
A Study on the Robustness of Object Detectors in Aqua-Farming
Rajarshi Biswas, Om Khairate, Mohamed Salman and Dirk Werth
August-Wilhelm Scheer Institute, Uni-Campus D 5 1, 66123 Saarbr
¨
ucken, Germany
fi
Keywords:
Deep Learning, Computer Vision, Industrial Application.
Abstract:
In this paper, we study the robustness of state-of-the-art object detectors under transfer learning to detect
live fishes swimming inside a fish tank. To overcome data limitations, we perform experiments in which we
train these detectors with small amounts of annotated data and observe their robustness on out-of-domain
data while tracking performance on in-domain test data. We compare YOLOv8l, RTMDet, RT-DETR, SSD-
MobileNet and Faster-RCNN for performing dense object detection on images of fish schools obtained from
an aqua-farm and observe their robustness on out-of-domain data from the MS COCO, ImageNet, and Pascal
VOC datasets respectively. On the in-domain test set, we achieved the highest detection accuracy of 0.896
mAP with bounding boxes and 0.9214 mAP with instance masks using the YOLOv8l model. However, the
same model exhibits a false positive rate of 55.77% on out-of-domain data from the MS COCO dataset. To
mitigate false positive prediction we studied two different strategies, (1) re-training the models incorporating
out-of-domain data and (2) re-training models by updating only the biases. We found that incorporating out-
of-domain data to train the models leads to the highest reduction in false positive detection, however, this does
not guarantee steady and high performance on the in-domain test data.
1 INTRODUCTION
In the field of computer vision, the problem of ob-
ject detection is one of the fundamental challenges.
The human visual mechanism can easily distinguish
between foreground and background objects while
simultaneously learning the underlying semantics of
the image. However, these tasks still represent signif-
icant hurdles for a computer vision system. Develop-
ments in the past decade in neural network architec-
tures, general-purpose GPU computing power, data
availability, and storage options have transformed ob-
ject detection. Deep convolutional neural networks
proposed by Krizhevsky et al. (Krizhevsky et al.,
2012) mark an important transition from handcrafted
features in object detection. Subsequently, deep net-
works not only outperform traditional methods, but
they also improve their performance with every iter-
ation. The developments in object detection consis-
tently focus on high accuracy and efficiency on stan-
dard datasets. However, the performance of these
detectors on non-curated real-world datasets or un-
der deployment in real situations sharply deteriorates.
This is observed in terms of the drop in accuracy and
lack of robustness as the trained models often have
very high false positive rates on out-of-domain data.
Figure 1: False positives of objects detected as fish on the
MS COCO dataset.
In this paper, we study the robustness of five
highly successful and state-of-the-art neural networks
to perform object detection and instance segmenta-
tion. They are YOLO (Redmon et al., 2016), RTMDet
(Lyu et al., 2022), RT-DETR (Zhao et al., 2024), SSD-
Mobilenet (Howard et al., 2017), and Faster-RCNN
(Ren et al., 2015) respectively on a real-world dataset
for solving a practical business problem. The goal is
814
Biswas, R., Khairate, O., Salman, M. and Werth, D.
A Study on the Robustness of Object Detectors in Aqua-Farming.
DOI: 10.5220/0013342200003905
In Proceedings of the 14th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2025), pages 814-822
ISBN: 978-989-758-730-6; ISSN: 2184-4313
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
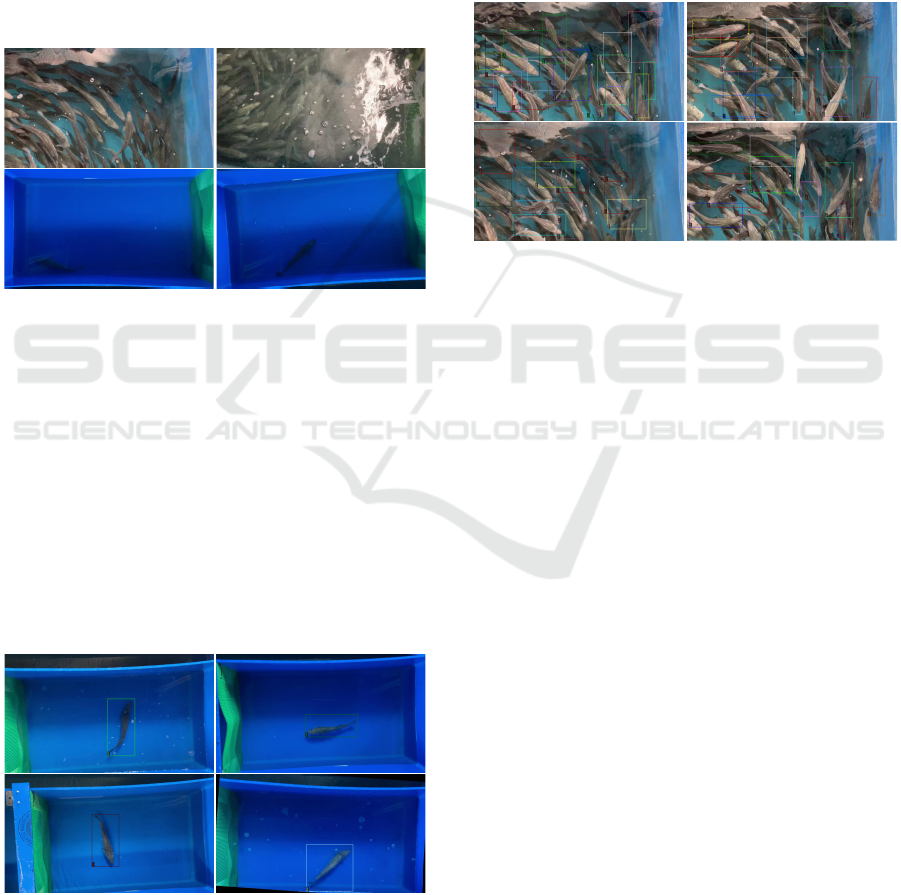
to perform dense detection of live fishes inside a tank
for estimating their physical length and mass. Our
dataset originates from an aquaculture farm in Ger-
many and comprises images of fish schools of dif-
ferent species taken from an overhead camera look-
ing down on the fish tank. This dataset is challenging
compared to the standard datasets used in object de-
tection. This is due to the fact that the dataset suf-
fers from high intra-class variations resulting from
pose, scale, occlusions, blur, etc. (refer to figure 2).
