
How to Leverage Digital Twin for System Design?
Jean-S
´
ebastien Sottet
1 a
, Pierre Brimont
1 b
, Cedric Pruski
1 c
and Faima Abbasi
1,2 d
1
Luxembourg Institute of Science and Technology, Esch-sur-Alzette, Luxembourg
2
University of Luxembourg, Luxembourg
fi
Keywords:
Model Driven Engineering, Digital Twins, System Design and Operation.
Abstract:
Digital Twins (DT) are deeply rooted in digital simulation environments. Today, they are still considered data-
driven constructs aimed at supporting simulation, optimization, prediction on a physical system. However,
data alone may not completely describe a system. This necessitates additional knowledge, encapsulated within
models, which forms the foundation of the Model-Driven Digital Twins (MDDT) paradigm. At the start of a
DT life-cycle, or when dealing with a system under construction, models becomes the primary artifact enabling
the DT due to the lack of available data. This paper explores the advantages of simultaneously engaging in
model-driven system design while preparing its corresponding DT. Using a real-world case study focused on
developing a hydrogen valley, we demonstrate the substantial benefits of integrating models at the earliest
stages of the DT’s design and implementation process. This covers preparing data collection and sensors, and
incorporating human knowledge throughout the system lifecycle, enhancing replicability.
1 INTRODUCTION
The term Digital Twin (DT) first emerged from the
manufacturing industry in the early 2000 as a digi-
tal replicate (i.e., a twin) of a production line or a
product. If the notions behind Digital Twin are an-
chored in the early digital simulation environments,
it has only been recently formalized by the original
claimed authors of the DT definition (Grieves and
Vickers, 2017). DT aims at supporting any simula-
tion (Boschert and Rosen, 2016; Zhang et al., 2022) or
prospective scenario, such as predictive maintenance
(Liu et al., 2018; Feng et al., 2023), in a digital world.
According to (Grieves and Vickers, 2017), a DT is
composed of three major elements: (i) a physical en-
tity of the real world, (ii) its counterpart in the vir-
tual world (the twin) and (iii) a bidirectional data ex-
change connecting those two worlds. In practice, it is
hard to achieve this pure bidirectional exchange, and
most of the advanced works only consider the real-
ization of a digital shadow. A digital shadow (Becker
et al., 2021) is a digital replica of the physical sys-
tem with few or even no possible feedback actions
on the physical system. Ideally, DTs aim at being
a
https://orcid.org/0000-0002-3071-6371
b
https://orcid.org/0000-0002-0730-7190
c
https://orcid.org/0000-0002-2103-0431
d
https://orcid.org/0009-0001-7484-9256
the exact replica of the physical entity: each action
on the physical system is reproduced on the DT. In
practice, DTs serve as close approximations of real-
ity (Abdoune et al., 2021), as they are often limited
by an incomplete understanding of the system and its
context, unforeseen changes, or the absence of high-
quality data, among other factors.
Digital Twins are often perceived as entities built
exclusively from data, predominantly sourced from
sensors. This data, consisting of various measure-
ments taken from the physical system, is aggre-
gated to form the DT, as discussed in works such as
(Friederich et al., 2022). Consequently, most exist-
ing technological infrastructures, including platforms
like FiWare (Foundation, ) and Azur DT (Microsoft,
2022), are designed with a strong emphasis on sensors
and data management. Those are complemented with
machine-learning models for representing the behav-
ior of the system itself, nurtured from the aforemen-
tioned data.
However, besides data, models describing the sys-
tem conveys significant knowledge that is often ne-
glected (Kirchhof et al., 2020; Bibow et al., 2020;
Sottet and Pruski, 2023; Sottet et al., 2022).
These models are particularly crucial during the
early phases of designing a digital twin because:
• They offer critical system information when data
is unavailable, insufficient, or of poor quality,
Sottet, J.-S., Brimont, P., Pruski, C. and Abbasi, F.
How to Leverage Digital Twin for System Design?.
DOI: 10.5220/0013359700003896
In Proceedings of the 13th International Conference on Model-Based Software and Systems Engineering (MODELSWARD 2025), pages 305-312
ISBN: 978-989-758-729-0; ISSN: 2184-4348
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
305
serving as a foundation for initial design decisions
and simulations.
• They assist in defining the boundaries, objectives,
and functions of the digital twin, ensuring align-
ment with the intended real-world counterpart.
• They provide a structured framework for organiz-
ing and planning the data collection process, iden-
tifying key parameters and sources that need to be
monitored.
• They facilitate stakeholder collaboration by al-
lowing experts to contribute their knowledge and
perspectives, fostering consensus and reducing
misunderstandings through shared viewpoints.
• They enable early prototyping and scenario test-
ing, allowing designers to explore potential con-
figurations, identify risks, and evaluate feasibility
before committing resources to implementation.
