
Enhancing Student Engagement and Learning Outcomes Through
Multimodal Robotic Interactions: A Study of non-Verbal Sound
Recognition and Touch-Based Responses
Rezaul Tutul
1a
, Ilona Buchem
2
and André Jakob
2
1
Department of Mathematics and Natural Sciences, Humboldt University of Berlin, Berlin, Germany
2
HARMONIK, Berliner Hochschule für Technik, Berlin, Germany
Keywords: Educational Robotics, Student Engagement, non-Verbal Interaction, Sound Recognition, Pepper Robot.
Abstract: This study examines the impact of multimodal robotic interactions on student engagement, motivation, and
learning outcomes in an educational quiz-based setting using the Pepper robot. Two interaction modalities
were compared: touch-based inputs (control group) and non-verbal sound-driven responses (experimental
group), where students used coughing, laughing, whistling, and clapping to select answers. A novel
quantitative metric was introduced to evaluate the effect of sound-driven interactions on engagement by
analysing sound frequency, recognition accuracy, and response patterns. A between-subjects experiment with
40 undergraduate students enrolled in a C programming course was conducted. Motivation and engagement
were assessed using the Intrinsic Motivation Inventory (IMI), while learning outcomes were measured
through quiz performance (accuracy and response time). The results indicate that sound-driven interactions
significantly improved quiz performance compared to touch-based inputs suggesting enhanced cognitive
processing and active participation. However, no significant difference in motivation or engagement was
observed between the groups (IMI subscale analysis, p > 0.05). These findings highlight the potential of
sound-driven human-robot interactions to enhance learning experiences by activating alternative cognitive
pathways.
1 INTRODUCTION
The integration of humanoid robots in education is
transforming learning environments by offering
interactive, personalized, and multimodal
engagement (Belpaeme et al., 2018; Tutul et al.,
2024; Buchem et al. 2024). Educational robots like
Pepper provide students with new ways to interact
with learning materials, shifting from traditional
interfaces (e.g., keyboards, touchscreens) to more
natural, intuitive communication methods, such as
gesture, voice, and non-verbal sound-based
interactions (Ouyang & Xu, 2024; Moraiti et al.,
2022). While previous research has demonstrated the
effectiveness of robot-assisted learning in enhancing
motivation and engagement (Andić et al., 2024;
Parola et al., 2021), there is limited empirical
evidence on how non-verbal sound-driven responses
influence learning outcomes and cognitive
engagement in educational settings.
a
https://orcid.org/ 0000-0002-8604-8501
Student motivation and engagement are essential
for academic success and knowledge retention (Ryan
& Deci, 2000). Studies on intrinsic motivation
suggest that active participation and novel interaction
methods can foster deeper cognitive engagement
(Huang & Hew, 2019; Wang et al., 2019). While
traditional touch-based interactions remain widely
used, they do not fully leverage multimodal
capabilities in human-robot interaction (HRI). Non-
verbal sound recognition, such as clapping, whistling,
coughing, and laughing, offers an alternative hands-
free, engaging interaction method (Li & Finch, 2021).
However, research in this domain remains scarce, and
the impact of non-verbal sound-driven interactions on
learning outcomes has not been systematically
studied (Fridin, 2014).
Additionally, while gamified quizzes and
multimodal robotic interactions have been explored
in educational robotics (Grover et al., 2016), the
relationship between sound-driven engagement,
Tutul, R., Buchem, I. and Jakob, A.
Enhancing Student Engagement and Learning Outcomes Through Multimodal Robotic Interactions: A Study of non-Verbal Sound Recognition and Touch-Based Responses.
DOI: 10.5220/0013353800003932
In Proceedings of the 17th International Conference on Computer Supported Education (CSEDU 2025) - Volume 2, pages 131-138
ISBN: 978-989-758-746-7; ISSN: 2184-5026
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
131

motivation, and learning performance is still
underexamined. Moreover, previous studies lack a
structured quantitative metric for assessing the
engagement impact of non-verbal interactions,
making it difficult to determine their effectiveness
compared to traditional methods.
To address this gap, this study investigates the
impact of non-verbal sound-driven interactions on
student motivation, engagement, and learning
outcomes using the Pepper humanoid robot in a quiz-
based learning environment. Two interaction
modalities are compared:
1. Touch-based interaction (control group):
Students select quiz answers using Pepper’s
tablet interface.
