
Optimization of Link Configuration for Satellite Communication Using
Reinforcement Learning
Tobias Rohe
1 a
, Michael K
¨
olle
1 b
, Jan Matheis
2
, R
¨
udiger H
¨
opfl
2
, Leo S
¨
unkel
1 c
and Claudia Linnhoff-Popien
1 d
1
Mobile and Distributed Systems Group, LMU Munich, Germany
2
Airbus Defence and Space, Germany
fi
Keywords:
Satellite Communication, Optimization, Link Configuration, PPO Algorithm, Reinforcement Learning.
Abstract:
Satellite communication is a key technology in our modern connected world. With increasingly complex
hardware, one challenge is to efficiently configure links (connections) on a satellite transponder. Planning an
optimal link configuration is extremely complex and depends on many parameters and metrics. The optimal
use of the limited resources, bandwidth and power of the transponder is crucial. Such an optimization problem
can be approximated using metaheuristic methods such as simulated annealing, but recent research results also
show that reinforcement learning can achieve comparable or even better performance in optimization methods.
However, there have not yet been any studies on link configuration on satellite transponders. In order to close
this research gap, a transponder environment was developed as part of this work. For this environment, the
performance of the reinforcement learning algorithm PPO was compared with the metaheuristic simulated
annealing in two experiments. The results show that Simulated Annealing delivers better results for this static
problem than the PPO algorithm, however, the research in turn also underlines the potential of reinforcement
learning for optimization problems.
1 INTRODUCTION
In today’s world, satellite communication is a piv-
otal technology, utilized across a broad spectrum of
modern applications. While terrestrial communica-
tion systems depend on conventional infrastructure
that is often vulnerable to disruptions, satellite com-
munication has consistently demonstrated high reli-
ability. This reliability becomes especially crucial
in scenarios such as natural disasters, where large-
scale power outages often occur. In such cases, satel-
lite systems are vital for maintaining communication
channels .To further enhance the reliability and effi-
ciency of satellite communication, reducing disrup-
tion, and optimize bandwidth usage, artificial intelli-
gence (AI) is increasingly being employed (V
´
azquez
et al., 2020).
A critical factor in the performance of satellite
communication networks is determining the optimal
a
https://orcid.org/0009-0003-3283-0586
b
https://orcid.org/0000-0002-8472-9944
c
https://orcid.org/0009-0001-3338-7681
d
https://orcid.org/0000-0001-6284-9286
link configuration of the satellite transponder — an
inherently complex optimization problem. The opti-
mal configuration of these links changes dynamically
as links are terminated or added. This dynamic na-
ture introduces the potential of reinforcement learning
(RL) as a method to optimize the link configuration.
By leveraging learned metrics and the ability to
generalize, a RL approach could offer faster and su-
perior outcomes compared to traditional metaheuris-
tic approaches. In this paper, we model a satellite
transponder environment and illustrate how a mean-
ingful action and observation space can be defined for
this purpose. Since modeling the dynamic aspects of
this problem exceeds the scope of this work, we have
chosen a static approach. In this context, static refers
to finding the best possible link configuration for a
restricted number of links with predetermined param-
eter configurations. Building upon previous research,
where RL has achieved equal or better results than
metaheuristics for static optimization problems (Klar,
Glatt, and Aurich, 2023), we extend this investigation
to the specific optimization problem of link configu-
ration in satellite transponders.
The remainder of the paper is structured as fol-
704
Rohe, T., Kölle, M., Matheis, J., Höpfl, R., Sünkel, L. and Linnhoff-Popien, C.
Optimization of Link Configuration for Satellite Communication Using Reinforcement Learning.
DOI: 10.5220/0013313000003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 704-713
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

lows: Section 2 provides an overview of the back-
ground relevant to the study, followed by a discussion
of related work in Section 3. In Section 4, we present
our proposed approach for optimizing the link con-
figuration. The experimental setup is detailed in Sec-
tion 5, and the results of the experiments are discussed
in Section 6. Finally, Section 7 concludes the paper
and outlines potential directions for future research.
2 BACKGROUND
2.1 Reinforcement Learning
Machine learning is a subfield of artificial intelli-
gence, which can be further broken down into three
categories: supervised learning, unsupervised learn-
ing, and reinforcement learning (RL). RL is particu-
larly well-suited for addressing sequential decision-
making problems, such as those encountered in chess
or in the game AlphaGo (Deliu, 2023), where signif-
icant successes were achieved in recent years (Silver
et al., 2018). In RL, an agent learns a policy π by in-
teracting with an environment through trial and error,
with the goal of making optimal decisions. The two
main components in RL are the environment and the
agent. The environment is often modeled as a sim-
ulation of the real world, as an agent interacting di-
rectly with the real environment may be infeasible,
too risky or too expensive (Prudencio, Maximo, and
Colombini, 2023).
The foundation of RL lies in the Markov Deci-
sion Process (MDP). In an MDP, the various states of
the environment are represented by states in the pro-
cess. At any given time t, the agent occupies a state
S
t
. From this state, the agent can select from various
actions to transition to other states. Thus, the system
consists of state-action pairs, or tuples (A
t
, S
t
). When
the agent selects an action A
t
and executes it in the
environment, the agent receives feedback. This feed-
back includes an evaluation of the performed action
in the form of a reward, and the new state S
t+1
of the
environment. The reward may be positive or negative,
representing either a benefit or a penalty. The agent’s
objective is to maximize the accumulated reward, as
shown in Equation 1.
π
∗
= arg max
π
E
"
H
∑
t=0
γ
t
· R(s
t
, a
t
)
#
(1)
A major challenge in finding the optimal policy
π
∗
is the balance between exploration and exploita-
tion. Exploration refers to the degree to which the
agent explores the environment for unknown states,
while exploitation refers to the degree to which the
agent applies its learned knowledge to achieve the
highest possible reward. At the start of training, the
agent should focus more on exploring the environ-
ment, even if this means not always selecting the ac-
tion that yields the highest immediate reward (i.e.,
avoiding a greedy strategy). This approach allows the
agent to gain a more comprehensive understanding
of the environment and, ultimately, develop a better
policy. As the learning process progresses, the agent
should shift towards exploiting its knowledge more
and exploring less.