• They act as a communication tool, translating
complex system dynamics into comprehensible
representations for diverse teams, including tech-
nical and non-technical stakeholders.
• They help anticipate future challenges by integrat-
ing predictive elements into the design, allowing
for a smoother transition to dynamic and adaptive
digital twin systems.
In this paper, we argue that Model-Driven Digital
Twins (MDDTs) can effectively support the system
throughout its entire lifecycle, including the early de-
sign phases where traditional data-driven digital twins
fall short due to the unavailability of data at the de-
sign stage (Friederich et al., 2022). The selected case,
consisting in the development of a hydrogen valley in
Luxembourg
1
, presents a compelling example: since
the system is not yet developed, we cannot rely on
existing data. Taking this into account, we hypoth-
esize that co-designing the system and its DT, with
alignment across the entire lifecycle of both the phys-
ical system and its twin starting from the earliest de-
sign phases, leads to enhanced consistency, efficiency,
and long-term adaptability in Digital Twin implemen-
tations. We aim at covering a subset of the differ-
ent system concerns, encompassing both technolog-
ical core and environmental, economic, and human
aspects. We consider the current system as an open
world (system borders in evolution) and not yet oper-
ating in runtime mode.
We further propose that this model-driven co-
design approach not only ensures alignment between
the system and its Digital Twin but also creates op-
portunities for seamlessly transferring and replicating
1
LuxHyVal see: https://www.luxhyval.eu/
the methodology across diverse applications and do-
mains.
We propose to develop and illustrate our hypothe-
sis through the creation of a new system and its digital
twin: towards a hydrogen value chain in Luxembourg.
The paper is organized as follows: Section 2 intro-
duced our illustrative case study based on a large ex-
ploratory project of hydrogen value chain. Section 3
proposes an approach to co-design the system and the
twin in our exploratory context. Section 4 discusses
the support of MDDT during the system lifecycle (ex-
ploitation, evolution, transfer).
2 ILLUSTRATIVE CASE STUDY:
HYDROGEN VALUE CHAIN
The complete production and exploitation of hydro-
gen is a complex task pertaining to many domains:
industry, mobility, housing, etc. The relevance and
sustainability of hydrogen as a source of energy is
currently under study and requires understanding the
overall impact (from initial energy provision to mar-
ket sells).
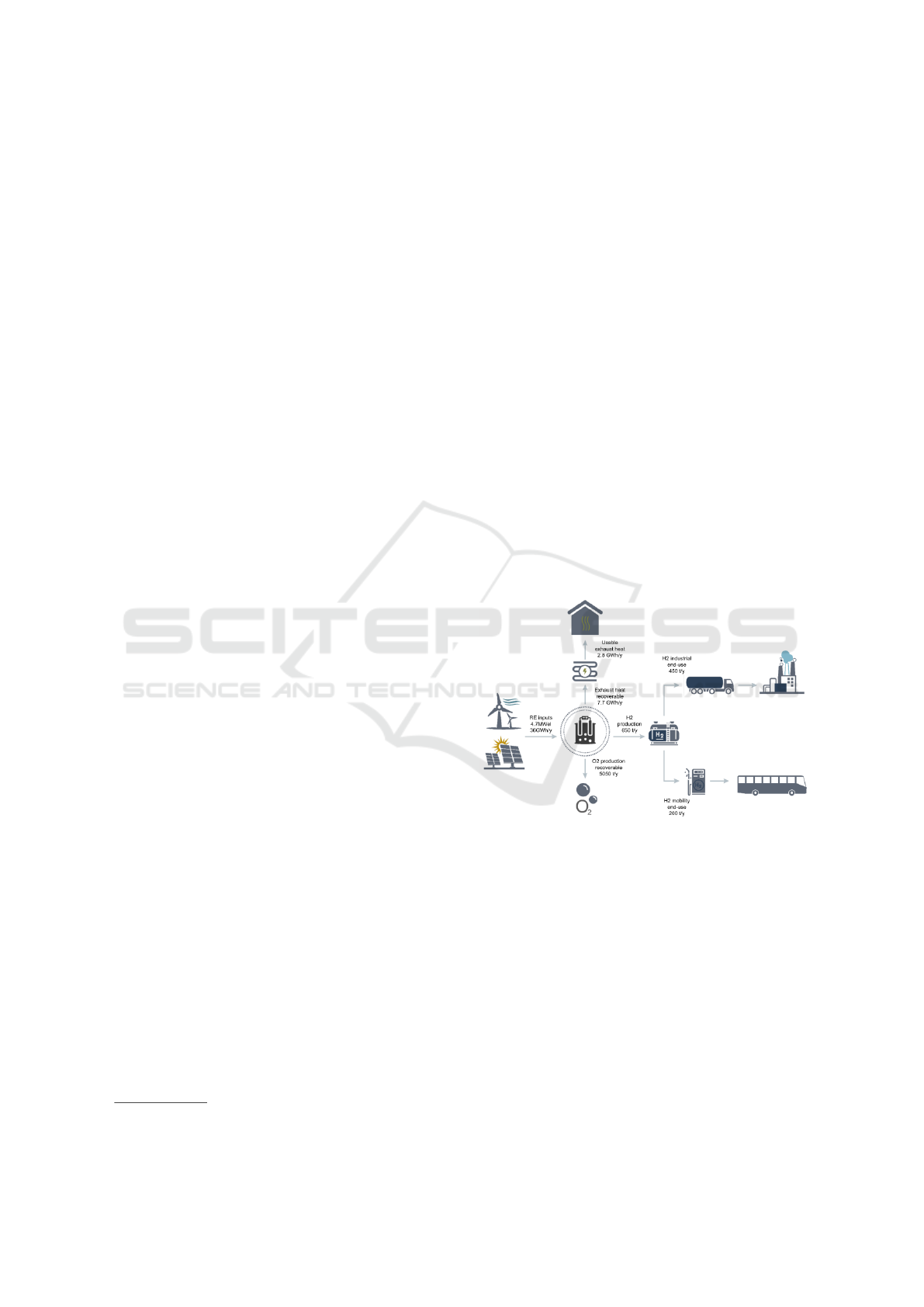
Figure 1: Hydrogen value chain.
The objective of LuxHyVal (see Figure 1) is to
evaluate a complete value chain of hydrogen from
production to consummation (motivated by the reduc-
tion of CO
2
production). The value chain encom-
passes the following aspects:
• The hydrogen produced will be used both for mo-
bility purposes (e.g. hydrogen fuelling stations)
and as an energy source for industry.
• Existing, or short to medium term planned infras-
