
Simultaneous Simulated Annealing-Based Crossover Within a
Multi-Agent Model for Solving the Green Share-a-Ride Problem
Elhem Elkout
1,4 a
, Houssem Eddine Nouri
2,4 b
and Olfa Belkahla Driss
3,4 c
1
Ecole Nationale des Sciences de l’Informatique, University of Manouba, Tunisia
2
Institut Sup
´
erieur d’Informatique et de Gestion de Kairouan, University of Kairouan, Tunisia
3
Ecole Sup
´
erieure de Commerce de Tunis, University of Manouba, Tunisia
4
LARIA UR22ES01, Ecole Nationale des Sciences de l’Informatique, University of Manouba, Tunisia
Keywords:
Green Transport, Green Share-A-Ride Problem, Simulated Annealing, Crossover Operator, Multi-Agent.
Abstract:
This research addresses the Green share-a-ride problem (Green-SARP), which is an extension of the share-a-
ride problem (SARP) by considering a limited driving range of vehicles in combination with limited refueling
infrastructure. The goal of Green-SARP is to remove the possibility of a vehicle running out of fuel during
a route by allowing refueling at any alternative fuel station. In this work, we present a new simultaneous
Simulated Annealing-based Crossover within a Multi-Agent model (SAC-MA) to solve Green-SARP. In fact,
adding to the neighbor operators, the crossover operator is integrated to diversify the search allowing to explore
new areas in the search space. Experimental studies are carried out in order to evaluate the performance of
our approach, based on new generated data instances, allowing to show its efficiency compared to a Simulated
Annealing algorithm (SA).
1 INTRODUCTION
In recent years, numerous studies have focused on
the Share-a-Ride Problem (SARP) and its various ex-
tensions. First proposed by (Li et al., 2014), SARP
involves using taxis to simultaneously transport pas-
sengers and parcels, inspired by the well-established
Dial-a-Ride Problem (DARP) (Cordeau and Laporte:,
2007). While DARP aims to minimize total trans-
portation costs and enhance passenger service, SARP
introduces the dual objective of managing both pas-
senger transport and parcel delivery. The key assump-
tion in SARP is that passenger service takes prece-
dence over parcel delivery to ensure high-quality ser-
vice (Li et al., 2014). Initial solutions to the dynamic
SARP were developed using heuristic approaches, in-
cluding the insertion of unfulfilled requests into exist-
ing routes, followed by optimization through neigh-
borhood search.
Subsequent research on SARP has introduced en-
hancements and variants tailored to real-life urban
transportation scenarios. For example, (Nguyen et al.,
2015) proposed a hybrid transportation model for
a
https://orcid.org/0000-0001-7422-7951
b
https://orcid.org/0000-0003-0901-1278
c
https://orcid.org/0000-0003-3077-6240
Tokyo, enhancing realism by incorporating additional
constraints and a time slack strategy for route plan-
ning. This approach utilized the Adaptive Large
Neighborhood Search (ALNS) heuristic, which be-
gins with a basic greedy insertion of requests and ap-
plies simulated annealing as a local search method.
Several notable variants of SARP have also been
proposed. The General Share-a-Ride Problem (G-
SARP) (Yu et al., 2018) extends SARP by relax-
ing certain constraints, such as allowing vehicles to
serve multiple requests simultaneously without pri-
oritizing passenger or parcel service. To solve G-
SARP, a simulated annealing algorithm and a tabu
search were developed to evaluate its performance.
Similarly, (Beirigo et al., 2018) introduced the Share-
a-Ride with Parcel Lockers Problem (SARPLP), fo-
cusing on shared autonomous vehicles equipped with
flexible compartments for passengers and parcels.
Further developments include a time-dependent
model for SARP (Do et al., 2017), incorporating
speed windows to reflect realistic urban conditions.
Another extension, the cooperative SARP (coop-
SARP) (Cavagnini and Morandi, 2021), examines
collaboration between different service providers.
Additionally, (Yu et al., 2021) introduced the
Share-a-Ride Problem with Flexible Compartments
(SARPFC), which allows the passenger compartment
600
Elkout, E., Nouri, H. E. and Driss, O. B.
Simultaneous Simulated Annealing-Based Crossover Within a Multi-Agent Model for Solving the Green Share-a-Ride Problem.
DOI: 10.5220/0013314300003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 600-607
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

to be used for parcel storage, aiming to maximize rev-
enue.
Building on these advancements, the Green Share-
a-Ride Problem (Green-SARP) was proposed by
(Elkout and Belkahla, 2022) to address environmen-
tal concerns. Green-SARP combines the principles of
SARP with those of the Green Vehicle Routing Prob-
lem (GVRP), incorporating Alternative Fuel Vehicles
(AFVs) and the need for refueling at Alternative Fuel
Stations (AFS). This formulation aims to reduce the
environmental impact of shared mobility while main-
taining operational efficiency.
