
Hierarchical Decomposition Framework
for Steiner Tree Packing Problem
Hanbum Ko
1,∗ a
, Minu Kim
2,∗ b
, Han-Seul Jeong
3 c
, Sunghoon Hong
3 d
, Deunsol Yoon
3 e
,
Youngjoon Park
3 f
, Woohyung Lim
3 g
, Honglak Lee
3 h
, Moontae Lee
3 i
, Kanghoon Lee
3 j
,
Sungbin Lim
4 k
and Sungryull Sohn
3 l
1
Department of Artificial Intelligence, Korea University, Korea
2
Kim Jaechul Graduate School of AI, KAIST, Korea
3
LG AI Research, U.S.A.
4
Department of Statistics, Korea University, Korea
Keywords:
Hierarchical Reinforcement Learning, Neural Combinatorial Optimization, Steiner Tree Packing Problem.
Abstract:
In this paper, we address the complex combinatorial optimization (CO) challenge of efficiently connecting
objects at minimal cost, specifically within the context of the Steiner Tree Packing Problem (STPP). Tradi-
tional methods often involve subdividing the problem into multiple Steiner Tree Problems (STP) and solving
them in parallel. However, this approach can fail to provide feasible solutions. To overcome this limitation,
we introduce a novel hierarchical combinatorial optimizer (HCO) that applies an iterative process of dividing
and solving sub-problems. HCO reduces the search space and boosts the chances of getting feasible solutions.
This paper proposes for the first time a learning-based approaches to address STPP, introducing an iterative
decomposition method, HCO. Our experiments demonstrate that HCO outperforms existing learning-based
methods in terms of feasibility and the quality of solutions, and showing better training efficiency and gener-
alization performance than previous learning-based methods.
1 INTRODUCTION
The challenge of optimizing connections at minimal
cost is crucial across various domains. In logistics and
transportation networks, efficient route design is cru-
cial for connecting warehouses, markets, and facto-
a
https://orcid.org/0000-0002-2601-0974
b
https://orcid.org/0000-0002-8126-4387
c
https://orcid.org/0000-0002-3525-8699
d
https://orcid.org/0000-0002-6745-5005
e
https://orcid.org/0000-0002-1069-112X
f
https://orcid.org/0000-0002-3950-3065
g
https://orcid.org/0000-0003-0525-9065
h
https://orcid.org/0000-0002-4109-327X
i
https://orcid.org/0000-0001-5542-3463
j
https://orcid.org/0000-0002-2077-7146
k
https://orcid.org/0000-0003-2684-2022
l
https://orcid.org/0000-0001-7733-4293
∗
This work was conducted during an internship at LG
AI Research.
ries. Urban planning requires the cost-effective link-
age of infrastructure, while chip design demands the
minimal-cost connection of electronic components to
enhance data movement and signal stability. De-
termining the optimal configuration from numerous
possibilities is a complex combinatorial optimization
(CO) problem, often referred to as the Steiner Tree
Packing Problem (STPP). STPP aims to identify a set
of minimum-cost edges that connect specific terminal
nodes without overlap, and it can be decomposed into
simpler Steiner Tree Problems (STP) (Karp, 1972),
where the objective is to connect all given terminal
nodes with the least number of edges.
The approach of dividing the CO problem into
multiple sub-problems and solving the divided sub-
problems in parallel—before even solving the first
sub-problem—has seen numerous attempts in various
problems such as the vehicle routing problem (VRP)
and the traveling salesman problem (TSP) (Nowak-
Vila et al.; Hou et al.; Fu et al.; Ye et al.). This
Ko, H., Kim, M., Jeong, H.-S., Hong, S., Yoon, D., Park, Y., Lim, W., Lee, H., Lee, M., Lee, K., Lim, S. and Sohn, S.
Hierarchical Decomposition Framework for Steiner Tree Packing Problem.
DOI: 10.5220/0013317800003893
In Proceedings of the 14th International Conference on Operations Research and Enterprise Systems (ICORES 2025), pages 165-176
ISBN: 978-989-758-732-0; ISSN: 2184-4372
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
165

separation of concerns, which involves splitting the
model into one that only divides the problem and
another that solves the divided problems, enhances
time efficiency by solving the problems in parallel.
The STPP is another CO problem that can be divided
into multiple sub-problems (i.e., STP). However, this
method significantly increases the risk of not obtain-
ing a feasible solution. To address this disadvan-
tage, we propose a hierarchical combinatorial opti-
mizer (HCO) that iteratively processes the dividing
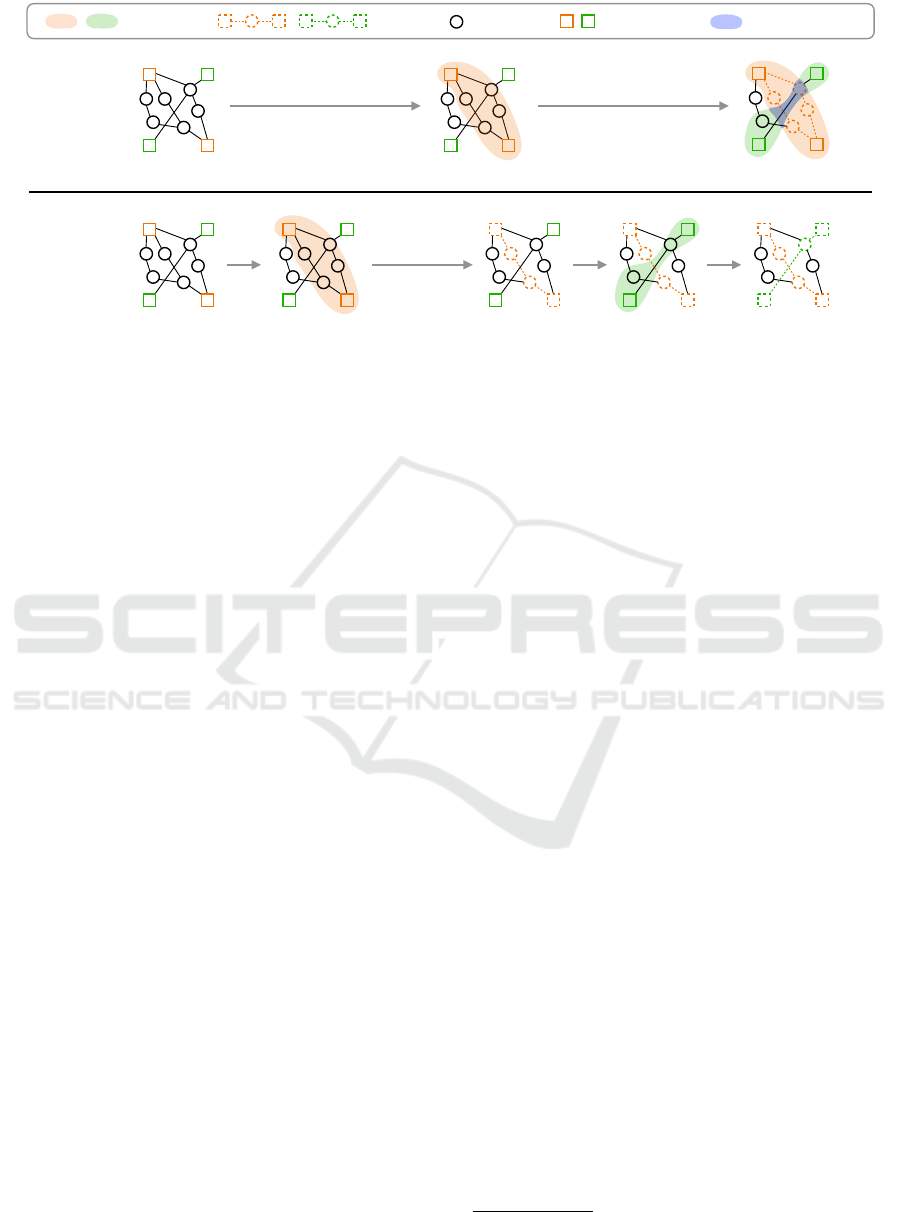
and solving stages. An example of this is shown in
Figure 1. The Two-stage Divide Method (TAM) (Hou
et al., 2022) involves dividing all sub-problems before
solving any of them, whereas the HCO represents a
case where the process of dividing and solving sub-
problems is done iteratively. In the leftmost graph,
which is an STPP instance, circular nodes represent
normal nodes, while square nodes represent terminal
nodes. The different colors of the square nodes in-
dicate different types of terminal nodes, and the ob-
jective of STPP is to connect terminal nodes of the
same type with minimal cost. The main issue with ap-
plying the TAM to solve the STPP is that it assumes
all nodes of a specific color (apricot, in this case) are
selected before choosing the next sub-problem to di-
vide. This leads to a scenario where green nodes may
not have the opportunity to connect with the only fea-
sible node. Conversely, the HCO, by re-evaluating the
solution of the divided STP problem, creates the pos-
sibility to connect the green terminal nodes.