tructure green energy production (Windmills and
solar panels, on the left-hand side of Figure 1), H
2
pipelines or transportation network.
• Reusing generated heat locally, for, e.g., residen-
tial heating or industrial use.
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
306

To evaluate the optimal implementation of such a
value chain, a DT approach is proposed. This DT en-
ables the analysis of various design alternatives and
what-if scenarios, providing valuable insights. Fur-
thermore, the DT can be leveraged for scaling up the
solution and replicating the hydrogen valley concept
across other sites.
The novelty of our approach is to consider the
DT from the start of the design of the system and its
value chain. When the system and value chain are
not (fully) established, and no data is currently avail-
able. Therefore, it is necessary to make assumptions
about how the value chain will operate and the poten-
tial scenarios that may arise. The co-design of the sys-
tem (system + value chain) and the DT, will rely more
on expertise and knowledge about the expected oper-
ations than on real-time data collection. This involves
various domain experts (e.g., policymakers, mobil-
ity specialists, energy producers, public transporta-
tion managers, etc.) not only in the system design
phase itself but also simultaneously in the design of its
Digital Twin. This co-design process can be seen as
a virtuous cycle: each stakeholder will be committed
to the DT and become deeply involved in its develop-
ment, enhancing its accuracy and, consequently, the
quality of the services it will provide. This approach
requires expertise from various domains, notably en-
compassing models from high-level socio-economic
view (e.g, economical viability of the value chain) to
very technical issue solving (e.g., how to exploit the
green energy production peaks).
One approach is to implement a robust federation
of models (Golra et al., 2016), ensuring that the differ-
ent models are properly interconnected. Model feder-
ation provides several key advantages. First, it en-
ables the integration of diverse domain-specific mod-
els, allowing each to retain its own structure and se-
mantics while contributing to a unified representation
of the system. This approach reduces the need for
extensive re-engineering or restructuring of individ-
ual models, preserving domain expertise and ensur-
ing scalability. Second, federating models supports
modularity, making it easier to update or replace spe-
cific components without disrupting the entire system.
Third, a federation of models promotes collaboration
among stakeholders by providing a shared framework
where different disciplines can contribute their mod-
els while maintaining control over their specific areas.
Co-designing the system and its twin enables op-
timizing the value chain’s operation, planning fu-
ture investments, and enhancing both professional
and public understanding of its benefits. Ultimately,
a similar approach could be used for preparing the
transfer of local experience to larger initiatives and
in different countries.