2. Non-verbal sound-driven interaction
(experimental group): Students respond
using predefined sounds (e.g., coughing,
whistling, laughing, clapping), recognized
via YAMNet-based sound recognition
system.
2 RELATED WORKS
2.1 Sound Recognition in Educational
Robotics
Recent advancements in human-robot interaction
(HRI) have enabled robots to process non-verbal
communication cues, such as gestures and sound-
based interactions, to enhance student engagement
and learning (Ouyang & Xu, 2024; Parola et al.,
2021). Non-verbal sound cues including clapping,
whistling, laughing, and coughing are widely
recognized in speech and affective computing but
remain underexplored in educational robotics (Fridin,
2014). Prior research has shown that sound-based
interaction methods can improve social engagement
in assistive robotics (Lea et al., 2022) and emotional
responsiveness in child-robot interaction (Song et al.,
2024). However, their application in formal learning
environments remains limited.
The use of pre-trained deep learning models like
YAMNet has significantly improved sound
classification in robotic systems (Tutul et al., 2023).
While studies have evaluated YAMNet's accuracy in
detecting human-generated sounds, its impact on
student engagement and learning outcomes in robot-
assisted education has yet to be systematically
examined. This study addresses this gap by exploring
how non-verbal sound recognition influences
motivation, engagement, and quiz performance.
2.2 Measuring Learning Outcomes and
Engagement in Educational
Robotics
Student engagement plays a crucial role in knowledge
retention and active learning (Ryan & Deci, 2000).
Several studies have explored how educational
robotics can enhance student motivation through
interactive and multimodal learning experiences
(Belpaeme et al., 2018; Andić et al., 2024). However,
engagement measurement in robotic learning
environments remains a challenge, as traditional
methods rely heavily on self-reported surveys rather
than objective interaction metrics (Huang & Hew,
2019).
The Intrinsic Motivation Inventory (IMI) is one of
the most widely used psychometric tools for
evaluating student engagement and motivation (Ryan
& Deci, 2000). While IMI has been successfully
applied to robot-assisted learning (Mubin et al.,
2013), it does not fully capture real-time engagement
levels during interaction. To address this limitation,
this study introduces a novel quantitative metric that
evaluates engagement through sound frequency,
recognition accuracy, and response patterns. This
metric provides a more comprehensive assessment of
active participation in multimodal learning
environments.
2.3 Interaction Modalities in Learning
Environments
Previous studies have investigated different
interaction modalities in educational settings,
including gesture-based, voice-based, and touch-
based interactions (Huang et al., 2019; Wang et al.,
2019). Touch-based interfaces, such as robotic
tablets, remain the most commonly used method for
student interaction (Ching & Hsu, 2023). However,
recent research suggests that multimodal approaches,
which combine touch, gesture, and speech-based
input, can significantly enhance learning experiences
by promoting active engagement and cognitive
processing (Li & Finch, 2021).
Despite these advancements, there has been
limited exploration of non-verbal sound-driven
responses as a primary interaction method in learning
environments (Han et al., 2008). The novelty of this
study lies in its comparative analysis of touch-based
and sound-driven responses, allowing for a better
understanding of multimodal interaction benefits.
CSEDU 2025 - 17th International Conference on Computer Supported Education
132
2.4 Research Gaps and Contributions
Existing studies on sound recognition in educational
robotics primarily focus on technical accuracy rather
than cognitive engagement and learning outcomes
(Han et al., 2008; Moraiti et al., 2022). Additionally,
while IMI has been used to measure motivation, few
studies incorporate real-time behavioural engagement
metrics (Ouyang & Xu, 2024). This study bridges
these gaps by:
1. Evaluating the impact of non-verbal sound
recognition on student engagement and
learning outcomes.
2. Introducing a novel quantitative metric for
assessing sound-driven engagement in
robotic learning environments.
3. Providing an empirical comparison between
sound-driven and touch-based interaction
modalities in educational settings.
By addressing these research gaps, this study
contributes to the design of adaptive, multimodal
human-robot interaction systems that can be scaled
across various learning disciplines.