In RL, there is a distinction between model-based
and model-free approaches. In model-free RL, the
agent directly interacts with the environment and re-
ceives feedback. The environment may be a real-
world environment or a simulation. In contrast, in
model-based RL, the agent also interacts with the en-
vironment, but it can update its policy using a model
of the environment. In addition to standard RL, there
exists an advanced method called deep reinforcement
learning (deep RL). In deep RL, neural networks
are used to approximate the value function ˆv(s;θ) or
ˆq(s, a;θ) of the policy π(a | s; θ) or the model. The
parameter θ represents the weights of the neural net-
work. The use of neural networks enables the learn-
ing of complex tasks. During training, the connec-
tions between neurons, also called nodes, are dynam-
ically adjusted (weighted) to improve the quality of
the function approximation.
3 RELATED WORK
Metaheuristics are commonly applied to optimization
problems and frequently yield efficient near-optimal
solutions in complex environments. A promising
alternative to these traditional approaches are RL-
algorithms, whose potential in the context of opti-
mization problems has already been scientifically ex-
plored (T. Zhang, Banitalebi-Dehkordi, and Y. Zhang,
2022; Ardon, 2022; Li et al., 2021). Studies such
as (Klar, Glatt, and Aurich, 2023) and (Mazyavk-
ina et al., 2021) demonstrate that RL-algorithms can
achieve results similar to or even superior to those ob-
tained by standard metaheuristics. This applies to a
variety of optimization problems, including the Trav-
eling Salesman Problem (TSP) (Bello et al., 2016),
the Maximum Cut (Max-Cut) problem, the Minimum
Vertex Cover (MVC) problem, and the Bin Packing
Problem (BPP) (Mazyavkina et al., 2021).
While the work by (Klar, Glatt, and Aurich, 2023)
does not focus on the arrangement of links on a
transponder, it focuses on the planning of factory
Optimization of Link Configuration for Satellite Communication Using Reinforcement Learning
705
layouts, which is also a static optimization problem.
This study compares a RL-based approach with a
metaheuristic approach and examines which method
proves more effective. The research highlights RL’s
capability to learn problem-specific application sce-
narios, making it an intriguing alternative to conven-
tional methods. Given the uniqueness of each prob-
lem and the limited amount of scientific research on
this specific topic, individual consideration and anal-
ysis of each problem type are essential, which is also
goal of this research.
4 APPROACH
4.1 System Description
In satellite communication, ground stations are re-
sponsible for sending and receiving data. The data
is transmitted from the sending ground station to the
satellite via communication links, also referred to as
links or carriers, and then relayed from the satellite to
the receiving ground station via another link. On the
satellite itself, the links pass through chains of devices
known as transponders. Incoming signals are received
by an antenna on the satellite, amplified, converted in
frequency, and retransmitted through the antenna. A
transponder is a component within a satellite that re-
ceives signals transmitted from a ground station, am-
plifies them with a specific amplification factor using
the available power, changes their frequency to avoid
interference, and then retransmits the signals back to
Earth. This process enables the efficient transmission
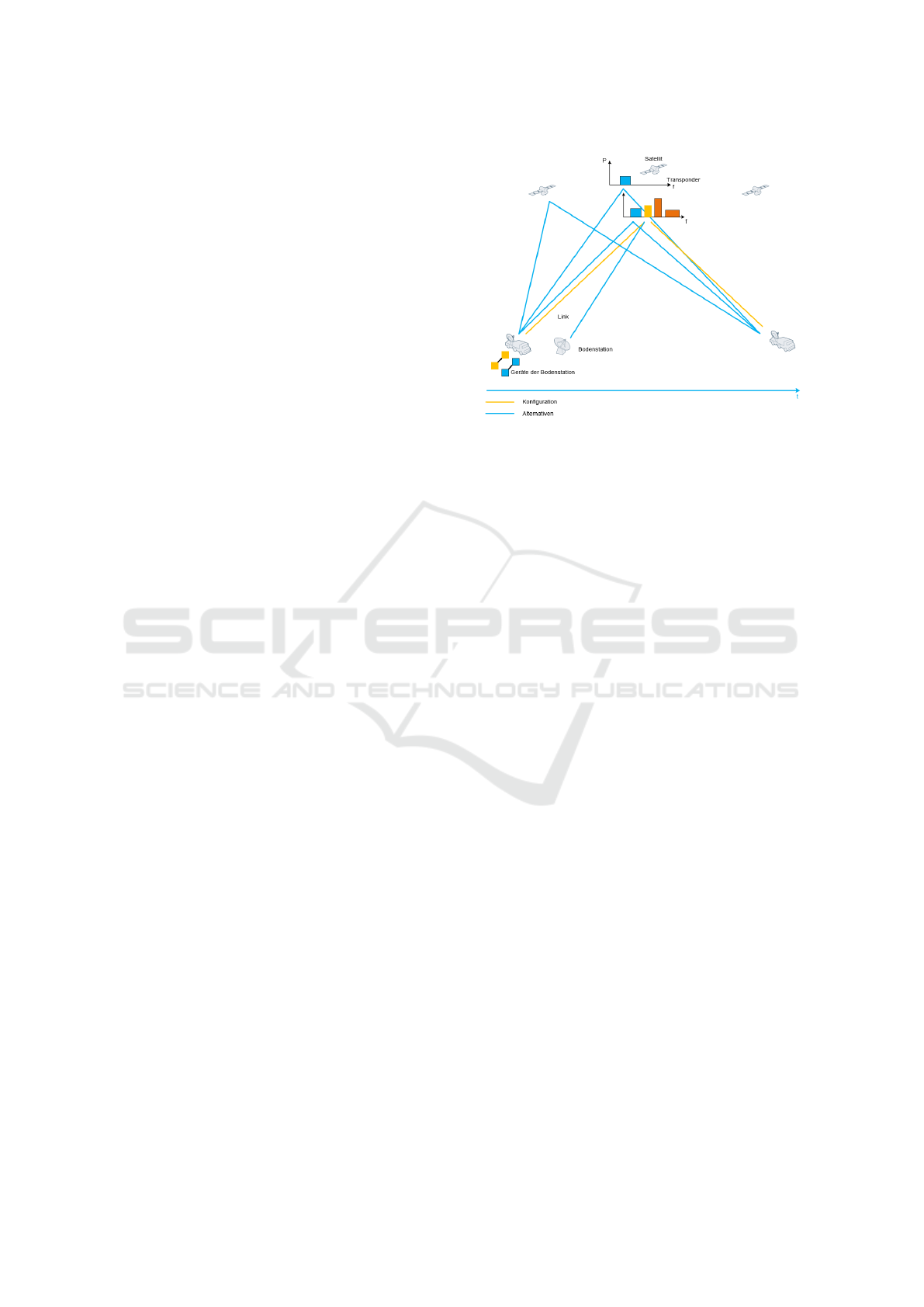
of information across vast distances in space. Figure
1 illustrates the path of the links as they move from
one ground station through the satellite’s transponder
to another ground station, facilitating data transmis-
sion.
