
Towards Developing Ethical Reasoners: Integrating Probabilistic
Reasoning and Decision-Making for Complex AI Systems
Nijesh Upreti, Jessica Ciupa and Vaishak Belle
The University of Edinburgh, 10 Crichton Street, Edinburgh EH8 9AB, U.K.
Keywords:
Knowledge Representation and Reasoning (KRR), Ethical Reasoners, Probabilistic Decision-Making,
Agent-Based Models, Ethical AI Systems, Contextual Reasoning, Moral Principles in AI, Complex AI
Architectures.
Abstract:
A computational ethics framework is essential for AI and autonomous systems operating in complex, real-
world environments. Existing approaches often lack the adaptability needed to integrate ethical principles into
dynamic and ambiguous contexts, limiting their effectiveness across diverse scenarios. To address these chal-
lenges, we outline the necessary ingredients for building a holistic, meta-level framework that combines in-
termediate representations, probabilistic reasoning, and knowledge representation. The specifications therein
emphasize scalability, supporting ethical reasoning at both individual decision-making levels and within the
collective dynamics of multi-agent systems. By integrating theoretical principles with contextual factors, it fa-
cilitates structured and context-aware decision-making, ensuring alignment with overarching ethical standards.
We further explore proposed theorems outlining how ethical reasoners should operate, offering a foundation
for practical implementation. These constructs aim to support the development of robust and ethically reliable
AI systems capable of navigating the complexities of real-world moral decision-making scenarios.
1 INTRODUCTION
Computational Ethics seeks to create full ethical
agents—autonomous systems capable of translating
moral principles and reasoning into actionable, com-
putable frameworks (Moor, 2006). These agents aim
to optimize justifiable decisions and achieve ethical
competency comparable to or surpassing that of hu-
mans (Moor, 1995; Ganascia, 2007; Anderson et al.,
2006; Awad et al., 2022). Significant progress has
been made in fairness-focused learning frameworks
(Rahman et al., 2024; Zhang et al., 2023; Islam
et al., 2023) and ad hoc approaches to moral rea-
soning (Kleiman-Weiner et al., 2017; Krarup et al.,
2022; Dennis et al., 2016a), with efforts like Kleiman-
Weiner et al.’s common-sense moral model (Kleiman-
Weiner et al., 2017) demonstrating the utility of prob-
abilistic reasoning for ethical judgments. These ad-
vances provide valuable insights into specific aspects
of ethical reasoning.
However, a unified architecture that integrates so-
phisticated ethical theories with adaptive learning sys-
tems remains an open challenge. Autonomous agents
must move beyond task-specific reasoning to navigate
complex moral scenarios involving beliefs, intentions,
and the propositional attitudes of others (Belle, 2023).
The challenge lies in combining structured reason-
ing with adaptive learning in the face of uncertainty
and variability in ethical decisions. This underscores
the urgent need for a robust, theoretically grounded
framework capable of addressing these complexities
systematically.
Specific ethical frameworks, such as Bentham’s
theory of Hedonistic Act Utilitarianism (Bentham,
2003; Anderson et al., 2005) and Ross’s prima facie
duties (Ross, 2002), have historically informed moral
reasoning models. However, these approaches often
lack the flexibility needed to navigate ethical ambigu-
ities and uncertainties in real-world contexts. More
recent works (Lockhart, 2000; Gilpin et al., 2018)
have sought to adapt ethical principles dynamically
to situational ambiguities, yet broader integration is
required to address the diversity and evolving nature
of decision-making environments.
Ethical decision-making depends not only on ab-
stract principles but also on contextual facts, which
are often shaped by subjective interpretations. Ex-
isting frameworks, such as Kleiman-Weiner et al.’s
probabilistic model, provide useful tools for handling
moral judgments. However, a comprehensive archi-
tecture that accommodates meta-level specifications
is still lacking. To address this, it is essential to de-
fine the specifications needed for developing ethical
reasoning systems. These specifications should com-
588
Upreti, N., Ciupa, J. and Belle, V.
Towards Developing Ethical Reasoners: Integrating Probabilistic Reasoning and Decision-Making for Complex AI Systems.
DOI: 10.5220/0013314200003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 588-599
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
bine robust knowledge representation and reasoning
(KRR) techniques, logic, and computational embod-
iment (Levesque, 1986; Segun, 2020). The goal is
to develop adaptive, context-aware systems capable
of managing the nuanced complexities of real-world
ethical dilemmas.
A critical specification is the use of intermediate
representations that integrate contextual factors into
ethical decision-making processes. These represen-
tations break down complex ethical dilemmas into
manageable sub-goals, allowing for a structured and
layered approach to decision-making. This structure
ensures adaptability to dynamic scenarios while pre-
serving alignment with overarching ethical principles.
By incorporating intermediate representations, ethical
agents can gain the flexibility and precision required
to respond effectively to evolving real-world condi-
tions.
In this paper, we explore the challenges and com-
plexities in developing ethical reasoning systems and
identify limitations in existing approaches. We out-
line the necessary ingredients for building a holistic
meta-level framework that integrates reasoning, learn-
ing, and uncertainty management, supported by a set
of proposed theorems defining foundational proper-
ties for ethical reasoning systems. These theorems
provide a conceptual foundation for designing agents
capable of navigating complex decision-making sce-
narios. By synthesizing existing knowledge and in-
corporating causal understanding and probabilistic
reasoning, we aim to establish the groundwork for
constructing ethical agents equipped to address real-
world dilemmas in AI systems.
