
Leveraging Unreal Engine for UAV Object Tracking:
The AirTrackSynth Synthetic Dataset
Mingyang Zhang
a
, Kristof Van Beeck
b
and Toon Goedem
´
e
c
PSI-EAVISE Research Group, Department of Electrical Engineering, KU Leuven, Belgium
{mingyang.zhang, kristof.vanbeeck, toon.goedeme}@kuleuven.be
Keywords:
Synthetic Data, UAV, Object Tracking, Multimodality, Deep Learning, Siamese Network.
Abstract:
Nowadays, synthetic datasets are often used to advance the state-of-the-art in many application domains of
computer vision. For these tasks, deep learning approaches are used which require vasts amounts of data. Ac-
quiring these large annotated datasets is far from trivial, since it is very time-consuming, expensive and prone
to errors during the labelling process. These synthetic datasets aim to offer solutions to the aforementioned
problems. In this paper, we introduce our AirTrackSynth dataset, developed to train and evaluate deep learn-
ing models for UAV object tracking. This dataset, created using the Unreal Engine and AirSim, comprises
300GB of data in 200 well-structured video sequences. AirTrackSynth is notable for its extensive variety of
objects and complex environments, setting a new standard in the field. This dataset is characterized by its
multi-modal sensor data, accurate ground truth labels and a variety of environmental conditions, including
distinct weather patterns, lighting conditions, and challenging viewpoints, thereby offering a rich platform to
train robust object tracking models. Through the evaluation of the SiamFC object tracking algorithm on Air-
TrackSynth, we demonstrate the dataset’s ability to present substantial challenges to existing methodologies
and notably highlight the importance of synthetic data, especially when the availability of real data is limited.
This enhancement in algorithmic performance under diverse and complex conditions underscores the critical
role of synthetic data in developing advanced tracking technologies.
1 INTRODUCTION
Object tracking in computer vision, crucial for ap-
plications such as traffic monitoring, medical imag-
ing, and autonomous vehicle tracking, is particularly
significant in the context of unmanned aerial vehi-
cles (UAVs). This task involves identifying and pre-
dicting the movements and characteristics of objects
within video sequences, presenting unique challenges
in real-world scenarios (Du et al., 2018). The pursuit
of real-world data is complicated by privacy concerns,
copyright infringement issues, and limitations of re-
lying solely on RGB data, which can be affected by
environmental factors like lighting and object trans-
formations (Bhatt et al., 2021). Additionally, datasets
need labeling, a process that is time-consuming and
prone to errors. To overcome these obstacles and
enhance deep-learning-based object-tracking models,
we propose the construction of a synthetic dataset
using a novel combination of the Unreal Engine 4
a
https://orcid.org/0000-0002-8530-6257
b
https://orcid.org/0000-0002-3667-7406
c
https://orcid.org/0000-0002-7477-8961
(UE4), Unreal Engine 5 (UE5), and the AirSim plu-
gin (Shah et al., 2018).
The trajectory of object tracking algorithms has
evolved significantly from traditional methods to so-
phisticated deep-learning approaches. Early tech-
niques like Mean-shift (Zhou et al., 2009; Hu et al.,
2008) and Kalman Filter (Weng et al., 2006; Patel and
Thakore, 2013) methods laid the groundwork but en-
countered limitations with complex dynamics and oc-
clusions (Yilmaz et al., 2006). The integration of deep
learning transformed object tracking, with Convolu-
tional Neural Networks (CNNs) substantially increas-
ing accuracy and resilience (Nam and Han, 2016).
Siamese networks have particularly excelled, with
SiamFC (Bertinetto et al., 2016) pioneering a robust
offline trained similarity metric. Subsequent innova-
tions like SiamRPN (Li et al., 2018), SiamRPN++ (Li
et al., 2019), and SiamMask (Wang et al., 2019b)
enhanced adaptability to scale changes and segmen-
tation capabilities. Recent transformer-based mod-
els like STARK (Yan et al., 2021) and TransT (Chen
et al., 2021) represent cutting-edge tracking technol-
ogy, leveraging advanced feature extraction and con-
Zhang, M., Van Beeck, K. and Goedemé, T.
Leveraging Unreal Engine for UAV Object Tracking: The AirTrackSynth Synthetic Dataset.