However, each transponder has limited resources
in terms of bandwidth and power. It is crucial that the
links are configured to consume as few resources as
possible. A link is characterized by several parame-
ters, such as data rate, MOD-FEC combination (Mod-
ulation and Forward Error Correction), bandwidth,
and EIRP (Effective Isotropic Radiated Power). To
ensure the data is transmitted with sufficient quality,
a minimum performance level must be maintained for
each link. The challenge lies in selecting the opti-
mal parameters for each link so that they use the least
possible resources on the transponder while maintain-
ing the required communication quality. This task is
further complicated because the bandwidth is a func-
tion of various other parameters. In the scenario con-
sidered here, a fixed number of links are established
Figure 1: Illustration of Satellite Communication.
through which data is transmitted. Once the transmis-
sion is complete, all links are simultaneously taken
down.
4.2 Systemparameters
The following section outlines the process of estab-
lishing a satellite connection. To set up a link from a
ground station to a satellite, various parameters must
be carefully combined. The choice of these param-
eters determines how efficiently the links can be ar-
ranged on the satellite transponder, minimizing the
consumption of transponder resources, specifically
EIRP and bandwidth.
One key parameter is the EIRP, which represents
the power used to establish the link. Each link re-
quires a certain EIRP to ensure that the transmitted
data arrives with the desired quality. The necessary
EIRP depends on the data rate to be transmitted. The
data rate, typically measured in bits per second (bps),
indicates how much data can be transmitted per unit
of time and plays a crucial role in determining the re-
quired bandwidth.
The MOD-FEC combination is another essential
parameter. Modulation (MOD) is the process of con-
verting data into an electrical signal (electromagnetic
wave) for transmission, where characteristics of the
wave—such as amplitude, frequency, or phase—are
adjusted to encode the data. Forward Error Correction
(FEC) enables error detection and correction without
the need for retransmission, by adding correction in-
formation. The combination of modulation and FEC
greatly influences transmission efficiency, especially
in environments where interference is likely. Vari-
ous valid MOD-FEC combinations are available for
the transmission of a link, typically determined by the
hardware in use.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
706

Another important parameter is bandwidth, which
describes the ability of a communication channel or
transmission medium to transmit data over a specified
time period. Measured in Hertz (Hz), bandwidth di-
rectly influences transmission speed. In satellite com-
munication, bandwidth refers to the frequency range
over which a signal is transmitted. Both the data rate
and the MOD-FEC combination influence the deter-
mination of the bandwidth. To compute the band-
width, several parameters are required: FEC, MOD,
OH factor, RS factor, overhead, spacing factor, roll-
out factor, and the data rate. To simplify the model
of the environment, fixed values were assigned to the
OH factor, RS factor, overhead, spacing factor, and
rollout factor. These parameters do not play a role in
the subsequent experiment but were included in the
calculation for the sake of completeness.
Calculating the bandwidth of a link involves three
steps. First, the transmission rate
¨
UR is calculated by
multiplying the parameters data rate, OH factor, RS
factor, and FEC. This is shown in Equation 2.
¨
UR = data rate ∗ OHFactor ∗ RSFactor ∗ FEC (2)
The transmission rate is then multiplied by the
MOD, resulting in the symbol rate (SR).
SR =
¨
UR ∗ MOD (3)
Finally, the SR is multiplied by the Rollout Factor
and the Spacing Factor to obtain the bandwidth of a
link.
Bandwidth = SR ∗ Rollout Factor ∗ Spacing Factor
(4)
The last important parameter is the center fre-
quency, which determines the position of the links on
the transponder.
Link configuration is usually carried out manually
with the support of software applications. However,
this is not an optimal procedure, as the ideal solution
is rarely found and therefore does not save resources.
In addition, the link configuration has to be calculated
manually each time.
4.3 Action and Observation Space
In RL, the action space represents the set of all pos-
sible actions that an agent can perform within an en-
vironment. The agent responds to received observa-
tions by choosing an action. To analyze how different
action spaces affect performance, two distinct action
spaces were defined.
The first action space (Action Space 1) was de-
fined using a nested dictionary from the Gymnasium
framework (gymnasium.spaces.Dict). This dictionary
contains three sub-dictionaries, each representing a
link. Each link dictionary includes the parameters
MOD-FEC combination, center frequency, and EIRP.
Both EIRP and center frequency are continuous val-
ues, so a float value between 0 and 1 is selected at
each step within the environment. The MOD-FEC
combination, however, is a discrete value. A distinc-
tive feature of Action Space 1 is that all parameters
can be selected for any link at each step, allowing the
parameters to be reset at every action.