2 INTERMEDIATE
REPRESENTATIONS FOR KRR
Intermediate representations within KRR frameworks
can take various forms, each contributing distinc-
tively to modeling complex decision-making environ-
ments. These representations may be propositional,
capturing straightforward truth-functional statements;
they may involve first-order logic for detailed object-
property relationships (Sanner and Kersting, 2010)
or include action operators and time sequences to
represent dynamic processes and temporal reasoning
(Beckers et al., 2022). Different logics are required
depending on the structure of the scenario. Some rep-
resentations account for multi-agent beliefs (Ghaderi
et al., 2007), probabilistic uncertainty (Belle, 2020),
and even the belief-desire-intention (BDI) models
standard in multi-agent systems (Belle and Levesque,
2015). These logics help represent agent beliefs,
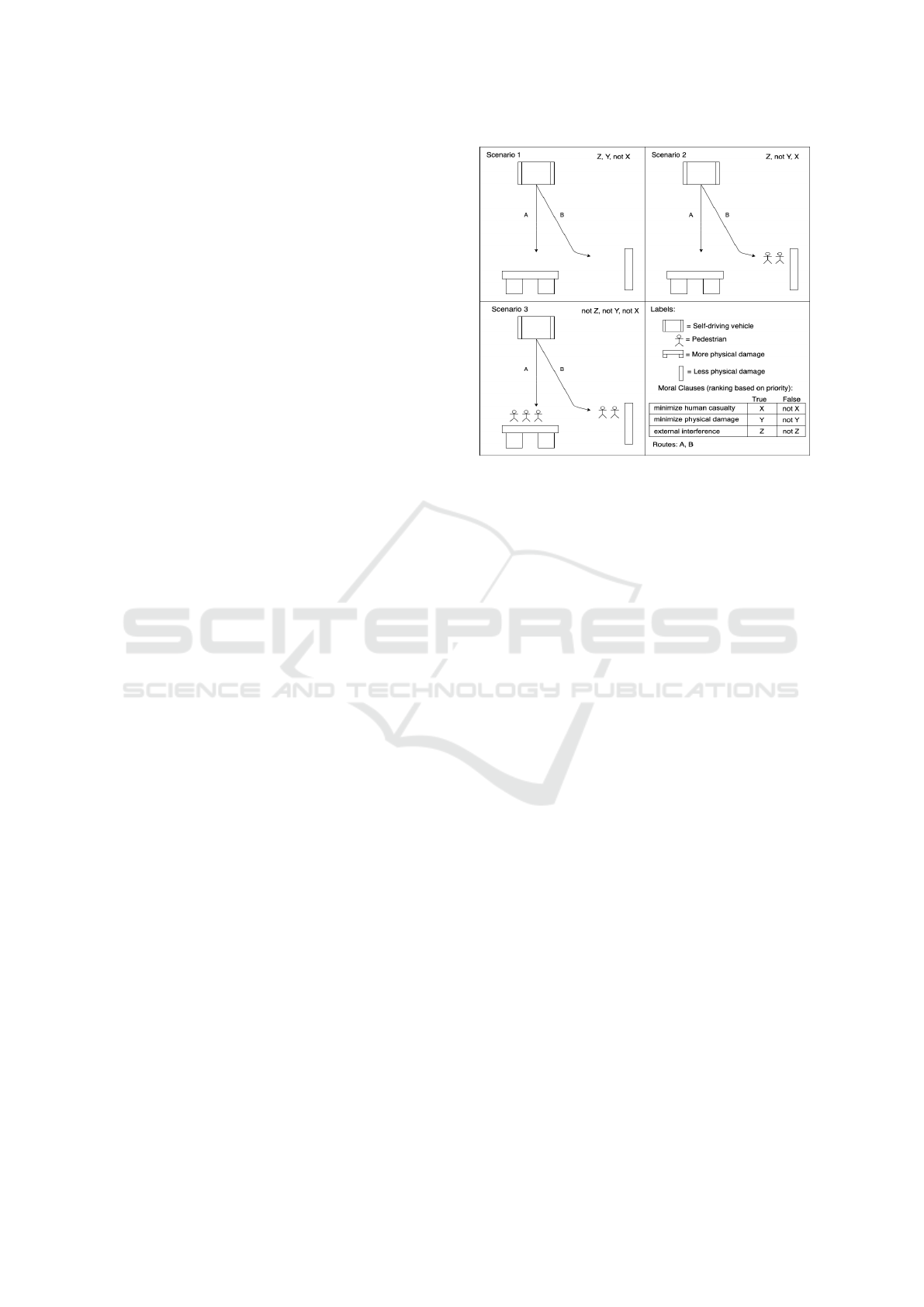
Figure 1: Three scenarios (Scenario 1, Scenario 2, and Sce-
nario 3) each with a choice between two possible routes (A
and B) for a self-driving vehicle are depicted in the figure
above.
preferences, and temporal factors for more adaptable
decision-making. However, this complexity is also
necessary to ensure that every significant aspect of
a situation can be accurately captured and reasoned
about within the KRR framework.
Consider a self-driving car faced with an ethi-
cal decision resembling the classic trolley problem
(Foot, 1967). The car in the current state of opera-
tion must choose between two routes, Route A and
Route B, each presenting different ethical consider-
ations based on potential human casualties, physical
damage, and the degree of interference required to
change its course. Let’s say that the car’s decision-
making framework is governed by three prioritized
principles: Minimize human casualties (X), Mini-
mize physical damage (Y), and Minimize external
interference (Z).
These principles create a structured, yet complex,
moral framework for the car’s next move as it calcu-
lates the best course of action based on each scenario.
The complexity of this ethical calculus is illustrated
across four distinct scenarios:
• Scenario 1 (No Pedestrians): With no human
lives at risk, the vehicle chooses Route B to min-
imize physical damage (Y) without requiring ma-
jor interference (Z), as human safety is not a fac-
tor.
• Scenario 2 (One Pedestrian on Route A): The
presence of a pedestrian on Route A makes mini-
mizing casualties (X) the top priority, leading the
vehicle to choose Route B to avoid harm, even if
it means some interference.
Towards Developing Ethical Reasoners: Integrating Probabilistic Reasoning and Decision-Making for Complex AI Systems
589

• Scenario 3 (Multiple Pedestrians on Both
Routes): Scenario 3 involves Route A (the default
path) with three pedestrians and Route B (requir-
ing intervention) with two. The ethical tension
here lies between staying on the initial path, po-
tentially sacrificing three lives, and intervening to
switch to Route B, saving three lives at the ex-
pense of two. This dilemma raises deeper ethical
questions: Is it justifiable for the car to intervene
in its initial course to save a greater number of
lives, even if this requires sacrificing others who
are already at risk on Route A?
• Scenario 4 (Specific Information about Indi-
viduals): Adding a new layer of complexity,
let us consider that the car has specific informa-
tion about the individuals on each route. Sup-
pose the two individuals on Route A are children,
while the three on Route B are adults. Alterna-
tively, perhaps one of the individuals on Route B
holds a position of societal importance, such as
a medical professional with exceptional skill or
highly important public official. The addition of
these contextual factors—age, health, and social
role—complicates the ethical calculus by intro-
ducing nuanced considerations rooted in cultural,
ethical, and social norms (Andrade, 2019).
In some ethical frameworks, for example, pri-
oritizing children may be seen as more ethical due
to their vulnerability or potential future contribu-
tions. In other contexts, societal roles might influence
decision-making, with a preference given to individ-
uals who can benefit the broader community. This
introduces new questions: Should the vehicle’s ethi-
cal framework consider these personal attributes, po-
tentially valuing certain lives differently? Is it ethi-
cally justifiable for the system to incorporate societal
or cultural values when evaluating lives at risk?
The complexities highlighted by scenarios 3 and
4 reveal the profound challenges in ethical decision-
making. Key questions arise, such as: Is it ethical for
the vehicle to actively alter its path to save more lives,
knowing it risks others in the process? Should char-
acteristics like age or social significance affect the
prioritization of lives? These considerations under-
score the limitations of a purely casualty-based ethical
framework, as individual characteristics and contex-
tual elements often shape ethical perceptions in real-
world settings.
Addressing these multifaceted dilemmas requires
a structured framework that can balance both contex-
tual factors and ethical objectives. In this context,
we introduce “circumstantial dicta” to represent situ-
ational details—such as the vehicle’s initial direction
and specific characteristics of individuals—and “eth-
ical prescripts” to embody moral objectives, such as
prioritizing human life or minimizing physical harm.
By clearly defining these components, the frame-
work can systematically navigate ethical complexi-
ties, adapting its decisions to reflect both individual
principles and situational context.
These scenarios illustrate the challenges in cre-
ating ethical AI systems capable of handling com-
plex, real-world situations. Ethical decision-making
often reflects collective social values and shared un-
derstandings of responsibility and vulnerability, not
merely individual ethical principles (Ruvinsky, 2007;
Kleiman-Weiner et al., 2017; Belle, 2023). For com-
putational ethics, this necessitates frameworks that
not only follow programmed rules but also adaptively
respond to nuanced human values across varied cul-
tural and ethical landscapes. By integrating detailed
contextual information and flexible ethical objectives,
AI systems may be better equipped to make informed,
ethically sound decisions in diverse and unpredictable
environments.