DOI: 10.5220/0013319400003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
743-750
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
743

text comprehension.
The development of object tracking algorithms
has been supported by robust datasets. Notable
examples include OTB2015 (Wu et al., 2015),
VOT2018 (Kristan et al., 2018), GOT-10k (Huang
et al., 2021), DTB70 (Li and Yeung, 2017),
NfS (Danelljan et al., 2017), and LaSOT (Fan et al.,
2019). Gaming engines have emerged as powerful
tools for synthetic data generation, addressing real-
world data acquisition challenges. The AM3D-Sim
dataset (Hu et al., 2023) introduced dual-view detec-
tion for aerial monocular object detection, while Un-
realCV (Qiu et al., 2017) and UnrealRox (Martinez-
Gonzalez et al., 2020) developed frameworks for
computer vision research and robotics simulations.
Synthetic data from games like GTA5 (Wang et al.,
2019a; Wang et al., 2021; Fabbri et al., 2021) has
proven valuable in replacing real-world datasets while
avoiding privacy issues.
While previous datasets cater to broader applica-
tions, our AirTrackSynth dataset focuses specifically
on UAV object tracking challenges. Our proposed
dataset, with 300GB of data across 200 video se-
quences, is notable for its extensive variety of objects
and complex environments. It features multi-modal
sensor data, accurate ground truth labels, and diverse
environmental conditions, including distinct weather
patterns, lighting conditions, and challenging view-
points. Through evaluation using the SiamFC algo-
rithm, we demonstrate the dataset’s ability to present
substantial challenges to existing methodologies and
highlight the importance of synthetic data when real
data availability is limited.
In this work, we address the necessity of such a
dataset for UAV object tracking, where maintaining
object view under challenging conditions is crucial.
This paper details the methods for generating the Air-
TrackSynth dataset, compares its characteristics with
existing datasets, and presents results of training and
evaluating object trackers, demonstrating the efficacy
of synthetic datasets in advancing real-world object
tracking algorithms.
2 SYNTHETIC DATA
GENERATION AND
METHODOLOGY
Our research utilizes an integrated toolchain centered
on Unreal Engine and AirSim for generating synthetic
data, coupled with a sophisticated methodology for
ensuring data diversity and quality. This section de-
tails our technical approach to data generation and the
strategies employed for creating realistic tracking sce-
narios.
2.1 Core Tools and Implementation
The foundation of our data generation pipeline com-
bines Unreal Engine’s advanced rendering capabili-
ties with AirSim’s drone simulation features. We uti-
lize both UE4 and UE5, leveraging UE5’s Lumen
global illumination and Nanite geometry system for
enhanced realism. Our environments incorporate as-
sets from the Epic Marketplace, including CityPark,
CitySample, and DowntownWest, while Mixamo pro-
vides character animations for dynamic scenes.
To ensure compatibility between UE5 and Air-
Sim, we modified AirSim’s source code to address
conflicts with UE5’s dynamic characters and lighting
effects. This integration enables us to capture com-
plex aerial scenarios while maintaining visual fidelity
and physical accuracy.
2.2 Flight Control Strategy
Our implementation focuses on precise UAV control
through velocity and acceleration adjustments, em-
ploying three key components:
• Discrete LQR Control: Implements precise
flight adjustments using:
u(t) = −K(x(t)− x
re f
) (1)
where u(t) represents control input, x(t) current
state, x
re f
reference state, and K the gain matrix.
• Acceleration Control: Manages horizontal ac-
celeration through attitude angles:
Θ
h
= −g
−1
A
−1
ψ
a (2)
with Θ
h
as desired attitude angles and a as desired
acceleration.
• Dynamic Camera Adjustment: Maintains ob-
ject centering using:
θ
cam
= tan
−1
y
ob j
− y
cam
x
ob j
− x
cam
(3)
2.3 Data Diversity Enhancement
We employ two primary strategies to ensure dataset
diversity:
UAV Manipulation:
• Multiple camera positions (top, bottom, left, right,
front, rear)
• Varied flight altitudes and distances
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
744

• Complex motion patterns including circling, as-
cending, and linear movements
Environment Manipulation:
• Dynamic lighting conditions through time-of-day
adjustments
• Six distinct weather conditions (clear, rain, snow,
sandstorm, autumn, fog)
• Diverse object types including humans, vehicles,
and animals
This integrated approach enables the generation
of rich, varied datasets that closely mirror real-world
scenarios while maintaining control over environmen-
tal conditions and tracking parameters.
