
FlexCloud: Direct, Modular Georeferencing and Drift-Correction of
Point Cloud Maps
Maximilian Leitenstern
a
, Marko Alten, Christian Bolea-Schaser, Dominik Kulmer
b
,
Marcel Weinmann
c
and Markus Lienkamp
d
Institute of Automotive Technology, Technical University of Munich, Boltzmannstraße 15, 85748 Garching, Germany
Keywords:
Mapping, Georeferencing, Sensor Fusion, Point Clouds, Autonomous Driving.
Abstract:
Current software stacks for real-world applications of autonomous driving leverage map information to ensure
reliable localization, path planning, and motion prediction. An important field of research is the generation of
point cloud maps, referring to the topic of simultaneous localization and mapping (SLAM). As most recent
developments do not include global position data, the resulting point cloud maps suffer from internal distor-
tion and missing georeferencing, preventing their use for map-based localization approaches. Therefore, we
propose FlexCloud for an automatic georeferencing of point cloud maps created from SLAM. Our approach is
designed to work modularly with different SLAM methods, utilizing only the generated local point cloud map
and its odometry. Using the corresponding GNSS positions enables direct georeferencing without additional
control points. By leveraging a 3D rubber-sheet transformation, we can correct distortions within the map
caused by long-term drift while maintaining its structure. Our approach enables the creation of consistent,
globally referenced point cloud maps from data collected by a mobile mapping system (MMS). The source
code of our work is available at https://github.com/TUMFTM/FlexCloud.
1 INTRODUCTION
So-called High-Definition (HD) maps are considered
a key technology to enable real-world autonomous
driving (Seif and Hu, 2016) as they provide essential
prior information on static surroundings of the vehi-
cle, including temporally occluded objects (Bao et al.,
2022; Srinara et al., 2023). Therefore, HD maps can
be seen as an additional sensor facilitating localiza-
tion and motion planning by combination with other
sensors, such as a Global Navigation Satellite System
(GNSS), an Inertial Measurement Unit (IMU), or a
Light Detection and Ranging (LiDAR) system. Un-
like traditional Standard-Definition (SD) maps used
for navigation, HD maps feature an accuracy of 10 cm
to 20 cm (Jeong et al., 2022). Depending on the appli-
cation’s requirements, different map representations
evolved (Khoche et al., 2022). Hence, an HD map
is usually split into a point cloud map (PCM) and a
vector map (Jeong et al., 2022). While a PCM de-
a
https://orcid.org/0009-0008-6436-7967
b
https://orcid.org/0000-0001-7886-7550
c
https://orcid.org/0009-0008-7174-4732
d
https://orcid.org/0000-0002-9263-5323
Data Collection
Preprocessing
Point Cloud
Map Generation
Vector Map
Generation
Figure 1: Steps for HD map generation (extended from (Sri-
nara et al., 2023)).
picts the 3D structure of objects by individual points,
a vector map represents the location of relevant ob-
jects (e.g., lanes, traffic signs) by combining points,
lines, and polygons (Jeong et al., 2022). Leveraging
the strengths of the respective map format, the PCM
is used for localization while the vector map assists
during motion planning (Jeong et al., 2022).
HD map generation can be classified into offline and
online approaches (Bao et al., 2022). Following the
architecture of the presented approach, this work clas-
sifies as a tool to enhance the offline generation of
HD maps. This process generally comprises the steps
Leitenstern, M., Alten, M., Bolea-Schaser, C., Kulmer, D., Weinmann, M. and Lienkamp, M.
FlexCloud: Direct, Modular Georeferencing and Drift-Correction of Point Cloud Maps.
DOI: 10.5220/0013359600003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 157-165
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
157

shown in Figure 1. It starts with data collection using
a MMS (Bao et al., 2023). During data preprocessing,
several algorithms are applied to the collected LiDAR
data to facilitate the creation of the PCM in the fol-
lowing step (Bao et al., 2023; Srinara et al., 2023).
After that, a PCM is created by aligning the individ-
ual LiDAR scans, usually using scan registration tech-
niques. In the last step, the vector map is created from
the PCM, completing the HD map.
The generation of PCMs from sensor data is ex-
tensively studied in the literature, usually known as
SLAM. However, recent developments within this
field focus on approaches that only use LiDAR and,
occasionally, IMU data. Although this reduces the
required data sources and avoids calibration or time
synchronization issues, the created local PCM inher-
ently suffers from long-term drift and missing global
reference. Hence, georeferencing and correction for
the long-term drift are necessary to leverage these
maps for localization, especially if global GNSS co-
ordinates are used with a LiDAR-based approach. In
a previous work of ours (Leitenstern et al., 2024), we
presented an approach to overcome this issue. How-
ever, our approach still suffered from the required
manual effort and the limitation to 2D. Therefore,
in this paper, we present FlexCloud as a modular
pipeline to overcome these limitations. Our contri-
butions are as follows:
• We propose a novel, modular approach to auto-
matically georeference local PCMs created from
SLAM.
• We use an interpolation-based strategy to auto-
matically determine control points (CPs) from the
corresponding GNSS positions, considering their
uncertainty.
• We implement a 3D rubber-sheet transformation
with Delaunay triangulation to effectively correct
the long-term drift of the PCM while maintaining
its structure and continuity.
• We open-source our pipeline as a standalone ROS
2-package upon acceptance of our work.
We evaluate the results of our pipeline on self-
recorded data at the Yas Marina Circuit (YMC) in
Abu Dhabi, UAE. Additionally, we present the re-
sults for sequence 00 of the KITTI vision benchmark
suite (Geiger et al., 2012; Geiger et al., 2013) to
demonstrate its generalizability.
2 RELATED WORK
This chapter classifies different methods for georef-
erencing of mapping data and presents related work
regarding the creation of PCMs.