We refer to problems where a feasible solution
may not emerge as feasibility-hard problems. In this
study, we propose the HCO method to more effec-
tively address these challenges. Additionally, we
mathematically demonstrate that HCO can reduce the
search space through latent mapping to a smaller so-
lution space. We argue that HCO has the following
advantages: First, as observed in the examples in Fig-
ure 1, it can more effectively find feasible solutions.
Second, by reducing the search space, it alleviates
the burden on models that must consider both the ob-
jective and feasibility of the CO problem simultane-
ously. Third, it benefits from time efficiency by utiliz-
ing accurate and fast models that solve sub-problems
well. Lastly, the model that divides a large prob-
lem into smaller ones reduces the distribution shift
issue by partitioning the graph. This ensures that sub-
problems only see problems of similar size STP, thus
offering advantages in generalization.
In this paper, we detail the Markov decision prob-
lem (MDP) formulation for finding solutions to CO
problems and introduce the application of this formu-
lation to the STPP. We then describe how we apply
this formulation to solve problems using a hierarchi-
cal policy involving high-level and low-level policies.
Our experiments demonstrate that the HCO, defined
in this manner, more successfully finds feasible so-
lutions and produces higher quality solutions com-
pared to the method of dividing and solving the prob-
lem at once (TAM) and the method of solving STPP
at once without hierarchical decomposition (Khalil
et al.; Kool et al.).
Our contributions are summarized as follows:
• To our knowledge, this is the first work to solve
Steiner tree packing problem using an end-to-end
learning framework.
• We propose a novel decomposition approach for
general CO problems that results in sub-problems
with smaller search spaces.
• We demonstrate that HCO is advantageous over
other methods in terms of finding feasible solu-
tions and the optimal gap of the found solutions.
Additionally, HCO exhibits the ability to general-
ize to larger problem sizes.
2 RELATED WORKS
Combinatorial Optimization with Feasibility-
Hard Constraints. There have been few attempts
to directly tackle CO problems with feasibility-hard
constraints using RL. Ma et al. (2021) proposed
learning two separate RL models, with each model
respectively solving the constraint satisfaction and
objective optimization problems. Cappart et al.
(2021) manually shaped the reward to bias the RL
process toward predicting feasible solutions and
combined this approach with constraint programming
methods to guarantee the feasibility of the solutions.
Our work indirectly tackles the feasibility-hard
constraint by decomposing the given constraint
satisfaction problem into two easier sub-problems
with smaller problem size and search space, allowing
the learning algorithm to efficiently solve each
sub-problem.
Decomposition of Combinatorial Optimization
Problem. Several decomposition methodologies
have been introduced to address a variety of CO chal-
lenges. Nowak-Vila et al. (2018) introduced a Divide-
and-Conquer (DnC) framework focusing on scale-
invariant problems, which assumes the problem can
be split into sub-problems, solved independently, and
subsequently merged to form a full solution. Hou
et al., Fu et al. and Ye et al. proposed the domain-
specific approaches to divide problems and merge
partial solutions (via heatmap and MCTS) for VRP
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
166
TAM
Infeasible solution
HCO!
(Ours)
1
1
2
2
1
1
2
2
1
1
2
2
1
1
2
2
1
1
2
2
Feasible solution
Solve subproblem
: Subproblem
,
: Solution
,
: Normal node
,
: Terminal node
: Subproblem overlap
(1) (2)
(3)
(1) (2)
Figure 1: Comparison of two decomposition methods in the Steiner tree packing problem (STPP). (Top) TAM divides the
problem into subproblems all at once, allowing overlapping vertices between them. The entire solution may be infeasible if
the solutions of subproblems overlap. (Bottom) HCO, on the other hand, solves the problem iteratively by: 1) selecting a
sub-graph to define a subproblem, 2) solving the identified subproblem, 3) reflecting its solution, and repeating this process
until the entire problem is solved. Since HCO defines each subproblem by considering all previous solutions, it can more
effectively find a feasible solution compared to TAM.
and TSP, respectively. Despite their utility, the ap-
plicability of such DnC-based methods is limited by
their reliance on scale invariance, often leading to in-
feasible solutions when this assumption is violated.
In a different vein, local search-based methods by
Song et al. and Li et al. require an initial solution
to iteratively refine decision variables, which is a no-
table constraint. Wang et al. (2021) further inves-
tigated a bi-level formulation, where the high-level
problem modifies the given problem instance and the
low-level problem solves the modified instance, to
ease problem solving. However, this occasionally re-
sulted in more complex instances (e.g., a feasible so-
lution may not exist) and suboptimal solutions. Our
algorithm HCO also adopts the bi-level formulation
but sidesteps these issues by preserving the original
problem structure.
3 PRELIMINARIES
3.1 Combinatorial Optimization as
Markov Decision Process
Combinatorial optimization (CO) is a mathematical
optimization over a finite set, with a discrete feasible
solution space. Formally, a combinatorial optimiza-
tion problem can be written as follows.
argmin
x
x
x∈X
{f (x
x
x) : x
x
x ∈F } (1)
where X is a finite support for the variable x
x
x, F ⊂ X
is a set of feasible solutions
1
, and f : X → R is an
objective function of the CO problem. For instance,
a mixed integer linear programming (MILP) problem
with n variables and m constraints can be written in
the form
argmin
x
x
x∈Z
p
×R
n−p
{c
c
c
⊤
x
x
x : A
A
Ax
x
x ≤b
b
b, x
x
x ≥0
0
0} (2)
where A
A
A ∈ R
n×m
, b
b
b ∈ R
m
, and c
c
c ∈ R
n
.
