
Can Bayesian Neural Networks Explicitly Model Input Uncertainty?
Matias Valdenegro-Toro
a
and Marco Zullich
b
Department of Artificial Intelligence, University of Groningen, Nijenborgh 9, 9747AG, Groningen, Netherlands
Keywords:
Uncertainty Estimation, Input Uncertainty, Feature Uncertainty.
Abstract:
Inputs to machine learning models can have associated noise or uncertainties, but they are often ignored and
not modelled. It is unknown if Bayesian Neural Networks and their approximations are able to consider un-
certainty in their inputs. In this paper we build a two input Bayesian Neural Network (mean and standard de-
viation) and evaluate its capabilities for input uncertainty estimation across different methods like Ensembles,
MC-Dropout, and Flipout. Our results indicate that only some uncertainty estimation methods for approximate
Bayesian NNs can model input uncertainty, in particular Ensembles and Flipout.
1 INTRODUCTION
In the last two decades, Neural Networks (NNs) have
become state-of-the-art applications in many differ-
ent domains, such as computer vision and natural
language processing. Despite this, these models are
known as being notoriously bad at modelling un-
certainty, especially when considering the frequen-
tist setting (Valdenegro-Toro, 2021a), in which fixed
parameters are trained to minimize a loss function.
Indeed, while NNs for regression lack a direct way
to estimate uncertainty, Deep NNs for classification
are often found to be extremely overconfident in their
predictions (Guo et al., 2017), even when running
inference with random data (Nguyen et al., 2015).
Bayesian Neural Networks (BNNs), which consider
parameters as probability distributions, provide a nat-
ural way to produce uncertainty estimates, both in
the regression and in the classification setting (Pa-
padopoulos et al., 2001). They have been proven
to be substantially better at producing more reliable
uncertainty estimates, albeit the quality depends on
the techniques which are used to approximate these
models (Ovadia et al., 2019). A model whose uncer-
tainty estimates are reliable is also called calibrated,
and one of the main metrics for calibration is called
the Expected Calibration Error (ECE) (Naeini et al.,
2015).
Uncertainty, in the context of Machine Learning,
is split in two categories (H
¨
ullermeier and Waege-
man, 2021): (a) epistemic or model uncertainty, and
a
https://orcid.org/0000-0001-5793-9498
b
https://orcid.org/0000-0002-9920-9095
Figure 1: Sample of data from the Fashion-MNIST dataset
with Gaussian noise with increasing standard deviation (σ
in the figure) added. The first row (σ = 0.0) represents the
original, unperturbed data. Natural data are often captured
by means of digital sensors, which are prone to be noisy
and can sporadically fail. Training NNs which can effec-
tively model input uncertainty, especially when the noise is
anomalously high, is important in having reliable predic-
tions, which can be discarded whenever the predictive un-
certainty of the model is too high.
(b) aleatoric or data uncertainty—here also called in-
put uncertainty. These two types of uncertainty are
usually implicitly modelled together in a single con-
cept, called predictive uncertainty, and the process of
recovering the epistemic and aleatoric components is
called uncertainty disentanglement (Valdenegro-Toro
and Mori, 2022). An effective modeling of aleatoric
and epistemic uncertainty by a machine learning
model is crucial whenever this model needs to (a) be
deployed in-the-wild, or (b) be used (in assisting) for
decision-making in safety-critical situations. In these
cases, it is paramount that model is well calibrated: if
it is presented with anomalous or unknown data—for
188
Valdenegro-Toro, M. and Zullich, M.
Can Bayesian Neural Networks Explicitly Model Input Uncertainty?.
DOI: 10.5220/0013313300003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
188-199
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
Classical NN
σ = 0.0 σ = 0.5 σ = 1.0
σ = 1.5
σ = 2.0
DropoutDropConnect5 EnsemblesFlipoutDUQ
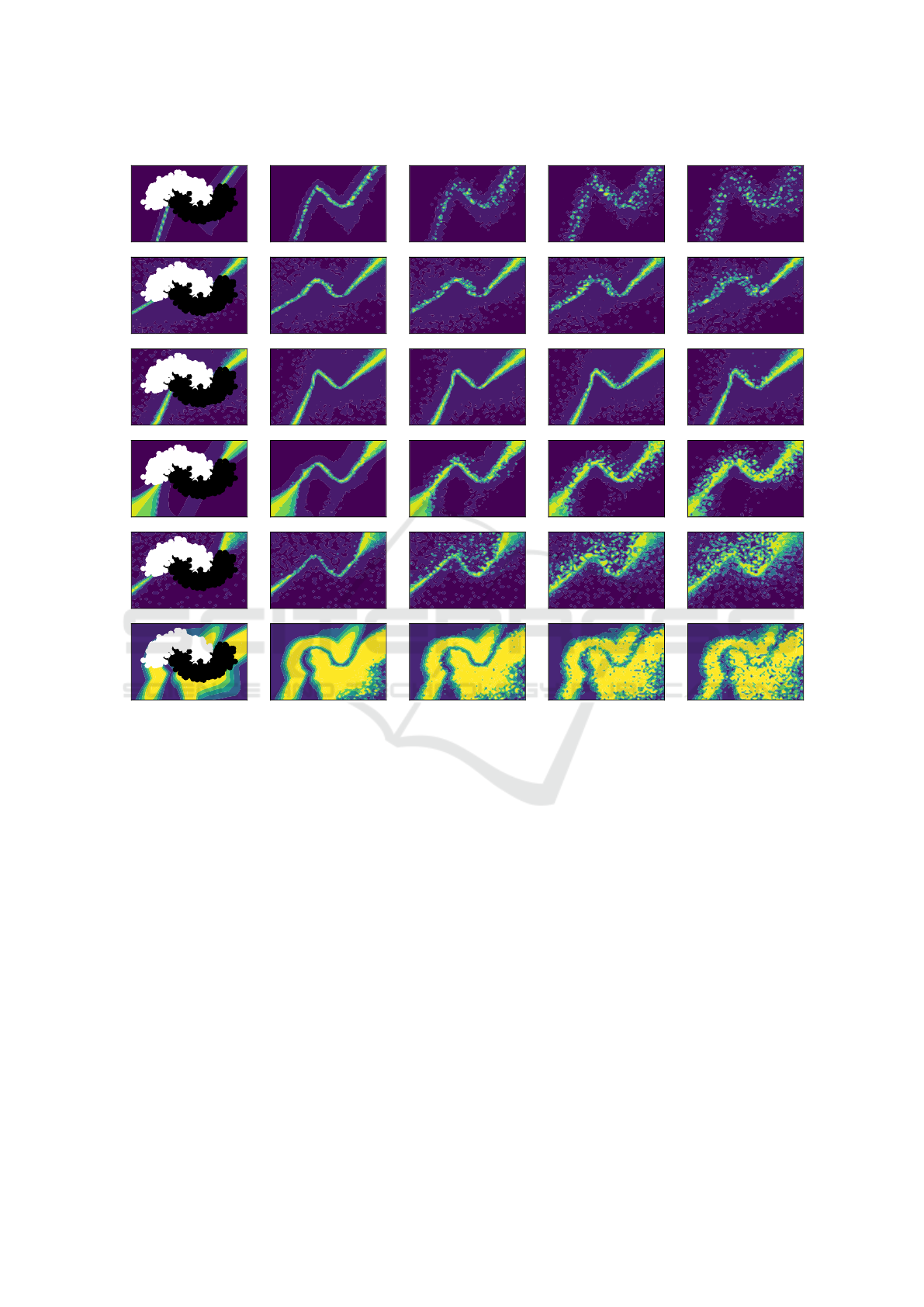
Figure 2: Comparison on the Two Moons dataset with training σ = 0.2, as the testing standard deviation is varied. Each
heatmap indicates predictive entropy (low blue to high yellow) and the first column includes the training data points, With
larger test standard deviation, some UQ methods do not significantly change their output uncertainty (DropConnect, Dropout,
DUQ), while Flipout and Ensembles do have significant changes, indicating that they are able to model input uncertainty and
propagate it to the output.
which it effectively behaves randomly—we want this
reflected in the prediction uncertainty. In this sense, a
highly unconfident prediction can be discarded a pri-
ori because it has a high chance of being inaccurate.
The digitization of natural data requires captur-
ing it with either manual measurements or sensors,
both procedures which are subjects to noise: this
represents aleatoric uncertainty; recapturing the data
within the same condition several times will lead to
different measurements. We can thus summarize each
data point as a mean data and the corresponding stan-
dard deviation.
In the present work, instead of letting the NNs im-
plicitly model predictive uncertainty, we provide the
input uncertainty as input, in addition to the mean
value of the data. We call these models two-input
NNs.
