
Recovery of Detailed Posture and Shape from Motion Video Images
by Deforming SMPL
Yumi Ando, Fumihiko Sakaue and Jun Sato
Nagoya Institute of Technology, Japan
{sakaue, junsato}@nitech.ac.jp
Keywords:
Detailed Shape Recovery from Video Images, SMPL, Shape Representation by Deformation.
Abstract:
In this research, we propose a method for estimating detailed human shape and posture from video images of a
person in motion. The SMPL (Skinned Multi-Person Linear Model) model can represent various body shapes
with a small number of parameters, but it cannot represent detailed information such as the subject’s clothing
or hairstyle. In this research, we separate such detailed deformations into deformations common to all time
periods and temporary deformations that appear at different times, and recover each of them to realize detailed
human shape recovery from video images of people shot with various postures.
1 INTRODUCTION
In recent years, free viewpoint video technology has
been attracting attention in situations such as watch-
ing sports and live performances, where the audience
can enjoy the video from any viewpoint they wish.
Such images are used for a variety of purposes, es-
pecially in the case of sports games, where a person
is often the subject of the image. Therefore, the gen-
eration of free viewpoint video requires that a person
is captured by multiple cameras and that 3D informa-
tion such as shape and posture is recovered from these
images. In order to achieve this, images taken from
various directions by a large number of synchronized
cameras are usually required. Therefore, it is diffi-
cult to recover detailed 3D information from only a
common camera fixed at a certain location. To solve
this problem and make it more practical, research is
underway to recover the 3D shape and posture of a
person from a single viewpoint image.
Let us consider the case in which a single camera
is used to capture a scene of a person in motion. Al-
though the postures of these images are different at
each time, they can be treated as a group of images
taken from various directions because the relative po-
sition to the camera is changing. Since these images
include detailed shape information of the object, it
is considered possible to analyze these images to re-
store the detailed shape of the object, similar to stereo
reconstruction, even if the images were shot from a
single viewpoint. In this study, we use these images
taken from various postures to recover the shape of
a person, including personal details such as clothing
and hair style, as well as the person’s posture.
In addition, the use of shading information is also
considered in order to recover detailed shapes, includ-
ing the clothing of a person. Shading in an image
is generated depending on the shape of the object.
Therefore, it is known that it is possible to obtain
dense shape information by analyzing this shading in-
formation. When we consider the shape restoration
of a human subject in this study, it is difficult to re-
store fine information such as wrinkles in the cloth-
ing. Therefore, in this study, we will examine the re-
covery of such detailed shape information by using
shading information. The goal of this study is to re-
cover detailed human figures by using time-series im-
ages taken in various postures.
2 RELATED WORKS
A method for simultaneous estimation of body shape
and posture using a generalized model of the human
body as the initial shape has been proposed(Bogo
et al., 2016). Although this method can estimate ac-
curate and natural postures, it is difficult to recover
detailed shapes including clothing and hair because
the shape parameters used for shape representation
are only those embedded in the generalized model.
On the other hand, many methods have been pro-
posed to estimate 3D human pose and shape us-
ing multi-view video(Wang et al., 2023). Multi-
Ando, Y., Sakaue, F. and Sato, J.
Recovery of Detailed Posture and Shape from Motion Video Images by Deforming SMPL.
DOI: 10.5220/0013322400003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
751-757
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
751

view video can be used to estimate pose and shape
more accurately because it contains depth informa-
tion directly. However, this method requires record-
ing system by multiple cameras and synchronising the
videos, which increases the recording cost. Therefore,
it is desirable to recover the 3D pose and shape from
the single-view video.
Furthermore, as one of the methods to directly re-
store shapes from images, an optimization method
based on differentiable rendering has recently been
proposed(Jiang et al., 2020). This method is com-
posed so that the rendering process of the image is
differentiable. This makes it possible to directly min-
imize image errors using gradient methods, etc., and
to easily achieve shape restoration. Therefore, it is
possible to estimate 3D shapes not only from images
taken from multiple viewpoints, but also from images
taken from only a single viewpoint. In addition, it can
be easily combined with a learning-based method us-
ing a neural network, making it applicable to a variety
of scenes. However, accurate restoration from a sin-
gle viewpoint image requires a method that combines
trained models, which causes biases in the training
data to be reflected in the restoration results(Robinette
et al., 2002).
