Enhancing 3D Human Pose Estimation: A Novel Post-Processing Method
Elham Iravani
1,2 a
, Frederik Hasecke
2 b
, Lukas Hahn
2 c
and Tobias Meisen
1 d
1
University of Wuppertal, Gaußstraße 20, Wuppertal, Germany
2
APTIV, Am Technologiepark 1, Wuppertal, Germany
{elham.iravani, meisen}@uni-wuppertal.de, {frederik.hasecke, lukas.hahn}@aptiv.com
Keywords:
Human Pose Estimation, Absolute Pose Estimation, Pose Refinement.
Abstract:
Human Pose Estimation (HPE) is a critical task in computer vision, involving the prediction of human body
joint coordinates from images or videos. Traditional 3D HPE methods often predict joint positions relative
to a central body part, such as the hip. Transformer-based models like PoseFormer (Zheng et al., 2021),
MHFormer (Li et al., 2022b), and PoseFormerV2 (Zhao et al., 2023) have advanced the field by capturing
spatial and temporal relationships to improve prediction accuracy. However, these models primarily output
relative joint positions, requiring additional steps for absolute pose estimation. In this work, we present a
novel post-processing technique that refines the output of other HPE methods from monocular images. By
leveraging projection and spatial constraints, our method enhances the accuracy of relative joint predictions
and seamlessly transitions them to absolute poses. Validated on the Human3.6M dataset (Ionescu et al., 2013),
our approach demonstrates significant improvements over existing methods, achieving state-of-the-art perfor-
mance in both relative and absolute 3D human pose estimation. Our method achieves a notable error reduction,
with a 33.9% improvement compared to PoseFormer and a 27.2% improvement compared to MHFormer esti-
mations.
1 INTRODUCTION
The accurate estimation of human poses from images
and videos is a foundational task across diverse ap-
plication domains, including human-computer inter-
action, augmented and virtual reality, and healthcare.
The principal objective of HPE is to accurately detect
and represent human joint positions. However, the
majority of HPE algorithms estimate joint positions
relative to a joint, which can lead to inconsistencies in
some applications. Moreover, these methods may re-
sult in skeleton structures with non-symmetrical limb
lengths and different body dimensions for the same
subject in different frames of a video. Such discrep-
ancies can significantly affect the accuracy and relia-
bility of subsequent applications that rely on precise
human pose data.
To address these limitations, we propose a novel
post-processing algorithm for refining estimated 3D
human joint poses from monocular images. The ob-
jective is to enhance the precision of a given joint pose
a
https://orcid.org/0000-0003-1961-2130
b
https://orcid.org/0000-0002-6724-5649
c
https://orcid.org/0000-0003-0290-0371
d
https://orcid.org/0000-0002-1969-559X
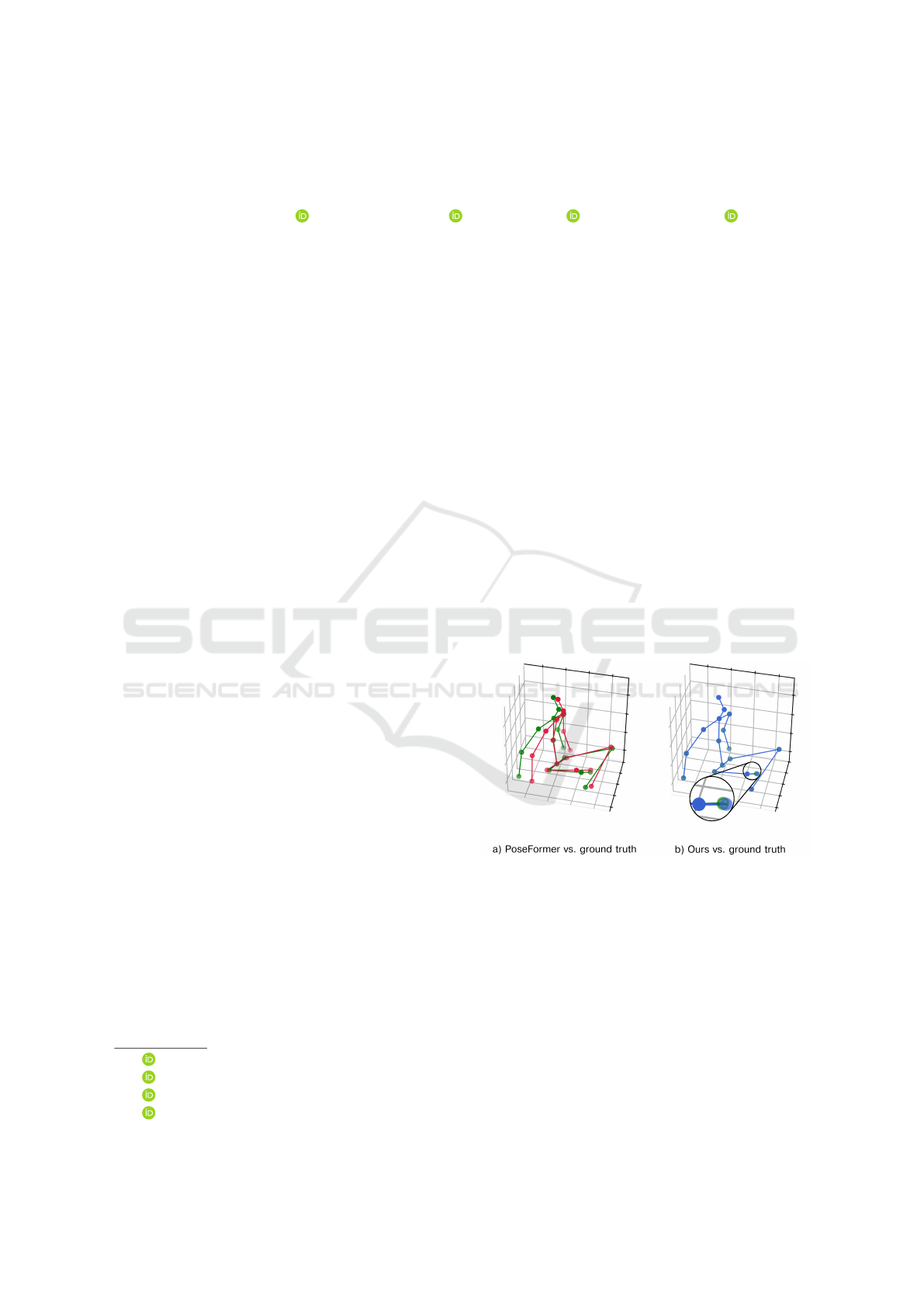
Figure 1: Example of refinement on a frame of the Hu-
man3.6M dataset, test subject S9, action SittingDown 1. a)
(Red): PoseFormer; (Green): ground truth. b) (Blue): Ours;
(Green): ground truth. (It should be noted that the ground
truth and the predicted pose are overlapping for the most
part after the refinement, hence why it’s hard to see a differ-
ence. Please note the right foot for the two colors, ground
truth (green) and prediction (blue) which shows a slight dif-
ference.)
estimation and to ensure a consistent skeletal structure
across the entire sequence by maintaining uniform
limb proportions. Our method leverages geometrical
concepts and 2D joint poses. Inputs to our algorithm
include estimated 3D human poses from an existing
HPE model, 2D pose data, and optional body dimen-
Iravani, E., Hasecke, F., Hahn, L. and Meisen, T.
Enhancing 3D Human Pose Estimation: A Novel Post-Processing Method.
DOI: 10.5220/0013316600003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
209-220
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
209

sions specifications, collectively supporting a refined,
robust output suitable for precision-critical applica-
tions.
Our algorithm refines estimated 3D joint poses in
camera coordinates, utilizing either prior body dimen-
sions or body dimensions estimated using 2D poses.
Summarizing our contributions:
• Body dimensions refinement: We introduce a
method that utilizes 2D joint poses and an esti-
mated ground plane to derive the subject body di-
mensions.
• Estimating absolute 3D poses from root relative
poses: Our proposed approach estimates absolute
joint poses by moving the skeleton along the root
joint’s projection ray, minimizing the 2D projec-
tion error for the entire skeleton. This enables ac-
curate prediction of 3D poses.