We provide our results on two small-scale clas-
sification tasks: the Two Moons toy example and
the Fashion-MNIST dataset (Xiao et al., 2017). We
train classical NNs and five approximate classes of
BNNs (MC-Dropout, MC-DropConnect, Ensembles,
Flipout, Direct Uncertainty Quantification—DUQ)
on these tasks. We observe the behavior of the un-
certainty and ECE when different values of noise are
injected into the data and conclude that often these
models fail to correctly estimate input uncertainty.
The investigation of the quality of predictive un-
certainty estimates for machine learning models is a
long-studied subject and is usually associated with
Bayesian modeling (Roberts, 1965): given the fact
that these models output a probability distribution,
its deviation can be used as a natural estimate of un-
certainty. Deterministic NNs predict point estimates,
Can Bayesian Neural Networks Explicitly Model Input Uncertainty?
189

(a) σ = 0.0 (b) σ = 0.2 (c) σ = 0.4 (d) σ = 0.6 (e) σ = 0.8
Figure 3: The version of the Two Moons dataset (with 1000 data points) used in the present work, the two colors representing
the two categories. From left to right, we add an increasingly higher level of zero-mean Gaussian noise. The standard
deviation is denoted by σ.
thus they lack a natural expression of uncertainty, ex-
cept for the case of classification, where the output—
after the application of the softmax function—is inter-
pretable as a probability distribution. Initial attempts
at computation of probability intervals on the out-
put of NNs include the usage of two-headed models
which output a mean prediction and the standard de-
viation (Nix and Weigend, 1994) and early-day BNNs
(MacKay, 1992). None of these attempts, though,
propose a direct modeling of data uncertainty.
Nonetheless, there are more recent efforts for
achieving this. (Wright, 1998) and (Wright, 1999)
use the Laplace approximation to train a BNN with
input uncertainty, but this is not a modern BNN and
it is only tested on simplistic regression settings.
(Tzelepis et al., 2017) introduce a variation of Support
Vector Machines which include a Gaussian noise for-
mulation for each data point, which is directly taken
into consideration in the hinge loss for determining
the separating hyperplane. (Rodrigues et al., 2023)
introduce the concept of two-input NNs by crafting
a simple toy classification problem, showing how, by
providing more information as input to the models,
their NNs perform better than the regular, “single-
input” counterparts. (H
¨
ullermeier, 2014), instead, fo-
cuses on producing fuzzy loss functions to utilize in
a deterministic setting. This allows to incorporate
input uncertainty in the empirical risk minimization
paradigm. All of these three works limit their investi-
gations to toy problems and, moreover, do not provide
insights into the evaluation of uncertainty estimates.
To the best of our knowledge, we are the first to in-
vestigate the capability of modern BNNs to explicitly
model input uncertainty, by providing an analysis on
the quality of the uncertainty that these models pro-
duce. Our hypothesis is that models being presented
with aleatoric uncertainty as input will not be able to
effectively reflect it in the predictive uncertainty, ex-
hibiting high levels of confidence even when the input
is anomalously noisy.
The contributions of this work are an evaluation
of the capability of BNNs to explicitly model uncer-
tainty in their inputs, we evaluate several uncertainty
estimation methods and approximate BNNs, and con-
clude that only Ensembles are—to a certain extent—
reliable when considering explicit uncertainty in its
input.
2 EVALUATING BAYESIAN
NEURAL NETWORKS
AGAINST INPUT
UNCERTAINTY
2.1 Datasets
We base our experiments on two datasets, the Two
Moons dataset and Fashion-MNIST.
Two Moons. Two Moons is a toy binary classification
problem available in the Python library scikit-learn
(Kramer and Kramer, 2016). It is composed by a vari-
able number of 2d data points generated in forming
two interleaving half circles. Due to the ease of visu-
alization, it is often being used in research on uncer-
tainty estimation for visualizing the capability of the
models to produce reliable uncertainty values in and
around the domain of the dataset. Notice that, due to
its toy nature, this dataset only comes with a training
set, i.e., there are no validation or test splits. Some
examples of unperturbed and perturbed Two Moons
dataset with 1000 data points are visible in Figure 3.
Fashion-MNIST. Fashion-MNIST is a popular
benchmark for image classification introduced by
(Xiao et al., 2017) as a more challenging version
of MNIST (LeCun et al., 1998). It features 70 000
grayscale, 28 × 28 images of clothing items from 10
different categories. The images come pre-split into a
training set of 60 000 and a test set of 10 000 images.
A sample of unperturbed and perturbed images from
Fashion-MNIST is showcased in Figure 1.
Toy Regression. For a regression setting we use
a commonly used sinusoid with variable amplitude
and both homoscedatic (ε
2
) and heteroscedatic (ε
1
)
aleatoric uncertainty, defined by:
f (x) = x sin(x) + ε
1
x + ε
2
(1)
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
190
mean x
µ
std x
σ
FC layer
10 units
FC layer
10 units
Concat
FC layer
20 units
FC layer
20 units
FC layer
1 unit
output
Figure 4: Diagram of the MLP for the Two Moons dataset. The mean and std input pass through two parallel fully-connected
(“FC”) layers of 10 units, whose output is concatenated. Then, two 20-units fully-connected layers and the final classification
layer are applied, which produce the final output. The two 20-units layers (depicted with bold borders) are made Bayesian—
depending on the specific technique used.
Where ε
1
, ε
2
∼ N (0, 0.3). We produce 1000 sam-
ples for x ∈ [0, 10] as a training set, and an out-
of-distribution dataset is built with 200 samples for
x ∈ [10, 15].
2.2 Predictive Uncertainty in NNs
As previously stated, there is no direct way to com-
pute predictive uncertainty on standard deterministic
NNs for regression. In the case of c-way classifica-
tion, instead, the output f
θ
(x)
.
= ˆy is a vector of c
scalars, each scalar representing the confidence that
the model assigns to the input x belonging to the cor-
responding category. If softmax is applied to the out-
put, we can see it as a probability distribution, and we
can define two notions of uncertainty:
• Entropy of the distribution (the flatter the distri-
bution, the more the model is uncertain)
H( ˆy) = −
c
∑
k=1
ˆy
k
log ˆy
k
• Maximum of the distribution (the less confident
the model is on assigning the model to the cate-
gory with the maximum value, the more the model
is uncertain).
Confidence( ˆy) = max{ ˆy
k
} (2)
Unconfidence = 1 − Confidence (3)
In the present work, we make use of both definitions
of uncertainty. For a regression setting, we use the
predictive mean µ(x) as a prediction and predictive
standard deviation σ(x) as uncertainty of that predic-
tion.
µ(x) = M
−1
∑
i
f
θ
i
(x) (4)
σ
2
(x) = M
−1
∑
i
[ f
θ
i
(x) − µ(x)]
2
(5)
Where f
θ
i
is an stochastic bayesian model or ensem-
ble members (via index i, see Section 2.3) and M is
the number of forward passes or ensemble members,
we usually use M = 50 for stochastic bayesian mod-
els.
In addition, the quality of the uncertainty esti-
mates provided by the models can be assessed using
calibration. The main idea is that, given a data point
x, the model confidence should correspond to the ac-
curacy attained on x. By gathering the results on con-
fidence and accuracy on a dataset, the confidence val-
ues can be divided in B bins. Then, the mean accu-
racy on each bin can be computed. Given a bin b, we
call confidence
b
the reference confidence on the bin;
accuracy
b
is then the mean accuracy value. Finally,
the calibration can be measured by means of the ECE:
ECE =
B
∑
b=1
N
b
|confidence
b
− accuracy
b
|
N
where N is the size of the dataset, and N
b
indicates the
number of data points belonging to bin b.
2.3 Bayesian Neural Networks
BNNs provide a paradigm shift, in which the param-
eters of the model are not scalars, but probability dis-
tributions. This allows for a more reliable estimate of
the predictive uncertainty (Naeini et al., 2015; Ovadia
et al., 2019) due to the more noisy nature of the pre-
diction. As in all Bayesian models, the driving princi-
ple behind BNNs is the computation of the posterior
density p(θ|D), which is obtained via Bayes’ theo-
rem:
p(θ|D) =
likelihood
z }| {
p(D|θ)·
prior
z}|{
p(θ)
p(D)
|{z}
marginal likelihood
. (6)
The goal of Bayesian models is to start from a prior
distribution defined on the parameters and updating
the knowledge over these parameters by means of
the evidence—the likelihood. The updated probabil-
ity distribution of the parameter is the posterior. The
computation of the marginal likelihood (the denomi-
Can Bayesian Neural Networks Explicitly Model Input Uncertainty?
191
mean x
µ
std x
σ
Conv 7 × 7
32 ch., 2 str.
Conv 7 × 7
32 ch., 2 str.
Concat
Preact
res. block
64 ch.
Preact
res. block
64 ch.
Preact res. block
128 ch.,
downsample
Preact
res. block
128 ch.