Most of the CO problems can be formulated as a
Markov Decision Process (MDP) Khalil et al.; Gasse
et al.. Formally, it makes two assumptions to the CO
problem: 1) the solution space X of the original prob-
lem (1) is a finite vector space and 2) the objective f
is linear on X , so that for any given decomposition
of X into direct sum of subspaces X = X
1
⊕···⊕X
n
,
we have f (x
x
x) =
∑
n
i=1
f (x
x
x
i
) for each x
x
x
i
∈X
i
. Then, the
original problem (1) can be written as the following
sequential decision making problem:
argmin
x
x
x
t
∈X
t
, ∀t=1,···,H
X=X
1
⊕···⊕X
H
{
H
∑
t=1
f (x
x
x
t
) :
H
∑
t=1
x
x
x
t
∈ F }. (3)
The sequential decision can be thought of choos-
ing for each timestep t an action x
x
x
t
∈ X
t
, to receive
a reward R (s
t
,a
t
) = −f (a
t
) and a large negative
penalty c ≤ −sup
x∈X
f (x) if and only if any future
choice of action inevitably leads to an infeasible so-
lution at the end of the horizon. The optimal policy
π
∗
∈ Π for the original problem can be found upon
maximizing the expected return.
1
F is either discrete itself or can be reduced to a discrete
set.
Hierarchical Decomposition Framework for Steiner Tree Packing Problem
167

π
∗
= argmax
π∈Π
E
π
h
∑
H
t=1
R (s
t
,a
t
) | s
0
i
. (4)
We defer the rest of the details to Appendix. Note
that for some CO problems (e.g., TSP, MVC, Max-
Cut), carefully designing the action space can make
the constraint trivially satisfied (Khalil et al., 2017),
where in this case, reinforcement learning algorithm
can efficiently solve the problem. However, when
the constraint satisfaction is not guaranteed, the re-
inforcement learning methods often suffer from the
sparse reward problem, and does not learn efficiently.
In this work, we focus on the challenging CO prob-
lems, where designing action space cannot guarantee
the constraint satisfaction (i.e., feasibility-hard con-
straint): the Steiner tree packing problem.
3.2 Steiner Tree Packing Problem
A Steiner Tree Problem (STP) can be thought of as a
generalization of a minimum spanning tree problem,
where given a weighted graph and a subset of its ver-
tices (called terminals), one aims to find a tree (called
a Steiner tree) that spans all terminals (but not nec-
essarily all nodes) with minimum weights. Although
minimum spanning tree problem can be solved within
polynomial time, the Steiner tree problem itself is
a NP-complete combinatorial problem (Karp, 1972).
Formally, let G = (V,E) be an undirected weighted
graph, w
e
for e ∈ E its edge weights, and T ⊂ V be
the terminals. Then, a Steiner tree S is a tree that
spans T such that its edge weight is minimal. Hence,
the optimization problem for STP can be written as
follows.
argmin
x
x
x∈2
E
{
∑
e∈x
x
x
w
e
: x
x
x ∈Σ
T
} (5)
where 2
E
is a power set of E, and Σ
T
is a set of all
Steiner trees that span T . A more generalized version
of the above Steiner tree problem is called the Steiner
Tree Packing Problem, (STPP) where one has a col-
lection T of N disjoint non-empty sets T
1
,··· ,T
N
of
terminals called nets, that has to be packed with dis-
joint Steiner trees S
1
,··· ,S
N
spanning each of the nets
T
1
,··· ,T
N
. The optimization problem for STPP can
be written similarly, with N variables.
argmin
x
x
x
1
,···,x
x
x
N
∈2
E
{
∑
n≤N
e∈x
x
x
n
w
e
: x
x
x
n
∈Σ
T
n
, G[x
x
x
n
] ∩G[x
x
x
m
]=
/
0
∀n,m
} (6)
where G[x
x
x] is a subgraph of G generated by x
x
x ⊂E.
4 BI-LEVEL DECOMPOSITION
FOR STEINER TREE PACKING
PROBLEM
The goal of this section is to formulate our bi-level
framework for STPP and the corresponding MDP,
which allows us to use a hierarchical reinforcement
learning policy that efficiently learns to solve CO
problems.
Let us introduce a continuous surjective latent
mapping φ : X → Y onto a vector space Y such that
|Y | ≪ |X|. Then, the problem (1) admits a hierarchi-
cal solution concept:
y
y
y
∗
= argmin
y
y
y∈Y
{f (L(y
y
y)) : φ
−1
(y
y
y) ∩F ̸=
/
0} (7)
where, L(y
y
y) := argmin
x
x
x∈φ
−1
(y
y
y)
{f (x
x
x) : x
x
x ∈F }. (8)
We refer to problem (7) as a high-level problem, and
(8) as a low-level sub-problem induced by the high-
level action y
y
y in (7). Note that the hierarchical so-
lution concept still attains an optimality guarantee of
the original problem, since φ is a surjection and X is
finite.
The advantages of such hierarchical formulation
are: (i) searching for feasible solutions over Y rather
than X reduces the size of search space; (ii) learn-
ing to obtain an optimal solution can be done by
two different learnable agents, (namely the high-level
agent and the low-level agent for (7) and (8), re-
spectively) where the task for each agent is reduced
to be easier than the original problem, and (iii) the
generalization capability (with respect to the problem
size) increases when using learnable agents, since the
high-level agent can be made to always provide sub-
problems (for the low-level agent) with the same size,
regardless of the size of the original problem.
4.1 Hierarchical Decomposition for
Steiner Tree Packing Problem
For CO problems defined on a weighted graph G =
(V,E) with edge weights w
e
for each e ∈ E, it is
straight-forward and beneficial to choose a latent
mapping φ : E → V from the set of edges to the set
of nodes.
2
Specifically, we consider a version of φ
such that for any input x
x
x ⊂ E, u ∈ φ(x
x
x) if and only
if (u,v) ∈ x
x
x for some v ∈ V (G). Such a mapping φ
satisfies φ
−1
(y
y
y) = G[y
y
y] for any set of vertices y
y
y ⊂V ,
where we slightly overload the notation for the gener-
2
Since |V | ≈ O(
p
|E|), so that |Y | << |X| for large
graphs.