• Main contribution - refining 3D HPE: With the
skeleton model modified to include refined body
dimensions, enhancing the accuracy of 3D pose
estimations by adjusting along the projection rays
to match spatial constraints.
Recent advancements in human pose estima-
tion, notably through models like PoseFormer and
MHFormer, have driven substantial progress. Our
approach achieves considerable improvements over
these models. Using prior body dimensions, we
achieve a reduction in the average Mean Per Joint
Position Error (MPJPE) across all actions of the Hu-
man3.6M dataset by 33.9% compared to PoseFormer
and 27.2% compared to MHFormer estimations. Fur-
thermore, by refining 3D joint poses using estimated
body dimensions, our results show a 7.9% reduction
in the average MPJPE compared to PoseFormer and a
6.3% reduction compared to MHFormer. These re-
sults underscore the effectiveness of our approach,
marking a significant advance in the precision of hu-
man pose estimation. Figure 1 also shows an example
of how our method improves the 3D HPE.
The paper is structured as follows: In Section 2,
we review related work in human pose estimation, fo-
cusing on recent advancements in transformer-based
models and geometry-based methods. Section 3 de-
tails our proposed post-processing algorithm, includ-
ing body dimensions refinement, absolute pose es-
timation, and the overall 3D joint pose refinement
methodology. In Section 4, we present our experi-
mental setup and evaluation metrics, followed by a
comprehensive analysis of the results, highlighting
the performance improvements over existing models.
Section 5 discusses the implications of our findings
and examines the limitations of our approach. Finally,
Section 6 concludes the paper and suggests potential
directions for future research in refining 3D human
pose estimation.
2 RELATED WORKS
Human Pose Estimation (HPE) has achieved signif-
icant progress in recent years, largely driven by ad-
vances in deep learning. Traditional motion capture
systems can generate 3D pose annotations in con-
trolled laboratory settings, but their effectiveness di-
minishes in natural, uncontrolled environments. One
major challenge in the context of monocular RGB im-
ages and videos is resolving depth ambiguities. This
challenge arises because the conversion of 3D infor-
mation into 2D projections inherently loses one di-
mension, making it an ill-posed inverse problem. As
noted by (Zheng et al., 2023) in their comprehen-
sive survey, the majority of research in 3D HPE from
monocular images or videos has struggled with these
depth ambiguities.
In contrast, multi-view approaches encounter
challenges in accurately associating multiple view-
points. Some studies have sought to overcome these
limitations by incorporating additional sensors, such
as depth sensors, inertial measurement units (IMUs),
and radio frequency devices. (Yu et al., 2018; Kad-
khodamohammadi et al., 2017; Zhi et al., 2020) How-
ever, these approaches often constrained by cost and
the requirement for specialized hardware.
Additionally, deep learning models in this field
tend to rely heavily on large, diverse datasets and are
sensitive to the conditions of the data collection en-
vironment. These constraints highlight the ongoing
need for more robust, adaptable methods in 3D HPE
research (Zheng et al., 2023). The advent of deep
learning revolutionized HPE, especially through the
application of convolutional neural networks (CNNs).
In 2D HPE, a seminal work by Toshev and
Szegedy, introducing DeepPose (Toshev and Szegedy,
2014) utilizes a cascade of CNNs to predict human
poses. This approach marked a significant leap in
accuracy by leveraging the hierarchical structure of
CNNs to learn feature representations at multiple
scales. Subsequently, several state-of-the-art meth-
ods have been developed, establishing new bench-
marks in monocular 2D HPE. OpenPose (Cao et al.,
2017) introduced Part Affinity Fields (PAFs), which
encode the location and orientation of limbs, thereby
enabling real-time multi-person pose estimation. The
High-Resolution Network (HRNet) (Sun et al., 2019)
maintains high-resolution representations throughout
the network, significantly enhancing pose estimation
accuracy by integrating high-resolution feature maps
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
210

with multi-scale information. The Cascaded Pyramid
Network (CPN) (Chen et al., 2018), addresses chal-
lenges such as occluded and invisible keypoints by
employing a two-stage process: GlobalNet for coarse
prediction and RefineNet for refining hard keypoints.
Similarly, the architecture of CNNs also facilitate
3D Human Pose Estimation (HPE). PoseNet (Mar-
tinez et al., 2017) employed a straightforward yet
effective approach using a fully connected network
on detected poses, demonstrating competitive perfor-
mance and underscoring the importance of efficient
architectural design. In addition to traditional con-
volutional networks, transformer architectures (Has-
sanin et al., 2022; Li et al., 2022a; Zhang et al.,
2022; Zheng et al., 2021; Li et al., 2022b; Zhao et al.,
2023) have been employed to model spatio-temporal
correlations in 3D human pose estimation. Pose-
Former (Zheng et al., 2021), introduced by Zheng et
al., employs a spatial-temporal transformer to model
human joint relationships within frames and tempo-
ral correlations across frames. Building upon this,
(Li et al., 2022b) proposed MHFormer, a Multi-
Hypothesis Transformer that generates multiple plau-
sible pose hypotheses to address depth ambiguity and
self-occlusion.
(Li et al., 2023) introduces the Pose-Oriented
Transformer (POT), which incorporates a pose-
oriented self-attention mechanism and distance-
related position embeddings to explicitly model the
interactions between body joints based on their hi-
erarchical structure. Furthermore, they present an
Uncertainty-Guided Refinement Network (UGRN),
which refines initial 3D pose predictions by consid-
ering the estimated uncertainty of each joint, employ-
ing an uncertainty-guided sampling strategy and self-
attention mechanism.
Geometry-based methods have also been instru-
mental in advancing HPE from monocular cameras,
as they apply geometric constraints and leverage 3D
information to improve pose estimation accuracy. In-
tegral Pose Regression (Sun et al., 2018) introduced
a method that directly regresses joint coordinates in
3D space by leveraging geometric constraints within
a deep learning framework, unifying 2D heatmaps
and 3D joint locations into a single representation.
Geometry-Aware Methods (Kocabas et al., 2020) de-
veloped a model that leverages 3D human body mod-
els and optimizing pose estimation by aligning 2D
poses with 3D model projections, thereby preserv-
ing the geometric consistency of the predicted poses.
Additionally, Weakly-Supervised Learning (Rhodin
et al., 2018) introduced a weakly-supervised approach
that applies geometric constraints from synchronized
multi-view images, enhancing 3D pose prediction
even with limited labeled data.
While deep learning methods have demonstrated
remarkable capabilities in various domains, we ob-
serve a significant gap in incorporating physical con-
straints to ensure realistic and consistent outcomes.
This limitation has also been noted by (Zheng et al.,
2021) and (Li et al., 2022b), particularly in the con-
text of addressing challenges like complex poses and
occlusions. Therefore, in this work, we aim not to
further enhance the already well-established strengths
of deep learning Transformer methods but rather to
tackle their apparent weaknesses in handling these
challenges. Geometric methods, which leverage spa-
tial relationships between 2D joint locations to infer
3D poses, offer a complementary perspective that can
help address these limitations. By integrating such
approaches, we aim to achieve a more robust frame-
work capable of addressing the inherent complexities
of real-world scenarios.