This figure showcases a sample of instances that suf-
fer from a high degree of occlusions, blur, pose and
lighting artifacts.
Figure 2: Challenging instances in our real-world fish
dataset.
We employ the chosen neural networks to per-
form dense detection of fishes on images from this
dataset. To train the models we use transfer learning
and use different types of annotation strategy to create
the training dataset. First, we create a dataset, with the
least effort, comprising images containing a single an-
notated fish in each image, shown in figure 3. Follow-
ing this, we create a second annotated dataset, with
comparatively higher effort, comprising dense anno-
tations of fishes in a cohort environment as seen in
figure 4. The dataset comprises both single and dense
annotations of fishes in a fixed proportion of 10:1.
Figure 3: Bounding-box annotated images containing sin-
gle fish.
More details on the datasets are provided in sec-
tion 3. We extensively study the robustness of the
chosen networks to perform dense object detection
and instance segmentation. This is crucial to en-
sure stable and trustworthy performance under de-
ployment in a business environment. To evaluate the
robustness of the models we compute their false pos-
itive detection rates on out-of-domain data from three
different sources. They are the ImageNet (Deng et al.,
2009), the MS COCO (Lin et al., 2014) and the Pascal
VOC (Everingham et al., 2010) datasets respectively.
Figure 4: Densely annotated fishes with bounding boxes.
We organize our study in different experiments. In
experiment (E1) we incrementally increase the per-
centage of out-of-domain data in the training set to
re-train the models and monitor its influence on the
false positive rate and detection accuracy. In exper-
iment (E2), we perform instance segmentation using
the best-performing neural network from E1. We also
analyze the segmentation performance in terms of ac-
curacy and false positive mask detection by gradually
varying the amount of out-of-domain data used to re-
train the model. Finally, in experiment (E3) we freeze
all the weights in the chosen neural networks and train
only the biases in the networks to study the effect it
has on the false positive rate and detection accuracy.
All the experiments are explained in detail under sec-
tion 4. To summarize, our contributions in this work
are the following:
• We analyze the robustness of five state-of-the-art
neural networks YOLOv8l, RTMDet, RT-DETR,
SSD-Mobilenet and Faster-RCNN for object de-
tection on our challenging real-world dataset by
monitoring their false positive rates on out-of-
domain data from three different datasets.
• We analyze the robustness of instance segmenta-
tion performed by the best network among the five
studied above for object detection.
• We analyze the impact of re-training only the bi-
ases of a network under transfer learning on de-
A Study on the Robustness of Object Detectors in Aqua-Farming
815

tection accuracy and robustness to save computa-
tional budget.
2 RELATED WORK
In the past two decades, object detection has captured
the widespread interest of the vision research com-
munity. Consequently, many techniques have been
developed that are now generating interest from var-
ious industries, such as autonomous driving, auto-
mated manufacturing, medical diagnosis and others.
Object detectors can be broadly grouped into tradi-
tional approaches that employ hand-crafted features
and deep learning based methods. The most well-
known and best-performing traditional object detec-
tors are the Viola-Jones detector (Viola and Jones,
2001), Histogram Of Oriented Gradients (HOG) de-
tector (Dalal and Triggs, 2005) and Deformable Part
Models (Felzenszwalb et al., 2008).