2.1 Georeferencing of Mapping Data
Generally, georeferencing describes the problem of
finding the transformation parameters of a local set
of points to a common global reference system, such
as WGS84 (Paffenholz, 2012; Lasse Klingbeil, 2023).
Initially, a LiDAR captures point clouds in a local co-
ordinate system. With scan registration techniques,
the relative transformation between single scans can
be computed, and thus, the scans can be assembled
to a local PCM. The transformation of this PCM to
a global frame is referred to as georeferencing and is
described by the following equation (Wilkinson et al.,
2010):
x
G
= s R
G
S
x
S
+t
G
S
. (1)
The transformation of a point x
S
in the PCM consists
of the rotation R
G
S
, the translation t
G
S
and the scal-
ing parameter s, with the indices S and G referring to
the local, LiDAR frame and the global frame, respec-
tively. According to Paffenholz (Paffenholz, 2012),
georeferencing techniques can be classified as fol-
lows:
• Indirect Georeferencing:
These methods use well-spread ground CP, whose
coordinates are known locally and globally. The
coordinates may be obtained by detection ap-
proaches and surveys in local and global frames.
The additional effort needed to capture the ground
CP is a drawback, making the method time-
consuming.
• Direct Georeferencing:
This approach utilizes data from external sensors,
usually a GNSS receiver, attached to the LiDAR
during data acquisition. Thus, the transformation
parameters are directly available from the data ac-
quisition.
• Data-Driven Georeferencing:
These methods leverage existing georeferenced
data to match the newly acquired data. However,
this requires a preceding indirect or direct georef-
erencing to generate this data.
As our approach classifies as a direct method for geo-
referencing, the following section reviews existing
approaches within this field.
2.2 Direct Point Cloud Georeferencing
In 2005, Schuhmacher and B
¨
ohm (Schuhmacher and
Boehm, 2005) compared different techniques for geo-
referencing in architectural modeling applications.
For direct georeferencing, they combined a low-cost
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
158

GNSS system with a digital compass to get the trans-
lation and rotation parameters of the transformation,
respectively. Wilkinson et al. (Wilkinson et al., 2010)
utilize a dual-antenna GNSS system to capture the
orientation of the LiDAR. As the accuracy suffers
in bad GNSS conditions, they combine it with pho-
togrammetric observations of a camera in a subse-
quent work (Wilkinson et al., 2015). Osada et al. (Os-
ada et al., 2017) propose a method for direct geo-
referencing that leverages an external, global earth
gravity model and thus only requires a minimum
number of GNSS measurements. They use a least
squares method to estimate the transformation param-
eters from a GNSS position and the vertical deflec-
tion components of the LiDARs rotational axis, deter-
mined within the gravitational force field of the earth
gravity model.
However, the approaches presented so far have in
common that they do not consider the mapping sys-
tem in a mobile operating mode, thus neglecting un-
certainties from kinematic measurement noise and ge-
ometric falsification offsets (Liu et al., 2021). To geo-
reference LiDAR data from an MMS, Oria-Aguilera
et al. (Oria-Aguilera et al., 2018) leverage a Real-
Time Kinematic (RTK) GNSS system, providing
centimeter-level accuracy. They use interpolation to
relate the LiDAR scans with GNSS poses to account
for issues from different frequencies and time syn-
chronization. The GNSS receiver’s Inertial Naviga-
tion System (INS) is used to directly determine the
transformation parameters for georeferencing without
using scan registration techniques. A drawback of
this method is the reliance on the INS solution and,
thus, good GNSS coverage. To this end, Hariz et
al. (Hariz et al., 2021) present an approach for cre-
ating georeferenced PCMs using SLAM. They use
the Cartographer SLAM (Hess et al., 2016), taking
LiDAR point clouds, IMU measurements, and RTK-
corrected GNSS positions as input to create submaps,
which are later concatenated to a global map. Koide
et al. (Koide et al., 2019) present a similar approach,
including GNSS constraints in a graph-based SLAM
algorithm to generate georeferenced PCMs.
However, many advancements in LiDAR odome-
try and SLAM concentrate on algorithms that rely
only on LiDAR and potentially IMU data, e.g.
LOAM (Zhang and Singh, 2014), LeGO-LOAM (Shan
and Englot, 2018), SuMa++ (Chen et al., 2019), LIO-
SAM (Shan et al., 2020), FAST-LIO (Xu and Zhang,
2021; Xu et al., 2021), and KISS-ICP (Vizzo et al.,
2023). As the PCMs generated with these approaches
are in a local frame and distorted due to long-term
drift, we presented FlexMap Fusion in a previous
work (Leitenstern et al., 2024). It leverages rubber
sheeting, an approach for the alignment of two spatial
datasets (Marvin S. White and Griffin, 1985), based
on RTK-corrected GNSS positions and the SLAM tra-
jectory. Although this work demonstrates the general
concept of the approach, it is limited to 2D and re-
quires manual effort to select CPs on the GNSS and
SLAM trajectories.
3 METHODOLOGY
To enable georeferencing of PCMs generated from
SLAM algorithms, we present FlexCloud. It is de-
signed to work with various SLAM approaches and
can transform the generated PCM to a global frame
while correcting the long-term drift resulting from
scan registration errors. FlexCloud is intended for
use with an MMS, providing LiDAR and GNSS data,
preferably from an RTK-corrected GNSS receiver.
Figure 2 illustrates the usage of FlexCloud based on
these inputs. After data recording, an odometry tra-
jectory and a corresponding initial PCM must be gen-
erated using SLAM. The experiments in this work
are conducted with trajectories generated from KISS-
ICP (Vizzo et al., 2023) with additional loop closure
constraints inserted using Interactive SLAM (Koide
et al., 2021). This process proved robust and accu-
rate results for PCM generation, as shown in Sauer-
beck et al. (Sauerbeck et al., 2023). The resulting
odometry trajectory with the corresponding PCM and
the GNSS trajectory are the inputs to FlexCloud, con-
sisting of the modules Keyframe Interpolation, Rigid
Alignment, and Rubber-Sheet Transformation. The
following sections describe the modules in detail.