3 METHOD
The primary objective of our method is to improve the
accuracy of estimated 3D human joint poses through
a post-processing approach that leverages geometric
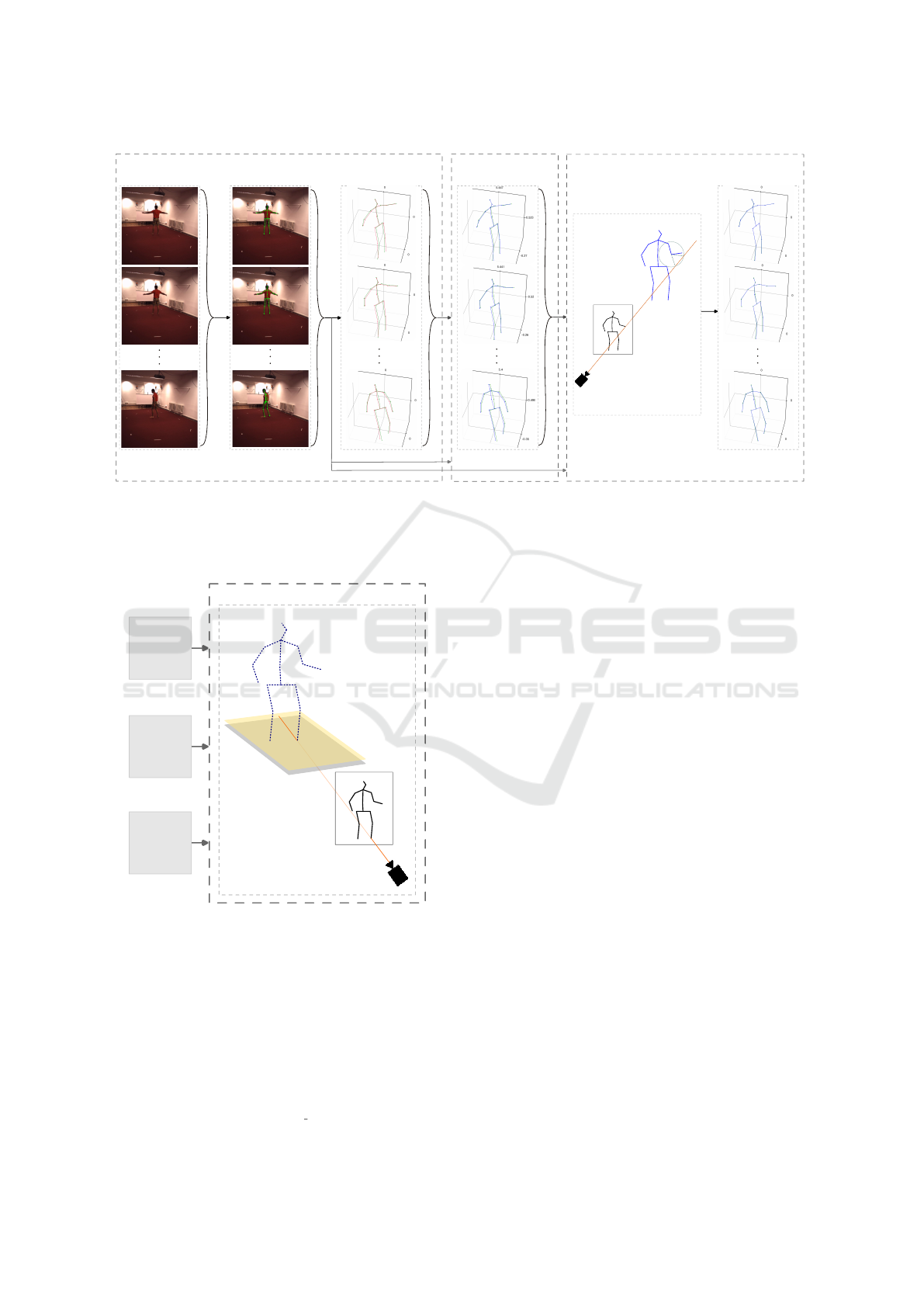
principles and 2D pose estimation. As shown in Fig-
ure 2, this process incorporates estimated 3D HPE
(from existing algorithms), 2D HPE, and optional
body dimensions. For effective refinement of 3D
pose estimation, the algorithm requires 3D joint po-
sitions in camera coordinates. Additionally, it can in-
corporate either prior body dimensions, derived from
subject-specific knowledge, or estimated body dimen-
sions, approximated using 2D HPE. Our approach
comprises three main phases: body dimensions re-
finement, absolute pose estimation, and 3D joint pose
refinement, each of which is discussed in detail in the
following subsections.
3.1 Body Dimensions Refinement
For improved absolute pose estimation using 2D joint
poses and enhanced joint pose refinement, it is advan-
tageous to obtain accurate body dimensions, enabling
more precise adjustments. The input requires esti-
mated 3D poses that provide initial body dimension
estimates. However, as noted earlier, these body di-
mensions - when generated by current HPE methods
- are frequently inaccurate and can vary across frames
for a same subject. Additionally, they often result in
asymmetrical limb lengths within the skeletal struc-
ture.
Enhancing 3D Human Pose Estimation: A Novel Post-Processing Method
211
a) Inputs
.
.
.
.
.
.
.
.
.
Image Sequence
2D Pose Estimation
HPE, relative
b) Absolute Pose
Estimation
c) 3D Joint Pose Refinement
.
.
.
.
.
.
Joints refinement
(e.g. right wrist refinement)
H1
H2
Figure 2: a) Images and 2D joint poses which are used by a 3D HPE method to provide 3D hip relative joint poses for our
method. b) In post-processing phase, it estimates joints poses in camera coordinates by utilizing 2D joint poses. c) By having
the joint poses in camera coordinate and 2D joint poses, our method will refine the joint poses. (Green): Ground truth; (Red):
PoseFormer HPE; (Blue): Our method results. (Where the hip is in (0, 0, 0), it means the result shows in hip-relative).
Limb Length Refinemet
Estimated
Ground
Plane
Estimated
3D HPE,
Relative
2D Joint
Poses
Figure 3: Body dimensions refinement uses 2D joint poses
and estimated 3D HPE and ground plane. Camera ray, in
this image for the right foot, intersected with a plane (yel-
low), which is passing through the right foot 3D position
and parallel to the ground plane (gray), starts the body di-
mensions refinement procedure.
In 3D HPE input, the initial 3D poses are provided
in hip-relative coordinates. In the world coordinate
system, the ground plane is defined by z = 0. This
plane is then transformed into the camera coordinate
system, denoted as plane
ground camera
. For each joint i
(specifically the Foot joints in this context), the undis-
torted 2D position on the image plane is represented
by p
2D
i
= (u
i
,v
i
). The corresponding ray in the cam-
era coordinate system can be expressed as:
r
i
:
z
i
> 0,
x
i
= (u
i
− c
x
)z
i
/ f
x
,
y
i
= (v
i
− c
y
)z
i
/ f
y
(1)
where c
x
,c
y
, f
x
, f
y
are the camera parameters. In
order to determine 3D position of the Foot joint, as
illustrated in Figure 3, the ray r
i
is intersected with
a plane plane
Foot
, which is parallel to the ground
plane in the camera coordinate system. Assuming
plane
Foot
(the yellow plane shown in Figure 3) is po-
sitioned at a height z = h in the transformed cam-
era coordinates, where h represents an approximation
of the Foot joint distance from the ground plane (the
gray plane shown in Figure 3), the intersection point
p
Foot
= (x
Foot
,y
Foot
,z
Foot
) can be determined by solv-
ing the following equation:
plane
Foot
: Ax
i
+ By
i
+Cz
i
= 0;
where
x
i
= (u
i
− c
x
)z
i
/ f
x
,
y
i
= (v
i
− c
y
)z
i
/ f
y
(2)
Here, the coefficients of A, B,C are defined from the
plane
Foot
. Subsequently, the entire set of body joint
poses from the initial frame is transformed into the
camera coordinate system, resulting in new positions
P
camera
= {p
camera
i
| i = 1, .. ., N}. Each joint p
camera
i
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
212

is then further refined by aligning it along its projec-
tion ray (r
i
) and following the vector direction from
its initial parent joint. The line for each joint is de-
fined by the vector vec
i
, which extends from the initial
parent joint p
camera
parent(i)
to the initial child joint p
camera
child(i)
.
The adjusted joint position is found by knowing that
the adjusted child joint p
ad justed
child(i)
lies along vector vec
i
direction from the adjusted parent joint p
ad justed
parent(i)
. The
intersection of this line with r
i
ensures the joint posi-
tion aligns accurately with 2D projection constraints:
L
i
(t) = p
ad justed
parent(i)
+tvec
i
(3)
The intersection point p
ad justed
child(i)
is then calculated:
where
x
i
= (u
i
− c
x
)z
i
/ f
x
,
y
i
= (v
i
− c
y
)z
i
/ f
y
(4)
where t is determined by solving for the intersection
of the line L
i
(t) with the projected ray r
i
.