2.1 Circumstantial Dicta and Ethical
Prescripts
This subsection introduces two key concepts: circum-
stantial dicta and ethical prescripts. Circumstantial
dicta refer to contextual factors influencing an agent’s
ethical decisions, such as environmental conditions,
temporal aspects, societal norms, or other situational
details. Circumstantial dicta vary depending on the
application, e.g., road conditions in autonomous driv-
ing or patient conditions in healthcare. Formally, we
define C as the set of circumstantial dicta, with each
c
i
∈ C representing a distinct contextual factor. These
factors shape the ethical landscape, enabling agents to
adapt their decision-making based on situational in-
puts, ensuring a more comprehensive and pragmatic
ethical reasoning framework.
Ethical prescripts encode prioritized objectives
such as minimizing harm or promoting fairness.
Harm is context-specific, ranging from physical in-
jury to loss of autonomy. Quantifying harm involves
utility functions weighted by empirical data or stake-
holder priorities, ensuring decisions align with ethi-
cal standards across diverse scenarios (Krarup et al.,
2022; Beckers et al., 2023). For instance, a prescript
in healthcare may prioritize “do no harm,” encour-
aging low-risk treatment recommendations (Goodall,
2014). In autonomous driving, prescripts might em-
phasize minimizing harm to pedestrians over vehicle
efficiency (Bonnefon et al., 2016). Formally, E is the
set of ethical prescripts, with each e
j
∈ E represent-
ing a moral directive guiding decisions. Together, cir-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
590

cumstantial dicta and ethical prescripts form a frame-
work balancing contextual awareness with ethical
principles, enabling consistent, contextually appropri-
ate decision-making.
2.2 Probabilistic Representation of
Ethical and Contextual Factors
In real-world scenarios, ethical decision-making often
involves navigating uncertainties in situational con-
texts and prioritizing ethical objectives (Krarup et al.,
2022; Dennis et al., 2016a; Dennis et al., 2016b). This
complexity necessitates a probabilistic approach rep-
resenting the likelihood and relevance of circumstan-
tial dicta and ethical prescripts (Pearl, 2014). By as-
signing probabilistic weights to these elements, the
framework enables an ethical agent to prioritize sit-
uationally appropriate and ethically aligned actions,
even amid uncertainty.
2.2.1 Probability Distribution over
Circumstantial Dicta
The first step in constructing a probabilistic represen-
tation is to define a probability distribution over cir-
cumstantial dicta. This distribution reflects the like-
lihood of various contextual factors being relevant to
the decision-making process (Kleiman-Weiner et al.,
2017). For instance, in an autonomous driving con-
text, circumstantial dicta, such as road conditions or
pedestrian presence, often interact (e.g., bad weather
increasing pedestrian risk). These interdependencies
are represented using probabilistic dependency mod-
els like Bayesian networks, which identify and re-
solve feedback loops, ensuring computational feasi-
bility in complex scenarios.
Let C = {c
1
, c
2
, . . . , c
n
} represent the set of all pos-
sible circumstantial dicta relevant to a particular deci-
sion context. We define the probability distribution
over C as:
P(C) = {P(c
i
) | c
i
∈ C}
where P(c
i
) denotes the probability that circumstan-
tial factor c
i
is relevant in a given scenario. Each
P(c
i
) quantifies the likelihood of encountering a spe-
cific contextual condition, such that the distribution
sums to 1:
n
∑
i=1
P(c
i
) = 1
This distribution enables the agent to interpret the sit-
uational elements, assigning higher probabilities to
more probable factors. For example, in a healthcare
setting, c
1
might denote “patient in critical condition”
with a specific probability based on historical data,
while c
2
might represent “patient has a history of
heart disease,” both contributing to the agent’s contex-
tual awareness and action prioritization (Pearl, 2014).
2.2.2 Conditional Probability of Ethical
Prescripts Given Circumstantial Dicta
Ethical prescriptions are prioritized in response to
circumstantial dicta. The framework uses a condi-
tional probability distribution to assign weights to eth-
ical prescriptions based on their relevance to specific
circumstantial factors, allowing for context-sensitive
ethical reasoning.
Let E = {e
1
, e
2
, . . . , e
m
} denote the set of priori-
tized ethical prescripts. The conditional probability
distribution of ethical prescripts given circumstantial
dicta is defined as:
P(E|C) = {P(e
j
|c
i
) | e
j
∈ E, c
i
∈ C}
where P(e
j
|c
i
) represents the probability of priori-
tizing ethical prescript e
j
given the presence of cir-
cumstantial factor c
i
. This conditional probability
captures the degree to which certain ethical priorities
should be emphasized in light of particular situational
factors.
For instance, in an autonomous driving context,
if c
i
represents a high likelihood of pedestrian pres-
ence, the ethical prescript e
j
corresponding to ”pri-
oritize pedestrian safety” would carry a higher condi-
tional probability, influencing the system toward deci-
sions that emphasize this ethical objective. To ensure
a complete probabilistic model, the conditional prob-
abilities over ethical prescripts for each circumstantial
factor sum to 1:
m
∑
j=1
P(e
j
|c
i
) = 1 ∀ c
i
∈ C
This probabilistic structure ensures that the ethi-
cal agent can adjust its moral priorities dynamically
based on changing situational indicators, enabling
a nuanced and responsive ethical reasoning process
(Dennis et al., 2016b; Dennis et al., 2016a; Pearl,
2014).
2.2.3 Joint Probability Distribution of
Circumstantial Dicta and Ethical
Prescripts
To unify the representation of circumstantial dicta and
ethical prescripts within the decision-making frame-
work, a joint probability distribution P(C, E) is de-
fined. This distribution allows the ethical agent to
compute the combined likelihood of encountering
specific contextual factors and corresponding ethi-
cal prescripts, providing a holistic view of scenario-
specific ethical considerations.
Towards Developing Ethical Reasoners: Integrating Probabilistic Reasoning and Decision-Making for Complex AI Systems
591

The joint probability distribution P(C, E) is given
by:
P(C, E) = P(C) · P(E|C)
where P(C) represents the independent probability
distribution over circumstantial factors, and P(E|C)
denotes the conditional probability distribution over
ethical prescripts given circumstantial factors.
This joint distribution forms the basis for calcu-
lating expected values associated with various ethical
actions, facilitating coherent and contextually rele-
vant decision-making in uncertain environments. For
example, in a healthcare setting where P(c
1
) repre-
sents a critical patient status and P(e
2
|c
1
) indicates a
high priority for life-saving actions, the joint proba-
bility P(c
1
, e
2
) will strongly influence the agent’s de-
cision to pursue life-saving interventions.
The joint probability distribution also supports
the calculation of expected utility for each potential
action, a process that quantifies the expected value
of decisions by factoring in both ethical priorities
and contextual conditions (Russell and Norvig, 2016;
Von Neumann and Morgenstern, 2007). Formally, the
expected utility for an action a can be defined as:
U(a|C, E) =
n
∑
i=1
m
∑
j=1
P(c
i
) · P(e
j
|c
i
) · u(a|c
i
, e
j
)
where u(a|c
i
, e
j
) represents the utility of action a un-
der circumstantial factor c
i
and ethical prescript e
j
.
The action that maximizes expected utility is selected
as the optimal decision:
a
∗
= argmax
a∈A
U(a|C, E)
This calculation enables the agent to prioritize actions
that align with both ethical imperatives and situa-
tional demands, ensuring principled, context-sensitive
decision-making.