3 METHODOLOGY
This study employed a between-subjects
experimental design to evaluate the effects of touch-
based and non-verbal sound-driven interactions on
student motivation, engagement, and learning
outcomes in a robot-assisted quiz-based learning
environment. The experiment was conducted using
the Pepper humanoid robot, and participants
interacted with the system through one of two
modalities: a traditional touch interface (control
group) or a sound-driven interaction method
(experimental group). The study aimed to investigate
whether sound-based responses could enhance
engagement and learning compared to traditional
input methods.
3.1 Participants
A total of 40 undergraduate students (aged 18–29, M
= 22.1, SD = 2.4) from a German university
participated in this study. All participants were
enrolled in an introductory C programming course
and had prior exposure to educational robots through
coursework, ensuring familiarity with human-robot
interaction. They were randomly assigned to either
the control group (n = 20), where they used Pepper’s
touchscreen interface to select quiz answers, or the
experimental group (n = 20), where they responded
using predefined non-verbal sounds (coughing,
laughing, whistling, and clapping) recognized by
YAMNet-based sound recognition system. Informed
consent was obtained from all participants, and
ethical approval was granted by the university’s
ethics committee.
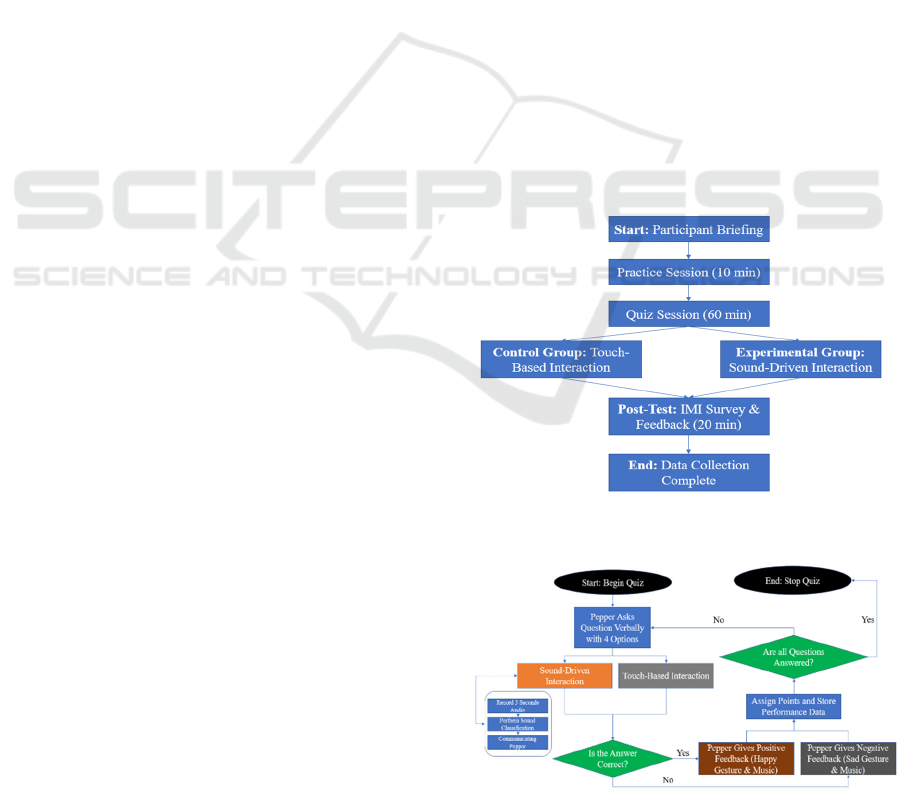
3.2 Experimental Design
The experiment was structured into three phases (see
figure 1 and 2). First, a 10-minute briefing and
practice session was conducted, during which
participants were introduced to the robot and the
interaction modality assigned to their group. The
main quiz session lasted 60 minutes, where each
participant attempted 15 multiple-choice questions
categorized into three difficulty levels (easy, medium,
and hard). The control group answered via touch-
based selection, while the experimental group
provided answers using non-verbal sounds mapped to
specific answer choices (e.g., coughing = Option A).
To ensure fairness, the robot’s verbal and visual
feedback was kept consistent across both groups. The
final phase consisted of a 20-minute post-experiment
evaluation, where participants completed the Intrinsic
Motivation Inventory (IMI) questionnaire and
Figure 1: Experimental process.
Figure 2: Quiz game algorithm flowchart.
Enhancing Student Engagement and Learning Outcomes Through Multimodal Robotic Interactions: A Study of non-Verbal Sound
Recognition and Touch-Based Responses
133

provided qualitative feedback on their experience.