3 DATASET CHARACTERISTICS
Our AirTrackSynth dataset comprises 300GB of data
across 200 video sequences, enriched with ground
truth labels. Featuring a broad spectrum of data
modalities, environments, objects, and scenarios, this
dataset aims to create a new benchmark for object
tracking research.
3.1 Data Multimodality
Beyond traditional RGB footage, AirTrackSynth ex-
tends into depth maps, infrared maps, segmentation
maps, IMU values, and UAV statuses. This multi-
modal data approach is critical for developing sophis-
ticated algorithms capable of navigating the complex-
ities of real-life environments. Figure 1 exemplifies
the multimodal data presented in our dataset.
3.2 Challenges in Object Tracking
Our AirTrackSynth dataset simulates a variety of
complex scenarios to challenge the state-of-the-art in
UAV-based object tracking. Drawing upon the diverse
UAV manipulations and virtual environment adjust-
ments outlined, it provides a rich testing ground that
closely mirrors the unpredictability and dynamism in-
herent to real-world tracking tasks.
Firstly, the dataset introduces intricately designed
challenges, testing algorithms against complex UAV
flight patterns that emulate real operational condi-
tions. These include varying altitudes, angles and
motion dynamics that necessitate advanced adapt-
ability and precision in tracking algorithms. Such
UAV manipulation strategies ensure that algorithms
can maintain robust performance despite the unpre-
dictable movements of both UAVs and their targets,
thereby pushing the envelope of current tracking ca-
pabilities.
Secondly, our AirTrackSynth offers an immersive
simulation environment for tracking algorithms, pre-
senting a wide array of real-world challenges accu-
rately represented within virtual contexts. These chal-
lenges include different weather conditions, drastic
appearance changes of the tracked object, partial and
complete occlusion, presence of distractors and illu-
mination changes.
Illustrated in Figure 2, the dataset showcases a
variety of weather conditions—ranging from dusty
and foggy atmospheres to autumn scenes with falling
leaves, rainy environments with puddles, snowy land-
scapes, and bright sunny days. These weather scenar-
ios are designed to test the resilience of tracking al-
gorithms under diverse atmospheric conditions, each
affecting visibility and object appearance in unique
ways.
Further complicating the tracking task, Figure 3a
and Figure 3b depict a scenario where the appearance
of the object changes dramatically between succes-
sive frames. Figure 3c, Figure 3d, Figure 3e and Fig-
ure 3f highlight the case of partial or complete oc-
clusion, where a man is obscured by elements within
the environment, challenging algorithms to maintain
track of the subject despite significant visual obstruc-
tions. Additionally, in Figure 3g, Figure 3h and Fig-
ure 3i, the presence of distractors alongside drastic
illumination changes across frames introduces a sce-
nario where false localizations of the tracked object
are highly probable, underscoring the importance of
developing algorithms capable of distinguishing the
target from misleading cues in the environment.
By presenting these multifaceted challenges, the
AirTrackSynth dataset serves as a crucial tool for ad-
vancing object tracking research. It not only bench-
marks the resilience of existing technologies but also
inspires the development of innovative solutions ca-
pable of overcoming the complexities of tracking in
dynamic, real-world environments. The inclusion of
detailed environmental manipulations and UAV flight
dynamics ensures that AirTrackSynth reflects a wide
range of scenarios that algorithms must be prepared
to handle.