The second action space (Action Space 2) adopts
a different approach. Similar to Action Space 1, the
number of links is fixed at exactly three. However,
the action space is represented as a 4-tuple (link, pa-
rameter, continuous, discrete). In this setup, a spe-
cific parameter is chosen for a link, and the value of
that parameter is modified. As with Action Space
1, EIRP and center frequency are continuous values,
while the MOD-FEC combination is represented by
discrete values.
The observation space in RL represents the set of
all possible states or information transmitted from the
environment to the agent. It contains all the neces-
sary information to reconstruct the current state of the
environment, including details about the link configu-
rations on the transponder. For each link, the observa-
tion space includes the parameters: center frequency,
EIRP, MOD-FEC combination, and Link Bandwidth
Percentage. The Link Bandwidth Percentage repre-
sents the portion of the transponder’s bandwidth allo-
cated to a particular link. This is calculated by divid-
ing the bandwidth of the link by the total transponder
bandwidth. The observation space remains consistent
for both Action Space 1 and Action Space 2.
4.4 Simplifications
In the experiments conducted, the task was simplified
in several aspects to facilitate the learning process.
Specifically, the transponder environment was simpli-
fied. For instance, the possible MOD-FEC combina-
tions were restricted, and the modeling of the links in
the frequency domain was simplified, excluding the
interference of electromagnetic waves (links) which
normally affect communication quality.
Additionally, simplifications were made regarding
the inherently dynamic nature of the problem. Cur-
rently, a Proximal Policy Optimization (PPO) model
can only be trained for a fixed number of links defined
prior to training, which represents a static rather than
dynamic scenario. In our experiments, a PPO model
was trained exclusively for three links, and dynamic
changes — such as the addition or termination of links
Optimization of Link Configuration for Satellite Communication Using Reinforcement Learning
707
— were not accounted for. The current environment
model is configured so that each link can be assigned
one of three possible MOD-FEC combinations, and
the data rate for each link is set to a uniform value.
Future iterations of the model will progressively
address these simplifications to handle the more com-
plex tasks encountered in real-world scenarios.
5 EXPERIMENTAL SETUP
Two experiments were conducted, differing only in
the configuration of the RL model. The PPO al-
gorithm was utilized in both models, with the only
distinction being the action space, as explained in
Chapter 4.3. For both experiments, Python (version
3.8.10), PyTorch (version 1.13.1), Gymnasium (ver-
sion 0.28.1), and Ray RLlib (version 0.0.1) were used.
5.1 PPO Algorithm
The PPO model serves as the baseline against which
the Random Action and Simulated Annealing base-
lines are compared in terms of performance. A neu-
ral network was used to implement the PPO, tasked
with calculating the policy parameters. The neural
network topology consisted of the observation space
as the input layer, followed by two hidden layers with
256 neurons each, and the action space as the output
layer. The learning rate for the PPO model was op-
timized, with further details provided in the section
”Training Process”. The hyperparameters are shown
in Table 1.
Table 1: PPO Algorithm Hyperparameter Configuration.
Parameter Datatype Value
Discount Factor Float 0.99
Batch Size Integer 2000
Clipping Range Float 0.3
GAE Lambda Float 1.0
Entropy coeff Float 0.0
Number of SGD Integer 30
Minibatchsize Integer 128
5.2 Random Action Strategy
The na
¨
ıve random action strategy, which is compared
with the PPO, consists of choosing actions purely at
random. We define a fundamental learning success
here if the PPO model achieves better results than the
random action model.
5.3 Simulated Annealing
Simulated annealing follows a structured process: Ini-
tially, the algorithm is provided with a randomly gen-
erated action. This action is evaluated by the cost
function, which in this case is represented by the step
function of the environment. The corresponding re-
ward for the action is calculated. Next, the neighbor
function generates a new action. If the reward of the
new action is better than that of the previous action,
it is accepted as the new action. However, if the re-
ward is lower, the new action is not immediately dis-
carded. An additional mechanism, known as temper-
ature, plays a key role in determining the probability
of selecting a worse action as the new action.
At the beginning of the algorithm, the temperature
is high, leading to a higher probability of choosing a
worse action. This facilitates broader exploration in
the search for the global optimum. As the algorithm
progresses, the temperature decreases gradually. As
the temperature lowers, the probability of accepting
a worse action diminishes, leading to a more focused
search for the local optimum and enabling fine-tuning
of the solution.
Table 2: Simulated Annealing Hyperparameter Configura-
tion.
Parameter Datatype Value
Tries Integer 0.99
Max Step Integer 2000
T min Integer 0
T max Integer 100
Damping Float 0.0
Alpha Float 30
5.4 Metrics
The metric for evaluating link configuration on the
satellite transponder is the total reward, which reflects
the learning behavior of the model. This total re-
ward comprises eight metrics, each linked to specific
conditions in the link configuration. The metrics are
detailed below along with their calculation methods.
They are categorized into Links Reward (LR) and
Transponder Reward (TR), contributing 70% (0.7)
and 30% (0.3) to the total reward, respectively. In-
dividual metrics can be weighted to emphasize more
challenging metrics (through the parameters ω, θ, φ,
µ, β, ε, ψ, ρ), potentially enhancing policy learning
for the PPO agent. However, the impact of different
weightings was not explored in this study.
Links reward metrics include Overlap Reward,
On Transponder Reward, PEB Reward, and Mar-
gin Reward, which pertain to each link individually.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
708

Since multiple links are typically configured on the
transponder, the link reward is divided by the num-
ber of links to represent the reward per link-weight
(RpL). This share, multiplied by the Individual Link
Reward for each link, contributes to the total reward
(see Equation 9). Metrics for each link are:
• Overlap Reward (OR): Checks if the selected link
does not overlap with other links in terms of band-
width. A reward of 1 is given if met; otherwise,
0.