3.2 Absolute Pose Estimation
Estimating 3D HPE in camera coordinates is benefi-
cial for accurately capturing spatial relationships and
scale, thereby providing a reliable foundation for re-
fining finer details through 2D HPE projections. To
improve the accuracy of absolute pose estimation us-
ing 2D poses, our method leverages body dimensions.
Their accuracy directly impacts the quality of the ab-
solute pose estimation. This approach involves two
preliminary steps: refining the body dimensions and
adjusting the skeleton in the camera coordinate sys-
tem. First, refined body dimensions are calculated
following the methodology described in Section 3.1.
These refined lengths are then used to adjust the di-
mensions of the skeleton in the relative pose, modify-
ing each limb segment and thereby updating the 3D
joint positions accordingly. The absolute pose is esti-
mated by translating the entire skeleton along the hip
joint’s projection ray to minimize the 2D projection
error. The objective is thus to minimize discrepancies
between the projected 2D joint poses and the observed
2D joint positions.
Utilizing the transformation matrix from the pre-
vious frame can help improve the accuracy of pre-
dictions in camera coordinates. Additionally, inaccu-
rate estimations from the input data may sometimes
lead to premature convergence, resulting in a less pre-
cise pose estimation. To address this, when process-
ing video input for 3D HPE refinement, the previous
frame is also used for absolute pose estimation to en-
hance continuity and accuracy.
3.3 3D Joint Pose Refinement
As it illustrates in part c of Figure 2, our approach
uses undistorted 2D poses to refine the joint poses by
aligning them more closely with 2D projection rays
in camera coordinates. Most current models that pre-
dict 3D poses estimate them in relative joint poses,
which can, as stated, result in asymmetrical skele-
tons and inconsistent body dimensions across frames.
Thus, our initial step is to estimate body dimensions
or use predefined body dimensions as input. This en-
ables a more accurate absolute pose estimation, set-
ting a strong foundation for the subsequent refinement
phase.
Following the adjustment of 3D poses using new
body dimensions, absolute poses are estimated as de-
scribed in Section 3.2. This results in a set of 3D
joint poses in camera coordinates, which are further
refined by applying the updated body dimensions. To
continue the refinement, 2D poses are retrieved from
undistorted images. The refinement process begins at
the hip joint, which serves as the base point. Let P
hip
represent the 3D coordinates of the hip joint, and as-
sume w.l.o.g that J
i
is the next joint (e.g., spine) to be
refined. Given the link length L
hip-to-spine
between the
hip and spine, we can establish a 3D ray, r
spine
, from
the camera through the undistorted 2D position of the
spine in the image. This ray can be parameterized the
same way as in Equation 1.
The 3D ray r
spine
represents an infinite line in
3D space, where all points on this ray project to the
same 2D position as the spine’s 2D pose in the im-
age. The potential 3D positions for the spine joint
are the points on the aforementioned ray that are pre-
cisely L
hip-to-spine
units away from the hip joint, yield-
ing at most two possible positions, (J
(1)
spine
,J
(2)
spine
). This
requires finding the intersection between the sphere
centered at P
hip
with radius of L
hip-to-spine
and the ray
r
spine
. In part c of Figure 2, an example is shown il-
lustrating two possible hypotheses for the right wrist
refinement. In order to determine the correct position,
we select the one closer to the initial estimate of J
spine
by comparing Euclidean distances:
J
refined
spine
= arg min
J
(1)
spine
,J
(2)
spine
∥J
(i)
spine
− J
spine
∥ (5)
This refinement process is applied iteratively to each
joint, beginning at the hip and proceeding sequen-
tially through the remaining joints (e.g., spine, shoul-
ders, knees). For each joint J
i
, given a body dimen-
sion L
parent-to-child
and a projection ray r
i
, the position
is refined using the same method as described above.
By applying this method, even a single frame can
be refined effectively. However, utilizing frame se-
Enhancing 3D Human Pose Estimation: A Novel Post-Processing Method
213

Table 1: Comparison of the estimated body dimensions er-
ror and PoseFormer average body dimensions error (mm)
on the Human3.6M dataset, test subject S9.(Average limb
length error of all four recorded viewpoints of the same se-
quence used independently) (Bold: Improved).
Link GT to avg PoseFormer GT to refined
Thorax Neck 0.75 2.42
Neck Head 2.90 2.41
Thorax R Shoulder 16.78 4.66
R Shoulder R Elbow 8.87 5.11
R Elbow R Wrist 2.49 2.99
Thorax L Shoulder 17.50 4.66
L Shoulder L Elbow 8.76 5.11
L Elbow L Wrist 2.64 2.99
Hip R Hip 13.38 5.75
R Hip R Knee 18.59 1.55
R Knee R Foot 22.75 7.54
Hip L Hip 13.42 5.75
L Hip L Knee 18.18 1.55
L Knee L Foot 23.96 7.54
Hip Spine 4.15 2.64
Spine Thorax 1.68 2.14
Average 11.05 4.05
quences we noticed an enhancement in temporal con-
sistency and reduce potential ambiguities.
4 RESULTS
For the evaluation, we used PoseFormer (Zheng et al.,
2021) and MHFormer (Li et al., 2022b) as 3D pose
estimation model on the Human3.6M (Ionescu et al.,
2013) dataset to provide the input. The Human3.6M
dataset, designed for 3D HPE and activity recogni-
tion, includes 3.6 million annotated 3D human poses
captured from videos of 11 actors performing 17 ac-
tivities from multiple camera angles. Each frame is
precisely annotated with a marker-based motion cap-
ture system, providing accurate 3D joint coordinates.
Following prior works (Zheng et al., 2021; Li et al.,
2022b), we evaluated our method using both test sets
of S9 and S11. It is important to note that 3D poses es-
timated by PoseFormer and MHFormer are provided
in hip-relative coordinates. In order to utilize the
projection rays and refine the estimation, it is neces-
sary to estimate the absolute poses in camera coordi-
nates. The PoseFormer estimates were generated us-
ing a model trained on ground truth 2D poses with 81
frames, whereas MHFormer estimates were produced
using a model trained on predicted 2D poses with 351
frames.
4.1 Body Dimensions Refinement
As discussed in Section 3, it is beneficial to refine the
body dimensions from 3D joint poses input. The esti-
mated 3D joint poses from PoseFormer shows that the
body dimensions have some issues. Some of these is-
sues could be resolved with relatively straightforward
modifications. For instance, the mirrored limbs ex-
hibit disparate sizes which could be modified easily.
Moreover, sizes fluctuate over time for a single sub-
ject. Table 1 shows how body dimensions were re-
fined by utilizing 2D joint poses for test set S9 using
the method described in Section 3.1. The second col-
umn shows the error between the Ground Truth (GT)
body dimensions and the average body dimensions
over frames estimated by PoseFormer. The third col-
umn shows the error between the ground truth body
dimensions and the estimated body dimensions. No-
tably, the lower body, which showed the largest in-
accuracies in PoseFormer estimates, benefited most
from the refinement process. Overall, the body di-
mensions error was reduced by 63.3%.
4.2 3D Human Pose Refinement
4.2.1 Quantitative Results
To evaluate the refinement results, we report the Mean
Per Joint Position Error (MPJPE) evaluation metric
in millimeter for joint poses in hip relative. MPJPE
quantifies the average distance between correspond-
ing joints in predicted and ground truth poses, provid-
ing a measure of pose estimation accuracy. This met-
ric is used to assess the performance of human pose
estimation methods.
Table 2 presents the results of all 15 action se-
quences in the test sets S9 and S11. Both the estima-
tion and refinement processes utilize 2D ground truth
poses. To facilitate the adjustment of poses, the body
dimensions were provided in two different ways: We
show both the results using the prior body dimensions
of the test subjects, referred to as Ours2, and using es-
timated body dimensions, referred to as Ours1. When
no prior knowledge about the subject is given, our
method estimates the body dimensions using the ap-
proach described in Section 3.1. The results show that
the enhancement of body dimensions leads to more
precise refinements, resulting in improved accuracy.
As previously stated in Section 3, absolute pose
estimation is also calculated by using 2D joint poses.