4 EVALUATION OF THE
DATASET
In this section we present a detailed evaluation of
our AirTrackSynth dataset, using the SiamFC algo-
rithm (Bertinetto et al., 2016). Our analysis spans
across multiple benchmarks, each presenting unique
Leveraging Unreal Engine for UAV Object Tracking: The AirTrackSynth Synthetic Dataset
745
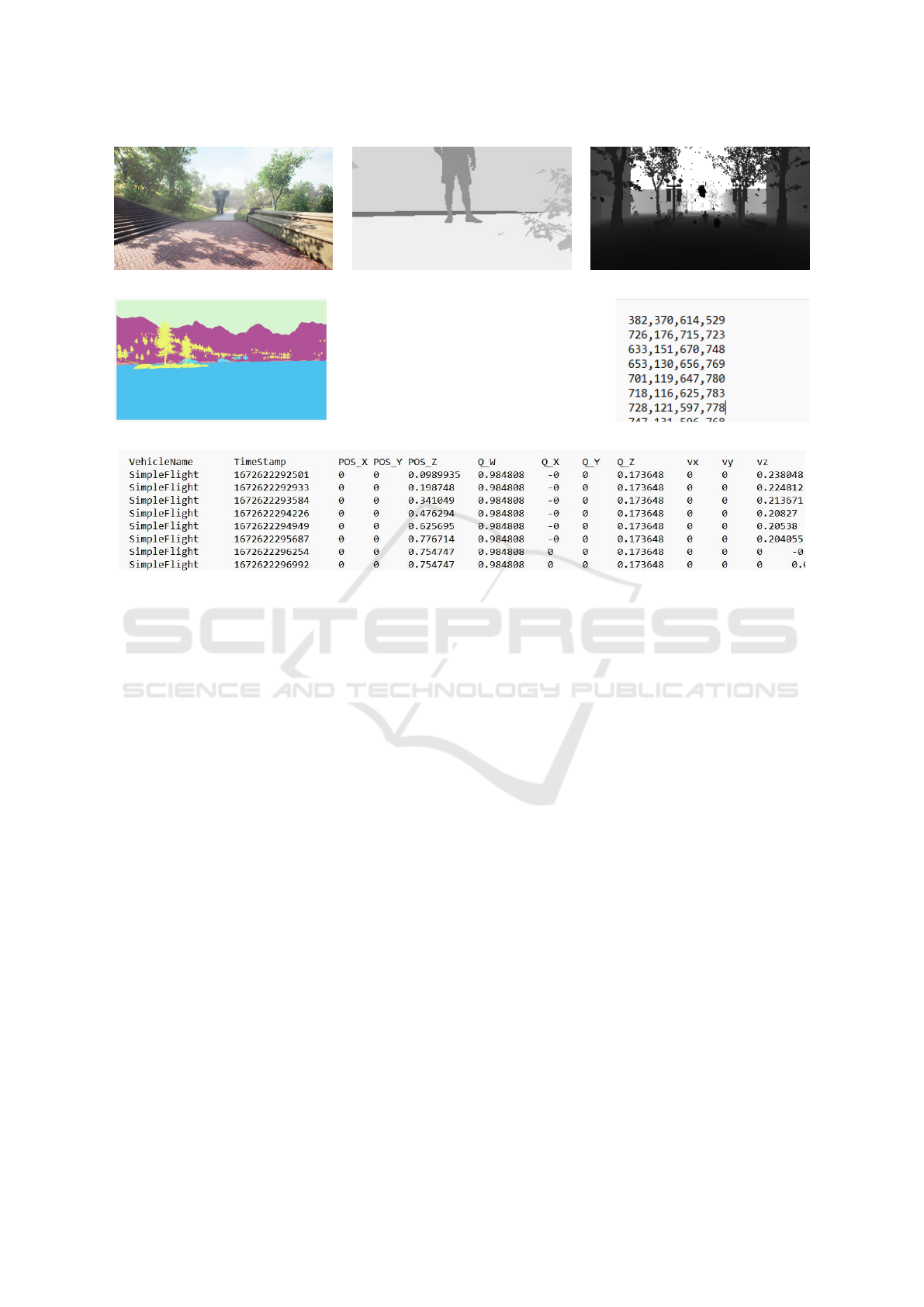
(a) RGB (b) Depth (c) Normalized Disparity
(d) Segmentation (e) Object Bounding Box
(f) Sensor Data
Figure 1: Example of Multimodal Data from Our Dataset.
challenges to object tracking algorithms, to ascertain
the dataset’s efficacy in enhancing tracking perfor-
mance, especially under constraints of limited real-
world data availability.
4.1 Object Tracker Used for Evaluation
To evaluate the effectiveness of the AirTrackSynth
dataset comprehensively, we selected the SiamFC al-
gorithm, a pioneering object tracking model known
for its innovative use of Siamese networks. This
choice was motivated by SiamFC’s status as a semi-
nal work in the application of Siamese networks to vi-
sual object tracking, making it an excellent represen-
tative for Siamese-based tracking methods. Despite
being a relatively early model, SiamFC demonstrates
robust performance in visual tracking tasks compared
to many conventional methods, establishing it as a rel-
evant benchmark in the object tracking domain.