The study took place in a quiet, controlled
environment to minimize external distractions and
ensure reliable sound recognition.
3.2.1 Interaction Modalities
Control Group (Touch-Based Interaction):
Participants selected answers via Pepper’s
touchscreen (see figure 3). Upon selection, the robot
provided verbal confirmation and visual feedback
(head nod/shake).
Experimental Group (Sound-Driven Interaction):
Participants responded by producing predefined non-
verbal sounds (see figure 2). YAMNet is used in the
server-client architecture to recognize the sound and
mapped it to the corresponding answer choice (e.g.,
coughing = Option A, laughing = Option B, clapping
= Option C, whistling = Option D). If recognition was
successful, Pepper confirmed the answer verbally and
displayed visual feedback.
Figure 3: Sound driven and touch based interaction.
3.3 Materials and Setup
The sound-driven quiz game system employed a
client-server architecture (see figure 4). Pepper,
acting as the client, was responsible for interacting
with participants by asking quiz questions and
providing verbal and gesture-based feedback. The
server recognizing sound-driven responses (laughing,
coughing, clapping, and whistling), by integrating
YAMNet, a deep learning model for sound
classification, communicating Pepper, and managing
quiz questions and performance tracking.
Figure 4: Sound-driven and touch-based interaction
architecture.
An external microphone setup was used to
enhance recognition accuracy by reducing
background noise. The quiz content focused on C
programming concepts, such as variables, loops, and
conditions, ensuring alignment with the students'
coursework. Each question had four answer choices,
mapped to four distinct sound responses in the
experimental group: Coughing (Option A), Whistling
(Option B), Laughing (Option C), and Clapping
(Option D). The system logged response accuracy,
completion time, and recognition errors, which were
later analyzed to evaluate interaction effectiveness.
3.4 Data Collection and Measures
To assess motivation and engagement, this study used
the Intrinsic Motivation Inventory (IMI), which
consists of six subscales: Interest/Enjoyment,
Perceived Competence, Effort/Importance,
Pressure/Tension, Perceived Choice, and
Value/Usefulness. Each subscale was rated on a 5-
point Likert scale (1 = Strongly Disagree to 5 =
Strongly Agree). Responses were collected after the
quiz session to capture changes in engagement levels.
Learning outcomes were measured based on quiz
performance, specifically through the number of
correct answers and average response time per
question. Additionally, a novel quantitative metric
was introduced to analyse sound-driven engagement,
considering sound frequency, recognition accuracy,
and response patterns to evaluate active participation
in multimodal interaction.
3.5 Data Analysis
For data analysis, descriptive statistics were used to
calculate means and standard deviations for IMI
subscales, quiz accuracy, and response times.
Independent t-tests were conducted to compare IMI
scores and quiz performance between the two groups,
and effect sizes (Cohen’s d) were computed to
determine the magnitude of observed differences. The
statistical hypotheses tested were (H1) sound-driven
interactions improve quiz accuracy compared to
touch-based interactions, and (H2) sound-driven
interactions enhance engagement and motivation, as
measured by IMI subscales. To control for potential
confounds, the study ensured that all quiz questions,
robot responses, and environmental conditions were
identical across both groups.
Ethical considerations were strictly followed in
this study. Participants were fully informed about the
study's objectives, procedures, and their rights to
withdraw at any time. All collected data were
CSEDU 2025 - 17th International Conference on Computer Supported Education
134
anonymized, and confidentiality was maintained
throughout the research process. The findings from
this study aim to contribute to advancing multimodal
interaction designs in educational robotics, helping
future research develop more adaptive and engaging
human-robot learning environments.
4 RESULT
This section presents the findings of the study,
including descriptive statistics (see table 1),
inferential analyses, and insights into the
effectiveness of sound-driven interactions compared
to touch-based interactions. The results focus on
motivation, engagement, and learning outcomes,
measured through the Intrinsic Motivation Inventory
(IMI) and quiz performance metrics. Additionally,
recognition accuracy of sound-driven responses is
analysed to understand its impact on student
interaction.