The introduction of deep convolutional neural net-
works (CNN) revolutionized the field of computer vi-
sion. Neural techniques such as AlexNet (Krizhevsky
et al., 2012), VGG network (Simonyan and Zisser-
man, 2014), GoogleNet (Szegedy et al., 2015) and
ResNet (He et al., 2016) were developed in quick suc-
cession and posted superior performance compared
to traditional approaches. Girshick et al. (Girshick
et al., 2014) introduced CNNs for object detection
and subsequently object detection using deep CNNs
has developed at a brisk pace. Neural network-based
object detection can be further grouped into double
stage and single stage techniques. Double or Two
stage detection follows a coarse to fine strategy. The
first stage generates the object proposals while the
second stage performs categorical classification with
refinement of the proposal locations. The Region-
based convolutional neural network (R-CNN) is one
of the first works in this direction. It uses selective
search (Van de Sande et al., 2011) to generate the ob-
ject proposals in the first stage that are classified with
class-specific linear SVMs using features extracted,
from the object proposals, with pre-trained ImageNet
CNNs. This method suffered from slow speed and re-
dundant computations. Spatial pyramid pooling net-
work (SPPnet) (He et al., 2015) was developed to
address this issue which sped up the detection pro-
cess roughly 20 times than the R-CNN through fea-
ture sharing and computing the features from an im-
age only once. Both R-CNN and SPPnet use multi-
stage pipelines for feature extraction, object classifi-
cation and bounding box regression which affect ac-
curacy and speed. Fast R-CNN (Girshick, 2015) in-
troduced a multi-task loss to jointly train the classifier
and bounding box regressor. It also uses hierarchical
sampling to enable feature sharing among proposals
and efficient training. However, it still uses selec-
tive search to generate object proposals. The tech-
nique Faster-RCNN (Ren et al., 2015) employs a Re-
gion Proposal Network (RPN) to generate finer object
proposals using CNN features. RPN creates object
proposals in a sliding window manner upon which
the added convolutional layers simultaneously clas-
sify the proposals as object/non-object and regress
their locations. Faster R-CNN is widely preferred
for detection tasks due to its efficiency and accu-
racy. Based on this architecture, other techniques (Lin
et al., 2017a; Shrivastava et al., 2016) are developed
to incorporate information in scales.
Single stage object detectors are simpler in archi-
tecture and offer faster detection speed. They can be
compared to the RPN that also simultaneously per-
forms object category classification and localization.
The first single stage detector is the YOLO architec-
ture (Redmon et al., 2016) proposed by Redmon et
al. It takes the whole image as input, splits it into a
grid, and then computes a fixed number of bounding
boxes for each grid cell. Following this the proba-
bility of predicting an object in these bounding boxes
are computed along with bounding box regression for
localization. Yolo offers processing speeds from 45
frames per second (fps) to 155 fps in its fast ver-
sion. Single Shot Multibox Detector (SSD) (Liu et al.,
2016) proposed by Liu et al. performs predictions at
different scales using feature maps from different lay-
ers of the network. Multiple scales approach boosts
detection accuracy while handling of object classifi-
cation and localization through convolutional layers
allows integration of features at multiple scales. Lin
et al. proposed focal loss (Lin et al., 2017b) to han-
dle the training problems with foreground and back-
ground proposals in SSD. This helps SSD improve its
performance.
However, a successful transition from effective
academic techniques to full-fledged industrial appli-
cations requires that the techniques are robust and re-
liable under all possible circumstances. Some of the
obstacles that affect the robustness of object detec-
tors, trained under transfer learning, leading to poor
performance under real-world situations are false pos-
itives, domain discrepancy and crafted adversarial ex-
amples. False positives are the predictions that do not
match the ground truth annotations, are misclassified,
or are poorly localized objects. Robustness to false
positives is important to ensure reliable detection per-
formance. So, in this work, we focus our attention on
thoroughly studying the false positive detection char-
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
816

acteristics of five state-of-the-art neural networks to
perform reliable object detection in an industrial set-
ting using transfer learning.
3 DATASET
Our data comprises image frames of fish in isolated
and group environments from 138 videos from an
aquaculture farm in Germany. To promote quick
adoption and ease of use, all videos are captured us-
ing a regular inexpensive camera positioned above
the fish-tanks located on the premises of the aquacul-
ture farm. The entire dataset is divided into two sub-
datasets, that is, (i) a dataset containing mask annota-
tion to perform instance segmentation of fishes (Seg-
mentation dataset) and, (ii) a dataset with bounding
box annotation to detect fishes (Detection dataset).
This dataset contains images of fishes in cohorts as
well as in isolation, i.e., images with a single fish in
them.
The Segmentation dataset consists of a total of
2959 frames partitioned into train, validation and test
sets respectively. Additional images, 1086 to be ex-
act, from public datasets (Garcia-d’Urso et al., 2022;
Saleh et al., 2020) are added to aid the generaliza-
tion of the models. The Detection dataset comprises
2345 image frames extracted from videos containing
a single isolated fish (refer to figure 3), along with
200 images of fish in cohorts. They are densely an-
notated using bounding boxes (refer to figure 4). The
number of densely annotated instances is lower since
it is extremely challenging to identify complete, non-
overlapping fishes in the dense setting. We have to
make a conscious decision during annotation on the
extent of a fish that should be visible to be counted as
a valid detection. This greatly increases the difficulty,
cost and time required to produce the annotations.
Figure 5: Annotations for instance segmentation in dense
setting.
4 METHODOLOGY
In this work, we extensively study the robustness of
five neural architectures, YOLOv8l, RTMDet, RT-
DETR, SSD-MobileNet and Faster R-CNN respec-
tively, for object detection and instance segmentation
tasks through various experiments. All chosen models
are trained using transfer learning on images obtained
from an aquaculture farm to solve the specific tasks
mentioned. Robustness to perform object detection is
tested with all five neural architectures. Subsequently,
we choose the best-performing network from this ex-
ercise, that is, YOLOv8l and test its robustness to per-
form instance segmentation. We study the robustness
of the chosen architectures by primarily focusing on
their false positive decision characteristics on out-of-
domain data. This is because we use transfer learn-
ing to re-train the pre-trained networks on the task-
specific dataset. We observed that under this training
paradigm, the erroneous predictions are overwhelm-
ingly false positives with almost insignificant to no
false negatives. To represent out-of-domain data we
use the images from ImageNet, MS COCO and PAS-
CAL VOC datasets respectively.