3.1 Keyframe Interpolation
This module determines temporal correspondences
between the GNSS and odometry trajectories, later
used to select CPs for georeferencing. As a first step,
the global GNSS positions are transformed into met-
ric coordinates to facilitate mathematical operations
and computations. FlexCloud implements a transfor-
mation to the East-North-Up (ENU) frame using Geo-
graphicLib
1
. However, other transformations, such as
the Universal Transverse Mercator (UTM) projection,
may be used as well (Groves, 2013).
Our Keyframe Interpolation is based on the use
of the multidimensional spline curves implemented in
Eigen
2
. The shape of the B-spline, defined by a set of
1
https://geographiclib.sourceforge.io/
2
https://eigen.tuxfamily.org
FlexCloud: Direct, Modular Georeferencing and Drift-Correction of Point Cloud Maps
159

SLAM
Keyframe
Interpolation
Rigid Alignment
Rubber-Sheet
Transformation
Odometry
Trajectory
Global
Trajectory
FlexCloud
Local Point
Cloud Map
Global Point
Cloud Map
Figure 2: Flowchart illustrating the creation of a global, georeferenced PCM using FlexCloud. The computations within the
single modules are conducted with the global GNSS trajectory and the local odometry trajectory. The resulting transformations
from the Rigid Alignment and the Rubber-Sheet Transformation are then applied to the PCM.
x
y
p
g,t−2
p
g,t−1
p
g,t
p
g,t+1
p
g,t+2
p
g,t
0
,inter
Reference point
to
Figure 3: Principle of Keyframe Interpolation. For interpo-
lation of the global position corresponding to the odometry
position at time t
o
, four reference points on the global tra-
jectory (blue points) are necessary. The interpolated global
position p
g,t
0
,inter
is on the resulting spline (green).
GNSS keyframes, follows the equation:
C(u) =
n
∑
i=0
N
i,p
(u)P
i
(2)
A point C(u) on the spline is described by the basis
function N
i,p
(u) of degree p, the curve parameter u,
and the reference point P
i
. We implement a spline of
degree p = 3, requiring four reference points. The
reference points are selected by determining the two
temporally closest GNSS frames before and after the
current odometry point. A minimum spatial distance
threshold between the GNSS frames used for inter-
polation ensures their well-spread distribution for re-
liable interpolation. The timestamp of the odometry
keyframe is normalized to the range [0,1], with the
smallest GNSS timestamp serving as the minimum
and the biggest GNSS timestamp as the maximum
value. The interpolated position is calculated using
the normalized value. Figure 3 illustrates the func-
tionality of the Keyframe Interpolation graphically.
3.2 Rigid Alignment
Given the interpolated trajectories, the odometry tra-
jectory is optimally aligned to the global trajectory
by applying a rigid transformation. To find the trans-
formation, Umeyama’s (Umeyama, 1991) approach is
used, minimizing the squared error between two point
sets {x
i
} and {y
i
} with n elements:
e
2
(R,t, s) =
1
n
n
∑
i=1
||y
i
− (sRx
i
+t)||
2
(3)
The transformation consists of the rotation matrix R,
the translation vector t, and a scaling factor s. How-
ever, as both trajectories are the same scale, only the
rotational and translational parts of the transformation
are applied to the odometry trajectory and the PCM.
3.3 Rubber-Sheet Transformation
The final step is a piecewise linear Rubber-Sheet
Transformation, derived from the research area of car-
tography (Gillman, 1985). Given a global reference
map, it allows to correct distortions within a map by
dividing it into subdivisions with different transfor-
mations (Marvin S. White and Griffin, 1985). As ex-
isting approaches are designed for standard 2D maps,
we elevate the approach of Leitenstern et al. (Leiten-
stern et al., 2024) to 3D and improve the CP selection
and the triangulation method.
The input parameters for the Rubber-Sheet Trans-
formation are the interpolated, global trajectory and
the rigidly aligned odometry trajectory. CPs are au-
tomatically selected in the first step, leveraging the
correspondence between both trajectories after the
Keyframe Interpolation. A configurable total amount
of CPs is evenly distributed over the trajectories.
However, if the GNSS standard deviation of a poten-
tial CP exceeds a threshold, the CP is skipped. The
set of CPs is then extended by the eight points, form-
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
160
ing a cuboid that encloses the trajectories with a con-
figurable offset. In the next step, a Delaunay trian-
gulation is created from the CPs, using the imple-
mentation of CGAL (Jamin et al., 2024), guarantee-
ing its uniqueness. The Delaunay triangulation is a
well-defined and angle-optimal triangulation on a fi-
nite set of points, and thus, ideal for the given appli-
cation (Gillman, 1985). The transformation matrices
of the resulting tetrahedra are calculated based on the
CPs defining their corners:
p
g,i
= T
j
p
o,i
i ∈ {k, l, m, q} (4)
Here, T
j
presents the linear transformation matrix of
a single tetrahedron, defined by the four CPs p
g,i
and
p
o,i
on the global and odometry trajectory, respec-
tively. Leveraging this relationship for every vertex
i leads to a linear system of equations with 16 vari-
ables, defining the components of T
j
. To solve this
system and thus compute the transformation matrices
T
j
for the single tetrahedra, we employ the House-
holder QR decomposition with full pivoting provided
by Eigen. Finally, the odometry trajectory and the
PCM are transformed by locating the corresponding
tetrahedron for each point x, and applying the corre-
sponding transformation matrix:
x
′
= T
j
x (5)
While the transformation within a tetrahedron re-
mains linear, the boundaries are adjusted in a way
that preserves the topological properties of the map.