In addition, 3D posture and body shape estimation
from single-view images using a learning model may
produce incorrect estimation results owing to factors
like the race of the person to be reconstructed(Zengin
et al., 2016; Robinette et al., 2002). Our study aims
to alleviate this problem and bring the estimation re-
sults closer to the correct answer by treating a group
of time-series images taken from a single viewpoint
as a group of images taken from practically different
directions.
3 3D RECONSTRUCTION BASED
ON DIFFERENTIABLE
RENDERING
First, we describe an overview of the differentiable
rendering (Kato et al., 2020) that is used in this re-
search for shape restoration. Rendering in computer
graphics refers to the process of converting informa-
tion such as shape, illumination, and camera informa-
tion that compose a 3D space into a 2D image. Be-
cause rendering usually involves discrete processing,
the image obtained by rendering cannot be directly
differentiated by the information to be estimated, such
as shape. Differentiable rendering, on the other hand,
replaces the inherently discrete operation of render-
ing with a differentiable operation in the 3D represen-
tation using a mesh. This makes it possible to dif-
ferentiate the error between the input image and the
rendered image in the same way, thus enabling direct
minimization of image errors using gradient descent
and other similar methods.
This method can be combined with various meth-
ods of optimization using gradient descent methods.
Therefore, 3D restoration methods using differen-
tiable rendering are often used in combination with
3D shape representation methods using neural net-
works. In this study, the posture and shape of a person
are represented based on the SMPL model, which is
then optimized using differentiable rendering to esti-
mate the detailed shape of the object.
4 REPRESENTATION OF HUMAN
POSTURE AND SHAPE USING
SMPL
Next, we describe the SMPL, the posture and shape
representation model of the human body used in
this study. The Skinned Multi-Person Linearmodel
(SMPL)(Loper et al., 2015; Pavlakos et al., 2019)
can represent various body shapes by adding shape
changes that can be expressed with a few parameters
to a standard template mesh. By assigning posture
parameters to the shape, models with a variety of pos-
tures can be easily generated. Let
¯
T be a template
mesh, and consider the possibility of representing 3D
models of various shapes and postures by changing
this mesh. In this case, let β be the shape deforma-
tion parameter and θ be the posture parameter, and let
M(β, θ) be the shape represented by these parameters.
M(β, θ) = W (
¯
T + B
s
(β), θ), (1)
where M is a function that represents the deformation
of the shape represented by β, and represents the shift
of each vertex in the template mesh. Various human
body shapes can be created by using M and β as in-
puts. In the SMPL model, each mesh representing a
shape is associated with a human body, so that various
postures can be represented by changing the posture
parameter θ, which indicates the angle of each joint.
This makes it possible to create arbitrary postures for
deformed shapes, and to create human body shapes
with various body shapes and postures.
The differentiable rendering described above can
be combined with SMPL to estimate the appropriate
shape and orientation for a given image. Let I be the
input image and R be the rendering function by the
differentiable renderer, and define the image error ε
as follows:
ε = |I − R(W (
¯
T + B
s
(β), θ))|, (2)
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
752

where W is a function that parametrically deforms
the mesh by θ, so it is differentiable by θ. Further-
more, R is differentiable as well. This makes it easy to
compute the derivative of the deformation parameter
β and the orientation parameter θ with respect to the
rendered image and minimize ε by gradient descent-
based optimization methods. The obtained β and θ
represent the pose and shape of the input image I.