In experiment (E1), we train the five chosen net-
works on the Detection dataset for object detec-
tion and observe their false positive rates on the
three datasets mentioned earlier, representing out-
of-domain data. We gradually incorporate out-of-
domain data, in fixed proportions, into the training
process of the models to study its influence on their
false positive rates.
Under experiment (E2), we choose the model with
the best performance from E1, that is, YOLOv8l, and
train it on the Segmentation dataset to study the ro-
bustness of instance segmentation performed by it.
The model is trained by gradually incorporating out-
of-domain data in fixed amounts in the training set
and analyzing its impact on robustness. In this way,
we compare the instance segmentation and object de-
tection performances.
Finally, in experiment (E3), we freeze all the
weights of the networks apart from the biases in the
layers of the network architecture. We train this setup
for object detection using the Detection dataset. Sub-
sequently, we observe the impact of training only the
biases in a network on the false positive rate on out-of-
domain data. For all the experiments described above,
we also carefully observe detection accuracy on the
in-domain test set through metrics, such as precision,
recall and mean average precision.
A Study on the Robustness of Object Detectors in Aqua-Farming
817

5 RESULTS AND DISCUSSION
We trained the YOLOv8l, RTMDet, RT-DETR, SSD-
MobileNet and Faster R-CNN networks for object de-
tection to check their performance and the extent to
which the task suffers from false positive predictions.
For this purpose, we used the Detection dataset and
follow the procedure in experiment E1. We gradu-
ally increased the proportion of out-of-domain data
to train the models and observed its influence on
the false positive rate across different out-of-domain
datasets, i.e., ImageNet, MS COCO and Pascal VOC.
Figure 6 depicts the percentage false positive rate
characteristics of the chosen networks on the out-
of-domain datasets. We observe that YOLOv8l ex-
hibits the sharpest decline in false positive rates when
out-of-domain data is incorporated during the training
process (refer to figure 6).
From Figure 7, we can observe that all the net-
works considered in this study are adequately trained.
Additionally, during the training process, we ensured
that all networks neither overfit nor diverged. We
also observed that under experiment (E1), all five net-
works exhibited the sharpest decline in false positive
rates on the Pascal VOC dataset followed by the MS
COCO and ImageNet datasets. We hypothesize that
this can be due to the relatively simpler underlying
distribution of the Pascal VOC dataset compared to
MS COCO and ImageNet datasets.
The experiments that were conducted with
YOLOv8l, RTMDet, RT-DETR, SSD-MobileNet and
Faster R-CNN show that false positives are a consis-
tent problem. For Faster R-CNN, the Region Proposal
Network (RPN) is tasked with generating region pro-
posals that are likely to contain objects. However, it
works with convolutional feature maps, where back-
ground textures may cause false positives to be pro-
duced by the RPN. It may suggest regions contain-
ing background features that resemble things, such as
textured areas like leaves, water and rocks, and in-
correctly assume that these features could represent
foreground items.
The issue arises due to the Region Proposal Net-
work’s (RPN) challenges in fully differentiating be-
tween actual objects and background patterns, es-
pecially in the early stages of detection. After the
RPN suggests potential regions, Faster R-CNN ex-
tracts fixed-size feature maps from each proposal us-
ing ROI Pooling for classification. When these pro-
posals contain a significant background, such as in
cluttered environments, the model can mistakenly la-
bel the background as an object. Moreover, the pool-
ing operation compresses spatial data, potentially los-
ing fine details that are crucial to distinguish objects
from the background. This can result in the model
incorrectly identifying background areas as objects,
Hence, producing false positives. Faster R-CNN uses
predefined anchor boxes of varying scales and as-
pect ratios to propose regions. While these anchors
are meant to correspond with different object sizes
and shapes, they may not always perfectly align with
the objects in the image. If an anchor box partially
overlaps a background feature or contains both object
and background elements, the RPN might generate a
proposal for that area, contributing to false positives.
This problem becomes more pronounced when back-
ground features have shapes or textures that resemble
the objects the model is trained to detect.
Similar to the Faster R-CNN’s use of a feature
pyramid, SSD makes predictions directly from fea-
ture maps at multiple scales, but SSD predicts objects
densely across multiple grid cells. Each grid cell is
responsible for detecting objects within its receptive
field. When background elements exhibit structured
patterns or textures, e.g., waves, leaves, or shadows,
the model can mistake them for objects. This is be-
cause SSD lacks explicit mechanisms to differentiate
fine-grained details across spatial regions. It can over-
fit to background noise in highly textured scenes. Mo-
bileNet, as the backbone of SSD, is highly efficient
and lightweight but focuses highly on reducing model
complexity. This results in shallower feature maps
that might not capture enough information to distin-
guish between subtle differences in background tex-
tures and objects. Due to this, the model may become
overly sensitive to background patterns that resemble
objects, leading to false positives, particularly in clut-
tered environments. SSD-MobileNet processes local
image patches for object detection and does not have
a strong mechanism to integrate global context (i.e.,
relationships between different regions of the image).
In scenes with ambiguous background features, the
model may not have enough contextual information
to determine whether a detected region is part of the
background or a real object. Without this global con-
text, SSD can struggle to suppress background activa-
tions and might produce more false positives in com-
plex or cluttered environments.