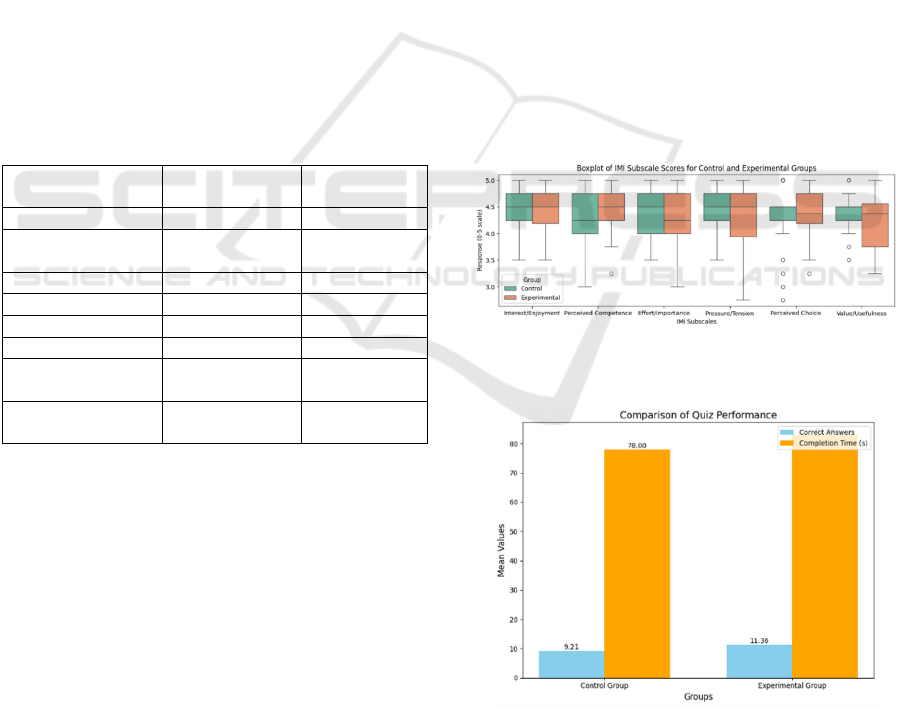
Table 1: Descriptive Statistics for IMI subscales and quiz
performance metrics between control and experimental
groups.
Subscales Control
(N = 20)
Experimental
(N = 20)
Interest/Enjoyment 4.44 (0.69) 4.41 (0.71)
Perceived
Com
p
etence
4.28 (0.70)
4.38 (0.77)
Effort/Importance 4.39 (0.66) 4.32 (0.75)
Pressure/Tension 4.40 (0.59) 4.25 (0.70)
Perceived Choice 4.26 (0.66) 4.35 (0.82)
Value/Usefulness 4.38
(
0.72
)
4.23
(
0.79
)
Correct Answers
(out of 15)
9.21 (1.55) 11.36 (1.0)
Completion Time
(
seconds
)
78 (9.75) 83 (7.54)
The Intrinsic Motivation Inventory (IMI)
subscales were analysed to assess differences in
motivation and engagement between the control
(touch-based) and experimental (sound-driven)
groups. A paired t-test comparing post-session IMI
scores revealed no statistically significant differences
between the two groups across interest/enjoyment
(p=0.72), perceived competence (p=0.63),
effort/importance (p = 0.58), pressure/tension (p =
0.81), perceived choice (p=0.74), and
value/usefulness (p = 0.69). These results suggest that
while both interaction methods engaged students
similarly, sound-driven interactions did not lead to a
measurable improvement in self-reported motivation.
Contrary to initial expectations, the use of non-verbal
sound cues did not significantly enhance student
engagement as measured by IMI, though qualitative
feedback suggested that some participants found the
experience more immersive.
In terms of learning outcomes, quiz performance
was significantly higher in the experimental group
compared to the control group. An independent
samples t-test showed that the mean number of
correct answers was significantly higher in the sound-
driven group (M = 11.36, SD = 1.00) compared to the
touch-based group (M = 9.21, SD = 1.55), t = 5.47, p
< 0.001, Cohen’s d = 1.21, indicating a large effect
size in favour of the experimental group. These
findings suggest that sound-driven interactions
facilitated deeper cognitive engagement and
improved accuracy in answering quiz questions.
However, mean completion times per question were
slightly longer for the experimental group (M = 83s,
SD = 7.54) than for the control group (M = 78s, SD =
9.75). A t-test comparing response times revealed no
statistically significant difference, t = 1.37, p = 0.18,
suggesting that response efficiency was comparable
between the two modalities. While sound-based
responses took marginally longer, the difference was
not substantial enough to indicate a cognitive load
trade-off.