This process involves moving the estimated 3D body
skeleton on the hip projection ray in order to minimize
overall 2D projection errors.
Table 2 demonstrates the effectiveness of this
method in improving pose estimation accuracy. If the
absolute poses become more precise, they can further
enhance the final refinement process. The last col-
umn presents the average of MPJPE across all actions.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
214

Table 2: Quantitative comparison of 3D human pose estimation on the Human3.6M dataset; MPJPE (mm) values of each
action using ground truth 2D poses. (”PoseFormer + Ours”: Our method used PoseFormer estimation as input to do the
post-processing; ”MHFormer + Ours”: Our method used MHFormer estimation as input to do the post-processing.) - (1:
Post-Processing using estimated body dimensions; 2: Post-Processing using prior body dimensions) - (Bold: The first best;
Underline: The second best).
Dir. Dis. Eat. Greet. Phone Photo Pose Purch. Sit. Sit.D. Smoke Wait. Walk.D. Walk. Walk.T. Avg
(Li et al., 2023) 32.9 38.3 28.3 33.8 34.9 38.7 37.2 30.7 34.5 39.7 33.9 34.7 34.3 26.1 28.9 33.8
MHFormer (f = 351) 34.8 39.8 34.4 37.0 38.2 44.3 38.7 36.2 45.2 48.3 38.6 38.6 38.3 27.4 27.5 38.3
MHFormer + Ours
1
31.3 37.0 33.9 35.1 35.9 40.4 37.8 32.3 41.3 41.3 35.8 37.6 35.0 29.0 27.8 35.9
MHFormer + Ours
2
23.9 29.7 27.7 26.7 26.6 32.8 29.5 24.4 34.6 34.9 28.3 29.5 27.5 18.0 17.4 27.9
PoseFormer (f = 81) 29.9 33.5 29.9 31.0 30.2 33.2 34.7 31.3 37.8 38.6 31.6 31.5 28.9 23.3 23.1 31.6
PoseFormer + Ours
1
26.4 29.8 28.8 29.6 28.5 29.5 34.0 26.2 33.8 33.3 29.4 29.5 25.5 23.9 23.1 29.1
PoseFormer + Ours
2
17.7 21.1 22.2 21.0 20.3 22.5 24.1 17.2 27.2 27.5 21.5 21.4 18.0 13.4 12.6 20.9
Table 3: Quantitative comparison of 3D human pose estimation on the Human3.6M dataset; MPJPE (mm) values of each
joint using ground truth 2D pose. (”PoseFormer + Ours”: Our method used PoseFormer estimation as input to do the post-
processing) - (1: Post-Processing using estimated body dimensions; 2: Post-Processing using prior body dimensions) - (Bold:
The first best; Underline: The second best).
Head Neck R Shoulder R Elbow R Wrist L Shoulder L Elbow L Wrist R Hip R Knee R Foot L Hip L Knee L Foot Spine Thorax
PoseFormer (f = 81) 34.2 29.3 32.9 42.9 50.5 29.7 37.4 47.7 17.0 24.9 48.4 17.0 29.4 52.5 18.9 23.9
PoseFormer + Ours
1
32.0 28.4 30.4 42.7 48.7 28.2 37.0 45.9 13.1 19.8 43.5 13.3 19.9 44.7 19.4 27.3
PoseFormer + Ours
2
25.8 19.9 21.7 32.5 40.0 21.4 29.7 38.5 3.2 13.7 30.0 3.2 14.0 29.6 13.9 18.9
Ours2, which show the estimations using prior body
dimensions, reveal a reduction in the average MPJPE
across all actions by 33.9% compared to PoseFormer
and by 27.2% compared to MHFormer, with even
larger improvements for certain individual actions.
The other columns confirm improvements across all
actions.
Ours1, refinement of 3D joint poses using es-
timated body dimensions, achieving a 7.9% reduc-
tion in the average MPJPE relative to PoseFormer
and a 6.3% reduction compared to MHFormer. The
other columns indicate improvements for all actions,
except for the ”Walking” and ”WalkingTogether”
actions. Furthermore, our post-processing method
demonstrates a markedly superior outcome compared
to (Li et al., 2023), in which a refinement method for
3D HPE was also employed. Moreover, Figures 6
and 7 present a detailed frame-wise MPJPE compari-
son, highlighting the effectiveness of Our1 and Our2
across 400 frames.
In Table 3, a joint-by-joint quantitative compari-
son is presented. Our2 shows the reduction in MPJPE
achieved by our method for all joints, with a partic-
ularly notable improvement observed for the lower
body, particularly for ”R Hip” and ”L Hip”, when
using prior body dimensions. In Our1, a reduction
in MPJPE is achieved for all joints except the Spine
and Thorax when our method employed the estimated
body dimensions as described in Section 3.1. This
may occur because this is a non-rigid link, and their
positions are influenced by the overall body posture
rather than being directly related to link lengths. Con-
sequently, variations in these regions are less sensitive
to adjustments in estimated body dimensions, leading
to a smaller impact on MPJPE. For additional joint-
based comparisons across selected actions, please re-
fer to Figures 8 to 12 in the appendix. The presented
figures illustrate the extent to which each joint has
been individually refined through post-processing.
4.2.2 Qualitative Results
To highlight the effectiveness of our approach, we
present a visual comparison between the predicted 3D
poses and the ground truth. As illustrated in Figure 4,
our method demonstrates improved accuracy com-
pared to PoseFormer, particularly in challenging sce-
narios. We evaluate our method with both using es-
timated body dimensions and prior body dimensions
on the Human3.6M, test subject S9, actions ”Walk-
Dog”, ”Discussion”, ”Directions”, ”Smoking” and
”Sitting”. The results clearly show that our predic-
tions align more closely with the ground truth, show-
casing the robustness and precision of our approach.
5 DISCUSSION
The proposed post-processing method effectively re-
fines joint poses, ensuring accurate limb proportions
in human pose estimation. Improved skeleton scaling
directly contributes to more precise joint pose refine-
ments.