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
168
Initial Instance
Solution
ϕ
−1
(y) ⊂ X
y ∈ Y
⋮
Y
Latent
Mapping
ϕ
Bi-level Decomposition for STPP
Possible solutions in original problem
Possible solutions in
high-level problem
|
X
|
>>
|
Y
|
⋮
⋮
X
MDP Formulation for STPP
High-Level Policy
Low-Level Policy
Final Solution
Steiner Tree Packing Problem
Terminals
Non-terminal nodes
Low-level action
High-level action (shaded region)
Low-level
search space
Partial solution
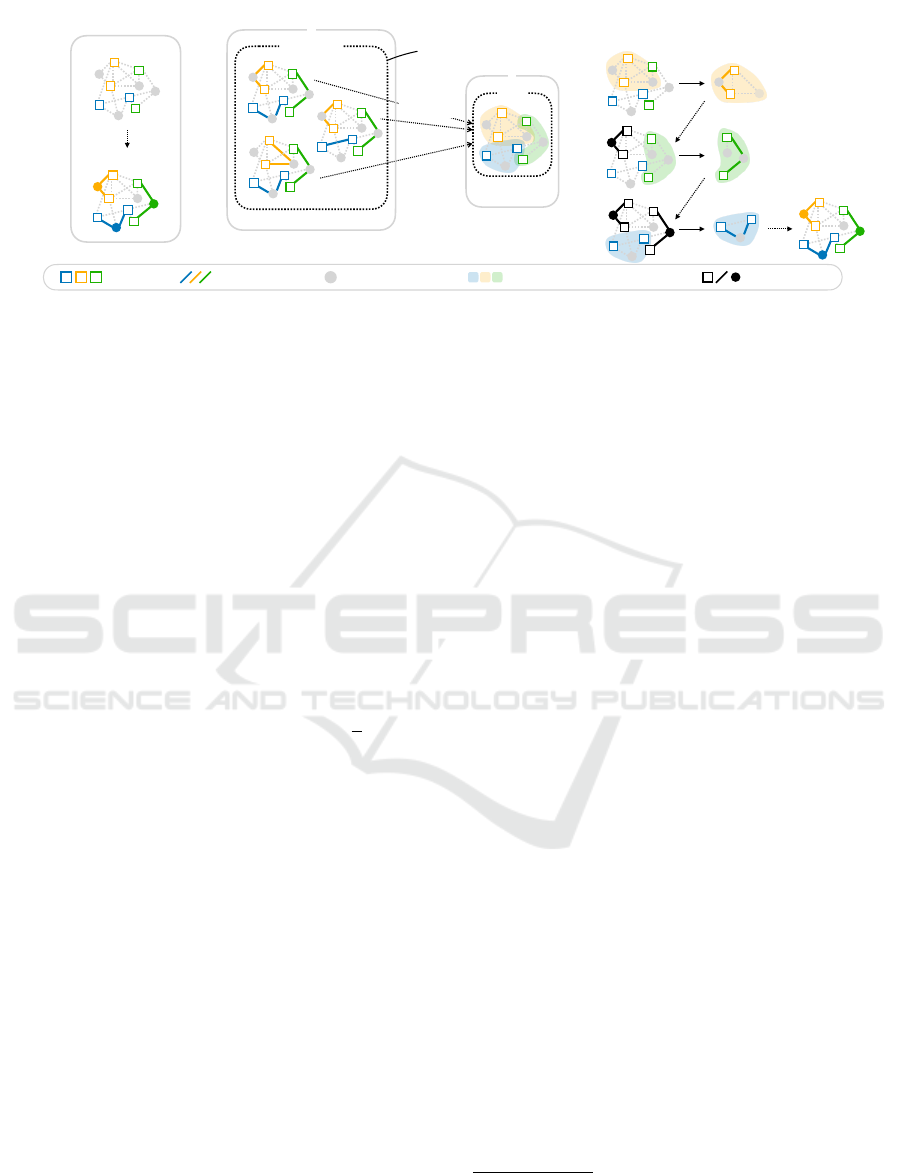
Figure 2: (Left) We tackle the Steiner tree packing problem, which aims to find a minimum-weight tree spanning all the
terminal nodes (square boxes) for each type (color) without overlap. (Middle) We propose to decompose the given problem
into high-level and low-level sub-problems via mapping φ : X 7→ Y , which are solved separately. This facilitates learning
since the search spaces are much smaller for high-level problem |Y | ≪ |X| and low-level problem |φ
−1
(y)| ≪ |X| compared
to the original problem. (Right) In MDP formulation, the high-level agent chooses a set of nodes (shaded region) to define a
sub-graph for each terminal type (color), and low-level agent finds a tree spanning all the terminal nodes within the sub-graph.
ated subgraph G[y
y
y]. For example, the high-level prob-
lem of a STPP (6) can be written as follows.
argmin
y
y
y
1
,···,y
y
y
N
∈2
V
{
∑
n≤N
e∈L(y
y
y
n
)
w
e
: L(y
y
y
n
)∈Σ
T
n
, y
y
y
n
∩y
y
y
m
=
/
0
∀n,m
} (9)
which is now a node-selection problem, (instead of
the original edge selection problem) where L(y
y
y
n
) is a
solution of the low-level subproblem:
L(y
y
y
n
) := arg min
x
x
x∈E(G[y
y
y
n
])
{
∑
e∈x
x
x
w
e
: x
x
x ∈Σ
T
n
} (10)
Notice that the high-level problem (9) has a reduced
size search space (from 2
E
to 2
V
≈ O(2
√
E
)) , and
the low-level subproblem corresponds to a single STP
of a smaller subgraph G[y
y
y
n
]. Therefore, the original
NP-hard problem (6) is decomposed into two smaller
NP-hard problems. The overview of our hierarchical
decomposition method for STPP is illustrated in Fig-
ure 2.
4.2 MDP Formulation and Hierarchical
Policy for Steiner Tree Packing
Problem
The high-level MDP M
hi
for STPP is based on
a sequential decision making y
y
y
1
,··· ,y
y
y
N
in equa-
tion 9. Formally, a state in the MDP is a tuple
s
t
= (G, T ,S
t
,t), where G is a weighted graph of the
problem, T the collection of set of terminals, and
S
t
⊂ V (G) is a partial solution constructed until the
current timestep t via previous actions. An action a
t
is
to select a set of vertices y
y
y
t
⊂V (G)\S which includes
a tree that spans the terminals T
t
∈T as a subgraph of
G[y
y
y
t
]. In turn, the subgraph G[y
y
y
t
] is forwarded to the
low-level agent which solves STP on the given sub-
graph by choosing the edges from E(G[y
y
y
t
]). Then,
the high-level agent receives negative of the sum of
the edge weights of the low-level solution L(y
y
y
t
) as
a reward, and appends the solution L(y
y
y
t
) to the pre-
vious partial solution S
t
.
3
If the low-level solution
L(a
t
) does not exist, or when any future choice of ac-
tions a
t+1
,··· ,a
N
leads to an infeasible solution of the
given STPP, the high-level agent receives a large neg-
ative penalty C < 0.
In the prior decomposition method (i.e., TAM),
V (L(y
y
y
t
)) and V (G[y
y
y
t
]) are the same. In other words,
once nodes are selected as a high-level action, they
are all used in the low-level solution, which prevents
the next high-level policy from selecting any of the
V (L(y
y
y
t
)) from the previous step. However, in the
STPP, as shown in Figure 1, using all nodes that con-
stitute the low-level problem, V (G[y
y
y
t
]), often leads to
a low probability of finding a feasible solution. HCO
reduces the likelihood of this occurring by removing
only V (L(y
y
y
t
)) from V (G) after getting the low-level
solution. We defer detailed settings of our MDP for-
mulation to the Appendix.
Model Architecture. Since STPP is a CO prob-
lem defined over a weighted graph, we use a graph
neural network (GNN) to encode the state repre-
sentation with the policy network π
θ
and the value
function V
π
θ
that serves as a baseline for actor-
critic methods (Konda and Tsitsiklis, 1999). Let
G be the weighted graph with edge weights w
e
as
3
Here, the low-level sub-problem can again be defined
by a MDP M
lo
, which is equivalent to the original deci-
sion making process (3) but on a smaller problem instance
span(φ
−1
(a
t
)).
Hierarchical Decomposition Framework for Steiner Tree Packing Problem
169

an edge feature for each e ∈ E(G). First, a D-
dimensional node feature µ
µ
µ
v
is computed for each
node v ∈ V . Please refer to Appendix for our de-
tailed choice of node and edge features. Then, the
extracted features are encoded with graph attention
network (GAT) (Veli
ˇ
ckovi
´
c et al., 2018) and atten-
tion network (AT) (Vaswani et al., 2017). GAT ag-
gregates the information across the neighbors in the
graph to capture the local connectivity, but it is lim-
ited in modeling the long-range dependency (Vaswani
et al., 2017). We overcome the limitation by using
the attention network. The attention network captures
the long-range dependency by encoding relation be-
tween all (i.e., ignores the graph structure) pairs of
nodes. Global structures are further encoded via a
graph embedding layer, which embeds particular sub-
sets of node features into groups based on their char-
acteristics.