Figure 5: Boxplot of IMI Subscale Scores for Control and
Experimental Groups.
Figure 6: Quiz Performance Bar Chart.
Figure 5 presents a boxplot of IMI subscale scores,
showing similar distributions across both groups. The
boxplot confirms that motivation levels were
Enhancing Student Engagement and Learning Outcomes Through Multimodal Robotic Interactions: A Study of non-Verbal Sound
Recognition and Touch-Based Responses
135

comparable, as indicated by overlapping distributions
across IMI subscales. The bar chart in Figure 6
illustrates the experimental group’s higher average
quiz scores and slightly longer completion times
compared to the control group.
The recognition accuracy of sound-driven
responses was also evaluated to understand its
influence on student performance and interaction
preferences. The overall recognition accuracy of the
YAMNet model was 94%, with coughing (97%) and
whistling (98%) achieving the highest accuracy,
while laughing (90%) and clapping (92%) had
slightly lower recognition rates. Analysis of response
patterns indicated that students preferred sounds with
higher recognition accuracy, suggesting that system
reliability influenced interaction behaviour.
Misclassification events were rare but occurred
primarily in cases where laughing and clapping were
confused. While these errors did not significantly
affect overall quiz performance, they highlight
potential technical limitations in real-time sound
recognition systems.
To further explore engagement beyond IMI
scores, a novel quantitative metric was introduced,
analysing sound frequency, recognition accuracy, and
response trends. Findings indicated that students in
the experimental group used coughing and whistling
more frequently due to higher recognition accuracy,
while laughing and clapping were used less often.
This suggests that students subconsciously adapted
their interaction choices based on system reliability,
reinforcing the importance of sound recognition
accuracy in multimodal learning environments.
Overall, the results indicate that sound-driven
interactions significantly improved learning
outcomes, as evidenced by higher quiz accuracy in
the experimental group. However, engagement levels
remained comparable to the control group, suggesting
that while non-verbal sound cues introduced novelty,
they did not significantly enhance intrinsic
motivation. These findings highlight the potential of
sound-based human-robot interaction for learning
environments, while also emphasizing the need for
further refinements in recognition accuracy and
system adaptability.
5 DISCUSSION
This study examined the impact of non-verbal sound-
driven interactions on student engagement,
motivation, and learning outcomes in a robot-assisted
quiz-based learning environment. The results indicate
that sound-driven interactions significantly improved
quiz performance, as students in the experimental
group outperformed those in the control group in
terms of accuracy (t = 5.47, p < 0.001, Cohen’s d =
1.21). However, self-reported motivation and
engagement, measured through the Intrinsic
Motivation Inventory (IMI), did not show significant
differences between the two groups. This finding
suggests that while sound-based interactions
enhanced learning effectiveness, they did not
intrinsically increase engagement or motivation
beyond the level achieved through traditional touch-
based interactions. This contradicts initial
expectations that introducing non-verbal sound cues
would lead to greater cognitive engagement and
enjoyment. One possible explanation is that while
sound-driven interactions required more active
participation, they may not have been perceived as
more enjoyable than touch-based selections, leading
to similar IMI scores across groups.
A key insight from this study is that the cognitive
processing required for sound-based responses may
have contributed to improved quiz performance. The
requirement to generate a non-verbal sound, wait for
recognition, and receive feedback likely enhanced
attention and retention, leading to higher accuracy in
quiz responses. This aligns with prior research
suggesting that multimodal interactions can stimulate
deeper cognitive processing, thereby improving
learning outcomes (Huang & Hew, 2019). However,
it is also important to consider the impact of
recognition accuracy on interaction efficiency. The
sound recognition system (YAMNet) achieved an
overall accuracy of 94%, but misclassification rates
were higher for laughing and clapping. Interestingly,
students in the experimental group naturally preferred
sounds with higher recognition accuracy (coughing
and whistling), indicating that interaction choices
were subconsciously influenced by system reliability.
This suggests that while sound-based interaction can
be effective, its success depends on the accuracy and
robustness of the recognition model and use case.
Future work should explore adaptive recognition
systems that can learn and optimize interactions based
on user behaviour.