A key advantage of SiamFC lies in its real-time
capability, which is crucial for applications such as
autonomous UAV drones where quick processing is
essential. The model’s architecture is designed for
efficiency, allowing it to operate in real-time scenar-
ios. This efficiency is further complemented by the
simplicity of SiamFC’s design, making it easier to
train and implement, especially on embedded hard-
ware. Such simplicity contrasts with more complex
transformer-based models, which, while potentially
more accurate, may be less suitable for resource-
constrained environments.
4.2 Benchmark Datasets and Metrics
We evaluated our dataset using several estab-
lished benchmarks: DTB70 (Li and Yeung, 2017)
(70 sequences focusing on small object tracking),
OTB2015 (Wu et al., 2015) (100 sequences with var-
ied scenarios), VOT2018 (Kristan et al., 2018) (chal-
lenging tracking sequences), NfS (240 FPS) (Danell-
jan et al., 2017) (high-speed tracking), LaSOT (Fan
and Ling, 2019) (1400 videos across 70 categories),
and GOT-10k (Huang et al., 2019) (over 10,000 video
clips).
For evaluation metrics, we used Success Score and
Precision Score for OTB2015, DTB70, LaSOT, and
NfS datasets, measuring overlap rate and center point
accuracy respectively. VOT2018 was evaluated us-
ing Accuracy (spatial precision) and Robustness (fail-
ure rate) metrics. For GOT-10k, we employed Aver-
age Overlap (AO) and Success Rates at thresholds 0.5
and 0.75 (SR0.5, SR0.75). The metrics used for each
dataset are commonly used in the literature.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
746

(a) Dusty (b) Foggy (c) Autumn
(d) Rainy (e) Snowy (f) Sunny
Figure 2: Examples of frames with different weather conditions introduced in the AirTrackSynth dataset.
4.3 Experiment Setup
We evaluated the impact of combining synthetic and
real data using the GOT-10k dataset as baseline. Our
experiments used training sets with varying ratios of
real-to-synthetic data, progressively increasing real
video sequences from 0 to 500 while maintaining con-
sistent synthetic data. A control group using only real
data was maintained for comparison.
The experiments were conducted using an
NVIDIA RTX 3060 Ti GPU with Intel i7-12700K
CPU and 64GB RAM. The SiamFC model was
trained with an initial learning rate of 0.01, batch size
of 32, and 50 epochs, following the original imple-
mentation’s optimization parameters.
4.4 Results and Analysis
This section presents and analyzes the test results of
the SiamFC model trained with various combinations
of synthetic and real data across multiple datasets. We
evaluate the impact of combining synthetic data with
real data on tracking performance, comparing it to
training with real data alone.
Table 1 presents a comprehensive overview of
the SiamFC model’s performance across six diverse
datasets, comparing various combinations of real and
synthetic training data. The results demonstrate the
impact of synthetic data on the model’s tracking ca-
pabilities across different scenarios and metrics.
For GOT-10k, the integration of synthetic data sig-
nificantly improves the model’s performance, espe-
cially when real data is limited. The results show
large performance gains when combining synthetic
data with small amounts of real data, demonstrating
the substantial benefit of synthetic data in training ro-
bust models.
LaSOT, known for its challenging large-scale and
long-term tracking conditions, shows the effective-
ness of synthetic data augmentation. The mixed train-
ing approach (real + synthetic) outperforms the real-
data-only setups across almost all metrics, indicating
improved performance in complex tracking scenarios.
The NfS dataset, characterized by high-speed ob-
ject tracking, reveals significant improvements with
the inclusion of synthetic data. This is particularly
evident in setups where the amount of real data is lim-
ited, underscoring synthetic data’s utility in preparing
the model for challenging high-speed tracking scenar-
ios.
On the DTB70 dataset, we observe a clear im-
provement when combining synthetic data with real
data. All Real + Synthetic data configurations out-
perform their real-data-only counterparts, highlight-
ing the synthetic data’s role in enhancing the model’s
generalization capabilities.
For OTB2015, training with synthetic data yields
significant improvements in both precision and suc-
cess rates. The enhancements are more pronounced
when using only 1 or 8 real videos, highlighting syn-
thetic data’s critical role in boosting tracking accuracy
and success, especially when real data is scarce.