5 ESTIMATION OF SMPL
INCLUDING DETAILED SHAPE
5.1 Detailed Human Shape
Representation Using SMPL
The SMPL model described above can represent var-
ious body shapes by changing the parameter β that
represents the shape of the person. However, the de-
formable shapes are limited to some extent by the
parameter β included in SMPL alone. Therefore, it
is not possible to represent detailed shape deforma-
tions such as clothing and hair. In addition, although
the SMPL is composed by statistically processing a
large number of human shapes, it is known that the
dataset used to compose the SMPL has some biases
such as racial bias, which may prevent appropriate
representation. Therefore, in this study, in addition
to the shape representation in the SMPL model using
β and θ to represent posture and body shape, a more
detailed shape representation is achieved by deform-
ing the template mesh more directly. For this purpose,
we introduce ∆T and ∆T
i
that represent the displace-
ment of each vertex in the template mesh
¯
T . The ∆T
represents a common shape at all times and is used to
represent the target person’s detailed shape. The ∆T
i
represents the shape that changes at each time, and
represents temporary fluctuations such as the twisting
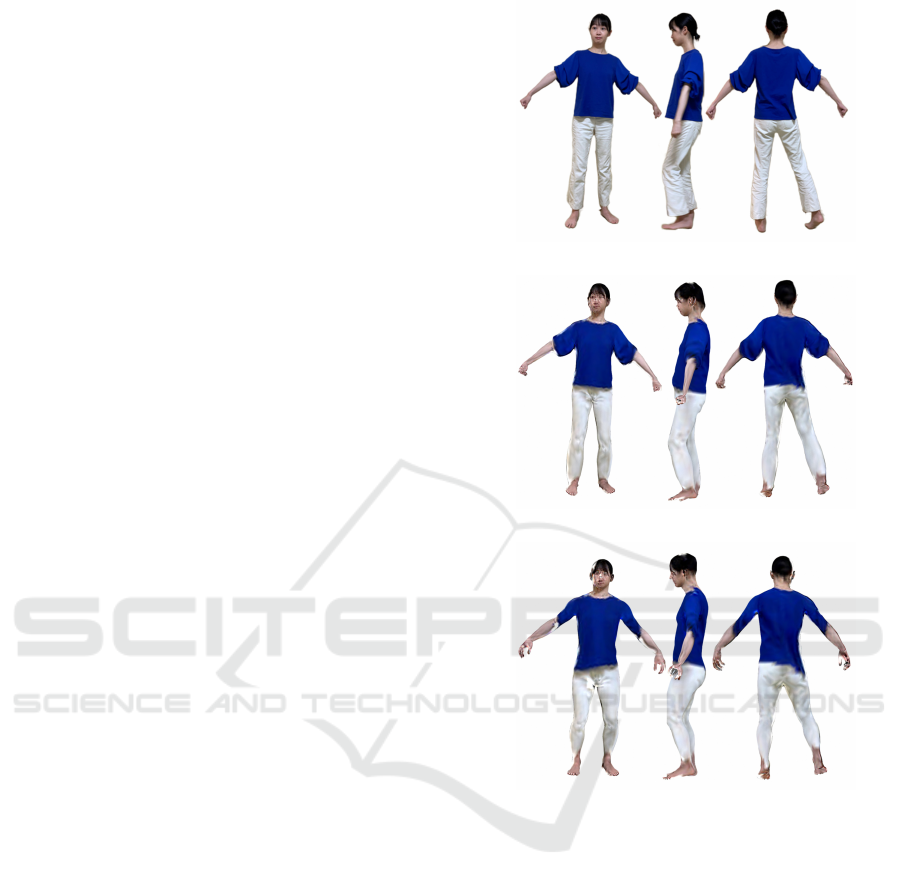
of clothes or hair due to movement. Figure1 shows an
overview of the method. In this figure, the left image
is represented by SMPL only, and the center image is
obtained by adding ∆T . The image on the right shows
the time-specific transform, ∆T
i
, added. The combi-
nation of these two methods provides detailed shape
estimation that cannot be achieved with SMPL.
5.2 Shape Estimation Using
Differentiable Rendering
Now, given n time-series silhouette images I
b
i
(i =
1, ··· , n), consider estimating the shape of a person
from these images. The error ε
b
between all input
images and the SMPL silhouette rendering images is
Figure 1: Detailed shape representation by SMPL deforma-
tion: the left image is represented by SMPL only, the center
image by SMPL+∆T , and the right image by SMPL+∆T +
∆T
i
.
defined as follows:
ε
b
=
n
∑
i=1
|I
b
i
− R
b
(W(
¯
T + ∆T + ∆T
i
+ B
s
(β), θ
i
))| (3)
where R
b
is a differentiable silhouette renderer. By
minimizing this error, we can estimate ∆T that
matches all images and also estimate the detailed
shape deformation ∆T
i
at each time that cannot be rep-
resented by ∆T alone.