2.3 Normalized Collection with Matrix
Representation
A standardized method for structuring ethical prior-
ities and contextual factors supports consistent yet
adaptable decision-making across diverse scenarios.
Normalized collections, which organize ethical pre-
scripts and circumstantial dicta into reusable matri-
ces, help address shifting contexts and interdependen-
cies, ensuring scalable ethical reasoning (Strehl and
Ghosh, 2002).
Each ethical scenario is encapsulated in a matrix
M = [m
i j
], where each entry m
i j
denotes the weighted
influence of ethical prescript e
i
in the context of cir-
cumstantial factor c
j
. Here:
m
i j
= w(e
i
, c
j
) · P(e
i
|c
j
)
where w(e
i
, c
j
) represents a baseline weight or rele-
vance of ethical prescript e
i
under the circumstantial
factor c
j
, and P(e
i
|c
j
) is the conditional probability
derived from the previous probabilistic model, indi-
cating the likelihood of prioritizing e
i
given c
j
.
This matrix structure M captures a unique ethi-
cal profile for each scenario, reflecting the contextual-
ized relevance of ethical prescripts in structured form.
Mathematically, this matrix is defined as:
M =
m
11
m
12
. . . m
1n
m
21
m
22
. . . m
2n
.
.
.
.
.
.
.
.
.
.
.
.
m
m1
m
m2
. . . m
mn
2.3.1 Construction and Normalization of the
Collection
The normalized collection, denoted N =
{M
1
, M
2
, . . . , M
k
}, is a standardized set of matri-
ces, each representing an ethical profile drawn from
various contexts. Normalization is a crucial process
here to allow comparisons and coherence across these
profiles, ensuring consistency in the application of
ethical prescripts across diverse scenarios.
To achieve normalization, each matrix entry m
i j
is
scaled to a defined range, such as [0, 1], so that eth-
ical prescripts retain consistent relative significance
across contexts. Formally, the normalization process
for any matrix M
i
∈ N is expressed as:
M
norm
i
=
M
i
− min(M
i
)
max(M
i
) − min(M
i
)
where max(M
i
) and min(M
i
) are the maximum and
minimum values in M
i
, respectively. This normalized
form M
norm
i
ensures that ethical profiles across differ-
ent contexts can be applied and interpreted uniformly,
allowing for adaptability (Pearl, 2014; Koller, 2009).
2.3.2 Ensemble Coding and Clustering of
Ethical Profiles for Efficient Contextual
Retrieval
To further enhance adaptability, identifying shared
ethical priorities and contextual influences enables the
agent to generalize ethical decision-making from one
scenario to another. The process includes grouping
profiles with similar ethical prescript priorities and
contextual factors, allowing the agent to identify and
apply ethical principles across scenarios with related
patterns. For instance, scenarios in autonomous driv-
ing that share similar road conditions, pedestrian pres-
ence, and weather may be grouped to ensure ethi-
cal priorities are maintained consistently across these
conditions (Ariely, 2001).
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
592

To organize the normalized collection for effec-
tive retrieval and application, Cluster Ensemble tech-
niques (Strehl and Ghosh, 2002) are employed to
arrange matrices by similarity, facilitating efficient
access to relevant ethical profiles. This clustering
method groups ethical profiles based on shared at-
tributes, simplifying retrieval for contexts that align
closely with previously encountered scenarios.
Given clusters {C
1
,C
2
, . . . ,C
k
}, a new scenario
represented by matrix M
x
is assigned to the most rel-
evant cluster C
k
by calculating the distance metric
d(M
x
, M
y
) between M
x
and each matrix M
y
in the col-
lection:
d(M
x
, M
y
) =
m
∑
i=1
n
∑
j=1
|m
(x)
i j
− m
(y)
i j
|
where m
(x)
i j
and m
(y)
i j
are the entries in matrices M
x
and
M
y
, respectively. This clustering ensures the ethical
reasoner can retrieve and apply ethical principles ef-
fectively across varying but related contexts.
By integrating normalization, ensemble coding,
and clustering, the normalized collection supports
consistent and contextually adaptive ethical reason-
ing. This organized repository enables the agent to
handle a wide variety of real-world scenarios, apply-
ing ethical principles in a principled yet flexible man-
ner.
2.3.3 Non-Deterministic Models for Action
Selection
In ethical reasoning systems, certain scenarios may
allow for multiple ethically acceptable actions, each
aligned with relevant ethical prescripts but varying
in their potential outcomes. To address this com-
plexity, non-deterministic modeling provides a mech-
anism for probabilistically weighing and selecting ac-
tions based on their ethical impact. This model al-
lows the ethical reasoner to account for ethical flexi-
bility while maintaining adherence to prioritized eth-
ical principles.
We define probability distribution over actions
A = {a
1
, a
2
, . . . , a
k
} as the set of all potential actions
available to the agent in a given scenario. Each ac-
tion a ∈ A is associated with a selection probability
P(a|C, E), which represents the likelihood of choos-
ing a given a combination of circumstantial factors C
and ethical prescripts E.
The action probability distribution P(A|C, E) is
formally expressed as:
P(A|C, E) = {P(a|C, E) | a ∈ A}
where each P(a|C, E) is calculated by factoring in
both the ethical prescripts relevant to the specific con-
text and the probabilities derived from the normal-
ized collection. This distribution ensures that each
action’s likelihood is proportionate to its ethical rel-
evance, making ethical decision-making probabilisti-
cally flexible across contexts.
2.3.4 Expected Utility for Action Selection
To determine the action that best aligns with ethical
objectives, an expected utility function U(a|C, E) is
defined for each action a in the context of circumstan-
tial factors C and ethical prescripts E (Von Neumann
and Morgenstern, 2007). The expected utility repre-
sents the ethical value or desirability of each action,
allowing the reasoner to make decisions that maxi-
mize ethical alignment.
The optimal action a
∗
is selected based on the ex-
pected utility, expressed as (refer to Section 2.2.3):
a
∗
= argmax
a∈A
∑
c∈C
∑
e∈E
P(c) · P(e|c) ·U (a|c, e)
where U(a|c, e) represents the utility associated with
action a under a specific circumstantial factor c and
ethical prescript e and P(c) is the probability of each
circumstantial factor, and P(e|c) is the conditional
probability of each ethical prescript given the context.
By maximizing expected utility, this model en-
ables the ethical agent to select an action that aligns
with prioritized ethical objectives while factoring in
context-driven variability. For example, in an au-
tonomous vehicle scenario, if ethical prescripts em-
phasize both minimizing harm and respecting pedes-
trian safety, the expected utility function can weigh
these prescripts against circumstantial factors to iden-
tify the most ethically appropriate action among avail-
able options.
2.3.5 Multi-Objective Optimization
In complex ethical decision-making, multiple ob-
jectives may need to be optimized simultaneously
(Keeney, 1993; Coello, 2006). Multi-objective opti-
mization enables the agent to balance competing ethi-
cal prescripts, ensuring that no single ethical directive
disproportionately influences the decision at the ex-
pense of others.
Formally, this approach introduces a weighted
utility function:
U(a|C, E) =
m
∑
j=1
α
j
·U
j
(a|C, e
j
)
where U
j
(a|C, e
j
) is the utility associated with action
a in relation to ethical prescript e
j
and α
j
represents
the weight assigned to each ethical prescript e
j
, re-
flecting its relative importance in the context of cir-
cumstantial factors.