Preact res. block
256 ch.,
downsample
Preact
res. block
256 ch.
Preact res. block
512 ch.,
downsample
Preact
res. block
512 ch.
GAP &
flatten
. . .
512
10
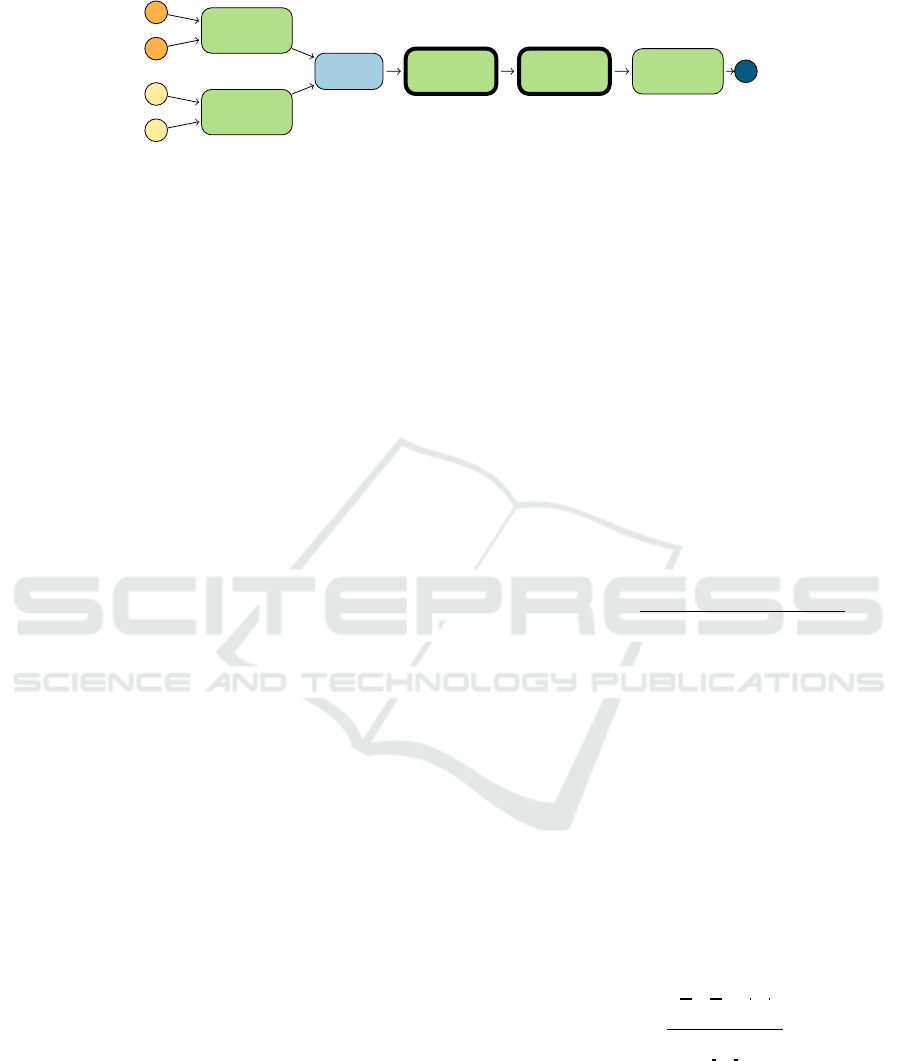
Figure 5: Diagram depicting the two-input Preact-ResNet18 used on Fashion-MNIST. The input mean and standard deviation
are passed through two 7 × 7 convolutions with 32 channels and stride 2, whose outputs are concatenated. The data is then
passed sequentially through a series of residual blocks (“Preact res. block”) with increasing number of channels. Some blocks
operate downsampling of the spatial dimensions. A detailed depiction of the residual blocks is shown in Figure 11. Following
the last residual block, global average pooling (“GAP”) is applied to return a vector of size 512. This vector is passed through
a fully-connected layer which produces the final output of 10 units. The last residual block (depicted with thick borders) can
be rendered Bayesian by turning its convolutional layers into the corresponding Bayesian version, depending on the method
used.
nator in Equation (6)) is often computationally unfea-
sible, thus Bayesian Machine Learning often resort to
approximations based on variations of Markov-Chain
Monte-Carlo methods. However, these methods are
still too computationally demanding for BNNs (Blun-
dell et al., 2015), hence a number of techniques for
approximating BNNs have been proposed in the last
decade. In the present work, we make use of a handful
of these.
MC-Dropout. MC-Dropout (Gal and Ghahramani,
2016) is a simple modification of the Dropout al-
gorithm for NN regularization (Hinton et al., 2012).
During the training phase, at each forward pass, some
intermediate activations are randomly zeroed-out with
a given probability value p. During inference, the
dropout behavior is turned off. MC-Dropout main-
tains the dropout behavior active during the inference
phase, thus allowing for the model to become stochas-
tic. A probability distribution over the output can
hence be obtained by repeatedly running inference on
the same data point—a process called sampling.
MC-DropConnect. DropConnect (Wan et al., 2013)
is a conceptual variation of Dropout: instead of sup-
pressing activations, it acts by randomly zeroing-out
some parameters with a given probability value p. As
for Dropout, DropConnect is also meant as a regu-
larization technique to be activated during training.
MC-DropConnect, analogously to MC-Dropout, al-
lows this method to be active also during inference,
hence making the model stochastic.
Direct Uncertainty Quantification. DUQ (van
Amersfoort et al., 2020) is a method for creating a
deterministic NN which incorporates reliable uncer-
tainty estimates in its prediction. It is designed only
for classification tasks. Its main idea is to redefine
the final classification layer: instead of a vector of c
scalars, the model thus produces c embeddings in the
same space R
m
. The model is trained to pull the em-
beddings of the same categories closer to each other:
the goal is to produce c clusters corresponding to the
classes. The data point x is then assigned to the cate-
gory whose corresponding cluster centroid is nearest;
similarly, uncertainty can be defined as the RBF dis-
tance to the nearest cluster centroid µ
k
:
Uncertainty
DU Q
= max
k∈{1,...,c}
exp
"
1
m
|| f
θ
(x) − µ
k
||
2
2
2σ
2
#
,
(7)
with σ being a hyperparameter. (van Amersfoort
et al., 2020) suggest to train DUQ models using gra-
dient penalty (Drucker and Le Cun, 1992), a regular-
ization method which rescales the gradient by a hy-
perparameter λ.
Flipout. vBayes By Backprop is a Variational
Inference–inspired technique introduced by (Blundell
et al., 2015). It allows to directly model the param-
eters of a BNN as Gaussian distributions, while in-
troducing a technique to enable the backpropagation-
based training typical of deterministic NNs. It can be
seen as a proper Bayesian method, since it directly
models the probability distribution of the parameters,
which are explicitly given a prior distribution. The
authors propose to use, as prior, a mixture of two
zero-mean Gaussian with standard deviations σ
1
and
σ
2
respectively and a mixture weight π. BayesBy-
Backprop makes use of a variational loss based on
the Kullback-Leibler divergence between the approx-
imate posterior learnt by the model and the true pos-
terior. BayesByBackprop is, though, computationally
intensive and unstable; (Wen et al., 2018) introduced
a scheme, called Flipout, to add perturbations to the
training procedure, allowing to reduce training time
and increasing stability.
Ensembles. Ensembles are groups of non-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
192

Table 1: Hyperparameters used in the implementation and training of the NNs. “FMNIST” is short for Fashion-MNIST and
“TM” corresponds to the Two Moons dataset.
# epochs Batch size Other hyperparameters # samples for inference
TM FMNIST TM FMNIST TM FMNIST TM FMNIST
Deterministic NN 100 15 32 256 — —
MC-Dropout 100 15 32 256 p = 0.2 p = 0.1 100 25
MC-DropConnect 100 15 32 256 p = 0.05 100 25
Ensembles 100 15 32 256 # components= 5 5 5
DUQ 100 — 32 — σ = 0.1;λ = 0.5 — —
Flipout 300 15 32 256 σ
1
= 5; σ
2
= 2; π = 0.5 100 25
Bayesian NNs with the same architecture and trained
on the same data, but with different random initial-
ization of their parameters. They are not inherently
Bayesian—their output is not stochastic—but the fact
of having multiple outputs for a single data point al-
lows us to make considerations on the predictive un-
certainty. Moreover, it has been shown (Lakshmi-
narayanan et al., 2017) that ensembles are producing
uncertainty estimates which are often superior in reli-
ability to other methods here presented.