In 2023, (Elkout et al., 2023) introduced an en-
hanced Simulated Annealing algorithm with a Cor-
rection Mechanism (SA-CM) to solve Green-SARP.
Their experimental results demonstrated that SA-CM
could produce high-quality solutions close to the
optimal results obtained by CPLEX, outperforming
CPLEX for instances with more than 10 requests.
These findings highlight the potential of heuristic-
based methods to solve complex urban transportation
problems efficiently.
This innovative problem Green-SARP was first in-
troduced by (Elkout and Belkahla, 2022), by leverag-
ing the flexibility of AFVs and integrating AFS nodes
into the route design, the Green-SARP ensures the
sustainability of urban transport systems while meet-
ing the demands of modern shared mobility.
In this paper, we introduce a simultaneous Sim-
ulated Annealing-based Crossover within a Multi-
Agent model (SAC-MA) to solve Green-SARP. We
conduct computational experiments to assess the per-
formance of our approach, utilizing newly modified
data instances, and demonstrate its efficiency com-
pared to a Simulated Annealing algorithm (SA).
2 SIMULTANEOUS SIMULATED
ANNEALING-BASED
CROSSOVER WITHIN A
MULTI-AGENT MODEL
Simulated Annealing is a probabilistic meta-heuristic
algorithm, it is based on a natural technique that sim-
ulates the cooling of a group of heated atoms us-
ing an analogy to thermodynamics, a process known
as annealing (Kirkpatrick et al., 1983). Simulated
Annealing accepts search movements that temporar-
ily produce degradation of an existing solution to a
problem (Kirkpatrick et al., 1983). Simulated An-
nealing (SA) is a local neighborhood search that re-
quires exploring the search space and accepting so-
lutions with some probabilities (Davtyan and Khcha-
tryan, 2020). An artificial system composed of a
population of autonomous agents is called a multi-
agent system, in order to achieve their shared goals
the agents work cooperatively. Additionally, a multi-
agent system is a computational system in which two
or more agents cooperate, compete or combine their
efforts to accomplish some individual or group objec-
tives (Ferber, 1999). In this work, we propose a new
simultaneous Simulated Annealing-based Crossover
within a Multi-Agent model (SAC-MA) for solving
Green Share-A-Ride Problem. In addition, the fact
that Green-SARP is an NP-Hard problem, so the use
of a multi-agent system allows distributed and simul-
taneous processing, which are very complementary.
The multi-agent system is composed entirely of in-
teracting agents. Each agent can communicate, coor-
dinate and cooperate with other agents to complete a
common aim. It consists of two classes of agents: A
master-Agent (MA) and a set of Simulated-annealing
Agent (SimA) , where the MA agent is the Master of
its society and the SimA agents are its Workers/Sub-
agents. The figure 1 represents the proposed SAC-
MA approach.
2.1 Master Agent
It is the one who interacts with the user, the
master-agent (MA) receives the number of Simulated-
annealing Agents to create all parameters for the Sim-
ulated Annealing-based Crossover algorithm. It is
responsible of creating Simulated-annealing Agents
(SimA) based on the input number given by the user.
Then the MA generates an initial population with
different dynamic lists based only on pickup nodes.
Noting that the number of dynamic lists depend of
the number of the Simulated-annealing Agent given
by the user. So, the MA agent provides for each
worker-agent its necessary information such as the
agent identification (as an autonomous agent and also
as a system member), its dynamic list solution from
the initial population and the parameters for the Sim-
ulated Annealing-based Crossover algorithm. If the
stopping criterion is attained, the MA agent chooses
the best solution from the last solutions received from
Simulated-annealing Agents and displays it as the
global solution for the problem.
2.1.1 Solution Representation
The Green-SARP involves a depot, a set of requests,
and a set of AFS nodes. The answer to this prob-
lem provides 3 travels with 3 AFV each having a 60-
gallon fuel capacity and a consumption rate equal to
0.2.
Simultaneous Simulated Annealing-Based Crossover Within a Multi-Agent Model for Solving the Green Share-a-Ride Problem
601

Figure 1: Simultaneous Simulated Annealing-based Crossover within a Multi-Agent Model.