OR = RpL × ω × or (5)
• On Transponder Reward (OTR): Verifies whether
the link’s bandwidth is fully on the transponder. If
met, the reward is 1; if not, 0.
OTR = RpL × θ ×tr (6)
• PEB Reward (PEBR): Assesses the appropriate-
ness of the power-to-bandwidth ratio for the link.
A reward of 1 is given if met; otherwise, 0.
PEBR = RpL × φ × pebr (7)
• Margin Reward (MR): Evaluates the EIRP of the
link. If it is below the minimum required for high-
quality transmission, no reward is given. If ex-
actly at the minimum, the reward is 1. If above,
the reward decreases as the EIRP exceeds the min-
imum.
MR = RpL × µ × mr (8)
Individual Link Reward =
∑
(OR + OTR + PEBR + MR)
(9)
TR metrics relate to all links or the system as a
whole, it includes:
• Bandwidth Reward (BR): Measures the ratio of
the sum of link bandwidths to the transponder
bandwidth. The PPO agent should learn that this
sum must not exceed the transponder bandwidth.
A reward of 1 is given if met; otherwise, 0.
BR = TR × β (10)
• EIRP Reward (ER) : Assesses the ratio of total
link EIRP to transponder EIRP. The PPO agent
should learn that the sum of link EIRPs must not
exceed the transponder EIRP to avoid overload-
ing. A reward of 1 is given if met; otherwise, 0.
ER = TR × ε (11)
• Packed Reward (PR):This metric measures the
utilization of overlapping frequency ranges for
links on the transponder. A reward is given based
on how well the overlapping frequencies are man-
aged, encouraging configurations that maximize
frequency usage without excessive interference.
PR = TR × ψ (12)
• Free Resource Reward (FRR): This metric evalu-
ates the amount of unused or free resources (e.g.,
bandwidth or power) on the transponder. It likely
rewards configurations that conserve resources,
promoting efficient use of the transponder’s lim-
ited capabilities.
FRR = TR × ρ (13)
Transponder Reward =
∑
(BR + ER + PR + FRR)
(14)
5.5 Training Process
Before initiating the experiments, the learning rate
for the PPO was examined through a grid search.
For the first experiment, the grid search included val-
ues of 1e − 3, 5e − 4, 1e − 4, 5e − 5, and 1e − 5.
Each learning rate was evaluated using three differ-
ent seeds. Across all runs, 2, 000, 000 steps were ex-
ecuted in the transponder environment, maintaining a
consistent batch size of 2, 000 for comparability. Each
episode consisted of 10 steps, serving as the termina-
tion criterion, resulting in a total of 200, 000 episodes.
The best performance was obtained with a learning
rate of 1e − 5. This learning rate was subsequently
used for Experiment 1.
A similar grid search was performed for the sec-
ond experiment, with learning rate values set at 1e−3,
1e−4, and 1e −5. Each learning rate was again tested
with three different seeds. For all runs, 1, 000, 000
steps were carried out in the transponder environment,
with a batch size of 2, 000. Episodes consisted of 100
steps. Also for Experiment 2, a learning rate of 1e −5
yielded the best performance.
6 RESULTS
6.1 Experiment 1
The objective of the first experiment was to determine
an optimal link configuration for three links within
the transponder environment, ensuring that the band-
width and EIRP resources of the satellite transponder
were conserved. To address this optimization prob-
lem, the three algorithms — PPO, Simulated Anneal-
ing, and Random Action — were implemented in the
transponder environment. The experiment aimed to
evaluate whether a trained PPO model could achieve
higher performance compared to the Simulated An-