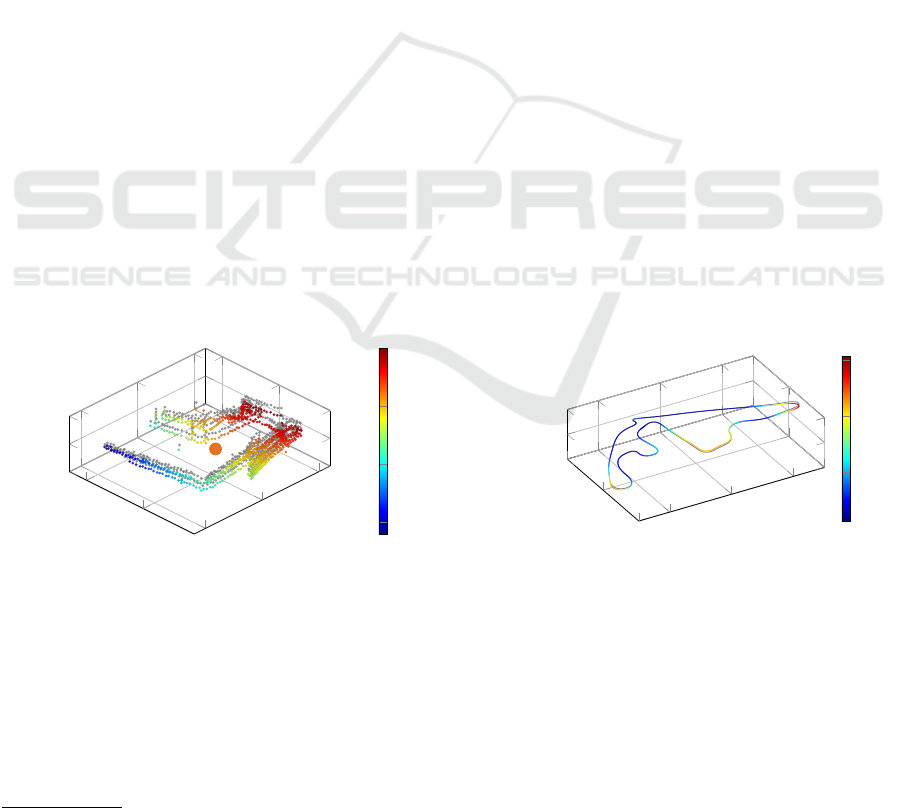
Figure 4 exemplarily illustrates a resulting continuous
PCM. The whole pipeline is implemented as a stan-
50
100
−500
−450
−400
20
40
60
x [m]
y [m]
z [m]
2
3
4
5
Translation [m]
Figure 4: Excerpt of a final PCM with color-coded point
deformations by the Rubber-Sheet Transformation at the
YMC. Gray points represent the PCM after Rigid Alignment
with the orange mark being a selected CP subdividing the
excerpt into tetrahedra.
dalone ROS 2
3
package, leveraging RVIZ to provide
an interactive visualization of the final result.
3
https://ros.org/
4 RESULTS
Both datasets, the YMC, and the KITTI dataset,
comprise RTK-corrected GNSS positions and LiDAR
point clouds, used as input to FlexCloud. As georefer-
encing requires the GNSS positions in a global frame,
raw data of the KITTI dataset is used. However, it
is noted at this point that due to the urban environ-
ment in sequence 00 of the KITTI dataset, the GNSS
positions feature high standard deviations for several
sections. The GNSS positions recorded at the YMC
are post-processed and show standard deviation in the
centimeter range, except for short occlusions. The
initial odometry trajectory and corresponding PCM
are created as described in Section 3. The evaluation
consists of two parts: First, we present quantitative
results on the deviation of the final odometry to the
GNSS trajectory. For this, the Euclidean norm is com-
puted for each point on the odometry trajectory and its
corresponding point on the GNSS trajectory after the
Keyframe Interpolation. In contrast to the Rubber-
Sheet transformation, which only uses selected CPs,
the evaluation is conducted on all trajectory points
without excluding points with high standard devia-
tion. The second part of the evaluation is conducted
on publicly available satellite imagery. This enables a
qualitative evaluation with an external data source.
The resulting trajectories after the Keyframe Interpo-
lation consist of 2560 and 1550 poses for the YMC
and the KITTI dataset, respectively. To improve the
understanding of the pipeline, intermediate results are
presented for the YMC. Figure 5 shows the devia-
−500
0
500
−500
0
500
−200
0
200
x [m]
y [m]
z [m]
5
10
15
Deviation from GNSS [m]
Figure 5: Deviation of the odometry to the GNSS trajectory
(gray) after Rigid Alignment at the YMC.
tion of the odometry to the GNSS trajectory after the
Rigid Alignment step. Although the two trajectories
are optimally aligned with a rigid transformation at
this point, the deviation exceeds 15 m in certain sec-
tions. However, as the deviation is not constant, this
highlights the distortion of the trajectory and thus the
need for the Rubber-Sheet Transformation.