2.4 Two-Input NNs for Input
Uncertainty
In the deterministic paradigm for NNs, the input is
evaluated one-by-one, i.e., the data is passed one sam-
ple at the time without explicitly passing input uncer-
tainty as input to the model. Given the data space R
d
,
the model is hence seen as a function f
θ
: R
d
→ Y ⊆
R
k
, where k is dependent on the task that the model
needs to solve and θ indicates the parameters of the
model (which are probability distributions in the case
of BNNs). In graphical terms, for both deterministic
and Bayesian NNs, the model is represented with an
input layer with n neurons.
In the present work, instead, inspired by (Ro-
drigues et al., 2023), we take a different approach
and craft a NN architecture, which we call two-input
NN. As the name suggests, this model has two input
channels: (a) the mean data x
µ
(of dimension d), and
(b) the standard deviation of the data x
σ
, also of di-
mension d. Thus, a two-input NN is represented as
a function f
θ
: R
d
× R
d
→ Y . This setting allows the
NN to directly model input uncertainty. We can see
this process as feeding multiple versions of the same
data to the model, by accounting for the uncertainty—
encoded in the standard deviation—which is intrinsic
in the process of capturing this data.
We created three different versions of two-input
NNs, one per dataset.
NN for Two Moons. For the Two Moons dataset, we
make use of a Multilayer Perceptron (MLP) with four
input neurons (2 neurons for x
µ
, 2 neurons for x
σ
) and
three hidden layers of, respectively, 10, 20 and 20 hid-
den units and ReLU activation and a final, one-unit
classification layer. The first hidden layer is dupli-
cated so that the information of the mean and standard
deviation flows parallely through them, after which
the outputs are concatenated. The two 20-units layers
are all Bayesian, which means they implement either
MC-Dropout, MC-DropConnect, or Flipout. Ensem-
bles and DUQ use regular MLPs, with DUQ replac-
ing the classification layer with its custom implemen-
tation mentioned in Section 2.3. A diagram of the
architecture is depicted in Figure 4.
NN for Fashion-MNIST. Inspired by (Harris et al.,
2020), for Fashion-MNIST we use a custom Preact-
ResNet18 (He et al., 2016) with two modifications
with respect to the original implementation.
1. We turn this model into a two-input NN by mod-
ifying the first convolutional layer. Instead of a
convolution with 64 output channels, we operate
two convolutions in parallel with 32 output chan-
nels: the first one operates on x
µ
, the second one
on x
σ
.
2. The second modification instead turns the NN into
a BNN: we modify the two convolutional layers
of the last residual block by implementing MC-
Dropout, MC-DropConnect, or Flipout on them.
Notice that the ensemble uses regular convolu-
tions. Due to computational constraints, we don’t
train a model with DUQ for Fashion-MNIST.
NN for Toy Regression. We use a similar architec-
ture than the NN for two moons. A MLP with four
input neurons (2 neurons for x
µ
, 2 neurons for x
σ
) and
four hidden layers of, respectively, 10, 10, 20 and 20
hidden units and ReLU activation and a final, one-
unit regression layer. There are separate hidden layers
for input mean and input standard deviation, concate-
nated to connect to the final set of hidden layers.
Can Bayesian Neural Networks Explicitly Model Input Uncertainty?
193
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00
σ
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
ECE
Expected Calibration Error as Function of σ
Classical NN
Dropout
DropConnect
5 Ensembles
Flipout
DUQ
(a) Expected Calibration Error
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00
σ
0.850
0.875
0.900
0.925
0.950
0.975
1.000
1.025
Output confidence
Output confidence as Function of σ
Classical NN
Dropout
DropConnect
5 Ensembles
Flipout
DUQ
(b) Output confidence as function of input uncertainty σ.
Figure 6: Comparison of Expected Calibration Error and Output Confidences on the Two Moons dataset as input uncertainty
σ varies. The smallest variation in ECE is with DropConnect while Ensembles and Flipout have the largest decrease of output
confidence.
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00
σ
0.00
0.05
0.10
0.15
0.20
0.25
ECE
Expected Calibration Error as Function of σ
Classical NN
Dropout
DropConnect
5 Ensembles
Flipout
DUQ
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00
σ
0.00
0.01
0.02
0.03
0.04
0.05
ECE
Expected Calibration Error as Function of σ
Classical NN
Dropout
DropConnect
5 Ensembles
Flipout
DUQ
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00
σ
0.000
0.005
0.010
0.015
0.020
ECE
Expected Calibration Error as Function of σ
Classical NN
Dropout
DropConnect
5 Ensembles
Flipout
DUQ
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00
σ
0.0000
0.0025
0.0050
0.0075
0.0100
0.0125
0.0150
0.0175
ECE
Expected Calibration Error as Function of σ
Classical NN
Dropout
DropConnect
5 Ensembles
Flipout
DUQ
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00
σ
0.000
0.001
0.002
0.003
0.004
ECE
Expected Calibration Error as Function of σ
Classical NN
Dropout
DropConnect
5 Ensembles
Flipout
DUQ
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00
σ
0.5
0.6
0.7
0.8
0.9
1.0
Output confidence
Output confidence as Function of σ
Classical NN
Dropout
DropConnect
5 Ensembles
Flipout
DUQ
(a) σ = [0.0]
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00
σ
0.5
0.6
0.7
0.8
0.9
1.0
Output confidence
Output confidence as Function of σ
Classical NN
Dropout
DropConnect
5 Ensembles
Flipout
DUQ
(b) σ = [0.0, 0.2]
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00
σ
0.5
0.6
0.7
0.8
0.9
1.0
Output confidence
Output confidence as Function of σ
Classical NN
Dropout
DropConnect
5 Ensembles
Flipout
DUQ
(c) σ = [0.0, 0.2, 0.4]
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00
σ
0.5
0.6
0.7
0.8
0.9
1.0
Output confidence
Output confidence as Function of σ
Classical NN
Dropout
DropConnect
5 Ensembles
Flipout
DUQ
(d) σ = [0.0, 0.2, 0.4, 0.6]
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00
σ
0.5
0.6
0.7
0.8
0.9
1.0
Output confidence
Output confidence as Function of σ
Classical NN
Dropout
DropConnect
5 Ensembles
Flipout
DUQ
(e) σ = [0.0, 0.2, 0.4, 0.6, 0.8]
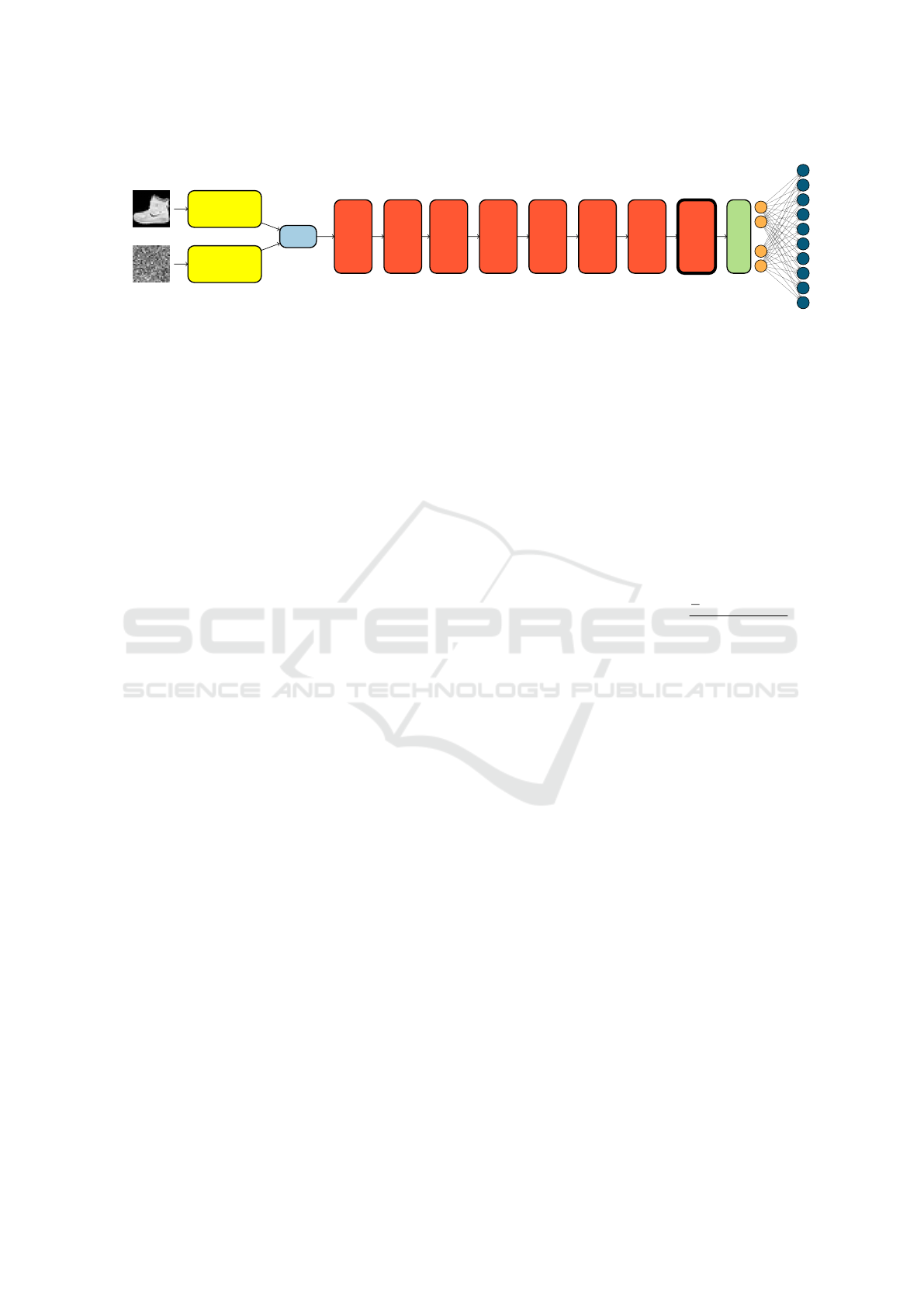
Figure 7: Results for the Two Moons dataset, setting when training set contains multiple values of sigma. ECE (top) and
input/output uncertainty (bottom) are compared. Training on additional σ values increases generalization for testing σ > 1.0,
but makes most models except Ensembles to be insensitive to input uncertainty σ by producing high confidences.