Figure 2 illustrates a sample solution represen-
tation and its interpretation into vehicle routes. As
shown in Figure 2, the first vehicle is assigned to visit
both passengers 1 and 3 and one parcel 7. The vehi-
cle requires more than 60 gallons to serve all affected
requests; thus, it decides to visit the AFS node. The
remaining vehicles are assigned similarly to how the
first vehicle. The solution representation for Green-
SARP consists of k dynamic lists. Each list comprises
numbers including a depot node, a set of pick-up and
drop-off nodes of the passenger and parcel demands,
and AFS nodes. The first and the last position in each
dynamic list must be respectively an origin and desti-
nation depot designate by 0. Each dynamic list repre-
sents a vehicle that must serve the different nodes one-
by-one from left to right. If the next node is a negative
number then the vehicle must visit an AFS node and
then continue its travel. To explain the Green-SARP, a
sample problem of 8 and 3 vehicles requests is shown
in figure 3, in table 3 we present all the necessary pa-
rameters:
In Figure 2, the first dynamic list illustrates the
route of the first vehicle. It starts at the depot and
Table 1: A simple instance of the Green-SARP.
Parameters Value
number of requests σ = 8
number of parcel re-
quests
m = 3 Vp,0=
{1,2,3,4,5} Vp,d=
{9,10,11,12,13}
number of passenger
requests +
n = 5 Vf,0 = {6, 7 ,8}
Vf,d = {14, 15 ,16}
number of vehicles K = 3
number of AFS f = 4
then visits some pick-up and delivery nodes when the
fuel remaining is not sufficient the vehicle visit AFS
node denote (-1) then continues its travel and returns
to the depot.
2.1.2 Population Initialization
The initial population is generated randomly to in-
crease the diversity and distribution of the individual
solutions in the search space. In fact, each new dy-
namic list solution is based only on pickup nodes and
should have a predefined distance from all the other
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
602
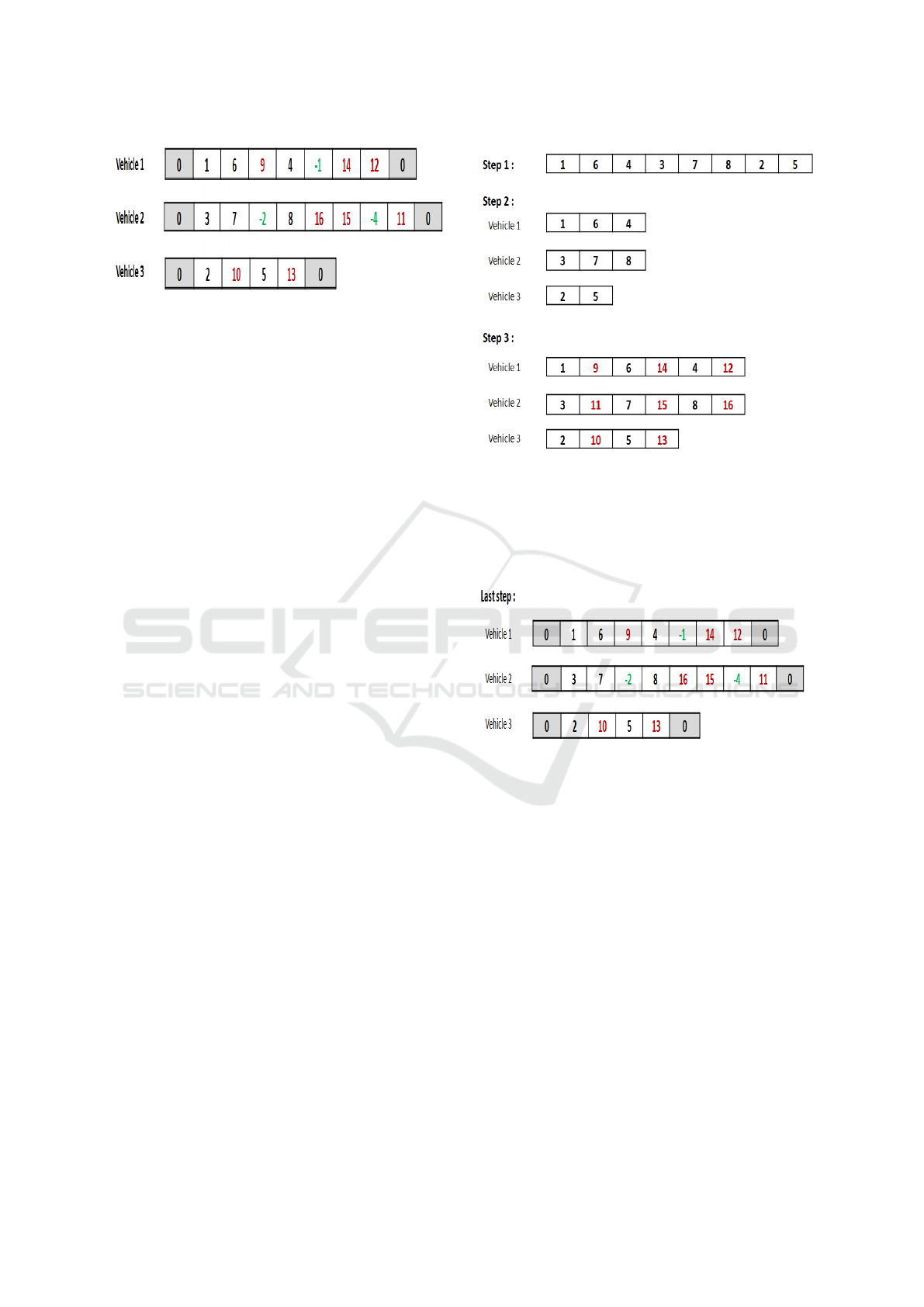
Figure 2: Solution representation for Green-SARP.