In the context of VOT2018, a dataset renowned for
its demanding tracking tasks, the addition of synthetic
data alongside real data significantly enhances the ro-
bustness of the SiamFC tracker. This improvement in
robustness is crucial for applications like autonomous
driving and surveillance, where the ability to handle
unpredictable elements is essential.
Overall, this comprehensive analysis across mul-
tiple datasets reveals a consistent trend: incorporating
Leveraging Unreal Engine for UAV Object Tracking: The AirTrackSynth Synthetic Dataset
747

(a) Appearance change (T = t) (b) Appearance change (T = t +1) (c) Occlusion (T = t)
(d) Occlusion (T = t +1) (e) Occlusion (T = t +2) (f) Occlusion (T = t +3)
(g) Distractor and illumination change
(T = t)
(h) Distractor and illumination change
(T = t +1)
(i) Distractor and illumination change
(T = t +2)
Figure 3: Challenging scenarios in object tracking within the AirTrackSynth dataset.
synthetic data with real data significantly enhances
the performance of the SiamFC model, particularly in
settings where real data is limited. The improvement
is evident across various tracking challenges, from
high-speed scenarios to long-term, large-scale track-
ing. The enhancement in performance metrics such as
accuracy, precision, success rate, and robustness un-
derscores the value of synthetic data in providing a
diverse range of scenarios that real data alone might
not capture.
The consistent improvement in robustness ob-
served in the VOT2018 dataset is particularly notable,
demonstrating the synthetic data’s role in preparing
the model for complex tracking environments. This
finding is crucial for applications where robustness is
critical, such as autonomous driving and surveillance,
where unpredictable elements are present.
5 CONCLUSIONS
In this work, we introduced a novel synthetic dataset
created using the Unreal Engine and the AirSim sim-
ulator, designed to address the complex needs of the
object tracking task in computer vision. Our dataset
stands out by offering multi-modal data, encompass-
ing a variety of weather and lighting conditions, and
specifically addressing challenging scenarios that are
critical for advancing object tracking algorithms.
The synthetic dataset’s diversity and richness in
scenarios—from varying weather conditions to in-
tricate lighting dynamics—provide a comprehensive
testing and training ground for developing robust ob-
ject tracking algorithms. Moreover, the inclusion of
hard scenarios, such as rapid object motion, occlu-
sions, and illumination changes, ensures that models
trained on this dataset are well-equipped to handle
real-world complexities.
Through experimental validation, we have demon-
strated the significant value of integrating synthetic
data with real-world data, particularly in contexts
where real data is scarce or limited in diversity. Our
results, obtained across several benchmarks, includ-
ing DTB70, GOT-10k, LaSOT, NfS, OTB2015 and
VOT2018, clearly show that models trained on a com-
bination of real and synthetic data exhibit superior
performance in terms of accuracy, precision, success
rates and robustness compared to models trained ex-
clusively on real data.
The findings from our study underscore the syn-
thetic data’s crucial role in enhancing the generaliza-
tion capabilities of object tracking models. This work
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
748
Table 1: Comprehensive Results of SiamFC Model Across Multiple Datasets.
Dataset GOT-10k LaSOT NfS DTB70 OTB2015 VOT2018
AO / SR0.50
/ SR0.75
Success /
Precision
Success /
Precision
Success /
Accuracy
Success /
Precision
Accuracy /
Robustness
Real 1 0.167 /
0.127 /
0.023
0.1051 /
0.0646
0.107 /
0.120
0.143 /
0.213
0.131 /
0.140
0.3249 /
311.4349
Real 8 0.445 /
0.472 /
0.240
0.2484 /
0.2270
0.356 /
0.417
0.326 /
0.480
0.437 /
0.559
0.4560 /
85.3599
Real 50 0.455 /
0.483 /
0.227
0.2449 /
0.2164
0.371 /
0.455
0.343 /
0.441
0.447 /
0.589
0.4546 /
70.0071
Real 500 0.458 /
0.510 /
0.239
0.2518 /
0.2337
0.413 /
0.489
0.383 /
0.585
0.468 /
0.626
0.4499 /
71.0992
Real 1 + Full
Synthetic
0.426 /
0.449 /
0.199
0.2090 /
0.1930
0.288 /
0.359
0.347 /
0.536
0.399 /
0.535
0.4593 /
85.1166
Real 8 + Full
Synthetic
0.455 /
0.492 /
0.230
0.2649 /
0.2444
0.395 /
0.473
0.393 /
0.594
0.452 /
0.600
0.4707 /
75.2022
Real 50 +
Full
Synthetic
0.428 /
0.453 /
0.195
0.2395 /
0.2172
0.345 /
0.425
0.366 /
0.548
0.451 /
0.603
0.4557 /
72.0395
Real 500 +
Full
Synthetic
0.489 /
0.544 /
0.239
0.2555 /
0.2406
0.399 /
0.479
0.403 /
0.637
0.469 /
0.648
0.4479 /
65.0460
not only validates the effectiveness of our synthetic
dataset but also highlights the potential of synthetic
data to complement and augment real data, pushing
the boundaries of what is achievable in object track-
ing research.