We use behavioral cloning and reinforcement
learning to train high-level policy and use a mathe-
matical solver (i.e., MILP solver) for solving the low-
level problem (10) in our implementation
4
.
5 EXPERIMENTS
5.1 Setting
Dataset. To evaluate the learning efficiency and
generalization capacity of each algorithm, we cre-
ated feasibility-hard STPP instances at various scales.
Our instances included graphs of 40, 60, 80, and 100
nodes. For each graph category, we generated 50,000
instances for training, 1,000 for testing, and 100 for
validation. Graphs were created using the Watts-
Strogatz (WS) model (Watts and Strogatz, 1998)
with mean node degree k ∼ Uniform(3,4,5,6) and
rewiring probability β ∼Uniform(0,1). Edge weights
were uniformly random within [0,1]. A subset of ver-
tices was selected as terminals (see Section 3.2) to
construct the STPP instances. To avoid unsolvable
or trivially solvable instances, we designed a termi-
nal selection algorithm ensuring instances were both
solvable and non-trivial. We partitioned the random
graph into T = N
type
subgraphs using Lukes algo-
rithm (Lukes, 1974), then chose N
terminal
terminals per
subgraph. Each subgraph ensured a spanning tree, but
we filtered out trivial or unsolvable instances.
4
Since our decomposition keeps the size of low-level
subproblem small, we can run the MILP solver in a short
time.
Figure 3: Training performance of the HCO for problem
size n = 40. We pre-trained the agents via behavioral
cloning until 5 millions episodes (i.e., vertical dotted line
in the figure), and then finetuned via reinforcement learning
afterwards. We report the performance averaged over 4 ran-
dom seeds.
Baselines. We compare our model with following
baselines. MILP-t utilizes the mixed integer linear
programming (MILP) solver to identify the best so-
lution within a specified time limit, denoted by t.
Our implementation employs OR-Tools (Perron and
Furnon, 2022) to achieve this. For a fair compari-
son, we set t to 1 second for MILP-t roughly matching
the execution time of the compared methods. MILP-
∞ on the other hand, is the MILP solver operating
without any time constraints, enabling it to find the
optimal solution. PathFinder (McMurchie and Ebel-
ing, 1995) is a heuristic algorithm designed to solve
the STPP, as detailed in Section 2. We used a pub-
licly available implementation of Lee et al. (2022),
which includes two variations of low-level solvers:
the shortest-path finding variant (PathFinder-SP) and
the two-approximation variant (PathFinder-TA). Flat
represents a non-hierarchical RL agent that constructs
a solution by sequentially selecting nodes one by one,
following the methodology outlined in studies Khalil
et al.; Kool et al.. The Two-stage Divide Method
(TAM) (Hou et al., 2022) addresses the STPP by de-
composing it entirely in a single step, after which each
sub-problem is addressed individually. This method
differs from the HCO approach, which iteratively se-
lects and solves one sub-problem at a time.
Training. We discovered that starting training with
a random policy made it difficult to obtain feasible so-
lutions, resulting in minimal learning signals. There-
fore, for HCO training, we perform pre-training us-
ing behavioral cloning, followed by fine-tuning with
IMPALA (Espeholt et al., 2018). The behavioral
cloning data was generated using a solver OR-Tools,
and training was conducted using cross-entropy loss.
The training was conducted for 500K episodes to en-
sure convergence to some extent in all methods. We
used the reinforcement learning framework RLlib for
training with IMPALA. Hyperparameters were deter-
mined based on performance on the validation set,
and the detailed process is described in Appendix.
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
170

Table 1: Result table for Steiner tree packing problem. Gap and FSR denote the average optimality gap and feasible solution
ratio, respectively, while ET represents the average time taken to process a test instance. We report the performance averaged
over 4 random seeds.
n = 40 n = 60
Method Gap↓ FSR↑ ET (ms)↓ Gap↓ FSR↑ ET (ms)↓
Learning-based
HCO (Ours) 0.039 0.969 38 0.031 0.953 99
TAM 0.105 0.885 17 0.128 0.914 46
Flat 0.045 0.957 106 0.087 0.935 252
Heuristic
MILP-1s 0.000 1.000 127 0.000 0.982 501
PathFinder-SP 0.112 0.974 5 0.165 0.990 8
PathFinder-TA 0.116 0.966 19 0.147 0.974 48
Exhaustive MILP-∞ 0.000 1.000 125 0.000 1.000 532
n = 80 n = 100
Method Gap↓ FSR↑ ET (ms)↓ Gap↓ FSR↑ ET (ms)↓
Learning-based
HCO (Ours) 0.054 0.932 124 0.056 0.892 246
TAM 0.246 0.620 47 0.291 0.520 47
Flat 0.087 0.902 529 0.062 0.905 679
Heuristic
MILP-1s 0.001 0.832 975 0.000 0.035 1007
PathFinder-SP 0.150 0.976 20 0.155 0.970 35
PathFinder-TA 0.149 0.965 115 0.150 0.954 170
Exhaustive MILP-∞ 0.000 1.000 1648 0.000 1.000 4685
Table 2: Generalization performance in terms of Common
Instance Gap (CIG). The CIG measures the Gap averaged
over the instances where all methods (HCO, TAM, Flat)
found feasible solutions. Models are trained with n = 40
and are tested with n = {40, 60,80,100}. We report perfor-
mance averaged over 4 random seeds.
n = 40 n = 60
HCO (Ours) 0.033 (±0.001) 0.033 (±0.002)
TAM 0.090 (±0.007) 0.332 (±0.026)
Flat 0.065 (±0.012) 0.086 (±0.014)
n = 80 n = 100
HCO (Ours) 0.041 (±0.003) 0.059 (±0.006)
TAM 1.017 (±0.113) 2.910 (±0.126)
Flat 0.120 (±0.014) 0.260 (±0.056)
Table 3: The average likelihood of decomposition policy
selecting trap nodes, optimal nodes, and redundant nodes
for test instances with n = 40 and |T | = 2.
Trap↓ Optimal↑ Redundant↓
HCO (Ours) 0.422 0.887 0.608
TAM 0.494 0.898 0.747
Evaluation. We use three metrics to evaluate the
algorithm’s capability to minimize the cost and sat-
isfy the constraint. Feasible solution ratio (FSR)
is the ratio of instances where a feasible (i.e., con-
straint is satisfied) solution was found by the method.
Since the solution cost can be computed only for
a feasible solution, we also introduce the metric
optimality gap (Gap), measuring the average of
the cost suboptimality in feasible solutions found:
Gap=
algorithm cost
optimal cost
−1
. Finally, elapsed time (ET)
measures the average wall clock time taken to solve
each instance in the test set. We report the perfor-
mance averaged over four random seeds.