Enhancing 3D Human Pose Estimation: A Novel Post-Processing Method
215
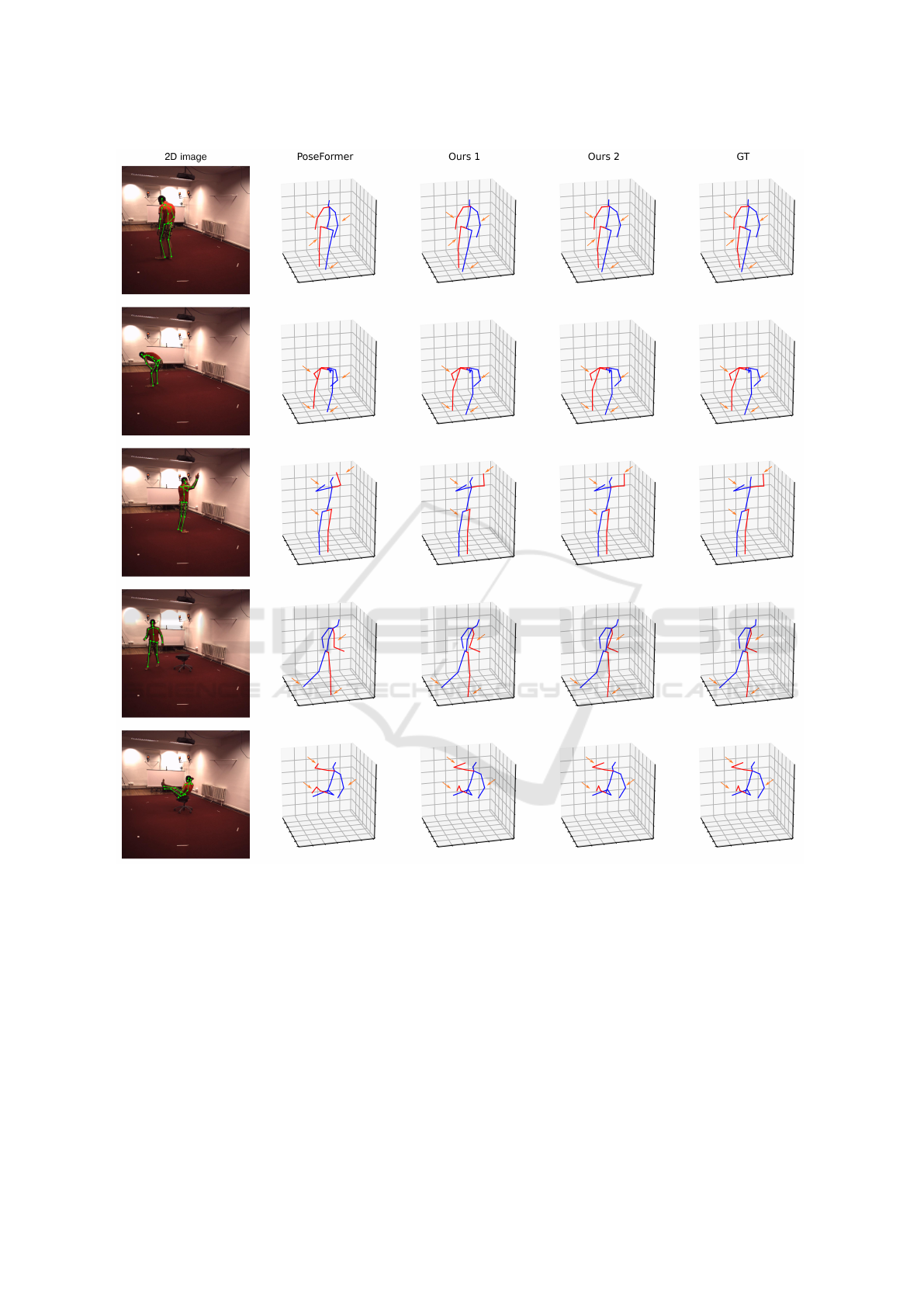
Figure 4: Qualitative comparison of 3D human pose estimation results between our proposed method and the PoseFormer
baseline on the Human3.6M dataset, test subject S9, action WalkDog, Discussion, Directions, Smoking and Sitting.; (”Ours 1”:
Our method used PoseFormer estimation as input to do the post-processing using estimated body dimensions; ”Ours 2”: Our
method used PoseFormer estimation as input to do the post-processing using prior body dimensions.); Locations with huge
improvements are highlighted with an orange arrow. (Blue): Left; (Red): Right.
As presented in Section 4, our refinement method
delivers strong results using both prior body dimen-
sions and estimated body dimensions based on 2D
poses. Improvements were consistently observed,
with some actions showing significant refinements.
Models capable of predicting 2D joint poses, such
as CPN (Chen et al., 2018), often fail to pro-
duce smooth, accurate 2D predictions over sequential
frames, which can lead to large deviations from the
actual joint positions. To examine the impact of 2D
prediction accuracy on 3D HPE refinement, we com-
pared results using CPN-derived 2D joint poses with
those obtained using ground truth 2D poses. We ob-
served that the average MPJPE across all actions and
test sets for our method was 49.47 mm when using
CPN poses, compared to 44.79 mm with PoseFormer,
illustrating the critical role of accurate 2D predictions
in 3D pose estimation. Figure 5 illustrates how 2D
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
216
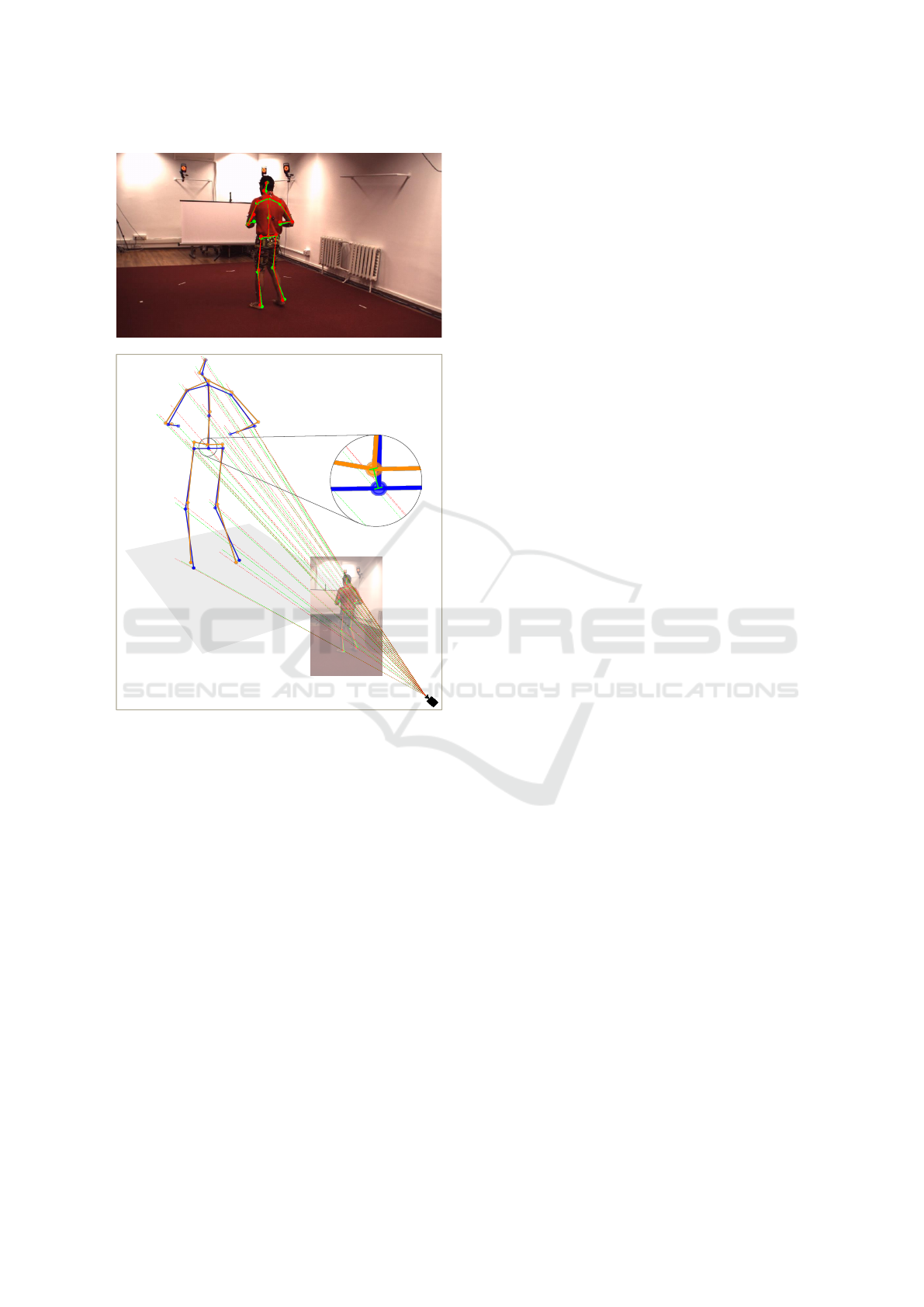
a) RGB image + 2D joint poses
b) Projection rays from camera through virtual image and 3D HPE
94.2 mm
Figure 5: The effect of 2D pose estimation on absolute 3D
HPE. a) One frame of test set S9, action Directions of the
Human3.6M dataset. (Green): Ground truth 2D joint poses;
(Red): CPN 2D joint pose estimation. b) Green rays from
the camera are related to each joints form ground truth and
the red rays are related to CPN result. (Blue): The result
of our method when it used ground truth 2D joint poses;
(Orange): The result of our method when it used CPN 2D
joint poses.
pose estimation accuracy affects absolute 3D HPE.
In this example, the absolute hip joint estimated us-
ing CPN 2D joint pose estimation differs 94.2 mm
from the one estimated using ground truth 2D poses.
The accuracy of 2D HPE also affects the correct pre-
diction of occluded joints. Therefore, if an occluded
joint is misestimated in 2D HPE, the probability that
our method identifies it as occluded in 3D HPE would
be low.