Similarly, RTMDet, a YOLO-based architecture,
heavily relies on dense convolutional features ex-
tracted across various levels of a feature pyramid net-
work (FPN). This design allows the model to de-
tect objects at multiple scales, making it highly effi-
cient in real-time scenarios. However, its reliance on
dense feature extraction across the entire image grid
can lead to complications, particularly when dealing
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
818
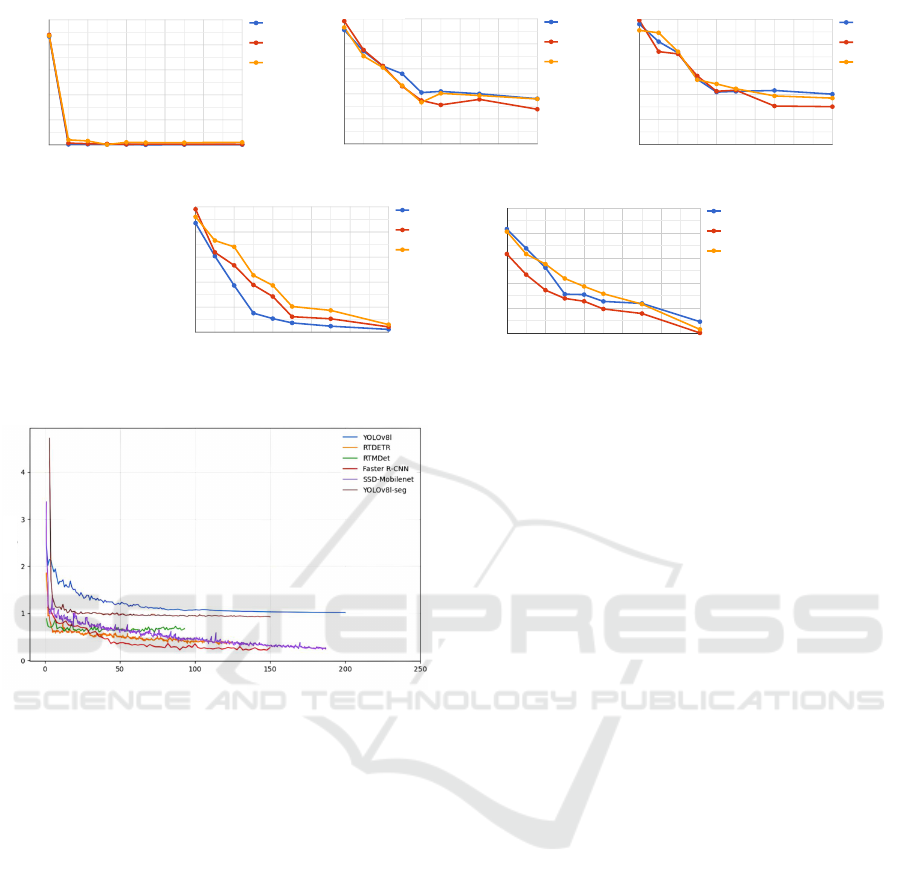
YOLOv8l RTM_DET RT_DETR
SSDMobileNetV2 Faster-RCNN
Out-of-domain Data Percentage
Out-of-domain Data Percentage
Out-of-domain Data Percentage
Out-of-domain Data Percentage Out-of-domain Data Percentage
False Positive Rate
False Positive Rate
False Positive Rate
False Positive Rate
False Positive Rate
Figure 6: False positive rates for chosen networks under experiment E1.
Epochs
Training Loss
Figure 7: Training loss for networks under experiment E1.
with cluttered backgrounds or textures that resem-
ble objects. Being an anchor-free detector, RTMDet
predicts objects by focusing on key-point detection,
specifically the center points of objects. In images
with cluttered or complex backgrounds, the model
may struggle to accurately localize the center of an
object because multiple regions could present similar
characteristics. Since RTMDet does not use prede-
fined anchor boxes to guide the localization process
(as anchor-based methods do), it can sometimes be
influenced by background elements that mimic ob-
ject shapes or textures, especially when those ele-
ments appear near the expected center points of the
target objects. This can cause the model to gener-
ate false positives by assigning object labels to back-
ground regions that exhibit center-like features. RT-
MDet uses multi-scale feature maps to detect objects
of various sizes, but the aggregation of these features
from different layers can introduce noise when the
background exhibits high variance across scales. For
example, a large object (like a tree in the background)
may have high feature activations at lower pyramid
levels (which detect large objects), while finer tex-
tures (like leaves) might generate activations in higher
pyramid levels (which detect smaller objects). This
can cause feature interference where the model ag-
gregates irrelevant background features from differ-
ent scales, leading to over-sensitivity to background
elements that resemble objects, resulting in false pos-
itives.