FlexCloud: Direct, Modular Georeferencing and Drift-Correction of Point Cloud Maps
161
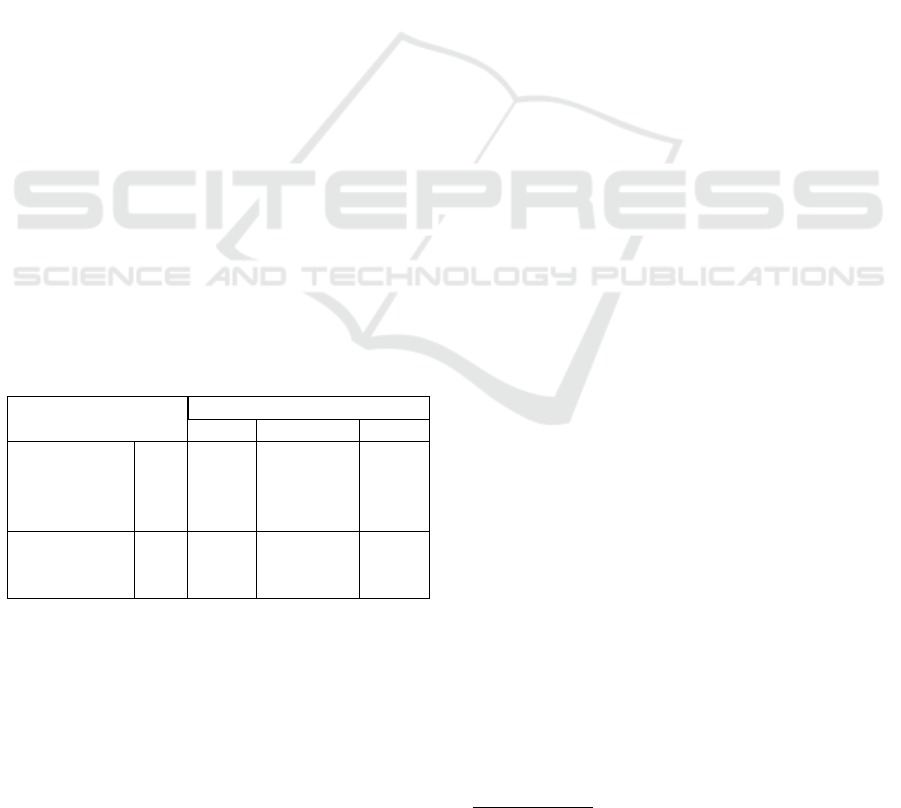
Figure 6 illustrates the triangulation of the odom-
etry trajectory in the Rubber-Sheet Transformation.
First, the CPs are selected based on the configuration,
and the maximum allowed standard deviation of the
GNSS positions (Figure 6a). In the second step, the
corner points of the enclosing cuboid are added, and
the Delaunay triangulation is computed.
Leveraging the transformation matrices computed
from the triangulation, the Rubber-Sheet Transforma-
tion is applied according to Equation 5 to the odom-
etry trajectory and the PCM. The deviation of the fi-
nal odometry to the GNSS trajectory using 200 CPs
for the YMC is illustrated in Figure 7. Comparing
the final deviation to the intermediate results after
the Rigid Alignment step (Figure 5), the benefit of
the Rubber-Sheet Transformation in rectifying the tra-
jectory is clearly visible. Except for a short section
(x ≈ 400 m,y ≈ −800 m), where no CPs are selected
following high GNSS standard deviations, the devia-
tion falls below 1 m for the entire trajectory. The re-
sults for sequence 00 of the KITTI dataset in Figure 8
show similar results. Analogous to the YMC, the de-
viation increases within a section in the middle of the
trajectory due to high GNSS standard deviations pre-
venting the CP selection. As this shows the influence
of the amount and location of the CPs, Table 1 com-
pares the results of different quantities of CPs statis-
tically. For both datasets, the MAE decreases with an
Table 1: Quantitative results for the mean absolute error
(MAE), the standard deviation (STDDEV), and the maxi-
mum value (MAX) of the deviation of the georeferenced
odometry trajectory to the GNSS trajectory. Results are
provided for different amounts of CP n
cp
with a standard
deviation threshold of 0.05 m and 0.25 m for the YMC and
the KITTI dataset, respectively.
Dataset | n
cp
Metric in m
MAE STDDEV MAX
Yas Marina
Circuit
10 1.71 1.59 9.11
50 0.25 0.32 2.56
100 0.13 0.16 1.43
200 0.08 0.11 1.27
KITTI 00
10 1.26 0.77 4.03
50 0.60 0.77 3.71
150 0.47 0.83 4.07
increasing amount of CPs, leading to an average er-
ror of 0.08 m and 0.47 m for the YMC and the KITTI
dataset, respectively. This is expected as the distance
between successive CPs decreases. The larger value
for the KITTI dataset follows from an overall worse
quality of the GNSS positions. While STDDEV and
MAX also decrease with an increasing amount of CPs
for the YMC, this is not observable for the KITTI
dataset. This is due to the long section with insuffi-
cient GNSS accuracy in the middle of the trajectory.
It is noticeable that for n
cp
= 10, the KITTI results are
superior to the YMC despite the worse quality of the
GNSS trajectory. This can be explained by the shorter
overall length of the KITTI dataset, causing a reduced
distance between consecutive CPs.