nealing algorithm. Action Space 1 was used in the
environment for this experiment.
Optimization of Link Configuration for Satellite Communication Using Reinforcement Learning
709
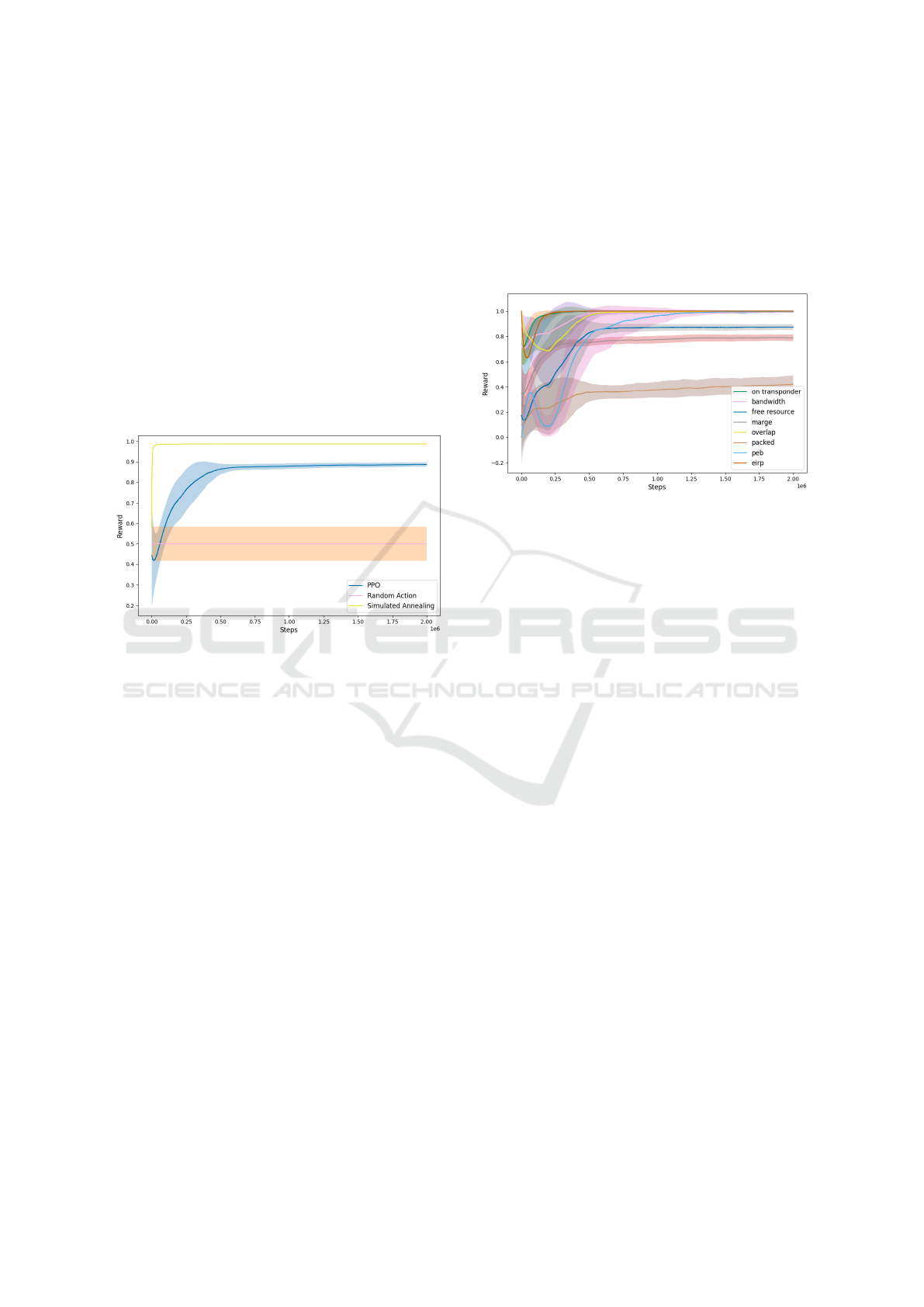
Figure 2 illustrates the training of the PPO model
over 2, 000, 000 steps, compared to the Simulated An-
nealing and Random Action baselines. Each PPO
episode consisted of 10 steps. To enhance visualiza-
tion, all curves were smoothed. Training for the PPO
model and the computation of the comparative base-
lines were conducted with five different seeds (0 to 4).
The figure presents the average performance across
these runs, including the standard deviation for each
algorithm. The maximum achievable value is 1. It
is noteworthy that only the PPO model was trained,
as neither the Simulated Annealing algorithm nor the
Random Action model can be trained. These base-
lines were plotted to provide a benchmark for assess-
ing the PPO’s performance.
Figure 2: Comparison PPO, Simulated Annealing and Ran-
dom Action. The x-axis represents the training steps; the
y-axis shows the achieved Reward.
Both the Simulated Annealing and Random Ac-
tion models were run for 2,000,000 steps. As ex-
pected, the Random Action model showed the lowest
performance, maintaining an average value of 0.496
across all steps. The PPO model started at a similar
value, which is typical as no policy has been learned
at the initial stage. The policy improved continu-
ously over the steps, as indicated by an increase in re-
ward, with most adjustments occurring within the first
500, 000 steps. After this, the PPO curve gradually
converged to just below 0.9, indicating that an effec-
tive policy had been learned. The Simulated Anneal-
ing algorithm demonstrated the highest performance,
rapidly reaching a value just under 1 within the first
20, 000 steps and converging toward 1 thereafter.
Figure 3 depicts the learning behavior of the PPO
model for the individual metrics that collectively con-
tribute to the total reward. These metrics represent
conditions that should be met, as explained in Sec-
tion 5.4. The On Transponder Reward, EIRP Reward,
Overlap Reward, PEB Reward, and Bandwidth Re-
ward metrics were effectively learned by the PPO,
each reaching the maximum value of 1. A second
group of metrics, including Packed Reward, Free Re-
source Reward, and Margin Reward, showed slower
learning progress and had not reached their maxi-
mum values by the end of training. The slight upward
trend of these curves at the end of training suggests
that additional training could further improve the PPO
model’s performance.
Figure 3: Development of Rewards under the PPO algo-
rithm Training. The learning behavior of the PPO with re-
gards to the various reward components is illustrated. The
steps are printed on the x-axis, the reward on the y-axis.
To evaluate the performance of the PPO model
finally, the trained PPO model, the Simulated An-
nealing model, and the Random Action model were
applied to unseen observations, referred to as infer-
ence. Unlike the training phase, the PPO does not re-
fine its policy during this step but applies the learned
policy. Five seeds (0–4) were used for evaluation.
In each run, five different random observations were
generated for the configuration of three links. Dur-
ing an episode, the PPO model’s task was to config-
ure the links optimally. Each episode consisted of 10
steps, with the PPO applying its policy learned over
2, 000, 000 training steps.