2.5 Experimental Setup
We implement the models mentioned in the previous
sections on Python, making use of the Keras library
with Tensorflow backend. For the Bayesian layers, we
utilize Keras-Uncertainty (Valdenegro-Toro, 2021b).
For the dataset Two moons, we run our experiments
with all of the approximate BNN methods we intro-
duced. Due to computational reasons, we do not train
a NN with DUQ on Fashion-MNIST. In addition, for
both datasets, we train a deterministic NN to allow
for comparing results with respect to the frequentist
setting.
The hyperparameters used for the implementation
and training are showcased in Table 1. In addition
to what there indicated, we trained all of the mod-
els using the Adam optimizer (Kingma and Ba, 2014)
with the Keras-default hyperparameters (learning rate
of 0.001, β
1
9f 0.9, and β
2
of 0.999).
For what concerns the injection of noise in the im-
ages, we simulate the process by passing the original
data point in the x
µ
input. For the standard deviation
input, we pass a structure x
σ
with the same size of the
x
µ
sampled from a normal distribution x
σ
∼ N(0, σ)
with a given input noise standard deviation σ. For
Two moons, we fix σ at 0.5. For Fashion-MNIST, in-
stead, we first normalize the images in the 0-1 range,
then we generate the normal noise with σ = 0.1.
Evaluation of Uncertainty. For what concerns the
evaluation of uncertainty, we test our models with in-
creasing values of Gaussian noise. We then provide
two uncertainty-related comparison:
(a) ECE in function of σ. For DUQ, ECE is cal-
culated considering the specific Uncertainty
DU Q
metric from Equation (7).
(b) Output confidence in function of σ. The confi-
dence is computed as per Equation (2). For DUQ,
the confidence is computed as the complemen-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
194
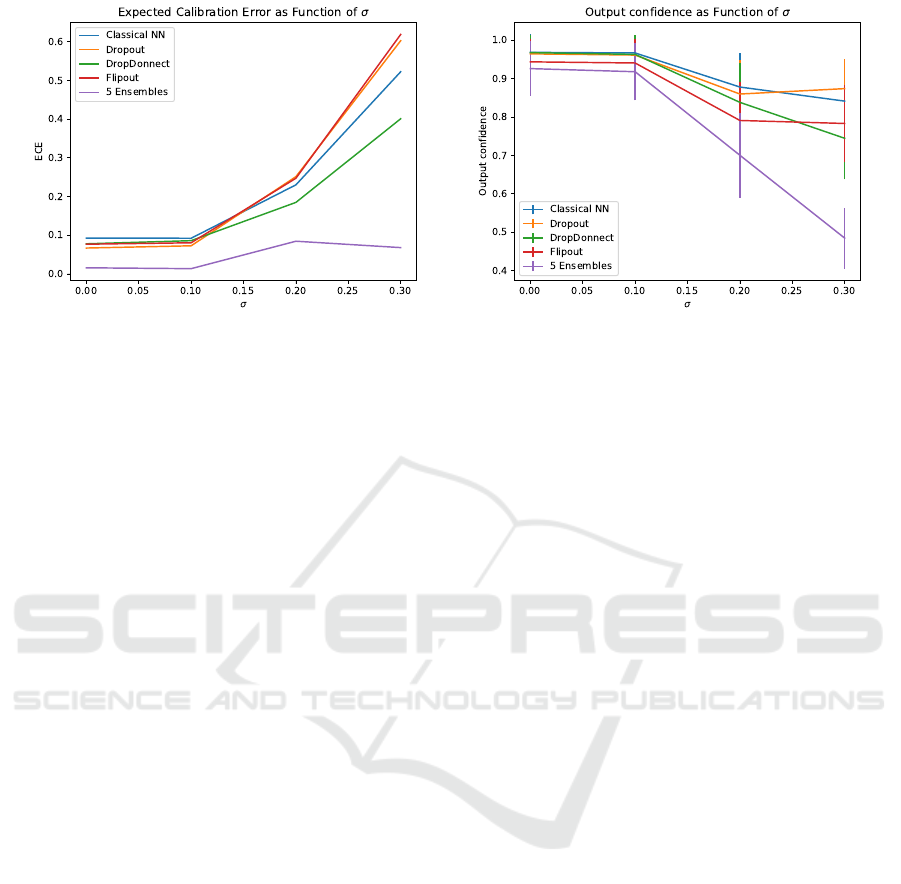
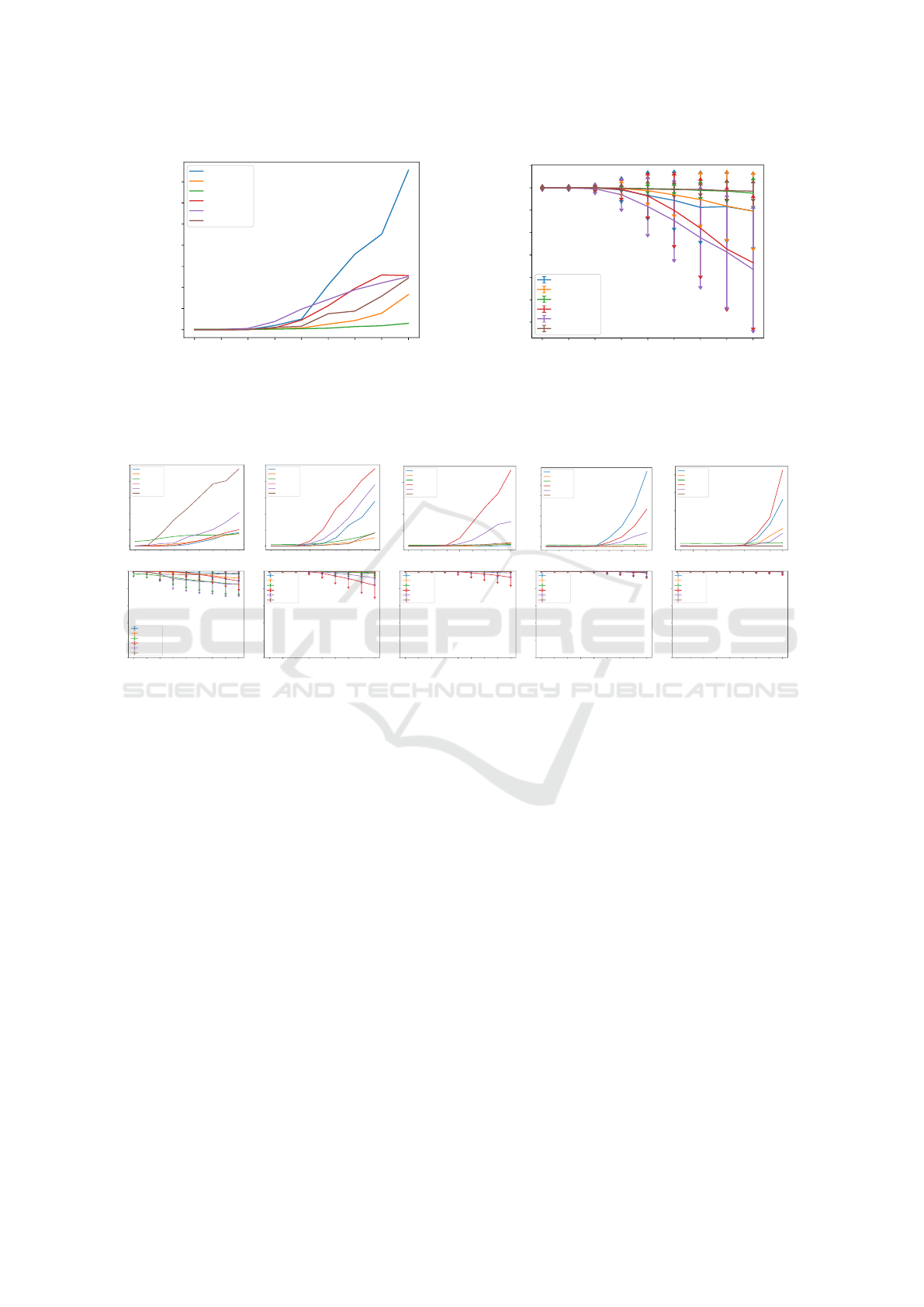
(a) Expected Calibration Error (b) Output confidence as function of input uncertainty σ.