To estimate the color and detailed shading infor-
mation of a person, I
c
i
(i = 1, ·· · , n) of n time-series
RGB images are used. The error ε
c
between all in-
put images and SMPL rendered images is defined as
follows:
ε
c
=
n
∑
i=1
|I
c
i
− R
c
(W(
¯
T + ∆T + ∆T
i
+ B
s
(β), θ
i
), ρ, S|
(4)
where R
c
is a differentiable color image renderer that
takes as input the reflectance ρ of each mesh and the
light source parameter S in addition to shape infor-
mation. It is assumed that the object surface can be
represented by a diffuse reflection model. Under this
assumption, the observed color does not change when
the viewpoint changes. Therefore, it is determined by
the reflectance ρ of each mesh and the lighting envi-
ronment. The lighting environment is assumed to be
unchanged at all times, and is a constant parameter
across all time periods. The scene is assumed to be il-
luminated by ambient light and one light source, and
the light parameter S includes the intensity of the am-
bient light and the position and intensity of one light
source. By minimizing the errors expressed by ε
b
and
ε
c
using the gradient descent method, the parameters
of attitude, shape, color, and lighting environment can
be estimated.
However, the large number of meshes in the
SMPL provides a high degree of freedom in estima-
tion, and overfitting to the image occurs when ∆T and
∆T
i
are estimated at the same time. Therefore, the
Laplacian regularization (Nicolet et al., 2021) is used
for the mesh shape to suppress excessive deformation.
Recovery of Detailed Posture and Shape from Motion Video Images by Deforming SMPL
753

Let L be the term related to this Laplacian regulariza-
tion, the error ε to be minimized is expressed by the
following equation.
ε =
n
∑
i=1
|I
b
i
− R
b
(W(
¯
T + ∆T + ∆T
i
+ B
s
(β), θ
i
))|
+ |I
c
i
− R
c
(W(
¯
T + ∆T + ∆T
i
+ B
s
(β), θ
i
), ρ, S|
+ L(T + ∆T + ∆T
i
)
(5)
By minimizing it, we can estimate a smooth shape
that fits all images.
5.3 Regularization for Detailed Shapes
As mentioned in the previous section, ∆T and ∆T
i
in-
troduced for this study have a high degree of free-
dom because all vertices of the template mesh can be
moved. In addition, since the sum of the two transfor-
mations represents the shape at each time, it is possi-
ble to estimate an image that matches each time even
if only ∆T
i
is used. In addition, the aforementioned
Laplacian regularization can smooth the shape when
deforming the mesh, but it does not have the con-
straints of the human body, such as the positions of
body parts, and may generate unnatural shapes for the
human body. To prevent this, regularization is intro-
duced to prevent significant deformation from the ini-
tial shape of SMPL. Specifically, the distance between
the initial SMPL shape
¯
T and the deformed shape
¯
T + ∆T common to all times is minimized. Here, we
define the distance D
r
for regularization of the two
shapes T
1
and T
2
as follows:
D
r
(T
1
, T 2) = ||T
1
−T
2
||
2
+C(T
1
, T
2
)+E(T
1
, T
2
) (6)
where C is the Chamfer distance of the two shapes
and E is the earth mover’s distance(Solomon et al.,
2014). That is, the following equation is minimized
for shape estimation.
ε =
n
∑
i=1
|I
b
i
− R
b
(W(
¯
T + ∆T + ∆T
i
+ B
s
(β), θ
i
))|
+ |I
c
i
− R
c
(W(
¯
T + ∆T + ∆T
i
+ B
s
(β), θ
i
), ρ, S|
+ L((T + ∆T )
+ D
r
(
¯
T ,
¯
T + ∆T )
(7)
The time deformation represented by ∆T
i
should
represent the shape that cannot be represented by ∆T
by minimizing the deformation. Therefore, we mini-
mize the deformation here as well.
ε =
n
∑
i=1
|I
b
i
− R
b
(W(
¯
T + ∆T + ∆T
i
+ B
s
(β), θ
i
))|
+ |I
c
i
− R
c
(W(
¯
T + ∆T + ∆T
i
+ B
s
(β), θ
i
), ρ, S|
+ L((T + ∆T )
+ D
r
(
¯
T ,
¯
T + ∆T )
+ D
r
(
¯
T + ∆T,
¯
T + ∆T + ∆T
i
)
(8)
This allows us to estimate ∆T and ∆T
i
separately.
5.4 Optimization Considering the
Degrees of Freedom of the Target
Finally, we consider minimization methods for the er-
ror. The evaluation equation presented in the previous
section is not convex and has many local solutions.