The Random Action model achieved an average
value of 0.496. The Simulated Annealing model
reached a value of 0.988, requiring 2, 000, 000 steps
to do so. However, as shown in Figure 2, only
20, 000 steps would have been sufficient, as the Sim-
ulated Annealing model’s performance converged to-
ward 1 from that point onward. Detailed results of
the first experiment are provided in Table 3. The
evaluation demonstrates that the Simulated Annealing
model achieved the best performance, with a value of
0.988. The PPO model also performed well, achiev-
ing a value of 0.875. It is noteworthy that the opti-
mization of the PPO model only considered the learn-
ing rate through a grid search, while other potentially
beneficial hyperparameters were not explored.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
710
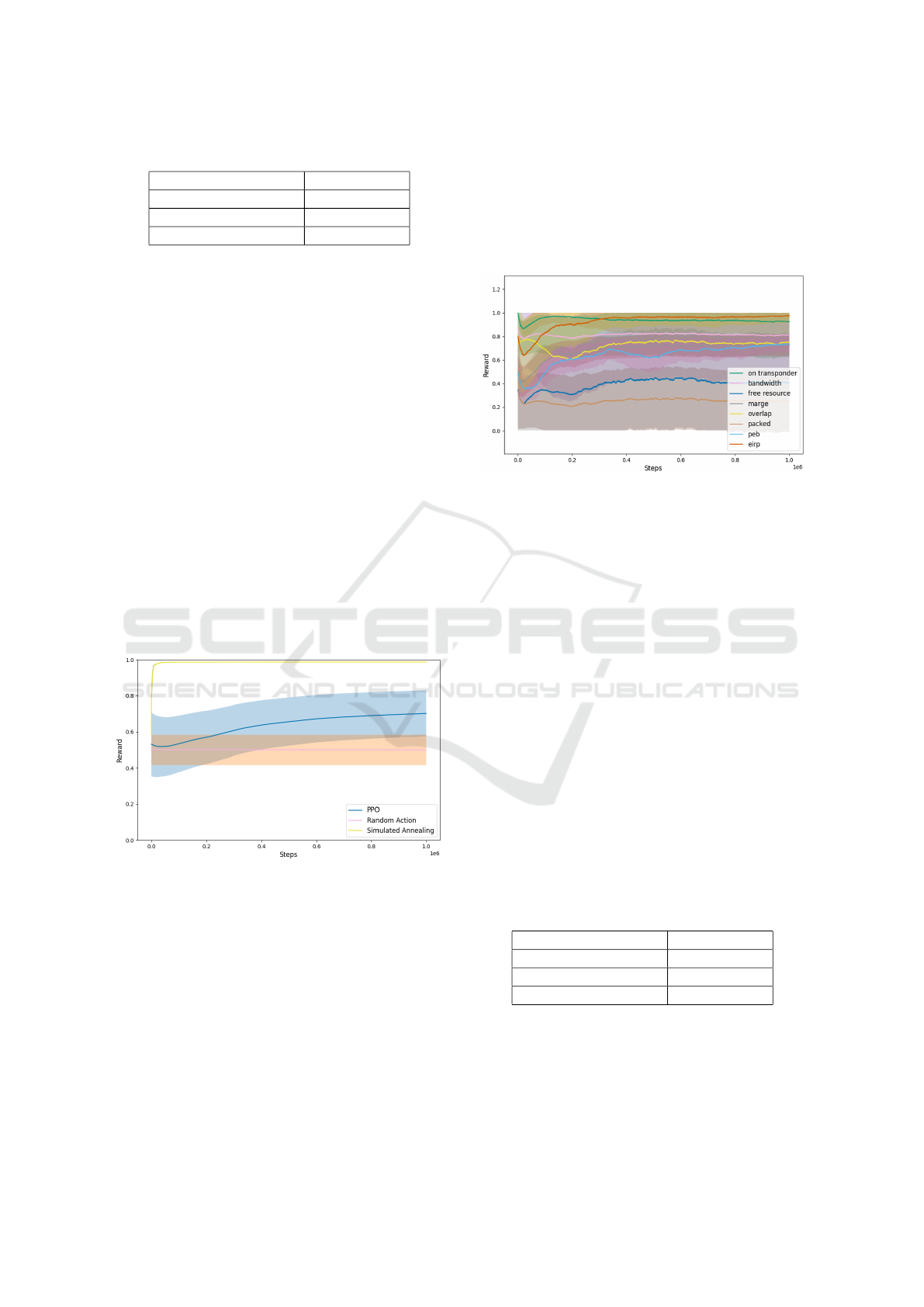
Table 3: Experiment 1: Inference.
Algorithmus Reward
PPO (Action Space 1) 0.875 ± 0.007
Simulated Annealing 0.988 ± 0.001
Random Action 0.496 ± 0.004
6.2 Experiment 2
Experiment 2 differs from Experiment 1 in that it uses
Action Space 2, defined such that a parameter value
can be modified from a link in a single step. The pa-
rameters available for modification include center fre-
quency, EIRP, and the MOD-FEC combination. As in
Experiment 1, PPO was compared with the Simulated
Annealing and Random Action baselines. The se-
lected learning rate for PPO was 1e−5, as this yielded
the best performance during the grid search for Action
Space 2.
Figure 4 illustrates the training process for Ex-
periment 2, where the PPO model was trained over
1, 000, 000 steps, with each episode comprising 100
steps. The Simulated Annealing and Random Ac-
tion baselines were also executed for 1, 000, 000 steps.
The graphs for Simulated Annealing and Random Ac-
tion are identical to those in Experiment 1. As shown,
the most significant adjustments in PPO occur during
the first 200, 000 training steps.
Figure 4: Comparison PPO, Simulated Annealing and Ran-
dom Action. The x-axis represents the training steps; the
y-axis shows the achieved Reward.
Subsequently, the PPO curve converges toward a
value of approximately 0.7, suggesting that the opti-
mization problem may be somewhat too complex for
the defined Action Space 2. Given that the PPO curve
in Figure 4 continues to rise slowly, further training
could potentially enhance the PPO model’s perfor-
mance. However, the individual metrics contributing
to the Total Reward metric are less well-learned with
Action Space 2 compared to Action Space 1, as indi-
cated in Figure 5. The EIRP Reward is the only met-
ric fully learned, while the other metrics learn more
slowly or converge at different levels after brief train-
ing. The Figure suggests that extended training could
improve the total reward, although it remains uncer-
tain how much the PPO model can improve, given
that a significant number of metrics are not effectively
learned by the policy.
Figure 5: Development of Rewards under the PPO algo-
rithm Training. The learning behavior of the PPO with re-
gards to the various reward components is illustrated. The
steps are printed on the x-axis, the reward on the y-axis.
Also for the second experiment, the models were
evaluated on unseen data. As in Experiment 1, the
Simulated Annealing algorithm achieved the best per-
formance. The PPO model reached a value of 0.786,
performing worse than the Simulated Annealing al-
gorithm. However, since the PPO model’s value was
notably higher than that of the Random Action model,
it can be inferred that the PPO model had effectively
learned.