Towards Developing Ethical Reasoners: Integrating Probabilistic Reasoning and Decision-Making for Complex AI Systems
593

Through this multi-objective framework, the eth-
ical reasoner is equipped to make balanced deci-
sions that satisfy multiple ethical objectives simulta-
neously. The weight α
j
can be dynamically adjusted
based on contextual elements, allowing the system to
adaptively balance ethical prescripts as situational de-
mands evolve.
2.3.6 Integrating Non-Deterministic Models
with Normalized Collection
The non-deterministic model is inherently connected
to the normalized collection in that the probabilistic
weights assigned to each action reflect the ethical pri-
orities derived from the collection’s matrix represen-
tation. Each matrix M
i
in the normalized collection
serves as a reference for determining the relative im-
portance of ethical prescripts, and by extension, the
probability distribution over actions.
When a scenario is encountered, the correspond-
ing matrix from the normalized collection provides
context-specific weights for ethical prescripts, influ-
encing the probability distribution P(A|C, E) over
possible actions. This integration ensures that the
ethical reasoner’s decision-making is not only prob-
abilistically flexible but also rooted in consistent ethi-
cal principles across diverse contexts.
By combining non-deterministic modeling, ex-
pected utility, and multi-objective optimization, this
approach enables the ethical agent to navigate com-
plex decision scenarios, balancing ethical princi-
ples with situational sensitivity. This layered model
serves as the basis for robust, adaptable, and ethically
grounded action selection in uncertain environments.
3 THEORETICAL
FOUNDATIONS AND DESIRED
THEOREMS
In this section, we aim to set foundational condi-
tions that provide clarity on how an ethical system
behaves under varied circumstances. These prin-
ciples—consistency, optimality, robustness, conver-
gence, and alignment with human judgment—are es-
sential pillars for ensuring correctness in ethical com-
putations. By defining these properties, we not only
articulate the expected behaviors of ethical agents but
also create a basis for proving correctness, stabil-
ity, and effectiveness. We provide sample theorems
and strategies for proving their validity, offering a
roadmap for substantiating each core attribute of the
system’s ethical reasoning with appropriate analytical
techniques.
Theorem 1 (Ethical Consistency): Ethical consis-
tency ensures stable prioritization using metrics like
cosine similarity or KL divergence, so small changes
in context result in proportionate changes in ethical
decisions. Specifically, for any two sets of circum-
stantial dicta, C
1
and C
2
, where C
1
≈ C
2
, the prob-
ability distributions over ethical prescripts should be
approximately the same:
∀C
1
,C
2
∈ C, if C
1
≈ C
2
, then P(E|C
1
) ≈ P(E|C
2
).
This statement ensures that if two situational con-
texts, C
1
and C
2
, are nearly identical, then the sys-
tem’s ethical priorities—represented by the distribu-
tion P(E|C) over ethical prescripts—should not vary
disproportionately. Such stability prevents minor con-
textual differences from causing erratic or unpre-
dictable shifts in ethical decisions, a foundational re-
quirement for reliable ethical decision-making in real-
world applications.
To formalize the concept of “similar” contexts,
we introduce a similarity metric d(C
1
,C
2
) over the
space of circumstantial dicta. This metric quantifies
the ”distance” between two sets of circumstantial fac-
tors, where contexts C
1
and C
2
are considered similar
if d(C
1
,C
2
) ≤ δ for a small threshold δ. This thresh-
old δ represents the maximum allowable contextual
variation for two scenarios to be treated as similar in
the system’s ethical reasoning process.
To support the claim that P(E|C) remains stable
across similar contexts, a Lipschitz continuity condi-
tion (Belle, 2023; Rudin et al., 1964; Boyd and Van-
denberghe, 2004) can be applied to P(E|C). This con-
tinuity condition ensures that there exists a constant
L > 0 such that:
∥P(E|C
1
) − P(E|C
2
)∥ ≤ L · d(C
1
,C
2
),
where ∥ · ∥ represents an appropriate norm (such
as the L
1
norm or total variation distance) that
measures the difference between the distributions
P(E|C
1
) and P(E|C
2
). This condition guarantees that
small variations in circumstantial contexts C produce
only proportionally small variations in P(E|C). The
Lipschitz constant L thus provides a bound on the
degree of ethical priority change as the context shifts,
establishing a formalized level of stability. The
theorem’s significance lies in its ability to confirm
that the system’s ethical responses will remain robust
under minor contextual changes. By ensuring that
similar contexts yield consistent ethical prioritization,
we underpin the reliability of the system’s ethical
decision-making, thus contributing to predictable,
stable, and ethically sound behavior across varying
but comparable scenarios.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
594

Theorem 2 (Decision Optimality): Optimal deci-
sions maximize expected utility through weighted
multi-objective optimization, where utility values are
derived from stakeholder-defined priorities or empiri-
cal data. This can be mathematically expressed as:
Optimal Decision = arg max
D
n
∑
i=1
P(C
i
) ·U(D, E
i
),
where U(D, E
i
) denotes the utility of decision D under
ethical prescript E
i
, and P(C
i
) represents the probabil-
ity of circumstantial dictum C
i
.
Here, we want the formulation to capture the prin-
ciple that the system’s decisions should reflect a ra-
tional prioritization of ethical objectives, with each
possible decision evaluated based on its alignment
with ethical prescripts under specific contextual con-
ditions. By calculating the expected utility of each
decision as a weighted sum of the utilities under var-
ious circumstantial factors, the system can select the
decision that provides the greatest alignment with eth-
ical principles in the given scenario. To frame this
mathematically, the expected utility of a decision D,
denoted E[U(D)], is given by:
E[U(D)] =
n
∑
i=1
P(C
i
) ·U(D, E
i
).
Here, the term P(C
i
)·U(D, E
i
) represents the con-
tribution of each circumstantial factor C
i
and its as-
sociated ethical prescript E
i
to the overall utility of
decision D. The optimization problem is thus to iden-
tify the decision D that maximizes this expected util-
ity, selecting the action with the highest ethical align-
ment.
To ensure an optimal solution for expected utility
maximization, certain conditions are required. The
utility function U(D, E
i
) must be continuous to avoid
abrupt changes in utility due to small variations in de-
cisions or context. Additionally, if the utility function
is bounded, it ensures that the optimization process
remains well-defined, preventing infinite utility val-
ues.
Achieving decision optimality involves several
steps. First, the expected utility E[U(D)] for each
potential decision D is formulated by calculating a
weighted sum of circumstantial factors and ethical
prescripts, with each weight reflecting the relevance
of specific contextual elements. This expected
utility is then framed as an optimization problem to
maximize E[U(D)], turning the decision selection
into a solvable problem. Finally, verifying that
conditions such as the continuity and boundedness of
the utility function are met ensures that the solution
is both practically feasible and theoretically sound,
resulting in an optimal, ethically aligned decision. By
maximizing expected utility, the system ensures that
decisions reflect a balanced consideration of ethical
priorities and context.
Theorem 3 (Robustness Under Uncertainty): An
ethical decision-making system is robust if small vari-
ations in the probability distributions of circumstan-
tial dicta P(C) result in proportionately small changes
in the decision outcome F(D|C). This robustness can
be formally expressed as:
∀ε > 0, ∃δ > 0 such that if |P(C) − P(C
′
)| < δ,
then |F(D|C) − F(D|C
′
)| < ε.
where, P(C) and P(C
′
) denote the probability distri-
butions over circumstantial dicta for two similar con-
texts, and F(D|C) represents the decision function for
a given decision D given the context C.