Therefore, if all parameters are optimized at the same
time, there is a high probability of falling into a lo-
cal solution. Therefore, estimation is performed in
order starting from the parameters with the lower de-
grees of freedom. After fixing the estimated param-
eters, the parameters with higher degrees of freedom
are estimated in turn. Finally, all parameters are es-
timated by optimizing them simultaneously. Consid-
ering the number of parameters, the posture param-
eter θ, the SMPL deformation parameter β, ∆T , and
∆T
i
are estimated in turn. After the shape parame-
ter is estimated from the silhouette information, the
reflectance parameter ρ and the light source parame-
ter S are estimated simultaneously by introducing the
RGB error. Finally, the final solution is obtained by
simultaneously optimizing all parameters of the loss
function for the silhouette image and the loss function
for the RGB image. The above methods can estimate
posture, shape, and texture from time-series images.
6 EXPERIMENTAL RESULTS
6.1 Environment
We present the results of an experiment in which we
estimated the posture and shape of a person in the in-
put images using the method described above. For the
input images, we used 20 images taken from a sin-
gle viewpoint of a person half-turning in place, and
25 images taken from a single viewpoint of a person
moving as if swinging from side to side. Figure 2a
and Fig. 4a show some of these images. These im-
ages were taken with a smartphone camera. The cam-
era was not fixed on a tripod, but was held in the hand.
Therefore, the detailed camera parameters differ from
time to time. The movement of the person was made
so that the distance between the camera and the per-
son was kept constant to some extent.
We utilized Mitsuba3 as the differentiable ren-
derer and adopted the Adam algorithm as the opti-
mization method for minimizing the cost functions.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
754
6.2 Results
The results of the posture and shape reconstruction
using the proposed method are shown in Fig. 2. Fig-
ure 2c shows the result of the restoration using only
SMPL, and Fig. 2b shows the result of the simulta-
neous optimization of posture, shape and texture pa-
rameters using the proposed method. The proposed
method accurately reconstructs the shape of the sub-
ject’s physical features, clothing, and hair style, while
SMPL alone results in shape differences from the in-
put. Figure 3 shows the result of viewing the gen-
erated 3D model from a different aspect. It can be
seen that the natural 3D shape has been restored from
different angles.
Figure 4 and Fig. 5 shows the result of restoring
another object. In this experiment, a subject wearing
clothing with large time variability was restored. The
recovered shape shown in Fig.4 clearly represents the
movement of the clothes represented by ∆T
i
. Figure
5a and 5b show the results of deformation using only
the common shape ∆T at all times, while Fig.4b and
4c show the results when the shape ∆T
i
that changes
at each time is also estimated. These results show that
the introduction of ∆T
i
can represent shape changes
such as skirt swaying, which could not be represented
by ∆T alone. However, the detailed wrinkles of the
clothes are not sufficiently recovered. This may be
due to the fact that the image used as the input for this
study did not have much variation in shading, and the
shading information was expressed as a variation in
reflectance. In order to restore the image using shad-
ows, it is necessary to reduce the degree of freedom
by introducing regularization for reflectance, which
will be discussed in the future.
6.3 Evaluation
In order to evaluate the proposed method in more de-
tail, we present the results of evaluation using syn-
thetic images. We used a 3D character model as an
input image to generate images from various view-
points and postures, from which the shape was re-
stored. Chamfer distance was used to compare the
two shapes. For comparison, the Chamfer distance
was calculated for the results of shape estimation us-
ing only the deformation parameter of SMPL. In order
to eliminate the effect of the posture, a basic posture
was applied to the recovered shapes for comparison.
In order to compare the accuracy of the posture esti-
mation, the distances were calculated for each of the
3D shapes deformed to the posture at each time, and
the average of the distances was calculated.
Figures 6a and 6b show the differences in the
(a) Input images
(b) Estimated results by our proposed method
(c) Estimated results by SMPL
Figure 2: Input images and estimated 3D shapes.
shapes at the basic posture and the differences in the
shapes for the restoration results at a certain time. The
blue shape is the correct shape and the orange shape
is the estimated shape. The left image is the result
of the estimation using only SMPL, and the right im-
age is the result of the estimation using the proposed
method. The results show that the proposed method
is able to represent changes in hair style, etc., and that
it is able to estimate a shape that is close to the input
shape.