The lower performance of the PPO model com-
pared to Experiment 1 could be attributed to the ac-
tion space implementation not sufficiently capturing
the complexity of the problem. As discussed, the re-
sults of Experiment 2 should be considered an ini-
tial assessment. Further improvements in perfor-
mance could be achieved by adjusting hyperparam-
eters, modifying the weighting of the action space
metrics, or employing reward shaping or curriculum
learning.
Table 4: Experiment 2: Inference.
Algorithmus Reward
PPO (Action Space 2) 0.786 ± 0.104
Simulated Annealing 0.988 ± 0.001
Random Action 0.496 ± 0.004
6.3 Interpretation
The results achieved with Action Space 1 are supe-
rior to those obtained with Action Space 2. One pos-
sible explanation for this is that, during training, the
Optimization of Link Configuration for Satellite Communication Using Reinforcement Learning
711

randomly generated actions in Action Space 1 evenly
scan the action space. In contrast, with Action Space
2, certain regions are densely sampled while others
receive little to no sampling. Consequently, inference
using an Action Space 2 PPO model yields very good
results in well-sampled areas and significantly poorer
results in sparsely sampled areas.
Another possible reason for the better perfor-
mance of Action Space 1 could be the simpler and
more direct relationship between the Action Space
and Observation Space, making it easier to learn. In
Action Space 1, there is a one-to-one correspondence
between the parameters in the Action Space and those
in the Observation Space. In Action Space 2, how-
ever, this mapping is more complex, complicating the
learning process.
7 CONCLUSION
Even today, the configuration of connections in satel-
lite communication networks is often performed man-
ually. Given the increasing complexity of the hard-
ware used both in satellites and on the ground, the
application of AI in this domain is a logical progres-
sion. In this work, a transponder environment was de-
veloped for link configuration on a satellite transpon-
der, and the potential utility of RL for solving a static
problem was investigated. Two experiments were
conducted, differing in their implementation of the
action space. In both, a PPO model was compared
to two baselines: Simulated Annealing and the Ran-
dom Action model. The results showed that in both
experiments, the Simulated Annealing metaheuristic
outperformed the PPO model. Since only the learning
rate was optimized for the PPO, further improvements
could be achieved through additional hyperparameter
tuning. Additionally, the weighting of the metrics was
not explored, which could be another factor for en-
hancing PPO performance.
It is likely that the performance gap between Sim-
ulated Annealing and PPO would widen as the static
problem becomes more complex and realistic. Sim-
ulated Annealing is specifically designed for efficient
exploration of large search spaces, potentially demon-
strating even greater superiority over PPO in more
complex scenarios. Given the growing complexity of
this field, continued research is essential to find so-
lutions to this optimization problem. The environ-
ment must be refined to better match real-world re-
quirements. For instance, only a single data rate was
used in this study, whereas in practice, this parameter
is continuous or must be represented in a rasterized
form. The mutual interference between links was ne-
glected and needs to be incorporated for practical ap-
plications. The restriction to exactly three links must
also be removed. An important next step is to transi-
tion from a static to a dynamic model, allowing each
link to have an active time period. The agent must
also evolve alongside the environment, with the neu-
ral network topology becoming more complex. A po-
tential strength of PPO could be its ability to handle
scenarios where links on the transponder are dynam-
ically added or terminated over time, leveraging its
capacity to learn policies that comprehend underlying
metrics. However, this potential requires further ex-
perimentation and comprehensive research.
Overall, these future steps present an opportunity
to enhance the developed model, align it with the
complexity of real-world environments, and validate
its practical applicability.
ACKNOWLEDGEMENTS
This paper was partially funded by the German Fed-
eral Ministry of Education and Research through the
funding program ”quantum technologies - from basic
research to market” (contract number: 13N16196).
Furthermore, this paper was also partially funded
by the German Federal Ministry for Economic Af-
fairs and Climate Action through the funding program
”Quantum Computing – Applications for the indus-
try” (contract number: 01MQ22008A).
REFERENCES
Ardon, L. (2022). “Reinforcement Learning to Solve NP-
hard Problems: an Application to the CVRP”. In: arXiv
preprint arXiv:2201.05393.
Bello, I. et al. (2016). “Neural combinatorial optimiza-
tion with reinforcement learning”. In: arXiv preprint
arXiv:1611.09940.
Deliu, N. (2023). “Reinforcement learning for sequential
decision making in population research”. In: Quality &
Quantity, pp. 1–24.
Klar, M., M. Glatt, and J. C. Aurich (2023). “Performance
comparison of reinforcement learning and metaheuris-
tics for factory layout planning”. In: CIRP Journal of
Manufacturing Science and Technology 45, pp. 10–25.
Li, K. et al. (2021). “Deep reinforcement learning for com-
binatorial optimization: Covering salesman problems”.
In: IEEE transactions on cybernetics 52.12, pp. 13142–
13155.
Mazyavkina, N. et al. (2021). “Reinforcement learning for
combinatorial optimization: A survey”. In: Computers
& Operations Research 134, p. 105400.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
712

Prudencio, R. F., M. R. Maximo, and E. L. Colom-
bini (2023). “A survey on offline reinforcement learn-
ing: Taxonomy, review, and open problems”. In: IEEE
Transactions on Neural Networks and Learning Sys-
tems.
Silver, D. et al. (2018). “A general reinforcement learn-
ing algorithm that masters chess, shogi, and Go through
self-play”. In: Science 362.6419, pp. 1140–1144.
V
´
azquez, M.
´
A. et al. (2020). “On the use of AI
for satellite communications”. In: arXiv preprint
arXiv:2007.10110.
Zhang, T., A. Banitalebi-Dehkordi, and Y. Zhang (2022).
“Deep reinforcement learning for exact combinatorial
optimization: Learning to branch”. In: 2022 26th In-
ternational Conference on Pattern Recognition (ICPR).
IEEE, pp. 3105–3111.
Optimization of Link Configuration for Satellite Communication Using Reinforcement Learning
713