In a transformer-based system, like RT-DETR, the
self-attention mechanism allows each pixel to poten-
tially attend to every other pixel in the image. While
this is a useful technique for modeling long-range de-
pendencies and relationships, it can also cause the
model to focus on background areas or other irrele-
vant areas, particularly in cases when the object’s fea-
tures visually resemble or overlap with those of the
background. If the model is unable to distinguish be-
tween foreground objects and background regions, at-
tention heads may erroneously recognise background
attributes and link them with object classes when con-
ducting object recognition tasks. False positives may
emerge from the model misinterpreting background
elements as foreground objects, particularly in cir-
cumstances when backdrop textures or patterns have
properties similar to those of the target objects. Trans-
formers primarily depend on learned connections, be-
tween parts of an image as opposed to neural net-
works (CNNs) or traditional object detectors that fo-
cus on specific areas and defined anchor boxes, e.g.,
in anchor-based methods. Since RT-DETRs are based
on transformers and lack the biases found in CNNs
that limit attention to regions of the image, they may
erroneously link background details throughout the
whole image with object detection. In detectors like
RT-DETR that rely heavily on transformers to identify
A Study on the Robustness of Object Detectors in Aqua-Farming
819
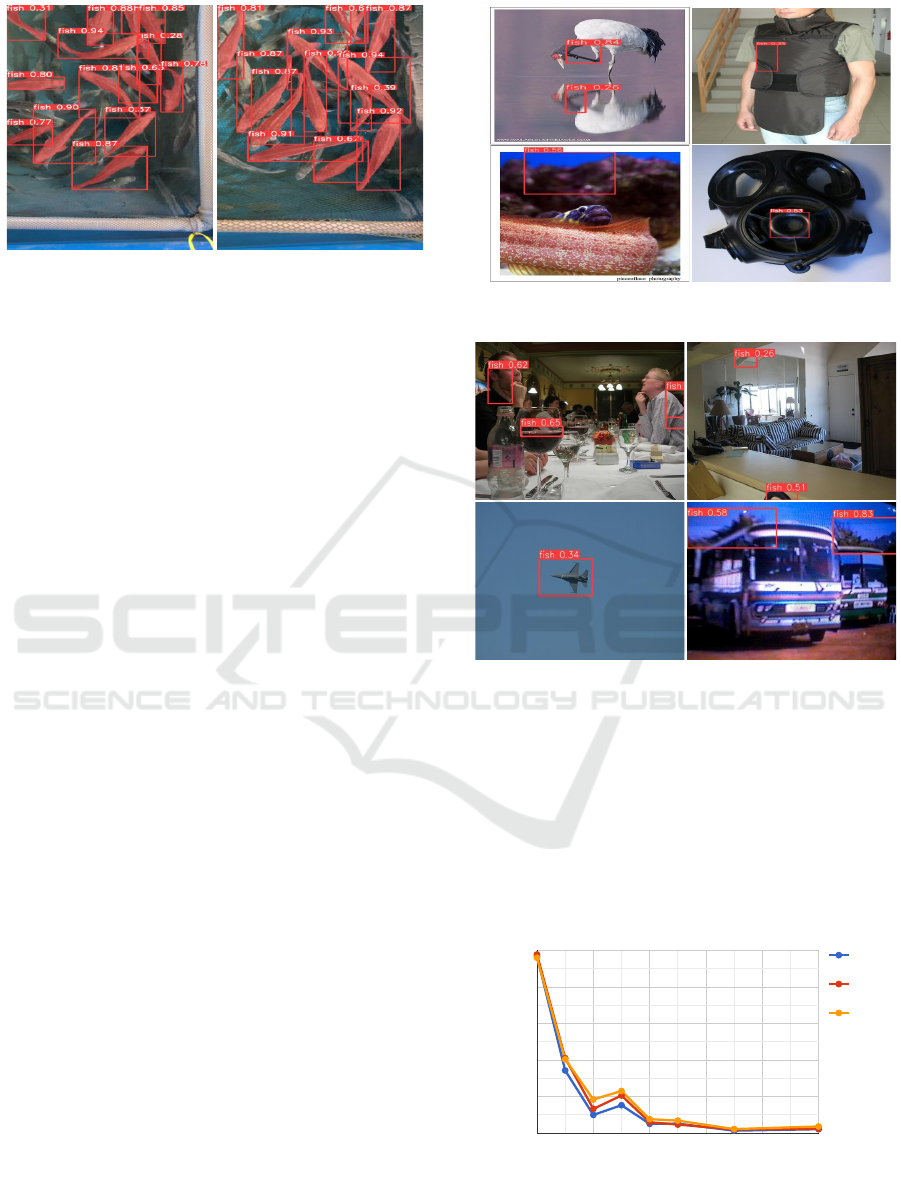
Figure 8: Segmentations performed by YOLOv8l on in-
domain data.
objects in images and produce detection boxes, the
choice of object queries is crucial for results. If these
queries are not initialized correctly they may end up
focusing on areas without objects which can lead to
predictions and mistaken identifications of objects.
Transformers can be affected by forms of interference
in images like occlusions, compression artifacts and
background noise such as reflections or shadows. The
RT-DETR model may produce results due to its fo-
cus on connections. This could lead to even minor
background disturbances being interpreted as impor-
tant features. Transformers have the potential to am-
plify the influence of areas compared to CNN mod-
els which tend to be more robust due to their pooling
mechanisms. Positional encodings, in transformers,
are used to retain information. They are learned and
not directly linked to the physical arrangement of ob-
jects. The global attention mechanism may be unable
to distinguish between background regions and object
boundaries if the model’s learned positional encod-
ings are insufficient or sub-optimal. This could result
in false positives, where background areas are mistak-
enly regarded as objects.
We selected YOLOv8l from E1 as it performed
best among all the networks for experiment E2. In
this experiment, we trained the YOLOv8l model on
the Segmentation dataset (refer to section 3) for in-
stance segmentation and obtained an impressive per-
formance of 0.9214 mAP on the in-domain test data.