dynamic lists to be considered as a new member of the
initial population. The dissimilarity distance is cal-
culated by verifying the difference between two dy-
namic lists in terms of the pickup node order. Noting
that a new solution is accepted only if its greater than
a fixed threshold of difference equals to 50% percent-
age.
2.2 Simulated-Annealing Agent
Simulated-annealing Agent (SimA) are created by the
Master-Agent, where each one has its own search
space area. After generating its initial solution,
each SimA agent uses a Simulated Annealing-based
Crossover algorithm to explore the search space. To
improve the search technique, the SimA agents co-
operate and communicate by messages allowing to
share their best current solutions among them in order
to avoid in each case the reuse of the same research
point. SimA agents complete the process by sending
their last best solutions to the Master-Agent, which
considers the most dominant of them as the global so-
lution for the Green-SARP.
2.2.1 Individual’s Solution
The initial solution is created using a random method.
Step 1. We create an empty list then we add all pickup
nodes in random order.
Step 2. We create K empty dynamic lists, we divide
randomly the first list for K parts, and each part is af-
fected in one vehicle.
Step 3. we insert after each pickup node her delivery
node in each vehicle.
Step 4. We apply the corrector mechanism to correct
the route for each vehicle and have a feasible solution,
and we insert the origin and the destination depot at
first and at the end for each dynamic list. Finally, we
insert the AFS nodes consider the tank fuel capacity
remaining and we select the nearest AFS node. The
figure 3 presents the first three steps for generating the
initial solution. After creating the K dynamic lists and
applying the correct mechanism in each vehicle, we
found a solution we called it ”deactivated solution”.
Figure 3: The first steps for generating initial solution for
Green-SARP.
Finally, where we insert the depot and the AFS nodes
if necessary we find the complete solution named ”ac-
tivated solution”. The figure 4 illustrates the initial
solution after checking all the constraints.
Figure 4: The last step for generating initial solution for
Green-SARP.
2.2.2 Neighborhood
The neighborhood move begins with a feasible solu-
tion and progresses to the construction of new neigh-
boring solutions of this solution. At each iteration,
one of the four neighborhood moves is chosen ran-
domly. In fact, the choice of this neighborhood move
is justified by applying the intensification technique
to exploit the search space. Each neighborhood move
relaunches the search from a current solution to attain
an elite solution of the search space. These moves are
called: SWAP, Permutation, Insertion, and Reverse.
Each Neighborhood moves in the dynamic lists be-
fore inserting the AFS nodes and the origin and des-
tination depots, i.e these moves and operators are ap-
plied to the ”deactivated solution”. In the following,
we present these four moves.
(1) Permutation. The permutation move is per-
Simultaneous Simulated Annealing-Based Crossover Within a Multi-Agent Model for Solving the Green Share-a-Ride Problem
603

formed by randomly selecting two positions, say p1
and p2 (p1 ̸=p2) in the same dynamic list i.e in the
same vehicle, and then exchange the two nodes in the
two selected positions.
(2) SWAP. The SWAP move is performed by ran-
domly selecting many positions, in the same dynamic
list and then exchanging the nodes in the positions se-
lected.
(3) Reverse. Reversing the sequence of the elements
included among two randomly chosen positions p1
and p2 (p1 ̸=p2) in the same dynamic list.
(4) Insertion. in the first time selecting randomly two
positions from the same dynamic list symbolized by
p1 and p2 (p1 ̸=p2), and the node of the position p2
is inserted immediately before position p1.