This expression asserts that for any desired degree
of stability ε in the decision outcome, there exists a
threshold δ for changes in the probability distribution
of circumstantial factors. As long as changes in P(C)
remain within this δ threshold, the corresponding de-
cision F(D|C) will change by no more than ε.
To establish robustness under uncertainty, the ap-
proach includes several key steps. First, a sensitivity
analysis of the decision function F(D|C) is conducted
by introducing a small perturbation in the probability
distribution of circumstantial dicta P(C) and observ-
ing its effect on F(D|C). This step involves deriv-
ing mathematical bounds on the impact of changes
in P(C) on the decision outcome, which can often be
achieved through Lipschitz continuity (Rudin et al.,
1964; Boyd and Vandenberghe, 2004). A Lipschitz
condition would imply that there exists a constant K
such that:
|F(D|C) − F(D|C
′
)| ≤ K|P(C) − P(C
′
)|,
where K is a bound on the sensitivity of the decision
function with respect to changes in P(C). This con-
dition ensures that the decision function’s response to
contextual changes is proportional and does not ex-
ceed the threshold of stability.
In simpler terms, this theorem offers a formal
way to assess the system’s ability to remain stable
despite small changes in input data. By ensuring this
robustness, the system can handle minor variations
in context without affecting the reliability or con-
sistency of its ethical decision-making, maintaining
trustworthiness across similar but slightly different
situations.
Theorem 4 (Convergence of Ethical Decision-
Making): In a learning-based ethical decision-
making system, the system’s policy is said to con-
verge if, over time and repeated exposure to similar
Towards Developing Ethical Reasoners: Integrating Probabilistic Reasoning and Decision-Making for Complex AI Systems
595

contexts, the probability of selecting a particular de-
cision given certain circumstantial dicta becomes sta-
ble. This convergence is essential for systems that
learn from experience, as it ensures that with increas-
ing data, the system’s decisions reach a predictable
and consistent pattern, ultimately leading to stable,
ethically sound behavior.
The convergence property can be formally stated
as:
lim
t→∞
P(D
t+1
= D|C
t
= C) = 1,
where, D
t
is the decision made at time t, C
t
repre-
sents the set of circumstantial dicta at time t, and
P(D
t+1
= D|C
t
= C) is the probability that the system
will continue to select decision D under the circum-
stances represented by C as time progresses.
Through the statement, we asserts that, as the sys-
tem gains more experience with context C over time,
the probability of making a specific decision D given
C approaches certainty. In practical terms, this means
that the system “learns” from its experiences, even-
tually developing a stable and repeatable pattern of
ethical decisions in familiar contexts.
The concept of convergence in decision-making is
particularly relevant for systems that adapt based on
data, such as those employing reinforcement learning
or iterative improvement. Convergence implies that
the ethical decision-making policy becomes stable
and predictable over time, resulting in a system that
behaves reliably and in accordance with predefined
ethical standards. For instance, in an autonomous
vehicle system, this would mean that as the vehicle
encounters similar road scenarios repeatedly, its re-
sponses to those scenarios converge, leading to a con-
sistent pattern of decision-making aligned with ethi-
cal priorities like pedestrian safety. To demonstrate
convergence, the strategy generally involves model-
ing the learning dynamics as a stochastic process or
Markov decision process (MDP), where the probabil-
ity distribution over decisions given a set of circum-
stantial factors evolves over time. Proving conver-
gence often requires showing that the policy updates
diminish over time, for instance by using a decreas-
ing learning rate in reinforcement learning, ensuring
that the updates become smaller as more data accu-
mulates. Additionally, fixed-point theory (Hadzic and
Pap, 2013) may be applied to identify stable points in
the learning process—decisions that do not change as
the system iterates through similar scenarios.
Establishing convergence involves several key
steps. First, the system’s learning dynamics are
modeled as a dynamical system, where decision
policy updates are influenced by past outcomes and
accumulated experiences. This allows the system’s
behavior to be analyzed as it adapts. Next, stability
is demonstrated using tools from dynamical systems
and probability theory, showing that policy adjust-
ments decrease over time, signaling convergence to
a stable state. Finally, limit behavior is proven by
showing that, in a given context, the probability of
selecting a particular decision stabilizes, ensuring
consistent adherence to ethical principles in recurring
scenarios.
Theorem 5 (Alignment with Human Ethical Judg-
ments): An ethical decision-making model achieves
alignment with human ethical judgments when the
system’s decisions correspond closely to human de-
cisions in similar contexts. Formally, this alignment
is measured by the correlation between the model’s
decisions, D
model
, and human decisions, D
human
, ex-
pressed as:
Corr(D
model
, D
human
) > θ,
where, Corr represents a correlation function that
measures the degree of similarity between the deci-
sions made by the model and those made by humans,
D
model
are the decisions made by the model, D
human
are the decisions made by humans, and θ is a prede-
fined threshold indicating acceptable alignment.
Here, we suggest that an ethical AI system’s de-
cisions should mirror human ethical reasoning to a
significant degree, particularly in complex or morally
ambiguous situations. Achieving this alignment en-
sures that the system’s ethical reasoning aligns with
commonly accepted moral standards, enhancing its
social acceptability and trustworthiness.
Alignment with human judgments in an ethical AI
system is achieved through a blend of empirical data
collection and statistical evaluation. First, data on hu-
man decisions is gathered across a variety of scenarios
and contexts that the model is likely to encounter, al-
lowing for a direct comparison between the model’s
choices and human decisions. This comparison in-
volves evaluating the model’s responses in each sce-
nario relative to those made by human subjects, estab-
lishing a basis for assessing alignment. Next, statisti-
cal methods are employed to calculate the correlation
between the model’s decisions and human decisions,
providing a quantitative measure of alignment. The
strength of this correlation serves as an indicator of
how closely the model’s ethical reasoning mirrors that
of humans. Finally, the correlation is assessed against
a predefined threshold θ, with high correlation values
indicating strong alignment. If the correlation falls
below this threshold, it suggests that the model may
require adjustments to better align with human ethi-
cal standards. By aligning its decisions with human
judgments, the model gains a measure of validation
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
596

against human moral reasoning, which is crucial for
building ethical AI systems that are consistent with
societal expectations and norms.
4 DISCUSSION
The central theme of our work so far has been the
use of circumstantial dicta, ethical prescripts, and in-
termediate representations (IRs) to deconstruct com-
plex ethical dilemmas into manageable subgoals, al-
lowing for adaptability in changing contexts while
maintaining alignment with core ethical principles.
However, practical implementation introduces chal-
lenges, particularly in quantifying ethical priorities
in real-time, stabilizing decision-making in variable
contexts, and addressing diverse real-world scenarios.
Ethical dilemmas, such as those embodied in the clas-
sic trolley problem, illustrate the difficulty of translat-
ing philosophical reasoning into computational pro-
cesses. These dilemmas are shaped by cultural, soci-
etal, and historical constructs, often involving mul-
tiple potential equilibria. Computational systems
must navigate these moral ambiguities while address-
ing the trade-offs inherent in real-world decision-
making. The challenge lies in ensuring that the un-
derlying ethical reasoning framework remains consis-
tent across various contexts while acknowledging that
moral judgments often hinge on subjective, culturally
influenced factors.