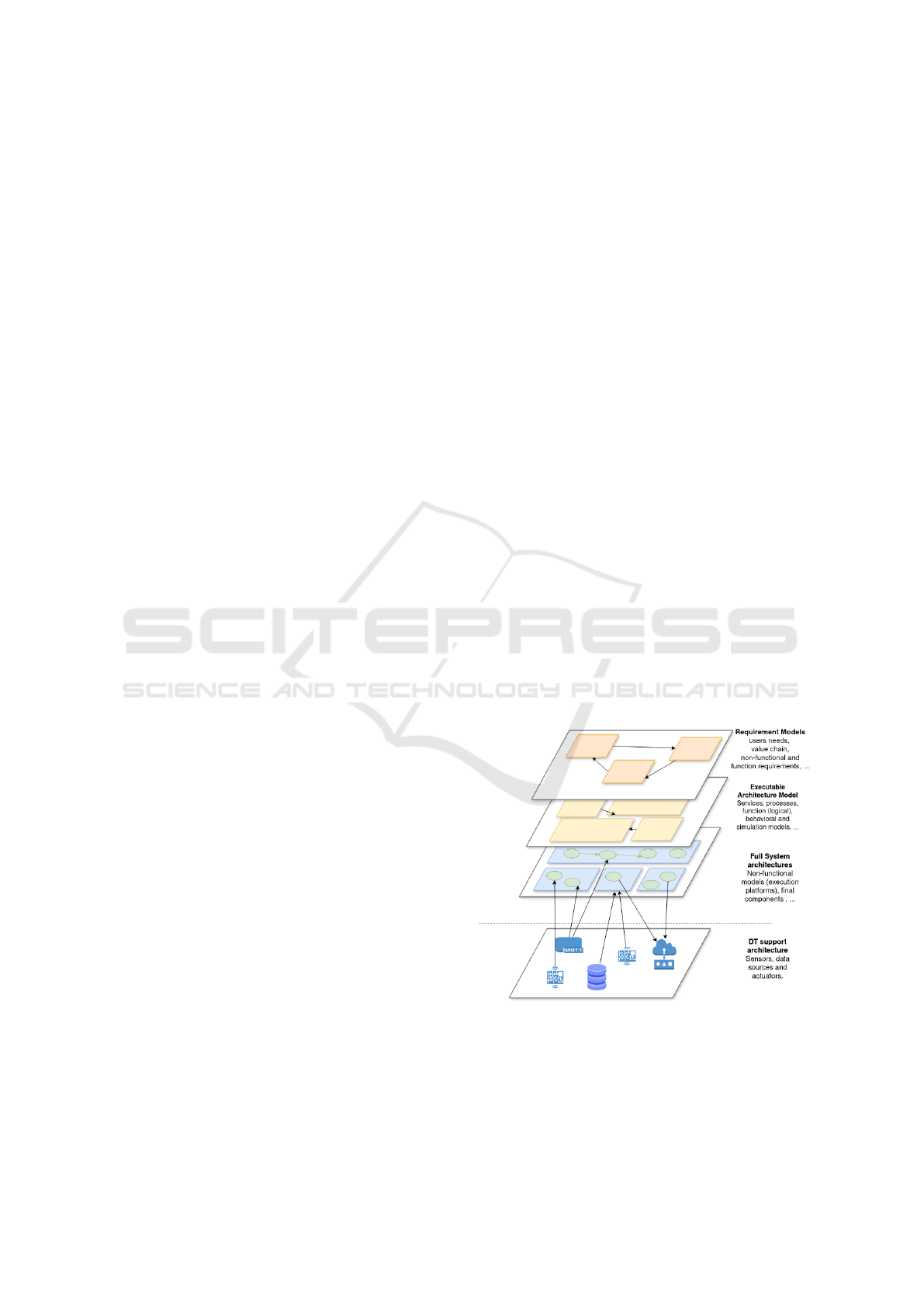
3 DESIGNING MDDT FOR
EXPLORATORY SYSTEMS
In this section, we describe the envisioned design ap-
proach of an MDDT in our specific context. We pro-
pose a progressive design of system models from re-
quirement up to detailed specification and execution
on a given DT platform. This is represented in Fig-
ure 2, by first establishing requirement models, then
deriving an architecture that is progressively refined
(and made executable) to the full system architec-
ture reunifying non-functional and functional require-
ments.
Those design models will be the core of the
MDDT. Our stance is to blur the distinction between
the DT and design models; In line with (Wagg et al.,
2020), the primary goal is to leverage these models to
establish an operational Digital Twin from the outset,
even when minimal or no data is available. The mod-
els in the MDDT can be used at the run-time (Borde-
leau et al., 2020) both for simulation (including early
simulation during the design phase) and monitoring.
The other goal is to ensure that the design models
retain comprehensive information about the system
once it is operational. It also preserves the design ra-
tionale within the MDDT and prevents unwanted be-
havior. Due to this strong interconnection between
the system and the twin through design models, one
additional step (see Figure 2 DT support infrastruc-
ture) consists in designing the support infrastructure
for data collection connected to the DT.