2.2.3 Crossover Operator
The crossover operator is necessary for the entire pro-
cedure, enabling the creation of new offspring vehi-
cles by combining two parent vehicles in order to
reach new promising areas in the search space. To
apply this operator, first of all a selection operator
is used to randomly select two different parent ve-
hicles V1 and V2. On the other hand, by counting
the same length equals exactly to two pickup trav-
els the one point crossover is applied else it is the
two point crossover. On the other hand, by having
different length, two sub-methods are used, cutFis-
rtPart and cutRemainPart, to divide the long list of
the first parent vehicle into two parts based on the
length of the second parent vehicle. Then, the one
point crossover is applied if the length of the second
vehicle is equal exactly to two pickup travels else it
is the two point crossover. Finlay, the remaining el-
ements, obtained by the cutRemainPart method, are
distributed randomly between the two new offspring
vehicles.
One Point Crossover: a point on both selected ve-
hicles is fixed randomly, and designated a ’crossover
point’. The nodes to the Right of that point are per-
muted between the two vehicles, which results two
offspring. the first child gets the current value of the
first vehicle and the second child takes the value of
the second vehicle.
Two Point Crossover: two crossover points are gen-
erated randomly from the selected vehicles. The
pickup nodes between the two points are permuted
between these vehicles.
2.2.4 Simulated Annealing-based Crossover
The SA procedure starts by initializing the current
temperature T0 and generating a one random initial
solution X, and Sets the current best solution to de-
note Xbest, and the current best objective function
of X denotes Fbest = F(X). To improve the current
solution X, the corrector mechanism is performed to
obtain a feasible solution. In each iteration, a new
solution Y is generated from the exploitation of the
space of search using the neighborhood move based
on a random method or from the exploration of search
space using the Crossover operator. To select which
neighborhood move or crossover operator to use, the
algorithm first generated a randomly p value. After
that, the objective function values of X and Y are eval-
uated using the formula, ∆= F(Y)-F(X). Y is better
than X if ∆ is positive, in that case Y will replace X.
Otherwise, Y will replace X with a probability equal
to exp (∆/T). So the accepted solution Y is compared
to Xbest, if F(Y) is better than Fbest consequently re-
place Fbest with F(Y). The current temperature T0 is
decreased after Iter iterations according to the formula
T = α*T0. If one of the termination criteria is sat-
isfied, the algorithm will end. There is one termina-
tion condition in this algorithm: The final temperature
TF is attained TF =T, this stopping criteria consider
the condition of Non-improve: No improvement is
reached in succession temperature reductions. Figure
5 shows the flow chart of the proposed SAC heuristic.
3 EXPERIMENTAL STUDIES
To evaluate our model and demonstrate the benefits
of using multi-agent systems, we developed an en-
hanced Simulated Annealing called Improved Sim-
ulated Annealing-based Crossover (SAC), which is
based on an initial population of solutions. Both the
Improved Simulated Annealing (SA) and Simultane-
ous Simulated Annealing-based Crossover within a
Multi-Agent Mode (SAC-MA) were implemented in
Java on a PC with Intel processor core i7 vPro and 32
GB of RAM, using the Eclipse IDE to code these ap-
proaches and the Jade platform to create the SAC-MA
multi-agent system.
3.1 Test Instances
To evaluate and compare the efficiency of these ap-
proaches, numerical tests were conducted using the
data set generated by Masmoudi et al (Masmoudi
et al., 2019) from the literature on the green dial-a-
ride problem , and the parameters provided by Li et
al. for SARP (Li et al., 2014).