Building on the solid foundation laid by this re-
search, future work will pivot towards harnessing the
full potential of multimodal data present in our syn-
thetic dataset.
The primary focus will be on developing and fine-
tuning models capable of effectively fusing multi-
modal data to achieve a more comprehensive under-
standing of the tracking environments. Furthermore,
to thoroughly validate the versatility and robustness of
our synthetic dataset, it is required to test its efficacy
across a broader spectrum of tracking algorithms. By
expanding the array of tested tracking models, includ-
ing those leveraging advanced neural architectures,
we aim to establish our synthetic dataset as a bench-
mark for future developments in object tracking.
ACKNOWLEDGEMENTS
This project has been partially funded my the VLAIO
Tetra Project AI To The Source and the Flanders AI
Research Program.
REFERENCES
Bertinetto, L., Valmadre, J., Henriques, J. F., Vedaldi, A.,
and Torr, P. H. (2016). Fully-convolutional siamese
networks for object tracking. In European conference
on computer vision, pages 850–865. Springer.
Bhatt, D., Patel, C., Talsania, H. N., Patel, J., Vaghela, R.,
Pandya, S., Modi, K. J., and Ghayvat, H. (2021). Cnn
variants for computer vision: History, architecture,
application, challenges and future scope. Electronics,
10(20).
Chen, X., Yan, B., Zhu, J., Wang, D., Yang, X., and Lu, H.
(2021). Transformer tracking. In Proceedings of the
Leveraging Unreal Engine for UAV Object Tracking: The AirTrackSynth Synthetic Dataset
749

IEEE/CVF conference on computer vision and pattern
recognition, pages 8126–8135.
Danelljan, M., Bhat, G., Shahbaz Khan, F., and Felsberg,
M. (2017). The need for speed: A benchmark for
visual object tracking. In Proceedings of the IEEE
International Conference on Computer Vision, pages
1125–1134.
Du, D., Qi, Y., Yu, H., Yang, Y.-F., Duan, K., Li, G., Zhang,
W., Huang, Q., and Tian, Q. (2018). The unmanned
aerial vehicle benchmark: Object detection and track-
ing. In European Conference on Computer Vision
(ECCV).
Fabbri, M., Bras
´
o, G., Maugeri, G., Cetintas, O., Gas-
parini, R., O
ˇ
sep, A., Calderara, S., Leal-Taix
´
e, L., and
Cucchiara, R. (2021). Motsynth: How can synthetic
data help pedestrian detection and tracking? In 2021
IEEE/CVF International Conference on Computer Vi-
sion (ICCV), pages 10829–10839.
Fan, H., Lin, L., Yang, F., Chu, P., Deng, G., Yu, S., Bai,
H., Xu, Y., Liao, C., and Ling, H. (2019). Lasot: A
high-quality benchmark for large-scale single object
tracking. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR).
Fan, H. and Ling, H. (2019). Lasot: A high-quality bench-
mark for large-scale single object tracking. Proceed-
ings of the IEEE Conference on Computer Vision and
Pattern Recognition, pages 5374–5383.
Hu, J.-S., Juan, C.-W., and Wang, J.-J. (2008). A spatial-
color mean-shift object tracking algorithm with scale
and orientation estimation. Pattern Recognition Let-
ters, 29(16):2165–2173.