5.2 Result
Generalization to Unseen Instances with the Same
Graph Size. Table 1 summarizes the performance
of each method when the training and test sets con-
sist of graphs of the same size but are mutually ex-
clusive. The top three rows compare the learning-
based algorithms: HCO, TAM, Flat. Overall, HCO
is the most performant algorithm in terms of Gap
and FSR. We observe that HCO consistently outper-
forms Flat with much less computation required (i.e.,
smaller ET). Our hierarchical framework improves
the sample efficiency of reinforcement learning by re-
ducing the search space in high-level and low-level
problems, leading to HCO’s superior performance in
Hierarchical Decomposition Framework for Steiner Tree Packing Problem
171

Gap and FSR. Also, Flat sequentially solves prob-
lem by choosing the node one by one without de-
composition, which requires more number of feed-
forwards (i.e., higher ET) per problem compared to
HCO. As shown in Figure 1, TAM has a high proba-
bility of failing to obtain a feasible solution, result-
ing in a relatively low FSR. Additionally, we ob-
served that learning signals from infeasible solutions
significantly destabilize the training process. Rest
of the table summarizes the performance of heuristic
and exhaustive search-based methods. MILP-1s and
MILP-∞ performs search over solution space, where
MILP-1s constrains the search based on computation
time and MILP-∞ performs search exhaustively. We
note that MILP-based approaches excels in minimiz-
ing the cost once feasible solution is found, but suffers
from finding any feasible solution especially when the
problem size grows. This results in drastic degra-
dation in FSR for MILP-1s and ET for MILP-∞ for
larger-sized problems (n = 80 and 100). When we
compare PathFinder-based approaches to HCO, HCO
is significantly advantageous in terms of Gap. We at-
tribute the high FSR of PathFinder to their iterative
algorithm, negotiated-congestion avoidance, which is
tailored for finding feasible solutions in STPP.
Generalization to Unseen and Larger Instances.
To facilitate a clearer comparison, we introduce Com-
mon Instance Gap (CIG) metric, which evaluates the
Gap exclusively on instances where every compared
method identified a feasible solution. This approach
ensures a fair comparison ground. We present the CIG
performance, averaged across four distinct random
seeds in the Table 2 (values in parentheses represent
standard error). The results demonstrate HCO’s su-
perior performance over baseline methods across all
tested instance sizes (n = 40,60,80, 100), with a no-
tably wider performance margin against Flat in larger
or more novel instances (n = 80 and 100). This un-
derscores the bi-level formulation’s effectiveness in
enhancing generalization capabilities, even in more
challenging scenarios.
Analysis of Decomposition-Based Models. We
further evaluate the decomposition performance of
the decomposition-based models, HCO and TAM.
When the model decomposes the given problem into
sub-problems for each net, it must consider three
types of nodes. First, the trap node is a critical part of
another net’s solution and must not be used for solv-
ing the current net. Second, the optimal node is in-
cluded in the optimal solution. Third, the redundant
node refers to nodes that do not fall into either of the
previous categories. Generally, including redundant
nodes in the solution may increase the cost (i.e., sub-
optimal). Effective decomposition should avoid trap
and redundant nodes while incorporating as many op-
timal nodes as possible. To assess this, we measure
the average likelihood of each decomposition algo-
rithm (i.e., high-level policy) selecting trap, optimal,
and redundant nodes. Our analysis was conducted on
all instances with two nets (i.e., |T | = 2) from the
n = 40 test instances. The results are presented in Ta-
ble 3. Overall, TAM shows a higher likelihood of se-
lecting any type of node compared to HCO. Notably,
the likelihood of selecting optimal nodes is similar for
both HCO and TAM. This indicates that while both
methods are capable of effectively identifying nodes
that contribute to the optimal solution, TAM is less
successful at avoiding negative nodes (i.e., trap and
redundant nodes), which may lead to infeasible solu-
tions or suboptimality. This is further supported by
the results in Tables 1 and 2, where TAM shows a
larger Gap and lower FSR due to its higher tendency
to select redundant and trap nodes. This difference
in performance can be attributed to the methods’ ap-
proaches. Unlike TAM, which decomposes all prob-
lems at once, HCO re-evaluates and adjusts its decom-
position after reviewing the results of the low-level
problem, leading to more cautious decision-making.
Learning Curves. The learning curve for n = 40 is
shown in Figure 3. The supervised pre-training im-
proves both FSR and Gap of all the methods but the
performance improvement plateaus around 4M steps.
During RL finetuning, the FSR rapidly improves for
all the methods while Gap worsens. The observed
rise in FSR, indicating more feasible solutions, corre-
lates with a growing gap. This suggests that instances
solved later in training often need more training to
reach optimality. Consequently, as FSR rises sharply,
the model encounters many new instances for which
it initially only finds suboptimal (i.e., higher Gap) so-
lutions, leading to an increase in Gap.
6 CONCLUSIONS
In this work, we proposed a novel hierarchical ap-
proach to address challenges of finding feasible so-
lution for STPP. It uses latent mapping to decompose
the solution search space, resulting in more sample-
efficient learning due to separation of concerns and
a smaller search space, and improved generalization
from a homogeneous problem size for the low-level
policy. We showed that the proposed decomposition
framework is generally applicable to broader scope of
combinatorial optimization problems. The effective-
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
172

ness of our method was evaluated on various sizes of
STPP instances, demonstrating improved sample ef-
ficiency and generalization capability, outperforming
heuristic, mathematical optimization, and learning-
based algorithms designed for STPP.
ACKNOWLEDGEMENTS
This work was supported by the National Research
Foundation of Korea(NRF) grant funded by the Korea
government(MSIT) (RS-2024-00410082).
REFERENCES
Cappart, Q., Moisan, T., Rousseau, L.-M., Pr
´
emont-
Schwarz, I., and Cire, A. A. (2021). Combining
reinforcement learning and constraint programming
for combinatorial optimization. In Proceedings of
the AAAI Conference on Artificial Intelligence, vol-
ume 35, pages 3677–3687.
Espeholt, L., Soyer, H., Munos, R., Simonyan, K., Mnih,
V., Ward, T., Doron, Y., Firoiu, V., Harley, T., Dun-
ning, I., Legg, S., and Kavukcuoglu, K. (2018). IM-
PALA: Scalable distributed deep-RL with importance
weighted actor-learner architectures. In Dy, J. and
Krause, A., editors, Proceedings of the 35th Interna-
tional Conference on Machine Learning, volume 80
of Proceedings of Machine Learning Research, pages
1407–1416. PMLR.
Fu, Z.-H., Qiu, K.-B., and Zha, H. (2021). Generalize
a small pre-trained model to arbitrarily large tsp in-
stances. In Proceedings of the AAAI Conference on
Artificial Intelligence, volume 35, pages 7474–7482.
Gasse, M., Ch
´
etelat, D., Ferroni, N., Charlin, L., and Lodi,
A. (2019). Exact combinatorial optimization with
graph convolutional neural networks. Advances in
Neural Information Processing Systems, 32.
Hou, Q., Yang, J., Su, Y., Wang, X., and Deng, Y. (2022).
Generalize learned heuristics to solve large-scale vehi-
cle routing problems in real-time. In The Eleventh In-
ternational Conference on Learning Representations.
Karp, R. M. (1972). Reducibility among combinatorial
problems. In Complexity of computer computations,
pages 85–103. Springer.
Khalil, E., Dai, H., Zhang, Y., Dilkina, B., and Song, L.
(2017). Learning combinatorial optimization algo-
rithms over graphs. In Guyon, I., Luxburg, U. V.,
Bengio, S., Wallach, H., Fergus, R., Vishwanathan,
S., and Garnett, R., editors, Advances in Neural Infor-
mation Processing Systems, volume 30. Curran Asso-
ciates, Inc.
Konda, V. and Tsitsiklis, J. (1999). Actor-critic algorithms.
Advances in neural information processing systems,
12.
Kool, W., van Hoof, H., and Welling, M. (2019). Atten-
tion, learn to solve routing problems! In International
Conference on Learning Representations.