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
604
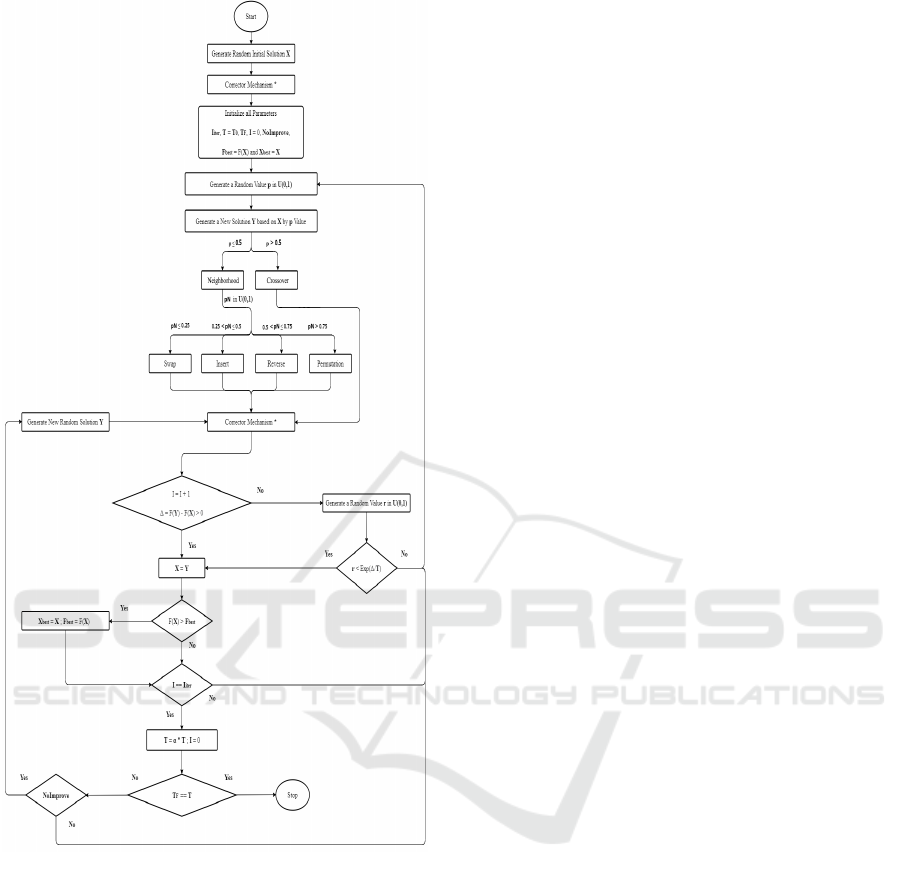
Figure 5: A flow chart of Simulated Annealing-based
Crossover.
3.2 Parameter Tuning
The SA metaheuristic uses five parameters: Iter, T0,
TF, Non-improving and α.
• Iter: indicates the number of iterations for the
search to be proceeded at a specific temperature,
• T0: indicates the initial temperature,
• TF: describes the final temperature when the SA
procedure stops,
• Non-improving: is the number of temperature re-
ductions during which the value of the objective
function is not improved,
• α: is the factor in charge of the cooling schedule
proposed by (Kirkpatrick et al., 1983).
Following an experimental study, the ‘popsize‘
parameter was set to 10 agents for small instances, 50
for medium instances (fewer than 40 requests), and
100 for large instances (more than 40 requests).
The Non-improving parameter was set to 100 for
small instances, 70 for medium instance, and 50 for
large instance. The other parameter values are defined
as follows:
• Iter = 1000,
• T0 = 12,
• TF = 0,001.
Therefore, we chose for the rest of the parameters the
best values used in the literature of SARP variants (Yu
et al., 2018), (Yu et al., 2021) α = 0.9.
3.3 Computational Results
To evaluate the performance of our SAC-MA ap-
proach, we established a rigorous comparative
methodology. Our results are compared to those ob-
tained by the SA algorithm developed by (Elkout
et al., 2023). Tables 2 present the comparison of SAC-
MA with the SA algorithm (Elkout et al., 2023) for
small and large instances. They display the optimal
value obtained by SA, followed by the best value, the
CPU time, and the average value obtained by SAC-
MA.
Figures 6 illustrate that SAC-MA performs bet-
ter and surpasses SA-CM in most cases for both
small and large instances.These best results can be
explained by the distributed search space in our pro-
posed approach SAC-MA, and the cooperative aspect
between the different agents.
Finally, figures 7 shows that SAC-MA is faster in
terms of CPU time compared to SA-CM. These ex-
cellent results confirm the efficiency of using a multi-
agent system, which primarily aims to reduce execu-
tion time through the cooperation and communication
between Simulated Annealing agents, as well as the
specific stopping condition employed in SAC-MA.
Indeed, the counter for iterations without improve-
ment (Non-improving) is not incremented solely
when an agent finds a locally non-improving solution.
The search for the dominant solution by an agent also
depends on global solutions. In other words, even
solutions found by other agents are considered non-
improving if one agent reaches them. This interaction
significantly reduces the required CPU time by opti-
mizing convergence towards a high-quality global so-
lution.