3.1 Early System Design: Identifying
the Stakeholders and High Level
Architectural View
In the context of the Hydrogen valley, building the
corresponding DT starts by identifying all the key
players involved and the limits of the considered sys-
tem. In our case, for example, we are not consider-
ing the private hydrogen cars due to very low mar-
ket penetration. Our approach consists in providing
a high level architectural views including the actors
and their roles, the value chain (value modelling), the
goal and principles and high level (business) services.
Subsequently, we also consider the main services or
technical components to be developed (or existing one
to be adapted, like public transportation migration to
hydrogen). This first architectural description is a
composition of different viewpoints inspired by En-
How to Leverage Digital Twin for System Design?
307
terprise Architecture (e.g., (Greefhorst et al., 2011))
on one side and Manufacturing / System Architec-
ture (e.g., (Benkamoun et al., 2014)) on the other
side. The context in which the system is developed,
notably all the related elements, must be considered
as well. Ideally, the context, should be identified to
provide insights into how the system could operate
in practice within its environment. As no data can
be inferred from a non-operational system, relying on
model-driven approaches is paramount.
3.2 Executable Model Architecture
Exploring and assessing the hydrogen value chain is
one of the core question of hydrogen implementation.
Ideally, we should evaluate the potential development
of hydrogen before the system is put into production.
This preliminary phase must address numerous uncer-
tainties, as there is limited exploitable data to confirm
that a green hydrogen power plant could effectively
integrate into our specific context. As a result, we
adopt a design approach that is progressively refined
through models that can be executed and/or simulate
the system’s behavior early in the design phase (Dah-
mann et al., 2017). This approach necessitates under-
standing external context elements that could impact
the system, such as meteorology, market demand, ur-
ban development, etc. Additionally, we must manage
design-time uncertainty (Famelis and Chechik, 2019)
by making assumptions about system content and be-
havior, using partial models to handle these uncertain-
ties (Bandyszak et al., 2021). In our case study, we
can integrate the early design of the hydrogen produc-
tion system, incorporating estimations with error mar-
gins, with projected future demand for public trans-
portation to calibrate the plant size and required input
energy. Additionally, by providing information about
typical weather patterns for specific times of the year,
we can ensure that green energy production aligns
with demand, optimizing the system’s efficiency and
reliability.
At this stage, we only have models representing
the system, but we can simulate scenarios close to
“what if” analyses typically performed by a digital
twin. The goal of this proto-digital twin (i.e., the
system is not yet in fully running) is to experiment
and quickly identify problematic designs (“fail fast”)
while exploring alternative designs before the system
is implemented. This proactive approach allows us to
refine and optimize the system’s design, reducing the
risk of costly adjustments after deployment.
3.3 System Architecture and
Deployment
In the traditional modelling approach (Roques, 2016),
the last layer consists in preparing the deployment
of the system on its targeted platform (see Fig-
ure 2 Full System Architecture). It integrates both
non-functional (hardware/software support) and func-
tional requirements, offering a comprehensive and de-
tailed architecture. This includes the intricate design
of each system component.
3.4 Preparing Support for Digital
Twining
Beyond this traditional design approach, we can al-
ready prepare the Digital Twin. The data to be col-
lected, particularly the data needed to enable the DT
for its intended purposes (e.g., predictive mainte-
nance, value optimization, etc.), can be directly as-
sociated with specific model components. Similarly,
the operations to be performed back on the system
(e.g., actuators) can be directly connected to model
elements (see lower layer of Figure 2). In terms of
implementation of such a support, we can rely on the
MontiThing approach (Kirchhof et al., 2021) that an-
notates the architectural models with the data to be
collected by IoT sensors and action to be performed
thanks to actuators. We can extend this approach to
non-IoT data sources (any system log, external obser-
vation, databases for contextual data, etc.).
Figure 2: Design layers of Model-Driven Digital Twin.
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
308

4 MDDT DURING SYSTEM
LIFECYCLE
In this section, we describe how the MDDT and the
system are co-evolving together beyond the design
phase. The overall lifecycle is given in Figure 3. It
shows the successive steps starting from the design
phase (see Section 3) to the operationalization and en-
hancement of the system. We did not mention the de-
commissioning and recycling of the system, which is
currently out of the scope of our study. The typical
process is organized as follows: the two first step Re-
quire and Model in Figure 3 corresponds to the first
modelling layer of Figure 2. The Execute phase, uses
the executable or simulated models. The two middle
layers in Figure 2 are used in order to explore design
choices and evaluate the system before it is in produc-
tion. A system and its DT support are deployed at the
beginning of the Align step of Figure 3. This step al-
lows for a progressive alignment of the MDDT to the
system, keeping it up to date according to integration
of operational data. Finally, the Exploit phase takes
place when the MDDT reaches an acceptable level of
fidelity to the system in operation: this level can be re-
lated to a margin of error in the frame of the sensor’s
known errors margin.