Lee, K., Park, Y., Jeong, H.-S., Yoon, D., Hong, S., Sohn,
S., Kim, M., Ko, H., Lee, M., Lee, H., Kim, K., Kim,
E., Cho, S., Min, J., and Lim, W. (2022). ReSPack: A
large-scale rectilinear steiner tree packing data gener-
ator and benchmark. In NeurIPS 2022 Workshop on
Synthetic Data for Empowering ML Research.
Li, S., Yan, Z., and Wu, C. (2021). Learning to delegate for
large-scale vehicle routing.
Lukes, J. A. (1974). Efficient algorithm for the partitioning
of trees. IBM Journal of Research and Development,
18(3):217–224.
Ma, Y., Hao, X., Hao, J., Lu, J., Liu, X., Xialiang, T., Yuan,
M., Li, Z., Tang, J., and Meng, Z. (2021). A hi-
erarchical reinforcement learning based optimization
framework for large-scale dynamic pickup and deliv-
ery problems. Advances in Neural Information Pro-
cessing Systems, 34:23609–23620.
McMurchie, L. and Ebeling, C. (1995). Pathfinder: A
negotiation-based performance-driven router for fp-
gas. In Proceedings of the 1995 ACM third inter-
national symposium on Field-programmable gate ar-
rays, pages 111–117.
Nowak-Vila, A., Folqu
´
e, D., and Bruna, J. (2018). Divide
and conquer networks.
Perron, L. and Furnon, V. (2022). Or-tools.
Song, J., Lanka, R., Yue, Y., and Dilkina, B. (2020). A gen-
eral large neighborhood search framework for solving
integer linear programs.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L. u., and Polosukhin,
I. (2017). Attention is all you need. In Guyon,
I., Luxburg, U. V., Bengio, S., Wallach, H., Fer-
gus, R., Vishwanathan, S., and Garnett, R., editors,
Advances in Neural Information Processing Systems,
volume 30. Curran Associates, Inc.
Veli
ˇ
ckovi
´
c, P., Cucurull, G., Casanova, A., Romero, A., Li
`
o,
P., and Bengio, Y. (2018). Graph attention networks.
In International Conference on Learning Representa-
tions.
Wang, R., Hua, Z., Liu, G., Zhang, J., Yan, J., Qi, F., Yang,
S., Zhou, J., and Yang, X. (2021). A bi-level frame-
work for learning to solve combinatorial optimization
on graphs. Advances in Neural Information Process-
ing Systems, 34:21453–21466.
Watts, D. J. and Strogatz, S. H. (1998). Collective dynamics
of ”small-world” networks.
Ye, H., Wang, J., Liang, H., Cao, Z., Li, Y., and Li, F.
(2024). Glop: Learning global partition and local
construction for solving large-scale routing problems
in real-time. In Proceedings of the AAAI Conference
on Artificial Intelligence, volume 38, pages 20284–
20292.
Hierarchical Decomposition Framework for Steiner Tree Packing Problem
173

APPENDIX
Combinatorial Optimization as Markov
Decision Process
In this section, we provide a full illustration of a se-
quential optimization process for a general CO prob-
lem. Our goal is to design a corresponding MDP for
equation 3. Intuitively, the sequential decision mak-
ing process in equation 3 can be thought of choosing
for each timestep t an action x
x
x
t
∈ X
t
, until we have
a full solution x
x
x =
∑
t
x
x
x
t
. However, note that we are
constructing X
1
,··· ,X
H
sequentially, i.e., we do not
have the subspace decomposition X = X
1
⊕···⊕X
H
beforehand. Hence, assume we have constructed
X
1
,··· ,X
t
until the current timestep t. Let us define
W
t
the remaining subspace that are yet to be decom-
posed, i.e., X = X
1
⊕···⊕X
t
⊕W
t
. Then, the sequen-
tial decision making is equivalent to choosing for each
timestep t a subspace X
t
≤W
t
and consequently an ac-
tion x
x
x
t
∈X
t
, until we have a trivial subspace W
t
= {0
0
0}.
Sequential decision making process for the bi-
level decomposition in equation 7 and 8 can be formu-
lated similarly. The key is to construct the subspace
decomposition Y = Y
1
⊕···⊕Y
N
sequentially, while
obtaining the partial solution for the original problem
from the low-level sub-problem (8) simultaneously.
MDP Formulation
Below we provide a full description of our MDP for-
mulation for STPP in section 4.2.
State. The state s
t
of the high-level MDP M
hi
con-
sists of a graph G, collection of sets of terminals T , a
partial solution S
t
⊂V (G) constructed until timestep
t, (i.e., the nodes of the disjoint trees that span ter-
minals T
1
,··· ,T
t−1
) and the current timestep t. The
graph G provides general information of the prob-
lem instance, i.e., the connectivity of the graph via
edges. In practice, the graph G can be represented by
the adjacency matrix A ∈ R
|V |×|V|
, where a
i j
takes the
edge weight w
i j
. The information can be further en-
coded via message passing layers of GAT and AT in
GNN. T , S
t
and t provide node features for the cur-
rent timestep, and are essential for generating a graph
embedding. From the state information s
t
, we extract
the node features of the graph for further encoding via
the GNN model. For a node v ∈V , we denote the node
features of the vertex v as x
v
:= (x
o
,x
τ
,x
d
) ∈ Z
3
. The
first node feature x
o
∈ {0, 1} denotes whether a node
v is included in the current partial solution or not. If
v is selected as part of the partial solution, we define
x
o
= 1, otherwise, it is 0. The second node feature
x
τ
∈ {0,1, ··· ,N
type
} indicates the terminal type (i.e.,
x
τ
= k if and only if v ∈T
k
), where the indices are la-
beled in the order that the high-level MDP solves for.
Non-terminal nodes are assigned a value of 0. The
last feature, x
d
, denotes the degree of a node v ∈ V .
The edges of the graph are also assigned with edge
features. We only use the edge weights as the edge
features in this paper. Our choice of node and edge
features is summarized in Table 4, 5.
Action. The action a
t
of a high-level MDP M
hi
at
timestep t is to select a set of vertices y
y
y
t
⊂V (G) \S
t
,
where S
t
is the partial solution constructed until the
previous timesteps. Intuitively, the action a
t
is to se-
lect a node set that includes all terminals of the current
type at timestep t. The selected set of nodes should
create a subgraph G[a
t
] of G generated by the nodes
a
t
, and should correspond to a STP instance (with sin-
gle type of terminals). The low-level agent then com-
putes a minimum weight tree that spans all terminals
of current type from the subgraph G[a
t
]. In practice,
we further assist the agent by designing the MDP en-
vironment for M
hi
in a way such that the terminal
nodes of the current type are automatically selected
by the environment internally. Hence, the action a
t
will result in a subgraph G[a
t
∪V (T
t
)] instead of G[a
t
].
Reward. Designing a reward with an optimality
guarantee is a non-trivial task. In particular, we wish
to construct a reward where all feasible solutions re-
sult in higher reward than those of any infeasible so-
lutions. Also, the feasible solutions with better so-
lution quality (i.e.the objective being closer to op-
timal solution) should be assigned a higher reward.
Hence, given a final solution x
x
x of a CO problem (1),
a reward with an optimality guarantee can be com-
pactly formulated as r(x
x
x) = c ·1
1
1
F
(x
x
x) − f (x
x
x), where
c ≥ sup
x
x
x∈X
f (x
x
x), f is the objective function of prob-
lem (1), and 1
1
1
F
(·) is an indicator function. Note that
this form of the reward is equivalent to what is de-
scribed in Section 3.1. Achieving the maximal return
will result in the same optimal policy
5
. Finally, recall
that our objective f is linear in X . For each partial
solution x
x
x
t
constructed at timestep t, we are able to
decompose our reward function as follows.
r(x
x
x
t
) = c ·1
1
1
F
t
∑
k=1
x
x
x
k
!