Figure 8 shows examples of mask-based detection
from the model on our in-domain test set. Subse-
quently, we checked the robustness of the model on
out-of-domain data from the MS COCO, Pascal VOC
and ImageNet datasets. We found that the model per-
formed poorly on out-of-domain data from all three
datasets with false positive rates of 55.77%, 47.08%
and 59.08% on MS COCO, Pascal VOC and Ima-
geNet respectively. Figure 1 shows some false pos-
itive examples on the MS COCO data. False positive
detections on ImageNet and Pascal VOC datasets are
Figure 9: False positive predictions on ImageNet dataset.
Figure 10: False positive predictions on the Pascal VOC
dataset.
depicted in figure 9 and figure 10 respectively.
Following the strategy explained in experiment
(E1) we gradually incorporate out-of-domain data in
our training set and observe the influence it has on
the false positive rate. We re-train the model on all
three datasets using a batch size of 16 and a learning
rate of 0.01 with early stopping at 124 epochs. From
YOLOv8l-seg
False
Positive Rate
Out-of-domain Data Percentage
Figure 11: False positive rate of YOLOv8l for segmentation
under experiment E2.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
820
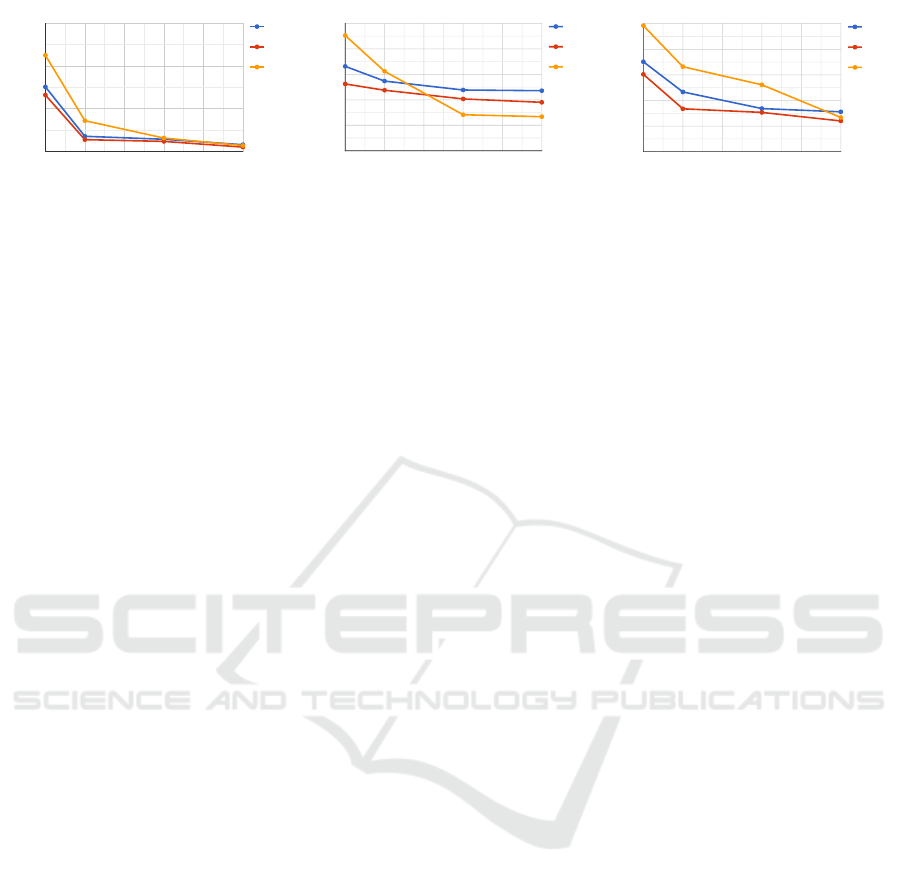
YOLOv8l
SSDMobileNetV2
Faster-RCNN
Out-of-domain Data Percentage Out-of-domain Data Percentage Out-of-domain Data Percentage
False Positive Rate
False Positive Rate
False Positive Rate
False Positive Rate
Figure 12: False positive rates for chosen networks under experiment E3.
figure 11 we can see that the false positive rate de-
clines sharply but it also affects the accuracy of the
model. On the in-domain test set the mAP drops to
41% with out-of-domain data at 50 percent level of
the in-domain training data. It also exhibits shape hal-
lucinations in certain images. One possible cause for
this could be an imbalance in the losses. Bounding
box loss, objectness loss, class loss, and mask loss
are the several loss components that YOLOv8l seg-
mentation model integrates into a single weighted to-
tal loss. A weighting error could cause some parts of
the model (like the mask prediction) to become un-
duly dominant. For example, if the mask loss weight
is disproportionately high compared to the weights for
box loss or objectness loss, the model may prioritise
mask formation even in situations where the bound-
ing box detection is erroneous. This could also be the
reason for the lower adaptation of the false positive
rate to the usual YOLOv8l models.
In experiment (E3), we freeze all the weights apart
from the biases in the layers of the chosen networks
and train them with the in-domain dataset. Figure
12 depicts the results obtained from this experiment.
We observe that YOLOv8l has the best performance
against false positives when trained with different
datasets. Also, we observe that under this experi-
ment, the three networks achieve lower false positive
rates with out-of-domain data from a larger dataset
like ImageNet which can have a much more complex
data distribution. This is in contrast with the results
obtained under experiment (E1) where all three net-
works achieved better false positive rates on out-of-
domain data.