A review of both absolute and relative poses re-
finement reveals numerous cases where MPJPE for
both absolute and relative poses are approximately
1 mm, when our post-processing method is applied,
demonstrating the method’s ability to perform highly
precise refinements, especially when the absolute
pose estimation is accurate. Figure 1 shows an ex-
ample frame of SittingDown action, test set S9, on
Human3.6M dataset, where the MPJPE was reduced
from 41.31 mm to 1.15 mm in camera coordinates,
and the relative pose error was reduced to 0.90 mm.
This example underscores the significant enhance-
ments achievable with our post-processing approach.
6 CONCLUSION
In this paper, we propose a novel post-processing
technique that focuses primarily on refining joint
poses output of human pose estimation models from
a monocular camera to address critical limitations
found in existing methods. By estimating absolute
poses and ensuring consistent limb proportions, our
approach improves the accuracy and reliability of
skeleton representations. This improvement is es-
sential for applications that rely on precise human
poses in camera coordinates. Our method demon-
strates competitive performance, outperforming state-
of-the-art techniques on the Human3.6M dataset, un-
derscoring its effectiveness in advancing 3D human
pose estimation.
REFERENCES
Cao, Z., Simon, T., Wei, S.-E., and Sheikh, Y. (2017). Real-
time multi-person 2d pose estimation using part affin-
ity fields. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 7291–
7299.
Chen, Y., Wang, Z., Peng, Y., Zhang, Z., Yu, G., and Sun, J.
(2018). Cascaded pyramid network for multi-person
pose estimation.
Hassanin, M., Khamiss, A., Bennamoun, M., Boussaid, F.,
and Radwan, I. (2022). Crossformer: Cross spatio-
temporal transformer for 3d human pose estimation.
arXiv preprint arXiv:2203.13387.
Ionescu, C., Papava, D., Olaru, V., and Sminchisescu, C.
(2013). Human3. 6m: Large scale datasets and pre-
dictive methods for 3d human sensing in natural envi-
ronments. IEEE transactions on pattern analysis and
machine intelligence, 36(7):1325–1339.
Kadkhodamohammadi, A., Gangi, A., de Mathelin, M., and
Padoy, N. (2017). A multi-view rgb-d approach for
human pose estimation in operating rooms. In 2017
IEEE winter conference on applications of computer
vision (WACV), pages 363–372. IEEE.
Kocabas, M., Athanasiou, N., and Black, M. J. (2020).
Vibe: Video inference for human body pose and shape
estimation.
Enhancing 3D Human Pose Estimation: A Novel Post-Processing Method
217

Li, H., Shi, B., Dai, W., Zheng, H., Wang, B., Sun, Y.,
Guo, M., Li, C., Zou, J., and Xiong, H. (2023). Pose-
oriented transformer with uncertainty-guided refine-
ment for 2d-to-3d human pose estimation. In Proceed-
ings of the AAAI Conference on Artificial Intelligence,
volume 37, pages 1296–1304.
Li, W., Liu, H., Ding, R., Liu, M., Wang, P., and Yang,
W. (2022a). Exploiting temporal contexts with strided
transformer for 3d human pose estimation. IEEE
Transactions on Multimedia, 25:1282–1293.
Li, W., Liu, H., Tang, H., Wang, P., and Gool, L. V. (2022b).
Mhformer: Multi-hypothesis transformer for 3d hu-
man pose estimation.
Martinez, J., Hossain, R., Romero, J., and Little, J. J.
(2017). A simple yet effective baseline for 3d human
pose estimation. In Proceedings of the IEEE inter-
national conference on computer vision, pages 2640–
2649.
Rhodin, H., Salzmann, M., and Fua, P. (2018). Unsu-
pervised geometry-aware representation for 3d human
pose estimation. In Proceedings of the European con-
ference on computer vision (ECCV), pages 750–767.
Sun, K., Xiao, B., Liu, D., and Wang, J. (2019). Deep high-
resolution representation learning for human pose es-
timation. In Proceedings of the IEEE/CVF conference
on computer vision and pattern recognition, pages
5693–5703.
Sun, X., Xiao, B., Wei, F., Liang, S., and Wei, Y. (2018).
Integral human pose regression. In Proceedings of
the European conference on computer vision (ECCV),
pages 529–545.
Toshev, A. and Szegedy, C. (2014). Deeppose: Human pose
estimation via deep neural networks. In Proceedings
of the IEEE conference on computer vision and pat-
tern recognition, pages 1653–1660.
Yu, T., Zheng, Z., Guo, K., Zhao, J., Dai, Q., Li, H., Pons-
Moll, G., and Liu, Y. (2018). Doublefusion: Real-
time capture of human performances with inner body
shapes from a single depth sensor. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 7287–7296.
Zhang, J., Tu, Z., Yang, J., Chen, Y., and Yuan, J. (2022).
Mixste: Seq2seq mixed spatio-temporal encoder for
3d human pose estimation in video. In Proceedings
of the IEEE/CVF conference on computer vision and
pattern recognition, pages 13232–13242.
Zhao, Q., Zheng, C., Liu, M., Wang, P., and Chen, C.
(2023). Poseformerv2: Exploring frequency domain
for efficient and robust 3d human pose estimation.
Zheng, C., Wu, W., Chen, C., Yang, T., Zhu, S., Shen, J.,
Kehtarnavaz, N., and Shah, M. (2023). Deep learning-
based human pose estimation: A survey. ACM Com-
puting Surveys, 56(1):1–37.
Zheng, C., Zhu, S., Mendieta, M., Yang, T., Chen, C., and
Ding, Z. (2021). 3d human pose estimation with spa-
tial and temporal transformers. Proceedings of the
IEEE International Conference on Computer Vision
(ICCV).
Zhi, T., Lassner, C., Tung, T., Stoll, C., Narasimhan, S. G.,
and Vo, M. (2020). Texmesh: Reconstructing detailed
human texture and geometry from rgb-d video. In
Computer Vision–ECCV 2020: 16th European Con-
ference, Glasgow, UK, August 23–28, 2020, Proceed-
ings, Part X 16, pages 492–509. Springer.
APPENDIX
To provide further illustration, the figures included in
this appendix offer additional context and detailed in-
sights in comparison to PoseFormer estimations.
Three actions of SittingDown, Directions and
Photo from test set S9 are presented to provide fur-
ther illustration. Figure 8 to Figure 10, compare the
MPJPE across all joints and all frames of the afore-
mentioned actions to demonstrate the extent of the
improvement in each joint when the method utilized
prior body dimensions. Figure 11 to Figure 13 present
the same comparison when the method employed es-
timated body dimensions.