When it reached this level of maturity, the MDDT
can deliver its different services: monitoring, predic-
tion, enhancement of the system, etc. After that, it is
possible to enter a new cycle, by extending the system
(Extend phase in Figure 3) or to Export the system in
another context (e.g., another country with other elec-
tricity production profile). In our approach, the exten-
sion is systemically made under a modelling approach
(i.e., Model phase). In the following subsections, we
will focus on the phase that occurs after the design:
DT alignment and exploitation/operationalization, ex-
tension and transferability.
4.1 Alignment and Exploitation
Once we have reached a first deployment of the sys-
tem, we can officially talk about Digital twin: but the
design models of the previous phases should already
behave as close as possible to a real DT. In practice, it
will be necessary to refactor the DT models (keeping
in mind that the system may only be partially opera-
tional), some model flexibility (Sottet and Biri, 2016)
will be necessary to ensure that both the DT and the
physical system could operate together at any time,
even if they are not fully aligned. The Align phase
will consist in a progressive convergence of the twin
and the system based on the feedback from sensed
data. It will consist in analyzing the drifts (David
and Bork, 2023) that could occur between system and
data. The drift can show some valid discrepancy (i.e.,
the MDDT is not aligned with the system) or invalid
due to a sensor defect (Abbasi et al., 2024).
In the Exploit phase, the MDDT could monitor
the system according to data collection support con-
nected to its models. The MDDT relies largely on
models at run time, the models being the represen-
tation of the run-time events, keeping an image of
the state of the system. The complete usefulness of
MDDT as a decision-support tool could occur once
this stage is reached: notably providing realistic simu-
lation of potential future event (what if scenario), pre-
diction of error, optimization of the system, etc.
Ultimately, this progressive alignment all along
the exploitation will hopefully enhance the accuracy
of the MDDT models. but could also foster for a hy-
brid approach of model-driven and data-driven, e.g.,
by replacing a function by a learned model (Sottet
et al., 2022).
4.2 Extending the System
Once the system and the MDDT are aligned, after one
or more iteration(s) of the previous cycle, the system
can be expanded (represented in Figure 3 with pro-
gressive extensions of considered system in the cen-
ter of the cycles). In our example, we first design
the Hydrogen production (without considering green
energy) and try to assess the quantity for the direct
consumers (public transportation, factories) as well
as the potential return on investment. This first cy-
cle is representative of the initial design of a MDDT
along its system. As represented in blue in Figure 3,
the two first steps are purely models (see Section 3)
then the systems and the MDDT are co-existing and
co-evolving in the green part.
We can extend the initial hydrogen producer-
consumer, in a second cycle (middle of Figure 3),
with the indirect beneficiary of the Hydrogen produc-
tion (public heating network and recoverable O
2
pro-
duction); and similarly evaluate the global value and
return on investment. This cycle is completely green,
meaning that from that point on, MDDT and the sys-
tem are co-existing. Nevertheless, during the Model
and Execute phases, the MDDT works in a hybrid
mode: one part is aligned with the current system and
the other part is under study (similar to design phase).
We then have to rely on the models to assess if the
system is sustainable (i.e., from business to technical
perspectives) and for its implementation.
Finally, as illustrated in Figure 3, the final visible
cycle involves integrating green energy production to
evaluate whether the demand can be met with the
How to Leverage Digital Twin for System Design?
309

current energy output. This step also includes plan-
ning for future installations of photovoltaic fields and
windmills to ensure sustainable energy supply. This
last case illustrates a different hybrid approach, as the
country already has existing photovoltaic panels and
windmills. Here, since the extension infrastructure is
already in place, the objective is to derive and inte-
grate models of the existing green energy production
system. The way the system is extended, is indeed a
co-evolution between the system and the MDDT, like
in the Mertens et al. approach (Mertens and Denil,
2023): we ensure a continuum between design and
operation of the system.
4.3 MDDT for System Transferability
The LuxHyVal tends to be an experimental and feasi-
bility prototype that aims at being transferred to dif-
ferent countries. Modelling the context under which
our system behaves is key. In the project, it is im-
portant to have some entry points in external fac-
tors (and related data sources) that influences the Hy-
drogen marker like e.g., transportation need/demand,
public subventions, size of industry that could work
with hydrogen, etc. Such contextual models should
appear in the early modelling phase. The internal el-
ements should also be adapted to the target country
(e.g., availability of green energy production). The
context model of the new country (e.g., local energy
production) will be used to project the prototype in a
different set-up. For instance, the market penetration
of Hydrogen will be less if the country has no plan to
facilitate the conversation of transportation into hy-
drogen. Finally, the proposed MDDT can be used as
a decision-making system at a high level of manage-
ment: country deciders, policymakers, etc.