Hu, Y., Fang, S., Xie, W., and Chen, S. (2023). Aerial
monocular 3d object detection. IEEE Robotics and
Automation Letters, 8(4):1959–1966.
Huang, L., Zhao, X., and Huang, K. (2019). Got-
10k: A large high-diversity benchmark for generic
object tracking in the wild. arXiv preprint
arXiv:1810.11981.
Huang, L., Zhao, X., and Huang, K. (2021). GOT-10k:
a large high-diversity benchmark for generic object
tracking in the wild. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 43(5):1562–1577.
Kristan, M., Leonardis, A., Matas, J., Felsberg, M.,
Pflugfelder, R., Cehovin Zajc, L., Vojir, T., Hager, G.,
Lukezic, A., Eldesokey, A., et al. (2018). The sixth
visual object tracking vot2018 challenge results. In
European Conference on Computer Vision, pages 0–
0.
Li, B., Wu, W., Wang, Q., Zhang, F., Xing, J., and Yan,
J. (2019). SiamRPN++: Evolution of Siamese visual
tracking with very deep networks. In the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 4282–4291.
Li, B., Yan, J., Wu, W., Zhu, Z., and Hu, X. (2018). High
performance visual tracking with Siamese region pro-
posal network. In the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
8971–8980.
Li, S. and Yeung, D.-Y. (2017). Visual object tracking for
unmanned aerial vehicles: A benchmark and new mo-
tion models. Proceedings of the AAAI Conference on
Artificial Intelligence, 31(1).
Martinez-Gonzalez, P., Oprea, S., Garcia-Garcia, A.,
Jover-Alvarez, A., Orts-Escolano, S., and Garcia-
Rodriguez, J. (2020). Unrealrox: an extremely photo-
realistic virtual reality environment for robotics simu-
lations and synthetic data generation. Virtual Reality,
24:271–288.
Nam, H. and Han, B. (2016). Learning multi-domain con-
volutional neural networks for visual tracking. Pro-
ceedings of the IEEE conference on computer vision
and pattern recognition, pages 4293–4302.
Patel, H. A. and Thakore, D. G. (2013). Moving object
tracking using kalman filter. International Journal of
Computer Science and Mobile Computing, 2(4):326–
332.
Qiu, W., Zhong, F., Zhang, Y., Qiao, S., Xiao, Z., Kim,
T. S., and Wang, Y. (2017). Unrealcv: Virtual worlds
for computer vision. In Proceedings of the 25th ACM
International Conference on Multimedia, MM ’17,
page 1221–1224, New York, NY, USA. Association
for Computing Machinery.
Shah, S., Dey, D., Lovett, C., and Kapoor, A. (2018). Air-
sim: High-fidelity visual and physical simulation for
autonomous vehicles. In Hutter, M. and Siegwart, R.,
editors, Field and Service Robotics, pages 621–635,
Cham. Springer International Publishing.
Wang, Q., Gao, J., Lin, W., and Yuan, Y. (2019a). Learning
from synthetic data for crowd counting in the wild. In
2019 IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), pages 8190–8199.
Wang, Q., Gao, J., Lin, W., and Yuan, Y. (2021). Pixel-wise
crowd understanding via synthetic data. International
Journal of Computer Vision, 129(1):225–245.
Wang, Q., Zhang, L., Bertinetto, L., Hu, W., and Torr,
P. H. (2019b). Fast online object tracking and seg-
mentation: a unifying approach. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), pages 1328–1338.
Weng, S.-K., Kuo, C.-M., and Tu, S.-K. (2006). Video
object tracking using adaptive kalman filter. Journal
of Visual Communication and Image Representation,
17(6):1190–1208.
Wu, Y., Lim, J., and Yang, M.-H. (2015). Object tracking
benchmark. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 37(9):1834–1848.
Yan, B., Peng, H., Fu, J., Wang, D., and Lu, H.
(2021). Learning spatio-temporal Transformer for vi-
sual tracking. In Proceedings of the IEEE/CVF In-
ternational Conference on Computer Vision (ICCV),
pages 10448–10457.
Yilmaz, A., Javed, O., and Shah, M. (2006). Object track-
ing: A survey. ACM computing surveys (CSUR),
38(4):13.
Zhou, H., Yuan, Y., and Shi, C. (2009). Object tracking
using sift features and mean shift. Computer vision
and image understanding, 113(3):345–352.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
750