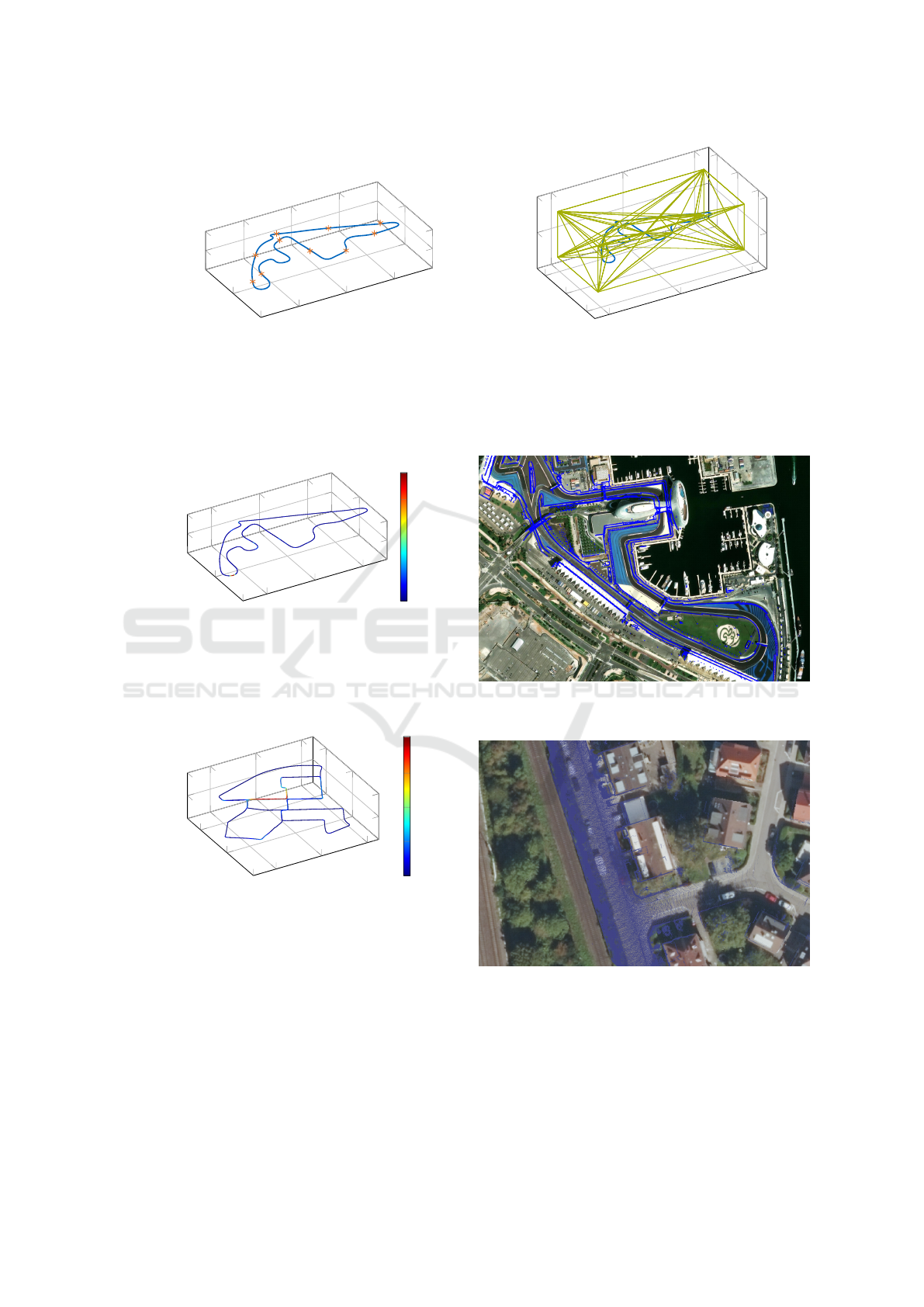
We leverage aerial photography to evaluate the results
independently of the GNSS positions, which are also
used as input to FlexCloud. Although this does not
enable a quantitative but a qualitative evaluation, it al-
lows further investigation of the performance of Flex-
Cloud, especially within the sections with high GNSS
uncertainty. For the YMC, the south part is visualized
over satellite imagery from ESRI (Esri, 2024) (Fig-
ure 9). A visual comparison indicates a strong over-
lap between the PCM and the satellite image, espe-
cially in the turn in the southeast of the image. Al-
though Figure 7 shows an increased deviation be-
tween the trajectories in this section, no deterioration
in the overlap is visible. This proves the ability of
FlexCloud to enable reliable georeferencing even for
short sections with insufficient GNSS coverage.
As the KITTI dataset was recorded in the state of
Baden-W
¨
urttemberg, Germany, public orthophotos
with a resolution of 20 cm are available for evalua-
tion (Figure 10). The shown excerpt is taken from
the southwest of the trajectory (x ≈ −60m,y ≈ 70m)
featuring good GNSS coverage. From the high res-
olution of the orthophoto, it is visible that the road
boundaries and building structures of the PCM ac-
curately match the orthophoto. This indicates that
PCMs georeferenced with FlexCloud can reach the
required accuracy for HD maps given a global trajec-
tory with sufficient accuracy.
5 DISCUSSION
The presented results demonstrate that FlexCloud can
accurately georeference a given local PCM based on
the corresponding odometry and GNSS trajectory.
Nevertheless, our approach still features limitations
and areas for improvement, which are discussed in
this section. By introducing the Keyframe Interpo-
lation, we can directly utilize the GNSS trajectory
recorded by the MMS to generate CPs for georefer-
encing. Although this avoids the need for additional
measurements, it has the following limitations: To
reach an accuracy sufficient for autonomous driving
applications, the MMS needs to be equipped with
an expensive RTK-corrected GNSS receiver. Fur-
thermore, the Keyframe Interpolation requires proper
4
https://www.lgl-bw.de/
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
162
−500
0
500
−500
0
500
−200
0
200
x [m]
y [m]
z [m]
(a) Automatically selected CP (orange dots) on odometry tra-
jectory.
−500
0
500
−1,000
0
1,000
−500
0
500
x [m]
y [m]
z [m]
(b) Tetrahedra of resulting Delaunay triangulation.
Figure 6: Exemplary triangulation of the odometry trajectory (blue) using n
cp
= 10 CP on the YMC. The size of the enclosing
cuboid equals 0.1 and 10 times the expansion of the trajectory in x/y and z, respectively.
−500
0
500
−500
0
500
−200
0
200
x [m]
y [m]
z [m]
0
1
Deviation from GNSS [m]
Figure 7: Final deviation of the odometry trajectory after
Rubber-Sheet Transformation using n
cp
= 200 CP at the
YMC.
0
200
400
0
200
400
−100
0
100
x [m]
y [m]
z [m]
0
1
2
3
Deviation from GNSS [m]
Figure 8: Final deviation of the odometry trajectory after
Rubber-Sheet Transformation using n
cp
= 150 CP on se-
quence 00 of the KITTI dataset (Geiger et al., 2012).
time synchronization between the GNSS receiver and
the LiDAR, as the interpolation leverages the times-
tamp differences between the trajectory positions.