Advancing ethical reasoning systems necessitates
drawing from interdisciplinary insights, particularly
from the social sciences. Trust, agent relationships,
and affective dimensions play pivotal roles in shaping
ethical cognition, especially in multi-agent systems
(Etzioni and Etzioni, 2017). Misalignments in ethi-
cal reasoning between agents can erode trust and hin-
der collective decision-making, a particularly com-
plex issue in scenarios with conflicting ethical goals
or shared ethical objectives. Understanding the dy-
namics of individual agent behavior within collective
decision-making processes is essential for building
systems that can navigate such complexities. Game
theory offers tools for analyzing collective action and
ethical decision-making at the group level (Ostrom,
2000; Coleman, 2017). Concepts like correlated
equilibria and coordination games provide valuable
frameworks for understanding how individual ethical
judgments aggregate into collective moral behavior,
especially in multi-agent systems where cooperation
or competition is critical.
Incorporating human affective dimensions re-
mains a challenge in computational models but is
crucial for aligning AI systems with human values.
Insights from neuroeconomics, social sciences, and
affective neuroscience provide avenues for integrat-
ing emotion-driven, normative aspects into AI sys-
tems (Guzak, 2014). Embedding these affective el-
ements enhances the alignment of AI systems with
human values, fostering adaptability in complex, real-
world scenarios. Additionally, meta-ethical consid-
erations, such as the nature of moral principles and
their justification, play an essential role in guiding AI
design (Hagendorff, 2020). Should AI systems fol-
low universal ethical principles, or should they adapt
to culturally specific moral frameworks? Balancing
these approaches ensures that AI systems respect di-
verse moral values while maintaining consistency in
decision-making.
Intermediate representations are pivotal for en-
abling hierarchical reasoning, which allows ethical
decision-making to span multiple levels of abstrac-
tion. By decomposing overarching objectives into ac-
tionable subgoals, this framework offers a modular
approach to managing ethical complexity. However,
applying hierarchical reasoning within probabilistic
and non-deterministic systems remains an underex-
plored area that demands rigorous empirical testing to
ensure practical applicability. The challenge of align-
ing system outputs with human ethical judgments per-
sists, especially in probabilistic settings where the
uncertainty of outcomes needs to be accounted for.
Although probabilistic reasoning formalizes ethical
principles, aligning these with human moral stan-
dards remains an ongoing challenge. Defining bench-
marks, gathering diverse datasets, and setting align-
ment thresholds are necessary steps for progress. In
particular, reinforcement learning, while valuable for
optimizing decision-making, carries risks of ethical
drift if not carefully monitored. Ensuring that reward
functions remain aligned with ethical goals and that
updates to policies reflect human ethical intuitions is
a critical concern.
Bridging the gap between theoretical frameworks
and practical applications requires substantial empir-
ical testing. Validation through simulations, such
as autonomous driving scenarios, will benchmark
the system’s ethical decision-making against human
judgments, helping to identify discrepancies and re-
fine the framework. Adherence to current stan-
dards like IEEE P7001 ensures that the system aligns
with ethical protocols recognized in the field of au-
tonomous systems (Winfield et al., 2021), which con-
tributes to the robustness and practical applicability
of the proposed framework. Observing emergent be-
haviors through simulations, such as those inspired
by the Ethics microworld simulator (Kavathatzopou-
los et al., 2007), provides critical insights into soci-
Towards Developing Ethical Reasoners: Integrating Probabilistic Reasoning and Decision-Making for Complex AI Systems
597

etal implications. Social simulation frameworks, like
those used for studying multi-agent ethical systems
(Ghorbani et al., 2013; L
´
opez-Paredes et al., 2012;
Mercuur et al., 2019), offer valuable methodologies
for exploring how individual moral decisions aggre-
gate into collective behavior. These frameworks are
instrumental in studying complex multi-agent interac-
tions and the ethical dilemmas that emerge from them.
By integrating interdisciplinary insights, struc-
tured reasoning, and probabilistic modeling, this work
lays out a foundational framework for the develop-
ment of adaptive, ethically aligned AI systems. How-
ever, realizing this vision will require iterative re-
finement and extensive empirical validation. Ad-
ditionally, continued engagement with philosophical
and social dimensions is necessary to address the
inherent complexities of real-world moral decision-
making. The challenges associated with context-
dependent values, the quantification of utility, and
the management of interrelated ethical prescriptions
all point to the need for more comprehensive mecha-
nisms to handle dynamic and uncertain ethical scenar-
ios. Only through such comprehensive efforts can we
build AI systems capable of navigating the complex-
ities of moral decision-making in diverse, real-world
settings.
5 CONCLUSION
This paper introduces the necessary components
for developing computational ethics frameworks,
focusing on the integration of probabilistic, non-
deterministic, and context-sensitive models. While
the approach lays a strong foundation, challenges re-
main in building adaptive systems capable of navigat-
ing the complexities of real-world ethical dilemmas.
Moving forward, further refinement, empirical test-
ing, and cross-disciplinary collaboration are needed
to ensure these systems can be practically deployed
in diverse, unpredictable environments.
REFERENCES
Anderson, M., Anderson, S., and Armen, C. (2005). To-
wards machine ethics : Implementing two action-
based ethical theories. In AAAI Fall Symposium.
Anderson, M., Anderson, S., and Armen, C. (2006). An ap-
proach to computing ethics. IEEE Intelligent Systems,
21(4):56–63.
Andrade, G. (2019). Medical ethics and the trolley problem.
Journal of Medical Ethics and History of Medicine,
12.
Ariely, D. (2001). Seeing sets: Representation by statistical
properties. Psychological Science, 12(2):157–162.
Awad, E., Levine, S., Anderson, M., Anderson, S. L.,
Conitzer, V., Crockett, M., Everett, J. A., Evgeniou,
T., Gopnik, A., Jamison, J. C., Kim, T. W., Liao,
S. M., Meyer, M. N., Mikhail, J., Opoku-Agyemang,
K., Borg, J. S., Schroeder, J., Sinnott-Armstrong,
W., Slavkovik, M., and Tenenbaum, J. B. (2022).
Computational ethics. Trends in Cognitive Sciences,
26(5):388–405.
Beckers, S., Chockler, H., and Halpern, J. (2022). A causal
analysis of harm. Advances in Neural Information
Processing Systems, 35:2365–2376.
Beckers, S., Chockler, H., and Halpern, J. (2023). Quan-
tifying harm. In Proceedings of the 32nd Interna-
tional Joint Conference on Artificial Intelligence (IJ-
CAI 2023).
Belle, V. (2020). Symbolic Logic Meets Machine Learn-
ing: A Brief Survey in Infinite Domains. In Davis, J.
and Tabia, K., editors, Scalable Uncertainty Manage-
ment, volume 12322, pages 3–16. Springer Interna-
tional Publishing, Cham. Series Title: Lecture Notes
in Computer Science.
Belle, V. (2023). Knowledge representation and acquisition
for ethical AI: challenges and opportunities. Ethics
and Information Technology, 25(1):22.
Belle, V. and Levesque, H. (2015). ALLEGRO: Belief-
Based Programming in Stochastic Dynamical Do-
mains. In Proceedings of the Twenty-Fourth Interna-
tional Joint Conference on Artificial Intelligence (IJ-
CAI 2015).
Bentham, J. (2003). An introduction to the principles of
morals and legislation (chapters i–v). In Utilitarian-
ism and on Liberty, pages 17–51. Blackwell Publish-
ing Ltd.
Bonnefon, J.-F., Shariff, A., and Rahwan, I. (2016). The
social dilemma of autonomous vehicles. Science,
352(6293):1573–1576.