Another important finding concerns response
time differences between the two groups. While the
experimental group had slightly longer completion
times per question (M = 83s vs. M = 78s), this
difference was not statistically significant (t = 1.37, p
= 0.18). This suggests that sound-driven interactions
did not impose a major cognitive load penalty,
making them a viable alternative to touch-based
interactions in robot-assisted learning environments.
However, it is worth considering whether the
CSEDU 2025 - 17th International Conference on Computer Supported Education
136

increased response time contributed to the higher quiz
accuracy in the experimental group. Future studies
should investigate whether the improved
performance was a direct result of the interaction
modality itself or simply a by-productB NM; of
slower, more deliberate responses.
Although the findings provide strong support for
sound-driven interactions in learning environments,
there are several limitations to consider. First, the
study was conducted in a controlled laboratory
setting, which may not fully replicate real-world
classroom conditions, where factors like peer
influence, background noise, and social pressure
could affect engagement and performance.
Additionally, the sample size (N = 40) was relatively
small, limiting the generalizability of the results.
Future research should expand the sample size and
conduct longitudinal studies to examine whether the
benefits of sound-based interactions persist over time.
Furthermore, while IMI provided useful self-reported
insights, alternative engagement measures such as
eye-tracking, physiological responses, or real-time
interaction analytics could offer a more objective
evaluation of engagement levels.
Overall, the findings highlight the potential of
sound-driven human-robot interactions to enhance
learning outcomes by promoting active participation
and cognitive processing. While motivation levels
remained comparable between the two groups, the
higher quiz accuracy in the experimental group
suggests that non-verbal sound interactions can be an
effective alternative to traditional input methods in
educational robotics. Future work should focus on
improving recognition accuracy and use case,
exploring multimodal adaptive learning systems, and
testing these interactions in real-world educational
settings to further validate their effectiveness.
6 CONCLUSIONS
This study investigated the impact of non-verbal
sound-driven interactions on student engagement,
motivation, and learning outcomes in a robot-assisted
quiz-based learning environment. The findings reveal
that students who interacted with the Pepper robot
using sound-based responses achieved significantly
higher quiz accuracy than those who used touch-
based interactions (t = 5.47, p < .001, Cohen’s d =
1.21), suggesting that non-verbal sound cues may
enhance cognitive processing and knowledge
retention. However, motivation and engagement
levels, as measured by the Intrinsic Motivation
Inventory (IMI), did not show significant differences
between the two groups, indicating that while sound-
based interactions improved learning outcomes, they
did not intrinsically increase student motivation
beyond traditional input methods. These results
emphasize that while multimodal interactions can
optimize learning efficiency, their ability to enhance
motivation depends on additional factors such as user
preference and system reliability.
Overall, this study highlights the potential of non-
verbal sound-driven interactions in educational
robotics, particularly in enhancing learning outcomes
through increased cognitive engagement. While
motivation levels remained similar across interaction
methods, the findings suggest that sound-based
responses can serve as an effective alternative to
touch-based inputs in quiz-based learning. As
educational technology advances, future research
should aim to design scalable, adaptive human-robot
interaction systems that cater to diverse learning
needs and optimize multimodal engagement
strategies in real-world educational settings.
REFERENCES
Andić, B., Maričić, M., Mumcu, F., & Flitcroft, D. (2024).
Direct and indirect instruction in educational robotics:
A comparative study of task performance per cognitive
level and student perception. Smart Learning
Environments, 11(12). https://doi.org/10.1186/s40561-
024-00298-6
Belpaeme, T., Kennedy, J., Ramachandran, A., Scassellati,
B., & Tanaka, F. (2018). Social robots for education: A
review. Science Robotics, 3(21), eaat5954.
https://doi.org/10.1126/scirobotics.aat5954
Buchem, I., Tutul, R., Bäcker, N. (2024). Same Task,
Different Robot. Comparing Perceptions of Humanoid
Robots Nao and Pepper as Facilitators of Empathy
Mapping. In: Biele, C., et al. Digital Interaction and
Machine Intelligence. MIDI 2023. Lecture Notes in
Networks and Systems, vol 1076. Springer, Cham.
https://doi.org/10.1007/978-3-031-66594-3_14
Ching, Y.-H., & Hsu, Y.-C. (2023). Educational Robotics
for Developing Computational Thinking in Young
Learners: A Systematic Review. In TechTrends (Vol.