As summary, our idea is to be able to use the
MDDT as the simulation environment to assess under
which conditions the overall system could be trans-
ferred in a different context. To perform the trans-
fer we can rely on the same approach, thanks to ex-
ecutable models, ideally refined after a first cycle of
implementation.
5 CONCLUSION
We have proposed an approach to design and oper-
ationalize new systems relying on model-based ap-
proach to build both proto-digital twin (i.e., models
of the system under design) and (real) digital twins.
The goal of the proto-digital twin is to assist in the de-
sign of a not yet established system through its Digital
Twin, even when the system is not completely estab-
lished. It helps to design prospective cases, notably in
our situation where the full value chain is not known
a priori. It also helps to identify new concerns of in-
terest that have indirect impact on the system. This
approach facilitates the involvement of stakeholders,
enabling the early capture of their knowledge that can
be seamlessly integrated into the proto-digital twin.
The proposed MDDT approach is blurring the distinc-
tion between design-time and run-time, on which the
different stakeholder can play with like a real DT. The
proposed approach mainly helps to:
• provide feedback on the system feasibility (i.e.,
value chain) as early as possible,
• prepare the data collection to directly feed the
MDDT
• ensure the co-evolution and consistency of
MDDT’s models and the system.
• reduce the usual initial alignment effort between
the system and the twin prior to the development
of decision-support functions.
• support extensions of the system scope with a hy-
brid approach: a model representing an actual part
of the system associated to a pure modeled part
(i.e., proto-digital twin) corresponding to the ex-
tension.
• rely on context models to prepare the transfer of a
similar system into a different context (i.e., a dif-
ferent country).
• operate the transfer based on a similar approach
as MDDT extension.
This approach is a preliminary work, proposing a
methodology to support our case study. Because of
this, the next step of our work will focus on pro-
viding the landscape of models and languages to be
used (e.g., value chain modelling, SysML, etc.). This
will also comprise a deeper search on the models used
to represent the context (i.e., the external influencing
factors), notably understanding where to put the limit
of such open-world DT. Then, we will design or se-
lect an execution language to operate the models. This
will ensure that we can simulate, even at higher level
of abstraction, the behavior of the overall hydrogen
value chain. We will also provide a way to control the
alignment between the MDDT and the system: pro-
viding analysis of the drift (Abbasi et al., 2024). It is
important to understand if the system is in bad health
(e.g., sensors malfunctions) or if the MDDT’s models
are no longer reflecting the system. Our ultimate goal
is to be able to support the co-existence of the sys-
tem and its design rational all along its lifecycle, sup-
ported by the operational notion of MDDT presented
in this article.
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
310

Figure 3: Design and operation cycles of MDDT.
ACKNOWLEDGEMENTS
This research was partially supported by the EU Lux-
HyVal project (DOI10.3030/101111984) and by the
Luxembourg National Research Fund (FNR), project
MDDT-SD grant number C22/IS/17153694.
REFERENCES
Abbasi, F., Brimont, P., Pruski, C., and Sottet, J.-S. (2024).
Understanding semantic drift in model driven digital
twins. In Proceedings of the ACM/IEEE 27th Interna-
tional Conference on Model Driven Engineering Lan-
guages and Systems, pages 419–430.
Abdoune, F., Cardin, O., Nouiri, M., and Castagna, P.
(2021). About perfection of digital twin models.
In International Workshop on Service Orientation in
Holonic and Multi-Agent Manufacturing, pages 91–
101. Springer.
Bandyszak, T., J
¨
ockel, L., Kl
¨
as, M., T
¨
orsleff, S., Weyer, T.,
and Wirtz, B. (2021). Handling uncertainty in collab-
orative embedded systems engineering. Model-Based
Engineering of Collaborative Embedded Systems: Ex-
tensions of the SPES Methodology, pages 147–170.
Becker, F., Bibow, P., Dalibor, M., Gannouni, A., Hahn, V.,
Hopmann, C., Jarke, M., Koren, I., Kr
¨
oger, M., Lipp,
J., et al. (2021). A conceptual model for digital shad-
ows in industry and its application. In International
Conference on Conceptual Modeling, pages 271–281.
Springer.
Benkamoun, N., ElMaraghy, W., Huyet, A.-L., and Kouiss,
K. (2014). Architecture framework for manufacturing
system design. Procedia CIRP, 17:88–93.
Bibow, P., Dalibor, M., Hopmann, C., Mainz, B., Rumpe,
B., Schmalzing, D., Schmitz, M., and Wortmann, A.
(2020). Model-driven development of a digital twin
for injection molding. In International Conference
on Advanced Information Systems Engineering, pages
85–100. Springer.