Figure 8: Comparison of Expected Calibration Error and Output confidences for Fashion MNIST as input uncertainty σ is
varied. Note how Ensembles has little variation in calibration error and the largest decrease in confidence with increasing σ.
tary of the normalized uncertainty obtained from
Equation (7).
Finally, due to the ease of visualization provided by
the 2D nature of Two Moons, we plot the dataset and
the uncertainty, calculated in terms of entropy, for a
lattice of points around the dataset.
3 EXPERIMENTAL RESULTS
We perform experiments on two datasets. The pur-
pose of these experiments is to evaluate if a Bayesian
neural network and other models with uncertainty es-
timation, can learn to model input uncertainty from
two inputs (mean and standard deviation). We test
this with a simple setup, we train models with fixed
levels of input uncertainty, and then test with increas-
ing levels of input uncertainty.
Our expectation is, if a model properly learns
the relationship between input and output uncertainty,
then increasing input uncertainty should lead to in-
creases in output uncertainty. We measure output un-
certainty via entropy and maximum softmax confi-
dence, and quality of uncertainty via the expected cal-
ibration error.
3.1 Two Moons Toy Example
We first evaluate on a toy example, the Two Moons
dataset, available in scikit-learn, as it allows for easy
control of input uncertainty and to visualize its ef-
fects. We perform two experiments, first we train a
model with a single σ value during training, and then
train a model with multiple σ values.
We first examine the case for a single training
uncertainty, we use σ = 0.2. We plot and compare
the output entropy distribution over the input domain,
keeping the mean fixed but varying the input uncer-
tainty σ from σ = 0.0 to σ = 2.0. These results are
presented in Figure 2 and detailed plots for two met-
rics in Figure 6.
These results show that only Ensembles and
Flipout significantly decrease their output confidence
as the input uncertainty σ increases, while a classical
NN without uncertainty estimation becomes highly
miscalibrated, and other methods only produce mi-
nor decreases in output confidence. No variations in
ECE and output confidence while σ increases indi-
cates that the model might be ignoring the input un-
certainty, which is exactly the behavior we wanted to
test.
We secondly examine the case for mul-
tiple training input uncertainties, using
σ ∈ [0.0, 0.2, 0.4, 0.6, 0.8], and testing with
σ ∈ [0.0, 0.25, 0.5, 0.75, 1.0, 1.25, 1.50, 1.75, 2.0]
progressively. These results are presented in
Figure 7.
These results indicate that Flipout is always mis-
calibrated relative to other methods, and that all un-
certainty estimation methods minus Flipout seem to
be insensitive to input uncertainty, always producing
high output uncertainty. At the end of the spectrum,
training with five different σ values (Figure 7e), most
methods have learned to ignore the input uncertainty
as output confidence barely varies.
3.2 Fashion-MNIST Image
Classification
We then proceed to evaluate our hypothesis on
Fashion-MNIST. We train the models on a fixed stan-
dard deviation value σ = 0.1 and report the corre-
Can Bayesian Neural Networks Explicitly Model Input Uncertainty?
195
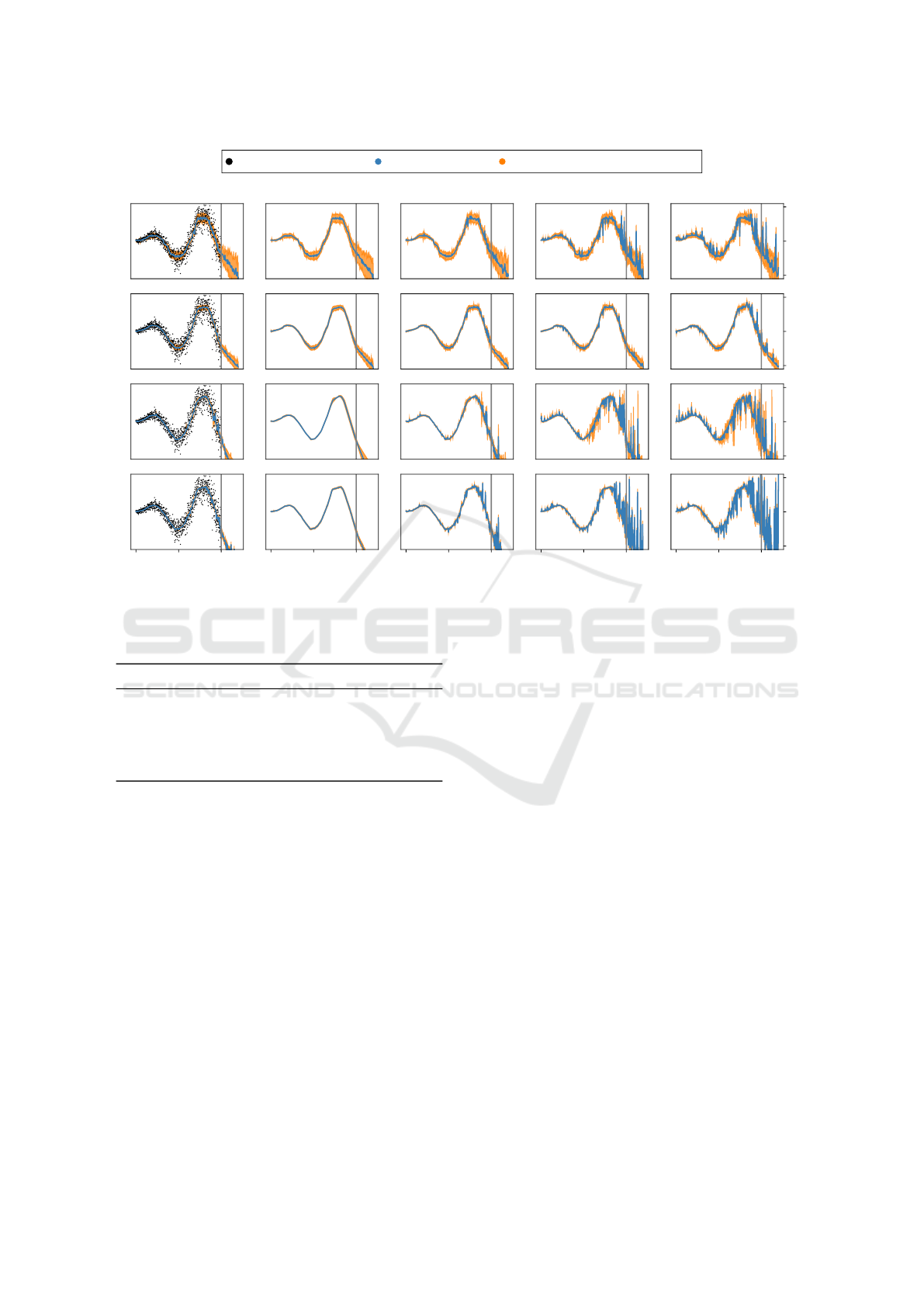
Training Data Points
Predictive Mean Predictive Standard Deviation
Dropout
Training σ = 0.20 Testing σ = 0.01 Testing σ = 0.30 Testing σ = 0.50
−10
0
10
Testing σ = 0.70
DropConnect
−10
0
10
5 Ensembles
−10
0
10
0 5 10
Flipout
0 5 10 0 5 10 0 5 10 0 5 10
−10
0
10
Figure 9: Comparison on a toy regression setting with training σ = 0.2 and variable testing standard deviation. Consistent
with classification results, Ensembles and Dropout have the highest sensitivity to input uncertainty σ.
Table 2: Train– and test–set accuracy attained by our NNs
trained on Fashion-MNIST.