68, Issue 3, pp. 423–434). Springer Science and
Business Media LLC. https://doi.org/10.1007/s11528-
023-00841-1
Fridin, M. (2014). Storytelling by a kindergarten social
assistive robot: A tool for constructive learning in
preschool education. Computers & Education, 70, 53–
64. https://doi.org/10.1016/j.compedu.2013.07.043
Grover, S., Bienkowski, M., Tamrakar, A., Siddiquie, B.,
Salter, D., & Divakaran, A. (2016). Multimodal
analytics to study collaborative problem solving in pair
programming. In Proceedings of the Sixth International
Conference on Learning Analytics & (pp. 516–
Enhancing Student Engagement and Learning Outcomes Through Multimodal Robotic Interactions: A Study of non-Verbal Sound
Recognition and Touch-Based Responses
137

517). the Sixth International Conference. ACM Press.
https://doi.org/10.1145/2883851.2883877
Han, J., Jo, M., Jones, V., & Jo, J. H. (2008). Comparative
study on the educational use of home robots for
children. Journal of Information Processing Systems,
4(4), 159–168.
Huang, B., & Hew, K. F. (2019). Effects of gamification on
students’ online interactive patterns and peer-feedback.
Distance Education, 40(3), 350–376. https://doi.org/
10.1080/01587919.2019.1632168
Lea, C., Huang, Z., Jain, D., Tooley, L., Liaghat, Z.,
Thelapurath, S., Findlater, L., & Bigham, J. P. (2022).
Non-verbal sound detection for disordered speech. In
Proceedings of the 2022 CHI Conference on Human
Factors in Computing Systems (pp. 1-14).
Li, Y., & Finch, A. (2021). Exploring sound use in
embodied interaction to facilitate learning: An
experimental study. Journal of Applied Instructional
Design, 11(4).
Moraiti, A., Moumoutzis, N., & Christodoulakis, S. (2022).
Educational robotics and STEAM: A review. Frontiers
in Education, 7, 1-18.
Mubin, O., Stevens, C. J., Shahid, S., Al Mahmud, A., &
Dong, J. J. (2013). A review of the applicability of
robots in education. Technology for Education and
Learning, 1, 1–7.
Ouyang, F., & Xu, W. (2024). The effects of educational
robotics in STEM education: A multilevel meta-
analysis. International Journal of STEM Education,
11(7). https://doi.org/10.1186/s40594-024-00469-4
Parola, A., Vitti, E. L., Sacco, M. M., & Trafeli, I. (2021).
Educational Robotics: From Structured Game to
Curricular Activity in Lower Secondary Schools. In
Lecture Notes in Networks and Systems (pp. 223–228).
Springer International Publishing.
Ryan, R. M., & Deci, E. L. (2000). Intrinsic and extrinsic
motivations: Classic definitions and new directions.
Contemporary Educational Psychology, 25(1), 54–67.
https://doi.org/10.1006/ceps.1999.1020
Song, H., Huang, S., Barakova, E. I., Ham, J., &
Markopoulos, P. (2024). How social robots can
influence motivation as motivators in learning: A
scoping review. In Proceedings of the 16th
International Conference on PErvasive Technologies
Related to Assistive Environments (PETRA '23) (pp. 1-
8). ACM. https://doi.org/10.1145/3594806.3604591
Tutul, R., Jakob, A., & Buchem, I. (2023). Sound
recognition with a humanoid robot for a quiz game in
an educational environment. Advances in Acoustics -
DAGA 2023, 938–941.
Tutul, R., Buchem, I., Jakob, A., & Pinkwart, N. (2024).
Enhancing Learner Motivation, Engagement, and
Enjoyment Through Sound-Recognizing Humanoid
Robots in Quiz-Based Educational Games. In Lecture
Notes in Networks and Systems (pp. 123–132).
Springer Nature Switzerland.
Wang, W., Li, R., Diekel, Z., & Jia, Y. (2019). Controlling
object hand-over in human-robot collaboration via
natural wearable sensing. IEEE Transactions on
Human-Machine Systems, 49(1), 59-71.
Yolcu, A., & Demirer, V. (2023). The effect of educational
robotics activities on students' programming success
and transfer of learning. Education and Information
Technologies, 28(6), 7189-7212.
CSEDU 2025 - 17th International Conference on Computer Supported Education
138