The Rubber-Sheet Transformation leverages several
CPs, a subset of all positions of the trajectories, to
compute the transformation of the PCM. By exclud-
ing GNSS positions with high uncertainty from being
Figure 9: Visualization of PCM of the YMC on satellite
imagery from ESRI (Esri, 2024).
Figure 10: Visualization of PCM of KITTI sequence 00
over orthophotos of the State Office for Geoinformation and
Rural Development (LGL)
4
of Baden-W
¨
urttemberg.
selected as CP, these sections can still be georefer-
enced to a certain extent. However, this requires a
reliable standard deviation estimation of the GNSS
receiver. Furthermore, our current implementation
FlexCloud: Direct, Modular Georeferencing and Drift-Correction of Point Cloud Maps
163

does not utilize the actual values of the GNSS stan-
dard deviation but only excludes high values based
on a fixed threshold. Hence, additional focus must
be spent on post-processing the GNSS positions, e.g.,
using curvature correction. Another point to be in-
vestigated is the shape structure surrounding the tra-
jectories/map during the Rubber-Sheet Transforma-
tion. Although the rectangular cuboid used within this
work shows robust results, limitations arise, e.g., for
trajectories/maps, where the surrounding cuboid fea-
tures large variations in the side lengths. An alterna-
tive approach would be the replacement of the cuboid
with a polygon-like shape.
6 CONCLUSION
FlexCloud provides a framework for direct georef-
erencing and drift-correction of local PCMs cre-
ated from SLAM. Following the modular design,
our approach can be combined with different SLAM
pipelines, utilizing only the generated odometry
trajectory and local PCM. By implementing the
Keyframe Interpolation, the pipeline can directly
leverage the GNSS positions recorded with an MMS,
avoiding the need for additional measurements. The
Rubber-Sheet Transformation enables rectification of
the local PCM and georeferencing of short sections
without accurate GNSS positions. Although our ap-
proach still features limitations, it provides the op-
portunity to georeference PCMs with high accuracy,
allowing their usage for map-based localization al-
gorithms. Future work on the pipeline needs to fo-
cus on the boundary shape used for the Rubber-Sheet
Transformation and improved processing of the initial
GNSS positions based on their standard deviation.
ACKNOWLEDGEMENTS
As the first author, Maximilian Leitenstern initiated
and designed the paper’s structure. He contributed
to designing and implementing the overall pipeline
concept. Christian Bolea-Schaser and Marko Al-
ten contributed to designing and implementing the
Rubber-Sheet Transformation and the Keyframe In-
terpolation during their student research project, re-
spectively. Dominik Kulmer, Marcel Weinmann, and
Markus Lienkamp revised the paper critically for im-
portant intellectual content. Markus Lienkamp gives
final approval for the version to be published and
agrees to all aspects of the work. As a guarantor, he
accepts responsibility for the overall integrity of the
paper.
REFERENCES
Bao, Z., Hossain, S., Lang, H., and Lin, X. (2022). High-
Definition Map Generation Technologies For Au-
tonomous Driving. ArXiv, abs/2206.05400.
Bao, Z., Hossain, S., Lang, H., and Lin, X. (2023). A re-
view of high-definition map creation methods for au-
tonomous driving. Engineering Applications of Artifi-
cial Intelligence, 122:106125.
Chen, X., Milioto, A., Palazzolo, E., Giguere, P., Behley, J.,
and Stachniss, C. (2019). SuMa++: Efficient LiDAR-
based Semantic SLAM. In 2019 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS). IEEE.
Esri (2024). Arcgis world imagery. Available at:
https://www.arcgis.com/apps/mapviewer/index.
html?layers=10df2279f9684e4a9f6a7f08febac2a9
(accessed on 2024-11-29).
Geiger, A., Lenz, P., Stiller, C., and Urtasun,
R. (2013). Vision meets robotics: The
KITTI dataset. The International Journal of
Robotics Research, 32(11):1231–1237. eprint:
https://doi.org/10.1177/0278364913491297.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? The KITTI vision bench-
mark suite. In 2012 IEEE Conference on Computer
Vision and Pattern Recognition, pages 3354–3361.
Gillman, D. (1985). Triangulations for rubber-sheeting.
In Proceedings of 7th International symposium on
computer assisted cartography (AutoCarto 7), volume
199.
Groves, P. (2013). Principles of GNSS, Inertial, and Mul-
tisensor Integrated Navigation Systems, Second Edi-
tion. Artech.
Hariz, F., Souifi, H., Leblanc, R., Bouslimani, Y., Ghribi,
M., Langin, E., and Mccarthy, D. (2021). Direct Geo-
referencing 3D Points Cloud Map Based on SLAM
and Robot Operating System. In 2021 IEEE Inter-
national Symposium on Robotic and Sensors Environ-
ments (ROSE), pages 1–6.
Hess, W., Kohler, D., Rapp, H., and Andor, D. (2016). Real-
time loop closure in 2d lidar slam. In 2016 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 1271–1278.
Jamin, C., Pion, S., and Teillaud, M. (2024). 3D triangula-
tions. In CGAL User and Reference Manual. CGAL
Editorial Board, 6.0.1 edition.
Jeong, J., Yoon, J. Y., Lee, H., Darweesh, H., and Sung,
W. (2022). Tutorial on High-Definition Map Gener-
ation for Automated Driving in Urban Environments.
Sensors, 22(18).
Khoche, A., Wozniak, M. K., Duberg, D., and Jensfelt, P.
(2022). Semantic 3D Grid Maps for Autonomous
Driving. 2022 IEEE 25th International Conference
on Intelligent Transportation Systems (ITSC), pages
2681–2688.