Boyd, S. and Vandenberghe, L. (2004). Convex optimiza-
tion. Cambridge university press.
Coello, C. C. (2006). Evolutionary multi-objective opti-
mization: a historical view of the field. IEEE com-
putational intelligence magazine, 1(1):28–36.
Coleman, J. (2017). The mathematics of collective action.
Routledge.
Dennis, L., Fisher, M., Slavkovik, M., and Webster, M.
(2016a). Formal verification of ethical choices in au-
tonomous systems. Robotics and Autonomous Sys-
tems, 77:1–14.
Dennis, L. A., Fisher, M., Lincoln, N. K., Lisitsa, A.,
and Veres, S. M. (2016b). Practical verification of
decision-making in agent-based autonomous systems.
Automated Software Engineering, 23(3):305–359.
Etzioni, A. and Etzioni, O. (2017). Incorporating Ethics
into Artificial Intelligence. The Journal of Ethics,
21(4):403–418.
Foot, P. (1967). The problem of abortion and the doctrine
of double effect. Oxford, 5:5–15.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
598

Ganascia, J.-G. (2007). Modelling ethical rules of lying
with Answer Set Programming. Ethics and Informa-
tion Technology, 9(1):39–47.
Ghaderi, H., Levesque, H., and Lesp
´
erance, Y. (2007). To-
wards a logical theory of coordination and joint abil-
ity. In Proceedings of the 6th international joint con-
ference on Autonomous agents and multiagent sys-
tems, AAMAS ’07, pages 1–3, New York, NY, USA.
Association for Computing Machinery.
Ghorbani, A., Dignum, V., Bots, P., and Dijkema, G. (2013).
Maia: a framework for developing agent-based social
simulations. JASSS-The Journal of Artificial Societies
and Social Simulation, 16(2):9.
Gilpin, L. H., Bau, D., Yuan, B. Z., Bajwa, A., Specter,
M. A., and Kagal, L. (2018). Explaining explanations:
An overview of interpretability of machine learning.
In 2018 IEEE 5th International Conference on Data
Science and Advanced Analytics (DSAA), pages 80–
89.
Goodall, N. J. (2014). Machine ethics and automated vehi-
cles. Road vehicle automation, pages 93–102.
Guzak, J. R. (2014). Affect in ethical decision making:
Mood matters. Ethics & Behavior, 25(5):386–399.
Hadzic, O. and Pap, E. (2013). Fixed point theory in prob-
abilistic metric spaces, volume 536. Springer Science
& Business Media.
Hagendorff, T. (2020). The ethics of ai ethics: An evalu-
ation of guidelines. Minds and machines, 30(1):99–
120.
Islam, R., Keya, K. N., Pan, S., Sarwate, A. D., and Foulds,
J. R. (2023). Differential Fairness: An Intersectional
Framework for Fair AI. Entropy, 25(4):660. Num-
ber: 4 Publisher: Multidisciplinary Digital Publishing
Institute.
Kavathatzopoulos, I., Laaksoharju, M., and Rick, C. (2007).
Simulation and support in ethical decision making.
Globalisation: Bridging the global nature of Infor-
mation and Communication Technology and the local
nature of human beings, pages 278–287.
Keeney, R. L. (1993). Decisions with multiple objectives:
Preferences and value tradeoffs. Cambridge univer-
sity press.
Kleiman-Weiner, M., Saxe, R., and Tenenbaum, J. B.
(2017). Learning a commonsense moral theory. Cog-
nition, 167:107–123.
Koller, D. (2009). Probabilistic Graphical Models: Princi-
ples and Techniques. The MIT Press.
Krarup, B., Lindner, F., Krivic, S., and Long, D. (2022).
Understanding a robot’s guiding ethical principles via
automatically generated explanations. In 2022 IEEE
18th International Conference on Automation Science
and Engineering (CASE), pages 627–632, Mexico
City. IEEE Xplore.
Levesque, H. J. (1986). Knowledge representation and
reasoning. Annual Review of Computer Science,
1(1):255–287.
Lockhart, T. (2000). Moral uncertainty and its conse-
quences. Oxford University Press, New York.
L
´
opez-Paredes, A., Edmonds, B., and Klugl, F. (2012).
Agent based simulation of complex social systems.
Mercuur, R., Dignum, V., and Jonker, C. (2019). The value
of values and norms in social simulation. Journal of
Artificial Societies and Social Simulation, 22(1):1–9.
Moor, J. H. (1995). Is ethics computable? Metaphilosophy,
26(1/2):1–21.
Moor, J. H. (2006). The nature, importance, and diffi-
culty of machine ethics. IEEE Intelligent Systems,
21(4):18–21.
Ostrom, E. (2000). Collective action and the evolution
of social norms. Journal of economic perspectives,
14(3):137–158.
Pearl, J. (2014). Probabilistic reasoning in intelligent sys-
tems: networks of plausible inference. Elsevier.
Rahman, M. M., Pan, S., and Foulds, J. R. (2024). Towards
A Unifying Human-Centered AI Fairness Framework.
In Proceedings of the 2024 International Conference
on Information Technology for Social Good, GoodIT
’24, pages 88–92, New York, NY, USA. Association
for Computing Machinery.
Ross, D. (2002). The Right and the Good. Oxford Univer-
sity Press.
Rudin, W. et al. (1964). Principles of mathematical analy-
sis, volume 3. McGraw-hill New York.
Russell, S. J. and Norvig, P. (2016). Artificial intelligence:
a modern approach. Pearson.
Ruvinsky, A. I. (2007). Computational ethics. In Encyclo-
pedia of Information Ethics and Security, pages 76–
82. IGI Global.
Sanner, S. and Kersting, K. (2010). Symbolic Dynamic Pro-
gramming for First-order POMDPs. In Proceedings
of the AAAI Conference on Artificial Intelligence, vol-
ume 24, pages 1140–1146. Number: 1.
Segun, S. T. (2020). From machine ethics to computational
ethics. AI & SOCIETY.
Strehl, A. and Ghosh, J. (2002). Cluster ensembles A
knowledge reuse framework for combining partition-
ings. In Dechter, R., Kearns, M. J., and Sutton, R. S.,
editors, Proceedings of the Eighteenth National Con-
ference on Artificial Intelligence and Fourteenth Con-
ference on Innovative Applications of Artificial Intel-
ligence, July 28 - August 1, 2002, Edmonton, Alberta,
Canada, pages 93–99. AAAI Press / The MIT Press.
Von Neumann, J. and Morgenstern, O. (2007). Theory of
games and economic behavior: 60th anniversary com-
memorative edition. In Theory of games and economic
behavior. Princeton university press.
Winfield, A. F., Booth, S., Dennis, L. A., Egawa, T., Hastie,
H., Jacobs, N., Muttram, R. I., Olszewska, J. I., Ra-
jabiyazdi, F., Theodorou, A., et al. (2021). Ieee p7001:
A proposed standard on transparency. Frontiers in
Robotics and AI, 8:665729.
Zhang, J., Shu, Y., and Yu, H. (2023). Fairness in De-
sign: A Framework for Facilitating Ethical Artificial
Intelligence Designs. International Journal of Crowd
Science, 7(1):32–39. Conference Name: International
Journal of Crowd Science.
Towards Developing Ethical Reasoners: Integrating Probabilistic Reasoning and Decision-Making for Complex AI Systems
599