Model Train accuracy Test accuracy
Deterministic NN 98.6% 88.6%
MC-Dropout 98.7% 88.7%
MC-DropConnect 98.7% 87.7%
Ensemble 98.5% 88.3%
Flipout 95.5% 85.9%
sponding test-set accuracy in Table 2. ECE and out-
put confidence (computed on the test-set) as function
of input uncertainty are presented in Figure 8. In this
case, we restrict the range of standard deviation for
the testing to σ =0.0, 0.1, 0.2 and 0.3 While we train
on a single input σ, Ensembles and Flipout decrease
their output confidence while input uncertainty σ in-
creases, as expected, while other methods do not. The
results are similar to what we observed on the Two
Moons dataset, indicating that our results and experi-
ments generalize to a more complex image classifica-
tion setting.
3.3 Toy Regression Example
Finally we evaluate results on the toy regression ex-
ample, these results are shown in Figure 9 in terms of
predictions with epistemic uncertainty, and Figure 10
by comparing input and output uncertainties.
Dropout and DropConnect are insensitive to
changes in input uncertainty, mostly by producing
large uncertainties that do not vary with the input un-
certainty, while Ensembles and Flipout do have vary-
ing output uncertainty with the input uncertainty, in
a monotonic way, Flipout has increasing uncertainty
mostly as variations in the predictive mean, while En-
sembles has variation mostly on the standard devia-
tion, so we consider the Ensemble results to be more
representative of our expectations on how output un-
certainty should behave as functions of input uncer-
tainty.
Results on this regression example are consistent
with our previous classification results, indicating that
the results are general enough across tasks.
4 CONCLUSIONS
In the present work, we investigated the quality
of modeling aleatoric uncertainty by classical Neu-
ral Networks (NNs) and Bayesian Neural Networks
(BNNs) when the input uncertainty is fed directly to
the models in addition to the canonical input. We pro-
posed a simple setting in which we artificially injected
Gaussian noise in two famous benchmark datasets—
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
196
0.01 0.25 0.50 0.75 1.00
Input σ
0
2
4
6
8
10
Output σ
Output σ as function of input σ for Dropout
(a) Dropout
0.01 0.25 0.50 0.75 1.00
Input σ
0
2
4
6
8
10
Output σ
Output σ as function of input σ for DropConnect
(b) Dropconnect
0.01 0.25 0.50 0.75 1.00
Input σ
0
2
4
6
8
10
Output σ
Output σ as function of input σ for 5 Ensembles
(c) 5 Ensembles
0.01 0.25 0.50 0.75 1.00
Input σ
0
2
4
6
8
10
Output σ
Output σ as function of input σ for Flipout
(d) Flipout
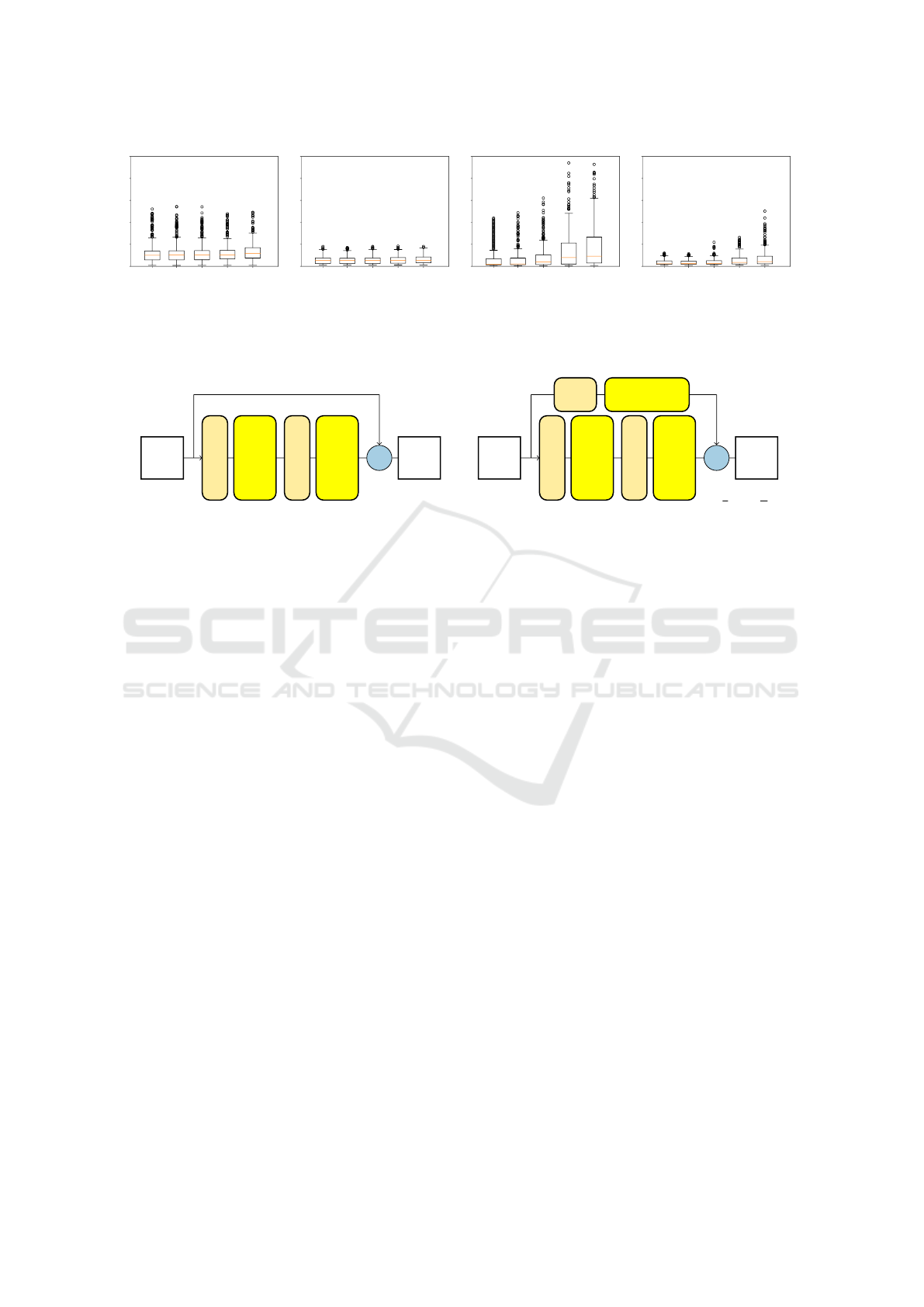
Figure 10: Comparison of output standard deviation as function of input standard deviation for the toy regression setting via
boxplots. Flipout seems barely sensitive to changes in input uncertainty, while Ensembles has the highest reaction to increased
input uncertainty.
(a)
input
shape
h × w × m
BN + ReLU
Conv 3 × 3
n ch., 1 str.
BN + ReLU
Conv 3 × 3
n ch., 1 str.
+
output
shape
h × w × n
skip connection
(b)
input
shape
h × w × m
BN + ReLU
Conv 3 × 3
n ch., 2 str.
BN + ReLU
Conv 3 × 3
n ch., 1 str.
+
output
shape
⌈
h
2
⌉ × ⌈
w
2
⌉ × n
BN +
ReLU
Conv 1 × 1
n ch., 2 str.
skip conn.
Figure 11: Diagrams depicting the two types of residual block used in the Preact-ResNet18 architecture: (a) standard residual
block: a classic residual block with two 3 × 3 convolutions (“Conv”) with a predefined number of output channels n, stride
and padding of 1. The residual blocks are preceded by batch normalization (“BN”) and ReLU activation. The input and output
have the same spatial dimensions h and w. (b) residual block with downsample: it operates a downsampling on the spatial
dimension by modifying the first convolution to have a stride of 2 instead of 1. In order to match the spatial dimension after
the two convolutions, the skip connection presents a BN followed by ReLU and a 1 × 1 convolution with stride 2 and padding
1. The output has spatial dimensions which are half the size of the input’s.
Two Moons and Fashion-MNIST—often used in un-
certainty estimation studies. This simulates a natural
environment in which the data are collected by means
of sensors, which always exhibit a certain degree of
noise. For having the models receive the input un-
certainty directly, while this being separated from the
data itself, we crafted a set of NN architectures—
which we dubbed two-input NNs—with two input
channels, one for the mean data and the other for
the standard deviation corresponding to the added
noise. We trained these models on the above men-
tioned datasets, with a fixed level of noise, using five
approximate BNN techniques: MC-Dropout, MC-
DropConnect, Flipout, Ensembles, and Direct Uncer-
tainty Quantification (DUQ).
We tested these models with data with none to
high-levels of noise and proceeded to compute the
output confidence and the Expected Calibration Er-
ror (ECE) as a function of noise. Our hypothesis was
that, generically, these models would exhibit a cer-
tain degree of insensitivity to added noise, where their
confidence would still be high even when data with
high noise—which are effectively out-of-distribution
in the settings—are presented to them. The results are
pointing in this direction: both on Two Moons and
on Fashion-MNIST, the output confidence for most
of the methods remains high, while the Ensembles
show a pronounced drop in confidence as the input
uncertainty increases. On the other hand, the results
elicited by ECE are not conclusive, depicting a nois-
ier scenario for what concerns the (mis)calibration of
the models.