Simultaneous Simulated Annealing-Based Crossover Within a Multi-Agent Model for Solving the Green Share-a-Ride Problem
605
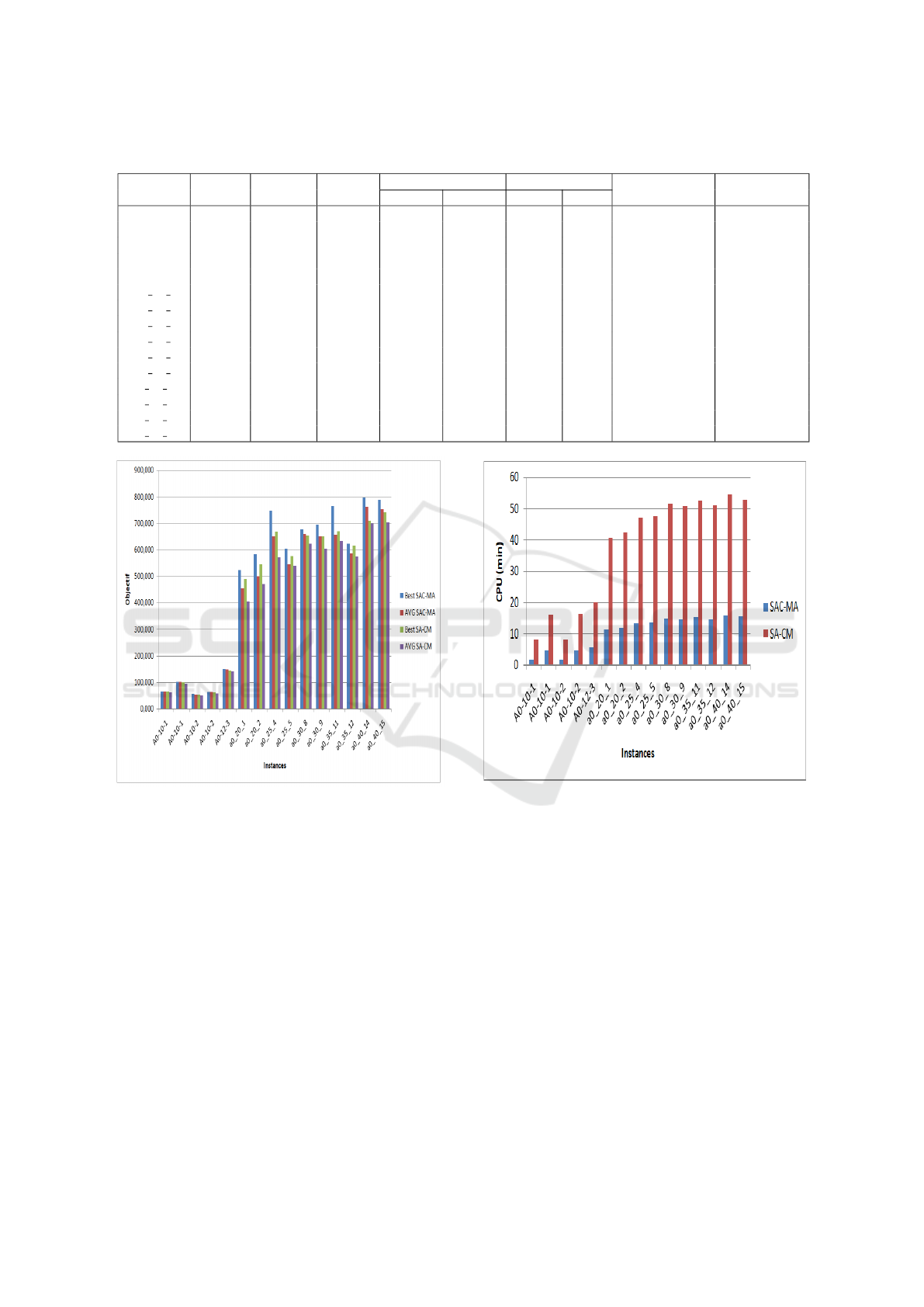
Table 2: Comparison of SAC-MA and SA-CM results for small instances.
Instance Nb-req Nb-AFS Nb-Veh SAC-MA SA-CM CPU SAC-MA CPU SA-CM
Best AVG Best AVG (minute) (minute)
A0-10-1 10 3 1 65,742 65,279 64,8 61,2 1,73 8,21
A0-10-1 10 3 2 102,410 102,090 98,7 94,4 4,46 16,08
A0-10-2 10 3 1 54,972 53,605 54 50,9 1,74 8,29
A0-10-2 10 3 2 64,043 63,648 62,1 58,1 4,48 16,35
A0-12-3 12 4 2 149,992 148,422 145 142 5,73 19,92
A0 20 1 20 6 4 523,238 453,204 490,07 406,3 11,23 40,79
A0 20 2 20 6 4 584,415 500,328 545,35 472,3 11,96 42,58
A0 25 4 25 8 5 750,295 652,113 668,33 572,8 13,34 47,32
A0 25 5 25 8 5 605,91 544,503 577,12 540,4 13,46 47,48
A0 30 8 30 9 6 679,382 660,314 653,75 623,8 14,92 51,86
A0 30 9 30 9 5 696,929 650,985 651,87 604,2 14,66 50,92
A0 35 11 35 11 5 765,68 658,534 670,56 635,4 15,33 52,69
A0 35 12 35 11 6 624,543 587,32 615,85 574,3 14,71 51,15
A0 40 14 40 12 7 798,553 764,772 710,52 699,9 15,85 54,21
A0 40 15 40 12 6 790,632 752,48 742,56 704,1 15,49 53,46
Figure 6: Comparison between SA-CM and the proposed
SAC-MA.