Koide, K., Miura, J., and Menegatti, E. (2019). A
portable three-dimensional LIDAR-based system for
long-term and wide-area people behavior mea-
surement. International Journal of Advanced
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
164

Robotic Systems, 16(2):1729881419841532. eprint:
https://doi.org/10.1177/1729881419841532.
Koide, K., Miura, J., Yokozuka, M., Oishi, S., and Banno,
A. (2021). Interactive 3D Graph SLAM for Map
Correction. IEEE Robotics and Automation Letters,
6(1):40–47.
Lasse Klingbeil (2023). Georeferencing of Mobile Mapping
Data. PhD Thesis, Rheinische Friedrich-Wilhelms-
Universit
¨
at Bonn.
Leitenstern, M., Sauerbeck, F., Kulmer, D., and Betz, J.
(2024). FlexMap Fusion: Georeferencing and Auto-
mated Conflation of HD Maps with OpenStreetMap.
In 35th IEEE Intelligent Vehicles Symposium, IV
2024, IEEE Intelligent Vehicles Symposium, Proceed-
ings, pages 272–278. Institute of Electrical and Elec-
tronics Engineers Inc.
Liu, W., Li, Z., Sun, S., Du, H., and Sotelo, M. A. (2021).
Georeferencing kinematic modeling and error correc-
tion of terrestrial laser scanner for 3D scene recon-
struction. Automation in Construction, 126:103673.
Marvin S. White, J. and Griffin, P. (1985). Piecewise lin-
ear rubber-sheet map transformation. The American
Cartographer, 12(2):123–131.
Oria-Aguilera, H., Alvarez-Perez, H., and Garcia-Garcia,
D. (2018). Mobile LiDAR Scanner for the Gener-
ation of 3D Georeferenced Point Clouds. In 2018
IEEE International Conference on Automation/XXIII
Congress of the Chilean Association of Automatic
Control (ICA-ACCA), pages 1–6.
Osada, E., So
´
snica, K., Borkowski, A., Owczarek-
Wesołowska, M., and Gromczak, A. (2017). A Direct
Georeferencing Method for Terrestrial Laser Scanning
Using GNSS Data and the Vertical Deflection from
Global Earth Gravity Models. Sensors, 17(7).
Paffenholz, J.-A. (2012). Direct geo-referencing of 3D
point clouds with 3D positioning sensors. PhD Thesis,
Leibniz-Universit
¨
at Hannover.
Sauerbeck, F., Kulmer, D., Pielmeier, M., Leitenstern, M.,
Weiß, C., and Betz, J. (2023). Multi-lidar localization
and mapping pipeline for urban autonomous driving.
In 2023 IEEE SENSORS, pages 1–4.
Schuhmacher, S. and Boehm, J. (2005). Georeferencing
of Terrestrial Laserscanner Data for Applications in
Architectural Modelling. International Archives of
Photogrammetry, Remote Sensing and Spatial Infor-
mation Sciences, 36.
Seif, H. G. and Hu, X. (2016). Autonomous Driving in the
iCity—HD Maps as a Key Challenge of the Automo-
tive Industry. Engineering, 2(2):159–162.
Shan, T. and Englot, B. (2018). LeGO-LOAM: Lightweight
and Ground-Optimized Lidar Odometry and Mapping
on Variable Terrain. In 2018 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 4758–4765.
Shan, T., Englot, B., Meyers, D., Wang, W., Ratti, C., and
Rus, D. (2020). LIO-SAM: Tightly-coupled Lidar In-
ertial Odometry via Smoothing and Mapping.
eprint:
2007.00258.
Srinara, S., Chiu, Y.-T., Chen, J.-A., Chiang, K.-W., Tsai,
M.-L., and El-Sheimy, N. (2023). Strategy on High-
Definition Point Cloud Map Creation for Autonomous
Driving in Highway Environments. The Interna-
tional Archives of the Photogrammetry, Remote Sens-
ing and Spatial Information Sciences, XLVIII-1/W2-
2023:849–854.
Umeyama, S. (1991). Least-squares estimation of transfor-
mation parameters between two point patterns. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 13(4):376–380.
Vizzo, I., Guadagnino, T., Mersch, B., Wiesmann, L.,
Behley, J., and Stachniss, C. (2023). KISS-ICP: In
Defense of Point-to-Point ICP Simple, Accurate, and
Robust Registration If Done the Right Way. IEEE
Robotics and Automation Letters, 8(2):1029–1036.
Publisher: Institute of Electrical and Electronics En-
gineers (IEEE).
Wilkinson, B., Mohamed, A., and Dewitt, B. (2015).
Dual-Antenna Terrestrial Laser Scanner Georeferenc-
ing Using Auxiliary Photogrammetric Observations.
Remote Sensing, 7(9):11621–11638.
Wilkinson, B. E., Mohamed, A. H., Dewitt, B. A., and
Seedahmed, G. H. (2010). A Novel Approach to Ter-
restrial Lidar Georeferencing. Photogrammetric En-
gineering & Remote Sensing, 76(6):683–690.
Xu, W., Cai, Y., He, D., Lin, J., and Zhang, F. (2021).
FAST-LIO2: Fast Direct LiDAR-inertial Odometry.
eprint: 2107.06829.
Xu, W. and Zhang, F. (2021). FAST-LIO: A Fast, Ro-
bust LiDAR-inertial Odometry Package by Tightly-
Coupled Iterated Kalman Filter. eprint: 2010.08196.
Zhang, J. and Singh, S. (2014). LOAM : Lidar Odometry
and Mapping in real-time. Robotics: Science and Sys-
tems Conference (RSS), pages 109–111.
FlexCloud: Direct, Modular Georeferencing and Drift-Correction of Point Cloud Maps
165