Figure 6 and Figure 7 illustrate the MPJPE over
400 frames of the action SittingDown and Directions
for test set S9 of the Human3.6M dataset. The fig-
ures demonstrate the extent to which the refinement
process reduced the MPJPE, utilizing both prior body
dimensions and estimated body dimensions.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
218
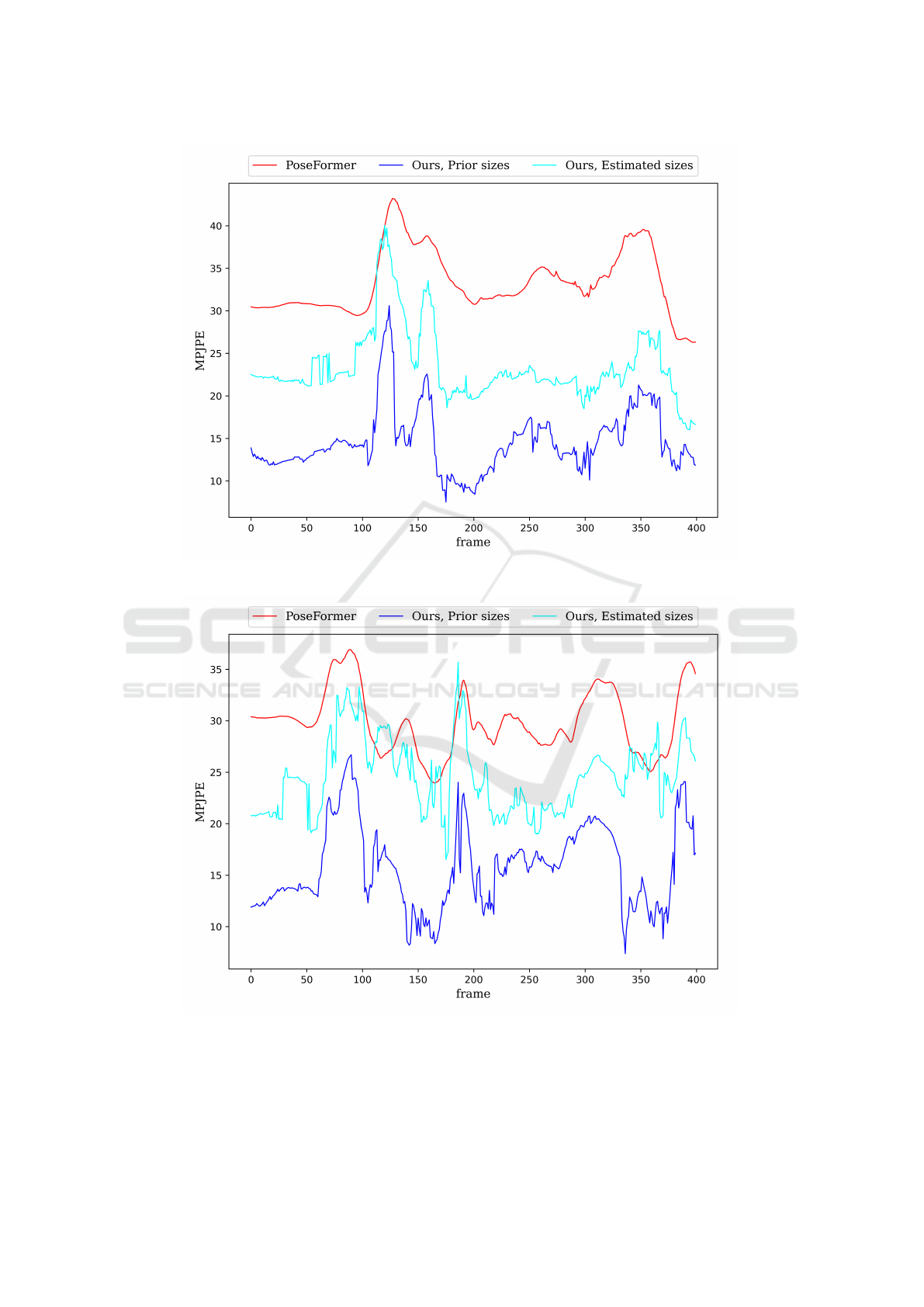
Figure 6: Comparison of the MPJPE values across 400 frames of test set S9, action SittingDown of the Human3.6M dataset.
(ground truth 2D pose and prior body dimensions vs. ground truth 2D pose and estimated body dimensions vs. PoseFormer).
Figure 7: Comparison of the MPJPE values across 400 frames of test subject S9, action Directions of the Human3.6M dataset.
(ground truth 2D pose and prior body dimensions vs. ground truth 2D pose and estimated body dimensions vs. PoseFormer).
Enhancing 3D Human Pose Estimation: A Novel Post-Processing Method
219
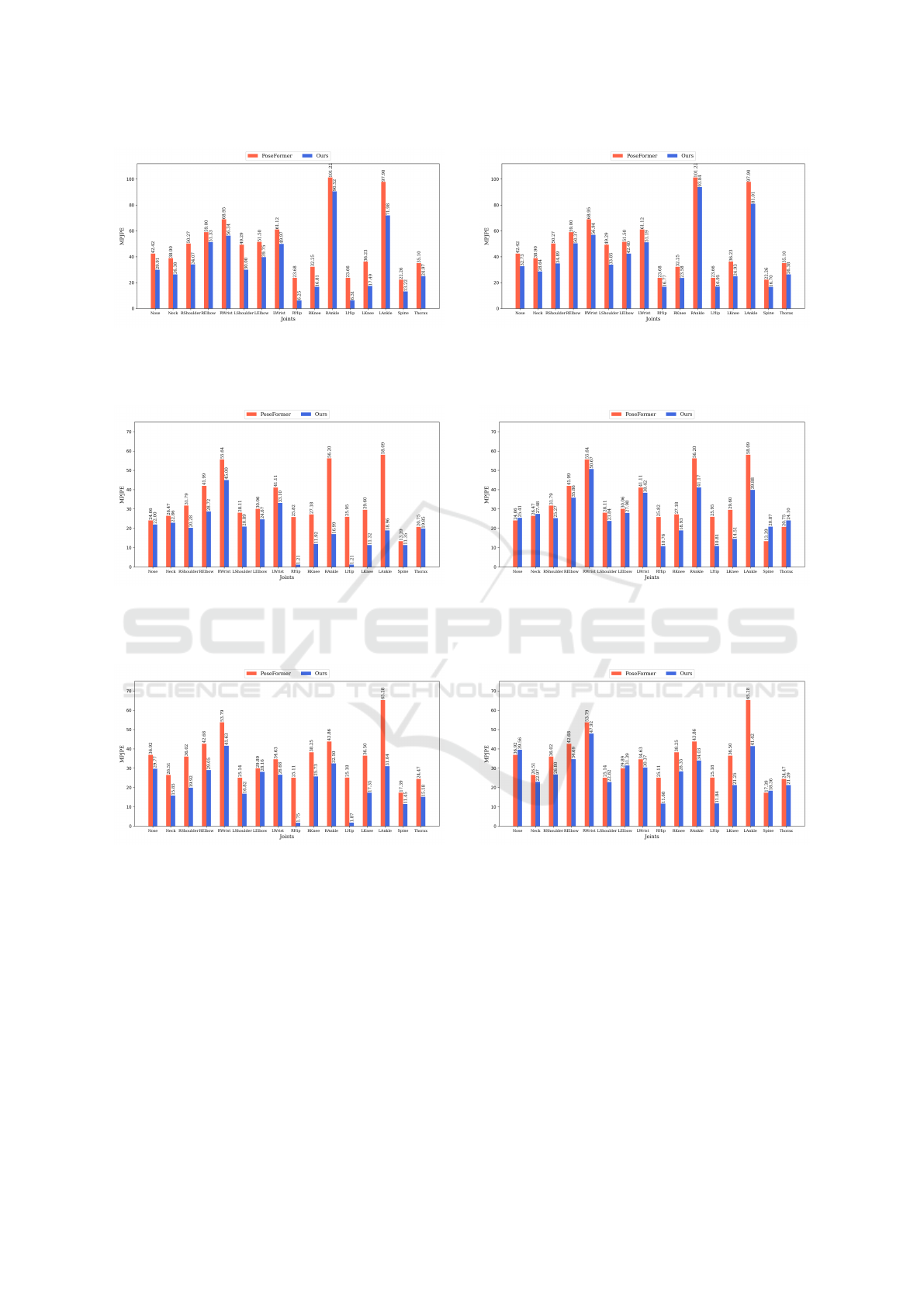
Figure 8: Comparison of the MPJPE values of all joints
across all frames of test set S9, action SittingDown of the
Human3.6M dataset. (using ground truth 2D pose and prior
body dimensions).
Figure 9: Comparison of the MPJPE values of all joints
across all frames of test set S9, action Directions of the Hu-
man3.6M dataset. (using ground truth 2D pose and prior
body dimensions).
Figure 10: Comparison of the MPJPE values of all joints
across all frames of test set S9, action Photo 1 of the Hu-
man3.6M dataset. (using ground truth 2D pose and prior
body dimensions).
Figure 11: Comparison of the MPJPE values of all joints
across all frames of test set S9, action SittingDown of the
Human3.6M dataset. (using ground truth 2D pose and esti-
mated body dimensions).
Figure 12: Comparison of the MPJPE values of all joints
across all frames of test set S9, action Directions of the Hu-
man3.6M dataset. (using ground truth 2D pose and esti-
mated body dimensions).
Figure 13: Comparison of the MPJPE values of all joints
across all frames of test set S9, action Photo 1 of the Hu-
man3.6M dataset. (using ground truth 2D pose and esti-
mated body dimensions).
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
220