On Two Moons, where we conducted more exten-
sive analyses, we noticed that, after injecting higher
levels of noise in the training process, the models
would essentially start ignoring the signal coming
from the input uncertainty and always produce very
confident predictions and being less miscalibrated.
Despite this seemingly being an optimal behavior, in
which robustness to noise is enforced, can cause the
NNs to fail at recognizing anomalous data, which is
one of the reasons for adopting BNNs: by providing
more reliable confidence estimates, confidence can be
thresholded to filter out outliers and avoid classifying
them.
Thus, our analyses suggest that both deterministic
NNs and BNNs fail, in a certain degree, to model data
uncertainty when this one is provided explicitly as
input, with ensembles—which are already known in
the literature to being particularly powerful then other
methods at producing good uncertainty estimates—
and, to a lower extent, Flipout, showing the biggest
Can Bayesian Neural Networks Explicitly Model Input Uncertainty?
197

drop in confidence when presented with very noisy
inputs.
Our work, despite being the first analysis on the
uncertainty of the NNs when directly modeling in-
put uncertainty, is still quite small scale and mostly
observational, and could potentially benefit for more
extensive analyses. For instance, larger-scale datasets
might be used—although BNNs are notoriously dif-
ficult and slow to train on bigger datasets. Also, we
could extend the selection of BNN-training schemes
to other methods, like the more recent SWAG (Mad-
dox et al., 2019), or Hamiltonian Monte–Carlo (Neal
et al., 2011), which is still considered the golden stan-
dard for Bayesian modeling, albeit very unfeasible to
apply in the large-scale datasets used in modern Deep
Learning. Finally, our study could benefit from the
addition on the analysis of uncertainty disentangle-
ment by the BNNs, to understand to what extent the
models are able to integrate aleatoric uncertainty into
the input uncertainty.
REFERENCES
Blundell, C., Cornebise, J., Kavukcuoglu, K., and Wier-
stra, D. (2015). Weight uncertainty in neural network.
In Bach, F. and Blei, D., editors, Proceedings of the
32nd International Conference on Machine Learning,
volume 37 of Proceedings of Machine Learning Re-
search, pages 1613–1622, Lille, France. PMLR.
Drucker, H. and Le Cun, Y. (1992). Improving gener-
alization performance using double backpropagation.
IEEE transactions on neural networks, 3(6):991–997.
Gal, Y. and Ghahramani, Z. (2016). Dropout as a bayesian
approximation: Representing model uncertainty in
deep learning. In international conference on machine
learning, pages 1050–1059. PMLR.
Guo, C., Pleiss, G., Sun, Y., and Weinberger, K. Q. (2017).
On calibration of modern neural networks. In Interna-
tional conference on machine learning, pages 1321–
1330. PMLR.
Harris, E., Marcu, A., Painter, M., Niranjan, M., Pr
¨
ugel-
Bennett, A., and Hare, J. (2020). Fmix: Enhanc-
ing mixed sample data augmentation. arXiv preprint
arXiv:2002.12047.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Identity
mappings in deep residual networks. In Computer
Vision–ECCV 2016: 14th European Conference, Am-
sterdam, The Netherlands, October 11–14, 2016, Pro-
ceedings, Part IV 14, pages 630–645. Springer.
Hinton, G. E., Srivastava, N., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. R. (2012). Improving neural
networks by preventing co-adaptation of feature de-
tectors. arXiv preprint arXiv:1207.0580.
H
¨
ullermeier, E. (2014). Learning from imprecise and fuzzy
observations: Data disambiguation through general-
ized loss minimization. International Journal of Ap-
proximate Reasoning, 55(7):1519–1534.
H
¨
ullermeier, E. and Waegeman, W. (2021). Aleatoric and
epistemic uncertainty in machine learning: An intro-
duction to concepts and methods. Machine learning,
110(3):457–506.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Kramer, O. and Kramer, O. (2016). Scikit-learn. Machine
learning for evolution strategies, pages 45–53.
Lakshminarayanan, B., Pritzel, A., and Blundell, C. (2017).
Simple and scalable predictive uncertainty estimation
using deep ensembles. Advances in neural informa-
tion processing systems, 30.
LeCun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
MacKay, D. J. C. (1992). The evidence framework ap-
plied to classification networks. Neural Computation,
4(5):720–736.
Maddox, W. J., Izmailov, P., Garipov, T., Vetrov, D. P., and
Wilson, A. G. (2019). A simple baseline for bayesian
uncertainty in deep learning. Advances in neural in-
formation processing systems, 32.
Naeini, M. P., Cooper, G., and Hauskrecht, M. (2015).
Obtaining well calibrated probabilities using bayesian
binning. In Proceedings of the AAAI conference on
artificial intelligence, volume 29.
Neal, R. M. et al. (2011). Mcmc using hamiltonian dynam-
ics. Handbook of markov chain monte carlo, 2(11):2.
Nguyen, A., Yosinski, J., and Clune, J. (2015). Deep neural
networks are easily fooled: High confidence predic-
tions for unrecognizable images. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 427–436.
Nix, D. A. and Weigend, A. S. (1994). Estimating the mean
and variance of the target probability distribution. In
Proceedings of 1994 ieee international conference on
neural networks (ICNN’94), volume 1, pages 55–60.
IEEE.
Ovadia, Y., Fertig, E., Ren, J., Nado, Z., Sculley, D.,
Nowozin, S., Dillon, J., Lakshminarayanan, B., and
Snoek, J. (2019). Can you trust your model's uncer-
tainty? evaluating predictive uncertainty under dataset
shift. In Wallach, H., Larochelle, H., Beygelzimer,
A., d'Alch
´
e-Buc, F., Fox, E., and Garnett, R., editors,
Advances in Neural Information Processing Systems,
volume 32. Curran Associates, Inc.
Papadopoulos, G., Edwards, P. J., and Murray, A. F. (2001).
Confidence estimation methods for neural networks:
A practical comparison. IEEE transactions on neural
networks, 12(6):1278–1287.
Roberts, H. V. (1965). Probabilistic prediction. Journal of
the American Statistical Association, 60(309):50–62.
Rodrigues, N. V., Abramo, L. R., and Hirata, N. S. (2023).
The information of attribute uncertainties: what con-
volutional neural networks can learn about errors in
input data. Machine Learning: Science and Technol-
ogy, 4(4):045019.
Tzelepis, C., Mezaris, V., and Patras, I. (2017). Linear
maximum margin classifier for learning from uncer-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
198

tain data. IEEE transactions on pattern analysis and
machine intelligence, 40(12):2948–2962.
Valdenegro-Toro, M. (2021a). I find your lack of uncer-
tainty in computer vision disturbing. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 1263–1272.
Valdenegro-Toro, M. (2021b). Keras uncertainty. https://
github.com/mvaldenegro/keras-uncertainty.
GitHub repository.
Valdenegro-Toro, M. and Mori, D. S. (2022). A deeper look
into aleatoric and epistemic uncertainty disentangle-
ment. In 2022 IEEE/CVF Conference on Computer
Vision and Pattern Recognition Workshops (CVPRW),
pages 1508–1516. IEEE.
van Amersfoort, J., Smith, L., Teh, Y. W., and Gal, Y.
(2020). Uncertainty estimation using a single deep
deterministic neural network. In International confer-
ence on machine learning, pages 9690–9700. PMLR.
Wan, L., Zeiler, M., Zhang, S., Le Cun, Y., and Fergus, R.
(2013). Regularization of neural networks using drop-
connect. In Dasgupta, S. and McAllester, D., editors,
Proceedings of the 30th International Conference on
Machine Learning, volume 28 of Proceedings of Ma-
chine Learning Research, pages 1058–1066, Atlanta,
Georgia, USA. PMLR.
Wen, Y., Vicol, P., Ba, J., Tran, D., and Grosse,
R. (2018). Flipout: Efficient pseudo-independent
weight perturbations on mini-batches. arXiv preprint
arXiv:1803.04386.
Wright, W. (1998). Neural network regression with input
uncertainty. In Neural Networks for Signal Processing
VIII. Proceedings of the 1998 IEEE Signal Processing
Society Workshop (Cat. No. 98TH8378), pages 284–
293. IEEE.
Wright, W. (1999). Bayesian approach to neural-network
modeling with input uncertainty. IEEE Transactions
on Neural Networks, 10(6):1261–1270.
Xiao, H., Rasul, K., and Vollgraf, R. (2017). Fashion-
mnist: a novel image dataset for benchmark-
ing machine learning algorithms. arXiv preprint
arXiv:1708.07747.
Can Bayesian Neural Networks Explicitly Model Input Uncertainty?
199