Bordeleau, F., Combemale, B., Eramo, R., Van Den Brand,
M., and Wimmer, M. (2020). Towards model-driven
digital twin engineering: Current opportunities and
future challenges. In Systems Modelling and Manage-
ment: First International Conference, ICSMM 2020,
Bergen, Norway, June 25–26, 2020, Proceedings 1,
pages 43–54. Springer.
Boschert, S. and Rosen, R. (2016). Digital twin—the sim-
ulation aspect. In Mechatronic futures, pages 59–74.
Springer.
Dahmann, J., Markina-Khusid, A., Doren, A., Wheeler, T.,
Cotter, M., and Kelley, M. (2017). Sysml executable
systems of system architecture definition: A working
example. In 2017 Annual IEEE International Systems
Conference (SysCon), pages 1–6. IEEE.
David, I. and Bork, D. (2023). Towards a taxonomy of
digital twin evolution for technical sustainability. In
2023 ACM/IEEE International Conference on Model
Driven Engineering Languages and Systems Compan-
ion (MODELS-C), pages 934–938. IEEE.
Famelis, M. and Chechik, M. (2019). Managing design-
time uncertainty. Software & Systems Modeling,
18:1249–1284.
Feng, K., Ji, J., Zhang, Y., Ni, Q., Liu, Z., and Beer, M.
(2023). Digital twin-driven intelligent assessment of
gear surface degradation. Mechanical Systems and
Signal Processing, 186:109896.
Foundation, F. Fiware platform.
Friederich, J., Francis, D. P., Lazarova-Molnar, S., and Mo-
hamed, N. (2022). A framework for data-driven digi-
How to Leverage Digital Twin for System Design?
311

tal twins of smart manufacturing systems. Computers
in Industry, 136:103586.
Golra, F. R., Beugnard, A., Dagnat, F., Guerin, S., and Guy-
chard, C. (2016). Addressing modularity for hetero-
geneous multi-model systems using model federation.
In Companion Proceedings of the 15th International
Conference on Modularity, pages 206–211.
Greefhorst, D., Proper, E., Greefhorst, D., and Proper, E.
(2011). The role of enterprise architecture. Springer.
Grieves, M. and Vickers, J. (2017). Digital twin: Mitigat-
ing unpredictable, undesirable emergent behavior in
complex systems. In Transdisciplinary perspectives
on complex systems, pages 85–113. Springer.
Kirchhof, J. C., Malcher, L., and Rumpe, B. (2021). Un-
derstanding and improving model-driven iot systems
through accompanying digital twins. In Proceedings
of the 20th ACM SIGPLAN International Conference
on Generative Programming: Concepts and Experi-
ences, pages 197–209.
Kirchhof, J. C., Michael, J., Rumpe, B., Varga, S., and
Wortmann, A. (2020). Model-driven digital twin
construction: synthesizing the integration of cyber-
physical systems with their information systems. In
Proceedings of the 23rd ACM/IEEE International
Conference on Model Driven Engineering Languages
and Systems, pages 90–101.
Liu, Z., Meyendorf, N., and Mrad, N. (2018). The role
of data fusion in predictive maintenance using digital
twin. In AIP Conference Proceedings, volume 1949,
page 020023. AIP Publishing LLC.
Mertens, J. and Denil, J. (2023). Digital-twin co-evolution
using continuous validation. In Proceedings of the
ACM/IEEE 14th International Conference on Cyber-
Physical Systems (with CPS-IoT Week 2023), pages
266–267.
Microsoft (2022). Azur digital twin.
Roques, P. (2016). Mbse with the arcadia method and the
capella tool. In 8th European Congress on Embedded
Real Time Software and Systems (ERTS 2016).
Sottet, J.-S. and Biri, N. (2016). Jsmf: a flexible javascript
modelling framework. In Workshop on Flexible Model
Driven Eng.(FlexMDE).
Sottet, J.-S., Brimont, P., Feltus, C., G
ˆ
ateau, B., and
Merche, J. F. (2022). Towards a lightweight model-
driven smart-city digital twin. In Proceedings of the
10th Conference on Model-Driven Engineering and
Software Development.
Sottet, J.-S. and Pruski, C. (2023). Data and model harmo-
nization research challenges in a nation wide digital
twin. Systems, 11(2):99.
Wagg, D., Worden, K., Barthorpe, R., and Gardner, P.
(2020). A digital twins: State-of-the-art future direc-
tions for modelling and simulation in engineering dy-
namics application. . ASCE - ASME Journal of Risk
and Uncertainty in Engineering Systems.
Zhang, Y., Feng, K., Ji, J., Yu, K., Ren, Z., and Liu, Z.
(2022). Dynamic model-assisted bearing remaining
useful life prediction using the cross-domain trans-
former network. IEEE/ASME Transactions on Mecha-
tronics.
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
312