− f (x
x
x
t
) (11)
Transition. Our transition in MDP is deterministic;
the change in the partial solution alters a node feature
5
Providing incentives for x
x
x ∈ F instead of a penalty
when x
x
x /∈ F scales all rewards to be non-negative.
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
174

Table 4: Node features.
Notation Value Description
x
o
∈ {0,1} Is partial solution
x
τ
∈ {0,1, 2,...,N
type
} Terminal type
x
d
∈ Z Node degree
Table 5: Edge feature.
Notation Value Description
w
e
∈ R Edge weight(=cost)
x
o
from 0 into 1, which results in different node and
graph embeddings from GNN.
Termination. Our STPP environment is terminated
when it is not able to generate a feasible STPP solu-
tion or when a feasible solution is found. The cases
where generating a feasible STPP solution includes
(1) no possible actions remaining, (2) any choice of
actions in future timestep inevitably results in an in-
feasible solution, or (3) the choice of action a
t
in a
high-level MDP M
hi
results in an unsolvable STP in-
stance G[a
t
].
GNN Architecture
Encoder. Given a graph G, we first extract a D-
dimensional node embedding µ
µ
µ
v
for each node v ∈
V , where D denotes the number of features, as pro-
vided in Section 6. Note that we use D = 3, with
x
v
= (x
o
,x
τ
,x
d
) representing the features as described
in Table 4. Let ρ : R
D
→ R
D·p
be a fixed vector-
ization mapping of a given node feature x
v
, and let
θ
0
: R
D·p
→ R
p
be a linear mapping. We obtain the
initial node embedding µ
µ
µ
v
as follows.
µ
µ
µ
v
= ReLU(θ
0
(ρ(x
v
))). (12)
Next, we encode the node embeddings M :=
(µ
µ
µ
1
,··· ,µ
µ
µ
|V |
) ∈ R
|V |×p
via graph attention network
(GAT) and attention network (AT). Formally, let Θ
i
:
R
n
h
×p
→R
2p
and θ
i
: R
2p
→R
p
for i = 1, ···, l be lin-
ear mappings, where n
h
denotes the number of heads
of GAT. For convenience, we slightly overload the no-
tation, writing Θ
i
(M) := (Θ
i
(µ
µ
µ
1
),··· ,Θ
i
(µ
µ
µ
|V |
)), and
use a similar notation for θ
i
. We recursively encode
the node embedding as follows
M
(i−1)′
= AT(Θ
i
(GAT(M
(i−1)
;G)); G) (13)
M
(i)
= θ
i
(ReLU(M
(i−1)
||M
(i−1)′
)) (14)
for each i = 1,··· , l. Here, we define M
(0)
≡ M,
and write (·||·) for CONCATENATE(·,·). We denote
our graph encoder function Enc succinctly as follows,
omitting some details for brevity.
Enc(·;G) :=
l times
z }| {
(AT ◦GAT) ◦···◦(AT ◦GAT)(·;G)
(15)
Graph Embedding, Logit, and Probability.
Given the node embedding of the last layer M
(l)
, we
obtain the embedding for the entire graph µ
µ
µ
G
. Instead
of simply averaging over all the nodes, we enrich the
graph embedding by grouping the nodes into three
subsets based on their characteristics: current termi-
nal T
t
, partial solution S
t
, and non-terminal nodes
V := V \
S
T ∈T
T . Then, the embeddings are averaged
within each subset, concatenated, and projected to
obtain the graph embedding µ
µ
µ
G
. Formally, the graph
embedding layer Emb is written as follows.
Emb(·;t) := Ψ(·,T
t
)||Ψ(·,S
t
)||Ψ(·,V ) (16)
where Ψ(M
(l)
,A) performs the average pooling
over the set of node embeddings that belong to
A. The graph embedding µ
µ
µ
G
is obtained as µ
µ
µ
G
=
Emb(M
(l)
;t). Finally, the logit value, which is used
to compute the probability of choosing the node for
each node v ∈V is computed as follows.
logit
v
= w
4
(w
3
(ReLU(w
1
(µ
µ
µ
G
)||w
2
(µ
µ
µ
(l)
v
))) + µ
µ
µ
(0)
v
) ∀v ∈V
(17)
p
v
= softmax(logit
v
) ∀v ∈V (18)
where w
1
: R
3p
→R
p
, w
2
: R
p
→R
p
, w
3
: R
2p
→R
p
,
and w
4
: R
p
→ R
2
are linear functions.
Value Function. The value function V
π
θ
uses a
model that has a similar GNN architecture with a
simple multi layer perceptron MLP that sequentially
projects (R
3p
→R
3p
→R
p
→R
1
), and does not share
weights with the policy network.
V
π
θ
(s
t
) = MLP(Emb(Enc(M;G);t)). (19)
Hyperparameters
We set the hyperparameters based on the performance
of Flat and considered the following hyperparameter
ranges for the 40-node experiment:
• p = {32, 64, 128, 256}
• l = {3, 4, 5}
• number of heads = {4, 8}
• IL learning rate = {1e-3, 1e-4, 1e-5, 1e-6}
• weight decay = {1e-6, 5e-7}
Hierarchical Decomposition Framework for Steiner Tree Packing Problem
175

• RL learning rate = {1e-3, 1e-4, 1e-5, 1e-6}
• entropy coefficient = {1, 1e-1, 1e-2}
• value loss coefficient = {1e-1, 1, 3, 5}
Thirty hyperparameter combinations were randomly
selected from the given ranges, and the combination
that performed best on the validation set was used.
This parameter combination was consistently used for
all methods. The GNN model uses a hidden dimen-
sion of p = 128 and l = 5 for both GAT and AT en-
coder layers. Both GAT and AT use 8 heads, with
a dropout rate of 0.5 in IL, but dropout is not used
in RL training. A batch size of 64 is used, and the
learning rate is initialized to 10
−4
, decreasing by 0.99
per epoch. A fine-tuned value of 5 ×10
−7
is used for
weight decay. To prevent divergence in learning, the
gradient norm is clipped to 1. HCO trains for 100
epochs, using 1 epoch to update the model with BC
data at every step and in every episode. In the RL
phase, a batch size of 30, a learning rate of 10
−6
, a
discount factor of 0.99, an entropy coefficient of 0.01,
and a value function loss coefficient of 5 are used. The
number of workers used in IMPALA is set to 30.
Training and Evaluation
For imitation learning, we first collect the demon-
stration data using the optimal solver, MILP, as ex-
pert policy. The expert policy π
expert
is defined as
π
expert
(a
t
|·) = 1 if a
t
∈ A
∗
t
and π
expert
(a
t
|·) = 0 other-
wise. The nodes that are not selected by the expert are
excluded from the loss calculation. HCO uses cross-
entropy loss for BC training, and one epoch is defined
as updating HCO for every step of every instance.
During the evaluation phase, the softmax function is
applied to the logit values of each node to obtain prob-
abilities, and nodes with probability values exceed-
ing 0.5 are selected as high-level actions. The train-
ing and evaluation are carried out on a single GPU,
comprising an AMD EPYC 7R32 CPU and NVIDIA
A10G GPU.
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
176