6 CONCLUSION
In this work, we highlighted the problems associated
with the robustness of state-of-the-art neural networks
to perform reliable object detection in an industrial
setting under transfer learning. We thoroughly stud-
ied the ability of five networks, YOLOv8l, RTMDet,
RT-DETR, SSD-MobileNet and Faster R-CNN re-
spectively, to handle out-of-domain data by carefully
observing their false positive detection rates. To study
this, we performed three different experiments E1, E2
and E3 with out-of-domain data from three different
sources, that is, the MS COCO, the Pascal VOC and
the ImageNet datasets. We found that under challeng-
ing industrial settings with limited availability of data,
the neural network models are capable of achieving
good performance on the in-domain data, but their
performance sharply degrades on out-of-domain data.
This is reflected by the high false positive detection
rates from all the chosen networks on out-of-domain
data from different sources. We found that the intro-
duction of out-of-domain data in the training process
of the models helps to lower the false positive detec-
tion rate, but does not completely solve the problem
to the extent that the models can be deployed reliably.
Interestingly, we observed that performing only bias
updates during re-training of the models with out-of-
domain data leads to the sharpest decline in false posi-
tive rates for all the networks, even on the largest out-
of-domain dataset, i.e., ImageNet in our study. We
intend to study this aspect in more detail in our future
work.
ACKNOWLEDGEMENTS
This research was funded in part by the German Fed-
eral Ministry of Education and Research (BMBF) un-
der the project FishAI (Grant number 031B1252B).
REFERENCES
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In 2005 IEEE com-
puter society conference on computer vision and pat-
tern recognition (CVPR’05), volume 1, pages 886–
893. Ieee.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
A Study on the Robustness of Object Detectors in Aqua-Farming
821

Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2010). The pascal visual object
classes (voc) challenge. International journal of com-
puter vision, 88:303–338.
Felzenszwalb, P., McAllester, D., and Ramanan, D. (2008).
A discriminatively trained, multiscale, deformable
part model. In 2008 IEEE conference on computer
vision and pattern recognition, pages 1–8. Ieee.
Garcia-d’Urso, N., Galan-Cuenca, A., P
´
erez-S
´
anchez, P.,
Climent-P
´
erez, P., Fuster-Guillo, A., Azorin-Lopez,
J., Saval-Calvo, M., Guill
´
en-Nieto, J. E., and Soler-
Capdep
´
on, G. (2022). The deepfish computer vision
dataset for fish instance segmentation, classification,
and size estimation. Scientific Data, 9(1):287.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
international conference on computer vision, pages
1440–1448.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detec-
tion and semantic segmentation. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 580–587.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Spatial pyra-
mid pooling in deep convolutional networks for visual
recognition. IEEE transactions on pattern analysis
and machine intelligence, 37(9):1904–1916.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D.,
Wang, W., Weyand, T., Andreetto, M., and Adam,
H. (2017). Mobilenets: Efficient convolutional neu-
ral networks for mobile vision applications. arXiv
preprint arXiv:1704.04861.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. Advances in neural information processing
systems, 25.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017a). Feature pyramid networks
for object detection. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2117–2125.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017b). Focal loss for dense object detection. In
Proceedings of the IEEE international conference on
computer vision, pages 2980–2988.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Com-
puter Vision–ECCV 2014: 13th European Confer-
ence, Zurich, Switzerland, September 6-12, 2014, Pro-
ceedings, Part V 13, pages 740–755. Springer.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In Computer Vision–ECCV 2016:
14th European Conference, Amsterdam, The Nether-
lands, October 11–14, 2016, Proceedings, Part I 14,
pages 21–37. Springer.
Lyu, C., Zhang, W., Huang, H., Zhou, Y., Wang, Y., Liu, Y.,
Zhang, S., and Chen, K. (2022). Rtmdet: An empirical
study of designing real-time object detectors. arXiv
preprint arXiv:2212.07784.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 779–
788.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. Advances in neural information
processing systems, 28.
Saleh, A., Laradji, I. H., Konovalov, D. A., Bradley, M.,
Vazquez, D., and Sheaves, M. (2020). A realistic fish-
habitat dataset to evaluate algorithms for underwater
visual analysis. Scientific Reports, 10(1):14671.
Shrivastava, A., Gupta, A., and Girshick, R. (2016). Train-
ing region-based object detectors with online hard ex-
ample mining. In Proceedings of the IEEE conference
on computer vision and pattern recognition, pages
761–769.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 1–9.
Van de Sande, K. E., Uijlings, J. R., Gevers, T., and Smeul-
ders, A. W. (2011). Segmentation as selective search
for object recognition. In 2011 international confer-
ence on computer vision, pages 1879–1886. IEEE.
Viola, P. and Jones, M. (2001). Rapid object detection us-
ing a boosted cascade of simple features. In Proceed-
ings of the 2001 IEEE computer society conference on
computer vision and pattern recognition. CVPR 2001,
volume 1, pages I–I. Ieee.
Zhao, Y., Lv, W., Xu, S., Wei, J., Wang, G., Dang, Q., Liu,
Y., and Chen, J. (2024). Detrs beat yolos on real-time
object detection. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recog-
nition, pages 16965–16974.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
822