The results of the comparison are shown in Table
1 and 2. These values are the mean of the distances
from the vertices in the input model to the nearest
neighbors in the estimated model. The height of the
input model is approximately 175 cm. The results
show that the proposed method is able to estimate a
shape closer to the input in the case of the basic pos-
Recovery of Detailed Posture and Shape from Motion Video Images by Deforming SMPL
755

Figure 3: Observation results from a different perspective.
(a) Input images
(b) 3D shape of
¯
T + ∆T + ∆T
i
for a frame
(c) 3D shape of
¯
T + ∆T + ∆T
i
without texture
Figure 4: Estimated shape with specific deformation.
ture. The error in the evaluation at different times is
also smaller. The reason why the distance is larger
in this result than in the case of the basic posture is
that the error in the estimated posture is reflected in
the error in the shape. Therefore, it can be said that
this result is also reflected in the posture estimation
result. Considering this, it can be expected that the
proposed method can not only estimate the shape of
(a) 3D shape of
¯
T + ∆T
(b) 3D shape of
¯
T + ∆T without texture
Figure 5: Estimated shape without specific deformation.
(a) Comparison in basic posture
(b) Comparison in specific posture in a frame
Figure 6: Comparison between the estimated shape and the
correct shape. Orange shape shows the estimated shape and
blue shape shows the correct shape.
the object, but also improve the accuracy of the pos-
ture estimation. These results confirm that the pro-
posed method can be used to estimate detailed shape
and posture from time-series images that include mo-
tion.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
756
Table 1: Comparison in basic posture using only ∆T [cm].
SMPL Proposed model
4.00 2.95
Table 2: Average of errors at each time when using ∆T
i
[cm].
SMPL
8.12 8.02
7 CONCLUSIONS
In this study, we proposed a method for estimating
the detailed shape and posture of a person from time-
series video images in which the subject’s posture
changes. In order to further improve the accuracy of
estimation, we plan to study more effective methods
for representing and estimating shading information
and for estimating posture.
REFERENCES
Bogo, F., Kanazawa, A., Lassner, Christoph andGehler, P.,
Romero, J., and Black, M. J. (2016). Keep it SMPL:
Automatic estimation of 3D human pose and shape-
from a single image. In Computer Vision – ECCV
2016, Lecture Notes in Computer Science. Springer
International Publishing.
Jiang, Y., Ji, D., Han, Z., and Zwicker, M. (2020). Sdfdiff:
Differentiable rendering of signed distance fields for
3d shape optimization. In The IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR).
Kato, H., Beker, D., Morariu, M., Ando, T., Matsuoka, T.,
Kehl, W., and Gaidon, A. (2020). Differentiable ren-
dering: A survey. CoRR, abs/2006.12057.
Loper, M., Mahmood, N., Romero, J., Pons-Moll, G., and
Black, M. J. (2015). SMPL: A skinned multi-person
linear model. ACM Trans. Graphics (Proc. SIG-
GRAPH Asia), 34(6):248:1–248:16.
Nicolet, B., Jacobson, A., and Jakob, W. (2021). Large
steps in inverse rendering of geometry. ACM Trans.
on Graphics(TOC), 40(6):1–13.
Pavlakos, G., Choutas, V., Ghorbani, N., Bolkart, T., Os-
man, A. A. A., Tzionas, D., and Black, M. J. (2019).
Expressive body capture: 3d hands, face, and body
from a single image. In Proceedings IEEE Conf. on
Computer Vision and Pattern Recognition (CVPR).
Robinette, K., Blackwell, S., Daanen, H., Boehmer, M., and
Fleming, S. (2002). Civilian american and european
surface anthropometry resource (caesar), final report.
volume 1. summary. page 74.
Solomon, J., Rustamov, R., Guibas, L., and Butsche, A.
(2014). Earth mover’s distances on discrete surfaces.
ACM Trans. on Graphics(TOG), 33(4):1–12.
Wang, H.-K., Huang, M., Zhang, Y., and Song, K. (2023).
Multi-view 3d human pose and shape estimation with
epipolar geometry and mix-graphormer. In 2023 8th
International Conference on Intelligent Computing
and Signal Processing (ICSP), pages 28–32.
Zengin, A., Pye, S. R., Cook, M. J., Adams, J. E., Wu, F.
C. W., O’Neill, T. W., and Ward, K. A. (2016). Eth-
nic differences in bone geometry between white, black
and south asian men in the uk. Bone, 91:180 – 185.
Recovery of Detailed Posture and Shape from Motion Video Images by Deforming SMPL
757