4 CONCLUSIONS
In this study, we introduce a Multi-Agent model
called simultaneous Simulated Annealing-based
Crossover within (SAC-MA) to solve th Green-
SARP. SAC-MA consist of two classes of agents:
the Master-Agent which is responsible of manag-
ing inputs and outputs of the system and a set of
Simulated-annealing Agents allowing to cooperate
and communicate between them to increase neigh-
borhood search efficiency and identify promising
areas and find the best solution. The experimental
results showed that SAC-MA produced the best set
of solutions compared to the Simulated Annealing
algorithm.
Figure 7: Comparison between SAC-MA and SA-CM in
terms of CPU time.
In future work, we plan to adapt our approach to
a multi-objective version of the Green-SARP, and
compare the results to other approaches from the
literature. Furthermore, the proposed SAC-MA algo-
rithm could be used also for future SARP extensions,
such as Green general SARP or Green multi-depot
SARP and Green-SARP with flexible compartments.
REFERENCES
Beirigo, B., Schulte, F., and Negenborn, R. (2018). Inte-
grating people and freight transportation using shared
autonomous vehicles with compartments. IFAC-Pap.,
51(9,):392–397.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
606

Cavagnini, R. and Morandi, V. (2021). Implementing hor-
izontal cooperation in public transport and parcel de-
liveries: The cooperative share-a-ride problem. Sus-
tainability 2021, 13(8).
Cordeau, J.-F. and Laporte:, G. (2007). The dial-a-ride
problem: Models and algorithms. Annals of Opera-
tions Research., 153(1,):29–46.
Davtyan, A. and Khchatryan, S. (2020). Simultaneous
multi-start simulated annealing for capacitated vehicle
routing problem. WSEAS TRANSACTIONS on COM-
PUTER RESEARCH, 8(4598).
Do, P.-T., Nguyen, N.-Q., and Pham, Q.-D. (2017). A time-
dependent model with speed windows for share-a-ride
problems: A case study for tokyo transportation. Data
and Knowledge Engineering, 114:67–85.
Elkout, E. and Belkahla, D. O. (2022). Modelling and solv-
ing the green share-a-ride problem. In In: Fujita, H.,
Fournier-Viger, P., Ali, M., Wang, Y. (eds) Advances
and Trends in Artificial Intelligence. Theory and Prac-
tices in Artificial Intelligence., IEA/AIE 2022, pages
648–658. Lecture Notes in Computer Science(), vol
13343. Springer, Cham.
Elkout, E., Nouri, H. E., and Belkahla, D. O. (2023). Simu-
lated annealing for the green share-a-ride problem. In
2023 IEEE International Conference on Artificial In-
telligence & Green Energy (ICAIGE), Sousse, Tunisia,
2023.
Ferber, J. (1999). Multi-agent systems: An introduction to
distributed artificial intelligence addison wesley long-
man, harlow. International Journal of Intelligence
Science., 5(4).
Kirkpatrick, S., Jr, G. C., and MP:, V. (1983). Optimizations
by simulated annealing. Science, 220(4598,):671–
680.
Li, B., Krushinsky, D., Reijers, H., and Woensel, T. (2014).
The share-a-ride problem: people and parcels shar-
ing taxis. European Journal of Operational Research,
238(1):31–40.
Masmoudi, M., Hosny, M., D., and E: (2019). An adap-
tive large neighborhood search heuristic for the green
dial-a-ride problem. ISTE Ltd and JohnWiley & Sons,
Inc. Solving Transport Problems: Towards Green Lo-
gistics.
Nguyen, N., Dung, N., Do, P., Le, K., Nguyen, M., and
Mukai, N. (2015). People and parcels sharing a taxi
for tokyo city. the 6th International Symposium on
Information and Communication Technology.
Yu, V., PAY, I., AANP, R., and S-W:, L. (2021). Simulated
annealing with mutation strategy for the share-a-ride
problem with flexible compartments. Mathematics,
9(18,).
Yu, V., Purwanti, S., PerwiraRedi, A., Chung-Cheng, L.,
Suprayogi, S., and Jewpanya, P. (2018). Simulated
annealing heuristic for the general share-a-ride prob-
lem. Eng. Optim, 50(7,):1178–1197.
Simultaneous Simulated Annealing-Based Crossover Within a Multi-Agent Model for Solving the Green Share-a-Ride Problem
607
