white plas-
tics due to spatially-varying reflectance properties as
shown in Figure 5 and Figure 6, the effectiveness of
our method is more significant. Note that Gu and Liu
performs best but requires five input images.
Figure 4 shows the light source vectors and the
polarimetric vectors of ours, ours with fixed w
w
w
′
, and
ours with fixed w
w
w from left to right. We can see
that our light source vector and polarimetric vec-
tor are significantly different from (1,1,1,...,1)
⊤
and
(1/4,1/4,1/4,1/4,0,0,0)
⊤
. Therefore, we can see
that both the illumination optimization and the polari-
metric feature are important for classifying the natural
woods.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
744

5 CONCLUSION
In this paper, we proposed a novel method for one-
shot per-pixel material classification based on the
polarimetric clues under the optimal illumination.
Specifically, we show the relationship between the in-
tensities of multi-spectral and multi-directional light
sources and the polarimetric feature, and jointly opti-
mize both the non-negative illumination condition for
feature extraction and the discriminant hyperplane in
the feature space via margin maximization. Then, we
experimentally showed that our method using a single
input image works better than/comparably to the ex-
isting methods using a single/multiple input images.
The future work of this study includes the exten-
sion to complex objects such as non-planar surfaces
and translucent materials with significant subsurface
scattering. The use of the other modalities such as
polarimetric light sources is another direction of our
future work.
ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI
Grant Numbers JP20H00612, JP23H04357, and
JP22K17914.
REFERENCES
Chen, C., Zhao, Y., Luo, L., Liu, D., and Pan, Q. (2009).
Robust materials classification based on multispectral
polarimetric brdf imagery. In SPIE Proceedings, vol-
ume 7384, pages 220–227.
Chen, H. and Wolff, L. (1998). Polarization phase-based
method for material classification in computer vision.
IJCV, 28(1):73–83.
Ghosh, A., Achutha, S., Heidrich, W., and O’Toole, M.
(2007). BRDF acquisition with basis illumination. In
Proc. IEEE ICCV2007, pages 1–8.
Gill, P., Murray, W., and Wright, M. (1981). Practical Op-
timization. Academic Press.
Gu, J. and Liu, C. (2012). Discriminative illumination:
per-pixel classification of raw materials based on op-
timal projections of spectral BRDF. In Proc. IEEE
CVPR2012, pages 797–804.
Ibrahim, A., Tominaga, S., and Horiuchi, T. (2010). Spec-
tral imaging method for material classification and in-
spection of printed circuit boards. Optical Engineer-
ing, 49(5):057201.
Ichikawa, T., Fukao, Y., Nobuhara, S., and Nishino, K.
(2023). Fresnel microfacet BRDF: Unification of
polari-radiometric surface-body reflection. In Proc.
IEEE/CVF CVPR2023, pages 16489–16497.
Kondo, Y., Ono, T., Sun, L., Hirasawa, Y., and Murayama,
J. (2020). Accurate polarimetric BRDF for real polar-
ization scene rendering. In Proc. ECCV2020, pages
220–236.
Liang, Y., Wakaki, R., Nobuhara, S., and Nishino, K.
(2022). Multimodal material segmentation. In Proc.
IEEE/CVF CVPR2022, pages 19800–19808.
Liu, C. and Gu, J. (2014). Discriminative illumination: per-
pixel classification of raw materials based on optimal
projections of spectral BRDF. IEEE Trans. PAMI,
36(1):86–98.
Ma, W.-C., Hawkins, T., Peers, P., Chabert, C.-F., Weiss,
M., and Debevec, P. (2007). Rapid acquisition of spec-
ular and diffuse normal maps from polarized spheri-
cal gradient illumination. In Proc. EGSR2007, pages
183–194.
Park, J.-I., Lee, M.-H., Grossberg, M., and Nayar, S. (2007).
Multispectral imaging using multiplexed illumination.
In Proc. IEEE ICCV2007, pages 1–8.
Pernkopf, F. and O’Leary, P. (2003). Image acquisition
techniques for automatic visual inspection of metallic
surfaces. NDT&E International, 36:609–617.
Schechner, Y., Nayar, S., and Belhumeur, P. (2003). A
theory of multiplexed illumination. In Proc. IEEE
ICCV2003, pages 808–815.
Shurcliff, W. (1962). Polarized Light: Production and Use.
Harvard University Press.
Tominaga, S. and Okamoto, S. (2003). Reflectance-based
material classification for printed circuit boards. In
Proc. IEEE ICIAP2003, pages 238–244.
Vapnik, V. (1998). Statistical Learning Theory. Wiley-
Interscience.
Wang, C. and Okabe, T. (2017). Joint optimization of
coded illumination and grayscale conversion for one-
shot raw material classification. In Proc. BMVC2017.
Wolff, L. (1990). Polarization-based material classifica-
tion from specular reflection. IEEE Trans. PAMI,
12(11):1059–1071.
Xie, E., Wang, W., Yu, Z., Anandkumar, A., Alvarez, J.,
and Luo, P. (2021). SegFormer: Simple and efficient
design for semantic segmentation with transformers.
In Proc. NeurIPS2021, pages 12077–12090.
Zheng, H., Kong, L., and Nahavandi, S. (2002). Automatic
inspection of metallic surface defects using genetic al-
gorithms. Journal of Materials Processing Technol-
ogy, 125–126:427–433.
One-Shot Polarization-Based Material Classification with Optimal Illumination
745
